JP2015114194A - 境界検知装置、境界検知方法およびプログラム - Google Patents
境界検知装置、境界検知方法およびプログラム Download PDFInfo
- Publication number
- JP2015114194A JP2015114194A JP2013255890A JP2013255890A JP2015114194A JP 2015114194 A JP2015114194 A JP 2015114194A JP 2013255890 A JP2013255890 A JP 2013255890A JP 2013255890 A JP2013255890 A JP 2013255890A JP 2015114194 A JP2015114194 A JP 2015114194A
- Authority
- JP
- Japan
- Prior art keywords
- error
- boundary
- azimuth
- boundary detection
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 122
- 238000012937 correction Methods 0.000 claims abstract description 33
- 230000002093 peripheral effect Effects 0.000 claims abstract description 4
- 238000012545 processing Methods 0.000 claims description 38
- 238000000034 method Methods 0.000 claims description 30
- 230000006870 function Effects 0.000 claims description 13
- 238000010586 diagram Methods 0.000 description 9
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
Images








Landscapes
- Navigation (AREA)
Abstract
【課題】より迅速かつ精度良く立体駐車場からの出庫を判定することができる。
【解決手段】 境界検知装置は、周辺リンクに対する位置誤差および方位誤差を算出する自車状態検知部と、前記自車状態検知部により算出された位置誤差および方位誤差を用いて、立体駐車場と道路との間の境界を検知する境界検知部と、前記境界検知部により前記境界が検知された場合、位置誤差および方位誤差を補正する誤差補正部と、前記誤差補正部による補正後の位置誤差および方位誤差を用いて出庫判定を行う出庫判定部と、を備える。
【選択図】図1
【解決手段】 境界検知装置は、周辺リンクに対する位置誤差および方位誤差を算出する自車状態検知部と、前記自車状態検知部により算出された位置誤差および方位誤差を用いて、立体駐車場と道路との間の境界を検知する境界検知部と、前記境界検知部により前記境界が検知された場合、位置誤差および方位誤差を補正する誤差補正部と、前記誤差補正部による補正後の位置誤差および方位誤差を用いて出庫判定を行う出庫判定部と、を備える。
【選択図】図1
Description
本発明は、境界検知装置、境界検知方法およびプログラムに関する。
特許文献1には、駐車場進入/脱出を判定できる駐車場進入/脱出検出装置が開示されている。かかる装置は、所定のタイミングで平面及び高さ方向の移動距離を計算し、移動距離を用いて勾配を計算し、勾配の絶対値が設定値より大きくなったとき、駐車場に進入したと判定する。また、駐車場進入が検出されたときの車両の相対高度を範囲内に含む所定の高度範囲を設定し、自車位置が高度範囲内に存在する場合は、脱出判定に使用する設定距離を小さくし、高度範囲外に存在する場合は設定距離を大きくし、道路と併走する併走距離を算出し、併走距離が設定距離以上になったとき駐車場から脱出したと判定する。
上記の駐車場進入/脱出検出装置は、道路との併走距離に応じて立体駐車場から脱出したことを判定する。言い換えれば、立体駐車場から脱出したか否かは、リンクとの形状比較を行うことにより判定される。このようなリンクとの形状比較を行う場合、車両は、ある程度の距離を走行することが必要となる。しかしながら、立体駐車場の走行により方位誤差が生じている状態で相応の距離を走行すると、方位誤差に基づく位置誤差が蓄積され、精度良く脱出を判定することが難しいという問題がある。
そこで、本発明は、より迅速かつ精度良く立体駐車場からの出庫を検知することができる境界検知装置の提供を目的とする。
上記課題を解決するため、本発明に係る境界検知装置は、周辺リンクに対する位置誤差および方位誤差を算出する自車状態検知部と、前記自車状態検知部により算出された位置誤差および方位誤差を用いて、立体駐車場と道路との間の境界を検知する境界検知部と、前記境界検知部により前記境界が検知された場合、位置誤差および方位誤差を補正する誤差補正部と、前記誤差補正部による補正後の位置誤差および方位誤差を用いて出庫判定を行う出庫判定部と、を備える。
本発明によれば、より迅速かつ精度良く立体駐車場からの出庫を判定することができる。なお、上記以外の課題、構成および効果等は、以下の実施形態の説明により明らかにされる。
以下、本発明の一実施形態について説明する。
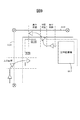
図1は、本実施形態に係る境界検知装置として機能するナビゲーション装置100の概略構成図である。ナビゲーション装置100は、演算処理装置1と、ディスプレイ10と、記憶装置11と、音声入出力装置13と、入力装置16と、ROM装置20と、車速センサ21と、ジャイロセンサ22と、GPS(Global Positioning System)受信装置23と、FM多重放送受信装置24と、ビーコン受信装置25と、を備えている。また、これらの各装置やセンサは、バスによって相互に接続され、データの受け渡しが可能な構成となっている。
なお、ナビゲーション装置100とは、地図上における自車位置の特定、地図や交通情報などの表示、推奨経路の探索、経路誘導など、いわゆるナビゲーション機能を実現することができる装置のことである。
演算処理装置1は、ナビゲーション装置100の様々な処理を行う中心的なユニットである。例えば、演算処理装置1は、記憶装置11に格納されている地図情報12を用いて、出発地および目的地を結ぶ推奨経路を探索する。また、演算処理装置1は、ディスプレイ10の表示領域に表示する地図情報12、交通情報、経路情報などをグラフィックス変換し、ディスプレイ10に出力する。また、演算処理装置1は、経路誘導を行うための音声情報を生成し、これをスピーカに出力する。
また、演算処理装置1は、車速センサ21やジャイロセンサ22といった各種センサおよびGPS受信装置23から出力される情報(以下、「車両センサ情報」という)を用いて、地図上における自車位置、車両方位、周辺リンクとの位置誤差および方位誤差などを算出する。
また、演算処理装置1は、位置誤差および方位誤差を用いて境界(例えば、駐車場と道路との境界)を検知する境界検知処理を行う。
また、演算処理装置1は、境界を検知した場合に自車位置および車両方位の補正を行い、補正後の位置誤差、方位誤差、GPS受信装置23による信号の受信状況およびリンクの勾配、高度情報などを用いて出庫判定処理を行う。また、演算処理装置1は、出庫判定により出庫したことを検知した場合、マップマッチング処理および音声案内を再開する。
なお、演算処理装置1は、算出した自車位置、方位誤差および位置誤差などの情報をRAMなどのメモリに一時的に格納する。
このような演算処理装置1は、数値演算、各装置およびセンサの制御など、様々な処理を実行するCPU(Central Processing Unit)2と、プログラムやデータ、演算結果などを一時的に格納するRAM(Random Access Memory)3と、プログラムやデータなどを格納するROM(Read Only Memory)4と、各種ハードウェアを演算処理装置1と接続するためのI/F(インターフェース)5と、を有している。また、CPU2、RAM3、ROM4は、バス6によって相互に接続されている。
ディスプレイ10は、演算処理装置1により生成されたグラフィックス情報を表示領域に表示させるユニットであって、液晶ディスプレイ、有機ELディスプレイなどで構成される。
記憶装置11は、例えば、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記録媒体で構成される。記憶装置11には、地図情報12などの情報が格納されている。
音声入出力装置13は、音声入力装置としてのマイクロフォン14と、音声出力装置としてのスピーカ15と、を備える。マイクロフォン14は、ユーザが発した声など、ナビゲーション装置100の外部音声を取得する。また、スピーカ15は、演算処理装置1で生成されたユーザへのメッセージを音声信号として出力する。
入力装置16は、ナビゲーション装置100がユーザからの指示を受け付けるユーザインターフェースである。具体的には、方向キー17、ダイヤルスイッチ18、タッチパネル19、その他のハードスイッチ(図示しない)である縮尺変更キーなどで構成される。
ROM装置20は、CD−ROMやDVD−ROMなどのROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記録媒体で構成されている。この記録媒体には、例えば、動画情報や、音声情報などが格納されている。
車速センサ21、ジャイロセンサ22、GPS受信装置23は、ナビゲーション装置100が搭載されている車両の自車位置などを検出するために使用される。
車速センサ21は、車速の算出に用いられる情報を出力する。具体的には、車速センサ21は、検出した車輪の回転数をパルス信号に変換し、所定の時間内におけるパルス信号数といった所定の車速情報を出力する。
ジャイロセンサ22は、光ファイバジャイロや振動ジャイロなどで構成され、移動体の回転による角速度を検出し、所定の角速度情報を生成、出力する。
