JP2015114115A - 重量計および重量測定方法 - Google Patents
重量計および重量測定方法 Download PDFInfo
- Publication number
- JP2015114115A JP2015114115A JP2013254028A JP2013254028A JP2015114115A JP 2015114115 A JP2015114115 A JP 2015114115A JP 2013254028 A JP2013254028 A JP 2013254028A JP 2013254028 A JP2013254028 A JP 2013254028A JP 2015114115 A JP2015114115 A JP 2015114115A
- Authority
- JP
- Japan
- Prior art keywords
- weight
- scale
- weighing scale
- main body
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
【課題】底面に重量がかかっている状態であっても正確に測定対象の重量を測定することができる重量計および重量測定方法を提供する。【解決手段】本体と、荷重に応じた重量を測定する第1重量測定部と、本体の底面にかかる重量を測定する第2重量測定部と、第2重量測定部による測定結果を用いて、第1重量測定部による測定結果を補正する補正処理部とを備える重量計である。【選択図】図8
Description
本発明は、重量計および重量測定方法に関する。
重量計におけるエラー状態のひとつに、「ボトミング」と呼ばれる状態がある。ボトミングは、荷重による負荷が加えられた場合に、重量計の本体の底面が床面などと接触する現象である。この現象は、例えば、重量計の一種である体重計の場合には、絨毯や畳などの柔軟な床面、又は平らでない床面に重量計を設置して体重を測定したときに発生しやすい。このボトミングが発生すると、重量計の底面に床からの反力が生じて重量計の底面に重量がかかるので、測定対象の重量は実際の重量よりも少なく測定されてしまう。そこで、このボトミングに対処するための技術として、重量計の底面と床面などとの距離を測定することによりボトミングの発生を検出する重量計が提案させている(特許文献1)。
しかし、特許文献1に記載の発明は、ボトミングの発生を検出するものであり、ボトミングが発生している場合における重量計の測定結果をどうするかという未解決の問題がある。
本発明はこのような問題点に鑑みなされたものであり、ボトミングが発生している状態であっても、正確に測定対象の重量を測定することができる重量計および重量測定方法を提供することを目的とする。
上述した課題を解決するために、本発明は、本体と、荷重に応じた重量を測定する第1重量測定部と、本体の底面にかかる重量を測定する第2重量測定部と、第2重量測定部による測定結果を用いて、第1重量測定部による測定結果を補正する補正処理部とを備える重量計である。
また、本発明は、荷重に応じた重量を測定し、本体の底面にかかる重量を測定し、本体の底面にかかる重量の測定結果を用いて、荷重に応じた重量の測定結果を補正する重量測定方法である。
本発明によれば、ボトミングが発生している状態、すなわち、重量計の底面に重量がかかっている状態であっても、正確に測定対象の重量を測定することができる。なお、ここに記載された効果は必ずしも限定されるものではなく、明細書中に記載されたいずれかの効果であってもよい。
以下、本発明の実施の形態について図面を参照しながら説明する。ただし、本発明は以下の実施例のみに限定されるものではない。なお、説明は以下の順序で行う。
<1.ボトミングについて>
<2.第1の実施の形態>
<3.第2の実施の形態>
<4.第3の実施の形態>
<5.変形例>
<1.ボトミングについて>
<2.第1の実施の形態>
<3.第2の実施の形態>
<4.第3の実施の形態>
<5.変形例>
<1.ボトミングについて>
まず、本発明の説明の前に、重量計の使用におけるボトミングの発生について説明する。ボトミングが発生すると重量計の底面に重量がかかり、測定対象の重量が実際の重量よりも少なく測定されてしまう。すなわち、重量の正確な測定が不可能となる。
まず、本発明の説明の前に、重量計の使用におけるボトミングの発生について説明する。ボトミングが発生すると重量計の底面に重量がかかり、測定対象の重量が実際の重量よりも少なく測定されてしまう。すなわち、重量の正確な測定が不可能となる。
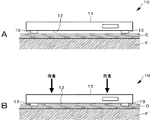
図1乃至図4を参照して、ボトミングの具体例について説明する。図1乃至図4は、重量計の正面図である。なお、図1乃至図4における重量計10は、いずれも重量計本体11を複数の脚部13が支持する構成になっている。重量計10は、例えば、被測定者が上から乗ることにより体重を測定することが可能な体重計である。
図1は、重量計10が毛足が長い絨毯Cの上に設置されている例である。なお、絨毯Cは、床面F上に敷かれているものである。この例では、図1Aに示されるように、荷重による負荷がない場合には、重量計10の脚部13は絨毯Cの毛の上に載っており、重量計10の底面12は絨毯Cに接触していない。しかし、図1Bに示されるように、重量計10の所定の位置に荷重による負荷が加えられると、重量計10の脚部13が絨毯Cの毛足に沈み込み、重量計10の底面12と絨毯Cの毛足が接触し、ボトミングが発生する場合がある。
図2は、重量計10が畳Tの上に設置されている例である。この例では、図2Aに示されるように、重量計10に荷重による負荷がない場合には、重量計10の底面12は畳Tに接触してない。しかし、図2Bに示されるように、重量計10の所定位置に荷重による負荷が加えられると、畳Tにおける重量計10の脚部13が接地する部分が変形して窪んで、重量計10が沈み、畳Tの窪んだ部分以外の部分が盛り上がることになる。その結果、重量計10の底面12と畳Tの盛り上がった部分とが接触してボトミングが発生する。なお、畳Tの他にも、毛足が短いカーペットでも同様の現象が発生する場合がある。
図3は、重量計10が平坦でなく凹凸がある硬い床面Fに設置されている例である。図3Aに示されるように、重量計10は脚部13を備えていることにより、荷重による負荷がない場合には、底面12は床面Fと接触していない。しかし、図3Bに示されるように、重量計10の所定位置に荷重による負荷が加えられると、重量計本体11が撓んで、底面21と床面Fの凸部とが接触してボトミングが発生する場合がある。
重量計10では、平坦で硬い床面Fに重量計10が設置された状態で負荷が加えられて重量計本体11の底面12が撓んでも、その撓みにより、底面12と床面Fとが接触しないように設計されている。しかしながら、床面Fに凹凸がある場合には、床面Fの凸部において、底面12と床面Fとの距離が設計時の想定よりも短くなるため、ボトミングが生じやすくなる。
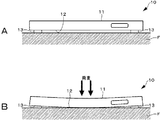
図4は、重量計10が平坦で硬い床面Fに設置されている例である。図4Aに示されるように、荷重による負荷がない場合には、重量計10の底面12は絨毯Cに接触していない。しかし、図4Bに示されるように、荷重による大きな負荷が重量計10の中央付近に加えられると、重量計本体11が撓んで、底面21と床面Fとが接触してボトミングが発生する場合がある。重量計10は、平坦で硬い床面Fに重量計10を設置して荷重が所定位置に負荷された場合に、重量計本体11の撓み量を勘案して、床面Fに接触しないように設計がなされる。しかし、被測定者が足を中央付近に配置して乗った場合など、所定位置とは異なる位置に荷重が集中した場合にボトミングが生じてしまうことがある。
<1.第1の実施の形態>
次に、本発明の第1の実施の形態について説明する。図5Aは、本発明の第1の実施の形態に係る重量計100の平面図であり、図5Bは、重量計100の正面図である。図6は、重量計100の機能的構成を示すブロック図である。図7Aは、重量計100の底面図である。図7Bは、重量計100に荷重による負荷がかかっていない状態を示す正面図であり、図7Cは、荷重による負荷により重量計100が撓んでいる状態を示す正面図である。
次に、本発明の第1の実施の形態について説明する。図5Aは、本発明の第1の実施の形態に係る重量計100の平面図であり、図5Bは、重量計100の正面図である。図6は、重量計100の機能的構成を示すブロック図である。図7Aは、重量計100の底面図である。図7Bは、重量計100に荷重による負荷がかかっていない状態を示す正面図であり、図7Cは、荷重による負荷により重量計100が撓んでいる状態を示す正面図である。
重量計100は、例えば、被測定者が上から乗ることにより体重を測定することが可能な体重計である。なお、下記の第1乃至第3の実施の形態の説明は、重量計が平坦で硬い床面Fの上に載置されており、中央付近に荷重による負荷が加えられた場合を想定して行う。ただし、重量計は絨毯、畳、凹凸がある硬い床面などの面の上でも使用可能であり、それらの上に重量計を設置し、所定位置に荷重による負荷がかかった場合でも同様の効果を奏することができる。
図5Aおよび図5Bに示されるように、重量計100は、上面部102、側面部103および底面部104とから平面視略正方形状に構成された重量計本体101と、四隅において重量計本体101を下から支持する4本の脚部105とを備える。また、重量計100は、底面部104に補正用重量センサ107を備える。なお、重量計本体101の構造についての詳細な説明は省略するが、公知となっている種々の重量計の構造を採用することが可能である。
重量計100は、重量センサ106、補正用重量センサ107、A/D(Analog/Digital)変換部108、CPU(Central Processing Unit)109、RAM(Random Access Memory)110、ROM(Read Only Memory)111、記憶部112、表示部113および電源キー114を備える。
重量センサ106は、上から重量計100にかかる測定対象の重量を測定するものである。重量センサ106は、重量に相当するアナログの電気信号をA/D変換部108に出力する。図5Aにおいて破線で示されるように、重量センサ106は重量計100の内部において、脚部105に対応する位置である重量計100の四隅のそれぞれに設けられている。重量センサ106は、例えば、起歪体と歪ゲージとを有し、荷重による負荷が重量計100にかかったときの荷重に応じて歪む起歪体の歪量を、歪ゲージの抵抗値の変化により測定する。なお、重量センサ106の数はあくまで例示であり、その数は4つに限られるものではない。重量センサ106は、特許請求の範囲における第1重量測定部に相当するものである。
補正用重量センサ107は、重量計100の底面部104側(脚部を除く)が床面Fに接した際に底面部104側(脚部を除く)にかかる重量を測定するものである。補正用重量センサ107は、重量計100の底面部104において外部に露出するように設けられている。補正用重量センサ107の測定値は、重量センサ106の測定値の補正に用いられる。補正用重量センサ107は、底面部104側(脚部を除く)にかかる重量に相当するアナログの電気信号をA/D変換部108に出力する。補正用重量センサ107は、特許請求の範囲における第2重量測定部に相当するものである。
第1の実施の形態において、補正用重量センサ107は、広範囲において重量を検出/測定することができるシート状の面圧センサを用いて構成されている。第1の実施の形態においては、補正用重量センサ107として面圧センサを用いることにより、図7Aに示されるように、重量計本体101の底面部104の略全面(斜線部分)において重量の測定が可能となっている。重量計本体101の底面部104の略全面において重量の測定が可能なことにより、重量計本体101の底面部104側(脚部を除く)のどの位置が床面Fに接しても底面部104側(脚部を除く)にかかる重量を測定することが可能である。よって、重量計100がどのように撓んでも底面部104側(脚部を除く)にかかる重量を測定することができる。
なお、補正用重量センサ107の測定方式は、重量計本体101の底面で広範囲において測定が可能なものであればどのようなものを採用してもよい。
A/D変換部108は、重量センサ106および補正用重量センサ107が出力するアナログの信号をデジタルの信号に変換してCPU109に供給するものである。
重量計100は、内部に設けられた制御回路基板(図示せず。)上にCPU109、RAM110、ROM111および記憶部112を備える。CPU109は、RAM110をワークメモリとしてROM111に記憶されたプログラムを実行することにより重量計100の全体および各部の制御、さらに本発明に係る処理を行うものである。ROM111は不揮発性メモリであり、CPU109により読み込まれ動作されるプログラムなどが記憶される。RAM110は、CPU109のワークメモリとして用いられる。記憶部112は、被測定者の体重の測定履歴、被測定者の身長、年齢などの各種データなどを記憶保持する。なお、被測定者は1人に限られず、記憶部112は、複数の被測定者の体重、身長、年齢などをユーザ―データとして記憶保持する事が可能である。
CPU109は、補正用重量センサ107の測定値を用いて重量センサ106の測定値を補正する処理を行う。図7Cに示されるように、重量計100の底面部104側(脚部を除く)が床面Fに接触し、底面部104側(脚部を除く)に重量がかかると、重量センサ106の測定値は実際の測定対象の重量より減少することになる。よって、測定対象の正確な重量を得るために、CPU109は、下記の式(1)を用いて重量センサ106の測定値の補正処理を行う。なお、式(1)において、Wは重量センサ106の測定値の補正後の値であり、w1は重量センサ106の測定値である。また、w2は補正用重量センサ107の測定値であり、aは、補正用重量センサ107の出力感度を重量センサ106の出力感度に整合させるための係数である。
[数1]
W=w1+a・w2・・・・・(1)
W=w1+a・w2・・・・・(1)
このように、CPU109は特許請求の範囲における補正処理部に相当するものである。なお、このCPU109により行われる処理は、プログラムによって実現されるのみでなく、同様の処理機能を有するハードウェアによる専用の装置、回路などを組み合わせて実現されてもよい。
表示部113は、例えば、LCD(Liquid Crystal Display)、PDP(Plasma Display Panel)、有機EL(Electro Luminescence)パネルなどにより構成された表示手段である。表示部113は、重量計本体101の上面部102に設けられており、CPU109の制御のもと、測定結果やエラーメッセージなどの各種情報を表示する。
電源キー114は、重量計100の電源をオン/オフを切り替えるための入力手段である。なお、重量計本体101上に荷重による負荷がかかると自動で重量計100の電源がオンとなり、一定期間経過後自動で電源がオフとなるように構成してもよい。
以上のようにして、第1の実施の形態に係る重量計100が構成されている。
次に、図8を参照して、重量計100において行われる重量測定処理について説明する。図8は、重量計100により行われる処理の流れを示すフローチャートである。
図8に示す動作は、重量計100の電源がオンになることにより開始される。電源がオンになると、重量計100は重量を計測可能な状態になる。まず、表示部113における表示が開始される。このとき、表示部113には、例えば、「0.00kg」と表示される。
次に、ステップS11において、重量センサ106により測定対象(例えば、人)の重量が測定される。測定においては、重量センサ106からA/D変換部108を介して供給されたデジタルの信号によって測定結果がCPU109に供給される。次にステップS12で、CPU109により、重量センサ106による測定結果が安定したか否かが判定される。
ステップS12で、重量センサ106の測定結果が安定していると判定された場合、処理はステップS13に進む(ステップS12のYes)。次にステップS13で、補正用重量センサ107からA/D変換部108を介して供給されたデジタルの信号で示される補正用重量センサ107の測定値が0であるか否かが判定される。
補正用重量センサ107による測定値が0である場合、処理はステップS14に進む(ステップS13のYes)。次にステップS14で、CPU109の制御により表示部113に重量センサ106の測定値が測定対象の重量として表示される。そして、重量の測定は終了となる。
補正用重量センサ107の測定値が0であるということは、重量計100の底面部104側(脚部を除く)は床面Fに接触していないということであるため、重量センサ106の測定値に床面Fからの反力による変動はない。よって、重量センサ106の測定結果をそのまま測定対象の重量として表示することができる。
一方、補正用重量センサ107による測定値が0ではない場合、処理はステップS15に進む(ステップS13のNo)。補正用重量センサ107の測定値が0ではないということは、重量計100の底面部104側(脚部を除く)が床面Fに接触していることにより、底面部104側(脚部を除く)に重量がかかっているということである。
次にステップS15で、CPU109により、重量センサ106の測定値の補正処理が行われる。補正処理は、CPU109の説明において上述したものである。重量センサ106の測定値の補正後の値は、RAM110または記憶部112に保存される。
次にステップS16で、CPU109の制御によりRAM110または記憶部112に一旦記憶された重量情報が読み出され、重量センサ106の測定値の補正後の値が測定対象の重量として表示部113に表示される。そして、重量の測定は終了となる。
説明はステップS12に戻る。ステップS12で、重量センサ106の測定値が安定していないと判定された場合、処理はステップS17に進む(ステップS12のNo)。重量センサ106の測定値が安定していない場合には、正確な測定値を得ることができないため、ステップS17で、CPU109の制御により、表示部113にエラーを示す旨の表示がなされる。エラー表示としては例えば、「ERROR」という文字列を表示することが考えられる。
なお、重量計100に音声を出力するスピーカーを設けて、表示部113における表示に代えてまたは併せて、「測定エラーです。再測定してください」のような音声ガイダンス、ビーブ音でエラー通知を行ってもよい。また、表示部113にエラーを示す文字列を表示せず、LED(Light Emitting Diode)などの点灯装置(図示略)を設けて、その点灯によりエラーが発生したことを通知するようにしてもよい。
以上のようにして、本発明の第1の実施の形態における重量の測定が行われる。第1の実施の形態によれば、重量計100の底面部104側(脚部を除く)にかかる重量を測定する補正用重量センサ107の測定値を用いて重量センサ106の測定値を補正することにより、ボトミングが生じた場合でも正確な重量の測定を行うことができる。
また、補正用重量センサ107は、重量計100の底面部104側(脚部を除く)のどの位置が床面Fに接触しても重量計100の底面部104側(脚部を除く)にかかる重量を測定することができるため、重量計100の底面部104側(脚部を除く)のどの位置が床面Fに接しても、正確な重量の測定を行うことができる。
<3.第2の実施の形態>
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同様の構成については同一の符号を援用し、その説明を省略する。
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同様の構成については同一の符号を援用し、その説明を省略する。
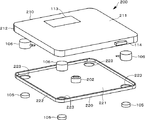
第2の実施の形態における重量計200を構成する重量計本体201は、上側カバー部210と下側カバー部220とを組み合わせることにより構成されている。図9は、上側カバー部210と下側カバー部220の構成を示す分解斜視図である。図10Aは重量計200の平面図であり、図10Bは重量計200の正面図である。
上側カバー部210は、平面視略長方形状の上面部211と、その上面部211の全周の縁から下方に向かって延出する側面部212とにより、下方が開口した略箱状に構成されている。
下側カバー部220は、平面視略長方形状の底面部221と、その底面部221の全周の縁から上方に向かって延出する側面部222とにより、上方が開口した略箱状に構成されている。下側カバー部220の底面部221は可撓性を有するように構成されている。
下側カバー部220の四隅にはそれぞれ、脚部105が挿通するための脚挿通穴223が形成されている。各脚部105は、脚挿通穴223を通り、重量計本体201内部において各重量センサ106のそれぞれに固定されている。なお、下側カバー部220と脚部105とが接触しないように、脚挿通穴223の直径は、脚部105の直径よりもわずかに大きく構成されている。
上側カバー部210の上面部211は、下側カバー部220の底面部221よりわずかに大きく構成されている。上側カバー部210の内部に下側カバー部220を配置し、上側カバー部210の側面部212と下側カバー部220の側面部222とを固定することにより、重量計本体201が構成されている。上側カバー部210の側面部212と下側カバー部220の側面部222とを固定する方法としては、ねじによる固定、ボルト・ナットによる固定、接着による固定、爪状部材同士の嵌合による固定などがある。ただし、上側カバー部210と下側カバー部220とを固定することができれば固定方法はどのような方法であってもよい。重量センサ106は上側カバー部210と下側カバー部220との間に設けられている。
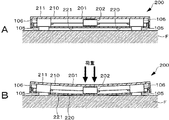
図11Aは、重量計200に荷重による負荷がかかっていない状態を示す、図10AにおけるXI−XI断面図である。図11Bは、荷重による負荷で重量計200が撓んでいる状態を示す、図10AにおけるXI−XI断面図である。
図11Aに示されるように、重量センサ106は、上端が上側カバー部210に固定され、下端が脚部105に固定されている。さらに、上側カバー部210と下側カバー部220とに挟まれるように補正用重量センサ202が設けられている。本実施の形態においては、補正用重量センサ202は、重量計本体201の略中央に設けられている。
このように重量計200を構成することにより、図11Bに示されるように、ボトミングにより重量計200の底面部221が床面Fと接触すると、床面Fからの反力により、可撓性を有する下側カバー部220の底面部221が上方向に変形して補正用重量センサ202を上方向に押圧することになる。これにより、補正用重量センサ202で底面部221にかかる重量を測定することが可能となる。
重量計本体201の底面、すなわち下側カバー部220の底面部221のどの位置が床面Fに接触しても下側カバー部220の底面部221は上方向に変形することになる。よって、ボトミングにより重量計本体201の底面のどの位置が床面Fに接触しても、重量計200の底面部221にかかる重量を測定することが可能である。
重量計200の機能的構成は図6を参照して説明した第1の実施の形態におけるものと同様である。重量計200により行われる重量測定処理は、図8を参照して説明した第1の実施の形態におけるものと同様である。重量計200の底面部221が床面Fと接触した場合、CPU109は補正用重量センサ202による測定値を用いて重量センサ106による測定値を補正して、補正後の値を正確な重量として表示部113に表示させる。CPU109による重量の補正処理も第1の実施の形態に係るものと同様である。
本発明の第2の実施の形態によれば、下側カバー部220で補正用重量センサ202が押圧されることにより、重量計200の底面部221のどの場所が床面Fに接しても、重量計200の底面部221にかかる重量を測定することが可能である。これにより、重量計200の底面部221のどの場所が床面Fに接しても、重量センサ106による測定値を補正して、測定対象の正確な重量を得ることができる。
<4.第3の実施の形態>
次に、本発明の第3の実施の形態について説明する。なお、第1の実施の形態と同様の構成については同一の符号を援用し、その説明を省略する。
次に、本発明の第3の実施の形態について説明する。なお、第1の実施の形態と同様の構成については同一の符号を援用し、その説明を省略する。
図12Aは、第3の実施の形態における重量計300の構成を示す底面図である。図12Bは、荷重による負荷がかかってない状態を示す重量計300の正面図であり、図12Cは、荷重による負荷で重量計300が撓んでいる状態を示す正面図である。なお、重量計300の上面の構成は図5Aに示される第1の実施の形態におけるものと同様である。
重量計300を構成する重量計本体101は、上面部102、側面部103、底面部104とから箱状に構成されており、第1の実施の形態におけるものと同様のものである。また、重量センサ106は第1の実施の形態と同様に脚部105に対応する位置である重量計300の四隅のそれぞれに設けられている。
第3の実施の形態においては、図12Aの破線で示されるように、補正用重量センサ301は、底面部104の4つの脚部105の略中心の位置(各脚部105から等距離の位置)において外部に露出するように設けられている。
重量計本体101は、4本の脚部105により支持されている。したがって、重量計本体101は、4つの脚部105の中心位置(各脚部105から等距離の位置)において最も撓みやすいといえる。すなわち、重量計本体101の底面部104側(脚部を除く)は、その中心位置において床面Fと接触する可能性が最も高いといえる。そこで、第3の実施形態では、重量計本体101の底面部104側(脚部を除く)の最も床面Fと接触する可能性が高い位置である、4つの脚部105の中心位置に補正用重量センサ301が設けられている。これにより、底面部104側(脚部を除く)と床面Fとが接触した際に、底面部104側(脚部を除く)にかかる重量を測定することができる。
なお、重量計300の機能的構成は図6を参照して説明した第1の実施の形態におけるものと同様である。また、重量計300により行われる重量測定処理は、図8を参照して説明した第1の実施の形態におけるものと同様である。重量計300の底面部104側(脚部を除く)が床面Fと接触した場合、CPU109は補正用重量センサ301による測定値を用いて重量センサ106による測定値を補正して、補正後の値を正確な重量として表示部113に表示させる。CPU109による重量の補正処理は、第1の実施の形態におけるものと同様である。
第3の実施の形態によれば、重量計100の底面部104側(脚部を除く)の4つの脚部105の中心位置が床面Fと接触して、重量計の底面に重量がかかった場合であっても、重量センサ106の値を補正して測定対象の正確な重量を得ることができる。また、補正用重量センサ301を、重量計本体101を支持する複数の脚部105の中心位置に設けることにより、重量計300の部品点数を少なくし、コスト削減、製造工程の簡略化、さらに重量計300の軽量化などを図ることができる。
本発明の第1乃至第3の実施の形態のいずれにおいても、重量計の底面と床面とが接触しないように脚部を長くするなどして底面と床面との距離を広げる必要がないため、重量計の薄型化を図ることができる。
なお、上述した第1乃至第3の実施の形態における説明は、重量計が平坦で硬い床面Fの上に載置されており、中央付近に荷重による負荷が加わる場合を想定して行った。ただし、重量計が絨毯、畳、凹凸がある硬い床面などの面の上に載置され、中央付近以外の所定位置に荷重を負荷された場合でも実施の形態における説明と同様に測定値の補正を行うことが可能である。
<5.変形例>
以上、本発明の実施の形態について具体的に説明したが、本発明は上述の実施の形態に限定されるものではなく、本発明の技術的思想に基づく各種の変形が可能である。
以上、本発明の実施の形態について具体的に説明したが、本発明は上述の実施の形態に限定されるものではなく、本発明の技術的思想に基づく各種の変形が可能である。
重量計100の形状は、図1などに示される四角形状に限られず、その他の形状、例えば円形状であってもよい。また、上述した実施形態では、脚部105の形状は円柱であるが、脚部105の形状はこれに限られず、例えば、平たい細長の脚部105が2本設けられてもよい。よって、脚部105の本数も4本に限られず、任意の本数でよい。
本発明は、人の体重を計測する体重計の他に、動物用体重計、工業用はかり、料理用はかりなどのはかりや、体重計付の体脂肪計、体重計付の体組織計などのはかりの測定機能を用いた生体測定装置にも適用することが可能である。
また、重量に加えて、測定対象である人の体脂肪率、筋肉量などを測定可能な体重計に本発明を適用し、表示部113に、重量以外にも体脂肪率、筋肉量などが表示されるようにすることも可能である。
上述した重量計により行われる処理はハードウェア、またはソフトウェアにより実行可能である。ソフトウェアによる処理を実行する場合は、処理シーケンスを記録したプログラムを、重量計のROMにインストールして実行させる。プログラムは記憶部としてのハードディスク、メモリまたはROMなどにあらかじめ記録しておくことができる。または、プログラムはCD−ROM(Compact Disc Read Only Memory)、DVD(Digital Versatile Disc)、半導体メモリなどの記録媒体に記録しておくことも可能である。
また、本発明の係る処理を行うプログラムを格納した記録媒体は、パッケージソフトウェアとして提供することができる。使用者はそのパッケージソフトウェアを撮像装置にインストールする。さらに、プログラムは記録媒体からにインストールするほかに、重量計100をインターネットに接続し、インターネットにおいてアプリケーションとして提供されるものをインストールすることも可能である。
100、200、300・・・重量計
101、201・・・・・・・重量計本体
105・・・・・・・・・・・脚部
106・・・・・・・・・・・重量センサ
107、202、301・・・補正用重量センサ
109・・・・・・・・・・・CPU
210・・・・・・・・・・・上側カバー部
220・・・・・・・・・・・下側カバー部
101、201・・・・・・・重量計本体
105・・・・・・・・・・・脚部
106・・・・・・・・・・・重量センサ
107、202、301・・・補正用重量センサ
109・・・・・・・・・・・CPU
210・・・・・・・・・・・上側カバー部
220・・・・・・・・・・・下側カバー部
Claims (6)
- 本体と、
荷重に応じた重量を測定する第1重量測定部と、
前記本体の底面にかかる重量を測定する第2重量測定部と、
前記第2重量測定部による測定結果を用いて、前記第1重量測定部による測定結果を補正する補正処理部と
を備える重量計。 - 床面上に起立し、前記本体を前記床面から離間した状態で支持する複数の脚部を備え、
前記第2重量測定部は、前記本体にかかる荷重によって前記本体と前記床面とが接触することにより前記本体の底面にかかる重量を測定する
請求項1に記載の重量計。 - 前記第2重量測定部は、前記本体の底面の全面に設けられている
請求項1または2に記載の重量計。 - 前記本体の上側を構成する上側カバー部と、
前記本体の下側を構成し、前記本体の底面にかかる重量により上方向に変形可能な下側カバー部と
を備え、
前記第2重量測定部は、前記上側カバー部と前記下側カバー部との間に設けられており、前記下側カバー部が上方向に変形することにより前記第2重量測定部にかかる重量を測定する
請求項1または2に記載の重量計。 - 前記第2重量測定部は、前記本体の底面における前記複数の脚部から等距離の位置に設けられている
請求項2に記載の重量計。 - 荷重に応じた重量を測定し、
本体の底面にかかる重量を測定し、
前記本体の底面にかかる重量の測定結果を用いて、前記荷重に応じた重量の測定結果を補正する
重量測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013254028A JP2015114115A (ja) | 2013-12-09 | 2013-12-09 | 重量計および重量測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013254028A JP2015114115A (ja) | 2013-12-09 | 2013-12-09 | 重量計および重量測定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015114115A true JP2015114115A (ja) | 2015-06-22 |
Family
ID=53528061
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013254028A Pending JP2015114115A (ja) | 2013-12-09 | 2013-12-09 | 重量計および重量測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015114115A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022112810A (ja) * | 2021-01-22 | 2022-08-03 | パナソニックIpマネジメント株式会社 | 重量センサユニット |
| JP2022112809A (ja) * | 2021-01-22 | 2022-08-03 | パナソニックIpマネジメント株式会社 | 重量センサユニット |
| CN116124267A (zh) * | 2022-12-28 | 2023-05-16 | 深圳市晨北科技有限公司 | 称重结果的确定方法及装置、设备及存储介质 |
-
2013
- 2013-12-09 JP JP2013254028A patent/JP2015114115A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022112810A (ja) * | 2021-01-22 | 2022-08-03 | パナソニックIpマネジメント株式会社 | 重量センサユニット |
| JP2022112809A (ja) * | 2021-01-22 | 2022-08-03 | パナソニックIpマネジメント株式会社 | 重量センサユニット |
| JP7437769B2 (ja) | 2021-01-22 | 2024-02-26 | パナソニックIpマネジメント株式会社 | 重量センサユニット |
| JP7437770B2 (ja) | 2021-01-22 | 2024-02-26 | パナソニックIpマネジメント株式会社 | 重量センサユニット |
| CN116124267A (zh) * | 2022-12-28 | 2023-05-16 | 深圳市晨北科技有限公司 | 称重结果的确定方法及装置、设备及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101629844B (zh) | 称重秤及其控制方法 | |
| JP5097562B2 (ja) | 電子重量計 | |
| US9366588B2 (en) | Devices, systems and methods to determine area sensor | |
| EP2327968B1 (en) | Weight measuring apparatus for use as an input device of a game apparatus | |
| US10088937B2 (en) | Touch input device including a moment compensated bending sensor for load measurement on platform supported by bending beams | |
| US9759599B2 (en) | Weighing device having inductive sensing elements | |
| US20150177899A1 (en) | Elastomeric shear Material Providing Haptic Response Control | |
| US9395234B2 (en) | Stabilizing base for scale | |
| JP5107388B2 (ja) | 移動通信端末装置 | |
| JP2010078439A (ja) | 電子重量計および傾斜検知方法 | |
| CN103354921B (zh) | 触摸感应显示器 | |
| JP5898779B2 (ja) | 入力装置及び前記入力装置を用いた複数点の荷重検出方法 | |
| JP2015114115A (ja) | 重量計および重量測定方法 | |
| WO2017143358A9 (en) | Height measuring device | |
| US20170030765A1 (en) | Self-leveling scale | |
| JP6170774B2 (ja) | 測定システム、測定装置の測定方法、測定装置および測定装置の制御プログラム | |
| JP5992698B2 (ja) | 荷重計測システム及び情報処理装置 | |
| CN106456027A (zh) | 测量装置和测量方法 | |
| JP4982462B2 (ja) | 体重計 | |
| JP5893966B2 (ja) | 荷重計測システム及び情報処理装置 | |
| KR20140050233A (ko) | 정전용량 방식의 하중 측정장치 및 이에 사용되는 하중 검출유닛 | |
| JP2008295497A (ja) | 生体測定装置 | |
| HK1128520A (zh) | 体重计 |