JP2012255686A - 車両の位置姿勢測定装置 - Google Patents
車両の位置姿勢測定装置 Download PDFInfo
- Publication number
- JP2012255686A JP2012255686A JP2011128036A JP2011128036A JP2012255686A JP 2012255686 A JP2012255686 A JP 2012255686A JP 2011128036 A JP2011128036 A JP 2011128036A JP 2011128036 A JP2011128036 A JP 2011128036A JP 2012255686 A JP2012255686 A JP 2012255686A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- wheel
- steering angle
- orientation
- wheel speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Abstract
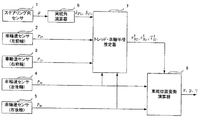
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T† R,r† Rl,r† Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
【選択図】図1
Description
さらに、車輪の回転数の合計および/または二つの車輪の回転数差および/または車輪の所定の回転に対する時間ないし回転状態もしくは回転状態に達するまでの時間に依存した補正係数を導入することにより、カーブ走行中などに生じるトレッドの変化に対応した位置姿勢測定方式も提案されている(例えば特許文献2)。
図1はこの発明の実施の形態1による車両の位置姿勢測定装置の構成図である。この車両の位置姿勢測定装置は、ステアリング角θを検出するためのステアリング角センサ1と、車両の各車輪の車輪速を検出するために車輪速センサ2(左前輪),車輪速センサ3(右前輪),車輪速センサ4(左後輪),車輪速センサ5(右後輪)を有している。車輪速センサ2,3,4,5は、それぞれ対応する車輪が所定角度回転する毎に検出パルスを出力する公知の構成の車輪速センサである。

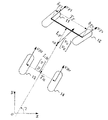
vFl,vFr,vRl,vRr:それぞれ車輪11,12,13,14の移動速度
vx,vy:それぞれ重心速度のx軸成分,y軸成分(慣性座標系は任意)
(ドット)γ:車両の姿勢角(ヨー角:基準座標xy上の車両方向のx軸とのなす角度)γの単位時間当たりの変化量(角速度)
LF:前輪軸中心(左前車輪11と右前車輪12を結ぶ線の中心)と車両重心c.g.との間の長さ
LR:後輪軸中心(左後車輪13と右後車輪14を結ぶ線の中心)と車両重心c.g.との間の長さ
である。例えば、後退駐車時のように、車両が低速で定常運動を行なっていると考えられる場合においては、このような仮定が成立する。
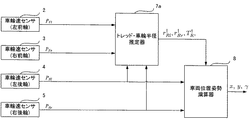
図3はこの発明の実施の形態2による車両の位置姿勢測定装置の構成図である。この装置は、車両の各車輪の車輪速を検出するための車輪速センサ(左前輪)2,車輪速センサ(右前輪)3,車輪速センサ(左後輪)4,車輪速センサ(右後輪)5以外のセンサを必要としない。この構成によれば、図1に示したステアリング角センサ1と実舵角演算器6が不要となるほか、ステアリング機構に基づく検出誤差による車両の位置姿勢測定精度の悪化が生じない。
Claims (2)
- 前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、
ステアリング角を検出するステアリング角検出手段と、
車両の前後左右四輪の車輪速を検出する車輪速検出手段と、
前記ステアリング角検出手段からの出力に基づいて実舵角を演算する実舵角演算手段と、
前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、
前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、
を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置。 - 前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、
車両の前後左右四輪の車輪速を検出する車輪速検出手段と、
前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、
前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、
を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011128036A JP5591185B2 (ja) | 2011-06-08 | 2011-06-08 | 車両の位置姿勢測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011128036A JP5591185B2 (ja) | 2011-06-08 | 2011-06-08 | 車両の位置姿勢測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012255686A true JP2012255686A (ja) | 2012-12-27 |
| JP5591185B2 JP5591185B2 (ja) | 2014-09-17 |
Family
ID=47527382
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011128036A Active JP5591185B2 (ja) | 2011-06-08 | 2011-06-08 | 車両の位置姿勢測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5591185B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109791049A (zh) * | 2016-10-06 | 2019-05-21 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于确定车辆的姿态的方法 |
| WO2020237495A1 (zh) * | 2019-05-28 | 2020-12-03 | 深圳市大疆创新科技有限公司 | 地面可移动平台与其运动信息检测方法、系统 |
| CN114872782A (zh) * | 2022-04-28 | 2022-08-09 | 上海景吾酷租科技发展有限公司 | 四轮全向底盘控制方法及系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59502153A (ja) * | 1982-11-06 | 1984-12-27 | ロ−ベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 陸上車両の位置測定方法および装置 |
