JP2012166579A - 状態判定装置、状態判定方法及びプログラム - Google Patents
状態判定装置、状態判定方法及びプログラム Download PDFInfo
- Publication number
- JP2012166579A JP2012166579A JP2011026597A JP2011026597A JP2012166579A JP 2012166579 A JP2012166579 A JP 2012166579A JP 2011026597 A JP2011026597 A JP 2011026597A JP 2011026597 A JP2011026597 A JP 2011026597A JP 2012166579 A JP2012166579 A JP 2012166579A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- load acting
- gravity
- center
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Emergency Alarm Devices (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】簡易な装置で、正確にドライバの状態を判定する。
【解決手段】ドライバの重心の変化に起因する特徴量に基づいて、ドライバの運転状態が属するクラスを判定する。ドライバの重心の変動は、ドライバの覚醒度との相関が高いと考えられる。このため、正確にドライバの状態を判定することができる。また、ドライバの状態の判定に用いる特徴量の算出には、荷重センサ211〜214からの出力を用いる。このため、装置の構造を簡易化することができる。
【選択図】図1
【解決手段】ドライバの重心の変化に起因する特徴量に基づいて、ドライバの運転状態が属するクラスを判定する。ドライバの重心の変動は、ドライバの覚醒度との相関が高いと考えられる。このため、正確にドライバの状態を判定することができる。また、ドライバの状態の判定に用いる特徴量の算出には、荷重センサ211〜214からの出力を用いる。このため、装置の構造を簡易化することができる。
【選択図】図1
Description
本発明は、状態判定装置、状態判定方法及びプログラムに関し、更に詳しくは、ドライバの状態を判定する状態判定装置、ドライバの状態を判定するための状態判定方法及びプログラムに関する。
近年、交通事故の死者数は減少傾向にあるものの、事故の発生件数自体は依然として高い水準で推移している。事故の原因は様々であるが、ドライバが漫然な状態(漫然状態)で車両の運転を行うことも、事故を誘発する原因の1つである。漫然状態は、運転中の会話や、携帯電話の使用など、ドライバが運転以外の行動を行うことにより、運転に対する注意力が散漫になる状態と、疲労や眠気などによってドライバの注意力が低下する状態とに概ね二分することができる。
疲労や眠気は、ドライバ自身での予防が困難である。このため、安全上の観点から、ドライバの居眠りや覚醒度の低下を正確に検出するためのシステムが種々提案されている(例えば特許文献1、特許文献2、及び非特許文献1参照)。
特許文献1に記載された装置は、ドライバの顔の画像を撮影することにより得た画像に基づいて、ドライバの瞼の開閉度合いや、開閉頻度を計測する。そして、計測結果を用いてドライバの眠気や疲労の程度を判定する。
特許文献2及び非特許文献1に記載された装置は、シートの座面や背もたれに設けられた体圧センサを用いて、ドライバの重心の変化を検出する。そして、検出結果から、ドライバの眠気や疲労の程度を判定する。
ヒューマンインタフェースシンポジウム2005論文集 Vol.1,pp.351−356,2005 体動情報に基づくドライバの漫然運転リアルタイム検出
しかしながら、上記特許文献1に記載された装置は、例えばドライバがサングラスを着用することによって撮影環境が変化すると、瞼の検出が可能な程度に鮮明な画像を撮影することができなくなる。この場合には、一時的にドライバの状態を正確に判定することができなくなるという問題がある。
また、特許文献2及び非特許文献2に記載された装置は、体圧センサによる検出結果を所定のパターンと比較することにより、ドライバの状態の判定を行う。このため、状態の判定を行う際に取り扱うデータ量が多くなってしまうという問題がある。また、この装置では、重心の検出にシート型体圧センサが用いられる。このシート型体圧センサは比較的高価である。このため、装置全体としての製造コストが高くなるという不都合がある。
本発明は、上述の事情の下になされたもので、簡易な装置で、正確にドライバの状態を判定することを目的とする。
上記目的を達成するため、本発明の第1の観点に係る状態判定装置は、
車両を運転するドライバの状態を判定する状態判定装置であって、
前記ドライバが着座するシートの着座部に作用する荷重を検出する検出手段と、
前記検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する算出手段と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する識別手段と、
前記識別手段の識別結果に基づいて、前記ドライバの状態が属するクラスを特定する特定手段と、
を備える。
車両を運転するドライバの状態を判定する状態判定装置であって、
前記ドライバが着座するシートの着座部に作用する荷重を検出する検出手段と、
前記検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する算出手段と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する識別手段と、
前記識別手段の識別結果に基づいて、前記ドライバの状態が属するクラスを特定する特定手段と、
を備える。
上記目的を達成するため、本発明の第2の観点に係る状態検出方法は、
車両を運転するドライバの状態を判定する状態判定方法であって、
前記ドライバが着座するシートの着座部に作用する荷重を検出する検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する工程と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する工程と、
前記識別の結果に基づいて、前記ドライバの状態が属するクラスを特定する工程と、
を含む。
車両を運転するドライバの状態を判定する状態判定方法であって、
前記ドライバが着座するシートの着座部に作用する荷重を検出する検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する工程と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する工程と、
前記識別の結果に基づいて、前記ドライバの状態が属するクラスを特定する工程と、
を含む。
上記目的を達成するため、本発明の第3の観点に係るプログラムは、
コンピュータに、
車両を運転するドライバが着座するシートの着座部に作用する荷重を検出する検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する手順と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する手順と、
前記識別の結果に基づいて、前記ドライバの状態が属するクラスを特定する手順と、
を実行させる。
コンピュータに、
車両を運転するドライバが着座するシートの着座部に作用する荷重を検出する検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する手順と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する手順と、
前記識別の結果に基づいて、前記ドライバの状態が属するクラスを特定する手順と、
を実行させる。
本発明によれば、ドライバの重心に関する特徴量に基づいて、運転状態の判定が行われる。ドライバの重心に関する特徴量は、ドライバの覚醒度との相関が高いと考えられる。このため、正確にドライバの状態を判定することができる。また、状態の判定に用いられる特徴量の算出には、荷重を検出する検出手段からの出力を用いることができる。このため、装置の構造を簡易化することが可能となる。
《第1の実施形態》
以下、本発明の第1の実施形態を、図面を参照しつつ説明する。図1は本実施形態に係る状態判定装置10の概略的な構成を示すブロック図である。状態判定装置10は、例えば自動車を運転するドライバの生体情報を取得する。そして、取得した生体情報に基づいてドライバの状態を判定する。この状態の判定は、眠気や疲労によりドライバが交通事故を誘発する状態にあるか否かを判定するものである。
以下、本発明の第1の実施形態を、図面を参照しつつ説明する。図1は本実施形態に係る状態判定装置10の概略的な構成を示すブロック図である。状態判定装置10は、例えば自動車を運転するドライバの生体情報を取得する。そして、取得した生体情報に基づいてドライバの状態を判定する。この状態の判定は、眠気や疲労によりドライバが交通事故を誘発する状態にあるか否かを判定するものである。
図1に示されるように、状態判定装置10は、ドライバが着座するシートに作用する荷重を検出する4つの荷重センサ211〜214、荷重センサ21による検出結果に基づく特徴量を出力する特徴量出力装置20、特徴量に基づいてドライバの運転状態を判定する判定装置30を備えている。
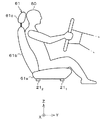
図2は、Y軸方向を進行方向とする車両を運転するドライバ60と、当該ドライバ60が着座するシート61を示す図である。シート61は、着座部61a、背もたれ61b、ヘッドレスト61cの3部分から構成されている。荷重センサ211〜214は、ドライバ60がシート61に着座することによって、着座部61aに作用する荷重を検出する。そして、検出した荷重に応じた電圧の出力信号を出力する。この荷重センサとしては、例えば特許第4460133号公報、特開2002−243528号公報、特許第3664986号公報、特許第3641434号公報、特許第4235368号公報に開示された荷重センサを用いることができる。
図3は、荷重センサ211〜214の、XY平面における配置を示す図である。図3に示されるように、荷重センサ211は、着座部61aの右前方のコーナーに配置されている。荷重センサ212は、着座部61aの右後方のコーナーに配置されている。荷重センサ213は、着座部61aの左前方のコーナーに配置されている。また、荷重センサ214は、着座部61aの左後方のコーナーに配置されている。
本実施形態では、荷重センサ211,212と荷重センサ213,214とのX軸方向の距離dxは416[mm]である。また、荷重センサ211,213と荷重センサ212,214とのY軸方向の距離dyは258[mm]である。
特徴量出力装置20は、CPU(Central Processing Unit)、CPUの作業領域となる主記憶部、CPUが実行するプログラムや処理結果を記憶する補助記憶部等から構成されている。この特徴量出力装置20は、荷重センサ211〜214からそれぞれ出力される出力信号の値V1〜V4を、例えばサンプリング周期20Hzでサンプリングして時系列的に記憶する。
また、特徴量出力装置20は、出力信号のサンプリングと並行して、荷重センサ211〜214からそれぞれ出力される出力信号の値V1〜V4と、着座部61aの中心を原点Oとするxy座標系における荷重センサ21の位置座標に基づいて、xy座標系におけるドライバ60の重心の位置座標(Dx,Dy)を順次算出し記憶する。また、特徴量出力装置20は、荷重センサ211,212からの出力信号の値V1,V2の和S12と、荷重センサ212,213からの出力信号の値V2,V3の和S23とを順次算出し記憶する。
そして、特徴量出力装置20は、算出した位置座標(Dx,Dy)に基づいて、単位時間あたりの重心の変動回数N、単位時間あたりのx座標Dxの標準偏差、単位時間あたりのx座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の単位時間あたりの標準偏差、値V2,V3の和S23の単位時間あたりの標準偏差を順次算出する。
変動回数Nは、例えば1分間に、重心変動が生じた回数である。この変動回数は、変動幅が0.02インチ〜0.1インチ以内である場合にカウントされる。
x座標Dxの標準偏差は、例えば1分間にサンプリングされる出力信号V1〜V4に基づいて順次算出される重心のx座標Dxの標準偏差である。上述したように、特徴量出力装置20のサンプリング周期は20Hzであるため、最大で1200(20×60)のx座標Dxから標準偏差が算出される。
x座標Dxについての逐次差分の標準偏差は、例えば1分間にサンプリングされる出力信号V1〜V4に基づいて順次算出される重心のx座標Dxについての逐次差分の標準偏差である。逐次差分は、例えばx座標がDx1からDx2へ変化した場合には、Dx2からDx1を減じることで算出される。
値V1,V2の和S12の標準偏差は、例えば1分間にサンプリングされた出力信号V1,V2の和S12(=V1+V2)の標準偏差である。また、値V2,V3の和S23の標準偏差は、例えば1分間にサンプリングされた出力信号V2,V3の和S23(=V2+V3)の標準偏差である。
特徴量出力装置20は、変動回数N、x座標Dxの標準偏差、x座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の標準偏差、値V2,V3の和S23の標準偏差を5つの特徴量a1〜a5としてそれぞれ算出すると、この特徴量a1〜a5を入力情報x(a1,a2,a3,a4,a5)として、判定装置30へ出力する。以下、説明の便宜上、入力情報x(a1,a2,a3,a4,a5)については、単に入力情報xと表示する。
判定装置30は、例えば3つのクラス(クラス1、クラス2、クラス3)のうちから、ドライバ60の状態が属するクラスを判定する装置である。3つのクラスは、例えばドライバ60の活性度を指標として区分されたものである。
上述の活性度は、ドライバ60が外部からの入力に対して行動を起こす場合に、その行動を起こすまでの時間(反応時間)の長短などによって定義することができる。反応時間は、眠気や、注意力の低下などによって、長くなる傾向がある。本実施形態では、例えば、さまざまな状況でドライバ60の反応時間を計測し、最も反応時間が短いときのドライバ60の状態(通常状態)をクラス1とし、最も反応時間が長いときのドライバ60の状態(最漫然状態)をクラス3とし、クラス1とクラス3との間の状態(漫然状態)をクラス2とする。
図4は識別ユニット40のブロック図である。図4に示されるように、識別ユニット40は、符号器41と、6個の識別器421〜426と、復号器43とを含んで構成されている。
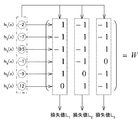
符号器41は、次式(1)で示される符号表Wを用いて符号化処理を行う。なお、pは識別器の個数であり、Gはクラスの数である。また、符号表Wの各行には、1と−1の双方が含まれる。本実施形態では、上述したように運転状態が属するクラスの数は3であり、識別器の数は6である。このため、次式(1)の一般式で示される符号表Wは、具体的には次式(2)に示されるように、6行3列のマトリクス状に配置された18の要素から構成される。
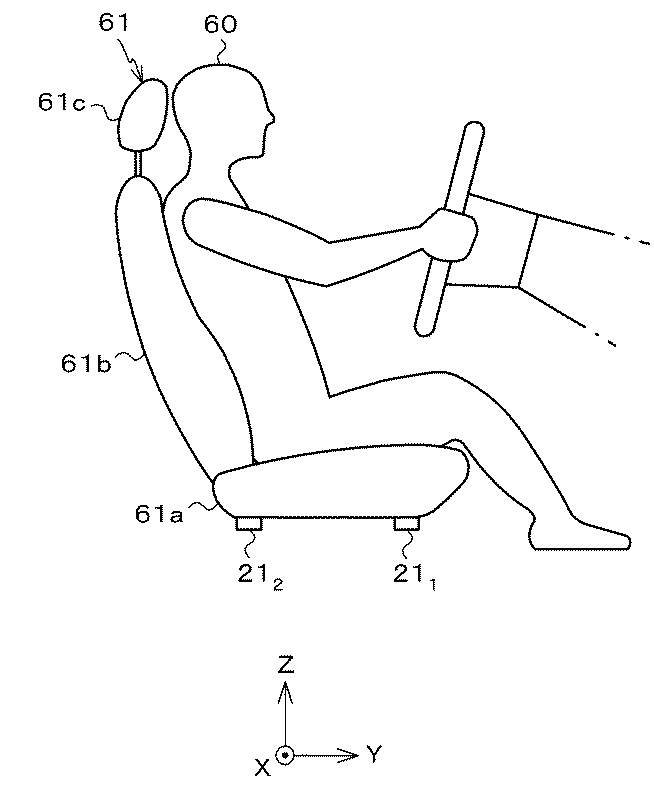
図5を参照するとわかるように、符号表Wの各行の3つの要素は、左から右に向かって順に、それぞれクラス1、クラス2、クラス3に対応している。そして、3つのクラスは、値が1の要素に対応するクラスからなる第1グループと、値が−1の要素に対応するクラスからなる第2グループに分類される。なお、各グループのクラスの数は1つであっても複数(2つ)であってもよい。また、値が0の要素に対応するクラスは、分類から除外される。
例えば、符号表Wの1行目の3つの要素は、クラス1が第1グループに分類され、クラス2及びクラス3が第2グループに分類されることを意味する。同様に、符号表Wの2行目の3つの要素は、クラス2が第1グループに分類され、クラス1及びクラス3が第2グループに分類されることを意味する。また、符号表Wの3行目の3つの要素は、クラス3が第1グループに分類され、クラス1及びクラス2が第2グループに分類されることを意味する。また、符号表Wの4行目の3つの要素は、クラス1が第1グループに分類され、クラス2が第2グループに分類されることを意味する。また、符号表Wの5行目の3つの要素は、クラス1が第1グループに分類され、クラス3が第2グループに分類されることを意味する。また、符号表Wの6行目の3つの要素は、クラス2が第1グループに分類され、クラス3が第2グループに分類されることを意味する。
符号器41は、入力情報xが入力されると、符号表Wの1行目の3つの要素からなるコード1[1、−1、−1]と入力情報xとの関連づけを行う。そして、コード1が関連づけられた入力情報xを識別器421へ出力する。
同様に、符号器41は、符号表Wの2行目〜6行目それぞれの3つの要素からなるコード2[−1、1、−1]、コード3[−1、−1、1]、コード4[1、−1、0]、コード5[1、0、−1]、コード6[0、1、−1]それぞれと入力情報xとの関連付けを行う。そして、コード2〜コード6がそれぞれ関連づけられた入力情報xを、それぞれ識別器422〜426へ出力する。
識別器421〜426は、例えばAdaBoostによる学習済みの二値判別器である。これらの識別器421〜426は、コード1〜6がそれぞれ関連づけられた入力情報xが入力されると、コード1〜6に基づいて、クラス1〜3を2つのグループに分類する。そして、入力情報xに基づいて、2つのグループのうちからドライバ60の運転状態が属するグループを識別し、識別した結果と、信頼度を出力する。
例えば、識別器421は、コード1[1、−1、−1]に基づいて、クラス1を第1グループに分類し、クラス2及びクラス3を第2グループに分類する。そして、識別器421は、入力情報xに基づいて、ドライバ60の運転状態が、第1グループに属するか、或いは第2グループに属するかを識別し、識別結果に応じた出力値h1(x)を出力する。
この出力値h1(x)の符号は、コード1の要素の符号と対応している。そして、出力値h1(x)の符号が+(>0)である場合には、ドライバ60の運転状態は、値が1である要素に対応するクラス1から構成される第1グループに属していると考えることができる。一方、出力値h1(x)の符号が−(<0)である場合には、ドライバ60の運転状態は、値が−1である要素に対応するクラス2及びクラス3から構成される第2グループに属していると考えることができる。また、出力値h1(x)の絶対値は、識別結果としての信頼度を示す。
同様に、識別器422〜426それぞれは、コード2〜6に基づいて、クラス1〜3を第1グループに属するクラスと、第2グループに属するクラスに分類する。そして、識別器422〜426それぞれは、入力情報xに基づいて、ドライバ60の運転状態が、第1グループに属するか、或いは第2グループに属するかを識別し、識別結果に応じた出力値h2(x)〜h6(x)を出力する。
復号器43は、上記式(2)で示される符号表Wを用いて複合化処理を行う。符号表Wの1列目にある6つの要素それぞれは、クラス1が、第1グループ及び第2グループのうちのいずれのグループに分類されたかを表している。また、符号表Wの2列目にある6つの要素それぞれは、クラス2が、第1グループ及び第2グループのうちのいずれのグループに分類されたかを表している。また、符号表Wの3列目にある6つの要素それぞれは、クラス3が、第1グループ及び第2グループのうちのいずれのグループに分類されたかを表している。
また、一般に識別器421〜426からの出力値は、識別平面からのユークリッド距離を表し、この値は識別結果の信頼度を表す。したがって、上述のようにグループ1が、値が1である要素によって規定され、グループ2が、値が−1である要素によって規定されている場合には、識別器421〜426からの出力値hn(x)は、その符号が正でその値が大きいほど、ドライバ60の運転状態が第1グループに属する傾向が強いことを意味する。また、識別器421〜426からの出力値hn(x)は、その符号が負でその値が小さいほど、ドライバ60の運転状態が第2グループに属する傾向が強いことを意味する。
そこで、復号器43は、各識別器からの出力値と、符号表Wの列方向に配列された要素を用いて、クラス1〜3それぞれに対応する損失値L1〜L3を算出する。この損失値L1〜L3の算出は、次式(3)で示される関数が用いられる。
図6を参照するとわかるように、例えば、出力値h1(x)〜h6(x)それぞれが、−2、−7、0.5、−1、−9、12である場合には、クラス1に対応した損失値L1は、次式(4)で示される。
復号器43は、同様の要領で、クラス2、クラス3にそれぞれ対応する損失値L2、損失値L3をそれぞれ算出すると、算出した損失値L1〜L3をクラス判定ユニット50へ出力する。
図1に戻り、判定装置30のクラス判定ユニット50は、識別ユニット40の復号器43から出力された損失値L1〜L3のうちから、最も値が小さい損失値に対応したクラスを、ドライバ60の運転状態が属するクラスと判定し、判定結果を出力する。例えば、クラス1に対応する損失値L1が7018、クラス2に対応する損失値L2が−161667、クラス3に対応する損失値L3が153546である場合には、クラス判定ユニット50は、損失が最小となった損失値L2に対応するクラス2を、ドライバ60の運転状態が属するクラスと判定して、判定結果を外部へ出力する。
以上説明したように、本実施形態に係る状態判定装置10では、ドライバ60の重心の変化に起因する特徴量に基づいて、ドライバ60の運転状態が属するクラスが判定される。このクラスは、ドライバ60の活性度を指標としてドライバ60の運転状態が複数のクラスに区分されたものの1つである。したがって、ドライバ60が属するクラスに基づいて、ドライバ60の活性度がどの程度低下しているかを、覚醒度の低下の度合い別に検出することができる。これにより、ドライバ60にとってより適切な運転支援を提供することが可能となる。
また、居眠り運転時のドライバ60の生理的な行動としては、座り直しの増加や、姿勢が前傾することなどが知られており、ドライバ60の重心の変動は、ドライバ60の覚醒度との相関が高いと考えられる。例えば、図7は、x軸方向の重心の変位と、眠気レベルとの関係を示す図である。実線はx軸方向の重心の変位の時間的な推移を示し、一点鎖線は眠気レベルの時間的な推移を示している。図7に示されるように、眠気レベルが増加すると、これに比例するように、x軸方向の重心の変位のばらつきが大きくなることがわかる。このx軸方向の変位のばらつきは、車両から伝わる振動等によって、ドライバ60の身体が左右に揺らぐことにより生じるものである。
本実施形態に係る状態判定装置10は、ドライバ60の重心の変動に起因する特徴量a1〜a5として、変動回数N、x座標Dxの標準偏差、x座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の標準偏差、値V2,V3の和S12の標準偏差をそれぞれ算出する。そして、この特徴量a1〜a5に基づいて、ドライバ60が属するクラスを判断する。こたのめ、正確にドライバ60の状態を判定することができる。
本実施形態では、シート61の着座部61aに配置された荷重センサ211〜214からの出力に基づいて算出した変動回数N、x座標Dxの標準偏差、x座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の標準偏差、及び値V2,V3の和S23の標準偏差を特徴量として用いる。このため、例えば心拍や、瞼の開度等を生体情報として用いる装置に比べて、装置の構造を簡易化することができる。これにより、状態判定装置10の製造コストを削減することが可能となる。
また、荷重センサからの出力は、ドライバ60がサングラスを着用したり、周囲の環境が変化した場合にも影響をうけることがなく、ロバスト性が高い。このため、ドライバ60の運転状態の判定を、ドライバ60の顔画像を用いて行う場合に比べて、正確に行うことができる。
本実施形態では、変動回数Nの他に、x座標Dxの標準偏差、x座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の標準偏差、及び値V2,V3の和S23の標準偏差を特徴量として用いる。これにより、ドライバ60の体型に起因する判定誤差を少なくすることができる。
本実施形態では、変動回数N、x座標Dxの標準偏差、x座標Dxについての逐次差分の標準偏差の他に、着座部61aの右側に配置された荷重センサ211,212からの出力信号の値V1,V2の和S12の標準偏差と、着座部61aの右後ろのコーナーに配置された荷重センサ212からの出力信号の値V2と、左前コーナーに配置された荷重センサ213からの出力信号の値V3との和S23の標準偏差とを特徴量として用いる。こたのめ、例えば、ドライバ60がアクセルペダルを操作することによって、重心がx軸方向に変化しても、精度よくドライバ60の運転状態を判定することができる。なお、例えば自動追従装置等を用いることで、ドライバ60がアクセルペダルを操作することなく、車両の運転を継続する場合には、ドライバ60の重心位置は、x軸方向に関しほぼ原点に一致した状態となる。
本実施形態では、識別器421〜426は、AdaBoostによる学習済みの二値判別器であるものとして説明した。しかしながら、本発明はこれに限定されるものではなく、識別器421〜426は、例えばSVM(Support Vector Machine)などの二値判別器であってもよい。
本実施形態では、ドライバ60の現在の運転状態が、3つのクラスのうちのどのクラスに属するかを判定する場合について説明した。しかしながら、本発明はこれに限定されるものではなく、ドライバ60の運転状態を、活性度を指標として4つ以上のクラスに区分し、現在の運転状態がどのクラスに属するかを判定することとしてもよい。
例えば、ドライバ60の運転状態を、新エネルギー・産業技術総合開発機構(NEDO)の定義にしたがって、全く眠くなさそうな状態、やや眠そうな状態、眠そうな状態、かなり眠そうな状態、非常に眠そうな状態に対応する5つのクラスに区分し、ドライバ60の現在の運転状態がどのクラスに属するかを判定することとしてもよい。
なお、識別器の個数をp、クラスの数をGとすると、符号表WのサイズWSIZEは次式で求めることができる。
本実施形態では、ドライバ60の重心の位置座標を、4つの荷重センサ21からの出力に基づいて算出した。これに限らず、ドライバ60の重心を同一直線上にない3つの荷重センサ21を用いて算出してもよい。また、5つ以上の荷重センサからの出力に基づいてドライバ60の重心を算出してもよい。
また、荷重センサとして、シート状のセンサを着座部61aの座面に配置し、当該センサからの出力に基づいて、着座部61aに着座するドライバ60の重心を算出してもよい。
本実施形態では、ドライバ60の運転状態が、外部からの入力に対するドライバ60の反応時間によって定義されている場合について説明した。これに限らず、ドライバ60の運転状態は、例えば、顔画像に基づく瞼の開度や開閉回数に基づいて、定義されていてもよい。
《第2の実施形態》
次に、本発明の第2の実施形態を、図面を参照しつつ説明する。なお、第1の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
次に、本発明の第2の実施形態を、図面を参照しつつ説明する。なお、第1の実施形態と同一又は同等の構成については、同等の符号を用いるとともに、その説明を省略又は簡略する。
本実施形態に係る状態判定装置10は、判定装置30が、一般的なコンピュータ、又はマイクロコンピュータなどの装置と同様の構成によって実現されている点で、第1の実施形態に係る状態判定装置10と相違している。
図8は、状態判定装置10の物理的な構成を示すブロック図である。図8に示されるように、状態判定装置10は、特徴量出力装置20と、コンピュータからなる判定装置30とから構成されている。
判定装置30は、CPU(Central Processing Unit)30a、主記憶部30b、補助記憶部30c、表示部30d、入力部30e、インターフェイス部30f、及び上記各部を相互に接続するシステムバス30gを含んで構成されている。
CPU30aは、補助記憶部30cに記憶されているプログラムに従って、特徴量出力装置20によって取得された入力情報xに対して、後述する処理を実行する。
主記憶部30bは、RAM(Random Access Memory)等を含んで構成され、CPU30aの作業領域として用いられる。
補助記憶部30cは、ROM(Read Only Memory)、磁気ディスク、半導体メモリ等の不揮発性メモリを含んで構成されている。この補助記憶部30cは、CPU30aが実行するプログラム、及び各種パラメータなどを記憶している。また、特徴量出力装置20から出力される入力情報x、及びCPU30aによる処理結果などを含む情報を順次記憶する。
表示部30dは、CRT(Cathode Ray Tube)またはLCD(Liquid Crystal Display)などを含んで構成され、CPU30aの処理結果を表示する。
入力部30eは、入力キーやポインティングデバイスを含んで構成されている。オペレータの指示は、この入力部30eを介して入力され、システムバス30gを経由してCPU30aに通知される。
インターフェイス部30fは、シリアルインターフェイスまたはLAN(Local Area Network)インターフェイス等を含んで構成されている。特徴量出力装置20は、インターフェイス部30fを介してシステムバス30gに接続される。
図9のフローチャートは、CPU30aによって実行されるプログラムの一連の処理アルゴリズムに対応している。以下、図9を参照しつつ、判定装置30が実行する処理について説明する。なお、この処理は、CPU30aが、特徴量出力装置20に生体情報の取得を指示し、特徴量出力装置20から入力情報xが出力された後に実行される。
まず、最初のステップS101では、CPU30aは、符号表Wの1行目〜6行目それぞれの3つの要素からなる、コード[1、−1、−1]、コード2[−1、1、−1]、コード3[−1、−1、1]、コード4[1、−1、0]、コード5[1、0、−1]、コード6[0、1、−1]それぞれと入力情報xとの関連付けを行う。
次のステップS102では、CPU30aは、コード1〜6に基づいて、クラス1〜3を第1グループに属するクラスと、第2グループに属するクラスに分類する。そして、CPU30aは、入力情報xに基づいて、ドライバ60の運転状態が、第1グループに属するか、第2グループに属するかを識別し、識別結果に応じた識別値h1(x)〜h6(x)を算出する。
次のステップS103では、CPU30aは、識別値h1(x)〜h6(x)と、符号表Wの列方向に配列された要素を用いて、クラス1〜3それぞれに対応する損失値L1〜L3を算出する。図6を参照するとわかるように、例えば、識別値h1(x)〜h6(x)それぞれが、−2、−7、0.5、−1、−9、12である場合には、クラス1に対応した損失値L1は、上記式(4)のように計算される。
次のステップS104では、CPU30aは、算出した損失値L1〜L3のうちから、最も値が小さい損失値に対応したクラスを、ドライバ60の運転状態が属するクラスとして検出する。例えば、クラス1に対応する損失値L1が7018、クラス2に対応する損失値L2が−161667、クラス3に対応する損失値L3が153546である場合には、CPU30aは、損失が最小となった損失値L2に対応するクラス2を、ドライバ60の運転状態が属するクラスとして検出する。
次のステップS105では、CPU30aは、検出したクラスに関する情報を外部装置などへ出力する。以降、CPU30aは、ステップS101〜ステップS105までの処理を繰り返し実行する。
以上説明したように、本実施形態に係る状態判定装置10では、ドライバ60の重心の変化に起因する特徴量に基づいて、ドライバ60の運転状態が属するクラスが判定される。このクラスは、ドライバ60の活性度を指標としてドライバ60の運転状態が複数のクラスに区分されたものの1つである。したがって、ドライバ60が属するクラスに基づいて、ドライバ60の活性度がどの程度低下しているかを、覚醒度の低下の度合い別に検出することができる。これにより、ドライバ60にとってより適切な運転支援を提供することが可能となる。
本実施形態に係る状態判定装置10は、ドライバ60の重心の変動に起因する特徴量a1〜a5として、変動回数N、x座標Dxの標準偏差、x座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の標準偏差、値V2,V3の和S23の標準偏差をそれぞれ算出する。そして、この特徴量a1〜a5に基づいて、ドライバ60が属するクラスを判断する。こたのめ、正確にドライバ60の覚醒度を判定することができる。
以上、本発明の実施形態について説明したが、本発明は上記実施形態によって限定されるものではない。
例えば、上記実施形態では、単位時間あたりの重心の変動回数N、単位時間あたりのx座標Dxの標準偏差、単位時間あたりのx座標Dxについての逐次差分の標準偏差、値V1,V2の和S12の単位時間あたりの標準偏差、値V2,V3の和S23の単位時間あたりの標準偏差を、特徴量として用いることにより、ドライバの状態を判定した。
これに限らず、例えば自動追従装置等によって車両の運転がアシストされ、ドライバによるアクセルペダルやブレーキペダルの操作頻度が少ない場合や、アクセルペダル等の操作がされない状態のときには、上述の特徴量以外の特徴量を用いて、ドライバの状態を判定してもよい。
この場合には、荷重センサ212,213からの出力信号の値V2,V3の積の単位時間あたりの平均値、荷重センサ214からの出力信号の値V4の単位時間当たりの平均値、荷重センサ213,214からの出力信号の値V3,V4の差の単位時間あたりの平均値、荷重センサ213,214からの出力信号の値V3,V4の商の単位時間あたりの平均値、ドライバの重心のy座標の単位時間あたりの総和、ドライバの重心のy座標の単位時間あたりの平均値のうちのいずれかの特徴量を用いて、ドライバの状態を判定してもよい。また、上記特徴量を組み合わせて、或いは全部の特徴量を用いて、ドライバの状態を判定してもよい。
上記実施形態では、図3に示されるように、荷重センサ211,212と、荷重センサ213,214がy軸に平行な軸上に配置され、荷重センサ211,213と、荷重センサ212,214がx軸に平行な軸上に配置されている。この配置は一例であり、荷重センサ211〜214は、例えば図10に示されるように、着座部61aの中心を包囲するように配置されていればよい。
上記各実施形態では、損失値を指数関数で計算したが、これに限らず、例えば、シグモイド関数等を用いて算出してもよい。
上記各実施形態に係る判定装置30の機能は、専用のハードウェアによっても、また、通常のコンピュータシステムによっても実現することができる。
第2の実施形態において判定装置30の補助記憶部30cに記憶されているプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータで読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールすることにより、上述の処理を実行する装置を構成することとしてもよい。
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するようにしても良い。
また、プログラムは、通信ネットワークを介して転送しながら起動実行することとしてもよい。
また、プログラムは、全部又は一部をサーバ装置上で実行させ、その処理に関する情報を通信ネットワークを介して送受信しながら、上述の画像処理を実行することとしてもよい。
上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等しても良い。
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。
本発明の状態判定装置、状態検出方法及びプログラムは、被監視者の状態を検出するのに適している。
10 状態判定装置
20 特徴量出力装置
21 荷重センサ
30 判定装置
30a CPU
30b 主記憶部
30c 補助記憶部
30d 表示部
30e 入力部
30f インターフェイス部
30g システムバス
40 識別ユニット
41 符号器
42 識別器
43 復号器
50 クラス判定ユニット
60 ドライバ
61 シート
61a 着座部
61b 背もたれ
61c ヘッドレスト
O 原点
20 特徴量出力装置
21 荷重センサ
30 判定装置
30a CPU
30b 主記憶部
30c 補助記憶部
30d 表示部
30e 入力部
30f インターフェイス部
30g システムバス
40 識別ユニット
41 符号器
42 識別器
43 復号器
50 クラス判定ユニット
60 ドライバ
61 シート
61a 着座部
61b 背もたれ
61c ヘッドレスト
O 原点
Claims (10)
- 車両を運転するドライバの状態を判定する状態判定装置であって、
前記ドライバが着座するシートの着座部に作用する荷重を検出する検出手段と、
前記検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する算出手段と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する識別手段と、
前記識別手段の識別結果に基づいて、前記ドライバの状態が属するクラスを特定する特定手段と、
を備える状態判定装置。 - 前記算出手段は、
単位時間内に前記重心が変動した回数を、前記特徴量として算出する請求項1に記載の状態判定装置。 - 前記算出手段は、
前記車両の進行方向に直交する方向へ、前記重心が変動した回数の標準偏差を、前記特徴量として算出する請求項1又は2に記載の状態判定装置。 - 前記算出手段は、
前記車両の進行方向に直交する方向に関する前記重心の位置を、所定の周期で検出し、検出した前記重心の位置の差の標準偏差を、前記特徴量として算出する請求項1乃至3のいずれか一項に記載の状態判定装置。 - 前記検出手段は、
前記重心の右側の第1位置に作用する荷重と、前記重心の右側で、前記第1位置よりも後方の第2位置に作用する荷重とを検出し、
前記算出手段は、
前記第1位置に作用する荷重と、前記第2位置に作用する荷重との和の標準偏差を、前記特徴量として算出する請求項1乃至4のいずれか一項に記載の状態判定装置。 - 前記検出手段は、
前記重心の右側の第2位置に作用する荷重と、前記重心の左側で、前記第2位置よりも前方の第3位置に作用する荷重とを検出し、
前記算出手段は、
前記第2位置に作用する荷重と、前記第3位置に作用する荷重との和の標準偏差を、前記特徴量として算出する請求項1乃至5のいずれか一項に記載の状態判定装置。 - 前記検出手段は、
前記ドライバの右側の第1位置に作用する荷重と、前記ドライバの右側で、前記第1位置よりも後方の第2位置に作用する荷重と、前記ドライバの左側で、前記第2位置よりも前方の第3位置に作用する荷重と、前記ドライバの左側で、前記第3位置よりも後方の第4位置に作用する荷重とを検出し、
前記算出手段は、
前記第3位置に作用する荷重と、前記2位置に作用する荷重の積の単位時間当たりの平均値、
前記第4位置に作用する荷重の平均値、
前記第3位置に作用する荷重と、前記第4位置に作用する荷重との差の平均値、
前記第3位置に作用する荷重と、前記第4位置に作用する荷重との商の平均値、
前記車両の進行方向に関する前記重心の位置の総和、
及び前記車両の進行方向に関する前記重心の位置の平均値のうちの数なくとも1つを特徴量として算出する請求項1に記載の状態判定装置。 - 前記検出手段は、前記着座部を支持する支持部材の変形量に基づいて、前記着座部に作用する前記荷重を検出する請求項1乃至7のいずれか一項に記載の状態判定装置。
- 車両を運転するドライバの状態を判定する状態判定方法であって、
前記ドライバが着座するシートの着座部に作用する荷重を検出する検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する工程と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する工程と、
前記識別の結果に基づいて、前記ドライバの状態が属するクラスを特定する工程と、
を含む状態判定方法。 - コンピュータに、
車両を運転するドライバが着座するシートの着座部に作用する荷重を検出する検出手段からの出力に基づいて、前記ドライバの重心に関する情報を、特徴量として算出する手順と、
前記特徴量を入力値とし前記ドライバの活性度合いを指標として定められた複数のクラスが分類される第1グループと第2グループのうち、前記ドライバの状態が属する前記グループを識別する手順と、
前記識別の結果に基づいて、前記ドライバの状態が属するクラスを特定する手順と、
を実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011026597A JP2012166579A (ja) | 2011-02-09 | 2011-02-09 | 状態判定装置、状態判定方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011026597A JP2012166579A (ja) | 2011-02-09 | 2011-02-09 | 状態判定装置、状態判定方法及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012166579A true JP2012166579A (ja) | 2012-09-06 |
Family
ID=46971188
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011026597A Pending JP2012166579A (ja) | 2011-02-09 | 2011-02-09 | 状態判定装置、状態判定方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012166579A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017146788A (ja) * | 2016-02-17 | 2017-08-24 | いすゞ自動車株式会社 | 異常判定装置および異常判定方法 |
| WO2018096913A1 (ja) * | 2016-11-24 | 2018-05-31 | マツダ株式会社 | 運転者体調検知装置 |
| WO2018180331A1 (ja) * | 2017-03-28 | 2018-10-04 | 国立大学法人九州工業大学 | 運転者状態検知装置 |
| WO2019182033A1 (ja) * | 2018-03-22 | 2019-09-26 | 国立大学法人九州工業大学 | 居眠り検出装置 |
| KR102093452B1 (ko) * | 2019-04-23 | 2020-03-25 | (주)대풍이브이자동차(Ev) | 운전석 착석 감지를 통해 차량의 시동을 제어함으로써 운전자 보호가 가능한 차량용 안전 보조 장치 및 그 동작 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002008159A (ja) * | 2000-06-27 | 2002-01-11 | Isuzu Motors Ltd | ドライバ状態判定装置 |
| JP2008059056A (ja) * | 2006-08-29 | 2008-03-13 | Hino Motors Ltd | 覚醒度検出装置 |
| JP2009128106A (ja) * | 2007-11-21 | 2009-06-11 | Aisin Seiki Co Ltd | 車両用シート荷重検出装置 |
| JP2011018240A (ja) * | 2009-07-09 | 2011-01-27 | Aisin Seiki Co Ltd | 状態検出装置、状態検出方法及びプログラム |
-
2011
- 2011-02-09 JP JP2011026597A patent/JP2012166579A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002008159A (ja) * | 2000-06-27 | 2002-01-11 | Isuzu Motors Ltd | ドライバ状態判定装置 |
| JP2008059056A (ja) * | 2006-08-29 | 2008-03-13 | Hino Motors Ltd | 覚醒度検出装置 |
| JP2009128106A (ja) * | 2007-11-21 | 2009-06-11 | Aisin Seiki Co Ltd | 車両用シート荷重検出装置 |
| JP2011018240A (ja) * | 2009-07-09 | 2011-01-27 | Aisin Seiki Co Ltd | 状態検出装置、状態検出方法及びプログラム |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017146788A (ja) * | 2016-02-17 | 2017-08-24 | いすゞ自動車株式会社 | 異常判定装置および異常判定方法 |
| WO2018096913A1 (ja) * | 2016-11-24 | 2018-05-31 | マツダ株式会社 | 運転者体調検知装置 |
| JP2018083536A (ja) * | 2016-11-24 | 2018-05-31 | マツダ株式会社 | 運転者体調検知装置 |
| WO2018180331A1 (ja) * | 2017-03-28 | 2018-10-04 | 国立大学法人九州工業大学 | 運転者状態検知装置 |
| CN110476194A (zh) * | 2017-03-28 | 2019-11-19 | 国立大学法人九州工业大学 | 驾驶员状态探测装置 |
| JPWO2018180331A1 (ja) * | 2017-03-28 | 2020-02-06 | 国立大学法人九州工業大学 | 運転者状態検知装置 |
| WO2019182033A1 (ja) * | 2018-03-22 | 2019-09-26 | 国立大学法人九州工業大学 | 居眠り検出装置 |
| KR102093452B1 (ko) * | 2019-04-23 | 2020-03-25 | (주)대풍이브이자동차(Ev) | 운전석 착석 감지를 통해 차량의 시동을 제어함으로써 운전자 보호가 가능한 차량용 안전 보조 장치 및 그 동작 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5444898B2 (ja) | 状態検出装置、状態検出方法及びプログラム | |
| US11535280B2 (en) | Method and device for determining an estimate of the capability of a vehicle driver to take over control of a vehicle | |
| Xing et al. | Identification and analysis of driver postures for in-vehicle driving activities and secondary tasks recognition | |
| Liang et al. | Real-time detection of driver cognitive distraction using support vector machines | |
| US9694680B2 (en) | System and method for determining drowsy state of driver | |
| JP5585648B2 (ja) | 覚醒度判定装置、覚醒度判定方法及びプログラム | |
| JP5423872B2 (ja) | 生体状態判定装置 | |
| JP2012166579A (ja) | 状態判定装置、状態判定方法及びプログラム | |
| WO2021095153A1 (ja) | ドライバー異常対応システム、ドライバー異常対応方法、及びプログラム | |
| Ding et al. | Estimation of driver's posture using pressure distribution sensors in driving simulator and on-road experiment | |
| JP6731481B2 (ja) | 車両の搭乗者の少なくとも1つの目の開眼データを分類する方法および装置、および、車両の搭乗者の眠気および/またはマイクロスリープを検出する方法および装置 | |
| KR20160062521A (ko) | 목디스크 예방시스템 및 방법 | |
| CN111797784B (zh) | 驾驶行为监测方法、装置、电子设备及存储介质 | |
| JP6459856B2 (ja) | 車両運転支援装置、車両運転支援方法、およびプログラム | |
| JP6304075B2 (ja) | 故障判定装置 | |
| JP5627511B2 (ja) | 状態推定装置、状態推定方法及びプログラム | |
| JP6772775B2 (ja) | 運転支援装置および運転支援方法 | |
| CN109955740B (zh) | 用于测量车辆中的驾驶员的面部的方向的系统和方法 | |
| JP5917932B2 (ja) | 状態推定装置、状態推定方法及びプログラム | |
| JP6418225B2 (ja) | 運転者体調検知装置 | |
| Sofi et al. | Drowsiness and fatigue detection using multi-feature fusion | |
| CN113221734A (zh) | 影像识别方法及装置 | |
| JP2021129700A (ja) | 基準値決定装置及び基準値決定方法 | |
| JP6692610B2 (ja) | 検出プログラム、検出方法および検出装置 | |
| Ryu et al. | Development of driver-state estimation algorithm based on Hybrid Bayesian Network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141125 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150407 |