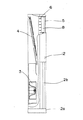
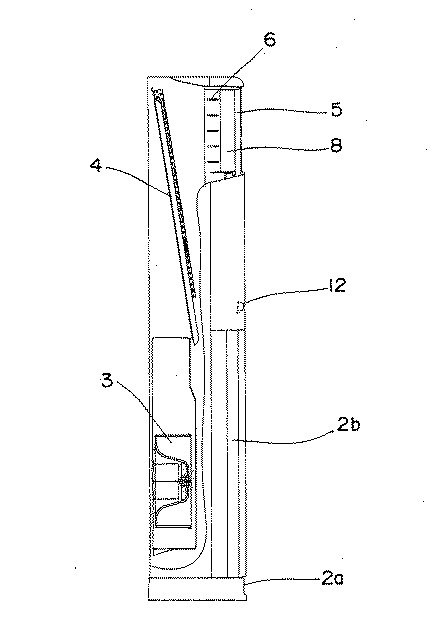
図1は本発明に係る床置き型空気調和機の斜視図であり、図2は縦方向の中心線に沿った部分断面図である。この床置き型空気調和機は、冷媒配管により互いに接続された室外機と室内機とで構成されており、図1及び図2は特に室内機を示している。
図1及び図2に示されるように、本発明に係る床置き型空気調和機は、略直方体状の筐体1を備え、筐体1の前面下部には、室内空気を吸引するための横長の吸込口2aが形成され、筐体1の下方における前面と両側面とのコーナー部には、同様に室内空気を吸引するための縦長の吸込口2bが形成されている。また、筐体1の前面上部には、吸込口2a,2bから吸引された空気を室内に吹き出すための横長の吹出口5が形成されている。
筐体1の内部下方には送風ファン3が配置され、送風ファン3の上方には熱交換器4が配置されており、室内空気は、吸込口2a,2bを介して送風ファン3により吸引されて熱交換器4により熱交換され、吹出口5を介して室内に吹き出される。したがって、熱交換器4は、筐体1の内部を通過する空気流から見ると送風ファン3の下流側に位置している。
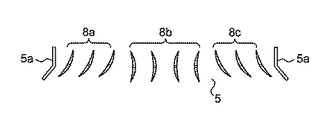
図2及び図3に示されるように、吹出口5の後方には、吹出空気を上下に吹き分けるための横方向に延びる複数の上下羽根(第1の風向羽根)6が配置されており、上下羽根6の前方には、吹出空気を左右に吹き分けるための縦方向に延びる複数の左右羽根(第2の風向羽根)8が配置されている。上下羽根6は駆動モータ7に連結されており、駆動モータ7に駆動されて複数枚の上下羽根6が一体的に上下に揺動する。一方、左右羽根8は、例えば9枚で構成されており、吹出口5を左側、中央、右側の3エリアに分け、それぞれのエリアに連結桟9で結合された3枚の左右羽根から成る左羽根ユニット8a、中央羽根ユニット8b、右羽根ユニット8cを配し、それぞれのユニットに駆動モータ(ステッピングモータ)10を接続し、3エリアの左右羽根8a,8b,8cをそれぞれ独立して角度変更することができる。
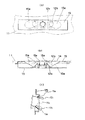
図3及び図4に示されるように、吹出口5の下方には前面パネル11が設けられており、前面パネル11には、人体検知装置を構成する複数(例えば、三つ)のセンサユニット12が前面パネル11の主平面から突出しない状態で取り付けられている。これらのセンサユニット12は、中央のセンサユニット12が正面を向き、その両側のセンサユニット12が左斜め前方あるいは右斜め前方を向いた状態で筐体1に取り付けられたセンサホルダ13に保持されており、これらのセンサユニット12の前方には、センサホルダ13の前面開口部を覆うようにセンサカバー14が取り付けられている。このセンサカバー14は、前面パネル11に形成された横長の矩形開口部11aに取り付けられ、機器内部にごみが侵入するのを防止すると同時に、人の手が直接センサユニット12に触れるのを防止するためのものである。センサカバー14は、例えばポリエチレン製で、赤外線の透過率をよくするため0.5ミリメートル程度の厚みに設定される。
各センサユニット12は、センサホルダ13に取り付けられ室内機の制御装置(図示せず)に電気的に接続された回路基板12aと、回路基板12aに取り付けられたフレネルレンズ12bと、フレネルレンズ12bの内部に実装された人体検知素子(図示せず)とで構成されている。さらに、人体検知素子は、例えば人体から放射される赤外線を検知することにより人の在否を検知する赤外線素子により構成されており、赤外線素子が検知する赤外線量の変化に応じて出力されるパルス信号に基づいて回路基板12aにより人の在否が判定される。
図5(a)及び(b)は、上記構成の人体検知装置の平面図と正面図をそれぞれ示しており、参照符号12cはフレネルレンズ12aの複数の焦点を通過する赤外線受光経路を示している。
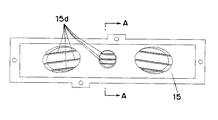
図4及び図5に示されるように、センサユニット12とセンサカバー14の間にはスペーサ15が設けられている。センサカバー14は比較的薄く、外部より加圧すると変形する(へこむ)可能性があるので、スペーサ15はセンサカバー14を補強するために配設されており、センサユニット12の赤外線受光経路12cが通過する箇所は赤外線受光経路12cが遮られないように、スペーサ15における複数のセンサユニット12に対向する位置に円形あるいは楕円形の貫通孔15a,15b,15cが形成されている。
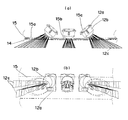
センサカバー14の強度を上げる他の方法として、図6の構成も可能である。図6は、センサカバー14を背面から見た斜視図であり、センサカバー14において赤外線受光経路12cを遮らない部位は厚みを厚くし、遮る部位は遮らない部位の厚みよりも薄く設定するとともに、センサユニット12に向かって突出する碁盤目状のリブ14aを設けることで、センサカバー14に必要な強度を確保することができる。また、図7に示されるように、リブ14aの高さは、その位置に応じて異なるように設定されており、その理由を図8のグラフを参照しながら説明する。
図8は、赤外線の透過率とセンサカバー14の厚みとの関係を示すグラフであり、センサカバー14の厚みが増大するにつれて赤外線の透過率は徐々に減少する。センサユニット12の感度に基づいて最小許容透過率を設定すると、この最小許容透過率に応じてセンサカバー14の最大許容厚みが図8のグラフより決定される。なお、ここでいうセンサカバー14の「厚み」とは、赤外線がセンサカバー14を通過する長さのことであり、赤外線受光経路12cに沿ったセンサカバー14の厚み(赤外線通過距離に相当)のことである。
したがって、最小許容透過率に対応する最大許容厚みをtとすると、図7に示されるように、赤外線の入射角度に応じてリブ14aの高さは異なり、赤外線の通過距離がtを越えないようにリブ14aの位置に応じてリブ14aの高さを変えることにより、複数の赤外線通過経路12cの全てにおいて、センサカバー14の厚みを最大許容厚みtより小さく設定している。
また、リブ14aを設ける代わりに、図9に示されるように、赤外線の入射角度に応じて赤外線の通過距離が最大許容厚みtを越えないようにセンサカバー14の厚みを徐々に変えることによりセンサカバー14を補強することもできる。
図10及び図11は、センサカバー14を補強するさらに別の方法を示しており、スペーサ15における貫通孔15a,15b,15cが形成された部位に、赤外線受光経路12cの間隙をぬって略同一方向に延びる複数のリブ15dを設けることにより、センサカバー14のたわみを緩和することができる。
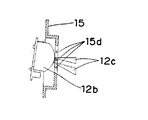
図12は、スペーサ15の貫通孔15a,15b,15cの周囲からセンサユニット12のフレネルレンズ12bの外周部に向かって延びる筒状(円錐状)リブ15eをスペーサ15に一体的に形成したもので、機器外部から見て、回路基板12aを覆う形となっている。このように構成することで、過ってセンサカバー14を鋭利なもので突き破ったような場合でも、回路基板12aに手が触れることがないので、感電等の虞がなく、安全性を向上させることができる。
なお、上述したセンサカバー14は前面パネル11に固定されているが、固定式センサカバー14に代えて可動式センサカバーを採用し、室内機の制御装置により可動式センサカバーを開閉制御し、空気調和機の停止時には可動式センサカバーを閉止する一方、空気調和機の運転中には可動式センサカバーを開放するようにしてもよい。
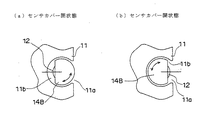
図13及び図14は、昇降式センサカバー14Aを前面パネル11の裏面に取り付けた例を示しており、図13(a)及び図14(a)は、センサカバー14Aの閉状態を、図13(b)及び図14(b)は、センサカバー14Aの開状態を示している。
図13及び図14に示されるように、前面パネル11の裏面にはセンサカバー14Aが昇降自在に取り付けられ、センサカバー14Aが開閉する開口部11aの上方の前面パネル11の裏面には、電動モータ等の駆動源17が取り付けられている。
空気調和機の停止時には、室内機の制御装置から駆動源17にはセンサカバー14Aの開信号は入力されず、図13(a)及び図14(a)に示されるように、センサカバー14Aは閉止位置にある。
一方、空気調和機の運転開始時には、室内機の制御装置から駆動源17にセンサカバー14Aの開信号が入力され、図13(b)及び図14(b)に示されるように、センサカバー14Aは駆動源17により上方に摺動して、開口部11aの全開位置に保持され、センサユニット12は人の在否を検知できる状態になる。その後、空気調和機が停止すると、室内機の制御装置から駆動源17にセンサカバー14Aの閉信号が入力され、センサカバー14Aは駆動源17により下方に摺動して、開口部11aの全閉位置に保持される。
この構成では、空気調和機が停止状態のとき、センサユニット12はセンサカバー14Aで覆われているため、居住者に容易に触れられることがなく、またデザイン的にも優れている。
図15及び図16は、可動式センサカバーの別の例を示しており、回転式センサカバー14Bを前面パネル11に取り付けたものである。また、図16(a)は、センサカバー14Bの閉状態を、図15及び図16(b)は、センサカバー14Bの開状態を示している。
この構成は、前面パネル11に略円筒状の凹部11bを形成するとともに、複数のセンサユニット12が取り付けられた図4に示されるセンサホルダ13を略円筒状のセンサカバー14Bと一体的に形成し、このセンサカバー14Bを凹部11bに回動自在に収容したものである。
センサカバー14Bの一部は平面上に形成され、この平面に矩形開口部14Cを形成し、この開口部14Cから複数のセンサユニット12を露出させるとともに、センサユニット12の背面側をセンサカバー14Bで覆っている。また、センサカバー14Bは、電動モータ等の駆動源を含む駆動機構(図示せず)に連結されている。
空気調和機の停止時には、室内機の制御装置から駆動機構にはセンサカバー14Bの開信号は入力されず、図16(a)に示されるように、前面パネル11の開口部11aはセンサカバー14Bにより閉止され、センサユニット12は後方を向いている。
一方、空気調和機の運転開始時には、室内機の制御装置から駆動機構にセンサカバー14Bの開信号が入力され、図15及び図16(b)に示されるように、駆動機構はセンサカバー14Bをセンサユニット12とともに一体的に180度回転して、センサユニット12をセンサカバー14Bの開口部14Cと前面パネル11の開口部11aを介して露出させる。その後、空気調和機が停止すると、室内機の制御装置から駆動機構にセンサカバー14Bの閉信号が入力され、センサカバー14Bは駆動機構により180度回転して、開口部11aの全閉位置に保持される。
この構成は、空気調和機が停止状態のとき、センサユニット12は筐体1の内部に格納されるため、居住者に容易に触れられることがなく、またデザイン的にも優れている。さらに、センサユニット12を回転する駆動機構を備えているので、この駆動機構をセンサユニット12の向きを自動調整するための駆動源として兼用することができ、センサユニット12の回転駆動機構及び自動調整機構を安価で簡素な構成にすることができる。
本実施の形態において、センサユニット12は、その上下方向の中心位置が筐体1の底面、つまり室内機を設置した室内の床面から100〜120センチメートルの高さに取り付けられ、好ましくは筐体1の底面から110センチメートルの高さに取り付けられる。以下、その理由を図17を参照しながら説明する。
図17(a)は、センサユニット12を筐体1の底面から110センチメートルの高さに配置した時にセンサユニット12が人の存在を感知できる範囲(斜線部)を示している。人が椅子に座った時の頭の位置は床から約110センチメートルで、室内に配置されているソファーやテーブルなどの什器の高さは約90センチメートル以下であり、センサユニット12を床から100〜120センチメートルの位置に配置した場合、センサユニット12の上下方向の視野範囲の上限をセンサユニット12から見て水平方向より若干上に向けて設定すれば、手前から遠方まで距離に関係なく人の頭の動きを感知することができる。センサユニット12の視野範囲の上限としては、例えば水平方向より約3度上方に設定するのが好ましく、略5度上方まで許容できることが確認できた。このように設定することで、什器が有っても人の頭を感知することが可能となり、赤外線を感知できない死角部分を極力少なくすることができる。
また、センサユニット12の上下方向の視野範囲の下限としては、センサユニット12から見て水平方向よりできるだけ下向きに設定し、上下方向の視野範囲の上限の上向き角度よりも、視野範囲の下限の下向き角度の方が大きくなるように視野範囲を設定することで、より手前にいる人の頭より下の体の動きを感知することができる。このように設定することで、頭より下の動きだけでも人を感知することが可能となり、さらに、赤外線を感知できない死角部分を極力少なくすることができる。
さらに、図12(c)はセンサユニット12の取り付け部分の垂直断面図を示しており、図12(c)に示されるように、スペーサ15の貫通孔15a,15b,15cの周囲からセンサユニット12のフレネルレンズ12bの外周部に向かって延びる筒状(円錐状)リブ15eは、赤外線受光経路12cの上下方向の視野範囲の上限の外側近傍と下限の外側近傍を仕切るように設けている。また、上下方向の視野範囲の上限の上部近傍に位置するリブ材15eの水平面に対する上向きの傾き角度よりも、上下方向の視野範囲の下限の下部近傍に位置するリブ材15eの水平面に対する下向きの傾き角度の方が大きくなるように、リブ材15eを形成したことにより、人を検知するために必要な上下方向の視野を確保しながら視野外からの赤外線の入光を遮ることが可能となり、視野外からの赤外線の外乱によるセンサユニット12の誤検知を防止しながら、視野内での人の検知を確実に行うことができる。すなわち、リブ15eは、視野外赤外線遮光部材あるいはセンサ誤検知防止部材として作用する。
図17(b)は、筐体1の底面から190センチメートルの高さの筐体1の上部にセンサユニット12を配置した時にセンサユニット12が人の存在を感知できる範囲(斜線部)を示している。この場合、吹出口5はセンサユニット12の下方に位置しており、暖房時には、暖かい空気が下から上に上昇してセンサユニット12の表面に吹出空気の流れが生じることで表面温度が変化し、この表面温度の変化の影響を受けセンサユニット12の感度が不安定になる虞がある。また、室内機の手前側(図17(b)の黒色部)に赤外線を感知できない死角が生じ、この死角部も感知するためには、新たなセンサユニットを設けて、図17(c)に示されるように死角部を少なくしなければならず、コストが増大する。
すなわち、図17(a)に示す位置にセンサユニット12を配置することにより、センサユニット12の感度が安定化し、安価にもかかわらず死角を極力少なくして、人を感知できるシステムを構築できる。
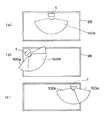
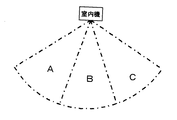
ここで、床置き型空気調和機の室内機の設置位置としては、図18(a)(b)(c)に示すような形態が考えられる。図18(a)は、室内機が4壁面で囲まれた居室99の1壁面の略中央に配置された場合を示しており、図18(b)は、室内機が2壁面のコーナー部に居室99の略中央に向けて風を吹き出すように配置された場合を示している。また、図18(c)は、室内機が居室99の1壁面の端部に室内機本体の背面を沿わせて配置された場合を示している。なお、図18(a)(b)(c)の各図中に示された扇形100a,100bは、センサユニット12で検知される人体位置判別領域を示している。
図18(a)に示す室内機の設置形態では、中心角が広い扇形100aの人体位置判別領域でなければ居室99の略全域を網羅できないのに対して、図18(b)に示す形態では、中心角が広い扇形100aの人体位置判別領域では、居室99の2壁面に人体位置判別領域の両側が遮られるため、有効な人体位置判別ができない場合があり、この形態では中心角が狭い扇形100bの人体位置判別領域の方が望ましい。また、図18(c)に示す形態では、中心角が広い扇形100aの人体位置判別領域では、居室99の1壁面に人体位置判別領域の片側が遮られるため、有効な人体位置判別ができない場合があり、この形態では中心角が狭く、かつ扇形100bの中心線が居室99の中央方向に変位した人体位置判別領域が望ましい。
そこで、本実施の形態においては、センサユニット12を筐体1に対して可動設定することで、室内機の設置位置に応じて人体位置判別領域を調整できるようにしている。以下、その構成について説明する。
図19は、センサユニット12の可動機構を示している。
図19に示されるように、センサユニット12は回路基板12aとフレネルレンズ12b(人体検知素子を含む)で構成され、フレネルレンズ12bには、共通の軸心を持つ上下一対の回転軸12b1が設けられており、フレネルレンズ12bは、これら一対の回転軸12b1を介して略U字状のセンサユニット支持部材112に回動自在に取り付けられている。センサユニット支持部材112は筐体1に取り付けられており、センサユニット12は、筐体1に対して略水平方向に回動できる構成である。
なお、図19は複数のセンサユニット12の一つを図示しているが、複数のセンサユニット12の各々に同様の機構を設け、各々独立して可動構成することで、人体位置判別領域の扇形の中心角を広くもしくは狭くなるように調整したり扇形の中心位置をずらすことができる。
また、センサユニット支持部112に対する一対の回転軸12b1の取付部に複数のノッチを形成し、回転軸12b1の1ノッチ分の回転角度を所定の角度に設定しておけば、人体位置判別領域の扇形の中心角調整操作が容易である。
さらに、図19の可動機構は手動調整されるものを示しているが、一対の回転軸12b1の一方を電動モータ等の駆動源に連結することも可能で、この場合、リモコン(遠隔操作装置)を操作して駆動源によりセンサユニット可動機構を駆動することもできる。
さらに詳述すると、室内機の設置位置を示す「中央設置」、「左設置」、「右設置」あるいは「コーナー設置」等のボタンをリモコンに設け、図18(a)に示されるように室内機が設置された場合には「中央設置」のボタンを、図18(b)に示されるように室内機が設置された場合には「コーナー設置」のボタンを、図18(c)に示されるように室内機が設置された場合には「右設置」のボタンをそれぞれ押下することにより、人体位置判別領域の扇形の中心位置及び中心角を自動設定することが可能となり、効率のよい空調運転を容易に行うことができる。
また、リモコンを使用することなく、人体位置判別領域の扇形の中心位置あるいは中心角を自動設定することも可能である。その構成を図18(c)を参照しながら説明する。
図18(c)に示されるように室内機が設置された場合、同図の右側の領域は、複数のセンサユニット12の検知結果に基づいて人が生活しない非生活領域と判定される可能性がある。この場合、非生活領域は空調する必要がないので、センサ可動機構により各センサユニット12を非生活領域の反対側に自動的に移動させて人体位置判別領域の扇形の中心位置をずらすとともに中心角を変更することにより、室内機の設置位置に応じた効率の良い空調運転を行うことができる。なお、複数のセンサユニット12の検知結果及び人が生活しない非生活領域については後述する。
図20は、センサユニット12の視野角調整機構を示している。
図20に示されるように、視野角調整機構は、略U字状の一対の遮蔽部材113a,113bを有し、各遮蔽部材113a,113bの上下二つのアーム113a1,113b1の一端は、フレネルレンズ12bの上下に設けられた共通の軸心を持つ一対の支軸12b2にそれぞれ回動自在に取り付けられている。一対の遮蔽部材113a,113bのレンズ遮蔽部113a2,113b2は、フレネルレンズ12bの前面の両側に位置しており、センサユニット12へ進入する赤外線の一部を遮蔽することができる。
また、図19に示されるセンサユニット12の可動機構と図20に示されるセンサユニット12の視野角調整機構を一体化すると特に有効で、センサユニット12により検知される室内の領域区分を任意に変更することができる。例えば、人体位置判別領域の扇形の中心角を狭く設定する場合に、遮蔽部材113a,113bでフレネルレンズ12bの視野角を狭く設定することにより、狭い範囲内で有効な人体位置判別が可能となる。この場合、図19に示されるセンサユニット12の可動機構において、一対の回転軸12b1を遮蔽部材113a,113bの支軸12b2として使用することもできる。
本実施の形態においては、センサユニット12は居室の床面から100〜120センチメートルの高さ、好ましくは110センチメートルの高さに配置しているので、人が容易に触れることができ、手動調整が可能である。
また、図21(a)に示されるように、居室99の形状が正方形に近い長方形の場合には、人体位置判別領域は中心角が広い扇形100aが好ましいが、図21(b)に示されるように、居室99が横長の長方形で、室内機が短辺となる壁面に設置された場合、人体位置判別領域は、中心角が広い扇形100aよりもむしろ中心角が狭い扇形100bの方が好ましく、室内機の正面から略直線上で距離方向に分割された領域毎に人の在否を判別するのが好ましい。
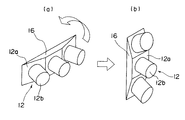
図22は、センサユニット回転機構を示しており、回路基板12aとフレネルレンズ12bとでそれぞれ構成される複数のセンサユニット12をセンサホルダ13に回動自在に取り付けられたセンサ取付台16に取り付け、中心角が広く奥行きが短い扇形100aの人体位置判別領域と、中心角が狭く奥行きが長い扇形100bの人体位置判別領域の両方に対応できるように構成したものである。
すなわち、図21(a)に示されるように中心角が広い扇形100aの人体位置判別領域に対しては、図22(a)に示される状態でセンサユニット12を使用する一方、図21(b)に示されるように中心角が狭い扇形100bの人体位置判別領域に対しては、図22(a)に示される状態からセンサ取付台16を90度回転させて複数のセンサユニット12を一体的に90度回転させることで、人体位置判別領域を室内機から見て幅方向に広い扇形100aから、幅方向に狭く室内機の正面から略直線上で距離方向に分割された複数の領域で人体位置を判別することができる。
実際には、図22(a)の状態で各フレネルレンズ12bの前面が多少下を向くように、センサ取付台16はセンサホルダ13に対し傾斜して取り付けられており、センサ取付台16を90度回転した図22(b)の状態では、上方のセンサユニット12で図21(b)に示されるように室内機から最も遠い領域における人の在否を、中央のセンサユニット12で中央の領域における人の在否を、下方のセンサユニット12で室内機に最も近い領域における人の在否を判別するようにしている。
次に、人の位置判定方法につき、図23に示されるように人体位置判別領域が室内機から見て幅方向に広い扇形を例に取り説明する。
図23は、三つのセンサユニット12で構成される人体検知装置により検知される人体位置判別領域の区分を示す平面図であり、人体検知装置によりどの領域に人がいるかどうかを検知することができる。以下の説明では、センサユニット12に向かって左側に配置されたセンサユニット12をセンサA、中央に配置されたセンサユニット12をセンサB、右側に配置されたセンサユニット12をセンサCといい、これらのセンサA,B,Cで人の在否が検知される領域は次のとおりである。
センサA:領域A(室内機に向かって左側の領域)
センサB:領域B(室内機に向かって中央の領域)
センサC:領域C(室内機に向かって右側の領域)
図24は、センサA,B,Cを使用して、領域A〜Cの各々に後述する領域特性を設定するためのフローチャートで、図25は、センサA,B,Cを使用して、領域A〜Cのどの領域に人がいるか否かを判定するフローチャートである。
ステップS1において、所定の周期T1(例えば、5秒)で各領域における人の在否が表1に基づいて判定され、ステップS2において、全てのセンサ出力をクリアする。
ここで、図26を参照してセンサA,B,Cからの出力を使用して領域A,B,Cにおける人の在否判定を説明する。
図26に示されるように、時間t1の直前の周期T1においてセンサA,B,CがいずれもOFF(パルス無し)の場合、時間t1において領域A,B,Cに人はいないと判定する(A=0,B=0,C=0)。次に、時間t1から周期T1後の時間t2までの間に第1のセンサAのみON信号を出力し(パルス有り)、センサB,CがOFFの場合、時間t2において領域Aに人がいて、領域B,Cには人がいないと判定する(A=1,B=0,C=0)。さらに、時間t2から周期T1後の時間t3までの間にセンサA,CがON信号を出力し、センサBがOFFの場合、時間t3において領域A,Cに人がいて、領域Bには人がいないと判定する(A=1,B=0,C=1)。以下、同様に周期T1毎に各領域A,B,Cにおける人の在否が判定される。
本実施の形態においては、上述した判定結果に基づいて各領域A〜Cを、人が良くいる第1の領域(良くいる場所)、人のいる時間が短い第2の領域(人が単に通過する領域、滞在時間の短い領域等の通過領域)、人のいる時間が非常に短い第3の領域(壁、窓等人が殆ど行かない非生活領域)とに判別する。以下、第1の領域、第2の領域、第3の領域をそれぞれ、生活区分I、生活区分II、生活区分IIIといい、生活区分I、生活区分II、生活区分IIIはそれぞれ、領域特性Iの領域、領域特性IIの領域、領域特性IIIの領域ということもできる。また、生活区分I(領域特性I)、生活区分II(領域特性II)を併せて生活領域(人が生活する領域)とし、これに対し、生活区分III(領域特性III)を非生活領域(人が生活しない領域)とし、人の在否の頻度により生活の領域を大きく分類してもよい。
この判別は、図24のフローチャートにおけるステップS3以降で行われ、この判別方法について図27及び図28を参照しながら説明する。
図27は、一つの和室とLD(居間兼食事室)と台所とからなる1LDKのLDに本発明に係る空気調和機の室内機を設置した場合を示しており、図27における楕円で示される領域は被験者が申告した良くいる場所を示している。
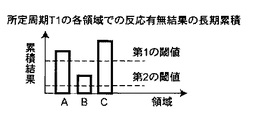
上述したように、周期T1毎に各領域A〜Cにおける人の在否が判定されるが、周期T1の反応結果(判定)として1(反応有り)あるいは0(反応無し)を出力し、これを複数回繰り返した後、ステップS3において、所定の空調機の累積運転時間が経過したかどうかを判定する。ステップS3において所定時間が経過していないと判定されると、ステップS1に戻る一方、所定時間が経過したと判定されると、各領域A〜Cにおける当該所定時間に累積した反応結果を二つの閾値と比較することにより各領域A〜Cをそれぞれ生活区分I〜IIIのいずれかに判別する。
長期累積結果を示す図28を参照して、さらに詳述すると、第1の閾値及び第1の閾値より小さい第2の閾値を設定して、ステップS4において、各領域A〜Cの長期累積結果が第1の閾値より多いかどうかを判定し、多いと判定された領域はステップS5において生活区分Iと判別する。また、ステップS4において、各領域A〜Cの長期累積結果が第1の閾値より少ないと判定されると、ステップS6において、各領域A〜Cの長期累積結果が第2の閾値より多いかどうかを判定し、多いと判定された領域は、ステップS7において生活区分IIと判別する一方、少ないと判定された領域は、ステップS8において生活区分IIIと判別する。
図27の例では、領域A,Cが生活区分Iとして判別され、領域Bが生活区分IIとして判別される。
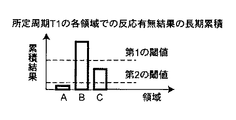
また、図29は別のLDKのLDに本発明に係る空気調和機の室内機を設置した場合を示しており、図30はこの場合の長期累積結果を元に各領域A〜Cを判別した結果を示している。図29の例では、領域Bが生活区分Iとして判別され、領域Cが生活区分IIとして判別され、壁側の領域Aが生活区分IIIとして判別される。
なお、上述した領域特性(生活区分)の判別は所定時間毎に繰り返されるが、判別すべき室内に配置されたソファー、食卓等を移動することがない限り、判別結果が変わることは殆どない。
次に、図25のフローチャートを参照しながら、各領域A〜Cにおける人の在否の最終判定について説明する。
ステップS11〜S12は、上述した図24のフローチャートにおけるステップS1〜S2と同じなので、その説明は省略する。ステップS13において、所定数M(例えば、15回)の周期T1の反応結果が得られたかどうかが判定され、周期T1は所定数Mに達していないと判定されると、ステップS11に戻る一方、周期T1が所定数Mに達したと判定されると、ステップS14において、周期T1×Mにおける反応結果の合計を累積反応期間回数として、1回分の累積反応期間回数を算出する。この累積反応期間回数の算出を複数回繰り返し、ステップS15において、所定回数分(例えば、N=4)の累積反応期間回数の算出結果が得られたかどうかが判定され、所定回数に達していないと判定されると、ステップS11に戻る一方、所定回数に達したと判定されると、ステップS16において、既に判別した領域特性と所定回数分の累積反応期間回数を元に各領域A〜Cにおける人の在否を推定する。
なお、ステップS17において累積反応期間回数の算出回数(N)から1を減算してステップS11に戻ることで、所定回数分の累積反応期間回数の算出が繰り返し行われることになる。
表2は最新の1回分(時間T1×M)の反応結果の履歴を示しており、表2中、例えばΣA0は領域Aにおける1回分の累積反応期間回数を意味している。
ここで、ΣA0の直前の1回分の累積反応期間回数をΣA1、さらにその前の1回分の累積反応期間回数をΣA2・・・とし、N=4の場合、過去4回分の履歴(ΣA4、ΣA3、ΣA2、ΣA1)のうち、生活区分Iについては、1回以上の累積反応期間回数が1回でもあれば、人がいると判定する。また、生活区分IIについては、過去4回の履歴のうち、1回以上の累積反応期間回数が2回以上あれば、人がいると判定するとともに、生活区分IIIについては、過去4回の履歴のうち、2回以上の累積反応期間回数が3回以上あれば、人がいると判定する。
次に、上述した人の在否判定から時間T1×M後には、次の4回分の履歴(ΣA3、ΣA2、ΣA1、ΣA0)を元に人の在否判定が行われる。
すなわち、本発明に係る空気調和機の室内機においては、所定周期毎の領域判定結果を長期累積した領域特性と、所定周期毎の領域判定結果をN回分累積し、求めた各領域の累積反応期間回数の過去の履歴から人の所在地を推定することで、確率の高い人の位置推定結果を得るようにしている。
表3は、このようにして人の在否を判定し、T1=5秒、M=12回に設定した場合の在推定に要する時間、不在推定に要する時間を示している。
このようにして、本発明に係る空気調和機の室内機により空調すべき領域をセンサA,B,Cにより複数の領域A〜Cに区分した後、各領域A〜Cの領域特性(生活区分I〜III)を決定し、さらに各領域A〜Cの領域特性に応じて在推定に要する時間、不在推定に要する時間を変更するようにしている。
すなわち、空調設定を変更した後、風が届くまでには1分程度要することから、短時間(例えば、数秒)で空調設定を変更しても快適性を損なうのみならず、人がすぐいなくなるような場所に対しては、省エネの観点からあまり空調を行わないほうが好ましい。そこで、各領域A〜Cにおける人の在否をまず検知し、特に人がいる領域の空調設定を最適化している。