GPS受信装置23は、GPS衛星からの信号を受信して、車両とGPS衛星間の距離と、距離の変化率を3個以上の衛星に対して測定することで、車両の現在地、進行速度および進行方位を測定する。
FM多重放送受信装置24は、VICS(Vehicle Information Communication System:格納商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などや、FM多重一般情報としてラジオ局が提供する文字情報などFM放送局から送信されてくるFM多重放送信号を受信する。
ビーコン受信装置25は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。ビーコン受信装置25は、例えば、光により通信する光ビーコン、電波により通信する電波ビーコンなどによって構成される。
以上、本実施形態に係るナビゲーション装置100のハードウェア構成について説明した。
次に、ナビゲーション装置100の機能ブロックについて説明する。なお、ナビゲーション装置100の機能ブロックは、演算処理装置1に実装されるCPU2が読み込んだ所定のプログラムを実行することにより構築される。そのため、ROM4には、各機能部の処理を実行するためのプログラムが記憶されている。
また、ナビゲーション装置100の機能ブロックは、本実施形態において実現されるナビゲーション装置100の機能を理解容易にするために、主な処理内容に応じて分類したものである。また、各機能の分類の仕方やその名称によって、本発明が制限されることはない。なお、ナビゲーション装置100の各構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、一つの構成要素がさらに多くの処理を実行するように分類することもできる。
また、ナビゲーション装置100の機能部は、ハードウェア(ASICなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
図2は、ナビゲーション装置100の機能ブロックを示した図である。ナビゲーション装置100は、全体制御部201と、自車状態検知部202と、境界検知部203と、誤差補正部204と、出庫判定部205と、マップマッチング処理部206と、案内部207と、を有している。
全体制御部201は、ナビゲーション装置100の様々な処理を行う中心的な機能部である。具体的には、全体制御部201は、他の機能部、ナビゲーション装置100が内蔵する他の装置、センサ、並びに、外部装置から様々な情報や指示を受け付ける。また、全体制御部201は、取得した情報や受け付けた指示を、これらの情報や指示の種類または内容に応じて、所定のセンサ、装置、機能部に出力する。
自車状態検知部202は、車両センサ情報を用いて自車位置や車両方位などの情報を含む自車の状態情報を算出する機能部である。具体的には、自車状態検知部202は、GPS受信装置23、車速センサ21およびジャイロセンサ22などから取得した情報を用いて、自車位置、車両方位、周辺リンクとの方位誤差および位置誤差を算出する。なお、自車状態検知部202は、車両が所定距離(例えば、20m)走行するごとにこれらの状態情報を算出する。また、自車状態検知部202は、算出した状態情報をRAM3に一時的に格納する。また、自車状態検知部202は、地図情報12、GPS受信装置23による信号の受信状況、位置誤差および方位誤差に基づき立体駐車場への入庫を検知する。
図3は、ナビゲーション装置100で検知された自車位置に基づく車両の移動軌跡(走行軌跡)の一例を示した図である。図3(a)および(b)は各々、立体駐車場303の位置や退出方向が異なる場合の走行軌跡の一例を示したものである。車両が立体駐車場303に入庫すると、GPS受信装置23がGPS衛星からの信号を受信できなくなるため、自車状態検知部202は、車速センサ21およびジャイロセンサ22から出力される情報などを用いて自立航法により自車位置および車両方位を算出する。このとき、車両は立体駐車場内303を傾斜旋回走行するため、自車状態検知部202により算出される車両方位には比較的大きな誤差が生じる。このような状態で車両が走行を続けると、方位誤差による位置誤差が蓄積される。そのため、ナビゲーション装置100は、正しい走行軌跡301とは違う誤差の大きい走行軌跡302を求めてしまう。
このような比較的大きな位置誤差および方位誤差がある状態では精度良く出庫を検知することができない。特に、都心部のマルチパス地帯などのように、出庫後もGPS受信装置23により信号を受信し難い場所では、位置誤差および方位誤差の補正が実施されず、出庫判定を誤る場合が生じる。本実施形態に係る境界検知装置は、このような出庫判定の精度を改善し、迅速かつ精度良く立体駐車場からの出庫を検知することができる。
境界検知部203は、例えば、道路と立体駐車場との境界などの境界を検知する機能部である。具体的には、境界検知部203は、自車状態検知部202により算出された位置誤差および方位誤差を用いて境界検知を行う。
