JP2011132961A - 風力タービンの非常用システムをトリガするためのシステムおよび方法、ならびに、風力タービン、コンピュータプログラムおよびコンピュータ読み取り可能な記録媒体 - Google Patents
風力タービンの非常用システムをトリガするためのシステムおよび方法、ならびに、風力タービン、コンピュータプログラムおよびコンピュータ読み取り可能な記録媒体 Download PDFInfo
- Publication number
- JP2011132961A JP2011132961A JP2010286070A JP2010286070A JP2011132961A JP 2011132961 A JP2011132961 A JP 2011132961A JP 2010286070 A JP2010286070 A JP 2010286070A JP 2010286070 A JP2010286070 A JP 2010286070A JP 2011132961 A JP2011132961 A JP 2011132961A
- Authority
- JP
- Japan
- Prior art keywords
- wind turbine
- rotor
- sensor
- value
- triggering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 16
- 238000004590 computer program Methods 0.000 title claims description 13
- 230000001133 acceleration Effects 0.000 claims abstract description 22
- 238000011156 evaluation Methods 0.000 claims description 24
- 230000001939 inductive effect Effects 0.000 claims description 6
- 230000005484 gravity Effects 0.000 claims description 4
- 238000001514 detection method Methods 0.000 claims description 3
- 230000002349 favourable effect Effects 0.000 abstract 1
- 238000012544 monitoring process Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
- F03D7/042—Automatic control; Regulation by means of an electrical or electronic controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0264—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for stopping; controlling in emergency situations
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/80—Diagnostics
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/82—Forecasts
- F05B2260/821—Parameter estimation or prediction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/101—Purpose of the control system to control rotational speed (n)
- F05B2270/1011—Purpose of the control system to control rotational speed (n) to prevent overspeed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/1016—Purpose of the control system in variable speed operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/107—Purpose of the control system to cope with emergencies
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/327—Rotor or generator speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/80—Devices generating input signals, e.g. transducers, sensors, cameras or strain gauges
- F05B2270/807—Accelerometers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Wind Motors (AREA)
Abstract
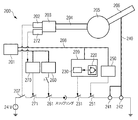
【解決手段】風力タービンの非常用システム140をトリガするためのシステム100は、風力タービンのロータの一部の加速度値を検出するセンサ110と、センサ110に接続されており、センサ110から加速度値を受信し、加速度値に基づいて風力タービンのロータのロータ回転速度値を求める評価ユニット120と、評価ユニット120に接続されており、ロータ回転速度値を受信し、ロータ回転速度値が所定の限界値を超えた場合に、非常用システム140をトリガするトリガユニット130と、を備えている。
【選択図】図1
Description
Claims (11)
- 風力タービンの非常用システムをトリガするためのシステムであって、
風力タービンのロータの一部の加速度値を検出するセンサと、
前記センサに接続されており、前記センサから加速度値を受信し、該加速度値に基づいて前記風力タービンのロータのロータ回転速度値を求める評価ユニットと、
前記評価ユニットに接続されており、前記ロータ回転速度値を受信し、前記ロータ回転速度値が所定の限界値を超えた場合に、前記非常用システムをトリガするトリガユニットと、
を備えていることを特徴とするシステム。 - 前記センサは加速度計である、請求項1記載のシステム。
- 前記センサはロータにおける重力の方向を検出する、請求項1または2記載のシステム。
- 前記評価ユニットは、前記風力タービンの制御ユニットに設けられている、請求項1乃至3のいずれか1項記載のシステム。
- 前記ロータの、前記ロータ回転速度値よりも高速の高速回転速度値を検出する高速回転速度センサと、
前記高速回転速度センサからの高速回転速度値と、前記ロータ回転速度値とを受信し、さらに、前記高速回転速度値と前記ロータ回転速度値との比較に基づいて比較値を得る比較ユニットと、
前記比較値が所定の限界値を超える場合に、前記比較ユニットの結果に基づいて速度センサの障害を検出する検出ユニットと、
をさらに備えている、請求項1乃至4のいずれか1項記載のシステム。 - 検出された超過速度が所定の限界値を超える場合に、前記非常用システムをトリガする超過速度コントローラを備えている、請求項1乃至5のいずれか1項記載のシステム。
- 前記超過速度コントローラは、超過速度を検出する誘導型センサを備えている、請求項6記載のシステム。
- 非常用システムと、
請求項1乃至7のいずれか1項記載の非常用システムをトリガするシステムと、
を備えていることを特徴とする風力タービン。 - 風力タービンの非常用システムをトリガするための方法であって、
風力タービンのロータの一部の加速度値をセンサにより検出するステップと、
前記センサに接続されている評価ユニットを介して、前記センサから前記加速度値を受信するステップと、
前記加速度値に基づいて、前記風力タービンのロータのロータ回転速度値を求めるステップと、
前記評価ユニットに接続されているトリガユニットが、前記評価ユニットからロータ回転速度値を受信するステップと、
前記ロータ回転速度値が所定の限界値を超える場合に、前記非常用システムをトリガするステップと、
を備える方法。 - 風力タービンの非常用システムをトリガするためのコンピュータプログラムであって、データプロセッサにより実行されるとき、請求項9記載の方法を制御するよう構成されている、コンピュータプログラム。
- プロセッサにより実行されるとき、請求項9記載の方法を実行または制御するよう構成されている、風力タービンの非常用システムをトリガするためのコンピュータプログラムが保存されたコンピュータ読み取り可能な記録媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09015864.3 | 2009-12-22 | ||
| EP09015864A EP2339174A1 (en) | 2009-12-22 | 2009-12-22 | System for triggering an emergency system of wind turbine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011132961A true JP2011132961A (ja) | 2011-07-07 |
| JP2011132961A5 JP2011132961A5 (ja) | 2014-01-09 |
Family
ID=42260319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010286070A Pending JP2011132961A (ja) | 2009-12-22 | 2010-12-22 | 風力タービンの非常用システムをトリガするためのシステムおよび方法、ならびに、風力タービン、コンピュータプログラムおよびコンピュータ読み取り可能な記録媒体 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8600570B2 (ja) |
| EP (1) | EP2339174A1 (ja) |
| JP (1) | JP2011132961A (ja) |
| CN (1) | CN102102624A (ja) |
| CA (1) | CA2725964A1 (ja) |
| NZ (1) | NZ590012A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101466080B1 (ko) | 2013-05-03 | 2014-11-27 | 삼성중공업 주식회사 | 풍력 터빈 제어 장치 및 방법 |
| JP2016094934A (ja) * | 2014-11-06 | 2016-05-26 | 株式会社東芝 | 気流発生装置、および、風力発電システム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2365215B1 (en) * | 2010-03-10 | 2012-12-12 | Siemens Aktiengesellschaft | Rotational speed control of a wind turbine based on rotor acceleration |
| US20130259686A1 (en) * | 2012-03-30 | 2013-10-03 | General Electric Company | System and method for controlling a wind turbine |
| DK3128170T3 (en) | 2015-08-06 | 2018-06-14 | Nordex Energy Gmbh | Wind energy system with an azimuth drive |
| CN111502913B (zh) * | 2019-01-30 | 2022-04-19 | 北京金风科创风电设备有限公司 | 风力发电机组、变桨控制方法以及装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003522950A (ja) * | 2000-02-08 | 2003-07-29 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 誘導センサ、特に回転数感知器 |
| JP2005220753A (ja) * | 2004-02-03 | 2005-08-18 | Fuji Heavy Ind Ltd | 水平軸風車及びその制御方法 |
| JP2006336513A (ja) * | 2005-05-31 | 2006-12-14 | Tokyo Electric Power Co Inc:The | ブレード構造、風力発電装置および風力発電装置の制御プログラム |
| JP2007023811A (ja) * | 2005-07-13 | 2007-02-01 | Shinko Electric Co Ltd | 風力発電設備 |
| WO2007099936A1 (ja) * | 2006-02-28 | 2007-09-07 | Mitsubishi Heavy Industries, Ltd. | 風力発電システム、及びその制御方法 |
| JP2007231911A (ja) * | 2006-03-03 | 2007-09-13 | Nabtesco Corp | 風車用センサ機構及び風車の減振方法 |
| JP2008075521A (ja) * | 2006-09-20 | 2008-04-03 | Hitachi Ltd | 風力発電システムおよびその運転方法 |
| JP2009068379A (ja) * | 2007-09-11 | 2009-04-02 | Mitsubishi Heavy Ind Ltd | 風力発電システム、及びその制御方法 |
| US20090224543A1 (en) * | 2008-03-06 | 2009-09-10 | Repower Systems Ag | Method for the operation of a wind power plant and wind power plant |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4348155A (en) * | 1980-03-17 | 1982-09-07 | United Technologies Corporation | Wind turbine blade pitch control system |
| DE19534404A1 (de) * | 1995-09-16 | 1997-03-20 | En Umwelt Beratung E V I | Verfahren zur Bestimmung des technischen Zustandes einer Windkraftanlage |
| US6600240B2 (en) * | 1997-08-08 | 2003-07-29 | General Electric Company | Variable speed wind turbine generator |
| US6265785B1 (en) * | 1998-11-30 | 2001-07-24 | Zond Systems, Inc. | Non-volatile over speed control system for wind turbines |
| US7476985B2 (en) * | 2005-07-22 | 2009-01-13 | Gamesa Innovation & Technology, S.L. | Method of operating a wind turbine |
| DE102006001613B4 (de) * | 2006-01-11 | 2008-01-31 | Repower Systems Ag | Verfahren zum Betreiben einer Windenergieanlage und Windenergieanlage |
| US8128361B2 (en) * | 2008-12-19 | 2012-03-06 | Frontier Wind, Llc | Control modes for extendable rotor blades |
| EP2365214B1 (en) * | 2009-01-22 | 2013-05-29 | Vestas Wind Systems A/S | Control of rotor during a stop process of a wind turbine |
-
2009
- 2009-12-22 EP EP09015864A patent/EP2339174A1/en not_active Withdrawn
-
2010
- 2010-12-16 US US12/969,927 patent/US8600570B2/en not_active Expired - Fee Related
- 2010-12-16 NZ NZ590012A patent/NZ590012A/en not_active IP Right Cessation
- 2010-12-20 CA CA2725964A patent/CA2725964A1/en not_active Abandoned
- 2010-12-22 CN CN2010105998618A patent/CN102102624A/zh active Pending
- 2010-12-22 JP JP2010286070A patent/JP2011132961A/ja active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003522950A (ja) * | 2000-02-08 | 2003-07-29 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 誘導センサ、特に回転数感知器 |
| JP2005220753A (ja) * | 2004-02-03 | 2005-08-18 | Fuji Heavy Ind Ltd | 水平軸風車及びその制御方法 |
| JP2006336513A (ja) * | 2005-05-31 | 2006-12-14 | Tokyo Electric Power Co Inc:The | ブレード構造、風力発電装置および風力発電装置の制御プログラム |
| JP2007023811A (ja) * | 2005-07-13 | 2007-02-01 | Shinko Electric Co Ltd | 風力発電設備 |
| WO2007099936A1 (ja) * | 2006-02-28 | 2007-09-07 | Mitsubishi Heavy Industries, Ltd. | 風力発電システム、及びその制御方法 |
| JP2007231911A (ja) * | 2006-03-03 | 2007-09-13 | Nabtesco Corp | 風車用センサ機構及び風車の減振方法 |
| JP2008075521A (ja) * | 2006-09-20 | 2008-04-03 | Hitachi Ltd | 風力発電システムおよびその運転方法 |
| JP2009068379A (ja) * | 2007-09-11 | 2009-04-02 | Mitsubishi Heavy Ind Ltd | 風力発電システム、及びその制御方法 |
| US20090224543A1 (en) * | 2008-03-06 | 2009-09-10 | Repower Systems Ag | Method for the operation of a wind power plant and wind power plant |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101466080B1 (ko) | 2013-05-03 | 2014-11-27 | 삼성중공업 주식회사 | 풍력 터빈 제어 장치 및 방법 |
| JP2016094934A (ja) * | 2014-11-06 | 2016-05-26 | 株式会社東芝 | 気流発生装置、および、風力発電システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2339174A1 (en) | 2011-06-29 |
| CN102102624A (zh) | 2011-06-22 |
| US8600570B2 (en) | 2013-12-03 |
| NZ590012A (en) | 2012-07-27 |
| US20110153097A1 (en) | 2011-06-23 |
| CA2725964A1 (en) | 2011-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011132961A (ja) | 風力タービンの非常用システムをトリガするためのシステムおよび方法、ならびに、風力タービン、コンピュータプログラムおよびコンピュータ読み取り可能な記録媒体 | |
| CN105041570B (zh) | 风电机组偏航控制方法和装置 | |
| US10062272B2 (en) | Method for testing a rotor blade ice detection system as well as rotor blade ice detection system and wind turbine for carrying out the method | |
| CN104838148B (zh) | 旋转设备中的失效预测 | |
| BR102014005474B1 (pt) | Sistema e método para a redução das cargas atuantes em uma turbina eólica | |
| CN104728040A (zh) | 检测桨距角调整故障 | |
| BR112013027452B1 (pt) | Método para monitorar desmagnetização de imãs permanentes em uma máquina síncrona | |
| US10975849B2 (en) | Condition monitoring system and wind turbine including the same | |
| US10895873B2 (en) | Machine health monitoring of rotating machinery | |
| US20140020465A1 (en) | Monitoring arrangement | |
| US10570883B2 (en) | System and method for protecting wind turbines during wind gusts | |
| EP3473846A1 (en) | Wind power generator system and method and program for controlling the same | |
| JP2019509418A5 (ja) | ||
| JP6570759B2 (ja) | 風力発電システムの振動状態を監視する方法 | |
| TWI700431B (zh) | 風力發電系統 | |
| JP2019074059A (ja) | 風力発電システム | |
| EP2881549B1 (en) | System and method for preventing an emergency over-speed condition in a rotating machine | |
| EP3042076B1 (en) | Safety system for a wind turbine | |
| EP3722597A1 (en) | System and method for preventing catastrophic damage in drivetrain of a wind turbine | |
| JP2024077839A (ja) | 風力発電設備用の異常診断システム、および、異常診断方法 | |
| KR20240031892A (ko) | 입력전류, 진동, 및 온도에 대한 센싱 결과를 이용하여 3상 모터의 고장을 진단하는 시스템 및 방법 | |
| KR20240069101A (ko) | 시계열로 측정된 3상 모터 진동 데이터의 분포 추정에 따른 고장 진단 방법 및 장치 | |
| KR101368754B1 (ko) | 바람 맞음각을 이용한 풍력 발전 시스템의 출력 제어 방법 및 장치 | |
| CN117529666A (zh) | 确定风力涡轮机转子速度 | |
| KR20200029931A (ko) | 풍력 발전기의 고장 진단 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140825 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20141121 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20141127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150608 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151109 |