詳述すると、生活区分IIと判別された領域の在否推定に要する時間を標準として、生活区分Iと判別された領域では、生活区分IIと判別された領域より短い時間間隔で人の存在が推定されるのに対し、その領域から人がいなくなった場合には、生活区分IIと判別された領域より長い時間間隔で人の不存在を推定することにより、在推定に要する時間を短く、不在推定に要する時間は長く設定されることになる。逆に、生活区分IIIと判別された領域では、生活区分IIと判別された領域より長い時間間隔で人の存在が推定されるのに対し、その領域から人がいなくなった場合には、生活区分IIと判別された領域より短い時間間隔で人の不存在を推定することにより、在推定に要する時間を長く、不在推定に要する時間は短く設定されることになる。さらに、前述のように長期累積結果によりそれぞれの領域の生活区分は変わり、それに応じて、在推定に要する時間や不在推定に要する時間も可変設定されることになる。
また、センサA,B,Cを使用して、人の在否だけでなく、領域A〜Cでの人の「活動量」を判定することができる。
人の活動量とは人の動きの大きさの度合いを示す概念で、複数の活動量レベルに分類され、例えば「安静」、「活動量大」、「活動量中」、「活動量小」に分類される。
「安静」とは、ソファで寛いでいる、テレビを視聴している、パソコンを操作している等、同じ場所に人が継続している状態が持続している場合のことで、安静状態が持続した場合、代謝量が低下して寒く感じる。活動量「大」とは、室内の清掃等広域で活動している場合のことで、代謝量増加により暑く感じる。活動量「中」とは、炊事等狭域で活動している場合のことで、代謝量増加によりやや暑く感じる。活動量「小」とは、食事等同じ場所で多少活動している場合のことで、代謝量に大きな変化は見られない。
次に、人の活動量の分類方法について図31のフローチャートを参照しながら詳述する。
まずステップS21において、所定時間T1毎に各センサA,B,Cの反応頻度(出力パルス有り)を計測し、ステップS22において、計測回数が所定回数に達したかどうかを判定する。なお、所定時間T1は、上述した人の在否判定における所定の周期T1と同じであるが、ここでは、例えば2秒に設定され、計測回数の所定回数は、例えば15回に設定されるものと仮定し、15回の計測を総称して1ユニット計測(30秒間の計測)という。また、ここでいう「計測回数」とは、領域A〜Cのいずれかの領域における計測回数のことで、全ての領域A〜Cに対し同様の計測が行われる。
ステップS22において、計測回数が所定回数に達していないと判定されるとステップS21に戻り、計測回数が所定回数に達し1ユニット計測が終了したと判定されると、ステップS23において、4ユニット計測(2分間の計測)が終了したかどうかを判定する。ステップS23において、4ユニット計測が終了していない場合にはステップS21に戻り、4ユニット計測が終了している場合にはステップS24に移行する。
ステップS24においては、4ユニット計測(現在の1ユニット計測を含め過去4回のユニット計測)のセンサの合計反応頻度が所定数(例えば、5回)に達したかどうかを判定し、所定数に達していれば、ステップS25において、「活動量小」と判定された後の合計ユニット計測数(p、詳しくは後述)がクリアされた後、ステップS26に移行する。
ステップS26においては、全領域A〜Cにおけるセンサの合計反応頻度が所定数(例えば、40回)に達したかどうかを判定し、所定数に達している場合には、ステップS27において、「安静」と判定された領域を除き在判定された全ての領域が「活動量大」と判定される一方、所定数に達していない場合には、ステップS28において、4ユニット計測のセンサの合計反応頻度が所定数に達した領域が「活動量中」と判定される。ステップS27あるいはステップS28における活動量判定後、ステップS29において、ユニット計測数(q)から1を減算してステップS21に戻る。すなわち、連続する4ユニット計測で各センサの合計反応頻度が所定数を超え「活動量大」あるいは「活動量中」と判定された領域は、さらに次回の1ユニット計測後、その時点における4ユニット計測の合計反応頻度が所定数を超えた場合には、引き続き「活動量大」あるいは「活動量中」と判定される。
また、ステップS24において、4ユニット計測でセンサの合計反応頻度が所定数未満と判定されると、ステップS30において、その領域が「安静」かどうかが判定され、「安静」でなければ、ステップ31において「活動量小」と判定される。次のステップS32において、「活動量小」と判定された後の合計ユニット計測数(p)がカウントされ、ステップS33において、「活動量小」と判定された後60ユニット計測(30分間の計測)が終了したかどうかを判定する。
ステップS33において、60ユニット計測が終了していないと判定されると、ステップS29に移行する一方、60ユニット計測が終了したと判定されると、60ユニット計測の全てにおいて「活動量小」と判定された領域が、ステップS34において「安静」と判定された後、ステップS29に移行する。すなわち、ステップS29に移行することで、次の1ユニット計測を含む過去4回のユニット計測で各センサの合計反応頻度に応じて、各領域A〜Cは「活動量大」、「活動量中」、「活動量小」あるいは「安静」と新たに判定されることになる。
空気調和機の電源をONした後の活動量計測当初は、どの領域の活動量も不明であるが、このフローチャートによれば、計測開始から4ユニット計測が終了して初めて、各領域A〜Cにおいて「活動量大」、「活動量中」あるいは「活動量小」の判定が行われ、60ユニット計測が終了して初めて、「安静」の判定が行われることになる。したがって、計測開始後しばらくは「安静」の領域は存在しないので、ステップS30においてNOと判定され、ステップS31において「活動量小」と判定される。その後、「活動量小」と継続して判定された領域は、60ユニット計測終了後、ステップS34において「安静」と判定され、その後4ユニット計測のセンサの合計反応頻度が所定数未満であれば、引き続き「安静」と判定される。
なお、ステップS25において、「活動量小」と判定された後の合計ユニット計測数(p)をクリアするのは、「安静」との判定は、「活動量小」の判定が起点となるからである。
要約すると、各センサA,B,Cは、人体検知手段としての機能に加え、活動量検知手段としても機能し、図31のフローチャートにより、各領域A〜Cは、例えば次のように判定される。
(1)安静
センサ反応頻度が5回未満/2分が30分以上継続した領域
(2)活動量大
全領域A〜Cのセンサ反応頻度の総和が40回以上/2分で、少なくとも一つの領域でセンサ反応頻度が2分間で5回以上継続した場合において、「安静」と判定された領域を除く全ての領域
(3)活動量中
全領域A〜Cのセンサ反応頻度の総和が40回未満/2分の場合に、センサ反応頻度が2分間で5回以上継続した領域
(4)活動量小
安静、活動量大、活動量中と判定されなかった領域
また、各領域A〜Cにおける空調設定に応じて、上下羽根6と左右羽根8の風向制御及び送風ファン3の回転数制御が行われるが、これらの制御について以下説明する。
風向制御は、人がいると判定された領域に風を向けるか否かを選択できる風除け選択手段をリモコン等に設けることで、居住者が風に直接当たりたいか否かの選択に応じて、人がいると判定された領域に風を向ける風向設定と、人がいないと判定された領域に風を向ける風向設定とを変更可能になっている。なお、リモコンからの出力信号は、室内機の制御装置に入力され、この制御装置により上下羽根6と左右羽根8の風向制御及び送風ファン3の回転数制御は行われる。
図23に示される人体位置判別領域の場合、上下羽根6の風向制御については、暖房時には、風除け無し選択時は足元を暖めるために床方向を狙って上下羽根6の角度を下向きに設定し、風除け有り選択時は温風が直接身体にあたらないように上向きに設定する。冷房時には、風除け無し選択時は人の上半身を狙って上下羽根6の角度を水平からやや下向きに制御し、風除け有り選択時は冷風が直接身体に当たらないように上向きに設定する。
次に、左右羽根8の風向制御について説明する。
上述したように、左のエリアに存在する3枚の左羽根ユニット8aは一つの駆動モータ(ステッピングモータ)10と連結されており、駆動モータ10の回転角度に合わせて3枚の左羽根ユニット8aが同じ方向に同じ角度で回転し、所定の角度に可変設定できるように構成されている。また、3枚の中央羽根ユニット8b、3枚の右羽根ユニット8cも同様に、各々駆動モータ10に連結されて回転制御され、9枚の左右羽根8が左、中央、右に各3枚ずつエリア毎に分離した状態で独立して角度設定される。
人がいると判定された領域が一つの場合、左右羽根8は基本的に次のように制御される。
(1)風除け選択手段により「風除け無し」が選択された場合
・全ての左右羽根8は人がいる領域に向けて制御される。
(2)風除け選択手段により「風除け有り」が選択された場合
左右羽根8は人がいない各領域に向けて制御され、この場合の制御は、人がいる領域に対する人がいない領域の隣接度(隣接の度合い)あるいは人がいない領域の領域特性に応じて行われる。なお、隣接度とは、人がいる領域に対する人がいない領域の距離を意味しており、領域Bに人がいて、領域A,Cに人がいない場合、領域Bに対し領域A及び領域Cの隣接度は同じで、領域Aに人がいて、領域B,Cに人がいない場合、領域Aに対し領域Bは領域Cより隣接度が高いことになる。
(i)人がいる領域に対する人がいない二つの領域の隣接度が同じ場合
・人のいる頻度が高い領域の風量が人のいる頻度が低い領域の風量より多くなるように左右羽根8を制御する。
・人のいる頻度が同じ場合には、複数の領域の風量が同じになるように左右羽根8を制御する。
(ii)人がいる領域に対する人がいない二つの領域の隣接度が異なる場合
・隣接度の高い領域の風量が多くなるように左右羽根8を制御する。
・隣接度が低い領域が非生活領域の場合、全ての左右羽根8は隣接度が高い領域に向くように制御される。
次に、その具体例を図32を参照しながら詳述する。
図32は、人がいると判定された領域が一つの場合における、風除け無しの場合と風除け有りの場合の左右羽根8の風向角度の設定の一例を示している。図32の(a1)及び(a2)は正面の領域Bに人がいる場合、(b)は左の領域Aに人がいる場合、(c)は右の領域Cに人がいる場合である。
風除け無し選択時の左右風向の設定は、人がいる領域方向に吹出気流を向けるように、各左右羽根8の角度を設定する。
例えば、正面の領域Bに人がいる(a1)あるいは(a2)の場合では、左羽根ユニット8aと右羽根ユニット8cは内向き35度の角度に設定し、中央羽根ユニット8bは正面向き0度に設定する。これによって、領域Bの正面方向への吹出気流の開口幅が絞られて、人がいる領域Bに吹出気流を集中させることが可能となり、人がいる領域に空調範囲を限定したより効率の良い空調を行うことができる。
また、(b)の領域Aに人がいる場合は、左羽根ユニット8aと中央羽根ユニット8bは左向き35度の角度に設定し、右羽根ユニット8cは左向き50度に設定する。これによって、領域Aに向かう左方向への吹出気流の開口幅が絞られて、人がいる領域Aに吹出気流を集中させることが可能となり、人がいる領域に空調範囲を限定したより効率の良い空調を行うことができる。
なお、(c)の領域Cに人がいる場合は、人がいる領域が左右逆である(b)の場合と同様なので説明は省略する。
一方、風除け有り選択時の左右風向の設定は、人がいない各領域方向に吹出気流を向けるように、各左右羽根8の角度を設定する。
例えば、(a1)のように、正面の領域Bに人がいて、人がいる領域Bに隣接する二つの領域A,Cに人がいない場合で、さらに、人がいない領域Aの領域特性は生活区分I、人がいない領域Cの領域特性は生活区分IIの場合について説明する。この場合、人がいる領域Bに隣接する人がいない二つの領域A,Cにおける生活区分を比較し、人がいる頻度がより高い領域Aの方向への吹出気流は、人がいる頻度がより低い領域Cの方向への吹出気流よりも、吹出口の開口比率が大きくなるように左羽根ユニット8aと中央羽根ユニット8bは左向き35度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定する。これによって、領域Aと領域Cへの吹出気流の風量の比率を約2:1に分配することが可能となり、人がいない領域の中でも人がいる頻度が高い領域を優先的に空調することで、人に対する風除けを行うとともに、人がいる可能性が低い領域に対する無駄な空調を減らしてより効率の良い空調を行うことができる。
また、(a2)のように、正面の領域Bに人がいて、人がいる領域Bに隣接する二つの領域A,Cに人がいない場合で、さらに、人がいない二つの領域A,Cの領域特性が同じ場合、左羽根ユニット8aは左向き35度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定するとともに、中央羽根ユニット8bは、左向き35度の角度と右向き35度の角度との間でスイング(揺動)動作するように設定する。この場合の中央羽根ユニット8bは、領域Aに所定時間固定された後、領域Cの方向に揺動して領域Cに所定時間固定され、その後領域Aの方向に揺動して領域Aに所定時間固定されるという動作を繰り返す。なお、風向移動時は、正面の領域Bにいる人に風が当たらないように、上下羽根6の風向を水平かやや上向きに設定する。これによって、領域Aと領域Cへの吹出気流の風量の比率を約1:1に分配することが可能となり、人がいる領域Bの快適性をできるだけ損なわないように人に対する風除けを行うことができる。
また、例えば(b)のように、左の領域Aに人がいて、人がいる領域Aに隣接する(隣接度が高い)領域Bと隣接しない(隣接度が低い)領域Cに人がいない場合で、さらに、人がいない領域Bの領域特性は生活区分II、人がいない領域Cの領域特性は生活区分Iの場合について説明する。この場合、人がいる領域Aの快適性を優先し、複数の人がいない領域B,Cの中で、領域特性に関係なく、人がいる領域Aに隣接する領域Bを優先的に空調する。人がいる領域Aに隣接する領域Bへの吹出気流は、隣接しない領域Cの方向への吹出気流よりも、吹出口の開口比率が大きくなるように左羽根ユニット8aと中央羽根ユニット8bは正面向き0度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定する。これによって、領域Bと領域Cへの吹出気流の風量の比率を約2:1に分配することが可能となり、人がいない領域B,Cの中でも人がいる領域Aに隣接する領域Bを優先的に空調することで、人がいる領域Aの快適性をできるだけ損なわないように人に対する風除けを行うとともに、人がいる領域Aから離れた領域Cへの無駄な空調を減らしてより効率の良い空調を行うことができる。なお、この風量比率の分配は、領域Bが非生活領域(生活区分III)の場合も同じである。
また、例えば(c)のように、右の領域Cに人がいて、人がいる領域Cに隣接する領域Bと隣接しない領域Aに人がいない場合で、さらに、人がいない領域Bの領域特性は生活区分II、人がいない領域Aの領域特性は生活区分IIIの場合について説明する。この場合、領域Aは、人がいる領域Cに隣接せず、さらに生活区分III(=非生活領域)のため、領域Aへは吹出気流を向けずに、人がいる領域Cに隣接し、且つ生活領域である領域Bに風量を100%分配するように左右羽根8の角度を設定する。これによって、人に対する風除けを行うとともに、非生活領域への無駄な空調を減らしてより効率の良い空調を行うことができる。
なお、空調すべき領域を四つ以上に分割し、人がいると判定された領域が一つの場合も略同様に制御され、人がいる領域と、人がいる領域に隣接する二つの領域あるいは人がいる領域に対し隣接度の異なる二つの領域に着目して左右羽根8の風向制御は行われる。
次に、人がいると判定された領域が二つの場合、左右羽根8は基本的に次のように制御される。
(1)風除け選択手段により「風除け無し」が選択された場合
この場合の左右羽根8の風向制御は、人がいる各領域方向に吹出気流を向けるように、各左右羽根8の角度を設定する。吹出気流の風量比率は、人がいる各領域の領域特性あるいは活動量に応じて行われる。
(i)二つの領域における人の活動量が同じ場合
・人のいる頻度が高い領域の風量が人のいる頻度が低い領域の風量より多くなるように左右羽根8を制御する。
・人のいる頻度が同じ場合には、複数の領域の風量が同じになるように左右羽根8を制御する。
(ii)二つの領域における人の活動量が異なる場合
・冷房時:活動量の大きい領域の風量が活動量の小さい領域の風量より多くなるように左右羽根8を制御する。
・暖房時:活動量の大きい領域の風量が活動量の小さい領域の風量より少なくなるように左右羽根8を制御する。
(iii)二つの領域における人の活動量及び領域特性が共に異なる場合
・活動量を優先して前記(ii)のように左右羽根8を制御する。
(2)風除け選択手段により「風除け有り」が選択された場合
・全ての左右羽根8は人がいない領域に向くように制御される。
次に、その具体例を図33及び図34を参照しながら詳述する。
図33及び図34は、人がいると判定された領域が二つの場合における、風除け無しの場合と風除け有りの場合の左右羽根8の風向角度の設定の一例を示している。図33の(d1)及び(d2)は左の領域Aと右の領域Cに人がいる場合、図34の(e1)及び(e2)は正面の領域Bと右の領域Cに人がいる場合、(f)は左の領域Aと正面の領域Bに人がいる場合である。
風除け無し選択時として、例えば(d1)のように、左の領域Aと右の領域Cに人がいて、正面の領域Bに人がいない場合で、さらに、人がいる二つの領域A,Cの活動量は同じで領域特性が異なる場合(人がいる領域Aの領域特性が生活区分I、人がいる領域Cの領域特性が生活区分IIの場合)について説明する。この場合、人がいる二つの領域A,Cにおける領域特性を比較し、領域特性の数値がより小さい(=人がいる頻度が高い)領域Aの方向への吹出気流は、領域特性の数値がより大きい(=人がいる頻度が低い)領域Cの方向への吹出気流よりも、吹出口の開口比率が大きくなるように、左羽根ユニット8aと中央羽根ユニット8bは左向き35度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定する。これによって、領域Aと領域Cへの吹出気流の風量の比率を約2:1に分配することが可能となり、人がいる領域A,Cの中でも頻度が高い領域Aを優先的に空調することで、滞在時間が長いと推定される人には空調配分を多くし、逆に滞在時間が短いと推定される人には空調配分を少なくすることで、各領域での各々の滞在時間に合わせた無駄のない快適な空調を行うことができる。
また、例えば(d2)のように、人がいる二つの領域A,Cの活動量及び領域特性が共に同じ場合、左羽根ユニット8aは左向き35度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定するとともに、中央羽根ユニット8bは、左向き35度の角度と右向き35度の角度との間でスイング(揺動)動作するように設定する。この場合の中央羽根ユニット8bは、領域Aに所定時間固定された後、領域Cの方向に揺動して領域Cに所定時間固定され、その後領域Aの方向に揺動して領域Aに所定時間固定されるという動作を繰り返す。これによって、領域Aと領域Cへの吹出気流の風量の比率を約1:1に分配することが可能となり、人がいる領域A,Cの快適性をできるだけ損なわないように無駄のない快適な空調を行うことができる。
なお、(e2)のように、人がいる二つの領域B,Cが隣接し、活動量及び領域特性が共に同じ場合も左右羽根8は同様に制御され、左羽根ユニット8aは正面向き0度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定するとともに、中央羽根ユニット8bは、正面向き0度の角度と右向き35度の角度との間でスイング(揺動)動作するように設定する。
また、例えば(e1)のように、正面の領域Bと右の領域Cに人がいて、左の領域Aに人がいない場合で、さらに、人がいる二つの領域B,Cの領域特性は同じで活動量が異なる場合(人がいる領域Bの活動量が安静、人がいる領域Cの活動量が中の場合)について説明する。この場合、人がいる二つの領域B,Cにおける活動量を比較し、冷房時は、活動量がより大きい領域Cの方向への吹出気流は、活動量がより小さい領域Bの方向への吹出気流よりも、吹出口の開口比率が大きくなるように、左羽根ユニット8aは正面向き0度の角度に設定し、中央羽根ユニット8bと右羽根ユニット8cは右向き35度の角度に設定する。これによって、領域Bと領域Cへの吹出気流の風量の比率を約1:2に分配することが可能となり、人がいる領域B,Cの中でも活動量がより大きい領域Cを優先的に空調することで、活動量が大きくてより暑く感じる人には空調配分を多くし、逆に活動量が小さくてより涼しく感じる人には空調配分を少なくすることで、各領域での各々の人の活動状態に合わせたより快適な空調を行うことができる。
なお、暖房時は、冷房時とは逆で、活動量がより大きい領域Cの方向への吹出気流は、活動量がより小さい領域Bの方向への吹出気流よりも、吹出口の開口比率が小さくなるように、左羽根ユニット8aと中央羽根ユニット8bは正面向き0度の角度に設定し、右羽根ユニット8cは右向き35度の角度に設定して、領域Bと領域Cへの吹出気流の風量の比率を約2:1に分配することにより、人がいる領域B,Cの中で活動量がより小さい領域Bを優先的に空調する。
また、例えば(f)のように、左の領域Aと正面の領域Bに人がいて、右の領域Cに人がいない場合で、さらに、人がいる二つの領域A,Bの領域特性と活動量が共に異なる場合(人がいる領域Aの活動量が小で領域特性がI、人がいる領域Bの活動量が中で領域特性がIIの場合)について説明する。この場合、領域Bは領域Aよりも、活動量が大きく、領域特性は小さい。つまり、活動量での優先順位では領域Bの方が優先度は高く、領域特性での優先順位では領域Aの方が優先度は高くなる。このように活動量と領域特性で優先順位が異なる場合は、現在の暑さ寒さを反映する活動量を優先して吹出気流の風量配分を決定する。冷房時は、活動量がより大きい領域Bの方向への吹出気流は、活動量がより小さい領域Aの方向への吹出気流よりも、吹出口の開口比率が大きくなるように、左羽根ユニット8aは左向き35度の角度に設定し、中央羽根ユニット8bと右羽根ユニット8cは正面向き0度の角度に設定する。これによって、領域Aと領域Bへの吹出気流の風量の比率を約1:2に分配することが可能となり、各領域での各々の人の活動状態に合わせたより快適な空調を行うことができる。
なお、暖房時は、(e1)の場合と同様、人がいる領域A,Bの中で活動量がより小さい領域Aを優先的に空調する。
次に、人がいると判定された領域が二つで、風除け有りの場合の左右羽根8の風向制御は、人がいない領域方向に吹出気流を向けるように、各左右羽根8の角度を設定する。
この場合の左右羽根8の風向制御を、(e1)のように正面の領域Bと右の領域Cに人がいて、左の領域Aに人がいない場合を例にとって説明する。(e1)の場合には、左羽根ユニット8aと中央羽根ユニット8bは左向き35度の角度に設定し、右羽根ユニット8cは左向き50度に設定する。これによって、領域Aに向かう左方向への吹出気流の開口幅が絞られて、人がいない領域Aに吹出気流を集中させることが可能となり、人がいる領域には吹出気流が当たらないので人への風除けを確実に行うことができ、より快適な空調運転を達成することができる。
なお、(d1)、(d2)、(e2)、(f)の場合も同様に、人がいない領域に吹出気流を集中させるように左右羽根8は角度設定される。
空調すべき領域を四つ以上に分割し、人がいると判定された領域が二つの場合も略同様に制御される。すなわち、人がいる二つの領域が互いに隣接する場合、例えば人がいる二つの領域と、これらの領域に隣接する一つの領域に着目して左右羽根8の風向制御は行われ、人がいる二つの領域が互いに隣接しない場合、例えば人がいる二つの領域と、これらの領域の間に位置する一つの領域に着目して左右羽根8の風向制御は行われる。