誤差補正部204は、立体駐車場内の傾斜旋回走行により大きくなった方位誤差および位置誤差を補正する機能部である。具体的には、誤差補正部204は、境界検知部203により道路と立体駐車場との境界が検知されると、所定の値(例えば、10〜40度)を用いて方位誤差を補正する。また、誤差補正部204は、境界が検知されると、位置誤差を補正する地点を求め、求めた位置に自車位置を変更する。
出庫判定部205は、出庫判定を行う機能部である。具体的には、出庫判定部205は、GPS受信装置23による信号の受信状況、補正後の位置誤差、方位誤差および付近リンクの勾配や高度に関する情報などの情報を用いて出庫を検知する。また、出庫判定部205は、出庫を検知するとマッチ状態のモードを設定する。また、出庫判定部205は、入庫を検知した場合および入庫後に立体駐車場から退出していないと判定した場合にフリー状態のモードを設定する。なお、マッチ状態とは、例えば、自車位置が道路上にあり、マップマッチング処理や音声案内の実行を許可するモードのパラメータである。また、フリー状態とは、例えば、駐車場など道路以外の場所に自車位置があり、マップマッチング処理や音声案内などの実行を許可しないモードのパラメータである。なお、フリー状態のモードは、入庫を検知した自車状態検知部202により設定される。
マップマッチング処理部206は、自車位置、位置誤差および方位誤差などの所定情報を用いて、ディスプレイ10に表示される地図上の道路(リンク)に自車位置を合わせ込むマップマッチング処理を行う機能部である。
案内部207は、スピーカ15を介して音声案内を行う機能部である。具体的には、案内部207は、モードのパラメータがマッチ状態である場合、スピーカ15を介して経路誘導などの音声案内を行う。なお、モードのパラメータがフリー状態である場合、案内部207は、音声案内を行わない。
以上、本実施形態に係るナビゲーション装置100の機能ブロックについて説明した。
<動作の説明>
次に、本実施形態に係るナビゲーション装置100で実施される境界検知処理について説明する。図4は、境界検知処理の流れを示したフロー図である。かかる処理は、立体駐車場への入庫が検知されると開始される。なお、入庫が検知されたことにより、フリー状態のモードが設定されている。
次に、本実施形態に係るナビゲーション装置100で実施される境界検知処理について説明する。図4は、境界検知処理の流れを示したフロー図である。かかる処理は、立体駐車場への入庫が検知されると開始される。なお、入庫が検知されたことにより、フリー状態のモードが設定されている。
境界検知処理が開始されると、境界検知部203は、規定回数分の方位誤差の分散を算出する(ステップS001)。具体的には、境界検知部203は、自車状態検知部202により方位誤差が算出されるたびに、規定回数分(例えば、最新の方位誤差を含む5個分)の方位誤差を取得し、その分散を算出する。すなわち、境界検知部203は、自車状態検知部202により新たな方位誤差が算出されると、その都度、最新の方位誤差と過去に連続的に算出された所定数(例えば、4個)の方位誤差とを用いて、これらの分散を算出する。
次に、境界検知部203は、算出した方位誤差の分散が所定の閾値以上であるか否かを判定する(ステップS002)。具体的には、境界検知部203は、自車状態検知部202により算出された自車位置に最も近いリンクに対して、ステップS001で算出した方位誤差の分散が所定の閾値以上であるか否かを判定する。なお、所定の閾値は予め記憶装置11やROMなどに格納されているものとする。また、境界検知部203は、自車位置から引いた垂線距離に基づき、自車位置に最も近いリンクを特定する。
方位誤差が所定の閾値以上である場合(ステップS002でYes)、境界検知部203は、処理をステップS003に移行する。一方で、方位誤差がかかる閾値よりも小さい場合(ステップS002でNo)、境界検知部203は、処理をステップS001に戻す。
次に、境界検知部203は、境界検知判定区間を設定する(ステップS003)。図5は、境界検知判定区間の一例を示した図である。境界検知部203は、直近リンク353に対する方位誤差の分散が所定の閾値以上となった規定回数分(5個分)の区間を中間区間として設定する。また、境界検知部203は、中間区間の前後で算出された方位誤差の規定回数分(5個分)の区間を各々、前半区間および後半区間に設定する。なお、各地点351は、自車状態検知部202による方位誤差および位置誤差の算出地点を示している。また、曲線352は、車両の走行軌跡を示している。
次に、境界検知部203は、後半区間における方位誤差の分散が所定の閾値内となったか否かを判定する(ステップS004)。そして、所定の閾値内である場合(ステップS004でYes)、境界検知部203は、処理をステップS005に移行する。一方で、所定の閾値内でない場合(ステップS004でNo)、境界検知部203は、処理をステップS001に戻す。
このようなステップS002〜ステップS004の処理により、直近リンクに対する車両の方位誤差が閾値を超えて大きくなった後に、方位誤差が一定の範囲内に収まったか否かが判定される。すなわち、駐車場から退出する時に見られる特徴的な走行軌跡を検知したか否かが境界検知部により判定される。
