JP2013258564A - データポーリング方法及びその方法を用いた原子力プラントのディジタル計装制御システム - Google Patents
データポーリング方法及びその方法を用いた原子力プラントのディジタル計装制御システム Download PDFInfo
- Publication number
- JP2013258564A JP2013258564A JP2012133382A JP2012133382A JP2013258564A JP 2013258564 A JP2013258564 A JP 2013258564A JP 2012133382 A JP2012133382 A JP 2012133382A JP 2012133382 A JP2012133382 A JP 2012133382A JP 2013258564 A JP2013258564 A JP 2013258564A
- Authority
- JP
- Japan
- Prior art keywords
- input
- data
- processing unit
- cpu
- failure detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0751—Error or fault detection not based on redundancy
- G06F11/0754—Error or fault detection not based on redundancy by exceeding limits
- G06F11/0757—Error or fault detection not based on redundancy by exceeding limits by exceeding a time limit, i.e. time-out, e.g. watchdogs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0706—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment
- G06F11/0721—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment within a central processing unit [CPU]
- G06F11/0724—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment within a central processing unit [CPU] in a multiprocessor or a multi-core unit
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/06—Digital input from, or digital output to, record carriers, e.g. RAID, emulated record carriers or networked record carriers
- G06F3/0601—Interfaces specially adapted for storage systems
- G06F3/0628—Interfaces specially adapted for storage systems making use of a particular technique
- G06F3/0655—Vertical data movement, i.e. input-output transfer; data movement between one or more hosts and one or more storage devices
- G06F3/0656—Data buffering arrangements
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Quality & Reliability (AREA)
- Human Computer Interaction (AREA)
- Testing And Monitoring For Control Systems (AREA)
- Selective Calling Equipment (AREA)
Abstract
【解決手段】CPU10は、データ送信命令出力処理部11と、入力手段20の故障を検知する入力手段故障検知処理部22の故障検知信号を入力する入力手段故障検知信号入力処理部13と、入力手段20の入力データ更新処理部21によりデータが更新される都度、その更新データを格納する入力データ格納メモリと12、入力データ格納メモリ12の入力データを取得すると共に、入力手段故障検知信号入力処理部13の検知信号を取得し演算処理を実行するCPU演算処理部14と、を備え、CPU演算処理部14は、入力手段故障検知処理部22の故障検知処理時間をT22、データ送信命令出力処理部11のデータ送信命令出力周期をT1とした場合、{(T22÷T1)の整数切り上げ}×T1で示す時間前の周期データを取得する。
【選択図】図2
Description
入力データ格納メモリの入力データを取得すると共に、上記入力手段故障検知信号入力処理部の検知信号を取得し演算処理を実行するCPU演算処理部と、を備え、上記CPU演算処理部は、上記入力手段故障検知処理部の故障検知処理時間をT22、データ送信命令出力処理部のデータ送信命令出力周期をT1とした場合、
{(T22÷T1)の整数切り上げ}×T1
で示す時間前の周期データを取得するものである。
{(T22÷T1)の整数切り上げ}×T1
で示す時間前の周期データを取得するものである。
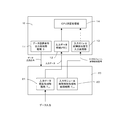
図1は、この発明の実施の形態1によるデータポーリング方法を用いた原子力プラントのディジタル計装制御システムを説明するブロック構成図である。
図1において、原子力プラントのディジタル計装制御システムにおけるデータ入力処理部100は、CPU10と、CPU10に対するデータ入力手段である、例えば入力モジュール20を備えている。
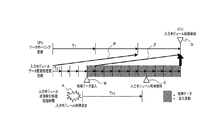
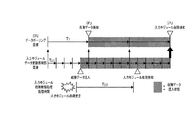
図2は、CPU10のデータポーリングにおけるCPU10と入力モジュール20のタイミング概念図である。図2に示すように、CPU10は、入力モジュール20に対し、所定周期T1でデータ送信命令を出力する。一方、入力モジュール20は、所定周期T21で入力データの更新を実行する。また、入力モジュール故障検知処理部22は、所定周期T22の処理時間で入力モジュール20の故障を検知する。
{(T22÷T1)の整数切り上げ}×T1 ・・・・式1
ルにおけるデータ更新周期が非同期であり、且つ、入力モジュールにより検知される入力モジュール故障検知時間がCPUのデータポーリング周期に対して大きいものであっても、CPUの出力として信頼性の高い確認データを出力することができる。
次に、この発明の実施の形態2による原子力プラントのディジタル計装制御システムについて説明する。図4は、実施の形態2による原子力プラントのディジタル計装制御システムを説明するブロック構成図である。
実施の形態1では、外部から入力される、例えば原子力プラントの加圧器の圧力、加熱器の温度、あるいは補機開閉状態などのデータ入力を直接処理する入力モジュール20について説明したが、図4に示すような他装置とネットワークに接続する原子力プラント向けディジタル制御装置において、他装置からの通信データをネットワーク通信モジュールから入力する場合の処理に適用しても同様の効果が得られる。
11 データ送信命令出力処理部
12 入力データ格納メモリ
13 入力モジュール故障検知信号入力処理部
14 CPU演算処理部
20 入力モジュール
21 入力データ更新処理部
22 入力モジュール故障検知処理部
30a、30b、30c ネットワーク通信モジュール
31 ネットワーク
100、100a、100b、100c データ入力処理部
Claims (2)
- CPUと、該CPUに対する入力データの入力手段との間で実施されるデータポーリング方法において、
上記CPUは、データ送信命令出力処理部と、上記入力手段の故障を検知する入力手段故障検知処理部の故障検知信号を入力する入力手段故障検知信号入力処理部と、上記入力手段の入力データ更新処理部によりデータが更新される都度、その更新データを格納する入力データ格納メモリと、上記入力データ格納メモリの入力データを取得すると共に、上記入力手段故障検知信号入力処理部の検知信号を取得し演算処理を実行するCPU演算処理部と、を備え、
上記CPU演算処理部は、上記入力手段故障検知処理部の故障検知処理時間をT22、データ送信命令出力処理部のデータ送信命令出力周期をT1とした場合、
{(T22÷T1)の整数切り上げ}×T1
で示す時間前の周期データを取得することを特徴とするデータポーリング方法。 - CPUと、該CPUに対する入力データの入力手段との間でデータポーリングを実施する原子力プラントのディジタル計装制御システムにおいて、
上記CPUは、データ送信命令出力処理部と、上記入力手段の故障を検知する入力手段故障検知処理部の故障検知信号を入力する入力手段故障検知信号入力処理部と、上記入力手段の入力データ更新処理部によりデータが更新される都度、その更新データを格納する入力データ格納メモリと、上記入力データ格納メモリの入力データを取得すると共に、上記入力手段故障検知信号入力処理部の検知信号を取得し演算処理を実行するCPU演算処理部と、を備え、
上記CPU演算処理部は、上記入力手段故障検知処理部の故障検知処理時間をT22、データ送信命令出力処理部のデータ送信命令出力周期をT1とした場合、
{(T22÷T1)の整数切り上げ}×T1
で示す時間前の周期データを取得することを特徴とする原子力プラントのディジタル計装制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012133382A JP5653391B2 (ja) | 2012-06-13 | 2012-06-13 | データポーリング方法及びその方法を用いた原子力プラントのディジタル計装制御システム |
| US13/661,278 US9170871B2 (en) | 2012-06-13 | 2012-10-26 | Data polling method and digital instrumentation and control system for atomic power plant using the method |
| CN201310014884.1A CN103488130B (zh) | 2012-06-13 | 2013-01-15 | 数据轮询方法及使用该方法的核电站数字化仪表控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012133382A JP5653391B2 (ja) | 2012-06-13 | 2012-06-13 | データポーリング方法及びその方法を用いた原子力プラントのディジタル計装制御システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013258564A true JP2013258564A (ja) | 2013-12-26 |
| JP2013258564A5 JP2013258564A5 (ja) | 2014-07-24 |
| JP5653391B2 JP5653391B2 (ja) | 2015-01-14 |
Family
ID=49757110
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012133382A Active JP5653391B2 (ja) | 2012-06-13 | 2012-06-13 | データポーリング方法及びその方法を用いた原子力プラントのディジタル計装制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9170871B2 (ja) |
| JP (1) | JP5653391B2 (ja) |
| CN (1) | CN103488130B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104820420A (zh) * | 2015-04-20 | 2015-08-05 | 中国科学院光电技术研究所 | 一种控制系统模拟电位传感器误差补偿方法 |
| JP2018147222A (ja) * | 2017-03-06 | 2018-09-20 | 三菱電機株式会社 | プラント機器の監視制御装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2834777B2 (ja) | 1989-07-11 | 1998-12-14 | 株式会社三共 | 弾球遊技機 |
| KR102030461B1 (ko) * | 2017-11-23 | 2019-10-10 | 현대오트론 주식회사 | 복수의 프로세서 오류 감지 시스템 및 그 방법 |
| CN110400646B (zh) * | 2019-04-28 | 2024-07-09 | 北京广利核系统工程有限公司 | 应用于核电站安全级dcs的人机交互装置、系统及方法 |
| CN110111919B (zh) * | 2019-05-24 | 2021-09-21 | 中核控制系统工程有限公司 | 核电站安全级dcs停堆控制系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010096602A (ja) * | 2008-10-16 | 2010-04-30 | Panasonic Corp | センサ装置 |
| JP2012079184A (ja) * | 2010-10-04 | 2012-04-19 | Mitsubishi Heavy Ind Ltd | 制御装置および原子力発電プラント制御システム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3824118B2 (ja) * | 1998-03-03 | 2006-09-20 | Kddi株式会社 | ポーリング周期制御装置 |
| US6948113B1 (en) * | 1999-04-21 | 2005-09-20 | Seagate Technology Llc | Self-throttling error-correction buffer and method for a disc drive |
| JP3520032B2 (ja) * | 2000-06-14 | 2004-04-19 | 松下電器産業株式会社 | データ処理装置 |
| US6983324B1 (en) * | 2000-10-23 | 2006-01-03 | International Business Machines Corporation | Dynamic modification of cluster communication parameters in clustered computer system |
| JP2003259469A (ja) | 2002-02-28 | 2003-09-12 | Mitsubishi Electric Corp | 水道施設の広域管理方法およびシステム |
| CN1230737C (zh) * | 2002-09-23 | 2005-12-07 | 华为技术有限公司 | 一种设备数据轮询调度方法 |
| CN100401708C (zh) * | 2004-12-17 | 2008-07-09 | 中兴通讯股份有限公司 | 基于自适应服务质量保证的无线局域网分群轮询方法 |
| CN101437293A (zh) * | 2008-12-05 | 2009-05-20 | 浙江大学 | 面向透明传输设备的远距离无线多跳数据轮询方法 |
-
2012
- 2012-06-13 JP JP2012133382A patent/JP5653391B2/ja active Active
- 2012-10-26 US US13/661,278 patent/US9170871B2/en active Active
-
2013
- 2013-01-15 CN CN201310014884.1A patent/CN103488130B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010096602A (ja) * | 2008-10-16 | 2010-04-30 | Panasonic Corp | センサ装置 |
| JP2012079184A (ja) * | 2010-10-04 | 2012-04-19 | Mitsubishi Heavy Ind Ltd | 制御装置および原子力発電プラント制御システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104820420A (zh) * | 2015-04-20 | 2015-08-05 | 中国科学院光电技术研究所 | 一种控制系统模拟电位传感器误差补偿方法 |
| JP2018147222A (ja) * | 2017-03-06 | 2018-09-20 | 三菱電機株式会社 | プラント機器の監視制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5653391B2 (ja) | 2015-01-14 |
| CN103488130B (zh) | 2016-03-09 |
| US9170871B2 (en) | 2015-10-27 |
| US20130339791A1 (en) | 2013-12-19 |
| CN103488130A (zh) | 2014-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5653391B2 (ja) | データポーリング方法及びその方法を用いた原子力プラントのディジタル計装制御システム | |
| CN103135518B (zh) | 程序流控制监控例程、与之相关的方法以及系统 | |
| US11782431B2 (en) | Control device and non-transitory computer-readable recording medium recording program | |
| US10452033B2 (en) | Process control system | |
| EP2196880B1 (en) | Plant control system and method | |
| US9891603B2 (en) | Process control apparatus and system, and method for determining normality thereof | |
| JP5684950B2 (ja) | データ収集システム及びデータ収集システムプログラム | |
| WO2015114821A1 (ja) | 監視制御システム及び制御装置 | |
| US20160091882A1 (en) | System and method of multi-core based software execution for programmable logic controllers | |
| JP2011185875A (ja) | 制御装置 | |
| CN102932222A (zh) | 支持RS485&Modbus多主站数据采集的通信转换器 | |
| JP2013258564A5 (ja) | ||
| JP5996150B2 (ja) | プログラマブル表示器及び作画ソフトウェア | |
| US20220004155A1 (en) | Control system and control device | |
| JP2011170476A (ja) | データ処理システム及びデータ処理方法及びプログラム | |
| Li et al. | Evaluation of delays induced by profibus PA networks | |
| JP6322122B2 (ja) | 中央監視制御システム、サーバ装置、検出情報作成方法、及び、検出情報作成プログラム | |
| JP5844013B1 (ja) | 機能ユニット、アナログ入力ユニット、プログラマブルコントローラシステム | |
| CN108958210B (zh) | 工厂监视控制系统的维护计算机及电脑可读取记录介质 | |
| JP2010016960A (ja) | Pcm電流差動保護継電装置 | |
| CN203311257U (zh) | 一种分布式物流设备的联调系统 | |
| JP6027410B2 (ja) | プラント監視制御システム、およびプラント監視制御方法 | |
| JP7430694B2 (ja) | 制御システム、制御方法、及びプログラム | |
| JP5957423B2 (ja) | 制御コントローラおよびデータ制御方法 | |
| JP2017045303A (ja) | パソコン機能異常時の要因検出が可能な制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140606 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141021 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141118 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5653391 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |