JP2010026645A - 設備の設計支援装置、方法、およびプログラム - Google Patents
設備の設計支援装置、方法、およびプログラム Download PDFInfo
- Publication number
- JP2010026645A JP2010026645A JP2008184975A JP2008184975A JP2010026645A JP 2010026645 A JP2010026645 A JP 2010026645A JP 2008184975 A JP2008184975 A JP 2008184975A JP 2008184975 A JP2008184975 A JP 2008184975A JP 2010026645 A JP2010026645 A JP 2010026645A
- Authority
- JP
- Japan
- Prior art keywords
- pipe
- vector
- plane
- connection
- straight pipe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




































Abstract
【解決手段】設備内の第1の機器の接続部に接続される配管の経路を記憶する経路記憶手段と、第1の機器を第2の機器に変更する指定を受け付ける入力手段と、第1の機器を第2の機器に変更したときに第2の機器において配管が接続されるべき接続部の位置座標とその位置座標での配管の配置方向とを算出する接続位置算出手段と、変更前に第1の機器の接続部に接続されていた配管末端または配管末端から配管をさかのぼる方向に一部を削除して形成された配管末端から、第2の機器の接続部までの配管の経路を設定する経路設定手段と、を備える。
【選択図】図7
Description
、比較の結果、第1の機器の接続部と第2の機器の接続部との間で接続属性情報が一致しない場合に、前記第1の機器の接続部と第2の機器の接続部との間の経路設定のための対応関係の入力を促す手段を備えてもよい。本設計支援装置によれば、接続属性情報が一致しない場合に、第2の機器の接続口に対応すべき第1の機器の接続口の入力を促し、接続すべき配管末端を特定できる。
の関係を、平面を共有する関係に帰着し、処理を実行する。
<機能概要>
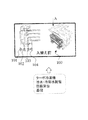
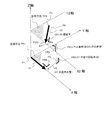
図1により、本設計支援装置の機能概要を例示する。本設計支援装置は、配管を含む様々な設備、具体的には配管の接続される熱源機器や空調機器、例えば、冷凍機を含む温度制御設備の設計を支援する。このような設備では、冷凍機等の機器の据え付けの他、機器への配管の取り付けが必要である。
(1)接続位置
接続位置は、本設計支援装置では、例えば、機器ごとの原点に対する相対座標(U,V,W)で指定され機器マスタに格納され、その接続位置に対応して、画面上では例えば、機器120に対する接続位置が、A1からE1の記号で示されている。また、本設計支援装置は、一旦、機器が設備内に配置されると、設備内の座標系(X,Y,Z)で接続位置を保持する。
(2)方向
方向とは、該当機器から見た配管中の流体の出入りの方向であり、流れ方向ともいう。流れ方向は、出または入りが指定される。
(3)接続口の用途分類
接続口の用途分類は、その機器の各接続口から流入または流出される流体の用途である。用途は、本設計支援装置の用途マスタに定義されている。用途は、例えば、温水(送り)、温水(帰り)、蒸気、蒸気還水、水抜き等が記号で指定される。
(4)系統
系統とは一次側、二次側等である。系統も、本設計支援装置の系統マスタに記号で定義されている。
(5)サイズ
サイズとは、配管の断面寸法(呼び径)である。
報が不一致の例を示す。この例では、接続位置C1の蒸気管の接続口、接続口D1の蒸気還水の接続口、および接続口E1の水抜きの接続口が消滅し、新たに接続位置C2に温水(送り)の接続口、接続位置D2に温水(帰り)の接続口が設けられている。この例では、温水供給用の熱媒として蒸気を使用する予定であったものが取り止めとなり、温水によって二次側に温水を供給することになった例である(一次側機器も例えば、蒸気ボイラから温水ボイラに変更される)。熱媒の変更により、熱交換器も適した型式に変更され流体の接続口の仕様が変更されている。また、図4は、例えば、メーカの変更に伴い、当初のA社の機器の入口位置が変更後のB社の機器の出口位置となったように、接続口が反転した例を示している。
直線形状、曲面と平面と組み合わせで定義される。ただし、立体形状、例えば、直方体、所定断面の押し出し(スイープ)形状等を組み合わせて定義することもできる。
(ハードウェア構成)
図6に、本設計支援装置のハードウェア構成を例示する。この設計支援装置は、例えば、パーソナルコンピュータと、パーソナルコンピュータで実行されるコンピュータプログラムによって実現される。また、この設計支援装置は、複数のパーソナルコンピュータにサービスを提供するサーバ上のプログラムとして実現してもよい。また、本設計支援装置は、複数のコンピュータが連携して機能を提供するコンピュータシステムとして実現してもよい。例えば、1以上のデータベースサーバと、1以上のシミュレータと、1以上のウェブサーバとによって、設計支援装置を実現してもよい。
(機能ブロック)
図7に、本設計支援装置の機能ブロック図を例示する。図7のように、本設計支援装置の機能ブロックは、表示装置8および入力装置6を制御し、設計支援装置の機能を提供する制御部20によって実現される。制御部20は、例えば、図2に示したCPU1、メモリ2等の構成と、図6のメモリ2に展開され、CPU1で実行されるコンピュータプログラムとによって実現される。このプログラムは、コンピュータが読み取り可能で、コンピュータから着脱可能な記憶媒体に格納し、コンピュータにインストールするようにしてもよい。また、ネットワーク上のサーバからコンピュータにダウンロードし、インストールするようにしてよい。また、プログラム自体は、ネットワーク上のサーバにインストールしておき、プログラムの機能だけをコンピュータを利用するユーザに提供してもよい。
手段32、第1のレベル間接続手段33、および第2のレベル間接続手段34を有している。
、複数目標平面経路設定手段32は、2つの座標軸に平行な第3の目標平面上の経路であって、起点ベクトルの示す接続部から90度継手、45度継手、起点ベクトル方向への直管と90度継手との組み合わせ、または、前記他方のベクトル方向の直管と45度継手との組み合わせによって接続可能な第1の直管の経路を設定する。その設定とともに、複数目標平面経路設定手段32は、2つの座標軸に平行な第4の目標平面上の経路であって、終点ベクトルの示す接続部から90度継手、45度継手、終点ベクトル方向への直管と90度継手との組み合わせ、または、前記他方のベクトル方向の直管と45度継手との組み合わせによって接続可能な第2の直管の経路を設定する。このとき、第2のレベル間接続手段34は、第2の直管から第1の直管への配管の経路を設定する。
(データ構造)
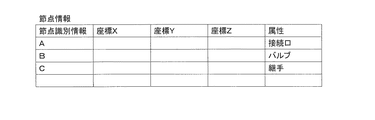
図8から図11に、本設計支援装置が処理する主要なデータの構造を示す。これらのデータ構造で示す情報はメモリ2またはハードディスク上のファイルに、作図に際し確定ボタンが押されるなどして確定の信号を受けたときに格納される。図8は、節点情報ファイルのデータ構造例を示す図である。節点情報ファイルは、配管の経路を記録するファイルである。節点情報ファイルは、節点識別情報と、座標X、座標Y、座標Z、および属性を有する。節点識別情報は、節点を個々に識別する識別情報である。座標X、座標Y、および座標Zは、節点の座標である。また、属性は、節点の属性であり、例えば、接続口、バルブ、45度継手、90度継手、45度の整数倍の角度以外の角度で経路を替える継手(任意角継手という)等が設定される。なお、節点の属性は、節点属性マスタに記号で定義されており、節点情報ファイルの属性には、その定義された記号が設定される。
される設置現場、設置建物等によって影響を受ける情報は登録されない。また、機器マスタの情報は、新たな機器の追加にしたがってユーザにより順次登録される。図10は、機器マスタの1レコード例であり、1つの機器についての情報を示している。機器マスタは、機器識別情報、外形形状情報へのポインタ、配置基準点、接続口数、および接続口ごとの情報の並びを有する。
に機器の配置基準点を設定し、向きが示す回転角を設定することで、機器の位置と向きが確定する。
(処理フロー)
図12に、本設計支援装置における機器入れ替え時のメイン処理フローを例示する。以下、ここでは、機器に配管が接続された設備の設計図が画面に表示されているものとする。この処理は、ユーザが入力装置6を通じて、機器入れ替えコマンドを入力することで起動される(S1)。ただし、本処理は、例えば、画面上のメニュー、あるいは、ボタン等のグラフィックユーザインターフェース部品(以下、GUI部品という)の選択によっても、起動される。なお、本処理が起動された後に、エスケープキーが入力されると(S2でYESの場合)、本コマンドによる処理は終了する(S3)。
)。配置基準点は、当該機器を作図画面の座標系の配置点に置く位置である。配置基準点は、例えば、機器内の平面図の座標系(U,V)で指定される。配置基準点の指定が省略されると、機器内の座標系の原点が、配置基準点となる。このとき、さらに、機器を配置する向きの指定も受け付ける。向きは、作図画面の平面図の座標系(X,Y)に対する機器内の座標系(U,V)の回転角である。向きの指定が省略された場合、作図画面の座標系(X,Y)と、機器内の座標系(U,V)とは、向きが一致する。
図12のS13で作成したもの)から、1つのレコードを読み出す(S151)。1つのレコードには、機器入れ替え前の接続口情報と機器入れ替え前の接続口情報が一対記録されている。
0度継手との組み合わせ、または、直管と45度継手との組み合わせによって、縦管に接続してもよい。そして、縦管を終点ベクトルP2のある平面にまで延伸し、90度継手または45度継手によって、終点ベクトルP2のある平面上の配管に接続すればよい。
図16に、起点ベクトルV1と終点ベクトルV2とが平行かつ対向している例を示す。2つのベクトルが平行か否かは、2つのベクトルの内積で判定できる。また、平行な2つのベクトルが対向しているか否かは、2つのベクトルに対して、それぞれ長さ1の単位ベクトルを求め、2つの単位ベクトルの加算結果がキャンセルして0(または0に近い許容値ε以下の値になるか)、2つの単位ベクトルの加算結果が単位ベクトルの2倍の大きさのベクトルに近づくか、によって判定すればよい。なお、ここでは、起点ベクトルV1と終点ベクトルV2とが行き違いの場合(図22参照)を除外する。行き違いの状態にあるか、否かの判定方法は、(B)にて説明する。
の直線L2に垂直な平面PLN2と、他方の直線L1との交点から、一方の直線L2に引いた垂線の長さとして求めることができる。
起点ベクトルV1と終点ベクトルV2とが平行かつ対向している場合(M21でYESの場合)、本設計支援装置は、対向ベクトル処理を実行する(M22)。対向ベクトル処理は、起点P1と起点P2との位置関係、および起点ベクトルV1と終点ベクトルV2と位置の関係を分類することで処理、例えば継手による接続の描画がされる。
(1)距離ΔD1=0または距離D1<所定の許容値ε;
これは、起点P1からの起点ベクトルV1と終点P2からの終点ベクトルV2とが、同一直線上にある場合である。この場合には、起点P1と終点P2とを直管で接続する。図17に、起点P1と、終点P2とを直管で接続する例を示す。
(2)許容値ε<距離ΔD1<L45RMIN;
L45RMINは、2つの平行な配管を45度継手で接続するための最低限必要な、配管に垂直な方向の距離である。L45RMINは、45度継手の配管に垂直は方向の長さと、45度継手間の直管の最低長さLMINから定まる値であり、継手の製造上の形状特性で決定されるカタログ値である。この場合に、接続すべき開口と開口との間の接続点ベクトル(起点ベクトルV1、終点ベクトルV2)に平行な方向の距離によって以下のように、さらに場合分けする。
(2−1)LAPMIN<距離ΔD2;
LAPMINは、互いに対向する配管同士を任意角継手で接続するために必要な配管に平行な方向の最低限の距離である。LAPMINは、継手の配管に平行な方向の長さと、継手間の直管の最低長さLMINから定まる値であり、継手の製造上の形状特性で決定されるカタログ値である。
(2−2)距離ΔD2<LAPMIN;
この場合には、任意角継手を起点P1と終点P2との間に配置できないため、90度継手を複数組み合わせて、迂回路を形成する。図19に、迂回路を形成して、起点P1と終点P2とを接続する例を示す。ここでは、起点P1、直管1、90度継手、直管2、90度継手、直管3、90度継手、直管4、90度継手、終点P2によって、迂回路が形成される。これによって、直管1によって、起点P1の位置がP11まで移動されることになる。なお、起点P1を含む配管PIPE1または終点P2を含む配管PIPE2と、迂回路とが干渉する場合、そのまま干渉が生じる状態で維持してもよいが、配管PIPE1の中心軸および配管PIPE2の中心軸を中心に、迂回路を揺動した位置に移動した上で直管2および直管4の長さを調整すればよい。すなわち、直管3を紙面に垂直な上下方向にシフトし、直管2および直管4を紙面に斜め方向にして接続すればよい。
(3)L45RMIN<距離ΔD1<L90RMIN;
この場合も、接続すべき開口と開口との間の接続点ベクトル(起点ベクトルV1、終点ベクトルV2)に平行な方向の距離によって以下のように、さらに場合分けする。なお、L90RMINは、2つの平行な配管を90度継手で接続するための最低限必要な、配管同士の距離である。L90RMINは、90度継手の配管に垂直な方向の長さと、90度継手間の直管の最低長さLMINから定まる値であり、継手の製造上の形状特性で決定されるカタログ値である。
(3−1)L45PMIN<距離ΔD2;
L45PMINは、対向する配管同士、平行な配管同士を45度継手で接続するために必要な配管に平行な方向の最低限の距離である。L45PMINは、継手の配管に平行な方向の長さと、継手間の直管の最低長さLMINから定まる値であり、継手の製造上の形状特性で決定されるカタログ値である。
(3−2)距離ΔD2<L45PMIN;
この場合には、45度継手を起点P1と終点P2との間に配置できないため、90度継手を複数組み合わせて、迂回路を形成する。迂回路の構成は、図19の場合と同様である。
(4)L90RMIN<距離ΔD1;
この場合も、接続すべき開口と開口との間の接続点ベクトル方向の距離によって以下のように場合分けする。
(4−1)L90PMIN<距離ΔD2;
L90PMINは、互いに対向する配管同士、平行な配管同士を90度継手で接続するために必要な配管に平行な方向の最低限の距離である。
(4−2)距離ΔD2<L90PMIN;
この場合には、90度継手を起点P1と終点P2との間に配置できないため、次に示す起点ベクトルV1と終点ベクトルV2とが平行かつ対向していない場合(P21でNOの場合)の処理と同様の処理を実行する。
以下、図15に戻り、起点ベクトルV1と終点ベクトルV2とが平行かつ対向していない場合(M21でNOの場合)、本設計支援装置は、起点ベクトルV1と終点ベクトルV2とが、対向していないが、平行であるか否かを判定する(M23)。起点ベクトルV1と終点ベクトルV2とが、対向していないが、平行である場合、本設計支援装置は、起点P1と終点P2との間に、90度継手で迂回路を形成する。図22−図24に、対向していないが、平行な起点ベクトルV1と終点ベクトルV2に対する処理例を示す。ここで、
対向していなとは、起点ベクトルV1と、終点ベクトルV2とが行き違いの関係にあるか、または、方向が同一の場合ということができる。
次に、図15に戻って、起点ベクトルV1と終点ベクトルV2とが、処理M23の条件を満たさなかった場合について説明する。これは、例えば、入れ替え機器の内部の流路が、接続口に対して斜めに形成されている場合である。この場合、本設計支援装置は、ベクトルの角度ごとの処理を実行する(M25)。ベクトルの角度ごとの処理は、以下のように、起点P1と終点P2との位置関係、および起点ベクトルV1と終点ベクトルV2のなす角度θに応じて継手と直管とを組み合わせる処理である。
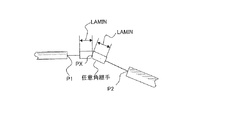
(1−1)交点PXの位置が、起点P1と終点P2との間に位置する場合には(図26参照)、任意角継手と直管で接続する(図27参照)。すなわち、交点PXに、角度θの任意角継手を配置し、始点P1と交点PXおよび交点PXと終点P2とを直管で接続する(図27参照)。ただし、始点P1と交点PXとの距離ΔDA1および交点PXと終点P2との距離ΔDA2が、任意角継手の中心から一方の端部への最小寸法LAMINより小さい場合には、(1−2)の処理による。
)。図29の例では、起点P1、直管1、90度継手、直管2、90度継手、直管3、90度継手、直管4、任意角継手、終点P2の迂回路が形成される。
(2)交点PXでのθが45度の場合;
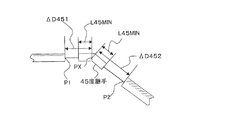
(2−1)交点PXの位置が、起点P1と終点P2との間に位置する場合には、45度継手と直管で接続する。すなわち、交点PXに、45度継手を配置し、始点P1と交点PXおよび交点PXと終点P2とを直管で接続する(図30参照)。ただし、始点P1と交点PXとの距離ΔD451および交点PXと終点P2との距離ΔD452が、45度継手の中心から一方の端部への最小寸法L45MINより小さい場合には、(2−2)の処理による。
この場合には、任意角継手として45度より大きく90度未満のものを用いることで、(2)の場合と同様の処理を実行する。図32に迂回路を形成する構成例を示す。
(4−1)交点PXの位置が、起点P1と終点P2との間に位置する場合には、90度継手と直管で接続する。すなわち、交点PXに、90度継手を配置し、始点P1と交点PXおよび交点PXと終点P2とを直管で接続する(図33参照)。ただし、始点P1と交点PXとの距離ΔD901および交点PXと終点P2との距離ΔD902が、90度継手の中心から一方の端部への最小寸法L90MINより小さい場合には、(4−2)の処理による。
(4−2)交点PXの位置が、起点P1と終点P2との間に位置しない場合(図34参照)には、90度継手の組み合わせによって迂回路を形成する。図34の例では、起点P1、直管1、90度継手、直管2、90度継手、直管3、90度継手、直管4、終点P2の迂回路が形成される。ただし、図33で、始点P1と交点PXとの距離ΔD901および交点PXと終点P2との距離ΔD902が、45度継手の中心から一方の端部への最小寸法L90MINより小さい場合も、同様に迂回路を形成する。
XYの場合にはZ軸方向)にレベルを移動する90度継手と、直管2にてZ軸方向にレベルを戻す90度継手とを設ける。
(5−1)交点PXの位置が、起点P1と終点P2との間に位置する場合には、起点ベクトルV1と、終点ベクトルV2の逆方向ベクトルのなす角θに対して、角度θを外角とする直角三角形TR1を設定する(図35参照)。直角三角形TR1は、交点PXと起点P1との間に起点ベクトルV1に直交する直線L1を設定することで、設定できる。
(条件1)起点P1から交点PX1までの距離ΔDX1が、90度継手の中心から一方の開口までの最小寸法L90MINより小さい場合;
(条件2)終点P2から交点PX2までの距離ΔDX3が、任意角継手の中心から一方の開口までの最小寸法LAMINより小さい場合;
(条件3)交点PX1と交点PX2との距離ΔDX2が、90度継手と任意角継手のそれぞれの中心から一方の開口までの最小寸法の和であるL90MIN+LAMINより小さい場合;
この場合には、90度継手と任意角継手の位置関係を入れ替える。すなわち、直角三角形としては、交点PXと終点P2との間に終点ベクトルV2に直交する直線を設定し、同様の手順を実行する。そして、同様の手順のよって、交点P1と終点P2との間に、90度継手と任意角継手を配置できるか否かを判定する。配置できる場合には、その配置にて接続する。配置できない場合には、(5−2)の手順によって迂回路を構成する。
図37に、座標軸に平行なベクトルを含む処理(図14のM4)の詳細を例示する。また、図38に、座標軸に平行なベクトルを含む処理の概念を例示する。理解を容易にするため、図38の例では、起点P1が座標軸の原点(0,0,0)にあり、起点ベクトルV1が、X軸と平行であり、一方、終点ベクトルV2は、設定されたいずれの座標軸とも平行ではない場合を示している。この場合には、本設計支援装置は、まず、一方のベクトルである起点ベクトルV1がXY平面にあるものとして、終点P2からXY平面の点P3への経路を設定する。そして、その後、XY平面上の起点P1と点P3との間で、共有平面上での二次元処理を実行する。
されることになる。なお、直管R2の両端の90度継手CR2およびCR3のいずれか、または、その両方を45度継手としてもよい。すなわち、90度継手CR2またはCR3の経路をバイパスする経路(90度継手CR2あるいはCR3の経路のなす直角に曲がる通路に対して、直角三角形の斜辺となる経路)を構成する45度継手を用いてもよい。
図39に、起点ベクトルまたは終点ベクトルがXY,YZ,ZX平面のいずれかに平行な場合の処理(図14のM6)の詳細を例示する。この処理を実行するCPU1が、単一目標平面経路設定手段31に相当する。この処理は、目標平面の選択の余地がない点を除いて、図37の処理と同様である。すなわち、起点ベクトルV1または終点ベクトルV2のいずれかが、XY,YZまたはZXに平行な面上にあるとすると、そのXY,YZまたはZXに平行な面がそのまま目標平面(ここでは、TP1)となる。
図40に、起点ベクトルV1および終点ベクトルV2がいずれもXY、YZおよびZX平面のいずれにも平行でない場合の処理を例示する。この処理を実行するCPU1が、複数目標平面経路設定手段32に相当する。また、図41に、この場合の処理の概念を示す。図41の例では、起点P1の近傍で、直管R01と90度継手CR4で接続可能な位置に目標平面TP3を設定する。その手順は、まず、起点P1から起点ベクトルV1方向に所定長さ(例えば、長さ0とし、直管を省略してもよい)の位置P10に起点ベクトルV1に垂直な平面を想定する。また、位置P10を通るXY平面に平行な目標平面TP3を想定する。そして、起点ベクトルV1に垂直な平面と目標平面TP3との交線の位置に直管R1を設定する。直管R1は、XY平面に平行な目標平面TP3上にあり、かつ、起点ベクトルV1に直交する。したがって、起点P1から起点ベクトルV1方向に直管R01だけシフトした位置P10に90度継手CR4を設けることで、起点P1と直管R1を接続できる。また、90度継手CR4に替えて、90度継手CR4の経路をバイパスする経路(90度継手CR4の経路のなす直角に曲がる通路に対して、直角三角形の斜辺となる経路)を構成する45度継手を設けてもよい。この場合に、端点(起点P1)と45度継手との間に、所定長さの直管を設けてもよい。
設計となる。
2 メモリ
4 ハードディスク駆動装置
6 入力装置
8 表示装置
10 ネットワークインターフェース
12 着脱可能記憶媒体駆動装置
20 制御部
21 表示制御手段
22 入力制御手段
23 経路記憶手段
24 接続位置算出手段
25 経路設定
26 機器接続位置記憶手段
27 設備配置記憶手段
28 属性比較手段
29 機器属性記憶手段
30 平面判定手段
31 単一目標平面経路設定手段
32 複数目標平面経路設定手段
33 第1のレベル間接続手段
34 第2のレベル間接続手段
Claims (9)
- 設備内の機器に配管が接続される接続部の位置座標と接続される配管の配置方向とを記憶する設備内機器情報記憶手段と、
前記設備にて第1の機器を第2の機器に変更する指定を受け付ける入力手段と、
前記第1の機器を第2の機器に変更したときに前記第2の機器において前記配管が接続されるべき接続部の位置座標と接続される配管の配置方向とを算出する接続位置算出手段と、
前記変更前に第1の機器の接続部に接続されていた配管末端または前記配管末端から配管をさかのぼる方向に一部を削除して形成された配管末端から、前記第2の機器の接続部までの配管の経路を設定する経路設定手段と、を備える設備の設計支援装置。 - 機器内の第1の座標系での接続部の位置座標と接続される配管の配置方向とを機器ごとに記憶する機器接続位置記憶手段と、
前記設備内の第2の座標系で機器を設置するときの設備内配置点、前記第1の座標系と前記第2の座標系との相対角度、および前記機器を前記設備内配置点に位置付けるときの基準点を記憶する設置状態記憶手段と、をさらに備え、
前記接続位置算出手段は、設備内配置点に前記第2の機器の基準点を位置付け、前記第2の座標系に対して前記第1の座標系を前記相対角度で設定したときの前記第2の機器の接続部の位置座標と接続される配管の配置方向とを算出する請求項1に記載の設備の設計支援装置。 - 機器ごとに前記接続部に接続される配管の用途を含む接続属性情報を記憶する機器属性記憶手段と、
前記第1の機器の接続部と第2の機器の接続部との間で前記接続属性情報を比較する属性比較手段と、
前記比較の結果、第1の機器の接続部と第2の機器の接続部との間で前記接続属性情報が一致しない場合に、前記第1の機器の接続部と第2の機器の接続部との間の経路設定のための対応関係の入力を促す手段と、をさらに備える請求項1または2に記載の設備の設計支援装置。 - 前記配管末端を接続部として前記第2の機器に至る配管の配置方向を示す起点ベクトルと前記第2の機器の接続部における配管の配置方向を示す終点ベクトルとが同一平面上にあるか否か、および
前記起点ベクトルと終点ベクトルとが互いに平行な異なる平面にあるか否かを判定する平行平面判定手段と、
前記起点ベクトルのある平面と前記終点ベクトルある平面との間で経路を設定する第1のレベル間接続手段と、をさらに備える請求項1から3のいずれか1項に記載の設備の設計支援装置。 - 前記起点ベクトルと前記終点ベクトルの一方が、XY平面、YZ平面、またはZX平面と平行な平面上にあるか、否かを判定するベクトル平面判定手段と、
前記起点ベクトルと前記終点ベクトルとが同一平面上および互いに平行な異なる平面上のいずれにもなく、かつ、前記起点ベクトルと前記終点ベクトルのうちの一方のベクトルが、XY平面、YZ平面、またはZX平面と平行な第1の目標平面上にあるときに、前記第1の目標平面上にない他方のベクトルの示す接続部から90度継手、45度継手、前記他方のベクトル方向の直管と90度継手との組み合わせ、または、前記他方のベクトル方向の直管と45度継手との組み合わせによって前記第1の目標平面に平行な第2の目標平面上の直管に接続する単一目標平面経路設定手段と、
前記第2の目標平面の直管から前記第1の目標平面への経路を設定する第2のレベル間
接続手段と、をさらに備える請求項4に記載の設備の設計支援装置。 - 前記起点ベクトルと前記終点ベクトルとが同一平面上および互いに平行な異なる平面上のいずれにもなく、かつ、前記起点ベクトルと前記終点ベクトルとがいずれもXY平面、YZ平面、およびZX平面のいずれとも平行でないときに、2つの座標軸に平行な第3の目標平面上の経路であって、前記起点ベクトルの示す接続部から90度継手、45度継手、前記起点ベクトル方向への直管と90度継手との組み合わせに、または、前記起点ベクトル方向への直管と45度継手との組み合わせによって接続可能な第1の直管の経路を設定するとともに、前記第3の目標平面に平行な第4の目標平面上の経路であって、前記終点ベクトルの示す接続部から90度継手、45度継手、前記終点ベクトル方向への直管と90度継手との組み合わせ、または、前記起点ベクトル方向への直管と45度継手との組み合わせによって接続可能な第2の直管の経路を設定する複数目標平面経路設定手段と、
前記第1の直管と前記第2の直管との間の経路を設定する第3のレベル間接続手段と、をさらに備える請求項4または5に記載の設備の設計支援装置。 - 前記複数目標平面経路設定手段は、
前記起点ベクトルに対して垂直な平面と前記第3の目標平面との交線方向に前記第1の直管を設定するとともに、前記起点ベクトルの示す接続部から前記第1の直管に前記90度継手、45度継手、前記起点ベクトル方向への直管と90度継手との組み合わせ、または、前記起点ベクトル方向への直管と45度継手との組み合わせによって経路を設定する手段と、
前記終点ベクトルに対して垂直な平面と前記第4の目標平面との交線方向に前記第2の直管を設定するとともに、前記終点ベクトルの示す接続部から前記第2の直管に前記90度継手、45度継手、前記終点ベクトル方向への直管と90度継手との組み合わせ、または、前記終点ベクトル方向への直管と45度継手との組み合わせによって経路を設定する手段と、を有し、
前記第3のレベル間接続手段は、前記第1の直管と前記第2の直管とを両端に90度継手または45度継手を設けた配管を含む経路で接続する手段、を有する、請求項6に記載の設備の設計支援装置。 - コンピュータが、
設備内で第1の機器を第2の機器に変更する指定を受け付ける入力ステップと、
前記設備内の機器に配管が接続される接続部の位置座標と接続される配管の配置方向とを記憶する設備内機器情報記憶手段から前記位置座標と前記配置方向とを読み出すステップと、
前記第1の機器を第2の機器に変更したときに前記第2の機器において前記配管が接続されるべき接続部の位置座標と接続される配管の配置方向とを算出する接続位置算出ステップと、
前記変更前に第1の機器の接続部に接続されていた配管末端または前記配管末端から配管をさかのぼる方向に一部を削除して形成された配管末端から、前記第2の機器の接続部までの配管の経路を設定する経路設定ステップと、を実行する設備の設計支援方法。 - コンピュータを、
設備内の機器に配管が接続される接続部の位置座標と接続される配管の配置方向とを記憶する設備内機器情報記憶手段、
前記第1の機器を第2の機器に変更する指定を受け付ける入力手段、
前記第1の機器を第2の機器に変更したときに前記第2の機器において前記配管が接続されるべき接続部の位置座標と接続される配管の配置方向とを算出する接続位置算出手段、および
前記変更前に第1の機器の接続部に接続されていた配管末端または前記配管末端から配
管をさかのぼる方向に一部を削除して形成された配管末端から、前記第2の機器の接続部までの配管の経路を設定する経路設定手段、として機能させるプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184975A JP5210744B2 (ja) | 2008-07-16 | 2008-07-16 | 設備の設計支援装置、方法、およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184975A JP5210744B2 (ja) | 2008-07-16 | 2008-07-16 | 設備の設計支援装置、方法、およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010026645A true JP2010026645A (ja) | 2010-02-04 |
| JP5210744B2 JP5210744B2 (ja) | 2013-06-12 |
Family
ID=41732445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008184975A Active JP5210744B2 (ja) | 2008-07-16 | 2008-07-16 | 設備の設計支援装置、方法、およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5210744B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013250618A (ja) * | 2012-05-30 | 2013-12-12 | Geoplan:Kk | 複数経路部材一括配置作図システム、プログラムおよび情報記憶媒体 |
| JP2013250617A (ja) * | 2012-05-30 | 2013-12-12 | Geoplan:Kk | 自動配管作図システム、プログラムおよび情報記録媒体 |
| KR102242138B1 (ko) * | 2021-01-04 | 2021-04-20 | 주식회사 탑코어시스템 | 디지털 트윈 기반의 배관 설계 모델링 장치 및 방법 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05225293A (ja) * | 1992-02-07 | 1993-09-03 | Daikin Ind Ltd | 配管図形の作成方法及びその装置 |
| JPH10154167A (ja) * | 1996-11-21 | 1998-06-09 | Takasago Thermal Eng Co Ltd | 管路のル−ト変更方法 |
| JPH10154164A (ja) * | 1996-11-21 | 1998-06-09 | Takasago Thermal Eng Co Ltd | 部材移動方法 |
| JPH1131159A (ja) * | 1997-07-14 | 1999-02-02 | Daikin Ind Ltd | 記録媒体、配管設計方法および配管設計装置 |
| JP2002007494A (ja) * | 2000-06-16 | 2002-01-11 | Babcock Hitachi Kk | 配管自動ルーティングシステム |
| JP2003316835A (ja) * | 2002-04-24 | 2003-11-07 | Kajima Corp | 建築生産情報統合システム |
| JP2008117004A (ja) * | 2006-10-31 | 2008-05-22 | Toshiba Corp | 配管部品の配置データと仕様データの流用装置およびその流用方法 |
-
2008
- 2008-07-16 JP JP2008184975A patent/JP5210744B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05225293A (ja) * | 1992-02-07 | 1993-09-03 | Daikin Ind Ltd | 配管図形の作成方法及びその装置 |
| JPH10154167A (ja) * | 1996-11-21 | 1998-06-09 | Takasago Thermal Eng Co Ltd | 管路のル−ト変更方法 |
| JPH10154164A (ja) * | 1996-11-21 | 1998-06-09 | Takasago Thermal Eng Co Ltd | 部材移動方法 |
| JPH1131159A (ja) * | 1997-07-14 | 1999-02-02 | Daikin Ind Ltd | 記録媒体、配管設計方法および配管設計装置 |
| JP2002007494A (ja) * | 2000-06-16 | 2002-01-11 | Babcock Hitachi Kk | 配管自動ルーティングシステム |
| JP2003316835A (ja) * | 2002-04-24 | 2003-11-07 | Kajima Corp | 建築生産情報統合システム |
| JP2008117004A (ja) * | 2006-10-31 | 2008-05-22 | Toshiba Corp | 配管部品の配置データと仕様データの流用装置およびその流用方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013250618A (ja) * | 2012-05-30 | 2013-12-12 | Geoplan:Kk | 複数経路部材一括配置作図システム、プログラムおよび情報記憶媒体 |
| JP2013250617A (ja) * | 2012-05-30 | 2013-12-12 | Geoplan:Kk | 自動配管作図システム、プログラムおよび情報記録媒体 |
| KR102242138B1 (ko) * | 2021-01-04 | 2021-04-20 | 주식회사 탑코어시스템 | 디지털 트윈 기반의 배관 설계 모델링 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5210744B2 (ja) | 2013-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5301921B2 (ja) | 管路の設計支援装置 | |
| US10331845B2 (en) | Fuse multiple drawings into an equipment (BIM) model | |
| JP2025530307A (ja) | エンジニアリング図面外挿およびフィーチャの自動化のためのシステムおよび方法 | |
| JP2015026377A (ja) | 3次元シーンにおいて第1のポイントと第2のポイントとを結ぶパス設計 | |
| JP5210744B2 (ja) | 設備の設計支援装置、方法、およびプログラム | |
| CN104025096A (zh) | 用于空调的安装引导系统及其使用方法 | |
| CN113366397B (zh) | 规划系统中查管道一致记录的方法、规划系统和控制程序 | |
| WO2011155539A1 (ja) | 数値解析装置、要素生成プログラム、及び数値解析方法 | |
| US20030061011A1 (en) | Computer-assisted-design of piping swing-joint intersections | |
| JP7448312B2 (ja) | 自動ルーティング方法及び装置 | |
| US20070186149A1 (en) | Size based display of piping systems | |
| JP7596073B2 (ja) | 設計システム、設計方法、プログラム、および記録媒体 | |
| JP2005108014A (ja) | 建築設備機器配置設計支援方法および建築設備機器配置設計支援システム | |
| JP5073610B2 (ja) | 機器と配管を備えた設備の設計支援装置、プログラム、および方法 | |
| US6919887B2 (en) | Navigational compass for drawing programs | |
| US12412356B2 (en) | Hanger generation in computer-aided design programs | |
| EP4428783A1 (en) | Collaborative work support program, work support program, collaborative work support system and work support system | |
| JP6408650B1 (ja) | 設計支援プログラム、及び、設計支援装置 | |
| JP2021014949A (ja) | データ処理装置、データ処理プログラム及びデータ処理方法 | |
| CN117371076A (zh) | 家装模型的控制方法、装置、电子设备及存储介质 | |
| JP5074328B2 (ja) | 設備要素を積み重ねる設備の設計支援装置、設計支援方法、およびプログラム | |
| US20240303607A1 (en) | Collaborative work support system and work support system | |
| JP2009230698A (ja) | 接続経路作成装置及び接続経路作成プログラム | |
| JPH06317506A (ja) | 演算処理装置および配管配置位置設定方法 | |
| JPH0973476A (ja) | 三次元形状情報入力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130225 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5210744 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |