JP2010035307A - アキシャルギャップ型モータ - Google Patents
アキシャルギャップ型モータ Download PDFInfo
- Publication number
- JP2010035307A JP2010035307A JP2008193583A JP2008193583A JP2010035307A JP 2010035307 A JP2010035307 A JP 2010035307A JP 2008193583 A JP2008193583 A JP 2008193583A JP 2008193583 A JP2008193583 A JP 2008193583A JP 2010035307 A JP2010035307 A JP 2010035307A
- Authority
- JP
- Japan
- Prior art keywords
- metal plate
- axial gap
- contact
- stator
- circumferential direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
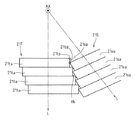
【解決手段】アキシャルギャップ型モータ100は、回転軸AXの方向に距離を置いてロータ10と対向するステータ20を備えている。ステータ20は、複数の分割コア21により構成されており、各分割コア21は、積層された複数の金属板21aから構成されている。第一の分割コア21Sを構成する第一の金属板21saの第一の端縁部21spは、第一の分割コア21Sと隣接する第二の分割コア21Tを構成する第二の金属板21taの側面部の、第二の端縁部を除く領域21tdと接している。
【選択図】図4
Description
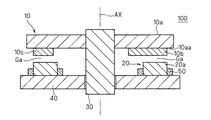
図1は、実施の形態1に係るアキシャルギャップ型モータ100の構造を示す断面図である。
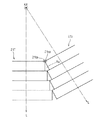
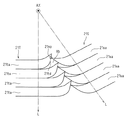
分割コア21を構成する金属板21aを整形処理する場合には、プレス裁断が採用される。当該プレス裁断を採用した場合には、裁断された側の金属板21aの縁には、図7に示すように、面取り部21mとバリ部21nとが形成される。金属板21aにおいて、プレス裁断開始側に面取り部21mが形成され、プレス裁断終了側においてバリ部21nが形成される。
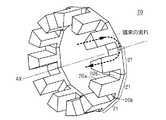
実施の形態1,2では、図3に示した凸形状の分割コア21を回転軸AXの周方向に配設することにより、図2で示したステータ20を構成していた。この場合、図2に示すように隣接する分割コア21同士の接続位置は、各ティース部20a間の基部20bに存する。
10a バックヨーク
10b 永久磁石
10c リラクタンスコア
20 ステータ
20a ティース部
20b 基部
21,51 分割コア
21S 第一の分割コア
21T 第二の分割コア
21a,51a 金属板
21sa 第一の金属板
21sp,21np,21spm 第一の端縁部
21ta 第二の金属板
21tp 第二の端縁部
21td 限定領域
21m 面取り部
21n バリ部
30 シャフト
40 基板
50 巻線
100 アキシャルギャップ型モータ
da 金属板の厚さ
Vb 空隙
L 径方向
AX 回転軸
Ga 間隙
Claims (3)
- 回転軸(AX)を中心として周方向に回転するロータ(10)と、
前記回転軸の方向に距離を置いて、前記ロータと対向するステータ(20)と
を備え、
前記ステータは、前記周方向に配設された複数の分割コア(21)により構成されており、
前記分割コアは、前記回転軸を中心とした径方向に積層された複数の金属板(21a)から構成されており、
第一の前記分割コア(21S)を構成する第一の前記金属板(21sa)の前記周方向に現れる前記回転軸に近い側の第一の端縁部(21sp)は、前記第一の分割コアと隣接する第二の前記分割コア(21T)を構成する第二の前記金属板(21ta)の前記周方向に現れる側面部の、前記第二の金属板の第二の端縁部を除く領域(21td)と接していること、を特徴とするアキシャルギャップ型モータ。 - 前記第一の端縁部は、前記第二の金属板の前記側面部に対し、前記第二の金属板の厚み方向の半分の位置で接していること、を特徴とする請求項1に記載のアキシャルギャップ型モータ。
- 前記第一の端縁部(21spm)は面取りされていること、を特徴とする請求項1に記載のアキシャルギャップ型モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008193583A JP5163341B2 (ja) | 2008-07-28 | 2008-07-28 | アキシャルギャップ型モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008193583A JP5163341B2 (ja) | 2008-07-28 | 2008-07-28 | アキシャルギャップ型モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010035307A true JP2010035307A (ja) | 2010-02-12 |
| JP5163341B2 JP5163341B2 (ja) | 2013-03-13 |
Family
ID=41739137
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008193583A Expired - Fee Related JP5163341B2 (ja) | 2008-07-28 | 2008-07-28 | アキシャルギャップ型モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5163341B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5532696U (ja) * | 1978-08-25 | 1980-03-03 | ||
| JP2005224054A (ja) * | 2004-02-06 | 2005-08-18 | Fujitsu General Ltd | アキシャルギャップ型電動機 |
| JP2006050745A (ja) * | 2004-08-03 | 2006-02-16 | Nissan Motor Co Ltd | アキシャルギャップ回転電機 |
| JP2008017552A (ja) * | 2006-07-03 | 2008-01-24 | Jtekt Corp | モータ及び電動パワーステアリング装置 |
| JP2010031670A (ja) * | 2008-07-25 | 2010-02-12 | Daikin Ind Ltd | 圧縮機 |
| JP2010035268A (ja) * | 2008-07-25 | 2010-02-12 | Daikin Ind Ltd | アキシャルギャップ型モータ |
-
2008
- 2008-07-28 JP JP2008193583A patent/JP5163341B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5532696U (ja) * | 1978-08-25 | 1980-03-03 | ||
| JP2005224054A (ja) * | 2004-02-06 | 2005-08-18 | Fujitsu General Ltd | アキシャルギャップ型電動機 |
| JP2006050745A (ja) * | 2004-08-03 | 2006-02-16 | Nissan Motor Co Ltd | アキシャルギャップ回転電機 |
| JP2008017552A (ja) * | 2006-07-03 | 2008-01-24 | Jtekt Corp | モータ及び電動パワーステアリング装置 |
| JP2010031670A (ja) * | 2008-07-25 | 2010-02-12 | Daikin Ind Ltd | 圧縮機 |
| JP2010035268A (ja) * | 2008-07-25 | 2010-02-12 | Daikin Ind Ltd | アキシャルギャップ型モータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5163341B2 (ja) | 2013-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101461119B (zh) | 分割型定子铁心及其制造方法、定子铁心 | |
| JP5238231B2 (ja) | 回転電機の回転子 | |
| CN101741153A (zh) | 电枢铁心、使用了该电枢铁心的电动机、轴向间隙型旋转电动机、及其制造方法 | |
| JP6385588B2 (ja) | 回転子および回転電機 | |
| JP2008271652A (ja) | 永久磁石式回転電機 | |
| JP2010106908A (ja) | 磁気軸受 | |
| JP2018057155A (ja) | 回転電機の回転子 | |
| WO2017195498A1 (ja) | 回転子および回転電機 | |
| JP2013115899A (ja) | 永久磁石式電動機の回転子及びその製造方法並びに永久磁石式電動機 | |
| CN102916510A (zh) | 旋转电机 | |
| JP2010115017A (ja) | アキシャルギャップ型回転電機 | |
| JP2010183792A (ja) | 電動機 | |
| JP5674962B2 (ja) | 永久磁石埋込型電動機 | |
| JP2012125111A (ja) | アウターロータ型回転機のロータ | |
| JP2010081776A (ja) | 同期電動機の回転子及び同期電動機の回転子の製造方法 | |
| JP2010035268A (ja) | アキシャルギャップ型モータ | |
| JP5163341B2 (ja) | アキシャルギャップ型モータ | |
| JP2006136130A (ja) | 永久磁石式回転電機、それに用いる永久磁石の製造方法およびその製造方法を用いた永久磁石式回転電機の製造方法 | |
| JP4568639B2 (ja) | ステータ | |
| CN106063085A (zh) | 转子 | |
| JP2005057865A (ja) | 回転子の構造 | |
| JP6080734B2 (ja) | 回転電機及びエレベータ用巻上機 | |
| JP2013207805A (ja) | 積層固定子鉄心、積層固定子鉄心の製造方法 | |
| JP5750995B2 (ja) | 同期電動機 | |
| JP2009038897A (ja) | アキシャルギャップ型モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110520 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121203 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151228 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151228 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |