JP2012176643A - 電気自動車 - Google Patents
電気自動車 Download PDFInfo
- Publication number
- JP2012176643A JP2012176643A JP2011039410A JP2011039410A JP2012176643A JP 2012176643 A JP2012176643 A JP 2012176643A JP 2011039410 A JP2011039410 A JP 2011039410A JP 2011039410 A JP2011039410 A JP 2011039410A JP 2012176643 A JP2012176643 A JP 2012176643A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- abnormality
- motor
- amount
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Power Steering Mechanism (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
【選択図】 図2
Description
また、自動車の操舵機構として、ステアリングホイールと転舵軸とが機械的に連結されていず、ステアリングホイールの回転角度を検出して転舵用のモータを駆動する電気制御式の操舵機構を用いたものがある。
従来は、このような電気制御式の操舵機構の異常や、左右輪の個別の駆動系の異常に対して、効果的に対応できる適切な制御を行えるものがなかった。
前記転舵用モータ13および操舵機構12を含む操舵系の異常の検出によって、その異常による転舵不足を補うように、前記トルク配分手段33による左右の駆動輪2,2のモータ6,6に対するトルク指令の配分を変更する機能と、前記走行用のモータ6,6およびこのモータ6,6の制御手段22,22を含む車輪駆動系の異常の検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、前記転舵用モータ13による転舵量を変更する機能とのいずれか一方または両方を有する異常時補完手段37を設けたことを特徴とする。
なお、異常による転舵不足を補うように左右のトルク指令の配分をどの程度に変化させるかは、適宜設計すれば良い。また、車輪駆動系の異常の検出によって、左右両駆動輪2,2の駆動バランスの変化量を補うように、転舵用モータ13による転舵量を変更するにつき、どの程度の変更を行うかについても、適宜設計すれば良い。
この構成の場合、操舵系に異常が発生しても、その異常による転舵不足を、左右の駆動輪2,2のトルク配分の変更により補完し、できだけドライバーの意図した方向に走行させることができる。
この構成の場合は、左右の駆動輪2,2のいずれかの車輪駆動系の異常が発生しても、その異常による左右両駆動輪2,2の駆動バランスの変化量を、操舵輪3,3の転舵角度によって補完し、できだけドライバーの意図した方向に走行させることができる。
電気制御式の操舵系の異常は、転舵用モータ13またはその駆動回路44の過熱による場合が多く、この過熱を監視して異常判断を行うことで、多くの場合の電気制御式の操舵系の異常が検出でき、温度測定による簡単な処理で、確実性の高い異常判定が行える。
車体の曲がり量、または操舵輪3,3の転舵角度を検出し、操舵具14の操作量と比較すれば、操舵系のより確実な異常検出が行える。直進方向に対する車体1の曲がり量の検出は、車両の姿勢制御等に用いられているヨーレートセンサ48や車両左右の加速度を検出するセンサ等の出力から検出できる。
車輪駆動系の異常は、前記走行用のモータ6,6またはこの走行用モータ6,6の駆動回路22,22の過熱による場合が多く、この過熱を監視して異常判断を行うことで、多くの場合の車輪駆動系の異常が検出でき、温度測定による簡単な処理で、確実性の高い異常判定が行える。
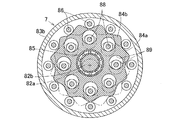
前記減速機7がサイクロイド減速機である場合は、円滑な減速動作が得られるが、減速比が高いため、モータ6の異常が拡大して駆動輪2に伝わる。そのため、この発明による相互補完による異常対応の効果が、より効果的に得られる。
トルク配分手段48は、アクセル操作手段16の出力する加速指令と、ブレーキ操作手段17の出力する減速指令と、操舵角センサ15の出力する旋回指令とから、左右輪の走行用モータ6,6に与える加速・減速指令をトルク指令値として生成し、各インバータ装置22へ配分して出力する。トルク配分手段48は、ブレーキ操作部手段17の出力する減速指令があったときに、モータ6を回生ブレーキとして機能させる制動トルク指令値と、機械式のブレーキ9,10を動作させる制動トルク指令値とに配分する機能を持つ。回生ブレーキとして機能させる制動トルク指令値は、前記左右輪の走行用モータ6,6に与える加速・減速指令をトルク指令値に反映させる。機械式のブレーキ9,10を動作させる制動トルク指令値は、ブレーキコントローラ23へ出力する。
このように異常対応トルク配分変更部39は、操舵系の異常による転舵不足を補うようにトルク配分を変更するが、その変更量は、一定量であっても良く、ステアリングホイール14の操舵角に比例する値であっても良い。また、操舵系の異常による転舵角度θの誤差量が検出できる場合は、その検出された誤差量に相当する値分だけ、トルク配分を変更しても良い。
