JP2012016244A - 単相交流同期モータおよび単相直流ブラシレスモータ - Google Patents
単相交流同期モータおよび単相直流ブラシレスモータ Download PDFInfo
- Publication number
- JP2012016244A JP2012016244A JP2010153234A JP2010153234A JP2012016244A JP 2012016244 A JP2012016244 A JP 2012016244A JP 2010153234 A JP2010153234 A JP 2010153234A JP 2010153234 A JP2010153234 A JP 2010153234A JP 2012016244 A JP2012016244 A JP 2012016244A
- Authority
- JP
- Japan
- Prior art keywords
- phase
- pole
- reverse torque
- angle
- synchronous motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001360 synchronised effect Effects 0.000 title claims abstract description 139
- 230000005415 magnetization Effects 0.000 claims abstract description 123
- 230000002441 reversible effect Effects 0.000 description 148
- 238000010586 diagram Methods 0.000 description 23
- 238000011156 evaluation Methods 0.000 description 21
- 230000004907 flux Effects 0.000 description 11
- 238000004519 manufacturing process Methods 0.000 description 11
- 239000007787 solid Substances 0.000 description 9
- 230000003111 delayed effect Effects 0.000 description 7
- 230000010354 integration Effects 0.000 description 7
- 238000005259 measurement Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000003973 paint Substances 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images



























Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
【課題】単相交流同期モータを、様々な負荷条件下においても正常に動作すること。
【解決手段】磁極数4極のロータマグネット10−1〜10−4と、4極のステータコアティース11−1〜11−4とを有する単相交流同期モータ1において、ロータマグネット10−1〜10−4の磁極ピッチをθ0度、ステータコアティース11−1〜11−4の開き角をθ1度、ロータマグネット10−1〜10−4の着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とする。
【選択図】図1
【解決手段】磁極数4極のロータマグネット10−1〜10−4と、4極のステータコアティース11−1〜11−4とを有する単相交流同期モータ1において、ロータマグネット10−1〜10−4の磁極ピッチをθ0度、ステータコアティース11−1〜11−4の開き角をθ1度、ロータマグネット10−1〜10−4の着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とする。
【選択図】図1
Description
本発明は、単相交流同期モータおよび単相直流ブラシレスモータに関する。
単相交流同期モータは、同期運転に入ると、たとえば単相交流電源の正弦波などの周波数に同期して駆動される。このとき、モータコイルに流れるモータ電流の位相とモータコイルに誘起される誘起電圧の位相とを比較すると、モータ電流の位相は、誘起電圧の位相に比べて、一般的に、軽負荷時には遅れ、高負荷時には進む傾向にある(たとえば特許文献1の段落「0032」、「0090」に、正弦波で駆動されるブラシレスDCモータについての同様な記載がある)。
このような同期運転中の単相交流同期モータでは、負荷の大小に応じてモータ電流の位相と誘起電圧の位相との関係が様々に変化する。
上述したように、単相交流同期モータのモータ電流の位相と誘起電圧の位相との関係は、同期運転中には負荷の大小に応じて様々に変化する。このときモータ電流の位相と誘起電圧の位相とにズレが生じると、そのズレ分が逆トルク発生電流として費やされ、その程度によっては、交流同期モータの安定同期駆動等に悪影響を及ぼす。したがって、低負荷から高負荷までの広い負荷領域において安定して同期駆動する性能の良い単相交流同期モータを設計するためには、逆トルクの発生を適切に調整することが不可欠である。
本発明は、このような背景の下に行われたものであって、低負荷から高負荷までの広い負荷領域において安定して同期駆動する単相交流同期モータおよび単相直流ブラシレスモータを提供することを目的とする。
本発明の1つの観点は、単相交流同期モータとしての観点である。すなわち、本発明の単相交流同期モータは、磁極数2n(nは自然数)のロータマグネットと、2n極のステータコアティースとを有する単相交流同期モータにおいて、ロータマグネットの磁極ピッチをθ0度、ステータコアティースの開き角をθ1度、ロータマグネットの着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とするものである。
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とするものである。
あるいは、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
としてもよい。
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
としてもよい。
あるいは、
9/9(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
としてもよい。
9/9(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
としてもよい。
本発明の他の観点は、単相直流ブラシレスモータとしての観点である。すなわち、本発明の単相直流ブラシレスモータは、磁極数2n(nは自然数)のロータマグネットと、2n極のステータコアティースとを有する単相直流ブラシレスモータにおいて、ロータマグネットの磁極ピッチをθ0度、ステータコアティースの開き角をθ1度、ロータマグネットの着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とするものである。
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とするものである。
あるいは、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
としてもよい。
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
としてもよい。
あるいは、
9/9(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
としてもよい。
9/9(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
としてもよい。
各発明によれば、低負荷から高負荷までの広い負荷領域において安定して同期駆動する単相交流同期モータおよび単相直流ブラシレスモータを提供することができる。
[本発明の実施の形態の単相交流同期モータ1の概要について]
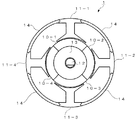
本発明の実施の形態の単相交流同期モータ1は、図1に示すように、磁極数2n(ここではn=2とする。)のロータマグネット10−1〜10−4と、2n極のステータコアティース11−1〜11−4とを有する。詳細は後述するが、ステータコアティース11−1〜11−4の開き角をθ1(以下では単に開き角θ1という)およびロータマグネット10−1〜10−4の着磁角をθ2(以下では単に着磁角θ2という)は、ロータマグネット10−1〜10−4の磁極ピッチをθ0(以下では単に磁極ピッチθ0という)、を基準とした所定の大きさになっている。以下の説明は、様々な開き角θ1および着磁角θ2を設定し、広い負荷範囲において単相交流同期モータ1が正常に動作する開き角θ1と着磁角θ2との組合せを適宜選択するものである。
