JP2016106814A - Medical image diagnostic apparatus and imaging range display method - Google Patents
Medical image diagnostic apparatus and imaging range display method Download PDFInfo
- Publication number
- JP2016106814A JP2016106814A JP2014246585A JP2014246585A JP2016106814A JP 2016106814 A JP2016106814 A JP 2016106814A JP 2014246585 A JP2014246585 A JP 2014246585A JP 2014246585 A JP2014246585 A JP 2014246585A JP 2016106814 A JP2016106814 A JP 2016106814A
- Authority
- JP
- Japan
- Prior art keywords
- range
- imaging
- top plate
- subject
- shooting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 89
- 238000000034 method Methods 0.000 title claims description 18
- 238000010586 diagram Methods 0.000 claims description 15
- 238000013480 data collection Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 5
- 239000003550 marker Substances 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000002603 single-photon emission computed tomography Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
Images








Landscapes
- Apparatus For Radiation Diagnosis (AREA)
Abstract
Description
本発明は、医用画像診断装置の撮影範囲を制御する技術に関する。 The present invention relates to a technique for controlling an imaging range of a medical image diagnostic apparatus.
近年、被検体の医用画像を撮影し診断する装置として、X線CT装置、MRI装置、X線診断装置、透視撮影装置、SPECT装置、PET装置等の様々な医用画像診断装置が開発されている。
例えば、X線を用いて被検体断層像を撮影するX線CT装置では、被検体を医用寝台装置(以下、寝台という)に載置した状態で、寝台を高さ方向に上下動、体軸方向に前後動、体軸垂直方向に左右動させて、スキャナのX線照射空間に搬入・搬出する。
In recent years, various medical image diagnostic apparatuses such as an X-ray CT apparatus, an MRI apparatus, an X-ray diagnostic apparatus, a fluoroscopic imaging apparatus, a SPECT apparatus, and a PET apparatus have been developed as apparatuses for imaging and diagnosing medical images of a subject. .
For example, in an X-ray CT apparatus that captures a tomographic image of a subject using X-rays, the bed is moved up and down in the height direction while the subject is placed on a medical bed apparatus (hereinafter referred to as a bed). It is moved back and forth in the direction and moved left and right in the direction perpendicular to the body axis, and is carried in and out of the X-ray irradiation space of the scanner.
これらの医用画像診断装置において撮影計画を立てる際、寝台の高さ方向の上下動、体軸方向の前後動、体軸垂直方向に左右動の可動範囲を知ることは、被検体と医用画像診断装置の接触といった事故や、可動範囲外による被検体の撮影失敗、再撮影を避ける上で重要である。 When making an imaging plan in these medical image diagnostic apparatuses, knowing the movable range of the bed in the vertical direction, the longitudinal movement in the body axis direction, and the left and right movement in the vertical direction of the body axis, This is important to avoid accidents such as device contact, imaging failure of the subject due to out of the movable range, and re-imaging.
特許文献1には、被検体の透視画像又は断面像に対して、寝台の高さ方向の上下動、体軸垂直方向の左右動に移動可能な範囲を安全領域として表示し、透視画像又は断面像の任意の位置が診断中心位置として指定されると、指定された診断中心位置が安全領域内にある場合には、診断中心位置が撮影中心位置となるように寝台天板を移動させる医用寝台装置を備える医用画像撮影装置が開示されている。 Patent Document 1 displays a range in which the bed can move in the vertical direction in the height direction and the horizontal movement in the vertical direction of the body axis as a safety region with respect to the fluoroscopic image or cross-sectional image of the subject. When an arbitrary position of the image is designated as the diagnostic center position, if the designated diagnostic center position is within the safety region, the medical couch that moves the bed top so that the diagnostic center position becomes the imaging center position A medical image photographing apparatus including the apparatus is disclosed.
しかしながら、特許文献1では、被検体の体軸方向の撮影可能な範囲については配慮されていなかった。体軸方向についても可動範囲は存在し、しかもこの範囲は撮影条件によっても変化する。このため、撮影位置によっては撮影範囲外となり、所望する位置まで撮影ができず、撮影に失敗する場合があった。 However, in Patent Document 1, no consideration is given to the range in which the subject can be imaged in the body axis direction. There is also a movable range in the body axis direction, and this range also changes depending on the shooting conditions. For this reason, depending on the shooting position, it is outside the shooting range, and shooting to a desired position cannot be performed, and shooting may fail.
本発明は、以上の問題点に鑑みてなされたものであり、その目的とすることは、撮影条件に適合した体軸方向の撮影可能な範囲を視認可能に表したユーザインターフェースを備える医用画像診断装置を提供することを目的とする。 The present invention has been made in view of the above-described problems, and an object of the present invention is to provide a medical image diagnosis including a user interface that can visually recognize a range that can be imaged in the body axis direction that conforms to imaging conditions. An object is to provide an apparatus.
前述した目的を達成するために第1の発明は、被検体を撮影する撮影装置と、前記被検体を載置した天板を前記撮影装置の撮影空間に搬入及び搬出する寝台装置と、撮影条件に応じた前記天板の体軸方向の撮影可能な範囲を算出する算出手段と、算出した前記撮影可能な範囲を表示する表示手段と、を備えることを特徴とする医用画像診断装置である。 In order to achieve the above-described object, the first invention includes an imaging device for imaging a subject, a couch device for carrying in and out of the imaging space of the imaging device, and a imaging device for imaging the subject. A medical image diagnostic apparatus comprising: a calculating unit that calculates a range in which the top plate can be imaged in accordance with the body axis direction; and a display unit that displays the calculated range that can be captured.
第2の発明は、被検体を撮影する撮影装置と、前記被検体を載置した天板を前記撮影装置の撮影空間に搬入及び搬出する寝台装置とを備える医用画像診断装置が実行する、撮影条件に応じた前記天板の体軸方向の撮影可能な範囲を算出する算出ステップと、算出した前記撮影可能な範囲を表示する表示ステップと、を含むことを特徴とする撮影範囲表示方法である。 According to a second aspect of the present invention, there is provided an imaging performed by a medical image diagnostic apparatus comprising: an imaging apparatus that images a subject; and a bed device that carries a top plate on which the subject is placed into and out of an imaging space of the imaging apparatus. An imaging range display method comprising: a calculation step for calculating a range in which the top plate can be imaged according to a condition, and a display step for displaying the calculated range for imaging. .
本発明により、撮影条件に適合した体軸方向の撮影可能な範囲を視認可能に表したユーザインターフェースを備える医用画像診断装置を提供できる。 According to the present invention, it is possible to provide a medical image diagnostic apparatus provided with a user interface in which a range that can be imaged in the body axis direction suitable for imaging conditions is visible.
以下、添付図面を参照しながら、本発明に係る医用画像診断装置を用いた好適な実施形態として、X線CT装置1について説明する。
なお、本発明の実施形態では、X線CT装置1について説明するが、本発明に係る医用画像診断装置は、MRI装置、X線診断装置、透視撮影装置、SPECT装置、PET装置等の様々な医用画像診断装置に適用される。
Hereinafter, an X-ray CT apparatus 1 will be described as a preferred embodiment using a medical image diagnostic apparatus according to the present invention with reference to the accompanying drawings.
In the embodiment of the present invention, the X-ray CT apparatus 1 will be described. However, the medical image diagnostic apparatus according to the present invention includes various devices such as an MRI apparatus, an X-ray diagnostic apparatus, a fluoroscopic apparatus, a SPECT apparatus, and a PET apparatus. It is applied to a medical image diagnostic apparatus.
図1は、本発明を適用したX線CT装置1の全体構成図である。図1に示すように、X線CT装置1は、スキャンガントリ部100、寝台200、及び操作卓300を備える。
FIG. 1 is an overall configuration diagram of an X-ray CT apparatus 1 to which the present invention is applied. As shown in FIG. 1, the X-ray CT apparatus 1 includes a scan gantry unit 100, a
スキャンガントリ部100は、X線源101、X線制御装置102、コリメータ103、コリメータ制御装置104、回転盤105、X線検出器106、データ収集装置107、及びガントリ制御装置108等を備える。
The scan gantry unit 100 includes an
X線源101は、X線制御装置102により制御されて、寝台200の天板202上に載置された被検体に対してX線を連続的または断続的に照射する。X線制御装置102は、操作卓300のシステム制御装置303により決定されたX線管電圧及びX線管電流に従って、X線源101に印加または供給するX線管電圧及びX線管電流を制御する。
The
コリメータ103は、X線源101から放射されたX線を、例えばコーンビーム(円錐形または角錐形ビーム)等のX線として被検体に照射させるものであり、開口幅はコリメータ制御装置104により制御される。被検体を透過したX線はX線検出器106に入射する。
The
回転盤105は、天板202上に載置された被検体が入る開口部を備えるとともに、X線源101、コリメータ103、X線検出器106、データ収集装置107等が搭載される。回転盤105は、ガントリ制御装置108によって制御される回転盤駆動装置から、駆動伝達系を通じて伝達される駆動力によって回転させられ、被検体の周囲を回転する。
The turntable 105 includes an opening for receiving a subject placed on the top plate 202, and an
X線検出器106は、例えばシンチレータとフォトダイオードの組み合わせによって構成されるX線検出素子群をチャネル方向(周回方向)及び列方向(体軸方向)に2次元配列したものであり、被検体を介してX線源101に対向するように配置される。X線検出器106は、X線源101から放射されて被検体を透過したX線を検出し、検出した透過X線データをデータ収集装置107に出力する。
The
データ収集装置107は、X線検出器106に接続され、X線検出器106の個々のX線検出素子により検出される透過X線データを収集し、画像再構成装置304に出力する。
ガントリ制御装置108は、回転盤105の回転と、スキャンガントリ部100の傾きを制御する装置である。
The data collection device 107 is connected to the
The
寝台200は、寝台制御装置201、被検体が載置される天板202、天板駆動装置203、及び上下動装置204等を備える。
寝台制御装置201は、上下動装置204を制御して天板202の鉛直方向の高さを適切なものにする。また、寝台制御装置201は、天板駆動装置203を制御して天板202を体軸方向(天板202の長手方向)に前後動させたり、体軸と垂直方向であって、かつ天板202に平行な方向(左右方向)に移動させたりする。これにより、被検体がスキャンガントリ部100のX線照射空間に搬入及び搬出され、X線を照射するための位置が設定される。
The
The
また本実施形態において、寝台200は位置情報取得装置205を備えてもよい。位置情報取得装置205は、被検体の位置情報を取得する。具体的には、寝台200は、天板202に敷かれたマット等にシートタイプの圧力センサを内蔵し、位置情報取得装置205は、天板202に被検体を載置した際に、天板200上にかかる圧力情報を圧力センサから取得し、圧力情報に基づいて位置情報を取得する。
In the present embodiment, the
また、位置情報取得装置205は、寝台200に備えられず、スキャンガントリ部100の前面上部、又は、X線CT装置1を設置する部屋の天井等に備える光学カメラでもよい。位置情報取得装置205が光学カメラの場合には、取得した画像から画像処理を行って被検体の位置情報を取得する。
なお、位置情報取得装置205は、被検体の位置情報を取得できるものであれば、用いる技術は限定しない。
In addition, the position
The position
操作卓300は、入力装置301、表示装置302、システム制御装置303、画像再構成装置304、記憶装置305、及びバス306を備える。操作卓300は、スキャンガントリ部100及び寝台200と通信接続される。
The console 300 includes an
入力装置301は、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置、及び各種スイッチボタン等により構成され、操作者によって入力される被検体氏名、検査日時、撮影条件、撮影範囲等の各種の情報や指示をシステム制御装置303に出力する。操作者は、表示装置302及び入力装置301を使用して対話的にX線CT装置1を操作する。
The
表示装置302は、液晶パネル、CRT(Cathode-Ray Tube)モニタや液晶ディスプレイ等のディスプレイ装置と、ディスプレイ装置と連携して表示処理を実行するための論理回路で構成され、システム制御装置303に接続される。表示装置302は、画像再構成装置304から出力される再構成画像や透視画像(位置決め用のスキャノグラム画像)、及びシステム制御装置303が取り扱う種々の情報を表示する。
The
システム制御装置303は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等により構成される。システム制御装置303は、スキャンガントリ部100内のX線制御装置102、コリメータ制御装置104、X線検出器106、データ収集装置107、及びガントリ制御装置108を制御し、また、寝台200内の寝台制御装置201等を制御するものである。また、システム制御装置303は、後述する撮影範囲制御処理(図2、図7、図9参照)を実行する。
The
画像再構成装置304は、システム制御装置303の制御によってスキャンガントリ部100内のデータ収集装置107が収集した透過X線データを取得する。透視画像(スキャノグラム画像)撮影時には、データ収集装置107が収集した透視投影データを用いて透視画像を作成する。また、本撮影時には、データ収集装置107が収集した複数ビューの透過X線データを用いて断層像を再構成する。
The
記憶装置305は、ハードディスク等により構成されるものであり、システム制御装置303等に接続される。記憶装置305には、データ収集装置107が収集した透視投影データや透過X線データ、画像再構成装置304が生成する透視画像や断層像等が記憶される。また、これらの各種画像データの他、X線CT装置1の機能を実現するためのプログラムやオペレーティングシステム(OS)等が記憶される。
バス306は、操作卓300を構成する各装置を接続する。
The
The bus 306 connects each device constituting the console 300.
[第1の実施形態]
次に、図2のフローチャート、及び図3〜図6を参照して、第1の実施形態に係るX線CT装置1の動作について説明する。
図2は、第1の実施形態における撮影範囲制御処理の流れを示すフローチャートである。X線CT装置1のシステム制御装置(CPU)303は、記憶装置305から撮影範囲制御処理に関するプログラム及びデータを読み出し、このプログラム及びデータに基づいて処理を実行する。
[First Embodiment]
Next, the operation of the X-ray CT apparatus 1 according to the first embodiment will be described with reference to the flowchart of FIG. 2 and FIGS. 3 to 6.
FIG. 2 is a flowchart showing the flow of the shooting range control process in the first embodiment. A system control device (CPU) 303 of the X-ray CT apparatus 1 reads a program and data related to an imaging range control process from the
まず、ステップS1において、システム制御装置303は、透視画像を撮影する。具体的には、システム制御装置303は、スキャンガントリ部100を制御し、回転盤102を回転させない状態で1方向から被検体に対しX線を照射させ、天板202を被検体の体軸方向へ所定範囲移動させることにより透視撮影(スキャノグラム撮影)を行い、透視投影データを取得し、取得した透視投影データを画像再構成装置304に送出する。画像再構成装置304は、透視投影データに基づいて透視画像を作成し、記憶装置305に記憶する。
First, in step S1, the
次に、ステップS2において、システム制御装置303は、寝台天板情報を取得する。寝台天板情報とは、天板202の体軸方向の可動範囲等の情報である。天板202の可動範囲とは、寝台200に対して、天板202をスキャナガントリ部100の前方(手前方向であり、以下、OUT方向という)の移動可能な限界位置から、スキャナガントリ部100の後方(奥行き方向であり、以下、IN方向という)の移動可能な限界位置までの動かした際の、天板202が移動する距離である。
また、システム制御装置303は、寝台200に対して、天板202をOUT方向の移動可能な限界位置に移動させた際の天板202のIN方向の端と、スキャンガントリ部100のX線源101の中心を含む鉛直線との距離L0も取得する。
Next, in step S2, the
In addition, the
次に、ステップS3において、システム制御装置303は、天板202の撮影範囲を算出する。天板202の撮影範囲とは、天板202をOUT方向の移動可能な限界位置から、IN方向の移動可能な限界位置まで動かした際の、X線源101の中心を含む鉛直線と天板202との交点が、天板202上を移動する距離である。
Next, in step S <b> 3, the
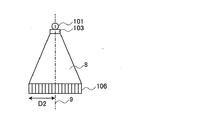
図3は、X線CT装置1を体軸方向及び鉛直方向に垂直な側面から見た際の天板202の可動範囲及び天板202の撮影範囲を示す図である。スキャンガントリ部100のX線源101の中心を含む線(以下、中心線という)を5とし、寝台200に対する天板202の可動範囲をLとする。
FIG. 3 is a diagram illustrating a movable range of the top plate 202 and an imaging range of the top plate 202 when the X-ray CT apparatus 1 is viewed from a side surface perpendicular to the body axis direction and the vertical direction. A line including the center of the
図3に示すように、寝台200に対して、OUT方向の移動可能な限界位置6に天板202aを移動させた際に、天板202aのIN方向の端は中心線5の位置よりL0だけOUT方向にある。
天板202aを距離Lだけ移動させてIN方向の移動可能な限界位置7にすると、位置関係は天板202bのようになり、この際に、中心線5と天板202との交点が天板202上を通過した距離はL−L0となる。
システム制御装置303は、天板202の撮影範囲をL−L0とする。
As shown in FIG. 3, when the
When the
The
図2に戻る。次に、ステップS4において、システム制御装置303は、ステップS3で算出した天板202の撮影範囲を、撮影条件に基づいて調整し、実際の撮影における撮影可能な範囲を算出する。つまり撮影可能な範囲とは、天板202の撮影範囲のIN方向及びOUT方向から、撮影条件によって変化する距離Dを減算したものである。システム制御装置303は、撮影条件によって変化する距離Dを、式(1)により算出する。
Returning to FIG. Next, in step S4, the
![]()
![]()
D1は、天板202の助走距離又は減速距離を示す。撮影には、1回撮影を行う毎に天板202を移動させる方法(以下、ノーマルスキャンという)と、撮影を行いながら天板202を移動させ、らせん状に撮影する方法(以下、ヘリカルスキャンという)とがある。ヘリカルスキャン時には天板202の移動速度が設定された移動速度になっている必要があり、この時、天板202が設定された移動速度に達するまでの助走距離と、天板202を止めるための減速距離とが必要となる。そのため、ヘリカルスキャン時には、天板202の撮影範囲に加えて助走距離と減速距離を考慮する必要がある。この値は、天板202の移動速度によって異なる。システム制御装置303は、設定した移動速度に到達するまでに必要な助走距離及び減速距離をD1として寝台制御装置201より取得する。なお、ノーマルスキャン時には、D1は0である。
D1 shows the run-up distance or deceleration distance of the top plate 202. For photographing, a method of moving the top plate 202 every time one image is taken (hereinafter referred to as normal scan) and a method of moving the top plate 202 while photographing and taking a spiral image (hereinafter referred to as helical scan). ) At the time of the helical scan, the moving speed of the top plate 202 needs to be the set moving speed. At this time, the run distance until the top plate 202 reaches the set moving speed and the top plate 202 for stopping the top plate 202 are required. Deceleration distance is required. Therefore, in the helical scan, it is necessary to consider the approach distance and the deceleration distance in addition to the imaging range of the top plate 202. This value varies depending on the moving speed of the top plate 202. The
D2は、撮影幅の半値を示す。図4は、スキャンガントリ部100を体軸方向及び鉛直方向に垂直な側面から見た際のX線源101からのX線照射範囲8を示す図である。図4に示すように、X線源101が天板202の撮影可能な位置9に達した場合でも、X線照射範囲8に収まるD2の距離分、OUT方向又はIN方向に撮影することが可能となる。このD2は、撮影条件で設定する撮影幅(コリメータ103の開口幅)によっても異なる。システム制御装置303は、X線検出器106の1列当たりの厚さと撮影で使用する列数との積により撮影幅を算出し、その半値をD2として取得する。
D2 indicates a half value of the photographing width. FIG. 4 is a diagram illustrating an X-ray irradiation range 8 from the
D3は、その他の補正距離を示す。その他の補正距離とは、スキャンガントリ部100をティルト動作させた際の傾き角によって変更されるL0の距離や、再構成する画像の厚さによって変更される距離などである。システム制御装置303は、その他の補正距離をD3としてガントリ制御装置108等から取得する。
D3 indicates other correction distances. The other correction distance, and the distance L 0 to be changed by the inclination angle at the time of the scan gantry unit 100 is tilt operation, distance and the like are changed by the thickness of the image to be reconstructed. The
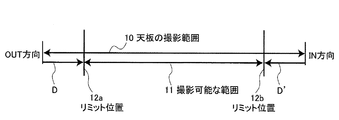
システム制御装置303は、取得したD1、D2、D3から式(1)により天板202のOUT方向の限界距離Dと、IN方向の限界距離D’を算出し、天板202の撮影範囲を限界距離D、D’により調整する。調整の結果、IN方向及びOUT方向の撮影可能な限界位置(リミット位置)を決定する。IN方向とOUT方向の各リミット位置間に含まれる範囲を、撮影可能な範囲とする。
The
図5は、天板202の撮影可能な範囲11及びリミット位置12を示す図である。システム制御装置303は、例えば体軸方向にz軸をとり、天板202の撮影範囲10に対して、OUT方向の端からOUT方向の限界距離Dを加えた位置をOUT方向のリミット位置12aとするととともに、IN方向の端からIN方向の限界距離D’を減算した位置をIN方向のリミット位置12bとし、リミット位置12aとリミット位置12bの間の範囲を、撮影可能な範囲11として算出する。
FIG. 5 is a diagram showing the imageable range 11 and
図2に戻る。次に、ステップS5において、システム制御装置303は、撮影可能な範囲を示すリミット位置と、撮影範囲を設定するためのポインタを備えたユーザインターフェースである撮影範囲の設定画面41を表示装置302表示する。
Returning to FIG. Next, in step S <b> 5, the
図6は、撮影範囲の設定画面41の例を示す図である。撮影範囲の設定画面41は、リミット位置12、マーカ13、ポインタ14、15、撮影位置を示す数値16、17、スピンボックス18、19等を有する。
FIG. 6 is a diagram illustrating an example of the shooting range setting screen 41. The shooting range setting screen 41 includes a
まず、システム制御装置303は、ステップS4で算出したIN方向とOUT方向のリミット位置12を、撮影範囲の設定画面41の縮尺に合わせて縮小して表示する。また、方向がわかるように、リミット位置12の付近に方向を示すマーカ13(「IN」、「OUT」)を表示する。次に、操作者が撮影範囲を設定する際に使用する撮影開始位置のポインタ14と、撮影終了位置のポインタ15を表示する。撮影開始位置のポインタ14と撮影終了位置のポインタ15の下側には、所定の開始位置を基準とした撮影位置を表す数値16、17(「0」、「120」)を表示する。また、スピンボックス18、19を表示し、入力装置301であるキーボードやポインティングデバイスを使用しても、撮影開始位置、撮影終了位置の入力を可能とする。
First, the
次に、ステップS6において、システム制御装置303は、ステップS1で予め撮影されている透視画像を撮影範囲の設定画面41に合わせて表示する。具体的には、システム制御装置303は、図6に示すように、撮影範囲の設定画面41の縮尺に合わせて透視画像20を縮小し、また透視画像20の体軸方向を被検体が天板202に対して載置されている状態と同じになるように回転し、画面上の対応位置に表示する。
Next, in step S <b> 6, the
次に、ステップS7において、システム制御装置303は、操作者から入力装置301を介して撮影範囲の設定を受け付ける。具体的には、図6に示す撮影範囲の設定画面41において、操作者はキーボードやポインティングデバイスを使用してポインタ14、15を移動させたり、スピンボックス18、19に値を入力したりして撮影範囲を設定する。システム制御装置303は、設定された撮影範囲を受け付ける。
Next, in step S <b> 7, the
次に、ステップS8において、システム制御装置303は、受け付けた撮影範囲が、ステップS4で算出した撮影可能な範囲内にあるか否かを判定し、範囲外であれば、撮影可能な範囲に収まるように制御する。具体的には、図6に示す撮影範囲の設定画面41において、操作者がポインタ14、15を移動したり、スピンボックス18、19で値を入力したりして撮影範囲を設定した際、システム制御装置303は、撮影可能な範囲内か否かを判定する。範囲外であれば、リミット位置12(撮影可能な範囲)を超えないようポインタ14、15を戻し、または、スピンボックス18,19の値を撮影可能な範囲内の値に戻す。
Next, in step S8, the
その後、ステップS9において、システム制御装置303は、設定された撮影範囲に基づいて、寝台200の寝台制御装置201を制御するとともに、スキャンガントリ部100のX線制御装置102等を制御して、本撮影動作を行う。
Thereafter, in step S9, the
以上説明したように、第1の実施形態のX線CT装置1(医用画像診断装置)は、天板202の可動範囲から求めた天板202の撮影範囲に対して、撮影条件によって変化するリミット位置を算出することにより撮影可能な範囲を求め、表示装置に表示し、操作者から受け付けた撮影範囲を撮影可能な範囲となるように制御した後、本撮影動作を行う。
これにより、操作者は、撮影計画時に体軸方向に撮影可能な範囲を知ることができるため、撮影時に撮影可能な範囲外に撮影範囲を設定したことによる撮影失敗を防止することができる。
As described above, the X-ray CT apparatus 1 (medical image diagnostic apparatus) according to the first embodiment has a limit that varies depending on imaging conditions with respect to the imaging range of the top plate 202 obtained from the movable range of the top plate 202. The photographing range is obtained by calculating the position, displayed on the display device, and the photographing range received from the operator is controlled to be the photographing range, and then the main photographing operation is performed.
Thereby, since the operator can know the range that can be imaged in the body axis direction at the time of shooting planning, it is possible to prevent a shooting failure caused by setting the shooting range outside the range that can be shot at the time of shooting.
[第2の実施形態]
次に、本発明の第2の実施形態について、図7、図8を参照して説明する。
図7は、第2の実施形態に係る撮影範囲制御処理の流れを示すフローチャートである。第1の実施形態に係る撮影範囲制御処理(図2)と異なるのは、ステップS12とステップS16である。
[Second Embodiment]
Next, a second embodiment of the present invention will be described with reference to FIGS.
FIG. 7 is a flowchart showing the flow of the shooting range control process according to the second embodiment. Steps S12 and S16 are different from the shooting range control process (FIG. 2) according to the first embodiment.
まず、ステップS11において、システム制御装置303は、透視画像を撮影する。
First, in step S11, the
次に、ステップS12において、システム制御装置303は、寝台制御装置201から、天板202の可動範囲等の寝台200及び天板202の情報を取得する。また、この際に、システム制御装置303は、寝台制御装置201から、寝台200(及びスキャンガントリ部100)に対する天板202の現在位置も取得する。
Next, in step S <b> 12, the
次に、ステップS13において、システム制御装置303は、天板202の撮影範囲を算出する。次に、ステップS14において、システム制御装置303は、ステップS13で算出した天板202の撮影範囲に基づいて、撮影可能な範囲を算出する。
Next, in step S <b> 13, the
次に、ステップS15において、システム制御装置303は、撮影可能な範囲を示すリミット位置と、撮影範囲を設定するためのポインタを備えたユーザインターフェースである撮影範囲の設定画面42(図8)を表示装置302表示する。
Next, in step S15, the
次に、ステップS16において、システム制御装置303は、撮影範囲の設定画面42に、天板202を模した天板図、及び、スキャンガントリ部100を模したスキャンガントリ図を重ねて表示する。次に、ステップS17において、システム制御装置303は、予め透視画像を撮影している場合には、撮影範囲の設定画面42に合わせて透視画像を表示する。
Next, in step S <b> 16, the
図8は、撮影範囲の設定画面42の例を示す図である。リミット位置12〜透視画像20は、第1の実施形態に係る撮影範囲の設定画面41と同一である。
FIG. 8 is a diagram illustrating an example of the shooting range setting screen 42. The
システム制御装置303は、天板図21及びスキャンガントリ図22を、撮影範囲の設定画面42の縮尺に合わせて縮小する。天板202とリミット位置12との実際の比率に対応する位置に、天板図21を表示する。また、システム制御装置303は、ステップS12で取得した寝台200(及びスキャンガントリ部100)に対する天板202の現在位置から、天板202に対するスキャンガントリ部100の位置を算出し、それに応じた天板図21に対する位置に、スキャンガントリ図22を表示する。すなわち、天板202が移動した場合、撮影範囲の設定画面42上では、天板図21の位置が移動するのではなく、対応するスキャンガントリ図22の位置が更新される。
また、撮影範囲の設定画面42は、IN/OUT方向反転ボタン23を有し、ボタンをクリックすると、リミット位置12、マーカ13、ポインタ14、15、撮影位置を示す数値16、17、透視画像20、天板図21、及びスキャンガントリ図22の表示を左右反転する。
The
The shooting range setting screen 42 has an IN / OUT
図7に戻る。次に、ステップS18において、システム制御装置303は、操作者から入力装置301を介して撮影範囲の設定を受け付ける。次に、ステップS19において、システム制御装置303は、受付けた撮影範囲が、撮影可能な範囲内にあるか否かを判定し、範囲外であれば、撮影可能な範囲に収まるように制御する。その後、ステップS20において、システム制御装置303は、設定された撮影範囲に基づいて、スキャンガントリ部100及び寝台200を制御し、本撮影動作を行う。
Returning to FIG. Next, in step S <b> 18, the
第2の実施形態にX線CT装置1(医用画像診断装置)により、操作者は、リミット位置が天板202上でどの位置にあるのか大まかな位置を特定することができる。これにより、被検体を天板202に載置する際、撮影失敗とならない位置に誘導することが可能となる。 With the X-ray CT apparatus 1 (medical image diagnostic apparatus) according to the second embodiment, the operator can specify a rough position where the limit position is on the top plate 202. This makes it possible to guide the subject to a position where imaging failure does not occur when the subject is placed on the top board 202.
また、主にX線CT装置1では、メンテナンスの一環として定期的に空気を撮影するエアーキャリブレーションの実施が必要となる。この際、天板202をスキャンガントリ部100内から移動する必要があるが、第2の実施形態では、ユーザインターフェース上で、現在のスキャンガントリ部100と天板202の位置関係を容易に把握することができるため、エアーキャリブレーションの実施をスムーズに行うことができる。 In addition, mainly in the X-ray CT apparatus 1, it is necessary to perform air calibration for periodically imaging air as part of maintenance. At this time, it is necessary to move the top plate 202 from the scan gantry unit 100. In the second embodiment, the current positional relationship between the scan gantry unit 100 and the top plate 202 is easily grasped on the user interface. Therefore, the air calibration can be performed smoothly.
[第3の実施形態]
次に、本発明の第3の実施形態について、図9、図10を参照して説明する。
図9は、第3の実施形態に係る撮影範囲制御処理の流れを示すフローチャートである。第2の実施形態に係る撮影範囲制御処理(図7)と異なるのは、透視画像の撮影及び表示をしない点と、ステップS26及びステップS27である。
[Third Embodiment]
Next, a third embodiment of the present invention will be described with reference to FIGS.
FIG. 9 is a flowchart showing the flow of the shooting range control process according to the third embodiment. The difference from the shooting range control process (FIG. 7) according to the second embodiment is that a fluoroscopic image is not shot and displayed, and step S26 and step S27.
まず、ステップS21において、システム制御装置303は、寝台制御装置201から、天板202の可動範囲等の寝台200及び天板202の情報を取得する。また、この際に、システム制御装置303は、寝台制御装置201から、寝台200(及びスキャンガントリ部100)に対する天板202の現在位置も取得する。
First, in step S <b> 21, the
次に、ステップS22において、システム制御装置303は、天板202の撮影範囲を算出する。次に、ステップS23において、システム制御装置303は、ステップS22で算出した天板202の撮影範囲に基づいて、撮影可能な範囲を算出する。
Next, in step S22, the
次に、ステップS24において、システム制御装置303は、撮影可能な範囲を示すリミット位置と、撮影範囲を設定するためのポインタを備えたユーザインターフェースである撮影範囲の設定画面43(図10)を表示装置302表示する。
Next, in step S24, the
次に、ステップS25において、システム制御装置303は、撮影範囲の設定画面43に、天板202を模した天板図、及び、スキャンガントリ部100を模したスキャンガントリ図を重ねて表示する。
Next, in step S <b> 25, the
次に、ステップS26において、システム制御装置303は、寝台200に備えられる位置情報取得装置205から、被検体の位置情報を取得する。具体的には、位置情報取得装置205は、天板202に敷かれたシートタイプの圧力センサーから得られた圧力情報に基づき、被検体の位置情報(位置座標)を取得し、システム制御装置303は、位置情報取得装置205から、被検体の位置情報と圧力情報を取得する。
Next, in step S <b> 26, the
次に、ステップS27において、システム制御装置303は、ステップS26で取得した被検体の位置情報又は圧力情報を画像化して被検体位置画像とし、撮影範囲の設定画面43の天板図21に重ねて表示する。
Next, in step S27, the
図10は、撮影範囲の設定画面43の例を示す図である。リミット位置12〜スピンボックス19、天板図21、及びスキャンガントリ図22は、第2の実施形態に係る撮影範囲の設定画面42と同一である。
システム制御装置303は、被検体位置画像30を撮影範囲の設定画面43の縮尺に合わせて縮小し、体軸方向を回転して、天板図21に重ねて表示する。
FIG. 10 is a diagram illustrating an example of the shooting range setting screen 43. The
The
図9に戻る。次に、ステップS28において、システム制御装置303は、操作者から入力装置301を介して撮影範囲の設定を受け付ける。
Returning to FIG. Next, in step S <b> 28, the
次に、ステップS29において、システム制御装置303は、受付けた撮影範囲が、撮影可能な範囲内にあるか否かを判定し、範囲外であれば、撮影可能な範囲に収まるように制御する。その後、ステップS30において、システム制御装置303は、設定された撮影範囲に基づいて、スキャンガントリ部100及び寝台200を制御し、本撮影動作を行う。
Next, in step S29, the
なお、ステップS26において、システム制御装置303は、寝台200に備えられる位置情報取得装置205から、被検体の位置情報と圧力情報を取得するとしたが、位置情報取得装置205はこれに限られない。
例えば、位置情報取得装置205は、スキャンガントリ部100の前面上部、又は、X線CT装置1を設置する部屋の天井等に備える光学カメラとしてもよい。この場合には、ステップS26において、システム制御装置303は、位置情報取得装置205から撮影した画像を取得する。そして、ステップS27において、システム制御装置303は、取得した画像に対して適宜画像処理を行い、被検体位置画像30を生成し、撮影範囲の設定画面43の天板図21に重ねて表示する。
In step S26, the
For example, the position
第3の実施形態にX線CT装置1(医用画像診断装置)により、天板202上で被検体の位置が明確になり、撮影範囲が撮影可能な範囲から外れているか否かを判断することができる。また、被検体の位置を特定することができるため、透視画像を撮影することなく撮影範囲を設定することができ、被検体の被ばく量の低減を期待できる。 The X-ray CT apparatus 1 (medical image diagnostic apparatus) according to the third embodiment determines whether or not the position of the subject is clear on the top board 202 and the imaging range is out of the imaging range. Can do. In addition, since the position of the subject can be specified, the imaging range can be set without taking a fluoroscopic image, and a reduction in the exposure amount of the subject can be expected.
以上、添付図面を参照しながら、本発明に係る医用画像診断装置の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。 The preferred embodiments of the medical image diagnostic apparatus according to the present invention have been described above with reference to the accompanying drawings, but the present invention is not limited to such examples. It will be apparent to those skilled in the art that various changes or modifications can be conceived within the scope of the technical idea disclosed in the present application, and these naturally belong to the technical scope of the present invention. Understood.
1…………………………X線CT装置
100……………………スキャンガントリ部
101……………………X線源
106……………………X線検出器
108……………………ガントリ制御装置
200……………………寝台
201……………………寝台制御装置
202……………………天板
205……………………位置情報取得装置
300……………………操作卓
301……………………入力装置
302……………………表示装置
303……………………システム制御装置
10………………………天板の撮影範囲
11………………………撮影可能な範囲
12………………………リミット位置
13………………………マーカ
14、15………………ポインタ
16、17………………撮影位置を示す数値
18、19………………スピンボックス
20………………………透視画像
21………………………天板図
22………………………スキャンガントリ図
20………………………透視画像
30………………………被検体位置画像
41、42、43………撮影範囲の設定画面
1. X-ray CT system 100 ..........
Claims (8)
前記被検体を載置した天板を前記撮影装置の撮影空間に搬入及び搬出する寝台装置と、
撮影条件に応じた前記天板の体軸方向の撮影可能な範囲を算出する算出手段と、
算出した前記撮影可能な範囲を表示する表示手段と、
を備えることを特徴とする医用画像診断装置。 An imaging device for imaging a subject;
A bed apparatus for carrying in and out of the imaging space of the imaging apparatus the tabletop on which the subject is placed;
A calculating means for calculating a photographing possible range in the body axis direction of the top plate according to photographing conditions;
Display means for displaying the calculated imageable range;
A medical image diagnostic apparatus comprising:
ことを特徴とする請求項1に記載の医用画像診断装置。 The calculation means calculates a shooting range on the top plate from a movable range of the top plate in the body axis direction, and the calculated shooting range is a distance until the top plate reaches a predetermined speed with respect to the bed apparatus. The medical image diagnostic apparatus according to claim 1, wherein an imageable range in the body axis direction is calculated by adjusting based on a distance from the predetermined speed to the stop.
前記算出手段は、前記天板の体軸方向の可動範囲から天板上の撮影範囲を算出し、算出した前記撮影範囲を、前記撮影装置の前記撮影幅の半値に基づいて調整することにより、前記体軸方向の撮影可能な範囲を算出する
ことを特徴とする請求項1に記載の医用画像診断装置。 The imaging apparatus images the subject placed on the top board with a predetermined imaging width in the body axis direction,
The calculation means calculates a shooting range on the top plate from a movable range of the top plate in the body axis direction, and adjusts the calculated shooting range based on a half value of the shooting width of the shooting device, The medical image diagnostic apparatus according to claim 1, wherein an imageable range in the body axis direction is calculated.
入力された前記撮影範囲が前記体軸方向の撮影可能な範囲に収まらない場合に、前記撮影範囲を前記体軸方向の撮影可能な範囲に収まるように制御する制御手段と、
を更に備えることを特徴とする請求項1乃至請求項3のいずれか1項に記載の医用画像診断装置。 An input means for inputting a shooting range;
Control means for controlling the imaging range to be within the range that can be imaged in the body axis direction when the input imaging range does not fall within the range that can be imaged in the body axis direction;
The medical image diagnostic apparatus according to any one of claims 1 to 3, further comprising:
ことを特徴とする請求項1に記載の医用画像診断装置。 The medical image diagnostic apparatus according to claim 1, wherein the display unit displays a previously captured fluoroscopic image in a predetermined position.
ことを特徴とする請求項1に記載の医用画像診断装置。 The medical image diagnostic apparatus according to claim 1, wherein the display unit displays a figure simulating the bed apparatus according to a predetermined position.
前記表示手段は、取得した前記被検体の位置情報を、前記寝台装置を模した図に合わせて表示する
ことを特徴とする請求項6に記載の医用画像診断装置。 Further comprising position information acquisition means for acquiring position information of the subject;
The medical image diagnostic apparatus according to claim 6, wherein the display unit displays the acquired position information of the subject in accordance with a diagram simulating the bed apparatus.
撮影条件に応じた前記天板の体軸方向の撮影可能な範囲を算出する算出ステップと、
算出した前記撮影可能な範囲を表示する表示ステップと、
を含むことを特徴とする撮影範囲表示方法。 A medical image diagnostic apparatus that includes an imaging device that images a subject, and a bed device that carries in and out of the imaging space of the imaging device a top plate on which the subject is placed, is executed.
A calculation step for calculating a range in which the top plate can be imaged according to imaging conditions;
A display step for displaying the calculated imageable range;
An imaging range display method comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014246585A JP2016106814A (en) | 2014-12-05 | 2014-12-05 | Medical image diagnostic apparatus and imaging range display method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014246585A JP2016106814A (en) | 2014-12-05 | 2014-12-05 | Medical image diagnostic apparatus and imaging range display method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016106814A true JP2016106814A (en) | 2016-06-20 |
Family
ID=56121353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014246585A Pending JP2016106814A (en) | 2014-12-05 | 2014-12-05 | Medical image diagnostic apparatus and imaging range display method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016106814A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111528875A (en) * | 2020-04-23 | 2020-08-14 | 上海逸动医学科技有限公司 | X-ray scanning system based on linearization path |
| EP3821809A1 (en) * | 2019-11-13 | 2021-05-19 | Agfa Nv | Patient positioning method for radiographic imaging |
-
2014
- 2014-12-05 JP JP2014246585A patent/JP2016106814A/en active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3821809A1 (en) * | 2019-11-13 | 2021-05-19 | Agfa Nv | Patient positioning method for radiographic imaging |
| CN111528875A (en) * | 2020-04-23 | 2020-08-14 | 上海逸动医学科技有限公司 | X-ray scanning system based on linearization path |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5948275B2 (en) | Radiographic apparatus, radiographic method, and radiographic control program | |
| US7764762B2 (en) | Radiation CT apparatus and radiation CT method | |
| JP5675117B2 (en) | X-ray CT apparatus and control program for X-ray CT apparatus | |
| US7881423B2 (en) | X-ray CT apparatus and X-ray radiographic method | |
| JPWO2010101208A1 (en) | X-ray CT apparatus and tomographic imaging method | |
| JP2007185514A (en) | Imaging medical device and method for setting operation parameters of imaging medical device | |
| CN104010573A (en) | X-ray diagnostic apparatus and method for controlling the same | |
| JP5308862B2 (en) | Medical bed apparatus and medical image photographing apparatus | |
| JP6125257B2 (en) | Medical diagnostic apparatus and image processing apparatus | |
| JP5697422B2 (en) | X-ray diagnostic equipment | |
| JP5442363B2 (en) | X-ray CT system | |
| US10123763B2 (en) | X-ray CT system | |
| JP2012148028A (en) | X-ray ct apparatus | |
| JP2016106814A (en) | Medical image diagnostic apparatus and imaging range display method | |
| JP6560322B2 (en) | X-ray CT system | |
| JP2014108111A (en) | Radiation tomograph and program | |
| JP6831673B2 (en) | Radiation tomography equipment and programs | |
| JP6662612B2 (en) | Medical image diagnostic equipment | |
| JP5676883B2 (en) | X-ray CT system | |
| JP5913957B2 (en) | X-ray CT system | |
| JP4679951B2 (en) | X-ray CT system | |
| JP2016198277A (en) | Control device for tomosynthesis imaging, radiographic system, control system, control method, and program | |
| JP7392478B2 (en) | Magnification calculation device, long-length photographing system, program, and magnification calculation method | |
| US20250228514A1 (en) | Medical image capturing apparatus and control method of the same | |
| US20240281917A1 (en) | Medical image capturing apparatus and control method of the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20160509 |