次に、境界検知部203は、各区間(前半区間、中間区間および後半区間)における位置誤差の平均を算出する(ステップS005)。具体的には、境界検知部203は、自車状態検知部202により算出された直近リンクに対する位置誤差を各区間ごとに規定回数分(例えば、5個分)取得し、これらの平均を算出する。
次に、境界検知部203は、後半区間における位置誤差の平均が前半区間における位置誤差の平均よりも小さいか否かを判定する(ステップS006)。そして、前半区間の行ける位置誤差の平均よりも後半区間の位置誤差の平均が小さい場合(ステップS006でYes)、境界検知部203は、境界を検知し、本フローを終了する。
一方で、後半区間における位置誤差の平均が前半区間における位置誤差の平均よりも大きい場合(ステップS006でNo)、境界検知部203は、処理をステップS001に戻す。なお、境界検知部203は、後半区間における位置誤差の平均が所定の閾値内に収まっているか否かを判定するようにしても良い。
このようなステップS006の処理により、例えば、立体駐車場の敷地内を走行しているにも関わらず、誤って境界を検知してしまうことが防止される。図6は、立体駐車場の敷地内の走行軌跡の一例を示した図である。なお、図6(a)、(b)は各々、入庫方向や走行軌跡が異なる場合の例を示した図である。
図示するように、立体駐車場402の敷地内403の走行によっては、中間区間で方位誤差が所定の閾値よりも大きくなり、後半区間で方位誤差の分散が所定の閾値内となる場合がある。このような場合、境界検知部203は、境界を誤検知してしまう。そこで、境界検知部203は、直近リンク401に対する前半区間および後半区間の位置誤差の平均同士(AおよびB)を比較することにより、このような境界の誤検知を防止する。立体駐車場402の敷地内403を走行している場合、通常、前半区間の位置誤差の平均Aよりも後半区間の位置誤差の平均Bは大きくなるからである。
以上、境界検知処理について説明した。
次に、出庫判定処理について説明する。図7は、かかる処理を示したフロー図である。出庫判定処理は、境界検知処理で境界が検知された場合に開始される。
フリー状態判定処理が開始されると、誤差補正部204は、方位誤差および位置誤差を補正する(ステップS011)。図8は、位置誤差および方位誤差の補正を示した図である。まず、誤差補正部204は、直近リンク353のリンク方位に近づくように所定角度(例えば、20度)だけ方位誤差を補正する。図8(b)に示すように、例えば、リンク方位が0度であって方位誤差が30度である場合、誤差補正部204は、これを所定角度(θ=20度)だけリンク方位に近づける補正を行う。その結果、方位誤差は10度となる。
また、誤差補正部204は、位置誤差を補正する。具体的には、誤差補正部204は、中間区間において算出された自車位置のうち、直近リンク353に最も近い自車位置算出地点に自車位置を補正する。その結果、図8(a)に示すように、自車位置は501の地点となる。
このように、境界が検知された場合、誤差補正部204により、位置誤差および方位誤差が小さくなるように補正が行われる。言い換えれば、誤差補正部204は、位置誤差および方位誤差を用いて行う出庫判定処理において出庫が検知され易いように補正を行う。
次に、出庫判定部205は、補正後の方位誤差および位置誤差などを用いて、出庫判定基準値を算出する(ステップS013)。具体的には、出庫判定部205は、補正後の位置誤差、方位誤差、GPS受信装置23による信号の受信状況、リンクの勾配/高度情報などの所定情報を用いて、所定の演算式により出庫判定基準値を算出する。なお、位置誤差および方位誤差の他に用いる情報の種類および演算式は、適宜設定されれば良い。
次に、出庫判定部205は、出庫判定基準値が所定の閾値よりも小さいか否かを判定する(ステップS013)。そして、出庫判定基準値が所定の閾値よりも大きい場合(ステップS013でNo)、出庫判定部205は、フリー状態のモードを維持し(ステップS014)、本フローの処理を終了する。すなわち、出庫判定基準値が所定の閾値より小さくない場合は、未だ立体駐車場内またはその敷地内に自車位置があると考えられるため、出庫判定部205は、マップマッチング処理および音声案内を行わないフリー状態のモードを維持する。
一方で、出庫判定基準値が所定の閾値よりも小さい場合(ステップS013でYes)、出庫判定部205は、出庫と検知し(ステップS015)、マッチ状態のモードへ移行する(ステップS016)。
次に、マップマッチング処理部206および案内部207は、モードの設定がマッチ状態であるか否かを判定する(ステップS017)。そして、マッチ状態でない場合(ステップS017でNo)マップマッチング処理部206および案内部207は、本フローを終了する。一方で、マッチ状態である場合(ステップS017でYes)、マップマッチング処理部206および案内部207は、マップマッチング処理および音声案内を再開する(ステップS018)。
以上、出庫判定処理について説明した。
このような境界検知装置によれば、より迅速かつ精度良く立体駐車場からの出庫を判定することができる。特に、境界検知装置は、直近リンクに対する位置誤差および方位誤差から立体駐車場と道路との間の境界を検知し、境界が検知された場合に位置誤差および方位誤差を補正する。すなわち、境界が検知されると、出庫が検知され易いように位置誤差および方位誤差が補正される。その結果、境界検知装置によれば、位置誤差が蓄積されない早い段階で、精度良く立体駐車場からの出庫を検知することができる。
なお、前述の実施形態では、立体駐車場への入口および出口が共通の場合について説明したが、本発明はこれに限られるものではない。変形例に係る境界検知装置は、立体駐車場への入口および出口が異なる場合に適用される。図9は、立体駐車場への入口および出口が異なる場合の境界検知判定区間を示した図である。
変形例に係る境界検知装置の境界検知部203は、前述の境界検知処理において、各区間における位置誤差の平均を算出する際(ステップS005)、立体駐車場601の出入り口座標を特定する。なお、出入り口座標は、予め地図情報12に含まれているものとする。
境界検知部203は、入口座標と出口座標を特定すると、入口座標に最も近いリンク602を特定する。また、境界検知部203は、入庫を検知した地点の前後で規定回数分(例えば、入庫と判定した箇所の前後3個づつ計6個分)の自車位置算出地点を含む区間を入口区間として特定する。また、境界検知部203は、入口区間における位置誤差の平均を算出する。
また、境界検知部203は、出口座標に最も近いリンク603を特定する。また、境界検知部203は、特定した直近リンク603と自車位置とから後半区間における規定回数分(例えば、5個分)の位置誤差の平均を算出する。
そして、境界検知部203は、入口区間における位置誤差の平均と後半区間における位置誤差の平均とを比較し、後半区間における位置誤差の平均が前半区間における位置誤差の平均よりも小さい場合に境界を検知する(ステップS007)。なお、境界検知部203は、後半区間における位置誤差の平均が所定の閾値内に収まっているか否かを判定するようにしても良い。
このような変形例に係る境界検知装置によれば、出入り口が異なる立体駐車場の場合でも、立体駐車場と道路との間の境界を精度良く判定することができる。その結果、迅速かつ精度良く立体駐車場からの出庫を検知することができる。
また、前述の実施形態では、本発明を、いわゆるナビゲーション機能を備えるナビゲーション装置100に適用したが、ナビゲーション機能を備えないスマートフォン、ディスプレイカーオーディオその他の情報表示装置に適用しても良い。また、前述の実施形態では、本発明を、表示装置の例であるディスプレイ10を備えるナビゲーション装置100に提供したが、この代わりに、別体の表示装置に信号を出力する情報出力装置に適用しても良い。
なお、本発明は、上記の実施形態や変形例などに限られるものではなく、これら以外にも様々な実施形態および変形例が含まれる。例えば、上記の実施形態は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施形態の構成の一部を他の実施形態や変形例の構成に置き換えることが可能であり、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
また、上記の各構成、機能、処理部および処理手段などは、それらの一部または全部を、プロセッサが各々の機能を実現するプログラムにより実現しても良い。各機能を実現するプログラム、テーブル、ファイルなどの情報は、メモリや、ハードディスク、SSD(Solid State Drive)などの記憶装置、または、ICカード、SD(Secure Digital)メモリカード、DVD(Digital Versatile Disk)などの記録媒体に置くことができる。なお、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしも全ての制御線や情報線を示しているとは限らない。
100・・・ナビゲーション装置、1・・・演算処理装置、10・・・ディスプレイ、
11・・・記憶装置、12・・・地図情報、13・・・音声入出力装置、
14・・・マイクロフォン、15・・・スピーカ、16・・・入力装置、
17・・・方向キー、18・・・ダイヤルスイッチ、19・・・タッチパネル、
20・・・ROM装置、21・・・車速センサ、22・・・ジャイロセンサ、
23・・・GPS受信装置、24・・・FM多重放送受信装置、
25・・・ビーコン受信装置
11・・・記憶装置、12・・・地図情報、13・・・音声入出力装置、
14・・・マイクロフォン、15・・・スピーカ、16・・・入力装置、
17・・・方向キー、18・・・ダイヤルスイッチ、19・・・タッチパネル、
20・・・ROM装置、21・・・車速センサ、22・・・ジャイロセンサ、
23・・・GPS受信装置、24・・・FM多重放送受信装置、
25・・・ビーコン受信装置
Claims (9)
- 周辺リンクに対する位置誤差および方位誤差を算出する自車状態検知部と、
