JP2014012605A - Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program - Google Patents
Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program Download PDFInfo
- Publication number
- JP2014012605A JP2014012605A JP2013211458A JP2013211458A JP2014012605A JP 2014012605 A JP2014012605 A JP 2014012605A JP 2013211458 A JP2013211458 A JP 2013211458A JP 2013211458 A JP2013211458 A JP 2013211458A JP 2014012605 A JP2014012605 A JP 2014012605A
- Authority
- JP
- Japan
- Prior art keywords
- remote monitoring
- elevator
- activations
- management server
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 209
- 238000003745 diagnosis Methods 0.000 claims abstract description 27
- 230000005540 biological transmission Effects 0.000 claims abstract description 26
- 230000004913 activation Effects 0.000 claims description 150
- 238000001994 activation Methods 0.000 claims description 150
- 238000012545 processing Methods 0.000 claims description 15
- 238000007726 management method Methods 0.000 description 89
- 230000004044 response Effects 0.000 description 82
- 238000012423 maintenance Methods 0.000 description 38
- 238000000034 method Methods 0.000 description 25
- 238000007689 inspection Methods 0.000 description 21
- 238000004891 communication Methods 0.000 description 20
- 230000007246 mechanism Effects 0.000 description 14
- 230000005856 abnormality Effects 0.000 description 13
- 230000008569 process Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 6
- 230000003111 delayed effect Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000007639 printing Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000005236 sound signal Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images








Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Abstract
Description
この発明は、エレベーターの遠隔監視をおこなう遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムに関する。 The present invention relates to a remote monitoring support device, a remote monitoring system, a remote monitoring support program, and a remote monitoring program that perform remote monitoring of an elevator.
従来、エレベーターの状態を、当該エレベーターの遠隔地において監視するエレベーターの遠隔監視システムがあった。このような遠隔監視システムは、たとえば、エレベーターの運行動作を制御する制御基板(制御装置)と当該エレベーターの遠隔地に設置された管理サーバコンピュータとの間で通信をおこなうことによって、当該エレベーターの遠隔地において当該エレベーターの状態を監視する。 Conventionally, there has been an elevator remote monitoring system that monitors the state of an elevator at a remote location of the elevator. Such a remote monitoring system, for example, communicates between a control board (control device) that controls the operation operation of the elevator and a management server computer installed at a remote location of the elevator, thereby enabling remote control of the elevator. The state of the elevator is monitored on the ground.
具体的には、従来の遠隔監視システムにおいては、たとえば定期的に、エレベーターの診断動作をおこなう。診断動作に際しては、たとえば、管理サーバコンピュータから制御基板に対して、診断動作の実行を指示する指示信号を送信する。診断動作の実行を指示する指示信号を受信した制御基板は、エレベーターの動作状況に関する情報を取得し、取得した情報に基づいてエレベーターにおける異常発生の有無などを判断する。 Specifically, in a conventional remote monitoring system, for example, an elevator diagnosis operation is performed periodically. In the diagnosis operation, for example, an instruction signal instructing execution of the diagnosis operation is transmitted from the management server computer to the control board. The control board that has received the instruction signal instructing execution of the diagnostic operation acquires information on the operation status of the elevator and determines whether or not an abnormality has occurred in the elevator based on the acquired information.
このような診断動作に際しては、たとえば、エレベーターを昇降させるモーターの駆動時間、エレベーターが備えるブレーキや扉の動作状態および動作回数など、複数項目にわたる情報を制御基板から取得し、取得した情報に基づいて管理サーバコンピュータにおいて異常発生の有無などを判断していた。 In such a diagnostic operation, for example, information on a plurality of items such as a driving time of a motor for raising and lowering the elevator, a brake and a door operating state and the number of operations of the elevator are acquired from the control board, and based on the acquired information The management server computer was checked for the occurrence of an abnormality.
関連する技術として、従来、通常モードから保守モードへ切り替えることにより建物から監視センターへの発報を防止し、保守モードへ切り替わっている間、作業者が実施する保守作業のデータを保守作業データ記憶部に記憶し、通常モードへ切り替わったときに保守作業データ記憶部に記憶した保守作業データを取り込み、取り込まれた保守作業データに基づいて保守作業が適正であるか否かを判断するようにした技術があった(たとえば、下記特許文献1を参照。)。
As a related technology, conventionally, switching from the normal mode to the maintenance mode prevents notification from the building to the monitoring center, and maintenance work data stored by the operator during the change to the maintenance mode is stored. The maintenance work data stored in the maintenance work data storage section when the mode is switched to the normal mode is imported, and it is determined whether the maintenance work is appropriate based on the imported maintenance work data. There was a technique (for example, refer to
しかしながら、上述した従来の技術では、エレベーターを昇降させるモーターの駆動時間、エレベーターが備えるブレーキや扉の動作状態および動作回数など、複数項目にわたる情報に基づいて異常発生の有無などを判断していたため、当該診断動作にかかる管理サーバコンピュータや制御基板の負担が大きいという問題があった。 However, in the above-described conventional technology, because the drive time of the motor that raises and lowers the elevator, the brake equipped with the elevator, the operation state of the door and the number of operations, etc., the presence or absence of an abnormality has been determined based on information over a plurality of items. There has been a problem that the load on the management server computer and the control board for the diagnosis operation is heavy.
そして、上述した従来の技術では、診断動作にかかる管理サーバコンピュータや制御基板の負担が大きいために、診断動作以外の遠隔監視にかかる動作が遅延するなどの支障をきたし、利用者がカゴ内に閉じ込められた場合などにエレベーターからなされた発報への対応に遅れを生じかねないという問題があった。 In the conventional technology described above, the burden on the management server computer and the control board related to the diagnostic operation is large, causing troubles such as a delay in the operation related to remote monitoring other than the diagnostic operation. There has been a problem that the response to the notification made by the elevator may be delayed when trapped.
この発明は、上述した従来技術による問題点を解消するため、遠隔監視の対象となるエレベーターに対する信頼性の向上を図ることができる遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムを提供することを目的とする。 The present invention eliminates the above-described problems caused by the prior art, and can improve the reliability of an elevator to be remotely monitored, a remote monitoring support device, a remote monitoring system, a remote monitoring support program, and a remote monitoring program The purpose is to provide.
上述した課題を解決し、目的を達成するため、この発明にかかる遠隔監視支援装置は、エレベーターの動作を制御する制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得する取得手段と、前記取得手段が起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数する計数手段と、前記計数手段が計数した起動回数を記憶する記憶手段と、管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信する受信手段と、前記受信手段が診断指示を受信した場合、前記記憶手段が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する送信手段と、を備えたことを特徴とする。 In order to solve the above-described problems and achieve the object, a remote monitoring support device according to the present invention acquires an activation signal output when driving a cage included in the elevator from a control board that controls the operation of the elevator. Acquisition means, a counting means for counting the number of activations based on the activation signal each time the acquisition means obtains an activation signal, a storage means for storing the number of activations counted by the counting means, and a management server computer Receiving means for receiving a diagnosis instruction for instructing transmission of information relating to the state of the elevator, and when the receiving means receives the diagnosis instruction, information relating to the number of times of activation stored in the storage means is transmitted to the management server computer. And a transmission means.
また、この発明にかかる遠隔監視支援装置は、上記の発明において、前記計数手段が計数した起動回数が、あらかじめ設定された判断基準値を超えたか否かを判断する判断手段を備え、前記送信手段が、前記判断手段が前記起動回数が前記判断基準値を超えたと判断した場合、当該判断結果に関する情報を前記管理サーバコンピュータに送信することを特徴とする。 The remote monitoring support apparatus according to the present invention further comprises a determination unit that determines whether or not the number of activations counted by the counting unit exceeds a preset determination reference value in the above invention, and the transmission unit However, when the determination unit determines that the number of activations exceeds the determination reference value, the information on the determination result is transmitted to the management server computer.
また、この発明にかかる遠隔監視システムは、エレベーターの動作を制御する制御基板に接続される遠隔監視支援装置と、当該遠隔監視支援装置と通信可能な管理サーバコンピュータと、を備えた遠隔監視システムであって、前記遠隔監視支援装置が、前記制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得する取得手段と、前記取得手段が起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数する計数手段と、前記計数手段が計数した起動回数を記憶する記憶手段と、管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信する受信手段と、前記受信手段が診断指示を受信した場合、前記記憶手段が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する送信手段と、を備え、前記管理サーバコンピュータが、前記遠隔監視支援装置に対して前記診断指示を送信する診断指示手段と、前記診断指示手段が診断指示を送信した結果、該当する前記遠隔監視支援装置から送信された情報に基づいて、前記起動回数に関する情報を含む報告書情報を生成する報告書情報生成手段と、前記報告書情報生成手段が生成した報告書情報を出力する報告書情報出力手段と、を備えたことを特徴とする。 A remote monitoring system according to the present invention is a remote monitoring system comprising a remote monitoring support device connected to a control board that controls the operation of an elevator, and a management server computer that can communicate with the remote monitoring support device. Each time the remote monitoring support device acquires from the control board an activation signal that is output when driving the cage included in the elevator, and the acquisition unit acquires the activation signal, Counting means for counting the number of activations based on the activation signal, storage means for storing the number of activations counted by the counting means, and reception for receiving a diagnostic instruction for instructing transmission of information on the state of the elevator from the management server computer And when the receiving means receives the diagnostic instruction, the management means stores information relating to the number of activations stored in the storage means. A transmission means for transmitting to the computer, the management server computer transmits the diagnosis instruction to the remote monitoring support device, and the result of the diagnosis instruction means transmitting the diagnosis instruction, Based on the information transmitted from the corresponding remote monitoring support device, report information generating means for generating report information including information related to the number of activations, and outputting the report information generated by the report information generating means And a report information output means.
また、この発明にかかる遠隔監視システムは、上記の発明において、前記遠隔監視支援装置が、前記計数手段が計数した起動回数が、あらかじめ設定された判断基準値を超えたか否かを判断する判断手段を備え、前記送信手段が、前記判断手段が前記起動回数が前記判断基準値を超えたと判断した場合、当該判断結果に関する情報を前記管理サーバコンピュータに送信し、前記管理サーバコンピュータが、前記遠隔監視支援装置から前記判断結果に関する情報を受信した場合、所定の端末装置に対して該当するエレベーターに関する情報を出力する通知情報出力手段を備えることを特徴とする。 In the remote monitoring system according to the present invention, in the above invention, the remote monitoring support apparatus determines whether or not the number of activations counted by the counting means exceeds a preset determination reference value. When the determination unit determines that the number of activations exceeds the determination reference value, the transmission unit transmits information regarding the determination result to the management server computer, and the management server computer transmits the remote monitoring When information about the determination result is received from a support device, a notification information output unit is provided that outputs information about a corresponding elevator to a predetermined terminal device.
また、この発明にかかる遠隔監視支援プログラムは、エレベーターの動作を制御する制御基板に接続された遠隔監視支援装置が備えるコンピュータに、前記制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得し、起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数し、計数した起動回数を記憶部に記憶し、管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信した場合、前記記憶部が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する、処理を実行させることを特徴とする。 The remote monitoring support program according to the present invention is output from the control board to the computer provided in the remote monitoring support apparatus connected to the control board for controlling the operation of the elevator when driving the cage provided in the elevator. Each time the activation signal is acquired, the number of activations is counted based on the activation signal, the counted number of activations is stored in the storage unit, and the information regarding the state of the elevator is transmitted from the management server computer When a diagnostic instruction for instructing is received, information relating to the number of activations stored in the storage unit is transmitted to the management server computer, and processing is executed.
また、この発明にかかる遠隔監視プログラムは、エレベーターの動作を制御する制御基板に接続される遠隔監視支援装置と、当該遠隔監視支援装置と通信可能な管理サーバコンピュータと、を備えた遠隔監視システムに実行させる遠隔監視プログラムであって、前記遠隔監視支援装置が備えるコンピュータに、前記制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得し、起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数し、計数した起動回数を記憶部に記憶し、管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信した場合、前記記憶部が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する処理を実行させ、前記管理サーバコンピュータが備えるコンピュータに、前記遠隔監視支援装置に対して前記診断指示を送信し、前記診断指示を送信した結果、該当する前記遠隔監視支援装置から送信された情報に基づいて、前記起動回数に関する情報を含む報告書情報を生成し、生成した報告書情報を出力する処理を実行させることを特徴とする。 A remote monitoring program according to the present invention is a remote monitoring system comprising a remote monitoring support device connected to a control board that controls the operation of an elevator, and a management server computer that can communicate with the remote monitoring support device. A remote monitoring program to be executed, each time a startup signal output when driving a car provided in the elevator is acquired from the control board to a computer provided in the remote monitoring support device, and each time a startup signal is acquired , Counting the number of activations based on the activation signal, storing the counted number of activations in a storage unit, and receiving a diagnostic instruction for instructing transmission of information on the state of the elevator from the management server computer, the storage unit A process of transmitting information related to the number of activations to be stored to the management server computer; Based on the information transmitted from the corresponding remote monitoring support device as a result of transmitting the diagnostic instruction to the remote monitoring support device to a computer included in a server computer, the diagnosis instruction is transmitted. A process for generating report information including information and outputting the generated report information is executed.
この発明にかかる遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムによれば、遠隔監視の対象となるエレベーターに対する信頼性の向上を図ることができるという効果を奏する。 According to the remote monitoring support device, the remote monitoring system, the remote monitoring support program, and the remote monitoring program according to the present invention, there is an effect that it is possible to improve the reliability of an elevator that is a target of remote monitoring.
以下に添付図面を参照して、この発明にかかる遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムの好適な実施の形態を詳細に説明する。 Exemplary embodiments of a remote monitoring support device, a remote monitoring system, a remote monitoring support program, and a remote monitoring program according to the present invention will be described below in detail with reference to the accompanying drawings.
(実施の形態)
(遠隔監視システムのシステム構成)
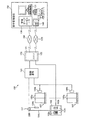
まず、この発明にかかる実施の形態のエレベーターの遠隔監視システムのシステム構成について説明する。図1は、この発明にかかる実施の形態の遠隔監視システムのシステム構成を示す説明図である。図1において、この発明にかかる実施の形態の遠隔監視システム100は、制御基板(制御装置)110と、遠隔監視支援装置120と、管理サーバコンピュータ130と、電話機140と、を備えている。
(Embodiment)
(System configuration of remote monitoring system)
First, a system configuration of an elevator remote monitoring system according to an embodiment of the present invention will be described. FIG. 1 is an explanatory diagram showing a system configuration of a remote monitoring system according to an embodiment of the present invention. 1, a
制御基板110は、エレベーター101の運行動作を制御する。エレベーター101は、複数階建てのビル内などに設置され、人や物品を搭載するカゴ(乗りかご)102を備えている。カゴ102は、1台のエレベーター101に1つずつ設けられている。カゴ102は、建物における各階床を、鉛直方向に沿って貫通する昇降路(図示を省略する)内に設けられている。エレベーター101は、たとえば、ロープ式(トラクション式)のエレベーターによって実現することができる。
The
この発明にかかる実施の形態の遠隔監視システムにより監視可能なエレベーター101は、ロープ式のエレベーターに限るものではない。この発明にかかる実施の形態の遠隔監視システムにおいては、ロープ式のエレベーター101に代えて、あるいは、ロープ式のエレベーターに加えて、たとえば、油圧式のエレベーター101を監視対象であってもよい。
The
カゴ102には、行先階ボタンや扉開閉ボタンなどを含む操作ボタン、表示器などを備えた操作盤102aが設けられている。カゴ102に設けられた操作盤102aは、制御基板110に接続されている。また、カゴ102には、インターフォンの端末装置102bが設けられている。インターフォンの端末装置102bは、呼出ボタンとマイクとスピーカーとを備えている(いずれも図示を省略する)。インターフォンの端末装置102bは、遠隔監視支援装置120に接続されている。
The
昇降路には、駆動機構104が設けられている。駆動機構104は、たとえば、昇降路における上部に設けることができる。駆動機構104は、巻上機、滑車、ロープ104a、カウンタウエイト104bなどによって構成されている。駆動機構104は、さらに、電磁ブレーキや調速機などを備えている(いずれも図示を省略する)。駆動機構104は、公知の技術を用いて容易に実現可能であるため説明を省略する。駆動機構104は、昇降路における上部に設けられるものに限らない。駆動機構104は、たとえば、油圧式のエレベーター101の場合は、昇降路における底部(ピット)に設けられていてもよい。
A
カゴ102はロープ104aの一端に連結され、カウンタウエイト104bはロープ104aの他端に連結されている。ロープ式のエレベーター101においては、両端にカゴ102およびカウンタウエイト104bが連結されたロープ104aをつるべ式に滑車および巻上機にかけた状態で当該巻上機を駆動し、ロープ104aと滑車との間の摩擦力(トラクション)を利用してカゴ102を昇降させる。昇降路には、カゴ102の昇降位置をガイドするガイドレール(図示を省略する)が設けられている。
The
昇降路における各階床に対応した位置(乗り場)105およびカゴ102には、それぞれ扉105a、102cが設けられている。カゴ102には、当該カゴ102に設けられた扉102cおよび乗り場105に設けられた扉105aを開閉させるモーター(図示を省略する)が設けられている。モーターは、制御基板110に接続されている。
乗り場105に設けられた扉105aは、インターロックなどと称される装置で施錠されている。エレベーター101が停止階に到着した状態でモーターを駆動すると、カゴ102に設けられた扉102cの駆動機構部分とインターロックとがかみ合ってインターロックによる施錠が解放され、カゴ102に設けられた扉102cおよび乗り場105に設けられた扉105aが連動して開閉する。
A
各乗り場105には、乗り場呼びボタン(図示を省略する)や表示器などを備えた操作盤105bが、それぞれ設置されている。各乗り場105に設けられた操作盤105bは、それぞれ、制御基板110に接続されている。カゴ102や乗り場105に設けられた各操作盤102a、105bは、エレベーター101の利用者などによる入力操作を受け付けるごとに、当該入力操作の内容に応じた信号を、制御基板110に出力する。
Each
遠隔監視支援装置120は、主制御基板121と音声通信基板122とを備えている。主制御基板121は、制御基板110および管理サーバコンピュータ130に接続されている。主制御基板121は、たとえば、制御基板110が備える保守点検用の端子(図示を省略する)を介して当該制御基板110に接続されている。
The remote
また、主制御基板121は、インターネットなどのネットワーク160を介して、管理サーバコンピュータ130に接続されている。インターネットを使用することにより、緊急時に電話回線がパンクすることによってエレベーター101の状況把握が遅延することを防止し、迅速な対応をとることができる。
The
音声通信基板122は、インターフォンの端末装置102bおよび公衆音声網170に接続されている。音声通信基板122は、具体的には、たとえば、PHS(Personal Handy−phone System)基板によって実現することができる。公衆音声網170は、固定電話網(公衆交換電話網)および携帯電話網を含む。公衆音声網170は、電話線を収容する加入者線交換機、加入者線交換機を束ねる中継交換機、ほかの事業者の電話網と接続する関門交換機など、図示を省略する複数の交換機によって構成されている。公衆音声網170については、公知の技術であるため説明を省略する。
The
上記の主制御基板121は、音声通信基板122が備えるPHS基板を用いて通信をおこなってもよい。この場合、遠隔監視支援装置120は、PHS基板を音声通信に用いるとともにデータ通信にも用いる。エレベーター101の設置場所は固定であるため、PHSを利用した通信をおこなうことにより、通信の品質を確保するとともに通信にかかるコストを抑制することができる。
The
管理サーバコンピュータ130および電話機140は、エレベーター101が設置されている場所とは異なる、当該エレベーター101の遠隔地に設置されている。管理サーバコンピュータ130は、たとえば、パーソナルコンピュータなどのコンピュータ装置によって実現することができる。管理サーバコンピュータ130は、たとえば、エレベーター101の保守管理を担う保守管理会社150に設置することができる。
The
管理サーバコンピュータ130には、操作用の端末装置131が接続されていてもよい。管理サーバコンピュータ130と操作用の端末装置131とは、同じ場所に設置されていてもよく、異なる場所に設置されていてもよい。操作用の端末装置131は、1台であってもよく、複数台であってもよい。操作用の端末装置131は、たとえば、キーボードやマウスなどの入力デバイスや、ディスプレイなどを備えたパーソナルコンピュータなどのコンピュータ装置によって実現することができる。また、操作用の端末装置131には、プリンタ(図示を省略する)が接続されていてもよい。
An
保守管理会社150には、管理サーバコンピュータ130に加えて、PBX(Private Branch eXchange、図2における符号205を参照)および電話機140が設置されている。電話機140は、PBXを介して公衆音声網170に接続されている。遠隔監視システムにおいてはPBXを設けず、電話機140を公衆音声網170に直接接続してもよい。
In addition to the
(遠隔監視システム100のハードウエア構成)
つぎに、この発明にかかる実施の形態の遠隔監視システム100を構成する遠隔監視支援装置120のハードウエア構成について説明する。図2は、この発明にかかる実施の形態の遠隔監視システム100を構成する遠隔監視支援装置120のハードウエア構成を示す説明図である。
(Hardware configuration of remote monitoring system 100)
Next, a hardware configuration of the remote
図2において、制御基板110は、エレベーター101を構成する各部を駆動制御することにより、エレベーター101の運行動作を制御する。制御基板110は、たとえば、駆動機構104を駆動制御する。カゴ102に設けられた操作盤102aや乗り場105に設けられた操作盤105bなど、制御基板110に接続された各操作盤102a、105bは、エレベーター101の利用者などによる入力操作を受け付けるごとに、当該入力操作の内容に応じた信号を、制御基板110に出力する。制御基板110は、操作盤102a、105bから出力された信号に基づいてエレベーター101を駆動制御する。
In FIG. 2, the
具体的には、制御基板110は、たとえば、カゴ102や乗り場105に設けられた各操作盤102a、105bから出力された信号に基づいて、上記の駆動機構104やモーターなど、エレベーター101が備える各部を駆動制御する。より具体的には、制御基板110は、たとえば、乗り場105に設けられた操作盤105bから呼び信号が出力された場合は、当該呼び信号の出力元となる操作盤が設けられた乗り場105に向けてカゴ102を昇降動作させ、該当する乗り場105においてカゴ102を停止させるように、駆動機構104に対して駆動信号を出力することによって当該駆動機構104を駆動制御する。
Specifically, the
また、具体的には、制御基板110は、たとえば、カゴ102に設けられた操作盤102aから、所定の階床を指定する信号が出力された場合は、当該所定の階床に向けてカゴ102を昇降動作させ、該当する乗り場105においてカゴ102を停止させるように、駆動機構104に対して駆動信号を出力することによって当該駆動機構104を駆動制御する。
Specifically, for example, when a signal designating a predetermined floor is output from the
また、制御基板110は、たとえば、該当する乗り場105において停止したカゴ102に設けられた扉102cおよび乗り場105に設けられた扉105aを開閉させるように、カゴ102に設けられたモーターに対して駆動信号を出力することによって当該モーターを駆動制御する。
Further, the
制御基板110は、たとえば、カゴ102が走行を開始する場合に、走行開始信号を出力する。制御基板110は、たとえば、走行中のカゴ102が走行を停止した場合に、走行停止信号を出力する。走行開始信号は、たとえば、カゴ102が走行を開始したことを通知する専用の信号によって実現することができる。あるいは、走行開始信号は、たとえば、カゴ102に設けられたモーターに対して出力される駆動信号によって実現してもよい。
For example, when the
走行停止信号は、たとえば、走行中のカゴ102が走行を停止したことを通知する専用の信号によって実現することができる。あるいは、走行停止信号は、たとえば、カゴ102に設けられたモーターに対して出力される駆動信号によって実現し、当該駆動信号の出力が停止されたことをもって走行中のカゴ102が走行を停止したことを検出するようにしてもよい。
The travel stop signal can be realized, for example, by a dedicated signal for notifying that the traveling
また、制御基板110は、たとえば、カゴ102に設けられた操作盤102aや乗り場105に設けられた操作盤105bにおいてカゴ102の位置を表示するために、各制御盤102a、105bに階床信号を出力する。制御基板110は、たとえば、カゴ102の位置が切り替わるごとに階床信号を出力する。あるいは、制御基板110は、たとえば、カゴ102の位置にかかわらず、定期的に階床信号を出力するものであってもよい。
In addition, the
階床信号が示す階床は、カゴ102が階床を移動するごとに切り替わる。たとえば、カゴ102が、1階から3階へ移動する場合、階床信号が示す階床はカゴ102の移動にともなって「1階→2階→3階」と切り替わる。この場合、階床信号は、少なくとも扉105a、102cの開閉動作に要する時間以上の間、停止階である3階を示す。また、この場合、階床信号が、通過する階床である2階を示す時間は、所定時間より短い。具体的には、階床信号が、通過する階床(この場合は「2階」)を示す時間は、扉105a、102cの開閉動作に要する時間よりも短い。
The floor indicated by the floor signal is switched every time the
また、制御基板110は、カゴ102に設けられた操作盤102aや乗り場105に設けられた操作盤105bからの呼び信号に応じてカゴ102を昇降動作させる際に、制御基板に設けられた起動用のリレーに通電する。エレベーター101においては、起動用のリレーに対して通電がなされた場合(起動用のリレーに対して通電をおこなわせる信号が出力された場合)に、カゴ102の昇降動作が可能になる。起動用のリレーは、通電がなされた場合に、当該通電がなされたことを示す信号を出力する。
In addition, the
制御基板110は、カゴ102を1回移動させるごとに、起動用のリレーに対して通電をおこなう。具体的には、たとえば、カゴ102が1階から2階へ移動する場合に起動用のリレーに対して1回の通電をおこない、カゴ102が1階から2階を通過して3階へ移動する場合に起動用のリレーに対して1回の通電をおこなう。また、制御基板110は、カゴ102を1回移動させるごとに、起動用のリレーに加えて、各種のリレーに対して通電し、カゴ102の移動にともなって各種のリレーをON/OFF動作させる。
The
制御基板110は、異常を検知した場合に、当該異常を通知する信号を出力(発報)する。具体的には、制御基板110は、たとえば、扉105a、102cの開閉動作を実行する指示信号を出力したにもかかわらず、該当する扉が動作しないことを検出した場合に、エレベーター101において異常が発生したことを発報する。
When the
制御基板110は、カゴ102の昇降動作や扉105a、102cの開閉動作に際して駆動した各部の動作履歴を記憶してもよい。具体的には、制御基板110は、たとえば、カゴ102の昇降動作や扉105a、102cの開閉動作に際して動作した各種リレーの動作回数などを記憶してもよい。
The
インターフォンの端末装置102bは、呼出ボタンが操作された場合に、当該操作があったことを示す呼出信号を、遠隔監視支援装置120に出力する。また、インターフォンの端末装置102bは、遠隔監視支援装置120と保守管理会社150に設置された電話機140との接続が確立された状態でマイクに入力された音声信号を、遠隔監視支援装置120に出力する。また、インターフォンの端末装置102bは、遠隔監視支援装置120と電話機140との接続が確立された状態で遠隔監視支援装置120から出力された音声信号を、スピーカーを介して出力する。
When the call button is operated, the
遠隔監視支援装置120が備える主制御基板121は、中継基板201と、監視制御基板202と、メモリ203と、通信I/F(インターフェイス)204と、を備えている。中継基板201は、制御基板110から出力された信号の入力を受け付け、入力を受け付けた信号を解析し、解析結果を監視制御基板202に出力する。中継基板201は、たとえば、保守点検用の端子を介して保守点検用の信号の入力を受け付け、当該保守点検用の信号を解析する。中継基板201は、エレベーター101が備える各部と制御基板110とを接続するコネクタ基板(図示を省略する)における各種のリレー接点などに直接接続されていてもよい。
The
また、中継基板201は、保守点検用の端子(メンテナンスポート)を介して制御基板110に接続されているものに限らない。中継基板201は、保守点検用の端子(メンテナンスポート)に代えて、たとえば、各乗り場105に設けられた操作盤105bと制御基板110とを接続するI/O基板のコネクタ部に接続されていてもよい。この場合、たとえば、I/O基板のコネクタ部に、信号の経路を複数に分岐するコネクタなどを設けることにより、各乗り場105に設けられた操作盤105bと制御基板110との接続を確保するとともに、当該操作盤105bと制御基板110との間の通信に用いる信号を利用して、階床信号を取得することができる。階床信号については説明を後述する(図4を参照)。
Further, the
監視制御基板202は、中継基板201から出力された解析結果を、通信I/F204を介して管理サーバコンピュータ130に送信する。また、監視制御基板202は、中継基板201から出力された解析結果を、メモリ203に記憶する。監視制御基板202は、中継基板201が入力を受け付けた信号を、直接メモリ203に記憶してもよい。
The
メモリ203は、電源の供給が絶たれた場合にも記憶した情報を保持する不揮発性の記憶媒体によって実現することができる。具体的には、メモリ203は、たとえば、フラッシュメモリ203、EEPROM(Electrically Erasable Programmable Read−Only Memory)、EPROM(Erasable Programmable Read Only Memory)などによって実現することができる。
The
監視制御基板202は、通信I/F204を介して、管理サーバコンピュータ130から送信された各種の指示信号を受信する。そして、監視制御基板202は、管理サーバコンピュータ130から送信された各種の指示信号に応じた各種の動作指示を生成し、生成した各種の動作の実行を指示する指示信号を中継基板201を介して制御基板110に出力する。
The
監視制御基板202は、たとえば、管理サーバコンピュータ130から送信された診断動作の実行を指示する指示信号(以下適宜「診断指示」という)を受信した場合、診断動作の実行を指示する指示信号を生成し、生成した指示信号を中継基板201を介して制御基板110に出力する。診断動作の実行を指示する指示信号は、たとえば、エレベーター101を所定の階床に移動させるための呼び信号を含む。
For example, when receiving an instruction signal instructing execution of a diagnostic operation transmitted from the management server computer 130 (hereinafter referred to as “diagnostic instruction” as appropriate), the
音声通信基板122は、インターフォンの端末装置102bから出力された呼出信号を受け付けた場合、公衆音声網170を介して、保守管理会社150に設置された電話機140に割り当てられた電話番号に対する発呼をおこなう。また、音声通信基板122は、保守管理会社150に設置された電話機140との接続が確立された状態でマイクから出力された音声信号を、公衆音声網170を介して、保守管理会社150に設置された電話機140に出力する。また、音声通信基板122は、電話機140との接続が確立された状態で当該電話機140から出力された音声信号を、公衆音声網170を介して受信し、受信した音声信号をインターフォンの端末装置102bが備えるスピーカーに出力する。
When the
管理サーバコンピュータ130は、保守作業員などによる操作用の端末装置131に対する入力操作により受け付けた操作に応じて、遠隔監視支援装置120に対して各種の動作の実行を指示する指示信号を出力する。管理サーバコンピュータ130は、たとえば、診断動作の実行を指示する指示信号を出力する。
The
管理サーバコンピュータ130は、たとえば、1ヶ月ごとなどの所定期間ごとに、遠隔監視支援装置120に対して、診断動作の実行を指示する指示信号を送信する。診断動作の実行を指示する指示信号を受信した遠隔監視支援装置120は、受信した診断動作の実行を指示する指示信号に基づいて、所定の信号を制御基板110に適宜出力し、出力した信号に応じて制御基板110から出力された信号を受信する。そして、制御基板110から受信した信号に基づいて応答情報を生成し、生成した応答情報を管理サーバコンピュータ130に出力する。
The
管理サーバコンピュータ130は、遠隔監視支援装置120に対して送信した各種の指示信号に応じて当該遠隔監視支援装置120から送信された応答情報に基づいて、報告書情報を生成する。管理サーバコンピュータ130は、たとえば、診断動作の実行を指示する指示信号を送信した結果、遠隔監視支援装置120から受信した応答情報に基づいて、報告書情報を生成する。この場合、管理サーバコンピュータ130は、たとえば、エレベーター101の起動回数に関する情報を含む報告書情報を生成する。
The
また、管理サーバコンピュータ130は、生成した報告書情報に基づいて、報告書(図3を参照)を発行する機能を備えている。報告書は、たとえば、診断動作をおこなうごと、すなわち、遠隔監視支援装置120に対して診断動作の実行を指示する指示信号を送信するごとにおこなうことができる。
Further, the
具体的には、管理サーバコンピュータ130は、たとえば、生成した報告書情報に基づいて、当該報告書情報を紙などの記録媒体に印刷するための印刷情報を生成し、生成した印刷情報を、管理サーバコンピュータ130に接続された操作用の端末装置131に出力する。操作用の端末装置131は、印刷情報を受け付けた場合、当該操作用の端末装置131に接続されたプリンタを駆動制御させることによって報告書を発行する。
Specifically, the
(報告書の一例)
図3は、報告書の一例を示す説明図である。図3においては、この発明にかかる実施の形態の遠隔監視システム100を構成する管理サーバコンピュータ130が発行する報告書の一例を示している。
(Example of report)
FIG. 3 is an explanatory diagram showing an example of a report. FIG. 3 shows an example of a report issued by the
図3において、報告書300は、エレベーター101の診断動作をおこなうごとに発行される。報告書300は、管理サーバコンピュータ130から遠隔監視支援装置120に対して診断動作の実行を指示する指示信号を送信した結果、遠隔監視支援装置120から受信した応答情報に基づいて生成した報告書情報にしたがって作成される。
In FIG. 3, a
遠隔監視システム100において、管理サーバコンピュータ130は、診断動作の実行を指示する指示信号を定期的に出力する場合、当該指示信号に応じた応答情報を受信するごとに報告書300を発行する。すなわち、診断動作の実行を指示する指示信号を定期的に出力する場合は、当該指示信号に応じた応答情報も定期的に受信することになるため、報告書300が定期的に発行される。
In the
報告書300は、応答情報を受信するごとに発行するものに限らない。管理サーバコンピュータ130は、遠隔監視支援装置120から受信した応答情報や当該応答情報に基づいて生成した報告書情報を記憶しておき、保守点検作業をおこなう作業員などによる操作用の端末装置131に対する所定の操作を受け付けた場合に、記憶した応答情報あるいは報告書情報に基づく報告書300を発行するようにしてもよい。
The
報告書300は、たとえば、報告書情報を紙に印刷することによって出力される。報告書300には、たとえば、報告書情報として、起動回数に関する情報を示すグラフ310が印刷されている。グラフ310は、たとえば、1ヶ月など所定期間におけるエレベーター101の起動回数を示すシンボル(棒など)を配列したグラフ(棒グラフ)の形状をなす。
The
図3においては、1ヶ月などの各期間における起動回数を、棒グラフにおけるシンボルの長さによってあらわしているため、起動回数の多少をわかりやすく案内することができる。また、図3においては、起動回数の多少に応じて長さの異なるシンボルを、複数ヶ月分示しているため、1ヶ月ごとの起動回数の推移や、先月に対する今月の起動回数の増減などをわかりやすく案内することができる。 In FIG. 3, since the number of activations in each period such as one month is represented by the length of the symbol in the bar graph, the number of activations can be guided in an easy-to-understand manner. In addition, in FIG. 3, symbols with different lengths corresponding to the number of activations are shown for a plurality of months, so it is possible to know the changes in the number of activations per month and the increase / decrease in the number of activations this month relative to the previous month. Easy to guide.
所定期間ごとの起動回数の推移は、図3に示したような棒グラフの形状であらわすものに限らない。所定期間ごとの起動回数の推移は、たとえば、エレベーター101の起動回数を縦軸にとるとともに時間の経過を横軸にとり、エレベーター101の起動回数を示すプロットを直線で結んだ折れ線グラフの形状をなすものであってもよい。また、報告書情報は、グラフなどの図形で示すものに限らず、文字や記号によって示すものであってもよい。
The transition of the number of activations for each predetermined period is not limited to that represented by the shape of the bar graph as shown in FIG. The transition of the number of activations for each predetermined period is, for example, in the form of a line graph in which the number of activations of the
図3においては、複数ヶ月分の起動回数を示す情報が印刷された報告書300を例にして説明したが、報告書における起動回数の案内方法はこれに限るものではない。この発明にかかる実施の形態の遠隔監視システム100を用いたサービスの提供に際しては、たとえば、前回診断動作をおこなってから今回診断動作をおこなうまでの起動回数に関する情報のみを印刷した報告書300を発行するようにしてもよい。
In FIG. 3, the
(遠隔監視システム100の機能的構成)
つぎに、この発明にかかる実施の形態の遠隔監視システム100の機能的構成について説明する。図4は、この発明にかかる実施の形態の遠隔監視システム100を構成する遠隔監視支援装置120および管理サーバコンピュータ130の機能的構成を示すブロック図である。
(Functional configuration of remote monitoring system 100)
Next, a functional configuration of the
(遠隔監視支援装置120の機能的構成)
図4において、この発明にかかる実施の形態のエレベーター101の遠隔監視支援装置120の各機能は、取得部401、計数部402、判断部403、記憶部404、受信部405、生成部406および送信部407によって実現される。この発明にかかる実施の形態のエレベーター101の遠隔監視支援装置120が備える取得部401、計数部402、判断部403、記憶部404、受信部405、生成部406および送信部407の各機能は、遠隔監視支援装置120が備える各部によって実現することができる。
(Functional configuration of remote monitoring support device 120)
In FIG. 4, each function of the remote
取得部401は、エレベーター101の動作を制御する制御基板110から、当該エレベーター101が備えるカゴ102を駆動する際に出力される起動信号を取得する。取得部401は、たとえば、階床信号を起動信号として取得する。取得部401は、たとえば、制御基板110から直接、階床信号を取得する。
The
また、取得部401は、たとえば、制御基板110から、カゴ102に設けられた操作盤102aに出力された階床信号を取得してもよい。この場合、取得部401は、制御基板110から出力される階床信号が入力される操作盤102aから、当該階床信号を取得する。
Moreover, the
また、取得部401は、たとえば、制御基板110から、乗り場105に設けられた操作盤105bに出力された階床信号を取得してもよい。この場合、取得部401は、制御基板110から出力される階床信号が入力される操作盤105bから、当該階床信号を取得する。具体的には、この場合、取得部401は、各乗り場105に設けられた、当該各乗り場105においてカゴ102の位置を表示する表示装置から、階床信号を取得することができる。
Moreover, the
また、取得部401は、たとえば、起動用のリレーや、その他カゴ102の移動にともなってON/OFF動作する各種のリレーに対して通電がなされた場合に当該起動用のリレーや各種のリレーから出力される信号を、起動信号として取得してもよい。あるいは、取得部401は、たとえば、起動用のリレーや、その他各種のリレーに対して通電をおこなうために制御基板110から出力される信号を、起動信号として取得してもよい。
In addition, the
また、取得部401は、たとえば、カゴ102の移動にともなってON/OFF動作する各種のリレーから、当該各種のリレーが動作したことを示す信号を、当該各種のリレーの接点から直接取得してもよい。すなわち、カゴ102は制御基板110から出力される制御信号にしたがって動作するため、当該カゴ102の移動にともなってON/OFF動作する各種のリレーの動作信号を取得することにより、エレベーター101が備えるカゴ102を駆動する際に出力される起動信号を取得することができる。
In addition, the
起動信号は、階床信号、起動用のリレーに対して通電がなされた場合に当該起動用のリレーから出力される信号、あるいは、起動用のリレーその他各種のリレーに対して通電する際に制御基板110から出力される信号に限るものではない。起動信号は、カゴ102が移動する際に出力される、あるいはカゴ102の移動にともなって変化する各種の信号によって実現することができる。
The start signal is controlled when the floor signal, the signal output from the start relay when the start relay is energized, or the start relay and other various relays are energized. The signal is not limited to the signal output from the
計数部402は、取得部401が起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数する。たとえば、取得部401が階床信号を起動信号として取得した場合、計数部402は、階床信号に基づいて、カゴ102が移動を開始してから停止するまでを1回分の起動として起動回数を計数する。
Each time the
この場合、具体的には、計数部402は、たとえば、カゴ102が1階から2階に移動した場合、起動回数は1回として計数する。また、この場合、具体的には、計数部402は、たとえば、カゴ102が1階から5階に移動する途中で4階に停止した場合、カゴ102が1階から4階に移動したことによる起動回数が1回、カゴ102が4階から5階に移動したことによる起動回数が1回、合計で起動回数が2回として計数する(図5を参照)。
In this case, specifically, for example, when the
また、たとえば、取得部401が、起動用のリレーに対して通電がなされた場合に当該起動用のリレーから出力される信号、あるいは、起動用のリレーに対して通電をおこなわせる際に制御基板110から出力される信号を起動信号として取得した場合、計数部402は、当該信号が出力された回数を起動回数として計数する。
In addition, for example, when the
判断部403は、計数部402が計数した起動回数が、あらかじめ設定された判断基準値を超えたか否かを判断する。判断基準値は、保守点検をおこなう時期の判断の目安となる値であって、正の整数によって実現され、メモリ203などの記憶部404に記憶しておくことができる。判断基準値は、たとえば、管理サーバコンピュータ130を介して、保守点検をおこなう作業者が任意に指定することができる。
The
記憶部404は、計数部402が計数した起動回数を記憶する。記憶部404は、たとえば、管理サーバコンピュータ130から診断動作の実行を指示する指示信号(診断指示)を前回受信してから、つぎに受信するまでの期間ごとに、計数部402が計数した起動回数を記憶する。また、記憶部404は、たとえば、1ヶ月などの所定期間ごとに、計数部402が計数した起動回数を記憶してもよい。
The
また、記憶部404は、判断部403の判断結果を記憶してもよい。この場合、記憶部404は、たとえば、計数部402が計数した起動回数が判断基準値を超えたと判断部403が判断した日時や、そのときの起動回数などを記憶してもよい。また、この場合、記憶部404は、判断部403の判断結果にかかわらず、判断部403が判断をおこなった日時を記憶してもよい。
The
受信部405は、管理サーバコンピュータ130から診断動作の実行を指示する指示信号(診断指示)を含む各種の指示信号を受信する。受信部405は、たとえば、診断動作の実行を指示する指示信号に加えて、カゴ102を所定の階床に移動させたり、移動させたカゴ102および該当する乗り場105の扉を開閉させたりする指示信号などを受信する。
The receiving
生成部406は、受信部405が管理サーバコンピュータ130から診断動作の実行を指示する指示信号を受信した場合に、記憶部404が記憶する起動回数に関する情報を含む応答情報を生成する。生成部406は、たとえば、記憶部404が記憶する最新の起動回数、すなわち、直近の期間内に計数された起動回数を含み、遠隔監視システム100による遠隔監視を開始してから、監視対象となるエレベーター101が備えるカゴ102が走行した複数期間における起動回数を含む応答情報を生成する。あるいは、生成部406は、前回診断指示を受信した時点以降に、記憶部404に記憶された起動回数を含む応答情報を生成してもよい。あるいは、生成部406は、前回保守点検をおこなった以降に、記憶部404に記憶された起動回数を含む応答情報を生成してもよい。
When the
また、生成部406は、判断部403が起動回数が判断基準値を超えたと判断した場合、当該判断結果に関する情報を含む応答情報(通知用の応答情報)を生成する。この場合、生成部406は、たとえば、判断基準値や当該判断基準値を超えたと判断した時点における起動回数、当該判断をおこなった日時に関する情報などを含む応答情報(通知用の応答情報)を生成する。いずれの起動回数を含む応答情報(通知用の応答情報)を生成するかは、たとえば、管理サーバコンピュータ130を介して、保守点検をおこなう作業者が任意に指定することができる。
In addition, when the
生成部406は、応答情報または通知用の応答情報に含まれる起動回数にかかるエレベーター101の識別情報を含む応答情報を生成する。エレベーター101の識別情報は、たとえば、当該エレベーター101の製造番号であってもよいし、当該エレベーター101の設置場所(住所など)に基づいて設定される番号であってもよいし、当該エレベーター101の保守点検をおこなう作業者などが任意に設定した番号であってもよい。エレベーター101の識別情報は、所定桁数の数字やアルファベットなどの文字を組み合わせて構成することができる。
The
送信部407は、受信部405が診断指示を受信した場合、記憶部404が記憶する起動回数に関する情報を管理サーバコンピュータ130に送信する。送信部407は、具体的には、たとえば、受信部405が診断指示を受信した場合に生成部406が生成した応答情報あるいは通知用の応答情報を、管理サーバコンピュータ130に送信する。
When the
また、送信部407は、判断部403が起動回数が判断基準値を超えたと判断した場合、当該判断結果に関する情報を管理サーバコンピュータに送信する。この場合、送信部407は、具体的には、たとえば、判断部403が起動回数が判断基準値を超えたと判断した場合に生成部406が生成した応答情報(通知用の応答情報)を、管理サーバコンピュータ130に送信する。
Further, when the
(管理サーバコンピュータ130の機能的構成)
図4において、管理サーバコンピュータ130は、指示受付部411、指示信号生成部412、診断指示部413、応答情報受信部414、報告書情報生成部415、記憶部416、報告書情報出力部417、通知情報生成部418および通知情報出力部419を備えている。この発明にかかる実施の形態の管理サーバコンピュータ130が備える指示受付部411、指示信号生成部412、診断指示部413、応答情報受信部414、報告書情報生成部415、記憶部416、報告書情報出力部417、通知情報生成部418および通知情報出力部419の各機能は、管理サーバコンピュータ130が備える各部によって実現することができる。
(Functional configuration of management server computer 130)
4, the
指示受付部411は、操作用の端末装置131から出力された操作信号の入力を受け付ける。指示受付部411は、たとえば、保守点検をおこなう作業員などによって操作用の端末装置131に対して所定の入力操作がおこなわれることにより、当該操作用の端末装置131から出力される診断動作の実行を指示する操作信号の入力を受け付ける。操作信号は、監視対象とするエレベーター101に実行させる動作を指定する情報や、監視対象となるエレベーター101の識別情報などを含む。
The
指示信号生成部412は、指示受付部411が入力を受け付けた操作信号に基づいて、遠隔監視支援装置120における診断動作の実行を指示する指示信号を生成する。指示信号は、たとえば、監視対象とするエレベーター101に実行させる動作を指定する情報や、監視対象となるエレベーター101の識別情報を含む指示信号を生成する。
The instruction
診断指示部413は、指示信号生成部412が生成した指示信号を、該当する遠隔監視支援装置120に対して送信する。該当する遠隔監視支援装置120は、たとえば、指示信号に含まれるエレベーター101の識別情報によって特定することができ、当該監視対象となるエレベーター101に接続された遠隔監視支援装置120によって実現される。
The
応答情報受信部414は、診断指示部413が指示信号を送信した結果、該当する遠隔監視支援装置120から送信された応答情報を受信する。応答情報受信部414は、診断指示部413が指示信号を送信してからの経過時間を計時してもよい。これにより、診断指示部413が指示信号を送信してから所定時間が経過しても、該当する遠隔監視支援装置120から送信された応答情報を受信していない場合に、エラー報知をおこなうことができる。
The response
報告書情報生成部415は、応答情報受信部414が受信した応答情報に基づいて報告書情報を生成する。報告書情報は、たとえば、遠隔監視支援装置120が計数した起動回数に関する情報を含む。
The report
記憶部416は、応答情報受信部414が受信した応答情報を記憶する。記憶部416は、たとえば、応答情報受信部414が受信した応答情報の内容のみでなく、当該応答情報の送信元となる遠隔監視支援装置120が接続されたエレベーター101の識別情報や、当該応答情報を受信した日時に関する情報を記憶してもよい。また、記憶部416は、たとえば、報告書情報生成部415が生成した報告書情報を記憶してもよい。この場合、記憶部416は、たとえば、報告書情報生成部415が生成した報告書情報の内容のみでなく、当該報告書情報によって状態が報告されるエレベーター101の識別情報や、当該報告書情報が生成された日時に関する情報を記憶してもよい。
The
報告書情報出力部417は、報告書情報生成部415が生成した報告書情報を、操作用の端末装置131に対して出力する。報告書情報出力部417は、報告書情報生成部415が生成した報告書情報に加えて、当該報告書情報を印刷出力する指示情報をあわせて送信する。また、報告書情報出力部417は、操作用の端末装置131から入力を受け付けた操作信号に応じて、記憶部416が記憶する報告書情報などを抽出し、抽出した報告書情報を操作用の端末装置131に対して出力してもよい。
The report
通知情報生成部418は、応答情報受信部414が受信した応答情報に基づいて、通知情報を生成する。通知情報生成部418は、応答情報受信部414が受信した応答情報に、遠隔監視支援装置120が備える判断部403による判断結果が含まれる場合に、通知情報を生成する。
The notification
通知情報生成部418は、たとえば、該当するエレベーター101、すなわち、応答情報受信部414が受信した応答情報に基づいて特定されるエレベーター101に関する情報を含む通知情報を生成する。具体的には、通知情報生成部418は、たとえば、該当するエレベーター101の点検を促すメッセージや、該当するエレベーター101の所在地などを案内する情報などを含む通知情報を生成する。
For example, the notification
また、通知情報生成部418は、生成した通知情報の通知先を特定し、特定した通知先へ出力(送信)する通知情報を生成する。具体的には、たとえば、エレベーター101の識別情報と、通知先となる端末装置の識別情報と、を関連付けたテーブルをあらかじめ設定しておく。通知先となる端末装置は、たとえば、管理サーバコンピュータ130に接続された操作用の端末装置131であってもよく、保守点検をおこなう作業員が携帯する携帯型電話機などの携帯型の端末装置であってもよい。
In addition, the notification
そして、通知情報の生成に際して当該テーブルを参照し、受信部が受信した応答情報に含まれるエレベーター101の識別情報に関連付けられた端末装置の識別情報を特定する。端末装置の識別情報は、たとえば、各端末装置に割り当てられた電子メールアドレスによって実現することができる。通知情報の生成に際して参照するテーブルは、たとえば、管理サーバコンピュータ130が備えるHDDなどの記憶媒体によって実現される記憶部404に格納しておくことができる。
And the said table is referred at the time of the production | generation of notification information, The identification information of the terminal device linked | related with the identification information of the
通知情報出力部419は、通知情報生成部418が生成した通知情報を、所定の端末装置に出力する。通知情報出力部419は、遠隔監視支援装置120から当該遠隔監視支援装置120においておこなった判断結果に関する情報を受信した場合、すなわち、通知情報生成部418において通知情報が生成された場合に、通知情報生成部418が生成した通知情報を、所定の端末装置に出力する。
The notification
また、通知情報出力部419は、通知情報生成部418が生成した通知情報を、たとえば、操作用の端末装置131に出力する。この場合、操作用の端末装置131を介して、保守点検をおこなう作業員に対して、該当するエレベーター101の点検を促すことができる。通知情報出力部419は、通知情報生成部418が生成した通知情報を、たとえば、保守点検をおこなう作業員が携帯する携帯型の電話機などの携帯型の端末装置に電子メールとして出力(送信)してもよい。この場合、保守点検をおこなう作業員に対して、当該作業員の現在地にかかわらず、該当するエレベーター101の点検を促すことができる。
Further, the notification
(起動回数の計数方法の一例)
つぎに、この発明にかかる実施の形態の遠隔監視支援装置120における起動回数の計数方法の一例について説明する。図5は、この発明にかかる実施の形態の遠隔監視支援装置120における起動回数の計数方法の一例を示す説明図である。図5において、縦軸は、エレベーター101の階床を示している。また、図5において、横軸は、起動回数を示している。
(An example of how to count the number of activations)
Next, an example of a method for counting the number of activations in the remote
上述したように、カゴ102は、制御基板110から出力された信号にしたがって移動を開始し、指定された階床で停止し、扉105a、102cを開閉するという1回分の起動動作をおこなう。さらに、制御基板110から該当する信号が1回出力されると、カゴ102は、当該信号にしたがって移動を開始し、指定された階床で停止し、扉105a、102cを開閉するという1回分の起動動作をおこなう。
As described above, the
この実施の形態では、カゴ102は、制御基板110から出力された信号にしたがって移動を開始して、上記のような1回分の起動動作をおこなう。この実施の形態における遠隔監視支援装置120は、カゴ102が移動を開始してから停止するまでを1回の起動動作とする。あるいは、起動動作は、制御基板110から出力された信号にしたがってカゴ102が移動を開始してから停止し、その後扉105a、102cを開閉するまでを1回の起動動作としてもよい。
In this embodiment, the
そして、この実施の形態における遠隔監視支援装置120は、カゴ102に1回分の起動動作をおこなわせる際に1回ずつ出力される信号の出力回数を計数することにより、エレベーター101の起動回数を計数することができる。あるいは、この実施の形態における遠隔監視支援装置120は、カゴ102が1回分の起動動作をおこなう際に一連の変化をする信号(階床信号など)の状態を検出することにより、エレベーター101の起動回数を計数することができる。
Then, the remote
エレベーター101は、制御基板110が出力した信号にしたがって、カゴ102が昇降移動するように制御基板110によって駆動される。具体的には、カゴ102は、たとえば、制御基板110が所定の信号を出力した場合に、当該信号にしたがって、1階から2階に移動したり、1階から途中の3階で停止した後に5階に移動したりする。
The
図5において、丸印の数字「1」は、1回の起動を示している。エレベーター101においては、1回の起動により1階から2階へ1階床分を移動する場合もあれば、1階から5階へ4階床分を移動する場合もある。また、エレベーター101においては、1階から途中の3階で停止した後に5階に移動する場合、1階から3階への移動を1回の起動、3階から5階への移動を1回の起動、計2回の起動として計数する。
In FIG. 5, the circled number “1” indicates one activation. In the
また、エレベーター101においては、6階から途中停止することなく1階に移動する場合、1回の起動として計数する。すなわち、起動回数は、カゴ102が移動した階床数ではなく、カゴ102が移動を開始してから停止するまでの一連の動作をおこなった回数と等しい。上記のように、カゴ102は、起動用のリレーに対して通電がなされた場合(起動用のリレーに対して通電をおこなわせる信号が出力された場合)に起動動作を開始するため、図5においては、カゴ102が起動動作を開始する前に、起動回数を計数する例を示している。
Moreover, in the
(遠隔監視支援装置120の処理手順)
つぎに、この発明にかかる実施の形態の遠隔監視支援装置120の処理手順について説明する。図6および図7は、この発明にかかる実施の形態の遠隔監視システム100を構成する遠隔監視支援装置120の処理手順を示すフローチャートである。図6のフローチャートに示す処理は、制御基板110から出力された階床信号を取得した場合に実行される。
(Processing procedure of remote monitoring support device 120)
Next, a processing procedure of the remote
図6のフローチャートにおいて、まず、制御基板110から出力された起動信号を取得するまで待機する(ステップS601:No)。ステップS601において、制御基板110から出力された起動信号を取得した場合(ステップS601:Yes)、当該起動信号に基づいて起動回数を+1するように起動回数を計数する(ステップS602)。そして、ステップS602において計数した起動回数を、メモリ203などの記憶部404に記憶する(ステップS603)。
In the flowchart of FIG. 6, first, the process waits until an activation signal output from the
つぎに、ステップS602において計数した起動回数が、あらかじめ定められている判断基準値を超えたか否かを判断する(ステップS604)。ステップS604においては、たとえば、メモリ203などの記憶部404から判断基準値を取得し、取得した判断基準値とステップS602において計数した起動回数との大小を判断する。そして、取得した判断基準値よりもステップS602において計数した起動回数の方が大きい場合に、起動回数が判断基準値を超えたと判断する。
Next, it is determined whether or not the number of activations counted in step S602 exceeds a predetermined criterion value (step S604). In step S604, for example, a determination reference value is acquired from the
ステップS604において、ステップS602において計数した起動回数が、あらかじめ定められている判断基準値を超えている場合(ステップS604:Yes)、通知用の応答情報を生成する(ステップS605)。ステップS605においては、たとえば、判断基準値や当該判断基準値を超えたと判断した時点における起動回数、当該判断をおこなった日時に関する情報などを含む通知用の応答情報を生成する。 In step S604, when the number of activations counted in step S602 exceeds a predetermined criterion value (step S604: Yes), notification response information is generated (step S605). In step S605, for example, notification response information including the determination reference value, the number of activations when it is determined that the determination reference value has been exceeded, information on the date and time when the determination is made, and the like are generated.
そして、管理サーバコンピュータ130に対して、ステップS605において生成した通知用の応答情報を送信し(ステップS606)、メモリ203などの記憶部404に、管理サーバコンピュータ130に対する通知履歴を記憶して(ステップS607)、一連の処理を終了する。ステップS607においては、たとえば、ステップS606において送信した通知用の応答情報の内容や、当該通知用の応答情報を送信した日時に関する情報を記憶する。
Then, the response information for notification generated in step S605 is transmitted to the management server computer 130 (step S606), and the notification history for the
一方、ステップS604において、ステップS602において計数した起動回数が、あらかじめ定められている判断基準値を超えていない場合(ステップS604:No)、メモリ203などの記憶部404に、ステップS604における判断結果を記憶して(ステップS608)、一連の処理を終了する。ステップS608により、判断以降におこなわれる保守点検などに際して、判断の履歴を確認することができる。
On the other hand, in step S604, when the number of activations counted in step S602 does not exceed a predetermined determination reference value (step S604: No), the determination result in step S604 is stored in the
図7のフローチャートにおいて、まず、管理サーバコンピュータ130から送信された診断指示を受信するまで待機する(ステップS701:No)。ステップS701において、管理サーバコンピュータ130から送信された診断指示を受信した場合(ステップS701:Yes)、メモリ203を参照して、起動回数を取得する(ステップ702)。
In the flowchart of FIG. 7, first, the process waits until a diagnostic instruction transmitted from the
つぎに、ステップS702において取得した起動回数を含む応答情報を生成し(ステップS703)、管理サーバコンピュータ130に対して、ステップS703において生成した応答情報を送信して(ステップS704)、一連の処理を終了する。 Next, response information including the number of activations acquired in step S702 is generated (step S703), the response information generated in step S703 is transmitted to the management server computer 130 (step S704), and a series of processing is performed. finish.
(管理サーバコンピュータ130の処理手順)
図8および図9は、この発明にかかる実施の形態の遠隔監視システム100を構成する管理サーバコンピュータ130の処理手順を示すフローチャートである。図8のフローチャートにおいて、まず、操作用の端末装置131から出力された所定の操作信号の入力を受け付けるまで待機する(ステップS801:No)。ステップS801においては、保守点検をおこなう作業員などによって操作用の端末装置131に対して所定の入力操作がおこなわれることにより、当該操作用の端末装置131から出力される診断動作の実行を指示する操作信号の入力を受け付けるまで待機する。
(Processing procedure of the management server computer 130)
8 and 9 are flowcharts showing the processing procedure of the
ステップS801において、診断動作の実行を指示する操作信号の入力を受け付けた場合(ステップS801:Yes)、遠隔監視支援装置120における診断動作の実行を指示する指示信号(診断指示)を生成する(ステップS802)。そして、遠隔監視支援装置120に対して、ステップS802において生成した指示信号(診断指示)を送信して(ステップS803)、一連の処理を終了する。
In step S801, when an input of an operation signal instructing execution of a diagnostic operation is received (step S801: Yes), an instruction signal (diagnosis instruction) instructing execution of a diagnostic operation in the remote
図9のフローチャートにおいて、まず、遠隔監視支援装置120から送信された応答情報を受信するまで待機する(ステップS901:No)。ステップS901において、遠隔監視支援装置120から送信された応答情報を受信した場合(ステップS901:Yes)、受信した応答情報が通知用の応答情報であるか否かを判断する(ステップS902)。
In the flowchart of FIG. 9, first, it waits until it receives the response information transmitted from the remote monitoring support device 120 (step S901: No). When the response information transmitted from the remote
ステップS902において、ステップS901:Yesにおいて受信した応答情報が通知用の応答情報ではない場合(ステップS902:No)、ステップS901:Yesにおいて受信した応答情報を、上記の図8のステップS803において指示信号を送信した結果受信した応答情報であると判断し、当該応答情報に基づいて報告書情報を生成する(ステップS903)。 In step S902, if the response information received in step S901: Yes is not notification response information (step S902: No), the response information received in step S901: Yes is used as an instruction signal in step S803 of FIG. It is determined that the response information has been received as a result of the transmission, and report information is generated based on the response information (step S903).
その後、ステップS903において生成した報告書情報を、該当する端末装置に出力して(ステップS904)、一連の処理を終了する。ステップS904においては、たとえば、ステップS903において生成した報告書情報を、操作用の端末装置131に対して出力する。
Thereafter, the report information generated in step S903 is output to the corresponding terminal device (step S904), and the series of processes is terminated. In step S904, for example, the report information generated in step S903 is output to the
ステップS904において出力した報告書情報を受け付けた操作用の端末装置131は、たとえば、当該報告書情報に基づいて印刷情報を生成し、当該印刷情報に基づいて操作用の端末装置131に接続されているプリンタを駆動制御することによって、報告書300を発行する。
The
一方、ステップS902において、ステップS901:Yesにおいて受信した応答情報が通知用の応答情報である場合(ステップS902:Yes)、当該通知用の応答情報に基づいて通知先を特定する(ステップS905)。ステップS905においては、たとえば、エレベーター101の識別情報と、通知先となる端末装置の識別情報と、を関連付けたテーブルを参照することによって通知先を特定することができる。
On the other hand, in step S902, when the response information received in step S901: Yes is notification response information (step S902: Yes), the notification destination is specified based on the notification response information (step S905). In step S905, for example, the notification destination can be specified by referring to a table in which the identification information of the
つぎに、ステップS901:Yesにおいて受信した応答情報(通知用の応答情報)に基づいて、通知情報を生成する(ステップS906)。ステップS906においては、ステップS905において特定した通知先に宛てて、たとえば、該当するエレベーター101の点検を促すメッセージや、該当するエレベーター101の所在地などを案内する情報などを含む通知情報を生成する。その後、ステップS905において特定した通知先となる端末装置に、ステップS906において生成した通知情報を出力(送信)して(ステップS907)、一連の処理を終了する。
Next, based on the response information (response information for notification) received in step S901: Yes, notification information is generated (step S906). In step S906, notification information including, for example, a message for prompting inspection of the
以上説明したように、この発明にかかる実施の形態の遠隔監視支援装置120は、エレベーター101の動作を制御する制御基板110から、当該エレベーター101が備えるカゴ102を駆動する際に出力される起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数し、計数した起動回数をメモリ203などの記憶部404に記憶する。その後、管理サーバコンピュータ130からエレベーター101の状態に関する情報の送信を指示する診断指示を受信した場合、メモリ203などの記憶部404が記憶する起動回数に関する情報を、管理サーバコンピュータ130に送信する。
As described above, the remote
この発明にかかる実施の形態の遠隔監視支援装置120によれば、カゴ102の動作にともなって制御基板110から出力される起動信号を取得することにより、遠隔監視支援装置120がエレベーター101の起動回数を直接認識するためのセンサなどを別途設けることなく簡易な構成で、エレベーター101の動作状況を遠隔監視支援装置120において確実に認識することができる。
According to the remote
また、この発明にかかる実施の形態の遠隔監視支援装置120を用いた遠隔監視システム100によれば、起動回数に基づいてエレベーター101の動作状況を把握することができるので、エレベーター101の動作状況の把握に際しての、遠隔監視支援装置120や管理サーバコンピュータ130における演算の処理負担を減らすことができる。
Further, according to the
一般的に、管理サーバコンピュータ130は、複数台のエレベーター101の動作を監視している。各エレベーター101(の制御基板110)からは、当該エレベーター101に異常が発生した場合に当該異常を通知する情報が送信(発報)される。この発報を受信した場合、管理サーバコンピュータ130あるいは当該管理サーバコンピュータ130を操作する作業員は、受信した発報に基づいて、エレベーター101に発生した異常に対する対応をおこなう。この対応は、人命に関わる場合もあるため、いち早く検知し、重大な障害になる前あるいは障害が深刻化する前におこなうことが要求される。
In general, the
この発明にかかる実施の形態の遠隔監視支援装置120を用いた遠隔監視システム100によれば、エレベーター101の動作状況の把握に際しての、遠隔監視支援装置120や管理サーバコンピュータ130における演算の処理負担を減らすことができるので、エレベーター101の動作状況を把握するために負担がかかることによって遠隔監視にかかる動作が遅延することを防止し、エレベーター101に発生した異常に対する対応を迅速におこなうことができる。これによって、この発明にかかる実施の形態の遠隔監視支援装置120および遠隔監視システム100によれば、遠隔監視の対象となるエレベーター101に対する信頼性の向上を図ることができる。
According to the
また、この発明にかかる実施の形態の遠隔監視支援装置120は、計数した起動回数が、あらかじめ設定された判断基準値を超えた場合に、当該判断結果に関する情報を含む通知用の応答情報を管理サーバコンピュータ130に送信する。これにより、保守点検の必要がある場合は、その旨を保守管理会社150における作業員などに迅速かつ確実に通知することができる。また、起動回数が判断基準値を超えていない場合は通知をおこなわないことにより、遠隔監視支援装置120と管理サーバコンピュータ130との通信にかかる双方の負担を軽減することができる。
Further, the remote
これによって、エレベーター101の動作状況を把握するために負担がかかることによって遠隔監視にかかる動作が遅延することを防止し、エレベーター101に発生した異常に対する対応を迅速におこなうことができる。そして、これによって、この発明にかかる実施の形態の遠隔監視支援装置120および遠隔監視システム100によれば、遠隔監視の対象となるエレベーター101に対する信頼性の向上を図ることができる。
As a result, it is possible to prevent the operation related to the remote monitoring from being delayed due to the burden imposed on grasping the operation status of the
また、この発明にかかる実施の形態の遠隔監視支援装置120を用いた遠隔監視システム100によれば、起動回数と判断基準値とを比較する簡易な演算によってエレベーター101の動作状況を把握することができる。これによって、エレベーター101の動作状況を把握するために負担がかかることによって遠隔監視にかかる動作が遅延することを防止し、エレベーター101に発生した異常に対する対応を迅速におこなうことができる。そして、これによって、この発明にかかる実施の形態の遠隔監視支援装置120および遠隔監視システム100によれば、遠隔監視の対象となるエレベーター101に対する信頼性の向上を図ることができる。
Further, according to the
また、この発明にかかる遠隔監視システム100は、遠隔監視支援装置120から管理サーバコンピュータ130に通知用の応答情報を送信した場合は、管理サーバコンピュータ130が、操作用の端末装置131や携帯型の電話機などの携帯型の端末装置などの所定の端末装置に対して、該当するエレベーターに関する情報を出力する。
In the
これによって、この発明にかかる実施の形態の遠隔監視支援装置120を用いた遠隔監視システム100によれば、エレベーター101に発生した異常に対する対応を、当該対応への適任者が、迅速におこなうことができる。そして、これによって、この発明にかかる実施の形態の遠隔監視支援装置120および遠隔監視システム100によれば、遠隔監視の対象となるエレベーター101に対する信頼性の向上を図ることができる。
As a result, according to the
なお、上述した実施の形態で説明した遠隔監視支援装置および遠隔監視システムは、遠隔監視システムを構成するパーソナルコンピュータやワークステーションなどのコンピュータにおいて遠隔監視支援プログラムおよび遠隔監視プログラムを実行することにより実現することができる。また、これらの遠隔監視支援プログラムおよび遠隔監視プログラムをパーソナルコンピュータやワークステーションなどのコンピュータで実行することにより、遠隔監視支援方法および遠隔監視方法を実現することができる。これらのプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。 Note that the remote monitoring support apparatus and the remote monitoring system described in the above-described embodiments are realized by executing the remote monitoring support program and the remote monitoring program on a computer such as a personal computer or a workstation constituting the remote monitoring system. be able to. Moreover, the remote monitoring support method and the remote monitoring method can be realized by executing the remote monitoring support program and the remote monitoring program on a computer such as a personal computer or a workstation. These programs are recorded on a computer-readable recording medium such as a hard disk, a flexible disk, a CD-ROM, an MO, and a DVD, and are executed by being read from the recording medium by the computer. The program may be a transmission medium that can be distributed via a network such as the Internet.
以上のように、この発明にかかる遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムは、エレベーターの遠隔監視をおこなう遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムに有用であり、特に、診断動作を定期的におこなうことによってエレベーターの遠隔監視をおこなう遠隔監視支援装置、遠隔監視システム、遠隔監視支援プログラムおよび遠隔監視プログラムに適している。 As described above, the remote monitoring support device, the remote monitoring system, the remote monitoring support program, and the remote monitoring program according to the present invention are the remote monitoring support device, the remote monitoring system, the remote monitoring support program, and the remote monitoring that perform remote monitoring of the elevator. It is useful for a program, and is particularly suitable for a remote monitoring support device, a remote monitoring system, a remote monitoring support program, and a remote monitoring program that perform remote monitoring of an elevator by periodically performing a diagnostic operation.
100 遠隔監視システム
110 制御基板
120 遠隔監視支援装置
121 主制御基板
122 音声通信基板
130 管理サーバコンピュータ
140 電話機
401 取得部
402 計数部
403 判断部
404 記憶部
405 受信部
406 生成部
407 送信部
411 指示受付部
412 指示信号生成部
413 診断指示部
414 応答情報受信部
415 報告書情報生成部
416 記憶部
417 報告書情報出力部
418 通知情報生成部
419 通知情報出力部
DESCRIPTION OF
Claims (6)
前記取得手段が起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数する計数手段と、
前記計数手段が計数した起動回数を記憶する記憶手段と、
管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信する受信手段と、
前記受信手段が診断指示を受信した場合、前記記憶手段が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する送信手段と、
を備えたことを特徴とする遠隔監視支援装置。 From the control board that controls the operation of the elevator, an acquisition means for acquiring an activation signal that is output when driving the basket included in the elevator,
Each time the acquisition means acquires the activation signal, the counting means for counting the number of activations based on the activation signal,
Storage means for storing the number of activations counted by the counting means;
Receiving means for receiving a diagnostic instruction for instructing transmission of information relating to the state of the elevator from the management server computer;
When the receiving unit receives a diagnostic instruction, a transmitting unit that transmits information related to the number of activations stored in the storage unit to the management server computer;
A remote monitoring support apparatus characterized by comprising:
前記送信手段は、前記判断手段が前記起動回数が前記判断基準値を超えたと判断した場合、当該判断結果に関する情報を前記管理サーバコンピュータに送信することを特徴とする請求項1に記載の遠隔監視支援装置。 A determination means for determining whether or not the number of activations counted by the counting means exceeds a preset determination reference value;
2. The remote monitoring according to claim 1, wherein when the determination unit determines that the number of activations exceeds the determination reference value, the transmission unit transmits information regarding the determination result to the management server computer. Support device.
前記遠隔監視支援装置は、
前記制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得する取得手段と、
前記取得手段が起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数する計数手段と、
前記計数手段が計数した起動回数を記憶する記憶手段と、
管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信する受信手段と、
前記受信手段が診断指示を受信した場合、前記記憶手段が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する送信手段と、を備え、
前記管理サーバコンピュータは、
前記遠隔監視支援装置に対して前記診断指示を送信する診断指示手段と、
前記診断指示手段が診断指示を送信した結果、該当する前記遠隔監視支援装置から送信された情報に基づいて、前記起動回数に関する情報を含む報告書情報を生成する報告書情報生成手段と、
前記報告書情報生成手段が生成した報告書情報を出力する報告書情報出力手段と、を備えたことを特徴とする遠隔監視システム。 A remote monitoring system comprising: a remote monitoring support device connected to a control board for controlling the operation of the elevator; and a management server computer communicable with the remote monitoring support device,
The remote monitoring support device includes:
From the control board, an acquisition means for acquiring an activation signal that is output when driving the basket provided in the elevator,
Each time the acquisition means acquires the activation signal, the counting means for counting the number of activations based on the activation signal,
Storage means for storing the number of activations counted by the counting means;
Receiving means for receiving a diagnostic instruction for instructing transmission of information relating to the state of the elevator from the management server computer;
A transmission means for transmitting, to the management server computer, information related to the number of activations stored in the storage means when the receiving means receives a diagnostic instruction;
The management server computer
Diagnostic instruction means for transmitting the diagnostic instruction to the remote monitoring support device;
As a result of the diagnosis instruction means transmitting a diagnosis instruction, based on the information transmitted from the corresponding remote monitoring support device, report information generation means for generating report information including information on the number of activations;
A remote monitoring system comprising: report information output means for outputting report information generated by the report information generation means.
前記計数手段が計数した起動回数が、あらかじめ設定された判断基準値を超えたか否かを判断する判断手段を備え、
前記送信手段は、前記判断手段が前記起動回数が前記判断基準値を超えたと判断した場合、当該判断結果に関する情報を前記管理サーバコンピュータに送信し、
前記管理サーバコンピュータは、
前記遠隔監視支援装置から前記判断結果に関する情報を受信した場合、所定の端末装置に対して該当するエレベーターに関する情報を出力する通知情報出力手段を備えることを特徴とする請求項3に記載の遠隔監視システム。 The remote monitoring support device includes:
A determination means for determining whether or not the number of activations counted by the counting means exceeds a preset determination reference value;
When the determination unit determines that the number of activations exceeds the determination reference value, the transmission unit transmits information on the determination result to the management server computer,
The management server computer
4. The remote monitoring according to claim 3, further comprising: a notification information output unit configured to output information related to a corresponding elevator to a predetermined terminal device when information related to the determination result is received from the remote monitoring support device. system.
前記制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得し、
起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数し、
計数した起動回数を記憶部に記憶し、
管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信した場合、前記記憶部が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する、処理を実行させることを特徴とする遠隔監視支援プログラム。 In the computer provided in the remote monitoring support device connected to the control board for controlling the operation of the elevator,
From the control board, obtain an activation signal that is output when driving the basket provided in the elevator,
Each time the activation signal is acquired, the number of activations is counted based on the activation signal,
Store the counted number of activations in the storage unit,
When a diagnostic instruction for instructing transmission of information related to the state of the elevator is received from a management server computer, information relating to the number of activations stored in the storage unit is transmitted to the management server computer, and processing is executed. Remote monitoring support program.
前記遠隔監視支援装置が備えるコンピュータに、
前記制御基板から、当該エレベーターが備えるカゴを駆動する際に出力される起動信号を取得し、
起動信号を取得するごとに、当該起動信号に基づいて起動回数を計数し、
計数した起動回数を記憶部に記憶し、
管理サーバコンピュータから前記エレベーターの状態に関する情報の送信を指示する診断指示を受信した場合、前記記憶部が記憶する起動回数に関する情報を前記管理サーバコンピュータに送信する処理を実行させ、
前記管理サーバコンピュータが備えるコンピュータに、
前記遠隔監視支援装置に対して前記診断指示を送信し、
前記診断指示を送信した結果、該当する前記遠隔監視支援装置から送信された情報に基づいて、前記起動回数に関する情報を含む報告書情報を生成し、
生成した報告書情報を出力する処理を実行させることを特徴とする遠隔監視プログラム。 A remote monitoring program to be executed by a remote monitoring system comprising: a remote monitoring support device connected to a control board for controlling the operation of the elevator; and a management server computer communicable with the remote monitoring support device,
In the computer provided in the remote monitoring support device,
From the control board, obtain an activation signal that is output when driving the basket provided in the elevator,
Each time the activation signal is acquired, the number of activations is counted based on the activation signal,
Store the counted number of activations in the storage unit,
When receiving a diagnostic instruction for instructing transmission of information relating to the state of the elevator from the management server computer, causing the storage unit to store information relating to the number of times of activation stored in the management server computer,
In the computer provided in the management server computer,
Sending the diagnostic instruction to the remote monitoring support device;
As a result of transmitting the diagnostic instruction, based on the information transmitted from the corresponding remote monitoring support device, to generate report information including information on the number of activations,
A remote monitoring program for executing processing for outputting generated report information.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013211458A JP2014012605A (en) | 2013-10-08 | 2013-10-08 | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013211458A JP2014012605A (en) | 2013-10-08 | 2013-10-08 | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012150008A Division JP5389228B1 (en) | 2012-07-03 | 2012-07-03 | Remote monitoring support device, remote monitoring system, and remote monitoring program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014012605A true JP2014012605A (en) | 2014-01-23 |
| JP2014012605A5 JP2014012605A5 (en) | 2015-09-10 |
Family
ID=50108589
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013211458A Pending JP2014012605A (en) | 2013-10-08 | 2013-10-08 | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014012605A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6806282B1 (en) * | 2020-06-25 | 2021-01-06 | 三菱電機株式会社 | Elevator remote monitoring system |
| EP3459890B1 (en) | 2017-09-20 | 2024-04-03 | Otis Elevator Company | Health monitoring of safety braking systems for elevators |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05170385A (en) * | 1991-12-20 | 1993-07-09 | Hitachi Building Syst Eng & Service Co Ltd | Elevator maintenance data creation device |
| JP2002003114A (en) * | 2000-06-16 | 2002-01-09 | Mitsubishi Electric Building Techno Service Co Ltd | Maintenance and inspection device of elevator |
| JP2009091101A (en) * | 2007-10-05 | 2009-04-30 | Toshiba Elevator Co Ltd | Emulation device of elevator |
| JP2010095360A (en) * | 2008-10-17 | 2010-04-30 | Toshiba Elevator Co Ltd | Function variable type remote monitoring system and method |
-
2013
- 2013-10-08 JP JP2013211458A patent/JP2014012605A/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05170385A (en) * | 1991-12-20 | 1993-07-09 | Hitachi Building Syst Eng & Service Co Ltd | Elevator maintenance data creation device |
| JP2002003114A (en) * | 2000-06-16 | 2002-01-09 | Mitsubishi Electric Building Techno Service Co Ltd | Maintenance and inspection device of elevator |
| JP2009091101A (en) * | 2007-10-05 | 2009-04-30 | Toshiba Elevator Co Ltd | Emulation device of elevator |
| JP2010095360A (en) * | 2008-10-17 | 2010-04-30 | Toshiba Elevator Co Ltd | Function variable type remote monitoring system and method |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3459890B1 (en) | 2017-09-20 | 2024-04-03 | Otis Elevator Company | Health monitoring of safety braking systems for elevators |
| JP6806282B1 (en) * | 2020-06-25 | 2021-01-06 | 三菱電機株式会社 | Elevator remote monitoring system |
| CN113844969A (en) * | 2020-06-25 | 2021-12-28 | 三菱电机株式会社 | Elevator remote monitoring system |
| JP2022007019A (en) * | 2020-06-25 | 2022-01-13 | 三菱電機株式会社 | Elevator remote monitoring system |
| TWI775270B (en) * | 2020-06-25 | 2022-08-21 | 日商三菱電機股份有限公司 | Elevator remote monitoring system |
| CN113844969B (en) * | 2020-06-25 | 2022-12-02 | 三菱电机株式会社 | Elevator remote monitoring system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5389228B1 (en) | Remote monitoring support device, remote monitoring system, and remote monitoring program | |
| JP5389229B1 (en) | Remote monitoring support device and remote monitoring system | |
| JP5289607B1 (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP5389226B2 (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP5599530B1 (en) | Remote monitoring support device | |
| JP5289603B1 (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP2014012571A (en) | Remote monitoring support device and remote monitoring system | |
| JP2014012605A (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP2014012606A (en) | Remote monitoring support device, and remote monitoring system | |
| JP5611491B1 (en) | Remote monitoring support device | |
| JP5591424B1 (en) | Remote monitoring support device | |
| JP5745692B1 (en) | Remote monitoring support device | |
| JP5960668B2 (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP5960646B2 (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP5599532B1 (en) | Remote monitoring support device | |
| JP6302633B2 (en) | Remote monitoring system, remote monitoring program and remote monitoring method | |
| JP5960645B2 (en) | Remote monitoring support device, remote monitoring system, remote monitoring support program, and remote monitoring program | |
| JP6387266B2 (en) | Control board | |
| JP6317651B2 (en) | Control board | |
| JP6251653B2 (en) | Control board | |
| JP6150767B2 (en) | Remote monitoring support device | |
| JP2016172631A (en) | Telephone call management system for elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160804 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170117 |