本発明における表面プラズモンセンサーシステム(表面プラズモンセンサー)1の一実施形態について図1〜図12に基づいて説明すれば、以下の通りである。
〔1.表面プラズモンセンサーシステム〕
まず、本実施形態の表面プラズモンセンサーシステム1の全体構成について図1を参照して説明する。図1は、本発明における表面プラズモンセンサーシステム1の一実施形態の全体構成の概略を示す図である。
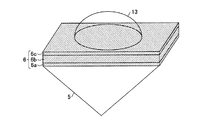
表面プラズモンセンサーシステム1は、図1に示すように、光源2、コリメートレンズ3、集光レンズ4、プリズム(誘電体基板)5、センサー膜6(以下、第1金属膜6a、誘電体膜6b、及び第2金属膜6cの総称として用いることがある)、検出レンズ7、光検出器(検出手段)8、光源駆動回路9、算出回路(入射角算出装置)10、及びモニター付き端末(入射角算出装置)11を備えている。
なお、前記構成の他、本来、A/D変換回路(アナログ/デジタル変換回路)、D/A変換回路(デジタル/アナログ変換回路)など(不図示)が必要であるが、本発明の目的とはあまり関係がないので、以下では、このような回路などに関する説明は省略する。
本実施形態の表面プラズモンセンサーシステム1は、プリズム(誘電体基板)5上に形成されており、かつ、試料(検出対象を含む液体又は気体)13(以下、簡単のため「試料」と言い、検出対象を含まない液体又は気体は「試料」とは呼ばないことにする)を接触させたセンサー膜6に対し、光源2から出射された光ビーム12をセンサー膜6の試料13が接触している面とは反対側の面(第1金属膜6aの入射側)に照射することにより、試料13の屈折率を検出するものである。
また、図1に示すように、センシングを行うためのセンサー膜6は、プリズム5に近い側から、第1金属膜6a、誘電体膜6b及び第2金属膜6cが、この順に積層された構成である。この積層構造は、簡易な構成であり、各種成膜技術によって簡単に作成することができる。よって、従来の表面プラズモンセンサーと比較して、装置の大型化やコストアップはほとんど招かない。
以下、表面プラズモンセンサーシステム1のその他の構成の詳細について説明する。
光源2は、光ビーム12を出射するものであり、半導体レーザや発光ダイオード等が好適に用いられる。光源2から出射された光ビーム12は、センサー膜6に照射されることにより、センサー膜6において以下で説明する表面プラズモンや導波光を励起する。
ここで、光ビーム12が複数の波長を含んでいる場合、各波長によって、表面プラズモンや導波光の励起条件が異なる。よって、光ビーム12が複数の波長を含んでいると、光ビーム12がセンサー膜6によって反射された反射光の入射角依存性が異なってしまうため、分析が複雑になってしまう。
したがって、光源2の波長領域は、できるだけ狭いことが望ましく、単一波長であることがより好ましい。なお、発光ダイオードなどの波長範囲が広い光源を使用する場合は、分光するなどの工夫が必要となる。
また、光源2から出射された光ビーム12の偏光方向は、プリズム5とセンサー膜6との間に形成された界面の法線と、光ビーム12の光軸を含む面とを入射面としたとき、該入射面に対して平行な偏光方向、すなわちp偏光が望ましい。
光ビーム12は、偏光方向をp偏光とすることにより、センサー膜6において表面プラズモンを励起することができる。なお、光ビーム12の偏光方向が前記入射面に対して垂直な偏光方向、すなわちs偏光の場合は、光ビーム12はセンサー膜6において表面プラズモンを励起することができない。
コリメートレンズ3は、光源2から出射された光ビーム12を平行光に変換するものである。コリメートレンズ3の焦点距離は、短ければ短いほど、光源2から出射された光ビーム12の利用効率が上がる。
集光レンズ4は、光源2から出射された光ビーム12を、一度に所定の角度範囲の入射角で、センサー膜6上の微小領域に集光するものである。コリメートレンズ3によって光源2から出射された光ビーム12を平行光に変換しておくことにより、集光レンズ4は効率よく光ビーム12をセンサー膜6上に集光することができる。
また、コリメートレンズ3を通った光が発散若しくは集束光であれば、集光レンズ4の位置を調整することにより、様々な入射角で光ビーム12をセンサー膜6へ入射させることができる。
集光レンズ4としては、全方位を集光する平凸レンズ等のレンズを用いてもよいし、一方向のみ集光するシリンドリカルレンズ等のレンズを用いてもよい。集光レンズ4として全方位を集光するレンズを用いた場合は、センサー膜6への入射角が複雑となるが、照射面積を小さくすることができる。そのため、全方位を集光するレンズを用いた表面プラズモンセンサーシステム1は、試料13の局所的な情報を得ることが可能となる。
また、集光レンズ4として一方向のみ集光するレンズを用いた場合は、集光しない方向は元のビームサイズのままであるため、センサー膜6への入射角は集光した方向にのみ依存する。そのため、一方向のみを集光するレンズを用いた表面プラズモンセンサーシステム1は、試料13の解析が容易となるが、光ビーム12の照射面積が大きくなる。
センサー膜6への入射角の角度範囲は、集光レンズ4の開口数で決まるが、暗線(極小値)が3箇所以上存在する範囲にする。なお、コリメートレンズ3及び集光レンズ4は、それぞれ一度平行光にしてから集光する構成にしているが、有限系のレンズ1つで代用してもよい。
プリズム5は、誘電体基板であり、光源2から出射された光ビーム12を通過させることにより、任意の入射角で光ビーム12をセンサー膜6に照射し、センサー膜6に表面プラズモンを励起するものである。
また、プリズム5を構成する材料としては、光源2から出射される光ビーム12の波長に応じて、光ビーム12を透過させることができる材料とすれば良く、センサー膜6に表面プラズモンを励起できる材料であれば特に限定されないが、石英やガラスやポリメチルメタクリレートなどの樹脂等の紫外、可視、赤外領域の光に対して透明で、しかも試料13より大きな屈折率を有する材質より成る光学部品が好適に用いられる。
なお、光源2から出射される光ビーム12の波長が、赤外であれば、プリズム5を構成る材料としては、シリコンを選択しても良い。
センサー膜6に表面プラズモンを効率よく励起するためには、光ビーム12を斜めにセンサー膜6に照射することが望ましい。しかしながら、光ビーム12をプリズム5ではなく平行基板を介して、斜めにセンサー膜6に入射させると、入射角が大きくなるほど、センサー膜6に到達する光量が非常に小さくなる。そのため、本実施形態の表面プラズモンセンサーシステム1では、プリズム5を用いることにより、センサー膜6に斜めに光ビーム12を照射している。
プリズム5としては、図1においては三角プリズムが用いられているが、三角型(三角柱)、台形型(台形柱)、楔形、半円柱型、及び半球型プリズム等も好適に用いられる。
例えば、プリズム5として半円柱型や半球型プリズムを用いた場合は、半円柱及び半球の中心に向かって光ビーム12を入射すると、プリズムの入射面への入射角がほぼ直角となるため、この面での反射率が小さくなり、光の利用効率が高くなる。
また、プリズム5として三角プリズムを用いた場合は、入射面での屈折により、プリズムへの入射角とセンサー膜6への入射角とが異なる角度となってしまうが、半円柱型プリズムに比べ安価であるため、一般的に利用されている。プリズム5は、上述した構成に限られず、センサー膜6に適切な角度で光ビーム12を入射させることができればよいため、他の形状でもよいし、導波路でもよい。
センサー膜6は、プリズム5の光ビーム12の入射側とは反対側の表面上に形成されている第1金属膜6aと、第1金属膜6a上に形成されている誘電体膜6bと、誘電体膜6b上に形成されている第2金属膜6cとを備えているものである。
また、センサー膜6は、光源2から照射された光ビーム12の反射光に、以下で説明する表面プラズモンや導波光に起因する暗線(反射率の極小値)を発生させるものであり、スパッタや蒸着で形成することができる。センサー膜6は、プリズム5の所定の一面上に直接形成されていても良い。プリズム5の所定の一面上とは、プリズム5が図1に示す三角プリズムの場合は三角形の底辺を含む面であり、プリズム5が半円柱型又は半球型プリズムの場合は半円柱又は半球の中心を含む面であり、プリズム5によって光ビーム12を斜めにセンサー膜6に入射させることが可能な面である。
また、センサー膜6をプリズム5と同程度の屈折率を有した誘電体基板上に形成し、該誘電体基板のセンサー膜6が形成されている側とは反対側の面を、プリズム5の所定の一面上にインデックスマッチング剤を挟んで載せてもよい。
該インデックスマッチング剤としては、市販されている液体やジェル等を用いてもよいし、UV硬化樹脂を用いてもよい。また、前記誘電体基板又はプリズム5との密着性や親和性向上のために、前記誘電体基板又はプリズム5とセンサー膜6との間に下地層を設けてもよい。
また、センサー膜6の表面(第2金属膜6cにおける検出対象を含む液体又は気体を接触させる接触面)上ににさらに特定の分子(物質)を吸着できる吸着層を設け、試料13中の特定の分子を検出する構成としてもよい。
これにより、第2金属膜6cの表面の屈折率変化は、ほぼ吸着対象の物質に由来すると考えられることから、第2金属膜6cの表面の屈折率変化から、吸着対象の物質の濃度変化を検出することができる。
なお、試料13には、検出対象以外の物質が混入している場合、表面プラズモンセンサーシステム1によって試料13の屈折率を検出すると、前記検出対象及び検出対象以外の物質が含まれた屈折率が検出されてしまう。そこで、センサー膜6に前記吸着層を設けることにより、検出対象のみを吸着させることができ、該検出対象のみの屈折率を検出することが可能となる。
また、センサー膜6が形成された前記誘電体基板をプリズム5に対して着脱可能にしておくことにより、検出対象に応じてセンサー膜6やセンサー膜6表面の吸着層を誘電体基板ごと取り替えることが可能となる。これにより、1つの装置を用いて、多種の試料13の検出を行うことが可能となる。すなわち、他の材料から構成されており、かつ、他の組み合わせの材料・膜厚・吸着層を有するセンサー膜6が形成された誘電体基板と取り替えることにより、表面プラズモンセンサーシステム1の感度や測定範囲、測定対象等を変えることができる。センサー膜6が、プリズム5の所定の一面上に直接形成されている場合には、プリズム5ごと、センサー膜6を交換すれば、同様に、表面プラズモンセンサーシステム1の感度や測定範囲、測定対象等を変えることができる。
センサー膜6は、第1金属膜6a、誘電体膜6b、及び第2金属膜6cの積層構造からなるが、これらのうち、第1金属膜6a及び第2金属膜6cを構成する材料としては、表面プラズモンを励起可能な金属又は合金であればよく、例えば、銀、銅、アルミニウム、白金、及び金、並びにクロム、チタン等が好適に用いられる。第1金属膜6a及び第2金属膜6cは、酸化などの経時変化の起こらない、安定した金属から構成されていることが望ましい。
また、第1金属膜6a及び第2金属膜6cの厚みは、紫外、可視、赤外領域の光線を透過できる程度であり、一般的には、約100nm以下であれば、これらの光線を透過させることが可能である。第1金属膜6a及び第2金属膜6cは厚さが均一でかつ表面が平坦であり、なおかつ下層との密着性が良いことが望ましい。このような第1金属膜6a及び第2金属膜6cは真空蒸着法、スパッタリング法などで形成されることが多いが、本実施形態では特定の成膜方法に限定されるものではない。
上述した金属のうち、金は、非常に安定した金属であり、錆びないために耐久性が高く、さらに、表面プラズモンを効率よく励起する。そのため、表面プラズモンセンサーシステム1の金属膜として、金(Au)は最も好適に用いられる。第1金属膜6a及び/又は第2金属膜6cとして金を用いることにより、試料13によって化学反応を起こさず、高い分解能で屈折率を検出することができるとともに、金属膜の酸化による経時劣化を防ぐことができる。
なお、金には不純物が含まれていてもよいが、一般に不純物濃度が高くなると、前記極小値の半値幅が広くなり、検出分解能を下げることになるため、金の純度は高い方が好ましい。
また、第1金属膜6a及び第2金属膜6cの材料は異なる材料で構成されていても良い。前記構成によれば、以下で説明する低角側極小値、中間極小値、及び高角側極小値(暗線)の半値幅が狭くなり、検出分解能及び補正精度を高くすることができる。
また、第1金属膜6a及び/又は第2金属膜6cが金から構成されている場合、第1金属膜6a及び/又は第2金属膜6c上に表面プラズモンを励起するためには、光源2から出射される光ビーム12の波長が重要である。
金から構成された第1金属膜6a及び/又は第2金属膜6c上に表面プラズモンを励起するためには、約600nm以上の波長の光ビーム12を第1金属膜6a及び第2金属膜6cに照射することが望ましい。
光源2から約600nm以上の波長の光ビーム12を金から構成された第1金属膜6a及び第2金属膜6cに照射することにより、表面プラズモンの励起効率が高まり、高い分解能で試料13の屈折率を検出することができる。なお、第1金属膜6a、及び/又は第2金属膜6cが金以外の酸化しやすい材料から構成されている場合、上に誘電体による保護膜を設けることで、酸化を防いでもよい。第1金属膜6a、及び第2金属膜6cの膜厚は、通常、10nm〜90nm程度である。
誘電体膜6bの材料は、屈折率が、プリズム5より小さく、試料13より大きければよい。具体的には、SiO2やMgF2などの紫外、可視、赤外領域の光線に対して透明な材質より成る無機物質の薄膜が挙げられる。この膜厚は、紫外、可視、赤外領域の光線の波長の半分から数倍程度であり、通常は約100nmから数1000nmであるが、本実施形態の表面プラズモンセンサーシステム1では、100nm〜900nm程度が好ましい。
誘電体薄膜6bは厚さが均一でかつ表面が平坦であり、なおかつ下層との密着性が良いことが望ましい。このような誘電体薄膜6bは真空蒸着法、スパッタリング法、化学蒸着法、ゾルゲル法などで形成できる。なお、本実施形態では特定の成膜方法に限定されるものではない。
前記構成によれば、光源2から出射される光ビーム12を、センサー膜6に入射させることによって、生じる反射光は、光源2から出射される光ビームのうちプリズム5を透過した光ビーム12が、所定範囲の入射角で、プリズム5及び第1金属膜6a間、第1金属膜6a及び誘電体膜6b間、誘電体膜6b及び第2金属膜6c間、並びに、第2金属膜6cと試料13との間に形成されるすべての界面による多重反射で生じる。
なお、多重反射が生じているか否かは、以下で説明するように、反射光に3つ以上の極小値が存在するか否かによって調べることが可能である。
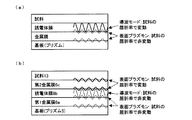
ここで、図8(a)及び図8(b)に基づき、従来の表面プラズモンセンサーと、本実施形態の表面プラズモンセンサーシステム1とに生じる素励起の違いについて説明する。
図8(a)は、前記従来の表面プラズモンセンサーに生じる素励起を示す図であり、図8(b)は、表面プラズモンセンサーシステム1に生じる素励起を示す図である。
図8(a)に示すように、特許文献2に記載された従来の表面プラズモンセンサーは、基板(プリズム)、金属膜、及び誘電体膜からなる構成である。このとき、金属膜に光ビームが照射されると、特定の入射角で表面プラズモンが励起されると共に、別の特定の入射角で誘電体膜を導波路とする導波モードが励起される。
ここで、表面プラズモンの励起について説明する。表面プラズモンは、金属膜が1つの場合、その上面・下面の2つの界面で励起され、それらが互いに結合した状態となっている。
一方、金属膜が複数の場合、複数の金属膜の上面・下面の各界面で励起され、それらが互いに結合した状態になっている。
ここで、試料に近い導波モードは、試料の屈折率変化の影響を受けて対応する暗線(極小値)の位置(入射角)が変動する。また、試料から離れた金属膜に生じる表面プラズモンは、試料の屈折率変化の影響を受けても、対応する暗線の位置が、ほとんど変動しない。
ここで、「暗線の位置」としているのは、例えば、入射した光ビームの位置を検出することが可能なエリアセンサ(例えば、光検出器)などの「受光面上における位置」が、光ビームの基板と金属膜との界面への入射角に対応するものであり、受光面上における位置を検出することは、界面への入射角度を検出することと等しいからである。
一方、表面プラズモンセンサーシステム1は、プリズム5、第1金属膜6a(図では、金属膜6aと省略)、誘電体膜6b及び第2金属膜6c(図では、金属膜6cと省略)を備えており、図8(b)に示すように、誘電体膜6b内には、導波モードが励起され、第1金属膜6a及び第2金属膜6cの上面・下面の各界面にそれぞれ、表面プラズモンが生じる。これらの表面プラズモンは互いに結合し、結合の仕方で互いに異なるモードとなる。
そうすると、各モードの強度分布は異なり、第2金属膜6cのいずれかの界面で強度分布が強くなる表面プラズモンモードは、試料(試料13)の屈折率変化の影響を受けやすいと考えられるが、導波モード及び第1金属膜6aのいずれかの界面で強度分布が強くなる表面プラズモンモードは、試料の屈折率変化の影響を受けにくいものと考えられる。
但し、本発明の表面プラズモンセンサーでは、このような状況の下で、さらに、導波モード及び第1金属膜6aのいずれかの界面で強度分布が強くなる表面プラズモンモードによる暗線を検出する検出器8とを備えており、この結果、検出器8が検出した前記反射光の、前記所定範囲の入射角に対応する反射率に、3つ以上の極小値が存在するように構成されている。
前記3つ以上の極小値を識別可能に生じさせるためには、まず、その前提として第1金属膜6a及び第2金属膜6cの両方に表面プラズモンを生じさせる必要がある。また、この2つの表面プラズモンを生じさせるためには、「誘電体膜6bの屈折率は、プリズム5の屈折率より小さく、かつ第2金属膜6cに接触させる試料13の屈折率より大きい」ことが必要である。
また、前記2つの表面プラズモンは、誘電体膜6bの膜厚がある程度小さくなると、互いに影響を及ぼし合い、結合し、いくつかの表面プラズモンモード(結合モード)となる。この結合モードのそれぞれは、一般的には、エネルギーが低い状態とエネルギーが高い状態とに分離する。
そこで、前記3つ以上の極小値を識別可能に生じさせるには、第1金属膜6a及び第2金属膜6cのそれぞれに生じる表面プラズモンを結合させて前記結合モードを生じさせる必要がある。また、この結合モードを生じさせるためには、「誘電体膜6bの膜厚は、光ビーム12の波長より短い」ことが好ましい。
すなわち、「前記所定範囲の入射角に対応する反射率に、3つ以上の極小値が存在している」という条件は、「誘電体膜6bの屈折率は、プリズム5の屈折率より小さく、かつ第2金属膜6cに接触させる試料13の屈折率より大きい」及び「誘電体膜6bの膜厚は、光ビーム12の波長より短い」という2つの条件に置き換えることができる。
ただし、「誘電体膜6bの膜厚は、光ビーム12の波長より短い」については、好ましいという意義での条件であり、誘電体膜6bの膜厚が光ビーム12の波長よりも多少大きくても、充分近ければ良い。
一方、表面プラズモンの結合モードのうち、試料13の屈折率変化の影響を受けやすいモードは、試料13の屈折率変化の影響を受けて対応する暗線の位置が変動する。
前記構成によれば、表面プラズモンセンサーシステム1では、前記3つ以上の極小値のうち、屈折率変化によって位置が変動する少なくとも1つの極小値を屈折率測定に用い、残りの変動しない2つの極小値をセンサーチップ交換による測定誤差の補正に用いることができる。
例えば、センサーチップが交換前の規定位置にある場合に、変動しない2つの暗線が発生する位置を予め記録しておき、センサーチップ交換時に、変動しない2つの暗線が、予め記録されている前記規定位置で発生するように、センサーチップの傾き及び高さを調節することにより、測定誤差を補正することができる。
このとき、2つの暗線の間隔が異なる場合は傾きを、間隔は等しいが位置が異なる場合は、高さを調節すればよい。また、2つの暗線の間隔及び位置が異なる場合には、傾き及び高さの両方を調整することになる。
なお、ここでの補正は、センサーチップの傾き及び高さ自体を調整するものであるが、以下で説明するように、センサーチップの傾き及び高さの変化に応じて測定値(又は入射角の値)自体を算出する方法も考えられる。なお、この測定値(又は入射角の値)自体を算出する方法については、以下で、詳細に説明する。
また、表面プラズモンの結合モードのうち、試料13の屈折率変化の影響を受けやすいモードに対応する暗線は、導波光を励起することにより現れる暗線(導波モード)より幅が狭いので、検出に用いる場合には検出分解能を高くすることができ、測定誤差の補正に用いる場合には補正精度を高くすることができる。
検出レンズ7は、センサー膜6から反射した光ビーム12を、光検出器8へ平行化して入射させるためのものである。検出レンズ7は、第1金属膜6a及び第2金属膜6cからの反射光を平行光にしてから光検出器8に入射する構成であるが、本実施形態の表面プラズモンセンサーシステム1ではこれに限られず、さらにこれを集光して光検出器8に入射してもかまわない。
光検出器8は、センサー膜6から反射した反射光の強度を検出するものである。光検出器8としては、CCD(charge-coupled device)若しくはCMOS(complementary metal-oxide semiconductor)イメージや、又はアレイ状検出器を用いることにより、反射光を一度に取り込むことが好ましい。特に、光検出器8としてCCD又はCMOSを用いれば、光ビーム12を撮像した画像領域のうち、どの領域を測定に用いるかを選択することができる。
光源駆動回路9は、光源2を駆動するものであり、図示しない電源から電圧の供給を受けて光源2に電流を流すことにより、光源2を駆動する。なお、光源2の破壊を防ぐために、光源駆動回路9には光源2に流す電流値に上限値を設けておくことが好ましい。
算出回路10は、3箇所以上の暗線から、センサーチップの位置(高さ)や傾きの誤差を補正するとともに、試料13の屈折率や濃度を算出するための回路であり、LSI(large-scale integration)やIC(integrated circuit)などの半導体チップ、又は、これらを複合化したコンピュータなどを用いればよい。具体的な算出方法は、後で述べる。
モニター付き端末11は、測定された反射率等の種々の結果を表示するものである。モニター付き端末11のモニターとしては、例えば、CRT(cathode-ray tube)や液晶ディスプレイ等が好適に用いられる。
表面プラズモンセンサーシステム1のセンサー膜6に対する試料13の接触方法を、図2及び図3を用いて説明する。本実施形態の表面プラズモンセンサーシステム1は、試料13の屈折率の検出を行うために、試料13をセンサー膜6の表面に接触させる。例えば、試料13として液体を用いた場合には、図2に示すように、センサー膜6のプリズム5が設けられている側とは反対側の面に液滴として接触させる。
また、例えば、試料13として液体又は気体を用いた場合には、図3に示すように、センサー膜6表面に設けられたマイクロ流路14に液体又は気体を流して接触させる。試料13をセンサー膜6表面に接触させる方法としては、上述した方法に限られず、試料13がセンサー膜6表面に接触可能な構成であれば構わない。
以上より、簡易な構成で、センサーチップ交換時のセンサーチップの傾き及び高さの変化による測定誤差を補正することができる表面プラズモンセンサーシステム1などを提供することができる。
〔2.表面プラズモンセンサーシステムの測定誤差を補正する原理〕
次に、図1、図4から図6までに基づき、3箇所以上の暗線を発生する表面プラズモンセンサーシステム1において、センサーチップ交換による測定誤差を補正する原理について、2つの実施例を用いて説明する。
なお、〔2.表面プラズモンセンサーシステムの測定誤差を補正する原理〕において説明すること以外の構成は、〔1.表面プラズモンセンサーシステム〕と同じである。また、説明の便宜上、〔1.表面プラズモンセンサーシステム〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
(第1実施例)
まず、第1実施例として、第1金属膜6a及び第2金属膜6cの材料が同じである場合について、図4を参照して説明する。
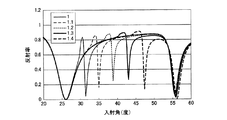
図4は、表面プラズモンセンサーシステム1で、いくつかの試料13の屈折率に対する、(プリズム5からセンサー膜6への)入射角と反射率との関係を示す図(グラフ)である。ここで、光源2の波長として780nmを、プリズム5の屈折率として2.0を、第1金属膜6a、第2金属膜6cの材料をAu、誘電体膜6bの材料をSiO2としている。
なお、プリズム5は、図1に示す三角柱プリズムを使用しており、三角形の断面の頂角は、90度である。
第1金属膜6aは30nm、誘電体膜6bは250nm、第2金属膜6cは40nmの膜厚とした。
図4より明らかなように、本実施例の場合、暗線が3箇所発生しており、これらの暗線のうち、試料13の屈折率変化に反応しているのは、中央の暗線(中間極小値)のみであり、最低角(26.2°)の暗線(最小角極小値)と最高角(56°)の暗線(最大角極小値)は、ほとんどシフトしていない。つまり、これらの試料13の屈折率に影響を受けない暗線から、測定している光の正確な角度を知ることができる。したがって、センサーチップ交換によるセンサーチップの傾きやプリズムとの距離が変わっても、屈折率に影響を受けない暗線の位置(角度)を基に、中央の暗線が発生している角度がわかり、これより試料13の屈折率や濃度がわかる。
(第2実施例)
次に、第2実施例として、第1金属膜6a及び第2金属膜6cの材料が異なる場合について、図5を参照して説明する。
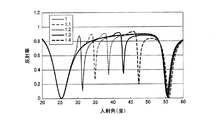
図5は、別の表面プラズモンセンサーシステム1で、いくつかの試料13の屈折率に対する、(プリズム5からセンサー膜6への)入射角と反射率との関係を示す図(グラフ)である。ここで、光源2の波長として780nmを、プリズム5の屈折率として2.0を、第1金属膜6aの材料をAg、第2金属膜6cの材料をAu、誘電体膜6bの材料をSiO2としている。第1金属膜6aは30nm、誘電体膜6bは250nm、第2金属膜6cは40nmの膜厚とした。なお、プリズム5は、第1実施例と同じのものである。
図5より明らかなように、本実施例の場合、暗線が3箇所発生しており、これらの暗線のうち、試料13の屈折率変化に反応しているのは、中央の暗線(中間極小値)のみであり、最低角(25.8°)の暗線(最小角極小値)と最高角(55.8°)の暗線(最大角極小値)は、ほとんどシフトしていない。つまり、これらの試料13の屈折率に影響を受けない暗線から、測定している光の正確な角度を知ることができる。したがって、センサーチップ交換によるセンサーチップの傾きやプリズムとの距離が変わっても、屈折率に影響を受けない暗線の位置(角度)を基に、中央の暗線が発生している角度がわかり、これより試料13の屈折率や濃度がわかる。
図5の結果より、第1金属膜6a及び第2金属膜6cの金属材料は、異なる材料からなってもよく、表面プラズモンを励起すれば、他の組み合わせでもよい。第1金属膜6a及び第2金属膜6cの金属材料を異なる材料にすることにより、暗線の幅を狭くすることができていることがわかる。
図4及び図5では、試料13の屈折率変化を気体である1.0から液体である1.4と広い範囲での結果を示している。実際には、1つのセンサーチップでは、気体又は液体のいずれかを測定するため、試料13の屈折率変化が1.0〜1.2、もしくは1.3〜1.4のみに適切な動作をすればよい。
試料13が液体であれば、図4及び図5いずれの場合でも、誘電体膜6bの膜厚を300nmにすることにより、最高角にあらわれている暗線の試料13の屈折率変化による影響を、より小さくすることができる。
また、図4及び図5では、センサー膜6の表面にさらに特定の分子を吸着できる吸着層を設けた構成とはしていないが、通常、吸着層は数オングストロームと非常に薄いため、これらの計算結果に影響は与えない。
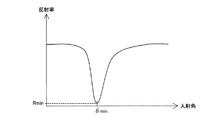
図6は、従来の表面プラズモンセンサーで、いくつかの試料13の屈折率に対する、入射角と反射率との関係を示す図(グラフ)である。ここで、光源2の波長として780nmを、プリズム5の屈折率として2.0を、金属膜の材料をAu(50nm)とした。これより、本実施形態の表面プラズモンセンサーシステム1は、感度(屈折率変化に対するθminの変化率)や、分解能(暗線の半値幅)は、従来の表面プラズモンセンサーと同等であることがわかる。
次に、3箇所以上の暗線を適切に発生させるためのセンサー膜6の構成について説明する。
センサー膜6の誘電体膜6bの屈折率が、プリズム5より小さく、かつ試料より大きければ、第1金属膜6aと第2金属膜6cに表面プラズモンが励起される。誘電体膜6bは、これらを結合する層となっている。すなわち、誘電体膜6bの膜厚が波長より十分長ければ、第1金属膜6aの表面プラズモンと第2金属膜6cの表面プラズモンは独立に存在するが、誘電体膜6bの膜厚が波長に近くなると、両者は互いに影響を及ぼし合い、結合した表面プラズモンとなる。この結合した表面プラズモンにはいくつかのモードが存在するため、複数の暗線が現れる。
ただし、プリズム5と試料13との屈折率差による臨界角は、真ん中の暗線より低角側に、存在している。つまり、最も低角側の暗線(最小角極小値)は、全反射領域ではない角度に現れている。よって、これは表面プラズモンに起因する暗線ではなく、導波光に起因する暗線である。
これらの3箇所の暗線に起因するモードは、それぞれセンサー膜6及び試料13内部における強度分布が異なるため、試料13の屈折率の影響が異なるのである。
これらの3箇所の暗線は、それぞれが十分細くかつ反射率ができるだけ0に近い方が、表面プラズモンセンサーシステム1の分解能が高くなる。
また、発生する角度が互いに重ならないことも重要である。これらは、第1金属膜6a、誘電体膜6b、第2金属膜6cの膜厚により調整することができ、第1金属膜6a、第2金属膜6cは10nm〜90nm、誘電体膜6bは100nm〜900nmにするのが好ましい。
〔3.入射角算出装置〕
次に、図1、図9から図12までに基づき、本発明の入射角算出装置の一実施形態について説明する。
なお、〔3.入射角算出装置〕において説明すること以外の構成は、〔1.表面プラズモンセンサーシステム〕及び〔2.表面プラズモンセンサーシステムの測定誤差を補正する原理〕と同じである。また、説明の便宜上、〔1.表面プラズモンセンサーシステム〕及び〔2.表面プラズモンセンサーシステムの測定誤差を補正する原理〕の図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
本実施形態の入射角算出装置は、検出レンズ(入射角算出装置)7、光検出器(入射角算出装置)8、算出回路(入射角算出装置)10及びモニター付き端末(入射角算出装置)11からなる構成である。なお、検出レンズ7及び/又は光検出器8は、表面プラズモンセンサーの一部品であっても良い。
検出レンズ7は、センサー膜6から反射した光ビーム12を、光検出器8へ平行化して入射させるためのものである。検出レンズ7は、第1金属膜6a及び第2金属膜6cからの反射光を平行光にしてから光検出器8に入射する構成であるが、本実施形態ではこれに限られず、さらにこれを集光して光検出器8に入射してもかまわない。
光検出器8は、センサー膜6から反射した反射光の強度を検出するものである。光検出器8としては、CCD(charge-coupled device)若しくはCMOS(complementary metal-oxide semiconductor)イメージや、又はアレイ状検出器を用いることにより、反射光を一度に取り込むことが好ましい。特に、光検出器8としてCCD又はCMOSを用いれば、光ビーム12を撮像した画像領域のうち、どの領域を測定に用いるかを選択することができる。
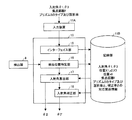
次に、図9に基づき、算出回路10の各構成の詳細について説明する。
図9に示すように、算出回路10は、インターフェイス部15、検出位置特定部16、、入射角算出部17、及び入射角補正部18からなる構成である。
また、モニター付き端末11は、入力装置11A及び記録部11B、並びに、図示しないCPU(central processing unit)を備えている。
なお、図1では、算出回路10及びモニター付き端末11は、別の装置としているが、これらを単一の装置としても良い。
なお、以下では、簡単のため、算出回路10、モニター付き端末11、及び入力装置11Aは、単一の装置であるとして説明する(すなわち、算出回路10の処理は、モニター付き端末11の内部処理であるとして説明する)。また、厳密には、モニター付き端末11の制御部が、算出回路10の各構成の動作を制御しているが、煩雑となるので、算出回路10の各構成と、モニター付き端末11の制御部のやり取りについては、説明を省略する。
入力装置11Aは、インターフェイス部15を介して、ユーザが、集光レンズ4の開口数等に基づいて設定した入射角(最小入射角)θ1、入射角(最大入射角)θ3、検出レンズ7の焦点距離f、並びにプリズム5のタイプ(形状)及び屈折率等の各種データなどを記録部11Bに一時記録させるためのものである。
なお、本実施形態では、ユーザが、入射角θ1、入射角θ3などの設定データを予め入力する形態について説明しているが、このような形態に限られず、光源2、コリメートレンズ3、集光レンズ4、プリズム(誘電体基板)5、検出レンズ7、光検出器(検出手段)8等の状態を検出する検出装置を別に設け、この検出装置の検出結果に基づいて、入射角θ1、入射角θ3などの設定データが自動的に記録部11Bに一時記録される構成としても良い。
記録部11Bは、ユーザが設定した入射角(最小入射角)θ1、入射角(最大入射角)θ3、や検出位置特定部16が算出した、位置x0、位置x1、位置x2、位置x3、並びに、プリズム5のタイプ(形状)及び屈折率が一時記録されたり、あらかじめ「プリズム5のタイプ及び屈折率と補正率との関係を示す対応関係情報」が記録されたりするメモリである。なお、記録部11Bは、ROM(read only memory)及び/又はRAM(random access memory)で構成することができる。
検出位置特定部16は、光検出器8からの受光信号を受け取り、以下で説明する位置x0、位置x1、位置x2、位置x3を特定し、デジタルデータに変換して、記録部11Bに一時記録させるものである。
入射角算出部17は、検出位置特定部16が特定した位置x0、位置x1、位置x2、位置x3を読み出すと共に、記録部11Bに予め記録されている焦点距離fを読み出し、
以下で説明するように、所定の計算式に従って、入射角θ1及び入射角θ3から入射角(中間入射角)θ2を算出するようになっている。
入射角補正部18は、記録部11Bに一時記録されたプリズム5のタイプ(形状)及び屈折率を読み出し、「プリズム5のタイプ及び屈折率と補正率との対応関係情報(以下、単に、「テーブル情報」という)」を参照して、補正率を決定し、入射角算出部17が算出した入射角θ2を補正して入射角θ2’を算出するものである。
なお、検出対象の屈折率・濃度は、この入射角θ2又は入射角θ2’の値から求める。
算出回路10は、表面プラズモンセンサーから取得した3つ以上の極小値のうち、低角側極小値に対応する最小入射角(入射角θ1)と、高角側極小値に対応する最大入射角(入射角θ3)とを参照して、前記低角側極小値及び前記高角側極小値間に存在する少なくとも1つの中間極小値に対応する中間入射角(入射角θ2)を算出するものである。
なお、ここでは、センサーチップの交換による測定誤差の補正を、センサーチップ自体の高さ・傾きを調整するのではなく、算出回路10によって、センサーチップの高さ・傾きの変化に応じて、数値計算で、測定誤差の補正を実行する場合を想定している。
以上によれば、光検出器8によって、センサーチップの高さ・傾きが変わっても、試料13の屈折率の影響を受けにくい表面プラズモンの結合モードに対応する低角側極小値における最も入射角が小さい最小入射角(入射角θ1)と、試料13の屈折率の影響を受けにくい導波モードに対応する高角側極小値における最も入射角の大きい最大入射角(入射角θ3)を特定する(又は検出する)ことができる。
なお、最も屈折率差が大きい、プリズム5と試料13との屈折率差に基づく臨界角は、入射角θ1より高角側に、存在する。つまり、低角側極小値は、第1界面に対する全反射領域ではない角度に現れている。よって、これは表面プラズモンの結合モードに起因する暗線ではなく、導波光(導波モード)に起因する暗線であると考えられる。
また、これにより、高角側極小値及び中間極小値は、表面プラズモンの結合モードに起因する暗線であることが導かれる。
さらに、高角側極小値は、試料の屈折率変化の影響を受けにくく、中間極小値は、屈折率変化の影響を受けやすい傾向を示す。
よって、この特定された入射角θ1及び入射角θ3とを参照して、前記低角側極小値及び前記高角側極小値間に存在する少なくとも1つの中間極小値に対応する入射角θ2を算出することができる。なお、この入射角θ2自体を算出する具体的方法については、以下で、詳細に説明する。
また、上述したセンサーチップの傾き及び高さ自体を調整する例では、センサーチップが交換前の規定の位置にある場合に、入射角θ1及び入射角θ3に対応する変動しない2つの低角側極小値及び高角側極小値が発生する位置を予め記録しておき、センサーチップ交換時に、変動しない2つの低角側極小値及び高角側極小値が、予め記録されている前記規定の位置で発生するように、センサーチップの傾き及び高さを調節するようにすることにより、測定誤差を補正することができる。
このとき、2つの低角側極小値及び高角側極小値の間隔が異なる場合は傾きを、間隔は等しいが位置が異なる場合は、高さを調節すればよい。また、2つの低角側極小値及び高角側極小値暗線の間隔及び位置が異なる場合には、傾き及び高さの両方を調整することになる。
以上により、センサーチップ交換による、センサーチップの高さ及び傾きの変化による誤差を補正して、試料13の屈折率や濃度を検出することができる。
次に、図10から図12までのフローチャートに基づき、算出回路10による、補正方法及び試料13の屈折率や濃度の具体的な算出方法について説明する。
(第1計算例)
最も簡単な計算の例としては、最低角の暗線(低角側極小値)と最高角の暗線(高角側極小値)が発生している間の光検出器8の受光面上の位置を、均等に角度に換算すればよい。
これは、位置x1、位置x2、及び位置x3のそれぞれの間隔の変化は、センサーチップの高さの変化に対応し、位置x1、位置x2、及び位置x3のそれぞれの間隔が変化しない場合、位置の変化は、センサーチップの傾きの変化に対応することに基づいている。
すなわち、位置x1及び位置x3を結ぶ線分の内分点を位置x2と考えたときの内分比自体は、センサーチップの高さ及び傾きが変化してもほとんど変化しないと考えることができる点を利用する算出方法である。
第1計算例では、算出回路10は、最小入射角をθ1、中間入射角をθ2、及び最大入射角をθ3とし、これらに対応する反射光が検出される光検出器8の受光面上の位置をそれぞれ位置x1、位置x2、及び位置x3とするとき、
(x2-x1)/(x3-x1)=(θ2-θ1)/(θ3-θ1)・・・数式(1)
の関係を用いて、入射角θ1及び入射角θ3から入射角θ2を算出する。
具体的には、図10のステップS1(以下、単に「S1」などと記載する)で、ユーザーが入力装置11Aを使用して入射角θ1及び入射角θ3を入力すると、インターフェイス部15が入射角θ1及び入射角θ3をデジタルデータに変換して記録部11Bに一時記録させる。また、インターフェイス部15は、前記一時記録が終了すると、検出位置特定部16に「動作命令」を発してS2に進む。
S2では、検出位置特定部16が、インターフェイス部15から「動作命令」を受けて、光検出器8の検出結果(すべての暗線の位置)を取得してS3に進む。
S3では、検出位置特定部16が、入射角θ1に対応する暗線(低角側極小値)、屈折率測定用の暗線(中間極小値)、入射角θ3に対応する暗線(高角側極小値)を特定して、位置x1、位置x2、及び位置x3を得ると共に、取得した、位置x1、位置x2、及び位置x3をデジタルデータに変換し、記録部11Bに一時記録させる。
また、検出位置特定部16は、記録部11Bに一時記録が終了すると、入射角算出部17に「動作命令」を発してS4に進む。
S4では、入射角算出部17が、検出位置特定部16からの「動作命令」を受けると、記録部11Bから、入射角θ1及び入射角θ3、並びに、位置x1、位置x2、及び位置x3を読み出して、数式(1)に基づき、入射角θ2を算出し、S5に進む。
S5では、図示しない屈折率・濃度換算部が、予め記録部11Bに記録した「入射角と屈折率・濃度との対応関係を示す換算テーブル(又は換算式、換算表など)」を参照して、入射角θ2から、試料13の屈折率・濃度を算出して「END」となる。
よって、上記の単純な算出式により、センサーチップ交換による、センサーチップの高さ・傾きの変化による誤差を補正して、入射角θ2を算出できるので、より正確な試料13の屈折率や濃度を検出することができる。
(第2計算例)
次に、図11のフローチャートに基づき、より正確な計算例について説明する。
第2計算例では、算出回路10は、最小入射角をθ1、中間入射角をθ2、及び最大入射角をθ3とし、これらに対応する反射光が検出される光検出器8の受光面上の位置をそれぞれ位置x1、位置x2、及び位置x3とし、第1界面及び前記第2界面から生じた反射光のうち、光検出器8の受光面へ垂直に入射する光ビームの受光面上での位置をx0とし、受光面とプリズム5との間に配置される検出レンズ7の焦点距離をfとし、並びに添え字をi=1,2,3とするとき、
tan(θi)=(xi-x0)/f・・・数式(2)
の関係を用いて、入射角θ1及び入射角θ3から入射角θ2を算出する。
具体的には、図11のステップS11(以下、単に「S11」などと記載する)で、ユーザーが入力装置11Aを使用して、光検出器8の受光面へ垂直に入射する光ビームの受光面上での位置をx0、検出レンズ7の焦点距離をfを入力すると、インターフェイス部15がこれらをデジタルデータに変換して記録部11Bに一時記録させて、S12に進む。
S12では、引き続きユーザーが入力装置11Aを使用して、入射角θ1及び入射角θ3を入力すると、インターフェイス部15が入射角θ1及び入射角θ3をデジタルデータに変換して記録部11Bに一時記録させる。また、インターフェイス部15は、前記一時記録が終了すると、検出位置特定部16に「動作命令」を発してS13に進む。
S13では、検出位置特定部16が、インターフェイス部15から「動作命令」を受けて、光検出器8の検出結果(すべての暗線の位置)を取得してS14に進む。
S14では、検出位置特定部16が、入射角θ1に対応する暗線(低角側極小値)、屈折率測定用の暗線(中間極小値)、入射角θ3に対応する暗線(高角側極小値)を特定して、位置x1、位置x2、及び位置x3を得ると共に、取得した、位置x1、位置x2、及び位置x3をデジタルデータに変換し、記録部11Bに一時記録させる。
また、検出位置特定部16は、記録部11Bに一時記録が終了すると、入射角算出部17に「動作命令」を発してS15に進む。
S15では、入射角算出部17が、検出位置特定部16からの「動作命令」を受けると、記録部11Bから、入射角θ1及び入射角θ3、位置x0、位置x1、位置x2、及び位置x3並びに焦点距離fを読み出して、数式(2)に基づき、入射角θ2を算出し、S16に進む。
S16では、図示しない屈折率・濃度換算部が、予め記録部11Bに記録した「入射角と屈折率・濃度との対応関係を示す換算テーブル(又は換算式、換算表など)」を参照して、入射角θ2から、試料13の屈折率・濃度を算出して「END」となる。
前記構成によれば、センサーチップ交換による、センサーチップの高さ・傾きの変化による誤差を補正して、より正確な試料の屈折率や濃度を検出することができる。
(第3計算例)
次に、図12の基づき、プリズム5のタイプ(形状)及び屈折率の違いによる「誘電体基板の出射面での屈折」の違いを考慮した、さらに正確な計算例について説明する。
すなわち第2計算例では、算出回路10は、図9に示すように、プリズム5のタイプ及び屈折率を考慮して入射角θ2の値を補正する入射角補正部18を備えている。
例えば、「プリズム5のタイプ(形状)及び屈折率と入射角θ2の補正率との対応関係を示すテーブル情報」などをあらかじめ計算して記録部11Bに記憶させておき、このテーブル情報を参照して、「入射角θ2×補正率」を計算することで、プリズム5の出射面での屈折の違い(プリズム5の形状や屈折率の変化)の影響を考慮して入射角θ2の値を補正することができる。
ただし、ここでは、「補正後の入射角θ2’=入射角θ2×補正率」であるとしている。
なお、プリズム5のタイプ(形状)としては、三角型(三角柱)、台形型(台形柱)、楔形、半円柱型、及び半球型等が例示できる。
具体的には、図12のステップS21(以下、単に「S21」などと記載する)で、ユーザーが入力装置11Aを使用して、光検出器8の受光面へ垂直に入射する光ビームの受光面上での位置をx0、検出レンズ7の焦点距離をf、及びプリズム5のタイプ及び屈折率を入力すると、インターフェイス部15がこれらをデジタルデータに変換して記録部11Bに一時記録させて、S22に進む。
S22では、引き続きユーザーが入力装置11Aを使用して、入射角θ1及び入射角θ3を入力すると、インターフェイス部15が入射角θ1及び入射角θ3をデジタルデータに変換して記録部11Bに一時記録させる。また、インターフェイス部15は、前記一時記録が終了すると、検出位置特定部16に「動作命令」を発してS23に進む。
S23では、検出位置特定部16が、インターフェイス部15から「動作命令」を受けて、光検出器8の検出結果(すべての暗線の位置)を取得してS24に進む。
S24では、検出位置特定部16が、入射角θ1に対応する暗線(低角側極小値)、屈折率測定用の暗線(中間極小値)、入射角θ3に対応する暗線(高角側極小値)を特定して、位置x1、位置x2、及び位置x3を得ると共に、取得した、位置x1、位置x2、及び位置x3をデジタルデータに変換し、記録部11Bに一時記録させる。
また、検出位置特定部16は、記録部11Bに一時記録が終了すると、入射角算出部17に「動作命令」を発してS25に進む。
S25では、入射角算出部17が、検出位置特定部16からの「動作命令」を受けると、記録部11Bから、入射角θ1及び入射角θ3、位置x0、位置x1、位置x2、及び位置x3並びに焦点距離fを読み出して、数式(2)に基づき、入射角θ2を算出し、S26に進む。
なお、ここでは、図11に基づく数式(2)を利用するフローに基づいて説明したが、図10に基づく数式(1)を利用するフローを用いても良い。
S26では、入射角補正部18が、入射角算出部17から入射角θ2を受けて、記録部11Bに予め記録されている「プリズム5のタイプ及び屈折率と入射角θ2の補正率との対応関係を示すテーブル情報」を参照して、「入射角θ2×補正率」を計算して、補正後の入射角θ2’を算出し、S27に進む。
S27では、図示しない屈折率・濃度換算部が、予め記録部11Bに記録した「入射角と屈折率・濃度との対応関係を示す換算テーブル(又は換算式、換算表など)」を参照して、入射角θ2’から、試料13の屈折率・濃度を算出して「END」となる。
前記構成によれば、センサーチップ交換による、センサーチップの高さ・傾きの誤差、並びにプリズム5のタイプや屈折率の違いによる誤差を補正して、さらに正確に、試料の屈折率や濃度を検出することができる。
以上より、簡易な構成で、センサーチップ交換時のセンサーチップの傾き及び高さの変化による測定誤差を補正することができる表面プラズモンセンサーシステム(表面プラズモンセンサー)1、入射角算出装置などを提供することができる。
本発明は上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
最後に、表面プラズモンセンサーシステム(表面プラズモンセンサー)1及び入射角算出装置の各ブロック、特に算出回路10及びその制御部は、ハードウェアロジックによって構成してもよいし、次のようにCPUを用いてソフトウェアによって実現してもよい。
すなわち、表面プラズモンセンサーシステム1及び入射角算出装置は、各機能を実現する制御プログラムの命令を実行するCPU(central processing unit)、前記プログラムを格納したROM(read only memory)、前記プログラムを展開するRAM(random access memory)、前記プログラム及び各種データを格納するメモリ等の記憶装置(記録媒体)などを備えている。そして、本発明の目的は、上述した機能を実現するソフトウェアである表面プラズモンセンサーシステム1及び入射角算出装置の制御プログラム、並びに、入射角計算プログラムのプログラムコード(実行形式プログラム、中間コードプログラム、ソースプログラム)をコンピュータで読み取り可能に記録した記録媒体を、表面プラズモンセンサーシステム1及び入射角算出装置に供給し、そのコンピュータ(又はCPUやMPU)が記録媒体に記録されているプログラムコードを読み出し実行することによっても、達成可能である。
前記記録媒体としては、例えば、磁気テープやカセットテープ等のテープ系、フロッピー(登録商標)ディスク/ハードディスク等の磁気ディスクやコンパクトディスク−ROM/MO/MD/デジタルビデオデイスク/コンパクトディスク−R等の光ディスクを含むディスク系、ICカード(メモリカードを含む)/光カード等のカード系、あるいはマスクROM/EPROM/EEPROM/フラッシュROM等の半導体メモリ系などを用いることができる。
また、表面プラズモンセンサーシステム1及び入射角算出装置を通信ネットワークと接続可能に構成し、前記プログラムコードを通信ネットワークを介して供給してもよい。この通信ネットワークとしては、特に限定されず、例えば、インターネット、イントラネット、エキストラネット、LAN、ISDN、VAN、CATV通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星通信網等が利用可能である。また、通信ネットワークを構成する伝送媒体としては、特に限定されず、例えば、IEEE1394、USB、電力線搬送、ケーブルTV回線、電話線、ADSL回線等の有線でも、IrDAやリモコンのような赤外線、Bluetooth(登録商標)、802.11無線、HDR、携帯電話網、衛星回線、地上波デジタル網等の無線でも利用可能である。なお、本発明は、前記プログラムコードが電子的な伝送で具現化された、搬送波に埋め込まれたコンピュータデータ信号の形態でも実現され得る。
なお、本発明の表面プラズモンセンサーは、光源と、前記光源から出射される光ビームの波長において透光性を有する誘電体基板と、前記誘電体基板上に形成される第1金属膜と、前記第1金属膜上に形成される誘電体膜と、前記誘電体膜上に形成される第2金属膜と、前記光源から出射された光ビームを、前記誘電体基板を通して前記第1金属膜及び第2金属膜及び誘電体膜に照射し、前記光ビームの各入射角に対する前記第1金属膜及び第2金属膜及び誘電体膜からの反射光を検出する検出手段とを備える表面プラズモンセンサーにおいて、前記反射光に3箇所以上の反射率の極小値が存在しても良い。
前記構成によれば、本発明の表面プラズモンセンサーは、第1金属膜、誘電体膜、第2金属膜が、誘電体基板上に順に積層された構成であることにより、前記反射光に3箇所以上の反射率の極小値が存在し、前記反射光に3箇所以上の極小値は、1箇所を従来の屈折率測定に用い、残りの2箇所をセンサーチップ交換による測定誤差の補正に用いることができる。
また、本発明の表面プラズモンセンサーは、光源と、前記光源から出射される光ビームの波長において透光性を有する誘電体基板と、前記誘電体基板上に形成される第1金属膜と、前記第1金属膜上に形成される誘電体膜と、前記誘電体膜上に形成される第2金属膜と、前記光源から出射された光ビームを、前記誘電体基板を通して前記第1金属膜及び第2金属膜及び誘電体膜に照射し、前記光ビームの各入射角に対する前記第1金属膜及び第2金属膜及び誘電体膜からの反射光を検出する検出手段とを備える表面プラズモンセンサーにおいて、前記誘電体膜は、屈折率が誘電体基板より小さく、かつ検出対象を含む液体又は検出対象を含む気体より大きくても良い。
前記構成によれば、第1金属膜、誘電体膜、第2金属膜が、誘電体基板上に順に積層された構成であることにより、前記反射光に3箇所以上の反射率の極小値が存在し、前記反射光に3箇所以上の極小値は、1箇所を従来の屈折率測定に用い、残りの2箇所をセンサーチップ交換による測定誤差の補正に用いることができる。
また、金属膜で表面プラズモンを励起することによる、反射光の極小値(暗線)が現れ、導波光を励起することにより現れる暗線より幅が狭い分、検出に用いる場合は検出分解能が、補正に用いる場合は測定誤差の補正精度が高くなる。
また、本発明の表面プラズモンセンサーは、光源と、前記光源から出射される光ビームの波長において透光性を有する誘電体基板と、前記誘電体基板上に形成される第1金属膜と、前記第1金属膜上に形成される誘電体膜と、前記誘電体膜上に形成される第2金属膜と、前記光源から出射された光ビームを、前記誘電体基板を通して前記第1金属膜及び第2金属膜及び誘電体膜に照射し、前記光ビームの各入射角に対する前記第1金属膜及び第2金属膜及び誘電体膜からの反射光を検出する検出手段とを備える表面プラズモンセンサーにおいて、前記誘電体膜の膜厚は、光源の波長より短くても良い。
前記構成によれば、第1金属膜、誘電体膜、第2金属膜が、誘電体基板上に順に積層された構成であることにより、前記反射光に3箇所以上の反射率の極小値が存在し、前記反射光に3箇所以上の極小値は、1箇所を従来の屈折率測定に用い、残りの2箇所をセンサーチップ交換による測定誤差の補正に用いることができる。
前記誘電体膜に接する2つの金属膜に励起される表面プラズモンが、互いに影響を及ぼし合い、結合し、いくつかの表面プラズモンモードとなる。これらのモードを励起することによる、反射光の極小値(暗線)は、導波光を励起することにより現れる暗線より幅が狭い分、検出に用いる場合は検出分解能が、補正に用いる場合は測定誤差の補正精度が高くなる。
また、本発明の表面プラズモンセンサーは、前記3箇所以上の反射率の極小値のうち、最も入射角の小さい極小値と、最も入射角の大きい極小値を参照して、他の極小値のうち、少なくとも1つの極小値が発生している角度を決定する算出手段を備えても良い。
前記構成によれば、センサーチップの位置・傾きが変わっても、発生する入射角が試料の屈折率の影響を受けにくい、最も入射角の小さい極小値と、最も入射角の大きい極小値から、角度がわかるため、これを基に、他の極小値のうち、少なくとも1つの極小値が発生している角度を決定することができる。すなわち、センサーチップ交換による、センサーチップの位置・高さ誤差を補正して、試料の屈折率や濃度を検出することができる。
また、本発明の表面プラズモンセンサーは、前記第1金属膜及び第2金属膜の材料は異なる材料からなっても良い。
前記構成によれば、反射率極小値(暗線)の幅が狭くなり、検出分解能を高くすることができる。
また、本発明の表面プラズモンセンサーは、少なくとも前記第2金属膜の材料は、金を主成分としても良い。
検出対象を含む液体又は検出対象を含む気体は、第2金属膜に直接接触させる。そのため、第2金属膜は前記液体又は前記気体によって化学反応を起こさない安定した金属から構成されていることが望ましい。
この点、金は、非常に安定した金属であり、錆びないために耐久性が高く、さらに、表面プラズモンを効率よく励起する。
このため、前記構成によれば、本発明の表面プラズモンセンサーの少なくとも第2金属膜の材料として金を用いることにより、前記検出対象を含む液体又は前記検出対象を含む気体によって化学反応を起こさず、該液体又は該気体の屈折率を高い分解能で検出するとともに、第2金属膜の酸化による経時劣化を防ぐことができる。
なお、金には不純物が含まれていてもよいが、一般に不純物濃度が高くなると、反射率の極小値が広くなり、検出分解能を下げることになるため、金の純度は高い方が好ましい。
また、本発明の表面プラズモンセンサーは、前記光源の波長は、600nm以上、1550nm以下であっても良い。
ここで、金属膜上に表面プラズモンを励起させるためには、光源から出射される光ビームの波長が重要である。上述したように、少なくとも第2金属膜は金から構成されていることがもっとも望ましいが、金から構成された第2金属膜上に表面プラズモンを励起するためには、600nm〜1550nmの波長の光ビームを該第2金属膜照射することが望ましい。
前記光源から約600nm〜約1550nmの波長の光ビームを金から構成された前記第2金属膜に照射することにより、表面プラズモンの励起効率が高まり、高い分解能で前記検出対象を含む液体又は前記検出対象を含む気体の屈折率を検出することができる。
また、本発明の表面プラズモンセンサーは、前記第2金属膜表面に、特定の物質を吸着する吸着層が設けられていても良い。
前記構成によれば、第2金属膜表面の屈折率変化は、ほぼ吸着対象の物質であると考えられることから、第2金属膜表面の屈折率変化から、吸着対象の物質の濃度変化を検出することができる。
また、本発明の表面プラズモンセンサーは、前記誘電体基板は、前記表面プラズモンセンサーから着脱可能であっても良い。
前記構成によれば、検出対象に応じて第1金属膜、誘電体膜、第2金属膜及び吸着層を誘電体基板ごと取り替えることが可能となる。これにより、1つの装置を用いて、多種の検出対象の検出や、感度や測定範囲・測定対象等を適宜変更することができる。すなわち、異なる吸着層を用いることにより、異なる吸着対象を検出することになる。また、第1金属膜、誘電体膜、第2金属膜が、他の材料や膜厚から構成されており、誘電体基板ごと取り替えることにより、前記表面プラズモンセンサーの感度や測定範囲・測定対象等を適宜変更することができる。
また、本発明の表面プラズモンセンサーは、前記算出手段は、極小値が発生する(プリズム5からセンサー膜6への)入射角のうち、最も小さい角度をθ1、最も大きい角度をθ3、他の極小値のうち、少なくとも1つの極小値が発生している角度をθ2とし、これらの光検出器8上の位置を、x1、x2、x3としたとき、
(x2-x1)/(x3-x1)=(θ2-θ1)/(θ3-θ1)
の関係を用いて、θ1、θ3からθ2を算出しても良い。
前記構成によれば、単純な算出式により、センサーチップ交換による、センサーチップの位置・高さ誤差を補正して、試料の屈折率や濃度を検出することができる。
また、本発明の表面プラズモンセンサーは、前記算出手段は、反射光のうち、光検出器8へ垂直に入射する光線の、光検出器8上での位置をx0、検出レンズ7の焦点距離をfとしたとき、
tan(θi)=(xi-x0)/f i=1,2,3
の関係を用いて、θ1、θ3からθ2を算出しても良い。
前記構成によれば、より正確に、センサーチップ交換による、センサーチップの位置・高さ誤差を補正して、試料の屈折率や濃度を検出することができる。
また、本発明の表面プラズモンセンサーは、前記算出手段は、誘電体基板の出射面での屈折を考慮して補正しても良い。
前記構成によれば、さらに正確に、センサーチップ交換による、センサーチップの位置・高さ誤差を補正して、試料の屈折率や濃度を検出することができる。