JP2013218082A - 撮像装置及びその制御方法 - Google Patents
撮像装置及びその制御方法 Download PDFInfo
- Publication number
- JP2013218082A JP2013218082A JP2012087933A JP2012087933A JP2013218082A JP 2013218082 A JP2013218082 A JP 2013218082A JP 2012087933 A JP2012087933 A JP 2012087933A JP 2012087933 A JP2012087933 A JP 2012087933A JP 2013218082 A JP2013218082 A JP 2013218082A
- Authority
- JP
- Japan
- Prior art keywords
- focus
- shift amount
- image shift
- image
- partial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Abstract
【解決手段】 位相差方式の焦点検出を行う撮像装置であって、視差を有する一対の画像信号を出力する焦点検出領域を含む撮像素子(106)と、焦点検出領域から得られた一対の画像信号の相関演算の結果に基づいて、焦点検出領域内に設定された部分領域及び焦点検出領域のそれぞれにおいて、合焦状態を示す像ずれ量を求める算出手段(109)と、部分領域における像ずれ量と焦点検出領域における像ずれ量との差が予め決められた閾値以上の場合に、部分領域の合焦状態が偽合焦であると判断する判断手段(109)と、差が前記閾値よりも低い場合に、前記部分領域の前記像ずれ量に基づいて、合焦制御を行う合焦制御手段(109)とを有する。
【選択図】 図1
Description
図1は本発明の第1の実施形態に係る撮像システムの概略構成を示す図であり、主に撮像装置100と交換レンズ200とから構成される。

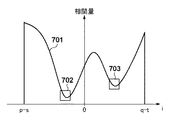
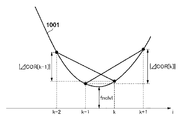
また図8のように複数のゼロクロスが存在する場合(即ち、極小値が2回以上ある場合)は、ゼロクロスでの相関量変化の急峻性maxder(以下、急峻性と呼ぶ)が大きいところを第1のゼロクロスとする。この急峻性はAFのしやすさを示す指標で、値が大きいほど輝度変化がより顕著であり、AFしやすい点であることを示す。急峻性は以下の式(5)によって算出する事ができる。
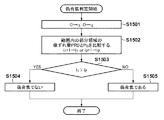
次に、本発明の第2の実施形態について説明する。なお、上述した第1の実施形態とは、偽合焦判定処理が異なるが、それ以外は第1の実施形態と同様であるため、ここでは偽合焦判定処理以外の説明を省略する。
Claims (11)
- 位相差方式の焦点検出を行う撮像装置であって、
視差を有する一対の画像信号を出力する焦点検出領域を含む撮像素子と、
前記焦点検出領域から得られた一対の画像信号の相関演算の結果に基づいて、前記焦点検出領域内に設定された部分領域及び前記焦点検出領域のそれぞれにおいて、合焦状態を示す像ずれ量を求める算出手段と、
前記部分領域における前記像ずれ量と前記焦点検出領域における前記像ずれ量との差が予め決められた閾値以上の場合に、前記部分領域の合焦状態が偽合焦であると判断する判断手段と、
前記差が前記閾値よりも低い場合に、前記部分領域の前記像ずれ量に基づいて、合焦制御を行う合焦制御手段と
を有することを特徴とする撮像装置。 - 前記算出手段は、前記一対の画像信号をシフトしながら、各像ずれ量における前記一対画像信号の差を示す相関量を算出し、該相関量の極小値と該極小値の前後の相関量の変化量の急峻性とを求め、前記急峻性が最も高い極小値の像ずれ量を、前記合焦状態を示す像ずれ量として決定することを特徴とする請求項1に記載の撮像装置。
- 前記判断手段により前記部分領域の合焦状態が偽合焦であると判断された場合、前記部分領域における前記相関量の極小値が2回以上ある場合には、前記算出手段は、前記判断手段により偽合焦であると判断された前記合焦状態を示す像ずれ量に対応する極小値を除く極小値と急峻性とに基づいて、前記合焦状態を示す像ずれ量を決定し直すことを特徴とする請求項2に記載の撮像装置。
- 前記部分領域は、前記焦点検出領域内に複数が設定され、
前記算出手段は、前記複数の部分領域それぞれについて前記合焦状態を示す像ずれ量を求めると共に、該像ずれ量の信頼性を求め、
前記撮像装置は、前記合焦状態を示す像ずれ量と該像ずれ量の信頼性とに基づいて、前記複数の部分領域の1つを選択する選択手段を更に有し、
前記判断手段は、前記選択手段により選択された部分領域の前記像ずれ量の判断を行うことを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。 - 前記判断手段により、前記選択手段により選択された部分領域における、極小値に対応する像ずれ量での合焦状態が全て偽合焦であると判断された場合、前記選択手段は、当該部分領域を除く他の部分領域から、1つの部分領域を選択し直すことを特徴とする請求項4に記載の撮像装置。
- 位相差方式の焦点検出を行う撮像装置であって、
視差を有する一対の画像信号を出力する、複数の部分領域に分割された焦点検出領域を含む撮像素子と、
前記焦点検出領域から得られた一対の画像信号の相関演算の結果に基づいて、前記複数の部分領域それぞれにおいて、合焦状態を示す像ずれ量と該像ずれ量の信頼性とを求める算出手段と、
前記合焦状態を示す像ずれ量と該像ずれ量の信頼性とに基づいて、前記複数の部分領域の1つを選択する選択手段と、
前記選択された部分領域における前記像ずれ量と、前記選択された部分領域以外の部分領域それぞれにおける前記像ずれ量との差を予め決められた閾値と比較し、前記閾値以上となる部分領域の数が、前記閾値未満となる部分領域の数以上の場合に、前記選択された部分領域の合焦状態が偽合焦であると判断する判断手段と、
前記閾値以上となる部分領域の数が、前記閾値未満となる部分領域の数よりも少ない場合に、前記選択された部分領域の前記像ずれ量に基づいて、合焦制御を行う合焦制御手段と
を有することを特徴とする撮像装置。 - 前記算出手段は、前記一対の画像信号をシフトしながら、各像ずれ量における前記一対の画像信号の差を示す相関量を算出し、該相関量の極小値と該極小値の前後の相関量の変化量の急峻性とを求め、前記急峻性が最も高い極小値の像ずれ量を、前記合焦状態を示す像ずれ量として決定することを特徴とする請求項6に記載の撮像装置。
- 前記判断手段により前記選択された部分領域の合焦状態が偽合焦であると判断された場合、前記選択された部分領域における前記相関量の極小値が2回以上ある場合には、前記算出手段は、前記判断手段により偽合焦であると判断された前記合焦状態を示す像ずれ量に対応する極小値を除く極小値と急峻性とに基づいて、前記合焦状態を示す像ずれ量を決定し直すことを特徴とする請求項7に記載の撮像装置。
- 前記判断手段により、前記選択手段により選択された部分領域における、極小値に対応する像ずれ量での合焦状態が全て偽合焦であると判断された場合、前記選択手段は、当該部分領域を除く他の部分領域から、1つの部分領域を選択し直すことを特徴とする請求項8に記載の撮像装置。
- 視差を有する一対の画像信号を出力する焦点検出領域を含む撮像素子から得られた前記画像信号を用いて、位相差方式の焦点検出を行う撮像装置の制御方法であって、
算出手段が、前記焦点検出領域から得られた一対の画像信号の相関演算の結果に基づいて、前記焦点検出領域内に設定された部分領域及び前記焦点検出領域のそれぞれにおいて、合焦状態を示す像ずれ量を求める算出工程と、
判断手段が、前記部分領域における前記像ずれ量と前記焦点検出領域における前記像ずれ量との差が予め決められた閾値以上の場合に、前記部分領域の合焦状態が偽合焦であると判断する判断工程と、
合焦制御手段が、前記差が前記閾値よりも低い場合に、前記部分領域の前記像ずれ量に基づいて、合焦制御を行う合焦制御工程と
を有することを特徴とする撮像装置の制御方法。 - 視差を有する一対の画像信号を出力する、複数の部分領域に分割された焦点検出領域を含む撮像素子とから得られた前記画像信号を用いて、位相差方式の焦点検出を行う撮像装置の制御方法であって、
算出手段が、前記焦点検出領域から得られた一対の画像信号の相関演算の結果に基づいて、前記複数の部分領域それぞれにおいて、合焦状態を示す像ずれ量と該像ずれ量の信頼性とを求める算出工程と、
選択手段が、前記合焦状態を示す像ずれ量と該像ずれ量の信頼性とに基づいて、前記複数の部分領域の1つを選択する選択工程と、
判断手段が、前記選択された部分領域における前記像ずれ量と、前記選択された部分領域以外の部分領域それぞれにおける前記像ずれ量との差を予め決められた閾値と比較し、前記閾値以上となる部分領域の数が、前記閾値未満となる部分領域の数以上の場合に、前記選択された部分領域の合焦状態が偽合焦であると判断する判断工程と、
合焦制御手段が、前記閾値以上となる部分領域の数が、前記閾値未満となる部分領域の数よりも少ない場合に、前記選択された部分領域の前記像ずれ量に基づいて、合焦制御を行う合焦制御工程と
を有することを特徴とする撮像装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012087933A JP2013218082A (ja) | 2012-04-06 | 2012-04-06 | 撮像装置及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012087933A JP2013218082A (ja) | 2012-04-06 | 2012-04-06 | 撮像装置及びその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013218082A true JP2013218082A (ja) | 2013-10-24 |
| JP2013218082A5 JP2013218082A5 (ja) | 2015-05-21 |
Family
ID=49590250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012087933A Pending JP2013218082A (ja) | 2012-04-06 | 2012-04-06 | 撮像装置及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013218082A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017057072A1 (ja) * | 2015-09-30 | 2017-04-06 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| WO2018008243A1 (ja) * | 2016-07-06 | 2018-01-11 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| JP2019086580A (ja) * | 2017-11-02 | 2019-06-06 | キヤノン株式会社 | 焦点調節装置、焦点調節方法、及び撮像装置 |
| US10750079B2 (en) | 2016-12-14 | 2020-08-18 | Olympus Corporation | Focus adjustment device and focus adjustment method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0473729A (ja) * | 1990-07-16 | 1992-03-09 | Nikon Corp | カメラの露出制御装置 |
| JPH06308376A (ja) * | 1993-04-19 | 1994-11-04 | Fuji Film Micro Device Kk | 位相差距離検出装置および方法 |
| JPH08248303A (ja) * | 1995-03-07 | 1996-09-27 | Minolta Co Ltd | 焦点検出装置 |
| JPH1026526A (ja) * | 1996-07-10 | 1998-01-27 | Fuji Photo Film Co Ltd | 三角測距方法 |
-
2012
- 2012-04-06 JP JP2012087933A patent/JP2013218082A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0473729A (ja) * | 1990-07-16 | 1992-03-09 | Nikon Corp | カメラの露出制御装置 |
| JPH06308376A (ja) * | 1993-04-19 | 1994-11-04 | Fuji Film Micro Device Kk | 位相差距離検出装置および方法 |
| JPH08248303A (ja) * | 1995-03-07 | 1996-09-27 | Minolta Co Ltd | 焦点検出装置 |
| JPH1026526A (ja) * | 1996-07-10 | 1998-01-27 | Fuji Photo Film Co Ltd | 三角測距方法 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017057072A1 (ja) * | 2015-09-30 | 2017-04-06 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| JP6236580B2 (ja) * | 2015-09-30 | 2017-11-22 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| CN108139563A (zh) * | 2015-09-30 | 2018-06-08 | 富士胶片株式会社 | 对焦控制装置、对焦控制方法、对焦控制程序、透镜装置、摄像装置 |
| US10520793B2 (en) | 2015-09-30 | 2019-12-31 | Fujifilm Corporation | Focusing control device, focusing control method, focusing control program, lens device, and imaging device |
| CN108139563B (zh) * | 2015-09-30 | 2020-09-01 | 富士胶片株式会社 | 对焦控制装置、对焦控制方法、对焦控制程序、透镜装置、摄像装置 |
| WO2018008243A1 (ja) * | 2016-07-06 | 2018-01-11 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| JP6462189B2 (ja) * | 2016-07-06 | 2019-01-30 | 富士フイルム株式会社 | 合焦制御装置、合焦制御方法、合焦制御プログラム、レンズ装置、撮像装置 |
| US10802245B2 (en) | 2016-07-06 | 2020-10-13 | Fujifilm Corporation | Focusing control device, focusing control method, focusing control program, lens device, and imaging device |
| US11343422B2 (en) | 2016-07-06 | 2022-05-24 | Fujifilm Corporation | Focusing control device, focusing control method, focusing control program, lens device, and imaging device |
| US10750079B2 (en) | 2016-12-14 | 2020-08-18 | Olympus Corporation | Focus adjustment device and focus adjustment method |
| JP2019086580A (ja) * | 2017-11-02 | 2019-06-06 | キヤノン株式会社 | 焦点調節装置、焦点調節方法、及び撮像装置 |
| JP7023673B2 (ja) | 2017-11-02 | 2022-02-22 | キヤノン株式会社 | 焦点調節装置、焦点調節方法、及び撮像装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8098984B2 (en) | Focus detecting apparatus and an imaging apparatus | |
| US9781330B2 (en) | Focus detection apparatus and control method for focus detection apparatus | |
| JP5845023B2 (ja) | 焦点検出装置及びそれを有するレンズ装置及び撮像装置 | |
| JP2013190734A (ja) | 焦点検出装置および撮像装置 | |
| JP2010139563A (ja) | 焦点検出装置、焦点調節装置、撮像装置 | |
| JP5963552B2 (ja) | 撮像装置 | |
| JP2023115356A (ja) | 計測装置、撮像装置、制御方法及びプログラム | |
| JP2013218082A (ja) | 撮像装置及びその制御方法 | |
| US11808561B2 (en) | Electronic apparatus for controlling a projector to project an image onto a screen at an actual size length, control method thereof and computer readable storage medium | |
| US9906709B2 (en) | Image pickup apparatus having image pickup element including a plurality of pixels, each pixel including a plurality of photodiodes corresponding to microlens, lens unit to be removably mounted on image pick up apparatus, and methods of controlling image pickup apparatus and lens unit | |
| WO2015115452A1 (ja) | 焦点検出装置、焦点調節装置およびカメラ | |
| JP2015055635A (ja) | 撮像装置及びその制御方法 | |
| JP2019168479A (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP2012226206A (ja) | 画像追尾装置および撮像装置 | |
| US11924542B2 (en) | Accuracy estimation apparatus, image capturing apparatus, accuracy estimation method, control method, and storage medium | |
| JP6615258B2 (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP6501512B2 (ja) | フォーカス制御装置、フォーカス制御方法およびフォーカス制御プログラム | |
| JP2018180135A (ja) | 撮像装置 | |
| JP2014235237A (ja) | 焦点検出装置および焦点調節装置 | |
| JP2005249432A (ja) | プロジェクタ装置および距離測定方法 | |
| JP2013140380A (ja) | 撮像装置 | |
| JP6257201B2 (ja) | 焦点検出装置、その制御方法、および制御プログラム、並びに撮像装置 | |
| JP2002014275A (ja) | カメラ | |
| JP2020012891A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2013187776A (ja) | 測光装置及び撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150401 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150401 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160513 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160624 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160902 |