JP2010538765A - 訓練装置用コンビネーショングリップ - Google Patents
訓練装置用コンビネーショングリップ Download PDFInfo
- Publication number
- JP2010538765A JP2010538765A JP2010525081A JP2010525081A JP2010538765A JP 2010538765 A JP2010538765 A JP 2010538765A JP 2010525081 A JP2010525081 A JP 2010525081A JP 2010525081 A JP2010525081 A JP 2010525081A JP 2010538765 A JP2010538765 A JP 2010538765A
- Authority
- JP
- Japan
- Prior art keywords
- grip
- loop
- training device
- strap
- elongated member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












































Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/002—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices isometric or isokinetic, i.e. substantial force variation without substantial muscle motion or wherein the speed of the motion is independent of the force applied by the user
- A63B21/0023—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices isometric or isokinetic, i.e. substantial force variation without substantial muscle motion or wherein the speed of the motion is independent of the force applied by the user for isometric exercising, i.e. substantial force variation without substantial muscle motion
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/16—Supports for anchoring force-resisters
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/16—Supports for anchoring force-resisters
- A63B21/1618—Supports for anchoring force-resisters on a door or a door frame
- A63B21/1663—Supports for anchoring force-resisters on a door or a door frame for anchoring between a door and the door frame
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/40—Interfaces with the user related to strength training; Details thereof
- A63B21/4001—Arrangements for attaching the exercising apparatus to the user's body, e.g. belts, shoes or gloves specially adapted therefor
- A63B21/4017—Arrangements for attaching the exercising apparatus to the user's body, e.g. belts, shoes or gloves specially adapted therefor to the upper limbs
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/40—Interfaces with the user related to strength training; Details thereof
- A63B21/4027—Specific exercise interfaces
- A63B21/4033—Handles, pedals, bars or platforms
- A63B21/4035—Handles, pedals, bars or platforms for operation by hand
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/035—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously
- A63B23/0355—A single apparatus used for either upper or lower limbs, i.e. with a set of support elements driven either by the upper or the lower limb or limbs
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B2023/006—Exercising apparatus specially adapted for particular parts of the body for stretching exercises
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/02—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using resilient force-resisters
- A63B21/04—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using resilient force-resisters attached to static foundation, e.g. a user
- A63B21/0442—Anchored at one end only, the other end being manipulated by the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/09—Adjustable dimensions
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Rehabilitation Tools (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
- Woven Fabrics (AREA)
- Professional, Industrial, Or Sporting Protective Garments (AREA)
Abstract
【選択図】図30B
Description
本発明は、様々な運動用に容易に設定可能な訓練装置用コンビネーショングリップを提供することで従来技術の不利益を克服するものである。例えば、ここに記載したいくつかの実施例には、訓練装置用調整可能なフットグリップが含まれている。
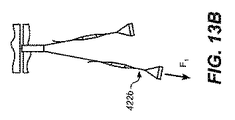
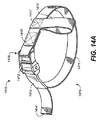
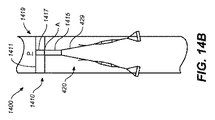
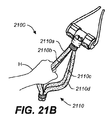
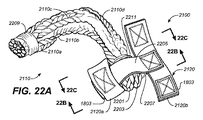
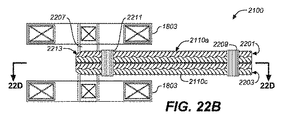
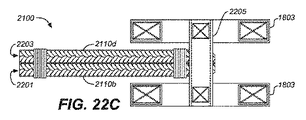
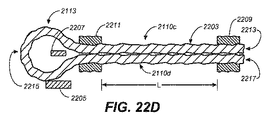
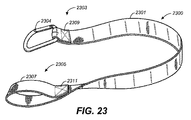
図14A、14B、23乃至26、及び29乃至32A−32Cにアンカの実施例をいくつか示す。特に記載されている場合を除いて、いずれかのアンカを用いて、訓練装置のいずれかの細長部材を支持している。以下の記載において、アンカの実施例は、説明のためのものであり、限定を意味するものではない。したがって、例えば、限定することなく、訓練装置の実施例はドアに、ポール、レールまたは支柱の周りにおいて、壁に取り付けたフックから固定することができ、または、たとえば壁あるいは訓練装置に恒久的に固定するようにしても良い。
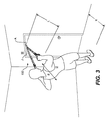
訓練装置100の使用は、ユーザが使用可能なグリップによって決まる。グリップによってユーザは、自分の体重を支えるのに十分な力でねじるなどにより、握ることができ、グリップはまた、ユーザが訓練装置の上で引っ張ると、ループまたはホック内にユーザを維持することができる装置を含む。このコンテキストにおいて、「握ることが可能な」との用語は、グリップの周囲に本体部分を巻きつけることができる、あるいは、身体の一部をグリップのループまたはホックを介して配置して、ユーザが訓練装置をグリップに対して引っ張って、身体部分をグリップ内に保つことを意味する。
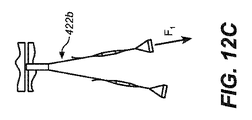
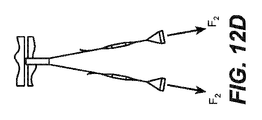
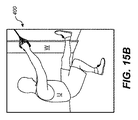
図12A−12Dに、訓練装置120の使用状態を示す。ここで、図12Aは、初期設定であり、図12Bは、細長部材420を伸ばした状態を示しており、図12B’と12B”にさらに伸ばした状態を示しており、図12Cは、細長部材の短い方の脚部に対する力のかかり具合を示し、図12Dは、訓練中のグリップに対する力のかかり具合を示す。図12A−12Dは、説明のためのものであり、本発明の訓練装置に一般的に適用される。
基本訓練 中級 上級
引張機能 引張機能 引張/側部機能
低ロウ 一腕低ロウ 側部上げ
高ロウ 一腕高ロウ 前肩上げ
プルアップ 一腕プルアップ 逆グリップカール
高カール 一腕高カール ロウ/キックバック組み合わせ
低カール 一腕低カール 手首内側回転
バックフライ 下胸部/上腕クランチ 手首外側回転
リストカール 逆グリップリストカール 2ウエイ前腕屈筋
コア強度 コア強度 コア強度
クランチ 膝立ちコンビネーション 立ちコンビネーションクランチ
逆片脚上げ 逆脚上げ 逆脚上げw/ヒップリフト
斜クランチ V字座り 逆斜上げ
逆クランチ ヒップリフト V字バランス
自転車 逆自転車 逆コンビネーションクランチ
バックブリッジ
脚部 脚部 脚部
スクアット 横臥ハムストリングペダル 横臥ハムストリングカール
ヒップヒンジ つま先スクアット 片脚ヒップヒンジ
スクアット突き出し 後退突き出し 片脚Lスクアット
相撲スクアット 片脚スクアット 直交後退突き出し
横から横の突き出し 片ふくらはぎ上げ 交差オフバランススクアット
ふくらはぎ上げ ジャンプスキーPT
押出機能 押出機能 押出機能
標準プレス 一腕斜めプレス 上腕キックバック
チェストフライ 低チェストプレス 一腕集中フライ
ショルダープレス (外側グリップ) 逆クランチ/プッシュアップ連続
頭上上腕伸ばし 逆プッシュアップ 一腕ショルダープレス
ラット−プルオーバ 一腕上腕伸ばし ジムナストディップ
Claims (24)
- 訓練装置のユーザが使用するグリップにおいて:
細長部材であって、当該細長部材が8字形状であり、交差部分と、前記訓練装置に取り付けた第1のループであって、前記交差部分に延在している第1のループと、前記交差部分から延在している第2のループと、を規定している細長部材と;
前記交差部分近傍で細長部材に摺動可能に取り付けたハンドグリップと;を具え、
前記第2のループのサイズが前記細長部材上の前記ハンドグリップの位置に応じて調整可能であることを特徴とするグリップ。 - 請求項1に記載のグリップにおいて、前記ハンドグリップが、第1の端部と第2の端部を有する中空円筒状部分を具え、前記交差部分が前記第1の端部と第2の端部の間にあることを特徴とするグリップ。
- 請求項1に記載のグリップにおいて、前記第2のループが足を拘束するサイズであることを特徴とするグリップ。
- 請求項1に記載のグリップにおいて、前記細長部材が紐であることを特徴とするグリップ。
- 請求項1に記載のグリップにおいて、前記第2のループのサイズが前記ハンドグリップを前記訓練装置から離れる方向に引っ張ることによって調整可能であることを特徴とするグリップ。
- 請求項1に記載のグリップにおいて、前記第2のループが前記訓練装置から引っ張られるときに、前記ハンドグリップが前記細長部材に係合することを特徴とするグリップ。
- 請求項6に記載のグリップにおいて、前記第2のループが前記訓練装置から引っ張られても、前記第2のループのサイズが実質的に変わらないことを特徴とするグリップ。
- 訓練装置のユーザが使用するグリップにおいて:
前記訓練装置に取り付けた細長部材と;
前記細長部材に摺動可能に取り付けたハンドグリップとを具え、
前記細長部材がループを形成し、前記ループが前記ハンドグリップへ延在しており、
前記ループのサイズが前記細長部材に沿って前記ハンドグリップの位置によって調整可能であることを特徴とするグリップ。 - 請求項8に記載のグリップにおいて、前記ループが第1のループであって、前記ハンドグリップが第1の端部と第2の端部を有する中空筒状部分を具え、前記細長部材が8字形状であり、交差部分を規定している第1のループと、前記訓練装置に取り付けられている第2のループであって、前記第2のループが前記交差部分に延在している第2のループを具え、前記第1のループが前記交差部分から延在しており、前記交差部分が前記第1の端部と第2の端部に接触することを特徴とするグリップ。
- 請求項8に記載のグリップにおいて、前記第1のループが足を拘束するサイズであることを特徴とするグリップ。
- 請求項8に記載のグリップにおいて、前記細長部材が紐であることを特徴とするグリップ。
- 請求項8に記載のグリップにおいて、前記ハンドグリップが前記細長部材から取り外し可能であることを特徴とするグリップ。
- 請求項8に記載のグリップにおいて、前記第1のループのサイズが前記ハンドグリップを前記訓練装置から離れる方向に引っ張ることによって調整可能であることを特徴とするグリップ。
- 請求項8に記載のグリップにおいて、前記第1のループが前記訓練装置から引っ張られるときに、前記ハンドグリップが前記細長部材に係合することを特徴とするグリップ。
- 請求項14に記載のグリップにおいて、前記第1のループが前記訓練装置から引っ張られても、前記第1のループのサイズが実質的に変わらないことを特徴とするグリップ。
- 訓練装置のユーザが使用するグリップにおいて、当該グリップが:
前記訓練装置に取り付けた細長部材であって、フレキシブル材料を具える細長部材と;
前記細長部材に摺動可能に取り付けたハンドグリップと;を具え、
前記細長部材の一部が、前記ハンドグリップに各々が接触するループ端部を有するループであり、
前記ループ端部間の前記ループの細長部材の長さが、前記細長部材の上の前記ハンドグリップの位置に応じて調整可能であることを特徴とするグリップ。 - 請求項16に記載のグリップにおいて、前記ループが第1のループであり、前記細長部材が前記訓練装置に取り付けた第2のループであることを特徴とするグリップ。
- 請求項16に記載のグリップにおいて、前記第1のループが足を拘束するサイズであることを特徴とするグリップ。
- 請求項16に記載のグリップにおいて、前記フレキシブル材料が紐であることを特徴とするグリップ。
- 請求項16に記載のグリップにおいて、前記ハンドグリップが前記細長部材から取り外し可能であることを特徴とするグリップ。
- 請求項16に記載のグリップにおいて、前記第1のループの前記細長部材の長さが前記ハンドグリップを前記訓練装置から離れる方向に引っ張ることによって調整可能であることを特徴とするグリップ。
- 請求項16に記載のグリップにおいて、前記ハンドグリップが一またはそれ以上の通路を具え、前記細長部材が当該一又はそれ以上の通路の少なくとも一つを通ることを特徴とするグリップ。
- 請求項16に記載のグリップにおいて、前記ハンドグリップが中空筒状部分を備え、前記細長部材が交差部分を規定する8字形状をしており、前記交差部分が前記中空筒状部分内にあることを特徴とするグリップ。
- 実質的に上述したような装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US97311807P | 2007-09-17 | 2007-09-17 | |
| US12/209,151 US20090105053A1 (en) | 2003-04-09 | 2008-09-11 | Combination grip for an exercise device |
| PCT/US2008/076544 WO2009039106A1 (en) | 2007-09-17 | 2008-09-16 | Combination grip for an exercise device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010538765A true JP2010538765A (ja) | 2010-12-16 |
| JP2010538765A5 JP2010538765A5 (ja) | 2012-08-02 |
Family
ID=40468288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010525081A Pending JP2010538765A (ja) | 2007-09-17 | 2008-09-16 | 訓練装置用コンビネーショングリップ |
Country Status (16)
| Country | Link |
|---|---|
| US (1) | US20090105053A1 (ja) |
| EP (1) | EP2195098A4 (ja) |
| JP (1) | JP2010538765A (ja) |
| KR (1) | KR20100100758A (ja) |
| CN (1) | CN101801469A (ja) |
| AU (1) | AU2008302427A1 (ja) |
| BR (1) | BRPI0816010A2 (ja) |
| CA (1) | CA2699777A1 (ja) |
| CO (1) | CO6270247A2 (ja) |
| IL (1) | IL204532A0 (ja) |
| MX (1) | MX2010002795A (ja) |
| MY (1) | MY166330A (ja) |
| NZ (1) | NZ584628A (ja) |
| RU (1) | RU2455044C2 (ja) |
| WO (1) | WO2009039106A1 (ja) |
| ZA (1) | ZA201002657B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112569539A (zh) * | 2020-12-07 | 2021-03-30 | 湖南省嘉联医疗器械有限公司 | 一种医疗康复用体能训练装置 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7044896B2 (en) * | 2003-04-09 | 2006-05-16 | Fitness Anywhere, Inc. | Exercise device including adjustable, inelastic straps |
| US8075462B1 (en) | 2010-01-28 | 2011-12-13 | Robert S. Hinds | Elastic member exercise device |
| US8197392B2 (en) | 2010-08-03 | 2012-06-12 | Astone Fitness Ltd. | Suspendible exercise straps |
| WO2012027371A1 (en) * | 2010-08-24 | 2012-03-01 | Jon Hinds | Suspension training exercise device |
| WO2013003280A1 (en) * | 2011-06-27 | 2013-01-03 | Adam White | Exercise apparatus and method of exercise |
| US9333385B2 (en) * | 2012-07-17 | 2016-05-10 | Pivotal 5, Llc | Exercise device with elastic members and webbing |
| US20140080687A1 (en) * | 2012-09-14 | 2014-03-20 | John Stuef | Resistance-based exercise device |
| US8979716B1 (en) | 2014-06-20 | 2015-03-17 | Kenneth C. Rawlins | Portable exercise equipment |
| US9757604B2 (en) | 2015-08-18 | 2017-09-12 | Matthew Roderick Carter | Multipurpose exercise training device |
| US20190201732A1 (en) * | 2018-01-02 | 2019-07-04 | Chung-Fu Chang | Belt pulling exercise apparatus |
| KR101890689B1 (ko) | 2018-03-22 | 2018-08-22 | 김정원 | 운동기구용 멀티그립조립체 |
| US10953302B2 (en) | 2018-06-29 | 2021-03-23 | Palladium Safety Solutions, Inc. | Guard to limit abrasions during use of gymnastics rings and method of using same |
| CN109224389B (zh) * | 2018-09-21 | 2024-03-08 | 常州市肿瘤医院(常州市第四人民医院) | 乳腺癌术后康复装置 |
| TWI684475B (zh) * | 2018-11-06 | 2020-02-11 | 王羽暄 | 壁掛式伸展運動用具 |
| US11083926B2 (en) * | 2018-11-30 | 2021-08-10 | Robert Yanez | Exercise device |
| USD973158S1 (en) * | 2020-04-09 | 2022-12-20 | Reestar International Limited | Combination grip for an exercise device |
| RU2759468C1 (ru) * | 2020-11-16 | 2021-11-15 | Родион Альфредович Гумеров | Подвесной тренажер для тренировок с весом собственного тела |
| USD998069S1 (en) | 2021-01-05 | 2023-09-05 | Joshua Hunter | Resistance band sleeve |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5514057A (en) * | 1992-06-05 | 1996-05-07 | Ciolino; Peter A. | Bathtub exercise platform and exercise method |
| JP3071354U (ja) * | 2000-02-28 | 2000-08-29 | 藤井金属化工株式会社 | ぶら下がり健康器具 |
| JP2003325700A (ja) * | 2002-05-15 | 2003-11-18 | Kiyoma Hamazaki | 足指の前後屈伸運動補助用具 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3117782A (en) * | 1962-01-15 | 1964-01-14 | Lyman C Johnston | Physical exercise apparatus including cables attachable at one end to the user's legs |
| US4059265A (en) * | 1976-01-22 | 1977-11-22 | Wieder Horst K | Elastic pull-type exerciser |
| US4027876A (en) * | 1976-04-07 | 1977-06-07 | Lyman Clarke Johnston | Exercising apparatus |
| US4047714A (en) * | 1976-04-15 | 1977-09-13 | Powell Truman W | Push pull type exercising device |
| US4251071A (en) * | 1978-08-17 | 1981-02-17 | Norton Craig D | Exercising device with compressible hand grip on an elastic card |
| US4257592A (en) * | 1978-11-29 | 1981-03-24 | Arthur Jones | Exercising apparatus with improvements in handle structure, rope arrangement, and clamping means |
| US4756527A (en) * | 1987-04-14 | 1988-07-12 | Ledbetter Daniel R | Gripping assembly for use with cable exercising equipment |
| US5254065A (en) * | 1991-12-16 | 1993-10-19 | Pollock Todd E | Flexible loop fastening strap supportable in door structure |
| US5433688A (en) * | 1992-04-24 | 1995-07-18 | Davies; Phillip H. | Exercise device worn on the user's body having resilient resistance mechanisms |
| RU2184588C2 (ru) * | 2000-08-01 | 2002-07-10 | Соловьев Владимир Владимирович | Тренажер |
| RU25419U1 (ru) * | 2002-04-04 | 2002-10-10 | Дальневосточная государственная морская академия им. адмирала Г.И.Невельского | Тренажер для спортсменов-единоборцев |
| US6652419B1 (en) * | 2002-05-20 | 2003-11-25 | James Eugene Rota | Integrated exercise and conditioning system for the human body |
| US7806814B2 (en) * | 2003-04-09 | 2010-10-05 | Fitness Anywhere, Inc. | Combination grip for an exercise drive |
| US20070027005A1 (en) * | 2003-04-09 | 2007-02-01 | Randal Hetrick | Exercise device grips and accessories for exercise devices |
| US7044896B2 (en) * | 2003-04-09 | 2006-05-16 | Fitness Anywhere, Inc. | Exercise device including adjustable, inelastic straps |
| US7785244B2 (en) * | 2007-09-17 | 2010-08-31 | Fitness Anywhere Inc. | Combination grip for an exercise device |
| US8043197B2 (en) * | 2007-09-17 | 2011-10-25 | Fitness Anywhere LLC | Exercise device having inelastic straps and interchangeable parts |
| US20090075790A1 (en) * | 2007-09-17 | 2009-03-19 | Randal Hetrick | Combination anchor for an exercise device |
| US7762932B2 (en) * | 2007-09-17 | 2010-07-27 | Fitness Anywhere, Inc. | Inelastic exercise device having a limited range |
| US8083653B2 (en) * | 2007-09-17 | 2011-12-27 | Fitness Anywhere, Llc | Exercise device having a door anchor |
-
2008
- 2008-09-11 US US12/209,151 patent/US20090105053A1/en not_active Abandoned
- 2008-09-16 MY MYPI2010001153A patent/MY166330A/en unknown
- 2008-09-16 EP EP08832297A patent/EP2195098A4/en not_active Withdrawn
- 2008-09-16 CN CN200880107138A patent/CN101801469A/zh active Pending
- 2008-09-16 BR BRPI0816010-4A patent/BRPI0816010A2/pt not_active Application Discontinuation
- 2008-09-16 RU RU2010112481/12A patent/RU2455044C2/ru not_active IP Right Cessation
- 2008-09-16 WO PCT/US2008/076544 patent/WO2009039106A1/en active Application Filing
- 2008-09-16 AU AU2008302427A patent/AU2008302427A1/en not_active Abandoned
- 2008-09-16 KR KR1020107008212A patent/KR20100100758A/ko not_active Application Discontinuation
- 2008-09-16 JP JP2010525081A patent/JP2010538765A/ja active Pending
- 2008-09-16 MX MX2010002795A patent/MX2010002795A/es active IP Right Grant
- 2008-09-16 CA CA2699777A patent/CA2699777A1/en not_active Abandoned
- 2008-09-16 NZ NZ584628A patent/NZ584628A/xx unknown
-
2010
- 2010-03-16 IL IL204532A patent/IL204532A0/en unknown
- 2010-04-15 ZA ZA2010/02657A patent/ZA201002657B/en unknown
- 2010-04-16 CO CO10044726A patent/CO6270247A2/es not_active Application Discontinuation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5514057A (en) * | 1992-06-05 | 1996-05-07 | Ciolino; Peter A. | Bathtub exercise platform and exercise method |
| JP3071354U (ja) * | 2000-02-28 | 2000-08-29 | 藤井金属化工株式会社 | ぶら下がり健康器具 |
| JP2003325700A (ja) * | 2002-05-15 | 2003-11-18 | Kiyoma Hamazaki | 足指の前後屈伸運動補助用具 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112569539A (zh) * | 2020-12-07 | 2021-03-30 | 湖南省嘉联医疗器械有限公司 | 一种医疗康复用体能训练装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101801469A (zh) | 2010-08-11 |
| EP2195098A4 (en) | 2011-12-21 |
| AU2008302427A1 (en) | 2009-03-26 |
| EP2195098A1 (en) | 2010-06-16 |
| MY166330A (en) | 2018-06-25 |
| BRPI0816010A2 (pt) | 2012-03-27 |
| MX2010002795A (es) | 2010-07-28 |
| RU2455044C2 (ru) | 2012-07-10 |
| NZ584628A (en) | 2012-09-28 |
| ZA201002657B (en) | 2011-04-28 |
| US20090105053A1 (en) | 2009-04-23 |
| KR20100100758A (ko) | 2010-09-15 |
| CO6270247A2 (es) | 2011-04-20 |
| RU2010112481A (ru) | 2011-10-27 |
| CA2699777A1 (en) | 2009-03-26 |
| IL204532A0 (en) | 2010-11-30 |
| WO2009039106A1 (en) | 2009-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5561734B2 (ja) | 範囲が制限された非弾性訓練装置 | |
| JP2010538765A (ja) | 訓練装置用コンビネーショングリップ | |
| JP2010538766A (ja) | 非弾性ストラップおよび交換可能な部分を有する訓練装置 | |
| JP2010538768A (ja) | 訓練装置用のコンビネーションアンカ | |
| CA2634464C (en) | Exercise device with adjustable inelastic straps | |
| US7785244B2 (en) | Combination grip for an exercise device | |
| JP5731099B2 (ja) | 運動器具用の組合せグリップ | |
| JP2010538769A (ja) | ドアアンカを有する訓練装置 | |
| EP1945319A2 (en) | Combination grip for an exercise device | |
| BRPI0815870B1 (pt) | Dispositivo de exercícios fixado a uma estrutura |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110915 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110915 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20120529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120619 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130507 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130807 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130814 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130909 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130917 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131007 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131015 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140107 |