前記自車状態検知部により算出された位置誤差および方位誤差を用いて、立体駐車場と道路との間の境界を検知する境界検知部と、
前記境界検知部により前記境界が検知された場合、位置誤差および方位誤差を補正する誤差補正部と、
前記誤差補正部による補正後の位置誤差および方位誤差を用いて出庫判定を行う出庫判定部と、を備える
ことを特徴とする境界検知装置。 - 請求項1に記載の境界検知装置であって、
前記境界検知部は、
前記自車状態検知部により算出された直近リンクに対する規定回数分の方位誤差の分散が所定の閾値以上である場合、該規定回数分の区間を中間区間として設定し、
前記中間区間の前後で算出された方位誤差の規定回数分の区間を各々、前半区間および後半区間として設定し、
前記後半区間における規定回数分の方位誤差の分散が所定の閾値よりも小さい場合、前記前半区間および前記後半区間の位置誤差の平均同士を比較し、
前記後半区間の位置誤差の平均が前記前半区間の位置誤差の平均よりも小さい場合、前記境界を検知する
ことを特徴とする境界検知装置。 - 請求項2に記載の境界検知装置であって、
前記誤差補正部は、
前記中間区間における自車位置算出地点のうち直近リンクに最も近い位置の自車位置算出地点を自車位置とすることにより位置誤差の補正を行う
ことを特徴とする境界検知装置。 - 請求項2に記載の境界検知装置であって、
前記誤差補正部は、
車両方位を前記直近リンクのリンク方位に所定角度近づけることにより方位誤差の補正を行う
ことを特徴とする境界検知装置。 - 請求項1に記載の境界検知装置であって、
前記出庫判定部は、
前記補正後の位置誤差および方位誤差を用いた出庫判定により出庫を検知すると、車両が道路上にあることを示すマッチ状態のモードを設定する
ことを特徴とする境界検知装置。 - 請求項5に記載の境界検知装置であって、
自車位置を地図上のリンクに合わせ込むマップマッチング処理を行うマップマッチング処理部と、
音声案内を行う案内部と、を備え、
前記マップマッチング処理部および前記案内部は、
マッチ状態のモードが設定されている場合、前記マップマッチング処理および前記音声案内処理を行う
ことを特徴とする境界検知装置。 - 請求項1に記載の境界検知装置であって、
前記境界検知部は、
前記立体駐車場への入口および前記立体駐車場からの出口の位置が異なる場合、
入庫が検知された地点の前後で規定回数分の自車位置算出地点を含む区間を入口区間として設定し、
入庫後に算出された規定回数分の方位誤差の分散が第一の閾値以上である場合、該規定回数分の区間を中間区間として設定し、
前記中間区間の前後で算出された方位誤差の規定回数分の区間を各々、前半区間および後半区間として設定し、
前記後半区間における規定回数分の方位誤差の分散が第二の閾値よりも小さい場合、前記入口区間における第一の直近リンクに対する位置誤差の平均と、前記後半区間における第二の直近リンクに対する位置誤差の平均とを比較し、
前記後半区間の位置誤差の平均が前記入口区間の位置誤差の平均よりも小さい場合、前記境界を検知する
ことを特徴とする境界検知装置。 - 車両に着脱可能なコンピュータにより地図上の境界を検知する境界検知方法であって、
前記コンピュータは、
前記車両位置の周辺リンクに対する位置誤差および方位誤差を算出する車両状態検知ステップと、
前記車両状態検知ステップにより算出された位置誤差および方位誤差を用いて、立体駐車場と道路との間の境界を検知する境界検知ステップと、
前記境界検知ステップにより前記境界が検知された場合、位置誤差および方位誤差を補正する誤差補正ステップと、
前記誤差補正ステップによる補正後の位置誤差および方位誤差を用いて出庫判定を行う出庫判定ステップと、を行う
ことを特徴とする境界検知方法。 - 車両に着脱可能なコンピュータを、地図上の境界を検知する境界検知装置として機能させるプログラムであって、
前記コンピュータを、
前記車両位置の周辺リンクに対する位置誤差および方位誤差を算出する車両状態検知部と、
前記車両状態検知部により算出された位置誤差および方位誤差を用いて、立体駐車場と道路との間の境界を検知する境界検知部と、
前記境界検知部により前記境界が検知された場合、位置誤差および方位誤差を補正する誤差補正部と、
前記誤差補正部による補正後の位置誤差および方位誤差を用いて出庫判定を行う出庫判定部として機能させる
ことを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013255890A JP2015114194A (ja) | 2013-12-11 | 2013-12-11 | 境界検知装置、境界検知方法およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013255890A JP2015114194A (ja) | 2013-12-11 | 2013-12-11 | 境界検知装置、境界検知方法およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015114194A true JP2015114194A (ja) | 2015-06-22 |
Family
ID=53528120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013255890A Pending JP2015114194A (ja) | 2013-12-11 | 2013-12-11 | 境界検知装置、境界検知方法およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015114194A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116610766A (zh) * | 2023-05-23 | 2023-08-18 | 蘑菇车联信息科技有限公司 | 地图更新方法、装置及电子设备、计算机可读存储介质 |
-
2013
- 2013-12-11 JP JP2013255890A patent/JP2015114194A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116610766A (zh) * | 2023-05-23 | 2023-08-18 | 蘑菇车联信息科技有限公司 | 地图更新方法、装置及电子设备、计算机可读存储介质 |
| CN116610766B (zh) * | 2023-05-23 | 2025-10-17 | 蘑菇车联信息科技有限公司 | 地图更新方法、装置及电子设备、计算机可读存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6885781B2 (ja) | 車両制御装置、車両制御方法および車両制御システム | |
| EP2650646B1 (en) | Moving body position detection system, moving body position detection method, and computer-readable storage medium | |
| US8880342B2 (en) | Moving body position detection system, moving body position detection apparatus, moving body position detection method, and computer-readable storage medium | |
| JP6143474B2 (ja) | 位置検出装置およびプログラム | |
| EP2691741B1 (en) | Driving support system, driving support method and computer program | |
| US10794709B2 (en) | Apparatus of compensating for a sensing value of a gyroscope sensor, a system having the same, and a method thereof | |
| JP5894865B2 (ja) | 車両位置検出装置、及びプログラム | |
| US8010280B2 (en) | Vehicle travel safety device | |
| US8903652B2 (en) | Navigation device positioning system | |
| CN104422449B (zh) | 一种车辆导航的方法、装置 | |
| JP5083264B2 (ja) | 交通情報配信システム | |
| JP6054638B2 (ja) | 車両位置検出装置およびプログラム | |
| JP5982190B2 (ja) | 車両位置検出装置および車両位置検出方法 | |
| JPH0735560A (ja) | ナビゲーション装置 | |
| JP5891120B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| JP2015114194A (ja) | 境界検知装置、境界検知方法およびプログラム | |
| JP2008298697A (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた自位置認識装置及びナビゲーション装置 | |
| JP5916540B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| JP5005515B2 (ja) | ナビゲーション装置とその誘導方法 | |
| WO2007083464A1 (ja) | ナビゲーション装置及び到着予想時刻算出方法 | |
| JP2008076123A (ja) | 車載用ナビゲーション装置及びその制御方法 | |
| JP2017156261A (ja) | 車両用位置推定装置 | |
| JP2013088236A (ja) | 情報端末、プログラムおよび運転支援方法 | |
| JPH0317686A (ja) | 車載ナビゲーション装置 |