本発明の実施の形態の単相交流同期モータ1は、図1に示すように、磁極数2n(ここではn=2とする。)のロータマグネット10−1〜10−4と、2n極のステータコアティース11−1〜11−4とを有する。詳細は後述するが、ステータコアティース11−1〜11−4の開き角をθ1(以下では単に開き角θ1という)およびロータマグネット10−1〜10−4の着磁角をθ2(以下では単に着磁角θ2という)は、ロータマグネット10−1〜10−4の磁極ピッチをθ0(以下では単に磁極ピッチθ0という)、を基準とした所定の大きさになっている。以下の説明は、様々な開き角θ1および着磁角θ2を設定し、広い負荷範囲において単相交流同期モータ1が正常に動作する開き角θ1と着磁角θ2との組合せを適宜選択するものである。
(本発明の第一の実施の形態の単相交流同期モータ1の構成について)
本発明の第一の実施の形態の単相交流同期モータ1の構成について図1および図2を参照して説明する。
本発明の第一の実施の形態の単相交流同期モータ1の構成について図1および図2を参照して説明する。
単相交流同期モータ1は、図1の例では、磁極数4極のロータマグネット10−1〜10−4と、4極のステータコアティース11−1〜11−4とを有する。ロータマグネット10−1〜10−4の内側には回転軸12が設けられる。回転軸12とロータマグネット10−1〜10−4との間には、回転軸12のロータヨーク13が設けられる。ステータコアティース11−1〜11−4には不図示のモータコイルが巻回されており、モータコイルに通電されると隣接するステータコアティース11−1〜11−4は互いに異なる極性に磁化する。また、ステータコアティース11−1〜11−4は、ステータヨーク14によって連結されている。
(単相交流同期モータ1を駆動する際の周辺の構成について)
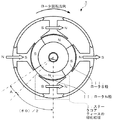
図2は、単相交流同期モータ1を駆動する駆動部の構成例を示す図である。この例の場合、駆動部は、図2に示すように、単相交流電源20、起動運転回路30、制御部31、運転切換回路40,41、および負荷50を有する。
図2は、単相交流同期モータ1を駆動する駆動部の構成例を示す図である。この例の場合、駆動部は、図2に示すように、単相交流電源20、起動運転回路30、制御部31、運転切換回路40,41、および負荷50を有する。
単相交流電源20は、たとえば100V/50Hz、100V/60Hz、110V/60Hz、および230V/50Hzなどの商用電源(正弦波)である。なお、単相交流同期モータ1に適用できる単相交流電源20の周波数としては、たとえば40Hz〜75Hzの範囲内のいずれでも適用可能である。
起動運転回路30は、単相交流同期モータ1を起動させるための回路である。単相交流同期モータ1は、最初から同期運転に入ることはできない。このため、単相交流同期モータ1の起動時には、たとえば1つの起動手段として、単相交流同期モータ1をDCブラシレスモータとして動作させるようにする。これによれば、起動運転回路30は、単相交流電源20の単相交流電圧を整流して直流電圧を生成するとともに、生成した直流電圧に基づいて内蔵するスイッチング素子等により疑似交流を生成し、ステータコアティース11−1〜11−4に巻回されたモータコイルに通電させる。これにより、ステータコアティース11−1〜11−4には回転磁界が発生し、ロータマグネット10−1〜10−4は回転を開始する。
制御部31は、起動運転回路30および運転切換回路40,41を制御する。たとえば、制御部31は、単相交流同期モータ1が起動運転時には、起動運転回路30に指示を与えて疑似交流をステータコアティース11−1〜11−4に巻回されたモータコイルに通電させる。そして、単相交流同期モータ1が同期運転に移行する際には、制御部31は、切換回路40,41を起動運転回路30から単相交流電源20に切り換えると共に起動運転回路30を停止させる。
切換回路40,41は、単相交流同期モータ1への通電を起動運転回路30から単相交流電源20に切換える回路である。図2の例では、切換回路40,41は、単相交流電源20側に切り換わっている。また、図2では、説明を分り易くするために切換回路40,41を有接点スイッチのように描いたが実際にはトライアックなどの無接点スイッチを用いることができる。
負荷50は、たとえば回転軸12に装着されたファンである。
[磁極ピッチθ0、開き角θ1、着磁角θ2の定義について]
図3は、磁極ピッチθ0および開き角θ1を示す図である。
図3は、磁極ピッチθ0および開き角θ1を示す図である。
磁極ピッチθ0は、360度を磁極数(n)で除算した値と等しい角度である。よって、4極のロータマグネット10−1〜10−4の場合は磁極ピッチθ0=(360/n)度=90度になる。
開き角θ1は、図3に示すように、ステータコアティース11−1〜11−4の、ロータマグネット10−1〜10−4に近接する円弧面の周方向の両端部と回転軸12の中心とを結ぶ線の成す角度である。
図4は、着磁角θ2を示す図である。着磁角θ2は、ロータマグネット10−1〜10−4の着磁状態を所定の観測点から観たときの磁束密度の分布(これを着磁形状という)を角度として表したものである。図4の横軸は、ロータマグネット10−1〜10−4の回転角度であり、図4の縦軸は、ロータマグネット10−1〜10−4の回転角度に対応する磁束密度である。
図4は、ロータマグネット10−1〜10−4が一周する分の着磁波形であり、図4における1つの山または谷が磁極ピッチθ0になる。また、図4に示すように、着磁形状の1つの山または谷を見ると台形形状になっており、このような着磁形状を台形波着磁と呼ぶ。このときに、ロータマグネット10−1〜10−4の着磁角θ2は、台形波の上辺の範囲の角度になる。なお、正弦波着磁は、磁極ピッチθ0=“90”とした場合、着磁角θ2=“60”の台形波着磁と等価に扱うことができる。
[逆トルクの発生と開き角θ1および着磁角θ2との関係について]
ここで、逆トルクの発生と開き角θ1および着磁角θ2との関係について図5〜図25を参照して説明する。
ここで、逆トルクの発生と開き角θ1および着磁角θ2との関係について図5〜図25を参照して説明する。
(逆トルク発生電流について)
図5に示すように、単相交流電圧、誘起電圧、モータ電流の各位相を比較してみると、単相交流同期モータ1の負荷の大小に応じて様々に変化していることがわかる。
図5に示すように、単相交流電圧、誘起電圧、モータ電流の各位相を比較してみると、単相交流同期モータ1の負荷の大小に応じて様々に変化していることがわかる。
すなわち、単相交流同期モータ1が無負荷であるときには、単相交流電圧の位相を基準にしてモータ電流の位相をみた場合、約70度程度遅れていることがわかる(図5では、+15度−85度=−70度)。一方、単相交流同期モータ1が定格負荷であるときには、単相交流電圧の位相を基準にしてモータ電流の位相をみた場合、約3度程度遅れていることがわかる(図5では、−6度+3度=−3度)。さらに、単相交流同期モータ1が高負荷であるときには、単相交流電圧の位相を基準にしてモータ電流の位相をみた場合、約3度程度進んでいることがわかる(図5では、−15度+18度=+3度)。すなわち、単相交流電圧の位相を基準にしてモータ電流の位相をみた場合、無負荷から高負荷へと負荷が大きくなるに連れて単相交流電圧の位相に対し、モータ電流の位相は進む傾向にある。一方で、単相交流電圧の位相を基準にして誘起電圧の位相をみた場合、無負荷から高負荷へと負荷が大きくなるに連れて単相交流電圧の位相に対し、誘起電圧流の位相は遅れる傾向にあることがわかる(図5では、無負荷時:+15度→定格負荷時:−6度→高負荷時:−15度)。
また、図5に黒塗りで示した部分は、逆トルク発生電流である。この逆トルク発生電流は、誘起電圧の極性とモータ電流の極性とが反対である部分の電流を指す。この逆トルク発生電流は、単相交流同期モータ1に逆トルクを発生させる。この逆トルクは、単相交流同期モータ1において、いわばブレーキの役割を果たしている。単相交流同期モータ1では、適切な出力トルクが得られるように、正トルクと逆トルクの割合が自律的に調整され、同期回転が維持される。
単相交流同期モータ1では、逆トルクは、無負荷時には大きく発生することによりロータ回転が過回転になることを抑制している。一方、単相交流同期モータ1では、逆トルクは、定格負荷時には殆ど発生せず高いトルクを発生できるようになる。他方、単相交流同期モータ1が高負荷になると、単相交流電圧の位相を基準としてみた場合、モータ電流の位相は、定格負荷時よりもさらに進むため、高いトルクが必要であるにも関わらず逆トルク発生電流が定格負荷時よりも大きくなり、脱調し易くなる。
このように、単相交流同期モータ1では、逆トルクの発生が負荷の状態に応じて適切に行われるようにモータ設計を行うことが性能の向上につながる。以下では、開き角θ1および着磁角θ2の値が逆トルクの発生に深く関与していることについて説明する。なお、以下の説明では、逆トルクエネルギーという概念を新しく導入する。逆トルクエネルギーは、単相交流同期モータ1を回転方向とは逆方向に回そうとする逆トルクの仕事量である。
(開き角θ1および着磁角θ2の値と逆トルクエネルギーの発生との関係について)
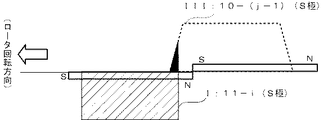
開き角θ1および着磁角θ2の値と逆トルクエネルギーの発生との関係を図6〜図25を参照しながら詳細に説明する。図6は、電流波形のゼロクロス点(電流方向の切換わり点)における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れ角Aだけ遅れている状態を示している。図7は、図6の状態を平面に展開して説明する図であり、θ1=(6/9)θ0、θ2=(6/9)θ0の場合を示す図である。また、図8は、図6の状態を平面に展開して説明する図であり、θ1=(7/9)θ0、θ2=(7/9)θ0の場合を示す図である。
開き角θ1および着磁角θ2の値と逆トルクエネルギーの発生との関係を図6〜図25を参照しながら詳細に説明する。図6は、電流波形のゼロクロス点(電流方向の切換わり点)における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れ角Aだけ遅れている状態を示している。図7は、図6の状態を平面に展開して説明する図であり、θ1=(6/9)θ0、θ2=(6/9)θ0の場合を示す図である。また、図8は、図6の状態を平面に展開して説明する図であり、θ1=(7/9)θ0、θ2=(7/9)θ0の場合を示す図である。
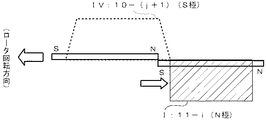
図7、図8においてハッチング部分は、図6におけるI:ステータコアティース11−i(iは1〜4のいずれか)の磁化領域である。図7、図8の2つのハッチング部分は、左下がステータコアティース11−iの磁化領域がS極に磁化されている期間であり、右上がステータコアティース11−iの磁化領域がN極に磁化されている期間である。また、図7、図8において破線の台形は、ロータマグネット10−j(jは1〜4のいずれか)の台形波着磁の形状を示す。図7、図8の2つの破線の台形は、左下がII:ロータマグネット10−jのN極(II:ロータN極と図示)であり、右上がIII:ロータマグネット10−(j−1)のS極(III:ロータS極と図示)である。
単相交流同期モータ1では、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れている状態において、I:ステータコアティース11−iの磁化領域のS極とII:ロータマグネット10−jのN極との間で発生する第1の逆トルクと、I:ステータコアティース11−iの磁化領域のS極とIII:ロータマグネット10−(j−1)のS極との間で発生する第2の逆トルクとがある。さらに、単相交流同期モータ1では、後述するように、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進んでいる状態において、I:ステータコアティース11−iの磁化領域のS極とII:ロータマグネット10−jのN極との間で発生する第3の逆トルクと、I:ステータコアティース11−iの磁化領域のN極とIV:ロータマグネット10−(j+1)のS極との間で発生する第4の逆トルクとがある。以下では、第1、第2、第3、第4の逆トルクについてそれぞれ分けて説明する。
(第1の逆トルクについて)
第1の逆トルクは、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れている状態において、I:ステータコアティース11−iの磁化領域のS極とII:ロータマグネット10−jのN極との間で発生する。以下では、第1の逆トルクの逆トルクエネルギーの発生について図6〜図11を参照しながら説明する。
第1の逆トルクは、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れている状態において、I:ステータコアティース11−iの磁化領域のS極とII:ロータマグネット10−jのN極との間で発生する。以下では、第1の逆トルクの逆トルクエネルギーの発生について図6〜図11を参照しながら説明する。
図9は、II:ロータマグネット10−jのN極の磁気中心とI:ステータコアティース11−iのS極の磁気中心とが一致した状態である。図7、図8では、一点鎖線で囲まれた部分の位置に相当する。回転しているII:ロータマグネット10−jのN極が図9の状態を過ぎた瞬間からI:ステータコアティース11−iのS極がII:ロータマグネット10−jのN極を回転方向に対して引き戻そうとする。このため、単相交流同期モータ1では、I:ステータコアティース11−iのS極とII:ロータマグネット10−jのN極との間で第1の逆トルクが発生する。また、I:ステータコアティース11−iのS極とII:ロータマグネット10−jのN極との間で発生する瞬間的な逆トルクエネルギーは図9に示す状態が最大である。図9、図10の黒塗部分がステータコアティース11−iの開き角θ1とロータマグネット10−jの着磁の台形とが重なる領域である。この黒塗部分の面積が図9、図10にそれぞれ図示した状態における瞬間的な逆トルクエネルギーと考えることができる。
図10は、II:ロータマグネット10−jのN極の磁気中心とI:ステータコアティース11−iのS極の磁気中心とがモータ電流位相の誘起電圧位相に対する遅れ角Aだけズレた状態である。この瞬間にI:ステータコアティース11−iがN極に切り換わり、I:ステータコアティース11−iのN極がII:ロータマグネット10−jのN極を回転方向に押し出すようになるため、第1の逆トルクは消滅する。すなわち、I:ステータコアティース11−iのS極とII:ロータマグネット10−jのN極との間の第1の逆トルクは、図9の状態から始まって図10の状態で終了する(図7、図8の“逆トルク発生幅”に相当する。)。
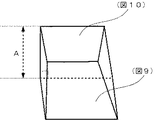
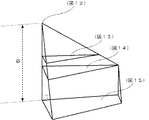
したがって、図11に示すように、瞬間的な逆トルクエネルギーを表す黒塗部分の面積を図9の状態から図10の状態までの遅れ角A(区間[0,A])上の定積分にて生成された立体の体積がI:ステータコアティース11−iのS極とII:ロータマグネット10−jのN極との間で発生する逆トルクエネルギーであると考えることができる。
以上の説明により、θ1、θ2が大きいほど図9、図10の黒塗部分の面積で与えられる各瞬間における逆トルクエネルギーも大きくなる。したがって、θ1、θ2が大きいほどこれを積分してなる第1の逆トルクの逆トルクエネルギーも大きくなることがわかる。このように、θ1、θ2の値が第1の逆トルクの逆トルクエネルギーに深く関与していることがわかる。
(第2の逆トルクについて)
第2の逆トルクは、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れている状態において、I:ステータコアティース11−iの磁化領域のS極とIII:ロータマグネット10−(j−1)のS極との間で発生する。第2の逆トルクの逆トルクエネルギーの発生について図6〜図8、図12〜図16を参照しながら説明する。なお、図12〜図16は、説明を分り易くするために、図7よりも逆トルクエネルギーが大きい図8に示すθ1=(7/9)θ0、θ2=(7/9)θ0の場合を例にとって説明している。
第2の逆トルクは、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して遅れている状態において、I:ステータコアティース11−iの磁化領域のS極とIII:ロータマグネット10−(j−1)のS極との間で発生する。第2の逆トルクの逆トルクエネルギーの発生について図6〜図8、図12〜図16を参照しながら説明する。なお、図12〜図16は、説明を分り易くするために、図7よりも逆トルクエネルギーが大きい図8に示すθ1=(7/9)θ0、θ2=(7/9)θ0の場合を例にとって説明している。
図7、図8において、I:ステータコアティース11−iの磁化領域のS極とIII:ロータマグネット10−(j−1)のS極とが図面の上下で交差する部分が、第2の逆トルクの発生領域になる。これは、I:ステータコアティース11−iの磁化領域のS極とIII:ロータマグネット10−(j−1)のS極とが互いに反発することにより、I:ステータコアティース11−iの磁化領域のS極がIII:ロータマグネット10−(j−1)のS極を回転方向に対して押し戻そうとするためである。
図12は、I:ステータコアティース11−iの磁化領域のS極(ハッチング部分)に、未だIII:ロータマグネット10−(j−1)のS極(台形部分)が入っていない状態である。すなわち、図7、図8では、I:ステータコアティース11−iの磁化領域のS極が一点鎖線で囲んだ領域以前にある状態である。図12に示す状態では、I:ステータコアティース11−iの磁化領域のS極とIII:ロータマグネット10−(j−1)のS極との間で第2の逆トルクが発生する要因は無い。
図13は、I:ステータコアティース11−iの磁化領域のS極にIII:ロータマグネット10−(j−1)のS極が入り始め、I:ステータコアティース11−iの磁化領域のS極がIII:ロータマグネット10−(j−1)のS極を押し戻す第2の逆トルクが発生し始めている。図13の状態では、未だ瞬間的な逆トルクエネルギー(黒塗部分の面積)は小さい。
図14は、I:ステータコアティース11−iの磁化領域のS極にIII:ロータマグネット10−(j−1)のS極がさらに深く入り込み、I:ステータコアティース11−iの磁化領域のS極がIII:ロータマグネット10−(j−1)のS極を押し戻すことにより瞬間的な逆トルクエネルギーが図13よりも大きくなる。
図15は、I:ステータコアティース11−iの磁化領域のS極にIII:ロータマグネット10−(j−1)のS極がさらに深く入り込み、I:ステータコアティース11−iの磁化領域のS極がIII:ロータマグネット10−(j−1)のS極を押し戻すことにより瞬間的な逆トルクエネルギー(黒塗部分の面積)が図14よりも大きくなっている。なお、図15は、図8で図示した状態に対応しており、図15の状態を過ぎた瞬間からI:ステータコアティース11−iの磁化領域がN極に切り換わり、III:ロータマグネット10−(j−1)のS極を引き付けるため、第2の逆トルクが終了する状態である。
図12〜図15に示した瞬間的な逆トルクエネルギーを表す黒塗部分の面積を、逆トルクの発生領域角B(区間[0,B])上の定積分にて生成した立体を図16に示す。図16の立体における頂点は図12に示す状態であり、未だ第2の逆トルクは発生していない。図12の状態から図13、図14、図15の状態へと進むにしたがって、瞬間的な逆トルクエネルギーは大きくなる。そして、図15の状態を過ぎた瞬間からI:ステータコアティース11−iの磁化領域がN極に切り換わり、III:ロータマグネット10−(j−1)のS極を引き付けるため、第2の逆トルクの発生要因は消滅する。
したがって、図16に示すように、瞬間的な逆トルクエネルギーを表す黒塗部分の面積を図12の状態から図15の状態までのB(区間[0,B])上の定積分にて生成した立体の体積がI:ステータコアティース11−iのS極とIII:ロータマグネット10−(j−1)のS極との間で発生する第2の逆トルクの逆トルクエネルギーであると考えることができる。
図7、図8において、逆トルクの発生領域角Bは、
B=A−(θ0−θ1)/2
である。図7、図8では、モータ電流位相の誘起電圧位相に対する遅れ角Aはほぼ同じであり、図8は、図7よりもθ1が大きくなっているため、逆トルクの発生領域角Bも大きくなっている。このようにI:ステータコアティース11−iの磁化領域S極とIII:ロータマグネット10−(j−1)のS極との間の逆トルクの発生領域角Bは、θ1が大きくなることにより増加して積分区間が増す。さらに、θ1,θ2が大きいほど瞬間的な逆トルクエネルギー(黒塗部分の面積)も大きくなるため、第2の逆トルクの逆トルクエネルギーは、θ1,θ2が大きくなることにより増加することがわかる。
B=A−(θ0−θ1)/2
である。図7、図8では、モータ電流位相の誘起電圧位相に対する遅れ角Aはほぼ同じであり、図8は、図7よりもθ1が大きくなっているため、逆トルクの発生領域角Bも大きくなっている。このようにI:ステータコアティース11−iの磁化領域S極とIII:ロータマグネット10−(j−1)のS極との間の逆トルクの発生領域角Bは、θ1が大きくなることにより増加して積分区間が増す。さらに、θ1,θ2が大きいほど瞬間的な逆トルクエネルギー(黒塗部分の面積)も大きくなるため、第2の逆トルクの逆トルクエネルギーは、θ1,θ2が大きくなることにより増加することがわかる。
以上説明したように、単相交流同期モータ1において、θ1、θ2の値が第1、第2の逆トルクの逆トルクエネルギーに深く関与していることがわかる。
(第3の逆トルクについて)
図17は、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進んでいる状態を示している。このように、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進み角Cだけ進んでいる状態は、単相交流同期モータ1が過負荷であり、乱調・脱調が近い場合に多く生じる。
図17は、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進んでいる状態を示している。このように、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進み角Cだけ進んでいる状態は、単相交流同期モータ1が過負荷であり、乱調・脱調が近い場合に多く生じる。
第3の逆トルクは、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進んでいる状態において、I:ステータコアティース11−iの磁化領域のN極とII:ロータマグネット10−jのN極との間で発生する。以下では、第3の逆トルクの逆トルクエネルギーの発生について図18〜図20を参照しながら説明する。
図18は、II:ロータマグネット10−jのN極の磁気中心とI:ステータコアティース11−iの磁化領域のN極の磁気中心とがモータ電流位相の誘起電圧位相に対する進み角Cだけズレた状態である。この瞬間にI:ステータコアティース11−iの磁化領域がS極からN極に切り換わり、I:ステータコアティース11−iの磁化領域のN極がII:ロータマグネット10−jのN極を回転方向とは逆方向に押し返すようになるため、第3の逆トルクが発生する。
図19は、II:ロータマグネット10−jのN極の磁気中心とI:ステータコアティース11−iの磁化領域のN極の磁気中心とが一致した状態である。図19に示す状態を過ぎるとステータコアティース11−iの磁化領域のN極がロータマグネット10−jのN極を回転方向に押し出すようになるため、第3の逆トルクは消滅する。また、I:ステータコアティース11−iの磁化領域のN極とII:ロータマグネット10−jのN極との間で発生する瞬間的な逆トルクエネルギーは図19に示す状態が最大である。
図18、図19の黒塗部分の面積が図18、図19にそれぞれ図示した状態における第3の逆トルクの瞬間的な逆トルクエネルギーと考えることができる。すなわち、I:ステータコアティース11−iの磁化領域のN極とII:ロータマグネット10−jのN極との間の第3の逆トルクは、図18の状態から始まって図19の状態で終了する。
したがって、図20に示すように、瞬間的な逆トルクエネルギーを表す黒塗部分の面積を図18の状態から図19の状態までの進み角C(区間[0,C])上の定積分にて生成された立体の体積がI:ステータコアティース11−iのN極とII:ロータマグネット10−jのN極との間で発生する逆トルクエネルギーであると考えることができる。
以上の説明により、θ1、θ2が大きいほど図18、図19の黒塗部分の面積で与えられる各瞬間における逆トルクエネルギーも大きくなる。したがって、θ1、θ2が大きいほどこれを積分してなる第3の逆トルクの逆トルクエネルギーも大きくなる。このように、θ1、θ2の値が第3の逆トルクの逆トルクエネルギーに深く関与していることがわかる。
(第4の逆トルクについて)
第4の逆トルクは、第3の逆トルクと同様に、図17に示す電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進み角Cだけ進んでいる状態において発生するものである。図21は、図17の状態を平面に展開して説明する図であり、θ1=(7/9)θ0、θ2=(7/9)θ0の場合を示す図である。
第4の逆トルクは、第3の逆トルクと同様に、図17に示す電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進み角Cだけ進んでいる状態において発生するものである。図21は、図17の状態を平面に展開して説明する図であり、θ1=(7/9)θ0、θ2=(7/9)θ0の場合を示す図である。
第4の逆トルクは、I:ステータコアティース11−iの磁化領域のN極とIV:ロータマグネット10−(j+1)のS極との間で発生する。図21において、I:ステータコアティース11−iの磁化領域のN極とIV:ロータマグネット10−(j+1)のS極とが図面の上下で交差する部分(黒塗部分)が、第4の逆トルクの発生領域角Dになる。これは、I:ステータコアティース11−iの磁化領域のN極とIV:ロータマグネット10−(j+1)のS極とが互いに引き合うことにより、I:ステータコアティース11−iの磁化領域のN極がIV:ロータマグネット10−(j+1)のS極を回転方向に対して逆方向に引き戻そうとするためである。
図22は、図21の状態と同じ状態を簡略化して示した図であり、I:ステータコアティース11−iの磁化領域N極にIV:ロータマグネット10−(j+1)のS極が入り、I:ステータコアティース11−iの磁化領域のN極がIV:ロータマグネット10−(j+1)のS極を引き戻そうとすることにより第4の逆トルクの瞬間的な逆トルクエネルギー(黒塗部分)が生じている。なお、図22の状態となる直前の状態は、I:ステータコアティース11−iの磁化領域はS極であるため、I:ステータコアティース11−iの磁化領域のS極は、IV:ロータマグネット10−(j+1)のS極を押し出しており第4の逆トルクは発生しない。
図23は、I:ステータコアティース11−iの磁化領域N極(ハッチング部分)が、IV:ロータマグネット10−(j+1)のS極(台形部分)から脱した状態である。図23に示す状態では、I:ステータコアティース11−iの磁化領域のN極とIV:ロータマグネット10−(j+1)のS極との間で第4の逆トルクが発生する要因は無い。すなわち、第4の逆トルクは、図22の状態で発生を開始し、図23の状態で発生を終了する。
図22、図23に示した瞬間的な逆トルクエネルギーを、逆トルクの発生領域角D(区間[0,D])上の定積分することによって生成した立体を図24に示す。図24の立体における底面は図22に示す状態であり、図22の状態から図23の状態へと進むにしたがって、瞬間的な逆トルクエネルギーは小さくなる。そして、図23の状態になるとI:ステータコアティース11−iの磁化領域がS極に切り換わり、IV:ロータマグネット10−(j+1)のS極と反発するため、第4の逆トルクは消滅する。
したがって、図24に示すように、図22の状態から図23の状態までのD(区間[0,D])上の定積分をすることによって生成した立体の体積がI:ステータコアティース11−iのN極とIV:ロータマグネット10−(j+1)のS極との間で発生する第4の逆トルクの逆トルクエネルギーであると考えることができる。
図21、図22において、逆トルクの発生領域角Dは、
D=C−(θ0−θ1)/2
である。このようにI:ステータコアティース11−iの磁化領域N極とIV:ロータマグネット10−(j+1)のS極との間の逆トルクの発生領域角Dは、θ1が大きくなることにより増加して、積分区間が増す。さらに、θ1、θ2が大きいほど瞬間的な逆トルクエネルギー(黒塗部分の面積)も大きくなるため、第4の逆トルクの逆トルクエネルギーもθ1、θ2が大きくなることにより増加する。このように、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進んでいる状態においても、θ1、θ2の値が第4の逆トルクの逆トルクエネルギーに深く関与していることがわかる。
D=C−(θ0−θ1)/2
である。このようにI:ステータコアティース11−iの磁化領域N極とIV:ロータマグネット10−(j+1)のS極との間の逆トルクの発生領域角Dは、θ1が大きくなることにより増加して、積分区間が増す。さらに、θ1、θ2が大きいほど瞬間的な逆トルクエネルギー(黒塗部分の面積)も大きくなるため、第4の逆トルクの逆トルクエネルギーもθ1、θ2が大きくなることにより増加する。このように、電流波形のゼロクロス点における単相交流同期モータ1のモータ電流の位相が誘起電圧の位相に対して進んでいる状態においても、θ1、θ2の値が第4の逆トルクの逆トルクエネルギーに深く関与していることがわかる。
なお、図25は、図17の状態を平面に展開して説明する図であり、θ1=(6/9)θ0、θ2=(6/9)θ0の場合を示す図である。図25の例では、θ1=(6/9)θ0、θ2=(6/9)θ0の場合には、逆トルクの発生領域角Dが存在せず、第4の逆トルクが発生しない。すなわち、θ1=(6/9)θ0、θ2=(6/9)θ0の場合は、I:ステータコアティース11−iの磁化領域がN極に切換わったときには、IV:ロータマグネット10−(j+1)のS極は、I:ステータコアティース11−iの磁化領域を脱している。このことからも、θ1、θ2の値が第4の逆トルクの逆トルクエネルギーに深く関与していることがわかる。
[極ピッチθ0に対する開き角θ1および着磁角θ2の考察について]
上述したように、θ0、θ1、θ2は、逆トルクの発生に関与し、その逆トルクは、その大きさによっては、単相交流同期モータ1の安定同期駆動に影響を与える。図26は、磁極ピッチθ0に対する開き角θ1および着磁角θ2の様々な組合せと、当該組合せに伴う安定同期駆動、コギングトルク、有効磁束の良否について無負荷から定格負荷までを駆動条件として実測した評価結果を示す図である。図26の例においては、60Hzの100Vの単相交流電圧を出力10Wの単相交流同期モータ1に印加し、この単相交流同期モータ1に無負荷(0[mN・m])から70[mN・m]までの負荷をかけて実測した評価結果である。
上述したように、θ0、θ1、θ2は、逆トルクの発生に関与し、その逆トルクは、その大きさによっては、単相交流同期モータ1の安定同期駆動に影響を与える。図26は、磁極ピッチθ0に対する開き角θ1および着磁角θ2の様々な組合せと、当該組合せに伴う安定同期駆動、コギングトルク、有効磁束の良否について無負荷から定格負荷までを駆動条件として実測した評価結果を示す図である。図26の例においては、60Hzの100Vの単相交流電圧を出力10Wの単相交流同期モータ1に印加し、この単相交流同期モータ1に無負荷(0[mN・m])から70[mN・m]までの負荷をかけて実測した評価結果である。
図26は、開き角θ1および着磁角θ2を、それぞれ、(4/9)θ0、(5/9)θ0、(6/9)θ0、(7/9)θ0とした場合の安定同期駆動、コギングトルク、有効磁束の良否について評価した結果である。θ0は、磁極ピッチである(図4)。図中の◎印は評価結果が最良であり、図中の〇印は評価結果が良好であり、図中の△印は評価結果が良好ではないが許容範囲内であり、図中の×印は評価結果が許容範囲外である。
(開き角θ1と着磁角θ2の最良◎の組合せ)
図26に示す評価結果では、単相交流同期モータ1の「安定同期駆動」については、開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0、開き角θ1が(5/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0、開き角θ1が(6/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、および(6/9)θ0であるときに、それぞれ最良(◎印:無負荷から定格負荷までの広い負荷範囲において安定的に同期駆動できる。)である。
図26に示す評価結果では、単相交流同期モータ1の「安定同期駆動」については、開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0、開き角θ1が(5/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0、開き角θ1が(6/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、および(6/9)θ0であるときに、それぞれ最良(◎印:無負荷から定格負荷までの広い負荷範囲において安定的に同期駆動できる。)である。
また、単相交流同期モータ1の「有効磁束」については、開き角θ1が(6/9)θ0であり、着磁角θ2が(6/9)θ0および(7/9)θ0、開き角θ1が(7/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0であるときに、それぞれ最良(◎印:高効率、高出力が得られる。)である。
(開き角θ1と着磁角θ2の良好〇の組合せ)
図26に示す評価結果では、単相交流同期モータ1の安定同期駆動については、開き角θ1が(6/9)θ0であり、着磁角θ2が(7/9)θ0、開き角θ1が(7/9)θ0であり、着磁角θ2が(4/9)θ0および(5/9)θ0であるときにそれぞれ良好(〇印:無負荷から定格負荷までの広い負荷範囲において実用上問題無く同期駆動できる。)である。
図26に示す評価結果では、単相交流同期モータ1の安定同期駆動については、開き角θ1が(6/9)θ0であり、着磁角θ2が(7/9)θ0、開き角θ1が(7/9)θ0であり、着磁角θ2が(4/9)θ0および(5/9)θ0であるときにそれぞれ良好(〇印:無負荷から定格負荷までの広い負荷範囲において実用上問題無く同期駆動できる。)である。
また、単相交流同期モータ1のコギングトルクについては、開き角θ1が(7/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0であるときに良好(〇印:実用上問題無くコギングトルクが小さい。)である。
また、単相交流同期モータ1の「有効磁束」については、開き角θ1が(5/9)θ0であり、着磁角θ2が(6/9)θ0および(7/9)θ0、開き角θ1が(6/9)θ0であり、着磁角θ2が(4/9)θ0および(5/9)θ0であるときに良好(〇印:実用上問題の無い効率、出力が得られる。)である。
(開き角θ1と着磁角θ2の良好ではないが許容範囲内△の組合せ)
図26に示す評価結果では、単相交流同期モータ1の安定同期駆動については、開き角θ1が(7/9)θ0であり、着磁角θ2が(6/9)θ0であるときに良好ではないが許容範囲内(△印:無負荷から定格負荷までの広い負荷範囲において良好とは言えないが同期駆動できる。)である。
図26に示す評価結果では、単相交流同期モータ1の安定同期駆動については、開き角θ1が(7/9)θ0であり、着磁角θ2が(6/9)θ0であるときに良好ではないが許容範囲内(△印:無負荷から定格負荷までの広い負荷範囲において良好とは言えないが同期駆動できる。)である。
また、単相交流同期モータ1のコギングトルクについては、開き角θ1が(5/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ、および(7/9)θ、開き角θ1が(6/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0であるときにそれぞれ良好ではないが許容範囲内(△印:良好とは言えないが許容範囲内のコギングトルクが発生する。)である。
また、単相交流同期モータ1の有効磁束については、開き角θ1が(4/9)θ0であり、着磁角θ2が(6/9)θ0および(7/9)θ0、開き角θ1が(5/9)θ0であり、着磁角θ2が(4/9)θ0および(5/9)θ0であるときにそれぞれ良好ではないが許容範囲内(△印:出力を得るためには、一定の効率悪化が避けられない。)である。
(開き角θ1と着磁角θ2の許容範囲外×の組合せ)
図26に示す評価結果では、単相交流同期モータ1の安定同期駆動については、開き角θ1が(7/9)θ0であり、着磁角θ2が(7/9)θ0であるときに許容範囲外(×印:同期駆動してもすぐに乱調・脱調を来す。)である。
図26に示す評価結果では、単相交流同期モータ1の安定同期駆動については、開き角θ1が(7/9)θ0であり、着磁角θ2が(7/9)θ0であるときに許容範囲外(×印:同期駆動してもすぐに乱調・脱調を来す。)である。
また、単相交流同期モータ1のコギングトルクについては、開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0、(5/9)θ0、(6/9)θ0、および(7/9)θ0であるときに許容範囲外(×印:コギングトルクが許容範囲外に大きい。)である。
また、単相交流同期モータ1の有効磁束については、開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0および(5/9)θ0であるときに許容範囲外(×印:出力を得るためには、効率の悪化は避けられない。)である。
(総合評価について)
単相交流同期モータ1の性能としては、無負荷から定格負荷まで安定同期駆動が可能なことが最優先されるべきである。したがって、「安定同期駆動」の項目が最良(◎印)または良好(〇印)で、たとえば有効磁束が許容範囲外(×印)となっていない、となる条件を、適切に同期駆動させるための条件とすることができる。
単相交流同期モータ1の性能としては、無負荷から定格負荷まで安定同期駆動が可能なことが最優先されるべきである。したがって、「安定同期駆動」の項目が最良(◎印)または良好(〇印)で、たとえば有効磁束が許容範囲外(×印)となっていない、となる条件を、適切に同期駆動させるための条件とすることができる。
図26の評価結果から上記の条件が除外される組合せをハッチングしたものを図27に示す。なお、開き角θ1が(4/9)θ0であり、着磁角θ2が(6/9)θ0および(7/9)θ0である組合せは、安定同期駆動が優良◎であるがコギングトルクが許容範囲外(×印)であり、有効磁束が良好ではないが許容範囲内(△印)である。この2つの組合せは、双方共にコギングトルクが許容範囲外(×印)になっている。しかしながら、コギングトルクについては、後述する第二の実施の形態において補助ティースの適用によって改善可能であるため、除外の対象とはしないことにする。
これによれば、
θ1=α1・θ0
θ2=α2・θ0
としたときに、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とすることがよいことがわかる。
θ1=α1・θ0
θ2=α2・θ0
としたときに、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とすることがよいことがわかる。
ただし、この場合、除外すべき組合せについてもこの中に含まれることになる。そこで、以下では、「係数の積」、「係数の和および差」によってα1,α2のとり得る範囲を限定する例を示す。
(係数の積について)
磁極ピッチθ0の係数の積を、開き角θ1および着磁角θ2についてそれぞれ計算した結果を図28に示す。開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の積は16/81になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の積は20/81になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の積は24/81になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の積は28/81になる。
磁極ピッチθ0の係数の積を、開き角θ1および着磁角θ2についてそれぞれ計算した結果を図28に示す。開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の積は16/81になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の積は20/81になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の積は24/81になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の積は28/81になる。
開き角θ1が(5/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の積は20/81になる。また、開き角θ1が(5/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の積は25/81になる。また、開き角θ1が(5/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の積は30/81になる。また、開き角θ1が(5/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の積は35/81になる。
開き角θ1が(6/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の積は24/81になる。また、また、開き角θ1が(6/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の積は30/81になる。また、開き角θ1が(6/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の積は36/81になる。また、開き角θ1が(6/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の積は42/81になる。
開き角θ1が(7/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の積は28/81になる。また、開き角θ1が(7/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の積は35/81になる。また、開き角θ1が(7/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の積は42/81になる。また、開き角θ1が(7/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の積は49/81になる。
図28でハッチング箇所を除いた組合せが採用すべき組合せであるので、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
とすることがよいことがわかる。
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
とすることがよいことがわかる。
(係数の和について)
磁極ピッチθ0の係数の和を、開き角θ1および着磁角θ2についてそれぞれ計算した結果を図29に示す。開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の和は8/9になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の和は9/9(=1)になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の和は10/9になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の和は11/9になる。
磁極ピッチθ0の係数の和を、開き角θ1および着磁角θ2についてそれぞれ計算した結果を図29に示す。開き角θ1が(4/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の和は8/9になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の和は9/9(=1)になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の和は10/9になる。また、開き角θ1が(4/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の和は11/9になる。
開き角θ1が(5/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の和は9/9(=1)になる。また、開き角θ1が(5/9)であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の和は10/9になる。また、開き角θ1が(5/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の和は11/9になる。また、開き角θ1が(5/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の和は12/9になる。
開き角θ1が(6/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の和は10/9になる。また、開き角θ1が(6/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の和は11/9になる。また、開き角θ1が(6/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の和は12/9になる。また、開き角θ1が(6/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の和は13/9になる。
開き角θ1が(7/9)θ0であり、着磁角θ2が(4/9)θ0である組合せにおいて、その係数の和は11/9になる。また、開き角θ1が(7/9)θ0であり、着磁角θ2が(5/9)θ0である組合せにおいて、その係数の和は12/9になる。また、開き角θ1が(7/9)θ0であり、着磁角θ2が(6/9)θ0である組合せにおいて、その係数の和は13/9になる。また、開き角θ1が(7/9)θ0であり、着磁角θ2が(7/9)θ0である組合せにおいて、その係数の和は14/9になる。
図29でハッチング箇所を除いた組合せが採用すべき組合せであるので、
1(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
とすることがよいことがわかる。
1(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
とすることがよいことがわかる。
(単相交流同期モータ1の安定同期駆動負荷領域について)
次に、単相交流同期モータ1の安定同期駆動負荷領域について実測した結果を図30に示す。図30は、60Hz10W仕様の単相交流同期モータ1を使用し、着磁角θ2=60(すなわち(6/9)θ0)にて、60Hz100Vの単相交流電圧を印加して実測した結果である。
次に、単相交流同期モータ1の安定同期駆動負荷領域について実測した結果を図30に示す。図30は、60Hz10W仕様の単相交流同期モータ1を使用し、着磁角θ2=60(すなわち(6/9)θ0)にて、60Hz100Vの単相交流電圧を印加して実測した結果である。
図30に示すように、θ1=40(すなわち(4/9)θ0)であるときには安定同期駆動負荷領域は、無負荷から58.4[mN・m]までであり、このときの出力は11.0Wである。また、θ1=50(すなわち(5/9)θ0)であるときには安定同期駆動負荷領域は、無負荷から82.3[mN・m]までであり、このときの出力は15.5Wである。また、θ1=60(すなわち(6/9)θ0)であるときには安定同期駆動負荷領域は、無負荷から79.6[mN・m]までであり、このときの出力は15.0Wである。また、θ1=70(すなわち(7/9)θ0)であるときには安定同期駆動負荷領域は、下限は12.2[mN・m]からであり、このときの出力は2.3Wであり、上限は33.4[mN・m]までであり、このときの出力は6.3Wである。また、θ1=80,89(すなわち(8/9)θ0,≒θ0)のときには安定同期駆動可能な負荷領域が存在しない。図30の実測結果を視覚的に示したものを図31に示す。
図30、図31の実測結果から無負荷から80.0[mN・m]前後までの負荷に対し、θ1=50または60が好ましいことがわかる。また、負荷が比較的小さい(たとえば60.0[mN・m]前後)場合には、θ1=40であってもよいことがわかる。
(効果)
以上説明したように、
開き角θ1=α1・磁極ピッチθ0
着磁角θ2=α2・磁極ピッチθ0
とするときに、
4/9≦α1≦7/9
4/9≦α2≦7/9
特に、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
あるいは、
1(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
とすることにより、単相交流同期モータ1は、無負荷から定格負荷近傍までの広い負荷領域で安定して同期駆動を行うことができる。たとえば負荷50がファンである場合、ファンの羽に異物が衝突したり、ファンに対して外部から風が当たるなどの様々な要因によって負荷量が変動する可能性が特に高い。このように負荷50がファンである場合、単相交流同期モータ1は、負荷量が変動しても正常回転を維持することが特に重要である。
以上説明したように、
開き角θ1=α1・磁極ピッチθ0
着磁角θ2=α2・磁極ピッチθ0
とするときに、
4/9≦α1≦7/9
4/9≦α2≦7/9
特に、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
あるいは、
1(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
とすることにより、単相交流同期モータ1は、無負荷から定格負荷近傍までの広い負荷領域で安定して同期駆動を行うことができる。たとえば負荷50がファンである場合、ファンの羽に異物が衝突したり、ファンに対して外部から風が当たるなどの様々な要因によって負荷量が変動する可能性が特に高い。このように負荷50がファンである場合、単相交流同期モータ1は、負荷量が変動しても正常回転を維持することが特に重要である。
[本発明の第二の実施の形態の単相交流同期モータ1Aについて]
本発明の第二の実施の形態の単相交流同期モータ1Aについて図32および図33を参照して説明する。図32は、単相交流同期モータ1Aの構成を示す図である。単相交流同期モータ1Aは、単相交流同期モータ1とは一部が異なる。以下では、単相交流同期モータ1と同一または同種の部材については同一または同一系の符号を付してその説明を省略または簡略し、主として異なる部材について説明する。
本発明の第二の実施の形態の単相交流同期モータ1Aについて図32および図33を参照して説明する。図32は、単相交流同期モータ1Aの構成を示す図である。単相交流同期モータ1Aは、単相交流同期モータ1とは一部が異なる。以下では、単相交流同期モータ1と同一または同種の部材については同一または同一系の符号を付してその説明を省略または簡略し、主として異なる部材について説明する。
単相交流同期モータ1Aは、図32に示すように、ステータコアティース11−1〜11−4の間に補助ティース60−1〜60−4を配置する。補助ティース60−1〜60−4の幅をステータコアティース11−1〜11−4の開き角と同様の方法で表すと、たとえば
[(1−6/9)θ0]*1/10
以上であり、ステータコアティース11−1〜11−4と接触しない幅(開き角)とする。補助ティース60−1〜60−4は、ステータヨーク14Aと一体に形成されてもよいし、ステータヨーク14Aに接合されてもよい。
[(1−6/9)θ0]*1/10
以上であり、ステータコアティース11−1〜11−4と接触しない幅(開き角)とする。補助ティース60−1〜60−4は、ステータヨーク14Aと一体に形成されてもよいし、ステータヨーク14Aに接合されてもよい。
図33は、60Hz100Vの単相交流電圧を出力10Wの補助ティース60−1〜60−4を有しない単相交流同期モータ1および補助ティース60−1〜60−4を有する単相交流同期モータ1Aに通電してコギングトルクを実測した結果である。なお、開き角θ1および着磁角θ2を共に60(すなわち(6/9)θ0)とした。
補助ティース60−1〜60−4を有しない単相交流同期モータ1では、コギングトルクは110[mN・m]であった。また、このときの誘起電圧の実効値は、84.6Vであった。これに対し、補助ティース60−1〜60−4を有する単相交流同期モータ1Aでは、コギングトルクは28.6[mN・m]であった。また、このときの誘起電圧の実効値は、84.9Vであった。
(効果)
このように、補助ティース60−1〜60−4を有しない単相交流同期モータ1では、θ1=60(すなわち(6/9)θ0)のときに、コギングトルクは110[mN・m]であったのに対し、補助ティース60−1〜60−4を有する単相交流同期モータ1Aでは、θ1=60(すなわち(6/9)θ0)のときに、コギングトルクは28.6[mN・m]まで低減された。これは補助ティース60−1〜60−4を有しない単相交流同期モータ1に比べて補助ティース60−1〜60−4を有する単相交流同期モータ1Aのコギングトルクは、0.26倍(約1/4)に低減していることがわかる。
このように、補助ティース60−1〜60−4を有しない単相交流同期モータ1では、θ1=60(すなわち(6/9)θ0)のときに、コギングトルクは110[mN・m]であったのに対し、補助ティース60−1〜60−4を有する単相交流同期モータ1Aでは、θ1=60(すなわち(6/9)θ0)のときに、コギングトルクは28.6[mN・m]まで低減された。これは補助ティース60−1〜60−4を有しない単相交流同期モータ1に比べて補助ティース60−1〜60−4を有する単相交流同期モータ1Aのコギングトルクは、0.26倍(約1/4)に低減していることがわかる。
このように補助ティース60−1〜60−4を有する単相交流同期モータ1Aによってコギングトルクを低減することができるので、図27で説明したθ1=(4/9)θ0とθ2=(6/9)θ0の組合せ、またはθ1=(4/9)θ0とθ2=(7/9)θ0の組合せにおいて、コギングトルクに対する評価結果が許容範囲外(×印)であってもこれを評価結果が良好ではないが許容範囲内(△印)もしくは良好(〇印)までに改善させることができることがわかる。
[その他の実施の形態]
本発明の実施の形態は、その要旨を逸脱しない限り様々に変更が可能である。上述した単相交流同期モータ1を、ロータマグネット10−1〜10−4の磁極位置を検出するセンサからの検出出力に応じてステータコアティース11−1〜11−4の磁化を適宜制御する単相直流ブラシレスモータに置き換え、上述した単相交流同期モータ1と同様の負荷および回転速度の条件で駆動させることにより、単相直流ブラシレスモータについても上述した実施の形態の説明と同様に説明することができる。
本発明の実施の形態は、その要旨を逸脱しない限り様々に変更が可能である。上述した単相交流同期モータ1を、ロータマグネット10−1〜10−4の磁極位置を検出するセンサからの検出出力に応じてステータコアティース11−1〜11−4の磁化を適宜制御する単相直流ブラシレスモータに置き換え、上述した単相交流同期モータ1と同様の負荷および回転速度の条件で駆動させることにより、単相直流ブラシレスモータについても上述した実施の形態の説明と同様に説明することができる。
1,1A…単相交流同期モータ、10−1〜10−4…ロータマグネット、11−1〜11−4…ステータコアティース
Claims (6)
- 磁極数2n(nは自然数)のロータマグネットと、2n極のステータコアティースとを有する単相交流同期モータにおいて、
上記ロータマグネットの磁極ピッチをθ0度、上記ステータコアティースの開き角をθ1度、上記ロータマグネットの着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、上記α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とする、
ことを特徴とする単相交流同期モータ。 - 請求項1記載の単相交流同期モータであって、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
とする、
ことを特徴とする単相交流同期モータ。 - 請求項1または2記載の単相交流同期モータであって、
1(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
とする、
ことを特徴とする単相交流同期モータ。 - 磁極数2n(nは自然数)のロータマグネットと、2n極のステータコアティースとを有する単相直流ブラシレスモータにおいて、
上記ロータマグネットの磁極ピッチをθ0度、上記ステータコアティースの開き角をθ1度、上記ロータマグネットの着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、上記α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とする、
ことを特徴とする単相直流ブラシレスモータ。 - 請求項4記載の単相直流ブラシレスモータであって、
20/81(ただし、θ1>(5/9)θ0)≦α1×α2≦42/81(ただし、θ2>(6/9)θ0)
とする、
ことを特徴とする単相直流ブラシレスモータ。 - 請求項4または5記載の単相直流ブラシレスモータであって、
1(ただし、θ1>(5/9)θ0)≦α1+α2≦13/9(ただし、θ1<(7/9)θ0)
とする、
ことを特徴とする単相直流ブラシレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010153234A JP2012016244A (ja) | 2010-07-05 | 2010-07-05 | 単相交流同期モータおよび単相直流ブラシレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010153234A JP2012016244A (ja) | 2010-07-05 | 2010-07-05 | 単相交流同期モータおよび単相直流ブラシレスモータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012016244A true JP2012016244A (ja) | 2012-01-19 |
Family
ID=45601999
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010153234A Pending JP2012016244A (ja) | 2010-07-05 | 2010-07-05 | 単相交流同期モータおよび単相直流ブラシレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012016244A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014125599A1 (ja) * | 2013-02-14 | 2014-08-21 | 三菱電機株式会社 | 永久磁石埋込型電動機、圧縮機及び冷凍空調装置 |
| CN106849424A (zh) * | 2015-12-03 | 2017-06-13 | 德昌电机(深圳)有限公司 | 单相永磁电机 |
| CN106921272A (zh) * | 2015-12-25 | 2017-07-04 | 德昌电机(深圳)有限公司 | 单相永磁电机 |
| CN112821701A (zh) * | 2019-11-18 | 2021-05-18 | 珠海格力电器股份有限公司 | 一种单相电机 |
-
2010
- 2010-07-05 JP JP2010153234A patent/JP2012016244A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014125599A1 (ja) * | 2013-02-14 | 2014-08-21 | 三菱電機株式会社 | 永久磁石埋込型電動機、圧縮機及び冷凍空調装置 |
| CN105075079A (zh) * | 2013-02-14 | 2015-11-18 | 三菱电机株式会社 | 永磁铁埋入式电动机、压缩机和冷冻空调装置 |
| JP6022031B2 (ja) * | 2013-02-14 | 2016-11-09 | 三菱電機株式会社 | 永久磁石埋込型電動機、圧縮機及び冷凍空調装置 |
| US9647501B2 (en) | 2013-02-14 | 2017-05-09 | Mitsubishi Electric Corporation | Interior permanent magnet motor, compressor and refrigeration and air conditioning apparatus |
| CN106849424A (zh) * | 2015-12-03 | 2017-06-13 | 德昌电机(深圳)有限公司 | 单相永磁电机 |
| CN106849424B (zh) * | 2015-12-03 | 2020-01-07 | 德昌电机(深圳)有限公司 | 单相永磁电机 |
| CN106921272A (zh) * | 2015-12-25 | 2017-07-04 | 德昌电机(深圳)有限公司 | 单相永磁电机 |
| CN112821701A (zh) * | 2019-11-18 | 2021-05-18 | 珠海格力电器股份有限公司 | 一种单相电机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Fazil et al. | A novel air-gap profile of single-phase permanent-magnet brushless DC motor for starting torque improvement and cogging torque reduction | |
| US9537380B2 (en) | Permanent-magnet type rotating electrical machine | |
| TWI501511B (zh) | 發電機及風力發電系統 | |
| JP4880804B2 (ja) | 同期電動機駆動システム | |
| JP5542849B2 (ja) | スイッチドリラクタンスモータ | |
| JP2011176993A (ja) | モータ制御装置 | |
| JP2010226935A (ja) | 永久磁石型回転電機 | |
| US20250343448A1 (en) | Motor | |
| US9000648B2 (en) | Asymmetrical reluctance machine | |
| JP2012016244A (ja) | 単相交流同期モータおよび単相直流ブラシレスモータ | |
| JP5419991B2 (ja) | 永久磁石式同期モータ | |
| JP5751147B2 (ja) | モータ装置 | |
| JP2014007853A (ja) | 電動機 | |
| JP5885423B2 (ja) | 永久磁石式回転電機 | |
| JP5734135B2 (ja) | 電気機械およびその製造方法 | |
| JP2009171799A (ja) | 永久磁石式同期モータ | |
| JP5171767B2 (ja) | 同期電動機の回転子及び同期電動機 | |
| KR101666931B1 (ko) | 가변 자속 자기 회로 | |
| JP6083307B2 (ja) | 回転機 | |
| Yang et al. | A magnetic-differential double-rotor flux-reversal permanent-magnet motor for electric vehicles | |
| JP5619522B2 (ja) | 3相交流回転機 | |
| JP2006352961A (ja) | Pmモータ | |
| Pankaj et al. | Analysis of back-EMF wave shaping on performance of PM brushless motor | |
| CN101902087A (zh) | 永磁型旋转机 | |
| JPH11332193A (ja) | 2相dcブラシレスモータ |