| JPS62298716A (ja) * | 1986-06-18 | 1987-12-25 | Sumitomo Electric Ind Ltd | 相対方位誤差補正方式 |
| JPH04113218A (ja) * | 1990-09-04 | 1992-04-14 | Zexel Corp | 相対方位検出方式 |
| JPH08133116A (ja) * | 1994-11-14 | 1996-05-28 | Toyota Motor Corp | 左右力推定装置及びそれを用いた操舵制御装置 |
| JPH11230742A (ja) * | 1998-02-09 | 1999-08-27 | Nippon Soken Inc | 道路形状計測装置 |
| JP2010237173A (ja) * | 2009-03-31 | 2010-10-21 | Geo Technical Laboratory Co Ltd | 測定装置および測定システム |
-
2011
- 2011-06-08 JP JP2011128036A patent/JP5591185B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59502153A (ja) * | 1982-11-06 | 1984-12-27 | ロ−ベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 陸上車両の位置測定方法および装置 |
| JPS62298716A (ja) * | 1986-06-18 | 1987-12-25 | Sumitomo Electric Ind Ltd | 相対方位誤差補正方式 |
| JPH04113218A (ja) * | 1990-09-04 | 1992-04-14 | Zexel Corp | 相対方位検出方式 |
| JPH08133116A (ja) * | 1994-11-14 | 1996-05-28 | Toyota Motor Corp | 左右力推定装置及びそれを用いた操舵制御装置 |
| JPH11230742A (ja) * | 1998-02-09 | 1999-08-27 | Nippon Soken Inc | 道路形状計測装置 |
| JP2010237173A (ja) * | 2009-03-31 | 2010-10-21 | Geo Technical Laboratory Co Ltd | 測定装置および測定システム |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109791049A (zh) * | 2016-10-06 | 2019-05-21 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于确定车辆的姿态的方法 |
| WO2020237495A1 (zh) * | 2019-05-28 | 2020-12-03 | 深圳市大疆创新科技有限公司 | 地面可移动平台与其运动信息检测方法、系统 |
| CN114872782A (zh) * | 2022-04-28 | 2022-08-09 | 上海景吾酷租科技发展有限公司 | 四轮全向底盘控制方法及系统 |
| CN114872782B (zh) * | 2022-04-28 | 2023-09-01 | 上海景吾酷租科技发展有限公司 | 四轮全向底盘控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5591185B2 (ja) | 2014-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Zhao et al. | Design of a nonlinear observer for vehicle velocity estimation and experiments | |
| KR101297388B1 (ko) | 위치 보정 기능을 제공하는 이동 장치 및 위치 보정 방법 | |
| JP4281777B2 (ja) | 傾斜角推定機構を有する移動体 | |
| JP4655004B2 (ja) | 車両物理量推定装置及びプロブラム | |
| JP2011128093A5 (ja) | ||
| JP2011128093A (ja) | ロール角推定装置および輸送機器 | |
| JP5029442B2 (ja) | 車両姿勢角推定装置及びプログラム | |
| WO2007148818A1 (ja) | 姿勢角検出装置と姿勢角検出方法 | |
| US9914461B2 (en) | Vehicle roll angle estimation device | |
| CN110073172B (zh) | 用于确定机动车的相对位置的方法、用于机动车的位置确定系统和机动车 | |
| EP3015822B1 (en) | Sensor calibration method for vehicle | |
| CN107933562B (zh) | 用于计算道路摩擦力估算的方法和系统 | |
| KR20150089127A (ko) | 철도 차량의 횡력 추정장치 및 추정방법 | |
| JP4646045B2 (ja) | 駐車支援装置 | |
| JP5919889B2 (ja) | 車両姿勢制御装置 | |
| JP5591185B2 (ja) | 車両の位置姿勢測定装置 | |
| JP2016017796A (ja) | 車輌位置計測装置及び方法 | |
| CN105083374A (zh) | 用于控制后轮转向的方法 | |
| CN103391871B (zh) | 用于确定车辆的倾斜位置的方法和装置 | |
| JP2004150973A (ja) | 車両用加速度検出装置 | |
| CN109062213B (zh) | 一种基于修正比例导引的智能车自动驾驶的方法 | |
| US20220212742A1 (en) | Body posture detection device and straddle type vehicle | |
| WO2014171227A1 (ja) | 姿勢角推定装置およびそれを備える移動状態検出装置 | |
| CN111504309B (zh) | 低速运动中汽车位姿的计算方法 | |
| JP6632727B2 (ja) | 角度計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140701 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140729 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5591185 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |