JP2013530392A - 空間における物体を検出決定するセンサー装置 - Google Patents
空間における物体を検出決定するセンサー装置 Download PDFInfo
- Publication number
- JP2013530392A JP2013530392A JP2013510351A JP2013510351A JP2013530392A JP 2013530392 A JP2013530392 A JP 2013530392A JP 2013510351 A JP2013510351 A JP 2013510351A JP 2013510351 A JP2013510351 A JP 2013510351A JP 2013530392 A JP2013530392 A JP 2013530392A
- Authority
- JP
- Japan
- Prior art keywords
- space
- sensor
- detection
- nipple
- milking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000001514 detection method Methods 0.000 claims abstract description 175
- 210000002445 nipple Anatomy 0.000 claims abstract description 111
- 241001465754 Metazoa Species 0.000 claims abstract description 53
- 238000000034 method Methods 0.000 claims abstract description 30
- 230000004044 response Effects 0.000 claims description 25
- 238000005286 illumination Methods 0.000 claims description 18
- 235000013365 dairy product Nutrition 0.000 claims description 8
- 230000001678 irradiating effect Effects 0.000 claims description 5
- 239000008267 milk Substances 0.000 claims description 4
- 235000013336 milk Nutrition 0.000 claims description 4
- 210000004080 milk Anatomy 0.000 claims description 4
- 241000283690 Bos taurus Species 0.000 description 11
- 238000010586 diagram Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 230000001960 triggered effect Effects 0.000 description 5
- 230000014509 gene expression Effects 0.000 description 4
- 238000011282 treatment Methods 0.000 description 4
- 210000000481 breast Anatomy 0.000 description 3
- 239000000835 fiber Substances 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 241000283707 Capra Species 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000007654 immersion Methods 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01J—MANUFACTURE OF DAIRY PRODUCTS
- A01J5/00—Milking machines or devices
- A01J5/017—Automatic attaching or detaching of clusters
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01J—MANUFACTURE OF DAIRY PRODUCTS
- A01J5/00—Milking machines or devices
- A01J5/017—Automatic attaching or detaching of clusters
- A01J5/0175—Attaching of clusters
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01J—MANUFACTURE OF DAIRY PRODUCTS
- A01J5/00—Milking machines or devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Animal Husbandry (AREA)
- Environmental Sciences (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices Characterised By Use Of Acoustic Means (AREA)
Abstract
【構成】本発明は、動物の乳首の位置などの、空間に存在する少なくとも1つの物体の位置を検出決定する装置、システムおよび/または方法である。本装置は、センサー列から構成することができる。センサー列の各センサーは、トランスミッター/レシーバー対からなる。各対内のトランスミッターおよびレシーバーは、所定の角度で配置し、信号を通じて空間における物体を検出する。本発明の実施態様は、一つかそれ以上の検出装置からなり、空間における一つかそれ以上の物体を検出することができる。本発明装置は、搾乳動物の搾乳を行うシステムに適用することができる。
【選択図】図1
【選択図】図1
Description
本出願は、米国仮特許出願第61/345,011号(出願日:2010年5月14日)および米国仮特許出願第61/351,687号(出願日:2010年6月4日)の米国特許法第119(e)条による優先権を主張する出願である。これら出願の内容は、いずれも本開示に援用するものとする。
本発明は、空間における物体の位置を検出決定する装置、システムおよび方法に関する。より具体的には、本発明は、動物の乳首の三次元的位置を検出する装置、システムおよび方法に関する。
乳牛などの搾乳動物を対象とする自動システムおよび半自動システムは公知である。これらシステムの重要な技術面は、動物の乳首を検出決定することである。
従来の乳首検出決定システムの一部の場合、デュアル超音波センサーを使用して、乳首までの距離を測定する。この場合、超音波信号を解析するためには、複雑なコンピュータアルゴリズムが必要である。
同様に、多重レーザーセンサーを備えたシステムを使用して、信号を発信し、乳首までの距離を測定している。ここでも同じように、信号を解析し、乳首位置を計算するためにコンピュータアルゴリズムが必要である。例えばUSP6,647,919には、光線または光線ビームを射出するトランスミッター素子、およびこれら光線または光線ビームの反射を受信するレシーバー素子を備えた、動物乳首の空間位置を決定する装置が開示されている。本発明では、乳首の全体から見た位置および異なるレベルにおけるその位置を三角形分割(triangulation)によって求める。
動物乳首の空間位置を決定する他のシステムもあるが、いずれも複雑であり、酪農分野では十分な耐久性に欠けている。例えば、USP6,118,118に開示されているセンサー装置はベルト/モーターによって回転駆動されるレフレクターなどの可動部分、複雑な光学素子、およびビデオ処理素子を備えている。
一般的にいって、従来技術の場合、距離測定および/または複雑な信号解析処理を使用して、乳首位置を決定している。
本発明の一つの実施態様は、空間における物体を検出決定する装置において、センサー列からなり、このセンサー列における各センサーが照射ビームを空間に実質的に照射できるトランスミッター手段、および前記照射ビームと検出場との間の交差部において空間に検出ゾーンを生成するように前記センサー列内に配列されたレシーバー手段を有し、前記レシーバー手段が、前記照射ビームの前記物体により反射され、かつ前記検出ゾーン内の前記物体によって反射された反射ビームを受信できるとともに、前記レシーバー手段が前記検出ゾーン内にある前記物体からの前記反射ビームに応答して出力信号を発生でき、前記それぞれの検出ゾーン内の前記物体に実質的に同時に応答して、前記センサー列における前記受信手段のすべて、あるいは実質的にほぼすべてが出力信号を発生した時に、前記物体が空間において検出決定されることを特徴とする検出決定装置に関する。
本発明の別な実施態様は、以下のステップ、(a)空間における物体を検出決定する本発明装置を前記空間における物体の実質的な近傍位置である開始位置に移動させるステップ、(b)前記照射ビームを前記物体に照射するステップ、および(c)前記物体が前記センサー列内のすべての、あるいは実質的にすべての前記センサーの前記検出ゾーン内にくるまで、前記装置を前記開始位置から検査パターンで移動させることによって、前記検出ゾーン内の前記物体に応答して信号を発生するステップからなり、前記信号を使用して空間における前記物体を検出決定することを特徴とする空間における物体を検出決定する方法に関する。
本発明のさらに別な実施態様は、(a)多数の照射ビームを空間に照射し、(b)多数の検出場を空間に生成し、各検出場を一つの照射ビームと対にし、そして各検出場を検出ゾーンにおいてその対となる照射ビームと交差させて、多数の検出ゾーンを画定し、(c)多数の対となった検出ゾーンの一つかそれ以上の内部にある物体に応答して信号を発生し、そして(d)制御素子(controller)手段を使用して、前記の発生した信号に基づいて空間における前記物体の位置を決定することからなることを特徴とする空間における物体の検出決定方法に関する。
本発明のさらに別な実施態様は、(a)空間における物体を検出決定する本発明装置を被搾乳動物の乳首の実質的な近傍位置である開始位置に移動させ、(b)この乳首に照射ビームを照射し、(c)前記乳首が所定数の装置のすべての、あるいは実質的にすべてのセンサーの検出ゾーン内に来るまで前記装置を前記開始位置から検索パターンで移動させて、前記検出ゾーン内の前記乳首に応答して信号を発生し、(d)これら信号を使用して前記乳首の位置を求め、(e)この位置に向けて搾乳手段を移動させ、そして(f)前記乳首を前記搾乳手段に係合し、被搾乳動物の搾乳を行うことからなる搾乳方法に関する。
本発明のさらに別な実施態様は、(a)被搾乳動物の乳首に搾乳手段を自動的に、あるいは半自動的に接続する搾乳装置および(b)前記搾乳手段に対して前記乳首の位置を検出決定する一つかそれ以上の装置からなり、前記の一つかそれ以上の装置のそれぞれがセンサー列からなり、このセンサー列における各センサーが照射ビームを照射できるトランスミッター手段および空間内に検出場を画定できるレシーバー手段を有し、前記照射ビームと前記検出場との間の交差部において空間における検出ゾーンが生成されるように前記トランスミッター手段および前記レシーバー手段が配列され、前記レシーバー手段が、空間における前記検出ゾーン内の乳首に応答して信号を発生でき、そして前記センサー列内のすべてか、あるいは実質的にすべてのレシーバー手段がそれぞれの検出ゾーン内の乳首に実質的に同時に応答して信号を発生した時に前記乳首が検出されることを特徴とする搾乳システムに関する。
以下の詳細な説明により本発明をよりよく理解できるはずであり、また本発明の目的が明らかになるはずである。以下添付図面を参照して本発明を説明する。
なお、図示の本発明実施態様は、例示のみを目的としている。即ち、明細書の開示および添付図面は、明らかに例示のみを目的とし、理解の一助になるもので、本発明の範囲を限定するものではない。
本発明は、空間に存在する少なくとも1つの物体、例えば動物の乳首の位置を検出決定する検出装置、システムおよび/または方法である。本発明の実施態様は、一つかそれ以上の検出装置を有し、空間に存在する一つかそれ以上の物体を検出するために利用することができる。一つかそれ以上のセンサーを有するセンサー装置は、乳首の位置を決定するために利用することができる。各センサーは、トランスミッター/レシーバー対で構成することができる。各対内のトランスミッター/レシーバーは、オン/オフ信号からなる信号を使用して空間内の物体を検出できるように所定の角度で配設することができる。
特に断らない限り、本開示で使用する技術的用語、科学的用語はいずれも、本発明が属する分野において当業者が通常理解している意味と同じ意味をもつ。また、特許請求の範囲の記載を除いて特に断らない限り、“または(あるいは)”は、“および(そして)”などの意味を包含するものであり、逆も成立する。非制限的な用語術語も、特に断らない限り、あるいはそれ以外の明示がない限り、制限的な意味はない。(例えば、“含む”、“有する”および“構成する”といった表現は、通常、“制限することなく含有する”といった意味をもつ。)例えば、特に断らない限り、特許請求の範囲の記載などにおける単数表現は、複数表現や限定表現を含むものである。
本発明は一つの実施態様において、空間に存在する物体を検出決定する装置を提供するものである。この装置はセンサー列からなり、センサー列の各センサーは、照射ビームを照射できるトランスミッター手段、および空間に検出場を画定できるレシーバー手段を有していればよく、トランスミッター手段およびレシーバー手段は、空間内に検出ゾーンまたは検出容積を画定できるように配列すればよい。具体的には、トランスミッター手段およびレシーバー手段については、実質的に照射されたビームおよび検出場が、照射ビームと検出場との間の交差部に位置することができる、空間内の検出ゾーンまたは検出容積を画定できるように配置すればよい。実質的に照射された場合、照射ビームが空間内の物体に当たる。物体が検出ゾーンにある場合には、検出ゾーン内にある物体から反射した反射ビームを受け取り、これによって空間内の検出ゾーン内の物体に応答して信号を発生できる。本発明の一つの実施態様では、装置内のセンサー列は、空間内に多数の検出ゾーンを画定できるように構成すればよい。センサー列のすべての、あるいは実質的にすべてのレシーバーがそれぞれ検出ゾーン内の物体からの反射に実質的に同時に応答して信号を発生した時に物体が検出決定される。
本発明のセンサー装置の場合、センサー信号を処理する演算量は最少で済み、乳首の位置を決定できる。また、この装置は、酪農分野やその他の産業分野に使用してもその耐久性を十分に発揮することができる。
また、本発明の一実施態様の場合、2つかそれ以上のトランスミッター/レシーバー対からなり、各対のトランスミッターおよびレシーバーを空間内に検出ゾーンを画定できるように配設し、前記レシーバーがこの検出ゾーン内の物体に応答して信号を発生し、そしてセンサー列のすべての、あるいは実質的にすべてのレシーバーがそれぞれの検出ゾーン内に存在する物体に同時に応答して信号を発生した時に空間内において物体が検出決定されることを特徴とする空間における物体の検出決定装置を提供するものである。
前記レシーバー手段は、空間内の検出ゾーン内にある物体に応答して信号を発生するだけでもよい。この検出ゾーンは、レシーバー手段が照射ビームの物体からの反射を受け取り、これを検出できる場所またはゾーンとして定義することができる。トランスミッター手段からの光などの実質的に照射されたビームは物体に当たり、この物体を拡散的に検出し、反射ビームを発生する。物体が検出ゾーン内にある場合には、物体から反射したビームの一部がレシーバー手段によって検出され、信号の切り替え操作が開始する。物体が検出ゾーンにない場合には、反射ビームはレシーバー手段によって検出されない。受光および反射なしのこれら2つの状態を利用して、検出範囲内における物体の有無を決定することができる。このシステムの場合、十分な反射作用をもつ動物の乳首などの物体を検出することができる。反射作用が小さい(即ち、黒いマット粗面)をもつ物体の場合には、ショートレンジを対象とした、あるいは背景を抑制した拡散反射センサーを利用するほうがよい。次に、レシーバーが離散的なオン/オフ信号を発生し、受光された反射ビームの有無を示す。本発明の一つの実施態様の場合、例えば、信号は約ゼロボルト(オフ)デジタル信号か、あるいは約5ボルト(オン)デジタル信号であればよい。当業者ならば、この信号が論理的なデシジョンメーキングのための通信信号に過ぎないため、この信号の正確な性質が本発明にとって有意でないことを理解できるはずである。センサー列のすべての、あるいは実質的にすべてのレシーバー手段がそれぞれの検出ゾーン内にある物体に対して同時に応答して信号を発生した時に、物体を空間において特異的な位置をもつものとして確認することができる。
本発明は、空間において物体を検出決定する方法を含む実施態様を包摂するものである。この方法は少なくとも以下の3つのステップからなる。ステップ(a)で、空間における物体を検出決定する本発明装置を空間における物体の実質的な近傍位置である開始位置に移動させ、ステップ(b)で照射ビームを物体に照射し、そしてステップ(c)で検索パターンで開始位置からすべての、あるいは実質的にすべてのレシーバーが空間内のそれぞれの検出ゾーン内の物体に応答して信号を発生するまで本発明装置を移動させ、これによって空間における物体を検出決定する。
本発明の別な実施態様の場合、空間における物体の検出決定方法に以下のステップを付設する。即ち、ステップ(a)で空間に多数の照射ビームを照射し、ステップ(b)で空間に多数の検出場を画定し、各検出場が一つの照射ビームと対を構成し、各検出場が検出ゾーンにおいてその対を構成する照射ビームと交差し、これによって多数の検出ゾーンを画定し、ステップ(c)で所定数の対化(対になった)検出ゾーン(paired detection zones)のうち一つかそれ以上のゾーン内の物体に応答して信号を発生し、そしてステップ(d)で制御素子手段を使用して、発生信号に基づいて空間における物体を検出決定する。
本発明の一つの実施態様は、搾乳システムであって(a)被搾乳動物の乳首に乳首カップなどの搾乳手段を自動的に、あるいは半自動的に接続する搾乳装置および(b)前記搾乳手段に対して前記乳首の位置を検出決定するひとつかそれ以上の検出装置からなるシステムである。各検出装置がセンサー列からなり、このセンサー列における各センサーが照射ビームを空間に実質的に照射できるトランスミッター手段を有し、そして各センサーが空間内に検出場を画定できるレシーバー手段を有する。前記照射ビームと前記検出場との交差部において空間における検出ゾーンが形成されるように前記トランスミッター手段および前記レシーバー手段を配列する。前記レシーバー手段が、空間における前記検出ゾーン内の乳首に応答して信号を発生し、そして前記検出装置内のすべてか、あるいは実質的にすべてのレシーバーがそれぞれの検出ゾーン内の乳首に同時に応答して信号を発生した時点で搾乳手段における特定の空間において前記乳首が検出される時点とする。
本発明は、従来技術と比較して特異な作用効果を発揮できるものである。従来技術の場合には、よく知られているように複雑なセンサー、プロセッサーおよび/またはアルゴリズムを使用して、空間における物体を検出している。例えば一部の従来例では、距離測定および/または複雑な信号解析を使用して、乳首位置を決定している。本発明は、従来技術と比較して空間における物体を検出するために複雑なセンサー、プロセッサーまたはアルゴリズムを利用せず、またこれらを使用する必要もない作用効果がある。
さらに従来技術と比較した場合、本発明には、従来発明に利用されている回転鏡などの可動部、複雑な光学素子またはビデオ映像処理などを必要としない作用効果もある。本発明の場合には、物理的に耐久性が高く、酪農環境に特に好適なセンサーを利用することができる。本発明のセンサーは回転鏡などの可動部を利用せず、また複雑な光学素子またはビデオ映像処理も必要としない。
まず図1について説明する。本発明装置の例示的な実施態様は、(図示していない)ハウジング内に設けることができる2つ以上のセンサーからなるセンサー列10を備える。センサー列10内の各センサーはレシーバー手段3およびトランスミッター手段4から構成することができる。図1の概略図には、ちょうど4つのセンサー3/4、3a/4a、3b/4b、3c/4cを示す。当業者ならば、本発明の別な実施態様では、例えばセンサー数が2、3、4あるいは5以上のセンサー列も可能であることを認識できる。
照射ビーム6は、実質的に各トランスミッター手段4、4a、4b、4cから狭い幅で空間に照射することができる。センサー列の各レシーバー手段3、3a、3b、3cは、検出場5を画定することができる。各検出場は、各レシーバー手段が光線を射出するものと想定した場合、レシーバー手段から射出する光束の形状に対応する。ビーム6および検出場5は、それぞれ軸6cおよび5cにそって進む。ビーム6および検出場5はそれぞれ断面積が小さく、本発明装置10の検出ゾーン7とすることができる、所定の小さな検出場で相互交差する。この検出場5は、照射ビーム6に対して、例えば軸6cと5cとの間に角度αをもって設定配設し、空間内に検出ゾーン7または検出場7を形成できるようにすればよい。換言すれば、検出ゾーン7は、実質的にトランスミッター手段4から照射される照射ビーム6とレシーバー3の検出場5との交差部に画定することができる。トランスミッター手段とレシーバー手段との間のこの構成は、従来から“明確に限定された反射(definite reflective)”として知られている。これは、エミッタービーム経路およびレシーバービーム経路が空間における“明確に限定された”位置において交差することを意味する。そしてこの交差部が検出ゾーンまたは検出容積になる。
トランスミッター手段4から射出されたビームの一部は軸6cにそって進み、空間内の物体5に当たる。物体5が検出場7内にある場合には、このビームの一部が物体2から反射または散乱して戻り、レシーバー手段3に当たる。
各センサーについては、“n”個の検出ゾーンが空間内に画定されるように設けるか配列すればよい。本発明のこのような実施態様の場合、“n”個はセンサー列のセンサー数に等しい。例えば、本発明の一つの実施態様では、“n”個はセンサー数が2、3、または4以上を意味する。二次元において物体の位置を決定するためには、2つのセンサーがあれば十分である。この原理は、一つかそれ以上のレシーバー素子を利用すると三次元まで拡張することができる。図1において、本発明実施態様に使用されているように、トランスミッター手段およびレシーバー手段からなる一つの考えられる構成を示す。
さらに図1について説明を続けると、レシーバー手段3は、このレシーバー手段3の検出ゾーン7内にある物体2に応答して“オン”信号または“オフ”信号を出力、あるいは発生することができる。(動物の乳房1に位置することがある)動物の乳首などの物体2が検出ゾーン7に交差して入ると、物体2に接触している照射ビーム6の反射信号がレシーバー手段3によって受信される。即ち、レシーバー手段3の出力が低出力から高出力に変化し、この逆の変化もあり得る。本発明装置のすべての、あるいは実質的にすべてのレシーバー手段が反射信号を受信した時点が、物体2の検出時点になる。
各センサー(即ち、トランスミッター/レシーバー対)はさらにエミッタービームまたはレシーバービームを合焦することができるレンズ、およびセンサーの光源およびデシジョンメーキング機能を有することができる増幅器を有する。
トランスミッター手段(transmitter means)としては、ファイバー光学トランスミッターを使用することができ、照射ビームの光源を設けることができる遠隔位置からビームを照射することができる。レシーバー手段にも、ファイバー光学素子を介して反射信号を遠隔地のレシーバーに送信することができるファイバー光学レシーバー手段を使用することができる。なお、図1に示す本発明の実施態様では、トランスミッター手段4およびレシーバー手段3として示す構成成分はそれぞれビームがトランスミッターから射出する点および反射ビームがレシーバーによって受光される点を表すが、実際のレシーバー手段および/またはトランスミッター手段を表しているわけではない。このような本発明の実施態様では、トランスミッター手段およびレシーバー手段はセンサー列10から離れた距離に設けることができる。
センサーにおける照射ビームと検出場との間の角度αは、異なる検出場(zones of detection)に合わせて調節することができる。本発明のこの点に関する操作性を高くするために、センサー内におけるトランスミッター手段およびレシーバー手段の形状および位置はセンサー列内で変更可能である。センサー列は周辺部分と中心部分とを有する。図1にセンサー列10におけるセンサーの一つの考えられる構成を示す。この場合、図1に示すように、トランスミッター手段4、4a、4b、および4cは実質的にセンサー列10の中心部に配置することができ、そしてレシーバー手段3、3a、3b、および3cはセンサー列10の周辺部に配置することができる。あるいは、トランスミッター手段をセンサー列の周辺部に設けてもよく、レシーバー手段が占めていた位置に設けられることになる。このように、トランスミッター手段およびレシーバー手段は位置を交換することができる。
本発明の一つの実施態様の場合、トランスミッター/レシーバー対は相互の経路(path)が交差する。本発明の別な実施態様では、トランスミッター/レシーバー対はセンサー列の各角部(コーナー)に個別に設けることができる。当業者ならば、トランスミッター/レシーバー対が検出対象の物体を検出することができる検出ゾーンまたは容積を形成できる限り、センサー列内のトランスミッターおよびレシーバーの構成は任意の形態を取ることができることを認識できるはずである。
図2A、図2Bおよび図2Cは、センサーをセンサー列20に配列し、トランスミッター/レシーバー対をパターン中心線(pattern centre line)25の周りに設けさらに別な方法を示す図である。即ち、図2Aおよび図2Cは、中心軸28を中心にして配列したセンサー列を示す横面図であり、そして図2Bは、図2Aおよび図2Cのセンサー列20を示す上面図である。なお、センサー列は基底面(base plane)に設けることも可能であり、中心軸28はセンサー列20の中心に位置決めしてもよく、また基底面に対して垂直ないし鉛直構成(perpendicular to the base plane)でもよい。センサー列20のトランスミッター/レシーバー対21a/21b、22a/22b、23a/23b、24a/24bはセンサー列20の中心に実質的に向かって “傾いて”いてもよく、この場合には照射および検出場がセンサー列20の中心軸28上に設けられる中心面に交差するため、対応する検出容積が対応するセンサー対から中心面の反対側に位置することになる。図2Cについてさらに説明すると、図示のトランスミッター/レシーバー対23a/23bは、照射および検出場が、中心面に交差し、中心面の反対側に位置する検出容積37を形成する。センサー列20のセンサーについては、円25を実質的に形成するように配列することができるため、このセンサー列の全直径を図1に示す本発明実施態様のセンサー列よりも小さくすることができる。
図2A、図2Bおよび図2Cに示したセンサー列の構成は、特に有利である。例えば、図2A、図2Bおよび図2Cに示したセンサー列はスペースを全体的に節約できるため、カップ同士の干渉を小さくするために有利である。さらに、センサーが取る実質的に円形なパターンは、その中心に開放位置26を残すため、さらに別なセンサー、ディップスプレー処理後ノズルやレンズ取り付けホールなどを受け取るために使用することができる。
図2Cに、照射手段(transmission means)23a、レシーバー手段23b、および検出容積37を有するセンサーを示す図である。検出容積37は、照射手段23aおよびレシーバー手段23bが形成するセンサーの反対側に設けることができる。
本発明の一つの実施態様では、照射ビームの軸と検出場の軸との間の角度αは、約10°〜約80°であればよく、または別な実施態様では、10°未満の角度および80°よりも大きい角度であればよい。
角度αが小さくなると、トランスミッターの主軸に対して距離解像度が低くなり、または角度αが大きくなると、センサー内のトランスミッターとレシーバーとの距離を大きく取る必要が出てくる。
本発明の一つの実施態様では、角度αは約30°〜約40°であればよい。この角度範囲は、距離解像度にとって許容可能な範囲であり、この範囲にある限り、トランスミッターとレシーバーとの距離が大きくなり過ぎ、センサーブロック体が過度に大きくなることはない。本発明の別な実施態様では、角度αは約33.5°であればよい。
トランスミッターとレシーバーとがブロック体に一体化された一体化センサーは市場で入手することが可能である。角度範囲が5°〜90°のセンサーが入手可能である。現在市場に出ている一体化センサーは、一般的に、小さなハウジングからなるため、本発明において必要な解像度および角度範囲の両者を満足できない。さらに、市場に出回っているセンサーの場合、多数のトランスミッター/レシーバー対は指向性情報を得るように指向化されていない。当業者ならば、本発明のセンサーによれば、従来技術センサーと比較した場合に、空間における物体を検出できる効果作用を実現できることを認識できるはずである。また、本発明の装置の場合、個別な2つのレンズを使用して、これらをエミッター/レシーバー対(即ちセンサー)として機能させ、これによって指向性情報を得ることのできる正確な構成をもって特異的な構成を実現することができる。本発明のシステムの場合、このような対を2つ以上、例えば4つのトランスミッター/レシーバー対をハウジング内に装着することができる。
本発明では、各種のビーム光源を利用することが可能である。例示すると、可視光、赤外光、レーザー、超音波である。本発明の一つの実施態様では、センサーには可視赤色光を利用することができる。例えば、本発明に利用するセンサーとしてはKeyenceTMブランドセンサーを使用することが可能である。このセンサーの場合、光ファイバーラインによってレンズに可視赤色光を照射し、次にこのレンズが照射ビーム幅をほぼ2°〜4°にする。
トランスミッターから照射されたビームが取る経路にそって、あるいは経路間での干渉を避けるためには、あるいはこれを最小限に抑えるためには、本発明では多数の非相互的な専用の手段(non−mutually exclusive measures)を取ることができる。本発明の一つの実施態様では、センサー列内にセンサーを配列して、ビームが妨害的に干渉することを防止する。本発明の別な実施態様では、センサー列内のトランスミッターが実質的に発光するビームを変調して、センサー列内の各レシーバーが、センサー内の対応するトランスミッターからの信号のみを検出できるように設定する。本発明のさらに別な実施態様では、トランスミッターの照射周波数を相互に変え、各レシーバーをその対応するトランスミッターの周波数に同調させる。本発明のさらに別な実施態様では、トランスミッターの照射振幅も変える。当業者ならば、本発明はこれら以外の実施態様でも実施可能であり、また本発明の実施態様では、以上説明してきた手段の2つ以上を組み合わせて利用することも可能であることを認識できるはずである。
本発明で利用するセンサーの型式に関係なく、トランスミッターによって発生する照射ビームは狭ビームであればよい。例えば、トランスミッターが照射するビームは、狭範囲に狭めたビームであればよい。狭ビームを使用すると、本発明の操作性が向上する。本発明の一つの実施態様では、ビーム幅は、約0°〜約10°であればよく、本発明の別な実施態様では、狭ビームは約0°〜約4°であればよい。理想をいえば、ビーム幅はできるだけゼロに近いほうがよいが、ビーム幅の好適な操作範囲は2°〜4°である。当業者ならば、例えば10°までのビーム幅などの比較的広いビーム幅範囲でも本発明は実施可能であることを認識できるはずである。
本発明装置の一つの重要な用途は、例えば乳牛の乳首などの動物の乳首を検出することである。動物の一つ以上の乳首を検出する主目的は、例えば乳首カップなどの搾乳装置を動物に装着することである。当業者ならば、本発明は、洗浄処理、浸漬前処理、浸漬後処理、あるいは動物乳首の位置を検出する必要のあるその他の処理を行うために乳首を検出するためにも利用できることを認識できるはずである。
動物を対象として本発明を利用する場合、本発明は乳牛の乳首を検出ために使用することができる。当業者ならば、例えばヤギ、水牛やその他の搾乳動物などの乳牛以外の動物の乳首を検出するためにも本発明を利用できることを認識できるはずである。
本発明の各装置は、動物の乳首の一つを検出できるように設計することができる。なお、本発明の一つの実施態様は、本明細書で説明した2つかそれ以上の検出装置を有し、これによって動物の2つ以上の乳首を検出する。各検出装置はセンサー列からなり、各センサーは、本明細書で説明したトランスシーバー/レシーバー対から構成することができる。また、各検出装置は動物の乳首の一つを検出できる。例えば、本発明のこのような実施態様を乳牛などの乳首数が4の動物に適用した場合、使用する検出装置数は最大4であり、4以下の各検出装置がそれぞれ一つの乳首を検出する。即ち、本発明のこの実施態様の第1検出装置は、乳牛の第1乳首を検出するために使用でき、本発明のこの実施態様の第2検出装置は、乳牛の第2乳首を検出するために使用でき、本発明のこの実施態様の第3検出装置は、乳牛の第3乳首を検出するために使用でき、本発明のこの実施態様の第4検出装置は、乳牛の第4乳首を検出するために使用できる。
本発明の別な実施態様では、本発明の一つかそれ以上の検出装置を利用して、空間内における多数の物体を検出装置に対して検出することができる。本発明の一つの具体的な実施態様において使用する検出装置の個数は、空間における物体数に対応させることができる。空間において一つの物体を検出する必要がある場合、一つの検出装置を備えた本発明の実施態様を使用することができ、空間において2つ以上の物体、例えば乳牛の乳房にある2つ以上の乳首、あるいは複数の物体を有する複数組を検出する必要がある場合、2つ以上の検出装置を備えた本発明の実施態様を使用することができる。従って、本発明の実施態様では、一つか、それ以上の検出装置からなる多数の検出装置を使用することができる。
一つかそれ以上の検出装置を備えた本発明の実施態様は、搾乳動物を搾乳するシステムの要部としても利用することができる。例えば、本発明の一つの実施態様を利用した動物の搾乳システムは、(a)搾乳対象の動物の一つかそれ以上の乳首に乳首カップなどの搾乳手段を自動的に、あるいは半自動的に接続する搾乳装置、および(b)それぞれが搾乳対象の動物の一つの乳首の位置を検出決定する一つかそれ以上の本発明装置からなる。検出装置が一つかそれ以上の乳首の位置を検出し、そして搾乳装置が動物の検出された一つかそれ以上の乳首それぞれに乳首カップを自動的に、あるいは半自動的に接続する。従って、検出装置が一つかそれ以上の乳首の位置に関する情報、あるいはその他の形態の指示を発生し、伝達する。搾乳装置が伝達された情報またはその他の形態の情報を利用して、乳首カップを接続すべき一つかそれ以上の乳首の位置を決定する。乳首に乳首カップが装着されると、搾乳装置が機能して、動物をよく知られた方法で搾乳する。一つの実施態様の場合、搾乳動物の搾乳装置はモジュラー式装置であればよく、この装置は主支持体、主支持体に連結された所定数の独立したモジュラーアーム(例えば、乳牛の搾乳の場合には4本のモジュラーアーム、あるいはヤギの搾乳の場合には2本のモジュラーアーム)、および各モジュラーアームのそれぞれに回動自在に連結されたアームツール(“EOAT”)の端部から構成することができる。一つのこのようなモジュラー式搾乳装置は、本出願人による米国優先特許出願第61/351,687号に開示され、この開示は本明細書に援用するものとする。
本発明の検出装置は、EOATに組み込むことができる。モジュラーアームが実質的にZ方向、Y方向およびX方向に移動できるため、動物の乳首を走査でき、動物下部位置にEOATを位置決めすることができる。
本発明の一つの実施態様の場合、センサーの増幅器内のデジタル信号プロセッサーがレシーバーからの信号を処理し、離散的なオン/オフ信号出力をもってデシジョンメーキング制御素子に応答する。コンピュータやプログラム式ロジック制御素子(PLC)などの制御素子が、本発明の一つの実施態様における一つかそれ以上の検出装置のレシーバーのうち一つかそれ以上の出力を受け取り、これを利用する。検出装置は、一つの装置でもよく、あるいは2つかそれ以上の検出装置からなる装置列でもよい。一つかそれ以上の検出装置を空間において移動させ、空間において検出すべき一つかそれ以上の物体を検出する必要がある位置に関するロジックデシジョンを下すか、決定する過程で前記出力が制御素子、コンピュータまたはPLCによって使用される。本発明の実施態様では、制御素子、コンピュータまたはPLCはさらに一つかそれ以上の検出装置それぞれの各センサーの角度または目的を決定し、本発明によって空間における一つかそれ以上の物体を有効に、効率的におよび/または迅速に検出できるように構成する。
制御素子によって、一つかそれ以上の検出装置が、好ましくは一つかそれ以上の検出装置それぞれが備えたすべてのレシーバーから信号を発生するように移動し、一つかそれ以上の物体を検出する。レシーバーのいずれもが信号を検出しない場合には、制御素子によって検出装置が、例えば検索パターンで移動し、検出の可能性を高くする。レシーバーのうち一つかそれ以上が信号を受信すると、好ましくはすべてのレシーバーが信号を獲得するまで、レシーバーからの入力に基づいて制御素子によって検出装置が移動する。なお、ここでいう“信号”とは、物体がセンサーの検出ゾーンに入ったことを示す“オン”信号または“オフ”信号を意味する。
別な実施例として、対象動物が小さな、あるいは不規則な乳首をもつ場合には、制御素子は、信号を獲得するためにすべてのセンサーに頼る必要はない。乳首に大小がある場合には、制御素子によって検出装置がX−Y方向に移動し、そして制御素子が乳首からのオン/オフ信号を使用して、X−Y方向における乳首の大きさを実質的に決定する。X−Y方向における乳首の大きさを決定するさい、決定操作は一回でもよく、あるいはX方向およびY方向において複数回決定操作を行ってから、制御素子によって、例えば乳房の不規則性からの誤信号にもかかわらず小さな乳首を検出する。当業者ならば、乳首以外の物体を空間において検出するためにも同様なプロセスを利用できることを認識できるはずである。
本発明の一つの実施態様において使用することができる空間における物体の検出決定方法は、以下のステップからなる。
(a)本発明の一つかそれ以上の検出装置を開始位置まで移動させるステップ。なお、本発明の一部の実施態様の場合、一つかそれ以上の検出装置それぞれの開始位置は、空間において検出すべき一つかそれ以上の物体のうちの一つの実質的に近傍にあればよい。
(b)狭ビームとして一つかそれ以上の照射ビームを照射するステップ。検出ゾーンは、照射ビームと検出場との交差部に形成すればよい。
(c)検出ゾーン内の一つかそれ以上の物体それぞれから信号を発生し、この信号に基づいて検出された物体それぞれの位置を識別するステップ。
(a)本発明の一つかそれ以上の検出装置を開始位置まで移動させるステップ。なお、本発明の一部の実施態様の場合、一つかそれ以上の検出装置それぞれの開始位置は、空間において検出すべき一つかそれ以上の物体のうちの一つの実質的に近傍にあればよい。
(b)狭ビームとして一つかそれ以上の照射ビームを照射するステップ。検出ゾーンは、照射ビームと検出場との交差部に形成すればよい。
(c)検出ゾーン内の一つかそれ以上の物体それぞれから信号を発生し、この信号に基づいて検出された物体それぞれの位置を識別するステップ。
本発明方法には、使用する本発明の実施態様に従って前記以外のステップを付設してもよい。例えば、本発明の方法では、以下のステップのうち任意のステップを利用することができる。
(d)検出された物体それぞれの位置に関する情報、データまたはその他の形態の指示を制御素子、コンピュータ、PLCなどの別なソース、あるいは例えば搾乳装置などの装置、素子や機器に伝達するステップ。
(e)伝達された情報を使用して、空間において検出された物体に接触させる装置、素子または機器の構成要素の位置を決定するか、あるいは決定された位置において空間における物体を利用するステップ。
(c)検出装置が空間における物体を検出できない場合には、検出装置のすべての、あるいは実質的にすべてのレシーバーが、空間における検出ゾーン内の物体に応答して信号を出力するまで、検出装置を開始位置から例えば検索パターンで別な位置に移動させ、これによって空間における物体を検出するステップ。
(d)検出された物体それぞれの位置に関する情報、データまたはその他の形態の指示を制御素子、コンピュータ、PLCなどの別なソース、あるいは例えば搾乳装置などの装置、素子や機器に伝達するステップ。
(e)伝達された情報を使用して、空間において検出された物体に接触させる装置、素子または機器の構成要素の位置を決定するか、あるいは決定された位置において空間における物体を利用するステップ。
(c)検出装置が空間における物体を検出できない場合には、検出装置のすべての、あるいは実質的にすべてのレシーバーが、空間における検出ゾーン内の物体に応答して信号を出力するまで、検出装置を開始位置から例えば検索パターンで別な位置に移動させ、これによって空間における物体を検出するステップ。
当業者ならば、本発明の利用方法または応用方法には、前記以外のステップを付設できることを認識できるはずである。
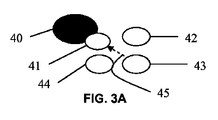
空間における物体が動物の乳首である本発明の利用方法の一つの実施態様の実施例について、図3に示す動物乳首を参照して以下説明する。図3において、(黒円で示す)動物40の乳首は、一つかそれ以上の検出ゾーン41〜44(白い楕円で示す各センサーの検出ゾーン)を有するセンサーによって検出することができる。図3に示すように、動物の乳首に対して利用することができる本発明の一つの実施態様である方法は以下のステップからなり、そしてこれらステップは、本発明の一つの実施態様に包摂される一つかそれ以上の検出装置それぞれに適用することができる。
(a)検出装置を開始位置に移動させ、動物乳首の一つを検出するステップ。なお、開始位置は、乳首が検出された位置に実質的に密接した、あるいは実質的にその近傍の位置であればよい。
(b)検出ゾーン内の乳首に応答して発生した信号などの信号が、検出ゾーン内の乳首に応答して受信された場合に、センサーをトリガーするステップ。
(d)乳首が検出されず、かつ検出装置のセンサーのいずれもトリガーされない場合には、検出装置を開始位置から別な位置に移動させるステップ。例えば、検出装置は、検索パターンでの移動、XY座標に沿う移動やZ方向移動などの各種の移動方法で移動させることができる。また、各種の移動を組み合わせて移動を行ってもよい。センサー列のセンサーの少なくとも一つが信号を受信するまで、この操作を反復することができる。
(e)例えば、図3Aに示すように検出ゾーン41を画定するセンサーなどのセンサー列内の少なくとも一つのセンサーがトリガーされると、検出装置がセンサー列からなる場合には、検出装置が他のセンサーから信号を受信する方向に移動する。例えば、検出ゾーン41が乳首40の範囲に入り、そして出力信号が発生した場合には、この検出装置は、検出ゾーン42、43および/または44を画定するセンサーなどの他のセンサーも出力を受け取り、トリガーされる方向に実質的に移動する。図3Aに示す構成の場合、検出装置は、破線矢印45の方向に検出ゾーン41、43を結ぶ線にそって移動するため、検出ゾーン44を画定するセンサーの位置が決まる。
(f)検出ゾーン41、44を画定するセンサーが信号を受け取ることができる図3Bに示すセンサーの位置決めのさいに生じるように、2つのセンサーが信号を受信すると、出力信号を発信して検出装置をトリガーした破線矢印46によって示すように、好ましくは2つのトリガーされたセンサーの検出ゾーンに対して実質的に垂直な方向に検出装置が移動するステップ。
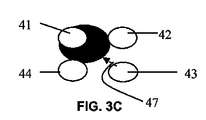
(g)検出ゾーン41、42、44を画定するセンサーが信号を受信する図3Cに示すセンサーの位置決めのさいに生じるように、ある3つのセンサーが信号を受信すると、乳首の位置が決定されたとのデシジョンが下されるステップ(例えば乳首が小さい動物や乳首が不規則な動物の場合、制御素子がすべてのセンサーに頼らずに信号を獲得し、乳首の位置を識別することができる)。
(h)あるいは、検出装置の第4センサーから信号を得ることができる方向に検出装置を移動させるステップ。場合によっては、移動方向は、矢印47で示す、出力を与えているセンサーの2つの角部検出ゾーンに対して実質的に垂直なラインに沿う方向であればよい。一例として図3Cに示すように、2つの角部検出ゾーンは42、44である。図3Dは、信号を受信するセンサーすべてを含む検出ゾーン41−44の位置決めを示す図である。検出装置のすべてのセンサーから信号が得られると、乳首の位置を識別することができる。
(i)任意の点で、例えば動物の動きによりセンサーのうちいずれかがその信号を失った場合には、信号を失った最後のセンサーを考慮することによって、制御素子が乳首を発見する試みを行うステップ。これは、乳首がその方向に“逸れる”可能性があるからである。
(j)あるいは、任意の点で、例えば動物の動きによりセンサーのうちいずれかがその信号を失った場合には、制御素子によって開始ステップ(a)および以降の任意のステップからなるプロセスを反復し、乳首の位置を再度獲得するステップ。
(a)検出装置を開始位置に移動させ、動物乳首の一つを検出するステップ。なお、開始位置は、乳首が検出された位置に実質的に密接した、あるいは実質的にその近傍の位置であればよい。
(b)検出ゾーン内の乳首に応答して発生した信号などの信号が、検出ゾーン内の乳首に応答して受信された場合に、センサーをトリガーするステップ。
(d)乳首が検出されず、かつ検出装置のセンサーのいずれもトリガーされない場合には、検出装置を開始位置から別な位置に移動させるステップ。例えば、検出装置は、検索パターンでの移動、XY座標に沿う移動やZ方向移動などの各種の移動方法で移動させることができる。また、各種の移動を組み合わせて移動を行ってもよい。センサー列のセンサーの少なくとも一つが信号を受信するまで、この操作を反復することができる。
(e)例えば、図3Aに示すように検出ゾーン41を画定するセンサーなどのセンサー列内の少なくとも一つのセンサーがトリガーされると、検出装置がセンサー列からなる場合には、検出装置が他のセンサーから信号を受信する方向に移動する。例えば、検出ゾーン41が乳首40の範囲に入り、そして出力信号が発生した場合には、この検出装置は、検出ゾーン42、43および/または44を画定するセンサーなどの他のセンサーも出力を受け取り、トリガーされる方向に実質的に移動する。図3Aに示す構成の場合、検出装置は、破線矢印45の方向に検出ゾーン41、43を結ぶ線にそって移動するため、検出ゾーン44を画定するセンサーの位置が決まる。
(f)検出ゾーン41、44を画定するセンサーが信号を受け取ることができる図3Bに示すセンサーの位置決めのさいに生じるように、2つのセンサーが信号を受信すると、出力信号を発信して検出装置をトリガーした破線矢印46によって示すように、好ましくは2つのトリガーされたセンサーの検出ゾーンに対して実質的に垂直な方向に検出装置が移動するステップ。
(g)検出ゾーン41、42、44を画定するセンサーが信号を受信する図3Cに示すセンサーの位置決めのさいに生じるように、ある3つのセンサーが信号を受信すると、乳首の位置が決定されたとのデシジョンが下されるステップ(例えば乳首が小さい動物や乳首が不規則な動物の場合、制御素子がすべてのセンサーに頼らずに信号を獲得し、乳首の位置を識別することができる)。
(h)あるいは、検出装置の第4センサーから信号を得ることができる方向に検出装置を移動させるステップ。場合によっては、移動方向は、矢印47で示す、出力を与えているセンサーの2つの角部検出ゾーンに対して実質的に垂直なラインに沿う方向であればよい。一例として図3Cに示すように、2つの角部検出ゾーンは42、44である。図3Dは、信号を受信するセンサーすべてを含む検出ゾーン41−44の位置決めを示す図である。検出装置のすべてのセンサーから信号が得られると、乳首の位置を識別することができる。
(i)任意の点で、例えば動物の動きによりセンサーのうちいずれかがその信号を失った場合には、信号を失った最後のセンサーを考慮することによって、制御素子が乳首を発見する試みを行うステップ。これは、乳首がその方向に“逸れる”可能性があるからである。
(j)あるいは、任意の点で、例えば動物の動きによりセンサーのうちいずれかがその信号を失った場合には、制御素子によって開始ステップ(a)および以降の任意のステップからなるプロセスを反復し、乳首の位置を再度獲得するステップ。
検索パターンは、前記のパターンに限定されず、動物の乳首を検出決定する他の適当な形態の検索を含むものである。例えば、検索パターンは、開始位置から螺旋状パターンとして外側に向かう検索パターンの形を取ってもよく、実質的に曲線状(ドーム状、アーチ状)の形態を取ることも可能であり、異なる形態の検索パターンを組み合わせて使用してもよい。当業者ならば、本発明を実施するさいに、各種の検索パターンを利用できることを認識できるはずである。
本発明の装置は、任意の好適な装置によって移動させることが可能である。例えば、本発明装置は前記のモジュラー式搾乳装置のEOATに組み込むことができる。
本発明の空間における物体を検出決定する装置により動物の乳首の位置を識別した後は、乳首カップなどの搾乳装置を(i)検出決定された乳首に向かう方向に移動し、(ii)動物の乳首に装着し、そして(iii)実質的に動物を搾乳する。例えば、前記のモジュラー式搾乳装置の場合、乳牛の搾乳方法は、
1.開始位置において、モジュラーアームおよびEOATを回転することによって搾乳装置のEOATに設けた本発明装置のセンサー列を移動させ、乳首位置を探すために走査を行う。
2.アームのセンサー列によって乳首を検出決定した後は、搾乳装置のアームによって乳首カップを検出決定された乳首に装着して搾乳を行う。
1.開始位置において、モジュラーアームおよびEOATを回転することによって搾乳装置のEOATに設けた本発明装置のセンサー列を移動させ、乳首位置を探すために走査を行う。
2.アームのセンサー列によって乳首を検出決定した後は、搾乳装置のアームによって乳首カップを検出決定された乳首に装着して搾乳を行う。
乳首カップは、真空化することができる搾乳ラインに接続することができる。真空搾乳ラインが、適切な乳首カップから放出されたミルクを受け取り、これをさらに処理加工する。
以上前記の説明は、本発明の全体に関するもので、状況に応じて、あるいは都合に応じて、形態を変更することができ、等価物と代替してもよい。本明細書では特異的な用語を使用したが、いずれも説明的な意味の用語であり、制限の意図はない。以前記述した以外の実施態様でも本発明は実施可能である。これらはいずれも特許請求の範囲に記載された発明の範囲に包摂されるものと考えられる。
2:物体
3:レシーバー手段
4:トランスミッター手段
5:検出場
6:照射ビーム
7:検出ゾーン
10:センサー列
3:レシーバー手段
4:トランスミッター手段
5:検出場
6:照射ビーム
7:検出ゾーン
10:センサー列
Claims (23)
- 空間における物体を検出決定する装置において、センサー列からなり、このセンサー列における各センサーが照射ビームを空間に実質的に照射できるトランスミッター手段、および空間において検出場を画定できるレシーバー手段、および前記照射ビームと検出場との間の交差部において空間に検出ゾーンを形成するように前記センサー列内に配列された前記トランスミッター手段および前記レシーバー手段を有し、前記レシーバー手段が、前記照射ビームの前記物体により反射され、かつ前記検出ゾーン内の前記物体によって反射された照射ビームを受信できるとともに、前記レシーバー手段が前記検出ゾーン内にある前記物体からの前記反射ビームに応答して出力信号を発生でき、前記それぞれの検出ゾーン内の前記物体に実質的に同時に応答して、前記センサー列における前記受信手段のすべて、あるいは実質的にほぼすべてが出力信号を発生した時に前記物体が空間において検出決定されることを特徴とする検出決定装置。
- 前記照射ビームが、狭い幅のビームである請求項1に記載の装置。
- 前記照射ビームが、約0°〜約10°の幅を有する請求項1に記載の装置。
- 前記照射ビームが、可視光ビーム、赤外光ビームまたはレーザービームである請求項2に記載の装置。
- 前記レシーバー手段が、受光光電素子である請求項4に記載の装置。
- 前記照射ビームが超音波ビームで、そして前記レシーバー手段が超音波受信素子である請求項2に記載の装置。
- 前記照射ビームが第1軸にそって進行し、前記検出場が第2軸にそって画定され、そして前記第1軸と前記第2軸とがなす角度が約10°〜約80°である請求項1に記載の装置。
- 前記トランスミッター手段が前記センサー列の中心部に配列され、そして前記レシーバー手段が前記センサー列の周辺部でかつ前記トランスミッター手段の周囲に配列された請求項1に記載の装置。
- 前記レシーバー手段が前記センサー列の中心部に配列され、そして前記トランスミッター手段が前記センサー列の周辺部でかつ前記レシーバー手段の周囲に配列された請求項1に記載の装置。
- 前記トランスミッター手段および前記レシーバー手段が、基底面に対して垂直な中心軸の周囲において前記センサー列の前記基底面に配列された請求項1に記載の装置。
- 各センサーの前記トランスミッター手段および前記レシーバー手段が、前記基底面に対して垂直な中心面の同じ側に設けられ、そして前記トランスミッター手段および前記レシーバー手段が、前記中心面に向かって実質的に傾斜するように位置決めされ、前記トランスミッター手段および前記レシーバー手段の前記第1軸および第2軸が前記中心面と交差し、対応する検出ゾーンが前記中心面の反対側に設けられる請求項10に記載の装置。
- さらに、前記レシーバー手段からの出力信号に応答して作動する演算手段を有する請求項1に記載の装置。
- さらに、前記センサー列を収めるハウジングを有する請求項1に記載の装置。
- 前記物体が、搾乳動物の乳首である請求項1に記載の装置。
- 所定数のセンサー列を有し、これらセンサー列の個数が前記搾乳動物の乳首数に対応する請求項14に記載の装置。
- 前記搾乳動物が乳牛であり、前記装置が4つのセンサー列を有する請求項14に記載の装置。
- 空間における物体を検出決定する方法であって、(a)請求項1の装置を前記空間における物体の実質的な近傍位置である開始位置に移動させるステップ、(b)前記照射ビームを前記物体に照射するステップ、および(c)前記物体が前記センサー列内のすべての、あるいは実質的にすべての前記センサーの前記検出ゾーン内にくるまで、前記装置を前記開始位置から検査パターンで移動させることによって、前記検出ゾーン内の前記物体に応答して信号を発生するステップからなり、前記信号を使用して空間における前記物体を検出決定することを特徴とする空間における物体を検出決定する方法。
- さらに、前記信号をコンピュータ手段に伝達することからなる請求項17に記載の方法。
- 前記演算手段が、前記信号に基づいて前記装置の動きを制御できる請求項18に記載の方法。
- 前記演算手段が、前記信号に基づいてある装置の出力を制御できる請求項18に記載の方法。
- 前記のある装置が、搾乳装置である請求項20に記載の方法。
- (a)請求項1の装置を被搾乳動物の乳首の実質的な近傍位置である開始位置に移動させ、
(b)空間に照射ビームを照射し、
(c)前記乳首が所定数の装置のすべての、あるいは実質的にすべてのセンサーの検出ゾーン内に来るまで前記装置を前記開始位置から検索パターンで移動させて、前記検出ゾーン内の前記乳首の数に応答して信号を発生し、
(d)これら信号を使用して前記乳首の位置を求め、
(e)この位置に向けて搾乳手段を移動させ、そして
(f)前記乳首を前記搾乳手段に係合し、動物の搾乳を行うことからなることを特徴とする搾乳方法。
- (a)被搾乳動物の乳首に搾乳手段を自動的に、あるいは半自動的に接続する搾乳装置および(b)前記搾乳手段に対して前記乳首の位置を検出決定する一つかそれ以上の装置からなり、前記の一つかそれ以上の装置のそれぞれがセンサー列からなり、このセンサー列における各センサーが照射ビームを照射できるトランスミッター手段および空間において検出場を画定できるレシーバー手段を有し、前記照射ビームと前記検出場との交差部において空間における検出ゾーンが形成されるように前記トランスミッター手段および前記レシーバー手段が配列され、前記レシーバー手段が、空間における前記検出ゾーン内の乳首からの反射ビームに応答して信号を発生でき、そして前記センサー列内のすべてか、あるいは実質的にすべてのレシーバー手段がそれぞれの検出ゾーン内の乳首に実質的に同時に応答して信号を発生した時に前記乳首が検出されることを特徴とする搾乳システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US34501110P | 2010-05-14 | 2010-05-14 | |
| US61/345,011 | 2010-05-14 | ||
| US35168710P | 2010-06-04 | 2010-06-04 | |
| US61/351,687 | 2010-06-04 | ||
| PCT/US2011/036524 WO2011143616A1 (en) | 2010-05-14 | 2011-05-13 | Sensor array for locating an object in space |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013530392A true JP2013530392A (ja) | 2013-07-25 |
| JP2013530392A5 JP2013530392A5 (ja) | 2014-06-26 |
Family
ID=44914737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013510351A Withdrawn JP2013530392A (ja) | 2010-05-14 | 2011-05-13 | 空間における物体を検出決定するセンサー装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9119372B2 (ja) |
| EP (1) | EP2568800A1 (ja) |
| JP (1) | JP2013530392A (ja) |
| KR (1) | KR20130115093A (ja) |
| AU (1) | AU2011252843A1 (ja) |
| CA (1) | CA2799358C (ja) |
| NZ (1) | NZ603410A (ja) |
| WO (1) | WO2011143616A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130115205A (ko) | 2010-06-04 | 2013-10-21 | 데어리 체크, 인코포레이티드. | 모듈형 조작 장치 |
| US10499609B2 (en) * | 2016-08-17 | 2019-12-10 | Technologies Holdings Corp. | Vision system for teat detection |
| US10349615B2 (en) * | 2016-08-17 | 2019-07-16 | Technologies Holdings Corp. | Vision system for teat detection |
| US10349613B2 (en) * | 2016-08-17 | 2019-07-16 | Technologies Holdings Corp. | Vision system for teat detection |
| KR102044851B1 (ko) * | 2018-06-29 | 2019-11-13 | 대한민국(농촌진흥청장) | 유두인식장치가 부착된 착유컵 그립퍼 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE428250B (sv) * | 1979-05-31 | 1983-06-13 | Bert Jonsson | Fotoelektrisk anordning for avkenning av foremal |
| NL8502434A (nl) * | 1985-09-04 | 1987-04-01 | Multinorm Bv | Melkinrichting. |
| NL8503580A (nl) * | 1985-12-27 | 1987-07-16 | Multinorm Bv | Systeem voor het besturen van een orgaan voor het volgen van een bewegend object. |
| DE68928724T2 (de) | 1988-01-08 | 1998-11-05 | Prolion Bv | Verfahren und Robotsystem zum Suchen eines bewegenden Objekts |
| NL8802332A (nl) * | 1988-09-21 | 1990-04-17 | Lely Nv C Van Der | Inrichting voor het melken van een dier. |
| SE9503792D0 (sv) * | 1995-10-27 | 1995-10-27 | Tetra Laval Holdings & Finance | Teat location for milking |
| NL1001912C2 (nl) * | 1995-12-15 | 1997-06-17 | Maasland Nv | Inrichting voor het melken van dieren. |
| NL1004406C2 (nl) * | 1996-08-01 | 1998-02-05 | Maasland Nv | Inrichting voor het automatisch melken van dieren. |
| NL1006804C2 (nl) * | 1997-08-20 | 1999-02-23 | Maasland Nv | Sensorinrichting, alsmede werkwijze voor het bepalen van de positie van een object, in het bijzonder een speen van een te melken dier. |
| US7952511B1 (en) * | 1999-04-07 | 2011-05-31 | Geer James L | Method and apparatus for the detection of objects using electromagnetic wave attenuation patterns |
| DK1253440T3 (da) * | 2001-04-24 | 2011-08-15 | Lely Entpr Ag | Indretning til at bestemme positionen af en pattekop på et dyr |
| JP3772969B2 (ja) | 2001-10-16 | 2006-05-10 | オムロン株式会社 | 車載用レーダ装置 |
| DE10351714B4 (de) * | 2003-11-05 | 2005-09-29 | Eads Astrium Gmbh | Vorrichtung zur optischen Erfassung eines entfernten Objekts |
| KR20130115205A (ko) * | 2010-06-04 | 2013-10-21 | 데어리 체크, 인코포레이티드. | 모듈형 조작 장치 |
-
2011
- 2011-05-13 AU AU2011252843A patent/AU2011252843A1/en not_active Abandoned
- 2011-05-13 US US13/697,778 patent/US9119372B2/en active Active
- 2011-05-13 JP JP2013510351A patent/JP2013530392A/ja not_active Withdrawn
- 2011-05-13 EP EP20110781381 patent/EP2568800A1/en not_active Withdrawn
- 2011-05-13 KR KR20127032526A patent/KR20130115093A/ko not_active Application Discontinuation
- 2011-05-13 WO PCT/US2011/036524 patent/WO2011143616A1/en active Application Filing
- 2011-05-13 CA CA2799358A patent/CA2799358C/en not_active Expired - Fee Related
- 2011-05-13 NZ NZ60341011A patent/NZ603410A/xx not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| KR20130115093A (ko) | 2013-10-21 |
| CA2799358C (en) | 2018-10-16 |
| AU2011252843A1 (en) | 2012-11-22 |
| EP2568800A1 (en) | 2013-03-20 |
| WO2011143616A1 (en) | 2011-11-17 |
| US9119372B2 (en) | 2015-09-01 |
| NZ603410A (en) | 2013-09-27 |
| CA2799358A1 (en) | 2011-11-17 |
| US20130061806A1 (en) | 2013-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013530392A (ja) | 空間における物体を検出決定するセンサー装置 | |
| WO2009093024A1 (en) | Wireless position sensing in three dimensions using camera and ultrasound | |
| JP2516610B2 (ja) | 動物の搾乳方法及び装置 | |
| JP5161221B2 (ja) | 家畜の自動搾乳装置 | |
| US8072614B2 (en) | Method of locating an object in 3-D | |
| KR101702796B1 (ko) | 검사 대상의 핸드 가이드식 초음파 검사를 위한 방법 및 시스템 | |
| US20160252619A1 (en) | Laser tracker having target-seeking functionality | |
| EP1220603A1 (en) | Apparatus for detecting the position of an object | |
| NL8502039A (nl) | Inrichting voor het automatisch aanbrengen van een melkstel. | |
| JP2013525776A (ja) | 対象物までの距離および対象物への方向を求める装置 | |
| JP2002521007A (ja) | 牛から自動的に搾乳する装置および方法 | |
| JPH0223823A (ja) | 自動搾乳装置用超音波探知機とそれを使用した自動搾乳装置及び搾乳方法 | |
| CN110940990A (zh) | 激光雷达系统及其探测方法和应用 | |
| US8199055B2 (en) | Method and system for locating an object on a surface | |
| JP2013530392A5 (ja) | ||
| EP2312936B1 (en) | Dairy animal treatment system | |
| SE1550114A1 (sv) | Milking arrangement | |
| Rajai et al. | Binaural sonar system for simultaneous sensing of distance and direction of extended barriers | |
| KR20240022533A (ko) | 위치 측정 장치, 위치 측정 시스템, 및 측정 장치 | |
| US20230284898A1 (en) | Arrangement and method for determining eye lengths | |
| JP2011045602A (ja) | 非接触式超音波眼圧計 | |
| CN109419522A (zh) | 成像医学设备和用于运行成像医学设备的方法 | |
| CN212212261U (zh) | 用于确定动物的乳头的空间位置的装置以及挤奶装置 | |
| CN105573505B (zh) | 车载平视显示器、空间定位方法及汽车 | |
| KR20230094788A (ko) | 라이더 센서 장치 및 이를 구비한 전자 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140512 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140512 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20141208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141212 |