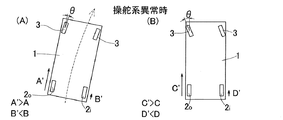
例えば、図6(A)のように、右側へ旋回しようとするときに、左側の駆動輪2o のトルクA″が、旋回に適したトルクAよりも小さくなることがある。この場合は、操舵輪2,2の転舵角度θを、ステアリングホイール14の操作量に対応する転舵角度よりも大きくする。このように、異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、転舵角度θを変えることで、ドライバーの操作したステアリングホイール14の操作量に対応した旋回走行が行える。
操舵系異常検出手段42は、例えば、転舵用モータ13またはこの転舵用モータ13の駆動回路44の温度を検出する温度検出手段45,46の検出温度が閾値を超えた場合に操舵系の異常と判定する。
電気制御式の操舵系の異常は、転舵用モータ13またはその駆動回路44の過熱による場合が多く、この過熱を監視して異常判断を行うことで、多くの場合の電気制御式の操舵系の異常が検出でき、温度測定による簡単な処理で、確実性の高い異常判定が行える。
車体の曲がり量、または操舵輪3,3の転舵角度を検出し、ステアリングホイール14の操作量と比較すれば、操舵系のより確実な異常検出が行える。直進方向に対する車体1の曲がり量の検出は、車両の姿勢制御等に用いられているヨーレートセンサ48や車両左右の加速度を検出するセンサ等の出力から検出できる。
車輪駆動系の異常は、走行用のモータ6またはその駆動回路であるインバータ装置22の過熱による場合が多く、この過熱を監視して異常判断を行うことで、多くの場合の車輪駆動系の異常が検出でき、温度測定による簡単な処理で、確実性の高い異常判定を行うことができる。
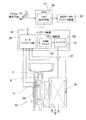
なお、インホイールモータ駆動装置8のモータ電流の配線や各種センサ系,指令系の配線は、モータハウジング72等に設けられたコネクタ99により纏めて行われる。
2…駆動輪
3…操舵輪
6…モータ
7…減速機
8…インホイールモータ駆動装置
11…転舵機構
12…操舵機構
13…転舵用モータ
16…ステアリングホイール(操舵具)
22…インバータ装置(モータの制御手段)
33…トルク配分手段
37…異常時補完手段
38…異常対応転舵量変更部
39…異常対応トルク配分変更部
42…操舵系異常検出手段
43…駆動系異常検出手段
44…駆動回路
45,46…温度検出手段
48…ヨーレートセンサ
49,50…温度検出手段
Claims (8)
- 左右少なくとも一対の駆動輪をそれぞれ駆動する互いに独立した走行用のモータと、転舵機構に機械的に連結されていない操舵具の操作量を検出し前記転舵機構の転舵用モータにより左右の操舵輪を転舵させる操舵機構と、アクセル操作手段の駆動指令を、前記操舵具の操作量に応じて、前記左右の駆動輪のモータの制御手段に分配して与えるトルク配分手段とを備えた電気自動車において、
前記転舵用モータおよび操舵機構を含む操舵系の異常の検出によって、その異常による転舵不足を補うように、前記トルク配分手段による左右の駆動輪のモータに対するトルク指令の配分を変更する機能と、前記走行用のモータおよびこのモータの制御手段を含む車輪駆動系の異常の検出によって、その異常による左右両駆動輪の駆動バランスの変化量を補うように、前記転舵用モータによる転舵量を変更する機能とのいずれか一方または両方を有する異常時補完手段を設けたことを特徴とする電気自動車。 - 請求項1において、前記操舵系の異常を検出する操舵系異常検出手段を設け、前記異常時補完手段として、前記操舵系異常検出手段による異常の検出に応答して、その異常による転舵不足を補うように、前記トルク配分手段による左右の駆動輪のモータに対するトルク指令の配分を変更する異常対応トルク配分変更部を設けた電気自動車。
- 請求項1または請求項2において、前記車輪駆動系の異常を検出する駆動系異常検出手段を設け、前記異常時補完手段として、前記車輪駆動系異常検出手段による異常検出に応じて、その異常による左右両駆動輪の駆動バランスの変化量を補うように、前記操舵機構の転舵用モータの回転量を変更する異常対応転舵量変更部を設けた電気自動車。
- 請求項1ないし請求項3のいずれか1項において、前記転舵用モータまたはこの転舵用モータの駆動回路の温度を検出する温度検出手段の検出温度が閾値を超えた場合に、前記操舵系の異常と判定する操舵系異常検出手段を設けた電気自動車。
- 請求項1ないし請求項3のいずれか1項において、直進方向に対する車体の曲がり量を検出する手段、または操舵輪の転舵角度を検出する手段の検出値である曲がり量検出値と、前記操舵具の操作量とを比較し、前記曲がり量検出値と操作量とが、定められた範囲から外れたときに、前記操舵系の異常と判定する操舵系異常検出手段を設けた電気自動車。
- 請求項1ないし請求項5のいずれか1項において、前記走行用のモータまたはこの走行用モータの駆動回路の温度を検出する温度検出手段の検出温度が閾値を超えた場合に、前記車輪駆動系の異常と判定する駆動系異常検出手段を設けた電気自動車。
- 請求項1ないし請求項6のいずれか1項において、前記走行用のモータは、このモータと、前記駆動輪を支持する車輪用軸受と、前記モータの駆動を前記車輪用軸受に伝える減速機とでインホイールモータ駆動装置を構成する電気自動車。
- 請求項7において、前記減速機がサイクロイド減速機である電気自動車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011039410A JP5936306B2 (ja) | 2011-02-25 | 2011-02-25 | 電気自動車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011039410A JP5936306B2 (ja) | 2011-02-25 | 2011-02-25 | 電気自動車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012176643A true JP2012176643A (ja) | 2012-09-13 |
| JP5936306B2 JP5936306B2 (ja) | 2016-06-22 |
Family
ID=46978826
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011039410A Expired - Fee Related JP5936306B2 (ja) | 2011-02-25 | 2011-02-25 | 電気自動車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5936306B2 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014000832A (ja) * | 2012-06-15 | 2014-01-09 | Ntn Corp | 転舵装置の異常判断装置 |
| JP2015020667A (ja) * | 2013-07-22 | 2015-02-02 | トヨタ自動車株式会社 | 車線維持支援装置 |
| JP2015116917A (ja) * | 2013-12-18 | 2015-06-25 | 株式会社ジェイテクト | ステアリング装置 |
| WO2016031696A1 (ja) * | 2014-08-29 | 2016-03-03 | Ntn株式会社 | 車輪独立駆動式車両の駆動制御装置 |
| WO2016043077A1 (ja) * | 2014-09-17 | 2016-03-24 | Ntn株式会社 | 車両の駆動制御装置 |
| JP2018008654A (ja) * | 2016-07-15 | 2018-01-18 | 株式会社ジェイテクト | 車両制御装置 |
| JP2019187019A (ja) * | 2018-04-04 | 2019-10-24 | 本田技研工業株式会社 | 電動車両の制御装置 |
| JP2022009422A (ja) * | 2020-12-25 | 2022-01-14 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法、プログラム及び車両 |
| WO2022153828A1 (ja) * | 2021-01-12 | 2022-07-21 | 株式会社デンソー | 車両の駆動システム |
| WO2022262891A1 (de) * | 2021-06-14 | 2022-12-22 | Schaeffler Technologies AG & Co. KG | Elektrisch betreibbarer achsantriebsstrang, verfahren zum betrieb eines elektrisch betreibbaren achsantriebsstrangs, computerprogrammprodukt und steuereinheit |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007161191A (ja) * | 2005-12-16 | 2007-06-28 | Toyota Motor Corp | ステアリング制御装置および電動車両 |
| JP2010166740A (ja) * | 2009-01-17 | 2010-07-29 | Nissan Motor Co Ltd | 電気自動車の制御装置 |
-
2011
- 2011-02-25 JP JP2011039410A patent/JP5936306B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007161191A (ja) * | 2005-12-16 | 2007-06-28 | Toyota Motor Corp | ステアリング制御装置および電動車両 |
| JP2010166740A (ja) * | 2009-01-17 | 2010-07-29 | Nissan Motor Co Ltd | 電気自動車の制御装置 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014000832A (ja) * | 2012-06-15 | 2014-01-09 | Ntn Corp | 転舵装置の異常判断装置 |
| US9834213B2 (en) | 2013-07-22 | 2017-12-05 | Toyota Jidosha Kabushiki Kaisha | Lane keeping assist apparatus |
| JP2015020667A (ja) * | 2013-07-22 | 2015-02-02 | トヨタ自動車株式会社 | 車線維持支援装置 |
| CN105377657A (zh) * | 2013-07-22 | 2016-03-02 | 丰田自动车株式会社 | 车道保持辅助装置 |
| CN105377657B (zh) * | 2013-07-22 | 2018-04-10 | 丰田自动车株式会社 | 车道保持辅助装置 |
| JP2015116917A (ja) * | 2013-12-18 | 2015-06-25 | 株式会社ジェイテクト | ステアリング装置 |
| WO2016031696A1 (ja) * | 2014-08-29 | 2016-03-03 | Ntn株式会社 | 車輪独立駆動式車両の駆動制御装置 |
| WO2016043077A1 (ja) * | 2014-09-17 | 2016-03-24 | Ntn株式会社 | 車両の駆動制御装置 |
| JP2018008654A (ja) * | 2016-07-15 | 2018-01-18 | 株式会社ジェイテクト | 車両制御装置 |
| JP2019187019A (ja) * | 2018-04-04 | 2019-10-24 | 本田技研工業株式会社 | 電動車両の制御装置 |
| JP2022009422A (ja) * | 2020-12-25 | 2022-01-14 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法、プログラム及び車両 |
| JP7243788B2 (ja) | 2020-12-25 | 2023-03-22 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法、プログラム及び車両 |
| WO2022153828A1 (ja) * | 2021-01-12 | 2022-07-21 | 株式会社デンソー | 車両の駆動システム |
| JP2022108201A (ja) * | 2021-01-12 | 2022-07-25 | 株式会社デンソー | 車両の駆動システム |
| JP7435485B2 (ja) | 2021-01-12 | 2024-02-21 | 株式会社デンソー | 車両の駆動システム |
| WO2022262891A1 (de) * | 2021-06-14 | 2022-12-22 | Schaeffler Technologies AG & Co. KG | Elektrisch betreibbarer achsantriebsstrang, verfahren zum betrieb eines elektrisch betreibbaren achsantriebsstrangs, computerprogrammprodukt und steuereinheit |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5936306B2 (ja) | 2016-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5936306B2 (ja) | 電気自動車 | |
| JP5784930B2 (ja) | 電気自動車 | |
| JP5657426B2 (ja) | 電気自動車 | |
| JP5705585B2 (ja) | 電気自動車 | |
| JP5832868B2 (ja) | 電気自動車 | |
| WO2012114902A1 (ja) | 電気自動車 | |
| JP5886008B2 (ja) | 電気自動車のモータ制御装置 | |
| JP5657425B2 (ja) | 電気自動車 | |
| JP5731233B2 (ja) | 電気自動車 | |
| JP5735305B2 (ja) | 電気自動車 | |
| JP5731593B2 (ja) | 電気自動車 | |
| JP5731234B2 (ja) | 電気自動車 | |
| JP5781326B2 (ja) | 電気自動車 | |
| JP5731594B2 (ja) | 電気自動車 | |
| JP2013116029A (ja) | 電動車両制御装置・制御方法・および電動車両 | |
| JP5985724B2 (ja) | 電気自動車 | |
| JP5805406B2 (ja) | インホイールモータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130822 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140603 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140729 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150403 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150410 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20150605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160309 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160510 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5936306 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |