JP2016004261A - 腕を伸ばす向きの変化でメロディーを演奏する健康遊具 - Google Patents
腕を伸ばす向きの変化でメロディーを演奏する健康遊具 Download PDFInfo
- Publication number
- JP2016004261A JP2016004261A JP2014135064A JP2014135064A JP2016004261A JP 2016004261 A JP2016004261 A JP 2016004261A JP 2014135064 A JP2014135064 A JP 2014135064A JP 2014135064 A JP2014135064 A JP 2014135064A JP 2016004261 A JP2016004261 A JP 2016004261A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration sensor
- main body
- arm
- melody
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 66
- 239000011295 pitch Substances 0.000 claims description 16
- 230000036541 health Effects 0.000 claims description 4
- 230000033001 locomotion Effects 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 3
- 230000005484 gravity Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000004630 mental health Effects 0.000 description 1
- 230000033764 rhythmic process Effects 0.000 description 1
- 230000004936 stimulating effect Effects 0.000 description 1
Images










Landscapes
- Toys (AREA)
- Electrophonic Musical Instruments (AREA)
Abstract
【課題】左右の腕を伸ばす方向を変更することにより異なった音高を発音し、その結果メロディーを演奏することができる健康遊具を提供すること。
【解決手段】健康遊具1の本体2上には加速度センサ4が装着されており、利用者は保持部3を持って左右の腕を様々な方向に伸ばすことにより、加速度センサの向きを変えることができる。コントローラ5は、左右の加速度センサ4L,4Rの向きの組み合わせに対応させてあらかじめ定められた音高データを生成し、これをアンプ6経由でスピーカ7に送信することでメロディーを生成することができる。
【選択図】図1
【解決手段】健康遊具1の本体2上には加速度センサ4が装着されており、利用者は保持部3を持って左右の腕を様々な方向に伸ばすことにより、加速度センサの向きを変えることができる。コントローラ5は、左右の加速度センサ4L,4Rの向きの組み合わせに対応させてあらかじめ定められた音高データを生成し、これをアンプ6経由でスピーカ7に送信することでメロディーを生成することができる。
【選択図】図1
Description
この発明は左右の腕を伸ばす方向を検知し、方向に応じた音高を発音してメロディーを演奏する健康遊具である。
従来、身体の動きを検知して発音する演奏装置が知られている(特許文献1、特許文献2参照)。
上記技術は、楽曲演奏が主目的であり、健康のための身体動作の喚起には不十分である。また、検知する身体動作はスティックを振り下ろすなど、加速度を生み出す動作が主たる対象である。このため、リズムや強弱の表現をコントロールすることは容易であるが、メロディー演奏のように、ドレミファソラシドなどの音程を正確に区別する動作をコントロールすることが難しい。また、特許文献1においては、加速度を生み出す動作以外に身体の向きを地磁気センサで検知する提案もなされているが、この場合、検知可能な身体動作が水平方向の回転に限定されるため、腕の上下運動などの検知が難しい。
前記課題を解決するため、本発明は、左右一対の本体部上にそれぞれ加速度センサを装着し、この加速度センサの装着向きについては、本体部先端方向を左、上、右に向けたとき、加速度サンサの一つの軸に対する重力加速度検出値がそれぞれ、1G,0、−1Gとなるよう装着したものである。
また、本発明は左右本体部上のそれぞれの加速度センサの出力値を取得し、その値を基に音高を決定し、音高に応じた楽音を生成するコントローラと、このコントローラからの楽音出力を増幅するアンプ及びスピーカから構成される。
本発明により、左右本体部を動かす動作そのものではなく、動作結果としての本体部の向きの違いでドレミファソラシドなどの異なった音程が生成できる。このため、音高を区別する必要のあるメロディー演奏が容易になると同時に左右の腕を左、上、右と伸ばすことで、普段あまり使う機会のない腕の運動をメロディー演奏を楽しみながら行うことができ、身体のみならず心の健康にも効果を発揮するものである。
以下、添付図面を参照して、本発明に係わる実施形態1について説明する。
図1は実施形態1の斜視図である。本体部2には保持部3が付いており、左右本体部2L、2R上の部品はリード線9を通して電気的に接続されている。本体部2は平面を有していることが好ましい。これは、使用者が本体部2に装着されている加速度センサ4の向きを認識しやすくするためである。
左右本体部2L,2Rには、加速度センサ(左)4Lと加速度センサ(右)4Rが、それぞれ装着されている。
本体部(左)2L上には、さらに、コントローラ5、アンプ6、スピーカ7が装着され、また、保持部(左)3L上には発音ボタン8が装着されている。
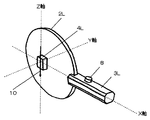
図2は本体部(左)2Lに対して加速度センサ(左)4Lをどのような向きで装着するかを示したものである。図2において,保持部(左)3Lの長さ方向の中心軸をX軸とする。また、X軸に直交し本体部(左)2Lが構成する面に含まれ、かつ、加速度センサ(左)4Lを通過する線をZ軸とする。さらに、X軸とZ軸の交点で両軸に直交する軸をY軸とする。図2において、本体部(左)2Lは、Z軸の下向き方向が重力加速度1Gの方向に一致するよう配置されているものとする。このとき、加速度センサ(左)4Lの一つの軸(3軸加速度センサを利用する場合は、その中のいずれか1つの軸)がこの重力加速度1Gの方向と一致するように配置し、かつ、重力加速度の最大値、すなわち、1Gを検知する向きに装着するものとする。
この結果、本体部(左)2Lが図2の向きに置かれている場合、加速度センサ(左)4Lは1Gの重力加速度を検知し、本体部(左)2Lの先端(保持部と逆の先端位置)が図2の上方向(Z軸上方向)に向けた場合は0Gを検知し、本体部(左)2Lの先端(保持部と逆の先端位置)を図2の右方向(X軸右方向)に向けた場合は−1Gを検知することになる。
図には書かれていないが、本体部(右)2R上の加速度センサ(右)4Rについても前記同様の向きに装着するものとする。
図3は実施形態1に係わる正面図であり、各構成要素の関係を示すものである。
コントローラ5は加速度センサ(左)4Lと加速度センサ(右)4Rから出力されるアナログ・データを入力し、これをA/D変換する。また、コントローラ5は発音ボタン8のON/OFFに対応したデジタル・データを入力する。コントローラ5は、もし、発音ボタン8がON(押されている)の場合は、加速度センサ(左)4Lと加速度センサ(右)4Rの出力値に対応した音高データを計算し、その音高データをアンプ6に送る。アンプ6は増幅された音高データをスピーカ7に送る。この結果、スピーカ7からは加速度センサ(左)4Lと加速度センサ(右)4Rの向き、すなわち、本体部(左)2Lと本体部(右)2Rのそれぞれの向きの組み合わせに応じた音高を発音する。図4と図5を用いてさらに詳しい説明を以下で行う。
図4はコントローラ5の内部構成図である。
コントローラ5はADコンバータ51,CPU52、ROM53、RAM54から構成されている。
ADコンバータ51は、加速度センサ4のアナログ出力をデジタル出力に変換し、CPU52に送る。また、発音ボタン8のON/OFF状態はデジタル値としてCPU52に送られる。
CPU52は、発音ボタン8がONである場合に限り、ADコンバータ(左)51L、および、ADコンバータ(右)51RからのA/D変化されたデータ(その値が1G、0G,−1G)を基に加速度センサ(左)4Lと加速度センサ(右)4Rの向きを判定し、それぞれの向きの組み合わせに応じた音高データを生成する。生成された音高データはアンプ6に送られ、アンプ6の出力はスピーカ7に送られ、スピーカ7は送られた音高の音を発音する。
ROM53にはコントローラ5をコントロールするためのプログラムが保存され、RAM54には実行時のプログラム、ADコンバータ51や発音ボタン8から入力されたデータ、また、プログラムの処理過程で発生、処理されるデータが格納される。
図5はコントローラ5をコントロールするプログラムのフローチャートである。以下にその説明をする。
S1では、加速度センサからのデータをA/Dコンバータがデジタル変換したデータを読み込む。S2では、S1で読み込まれたデータがそれぞれ1G,0G,−1Gのいずれに対応するかを判定する。ここで実際に入力されたデータは正確には1G,0G,−1Gに対応しない場合があり、一定幅のぶれを生じているものと想定される。このため、プログラムでの判定は、一定のぶれを見込んだ範囲で行うものとする。すなわち、ぶれを10%と看做した場合は、0.9G〜1.0Gを1G、−0.1G〜0.1Gを0G,−0.9G〜−1.0Gを−1Gと判定する。また、上記判定でデータが1G,0G,−1Gのいずれにも対応しない場合は、S1に戻って再度データを入力するものとする。
S3では発音スイッチ8からのデジタル入力データ値を元に発音スイッチ8がONかOFFかを判定する。もし、ONであれば、S4に進み、S2で判定した加速度センサ(左)4Lと加速度センサ(右)4Rの重力加速度値(1G,0G,−1G)に応じた音高データを表1の対応表に基づいて生成する。もし、発音スイッチ8がOFFの場合はS1に戻るものとする。

S5では、S4で生成した音高データをアンプ6に出力するものとする。この結果、加速度センサ(左)4Lの3通りの向きと加速度センサ(右)の3通りの向きの組み合わせに対応したドレミファソラシドなどの音高がスピーカから発音されることになる。
図6で上記実施形態1の使用例の説明を行う。61では、使用者は本体部(左)2Lの先端を左方向に伸ばしている。この結果、本体部(左)2L上の加速度センサ(左)4Lからは1Gが出力される。また、使用者は本体部(右)2Rの先端を左方向に伸ばしている。この結果、本体部(右)2R上の加速度センサ(右)4Rからも同じく1Gが検出される。この結果、表1の規則に基づき本大部(左)2L上のスピーカ7からは「ド」の音が発音される。なお、このとき、使用者は発音したいタイミングで発音ボタン8を押し、発音を続けたい時間の間発音ボタン8を押し続けるものとする。
62では、使用者は本体部(左)2Lの先端を左方向に伸ばし、本体部(右)2Rの先端を上方向に伸ばしている。この結果、加速度センサ(左)4Lからは1Gが、加速度センサ(右)4Rからは0Gが検出される。この結果、表1の規則に基づきスピーカ7からは「レ」の音が発音される。以下、63〜68についても同様に「ミ」「ファ」「ソ」「ラ」「シ」「ド」が発音される。
次に、図7を参照して、本発明に係わる実施形態2について説明する。
実施形態2においては、実施形態1における加速度センサ(左)4Lの出力および発音ボタン8の出力を無線送信機(左)71Lから、また、加速度センサ(右)4Rの出力を無線送信機(右)71Rからそれぞれ無線送信し、これを無線受信機および発音装置72上の無線受信機721で受信するものとする。受信されたデータはコントローラ722で実施形態1と同様に処理され、その出力はアンプ723へ送信され、アンプの出力はスピーカ724に送信されるものとする。以上により実施形態2においては、本体部(左)2Lと本体部(右)2Rを繋ぐリード線9が不要となり、左右本体部2L,2Rの操作に対する制約が少なくなる。また、コントローラ、アンプ、スピーカを本体部2と独立させることで、発音される楽音の音質、音量、音色などでより柔軟性を持った楽曲演奏が可能となる。
次に、図8を参照して、本発明に係わる実施形態3について説明する。
実施形態3においては、実施形態2で使用した本体部2を腕時計型本体部81で置き換えたものであり、本体を腕時計のように左右の腕に装着できるようにしたものである。このことにより本体部を意識的に保持する必要がなくなると同時に、狭い部屋などで本体部が他の物にぶつかるなどの事故を防ぐことができ、より起動 的な使用が可能となる。腕時計型本体部81は、実施形態1と同様に平面を有していることが好ましい。
次に、図9、図10、図11を参照して、本発明に係わる実施形態4について説明する。
実施形態4は実施形態1の本体部2をスティック本体部92に置き換えたものである。また、加速度センサ94の向きを図10に示すように、保持部93の延長方向に伸びる中心線をX軸とするとき、加速度センサ94の重力加速度最大値検知方向がX軸と一致するよう加速度センサの向きを調整して装着するものとする。
加速度センサの向きをこのように設置することで、利用者は図11に示すようなスティック本体部の操作により「ド」「レ」「ミ」「ファ」「ソ」「ラ」「シ」「ド」を発音することができるようになる。このことにより、実施形態4の使用者は実施形態1の使用者とは異なる腕の運動を促進することができる。
1 遊具、 2 本体部、 2L 本体部(左)、 2R 本体部(右)、
3 保持部、 3L 保持部(左) 3R 保持部(右)、 4 加速度センサ、
4L 加速度センサ(左)、 4R 加速度センサ(右)、 5 コントローラ、
6 アンプ、 7 スピーカ、 8 発音スイッチ、 9 リード線、 10 加速度センサの重力加速度の最大値検知方向、 51 ADコンバータ、 51L ADコンバータ(左)、 51R ADコンバータ(右)、 52 CPU、
53 ROM、 54 RAM、 61〜68 「ド」「レ」「ミ」「ファ」「ソ」「ラ」「シ」「ド」を発音する場合の本体部2の向き、 71 無線送信機、 71L 無線送信機(左)、 71R 無線送信機(右)、 72 無線受信機および発音装置、 721 無線受信機、 722 コントローラ、 723 アンプ、
724 スピーカ、 81 腕時計型本体部、 81L 腕時計型本体部(左)、
81R 腕時計型本体部(右)、 82 加速度センサ、 82L 加速度センサ(左)、 82R 加速度センサ(右)、 83 送信部、 83L 送信部(左)、
83R 送信部(右)、 84 発音スイッチ、
90 加速度センサの重力加速度値最大検知方向 92 スティック本体部、
92L スティック本体部(左)、 92R スティック本体部(右)、
93 スティック保持部、 93L スティック保持部(左)、
93R スティック保持部(右)、 94 加速度センサ、
94L 加速度センサ(左)、 94R 加速度センサ(右)、 95 コントローラ、
96 アンプ、 97 スピーカ、 98 発音スイッチ、 99 リード線、
111〜118 「ド」「レ」「ミ」「ファ」「ソ」「ラ」「シ」「ド」を発音する場合のスティック本体部92の向き
3 保持部、 3L 保持部(左) 3R 保持部(右)、 4 加速度センサ、
4L 加速度センサ(左)、 4R 加速度センサ(右)、 5 コントローラ、
6 アンプ、 7 スピーカ、 8 発音スイッチ、 9 リード線、 10 加速度センサの重力加速度の最大値検知方向、 51 ADコンバータ、 51L ADコンバータ(左)、 51R ADコンバータ(右)、 52 CPU、
53 ROM、 54 RAM、 61〜68 「ド」「レ」「ミ」「ファ」「ソ」「ラ」「シ」「ド」を発音する場合の本体部2の向き、 71 無線送信機、 71L 無線送信機(左)、 71R 無線送信機(右)、 72 無線受信機および発音装置、 721 無線受信機、 722 コントローラ、 723 アンプ、
724 スピーカ、 81 腕時計型本体部、 81L 腕時計型本体部(左)、
81R 腕時計型本体部(右)、 82 加速度センサ、 82L 加速度センサ(左)、 82R 加速度センサ(右)、 83 送信部、 83L 送信部(左)、
83R 送信部(右)、 84 発音スイッチ、
90 加速度センサの重力加速度値最大検知方向 92 スティック本体部、
92L スティック本体部(左)、 92R スティック本体部(右)、
93 スティック保持部、 93L スティック保持部(左)、
93R スティック保持部(右)、 94 加速度センサ、
94L 加速度センサ(左)、 94R 加速度センサ(右)、 95 コントローラ、
96 アンプ、 97 スピーカ、 98 発音スイッチ、 99 リード線、
111〜118 「ド」「レ」「ミ」「ファ」「ソ」「ラ」「シ」「ド」を発音する場合のスティック本体部92の向き
Claims (2)
- 加速度センサを設置した本体部と利用者が腕を伸ばす向きを変更することでこの本体部上の加速度センサの向きを変更するための保持部を有し、利用者が腕を伸ばす向きを変更した結果として変化する加速度センサの静止時の向きを検知し、その検知された加速度センサの互いに異なる向きに対応づけられた互いに異なる音高を発音することでメロディーを演奏する健康遊具。
- 本体部上の加速度センサに関し、その検出値が腕を伸ばす3通りの向きにより、1G,0G,−1Gになるよう加速度センサの装着向きを調整したメロディーを演奏する請求項1記載の健康遊具。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014135064A JP2016004261A (ja) | 2014-06-13 | 2014-06-13 | 腕を伸ばす向きの変化でメロディーを演奏する健康遊具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014135064A JP2016004261A (ja) | 2014-06-13 | 2014-06-13 | 腕を伸ばす向きの変化でメロディーを演奏する健康遊具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016004261A true JP2016004261A (ja) | 2016-01-12 |
Family
ID=55223546
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014135064A Pending JP2016004261A (ja) | 2014-06-13 | 2014-06-13 | 腕を伸ばす向きの変化でメロディーを演奏する健康遊具 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016004261A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018089538A (ja) * | 2018-03-26 | 2018-06-14 | 株式会社バンダイ | 演出出力玩具 |
| KR101982968B1 (ko) * | 2018-02-26 | 2019-05-28 | 강준택 | 장난감 및 사용자 맞춤형 장난감 시스템 |
-
2014
- 2014-06-13 JP JP2014135064A patent/JP2016004261A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101982968B1 (ko) * | 2018-02-26 | 2019-05-28 | 강준택 | 장난감 및 사용자 맞춤형 장난감 시스템 |
| WO2019164216A1 (ko) * | 2018-02-26 | 2019-08-29 | 강준택 | 장난감 및 사용자 맞춤형 장난감 시스템 |
| US11202967B2 (en) | 2018-02-26 | 2021-12-21 | Jun Taek KANG | Toy and user-customized toy system |
| JP2018089538A (ja) * | 2018-03-26 | 2018-06-14 | 株式会社バンダイ | 演出出力玩具 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6127367B2 (ja) | 演奏装置及びプログラム | |
| CN103325365B (zh) | 音发生装置和方法 | |
| JP5573899B2 (ja) | 演奏装置 | |
| CN102347020B (zh) | 乐音产生控制设备 | |
| JP5182655B2 (ja) | 電子打楽器およびプログラム | |
| CN102467900A (zh) | 输入装置 | |
| JP2011128427A (ja) | 演奏装置、演奏制御装置及びプログラム | |
| JP2013195466A (ja) | 演奏装置及びプログラム | |
| JP2012032680A (ja) | 演奏装置および電子楽器 | |
| JP2013040991A (ja) | 操作子、操作方法及びプログラム | |
| JP2016004261A (ja) | 腕を伸ばす向きの変化でメロディーを演奏する健康遊具 | |
| RU2018107967A (ru) | Озвученная марионетка | |
| JP2007256736A (ja) | 電気楽器 | |
| JP5316816B2 (ja) | 入力装置およびプログラム | |
| JP2002023742A (ja) | 発音制御システム、操作ユニットおよび電子打楽器 | |
| JP2010175754A (ja) | 姿勢評価装置、姿勢評価システム、プログラム | |
| JP6610120B2 (ja) | 音制御装置、方法、プログラム及び電子楽器 | |
| JP5309655B2 (ja) | 信号処理装置 | |
| JP5082730B2 (ja) | 音データ生成装置および方向センシング発音楽器 | |
| JP6094111B2 (ja) | 演奏装置、演奏方法及びプログラム | |
| JP2008249771A (ja) | 演奏処理システム、演奏処理装置及び演奏処理プログラム | |
| JP2011123248A (ja) | 音量制御装置、楽音制御装置、再生装置及びプログラム | |
| JP6098081B2 (ja) | 演奏装置、演奏方法及びプログラム | |
| JP6281198B2 (ja) | 入力装置、演奏装置、入力方法およびプログラム | |
| JP6234197B2 (ja) | 電子ハンドベルシステム |