なお、人がいると判定された領域が三つの場合、風除け無しの場合は左、中央、右に分離した各エリアの左右羽根8をそれぞれ各領域に向けて制御する一方、風除け有りの場合は各エリアの左右羽根8をそれぞれ各領域に向けた状態で、上下羽根6を上向きに設定する。また、空調すべき領域を四つ以上に分割し、人がいると判定された領域が三つの場合、風除け無しの場合は左、中央、右に分離した各エリアの左右羽根8をそれぞれ各領域に向けて制御する一方、風除け有りの場合は各エリアの左右羽根8を人がいない領域に吹出気流を集中させるように左右羽根8は角度設定される。
次に、送風ファン3の回転数制御については、例えば次のように空調を行う各領域A〜Cに応じて各領域の回転数が設定される。
領域B :400rpm(暖房時)、300rpm(冷房時)
領域A,C:450rpm(暖房時)、350rpm(冷房時)
ここで、各領域における室内機からの距離、室内機正面からの角度、高低差等、室内機との位置関係を表す表現として、相対位置という表現を導入する。
また、各領域において空調がし易い、空調がし難い度合いを空調要求度という表現により表し、空調要求度が高いほど空調がよりし難い、空調要求度が低いほど空調がよりし易いとする。例えば、室内機からの距離が遠いほど吹き出し空気が届き難く空調がし難いので空調要求度は高くなる。すなわち、空調要求度と室内機からの相対位置には密接な関連性があり、本実施の形態では、室内機からの左右角度に関連した相対位置に応じて空調要求度を定める。
つまり、各領域A〜Cの空調を行う場合の送風ファン3の設定回転数は、空調要求度が高いほど高く設定される。すなわち、正面より左右にずれた領域ほど送風ファン3の設定回転数は高く設定される。また、空調すべき領域が一つの場合、その領域の設定回転数(風量)に設定され、空調すべき領域が複数の場合、空調要求度が高い領域の設定回転数に設定される。
以上、左右羽根8の風向制御及び送風ファン3の回転数制御について説明したが、図21(b)に示されるように、居室99が横長の長方形で、室内機が短辺となる壁面に設置された場合において、センサユニット12を図22の(a)に示される状態から(b)に示される状態に90度回転させた場合の上下羽根6の風向制御及び送風ファン3の回転数制御について説明する。
図22のセンサユニット回転機構を設けた場合、上下羽根6及び左右羽根8の風向制御と送風ファン3の回転数制御を司る制御プログラムは二つ用意されており、図22(a)の状態では上述した制御を行う第1の制御プログラムが作動し、図22(a)の状態から90度回転させた図22(b)の状態では、センサ取付台16を回転することにより第1の制御プログラムから以下に説明する制御を司る第2の制御プログラムに切り替わる。
この場合の上下羽根6の風向制御については、暖房時の風除け無し選択時は、足元を暖めるため人がいる領域の前縁(室内機側の縁部)を狙って上下羽根6の角度を設定し、風除け有り選択時は温風が直接身体にあたらないように上向きに設定する。冷房時の風除け無し選択時は人の上半身を狙って上下羽根6の角度を水平からやや下向きに設定し、風除け有り選択時は冷風が直接身体に当たらないように上向きに設定する。
また、全ての左右羽根8は人がいる領域に向くように制御される。
上下羽根6の場合、複数の上下羽根6を一体的に上下に揺動させてもよく、3枚の上下羽根6で構成して、上方の上下羽根6と中央の上下羽根6と下方の上下羽根6をそれぞれ独立して揺動させることもできる。
まず、複数の上下羽根6を一体的に上下に揺動させる場合の風向制御について説明する。
人がいると判定された領域が一つの場合、上下羽根6は次のように制御される。
(1)風除け選択手段により「風除け無し」が選択された場合
・冷房時:上下羽根6は水平からやや下向きに制御される。
・暖房時:上下羽根6は人がいる領域の前縁を狙って制御される。
(2)風除け選択手段により「風除け有り」が選択された場合
・人がいる領域及び冷暖房に関係なく上下羽根6は上向きに制御される。
また、人がいると判定された領域が二つ以上の場合、上下羽根6は次のように制御される。
(1)風除け選択手段により「風除け無し」が選択された場合
・暖房時:上下羽根6は人がいる二つ以上の領域のうち室内機に近い領域の前縁を狙って制御される。
・冷房時:上下羽根6は水平からやや下向きに制御される。
(2)風除け選択手段により「風除け有り」が選択された場合
・人がいる領域及び冷暖房に関係なく上下羽根6は上向きに制御される。
次に、上下羽根6を3枚の上下羽根6で構成して、上方の上下羽根6と中央の上下羽根6と下方の上下羽根6をそれぞれ独立して揺動させる場合の風向制御について説明する。
人がいると判定された領域が一つの場合、各上下羽根6は、複数の上下羽根6を一体的に上下に揺動させる構成と同じように制御される。
人がいると判定された領域が二つの場合、各上下羽根6は次のように制御される。
(1)風除け選択手段により「風除け無し」が選択された場合
この場合の上下羽根6の風向制御は、人がいる各領域方向に吹出気流を向けるように、その角度を設定する。吹出気流の風量比率は、人がいる各領域の領域特性あるいは活動量に応じて行われる。
(i)二つの領域における人の活動量が同じ場合
・人のいる頻度が高い領域の風量が人のいる頻度が低い領域の風量より多くなるように上下羽根6を制御する。
・二つの領域における人のいる頻度が同じ場合には、室内機に近い領域を狙って中央及び下方の上下羽根6を制御するとともに、室内機から遠い領域を狙って上方の上下羽根6を制御する。
(ii)二つの領域における人の活動量が異なる場合
・冷房時:活動量の大きい領域の風量が活動量の小さい領域の風量より多くなるように上下羽根6を制御する。
・暖房時:活動量の大きい領域の風量が活動量の小さい領域の風量より少なくなるように上下羽根6を制御する。
(iii)二つの領域における人の活動量及び領域特性が共に異なる場合
・活動量を優先して前記(ii)のように上下羽根6を制御する。
(2)風除け選択手段により「風除け有り」が選択された場合
・人がいる領域及び冷暖房に関係なく上下羽根6は上向きに制御される。
人がいると判定された領域が三つの場合、各上下羽根6は次のように制御される。
(1)風除け選択手段により「風除け無し」が選択された場合
この場合の上下羽根6の風向制御は、人がいる各領域方向に吹出気流を向けるように、その角度を設定する。すなわち、室内機に近い領域を狙って下方の上下羽根6を制御し、中央の領域を狙って中央の上下羽根6を制御するとともに、室内機から遠い領域を狙って上方の上下羽根6を制御する。
(2)風除け選択手段により「風除け有り」が選択された場合
・上下羽根6は上向きに制御される。
次に、送風ファン3の回転数制御については、例えば下記のように、空調を行う各領域に応じて各領域の回転数が設定される。
室内機に近い領域: 800rpm(暖房時)、600rpm(冷房時)
中央の領域: 1000rpm(暖房時)、720rpm(冷房時)
室内機から遠い領域:1200rpm(暖房時)、850rpm(冷房時)
ここで、左右羽根8の配置、形状等についてさらに説明する。
上述したように、左右羽根8の角度を適宜設定して、室内機からの領域Aと領域Cへの吹出気流の風量比率を約2:1、約1:1等に分配できるが、左右羽根8を傾けると、左右羽根8が抵抗となり、吹出風量が減少する。
そこで、図35に示されるように、中央羽根ユニット8bの回転軸8b1の位置を左羽根ユニット8aの回転軸8a1及び右羽根ユニット8cの回転軸8c1の位置より前方に出すことにより、左右羽根8を傾けた場合の左羽根ユニット8a(あるいは右羽根ユニット8c)と中央羽根ユニット8bとの間隔Bが、中央羽根ユニット8bの回転軸8b1を左羽根ユニット8aの回転軸8a1及び右羽根ユニット8cの回転軸8c1と横方向に一直線上に配置した場合の間隔Aより大きく取れる。その結果、左右羽根8が傾いても風路幅を広く取ることができ、風量減少を抑えることができる。
一方、その場合の右羽根ユニット8cと中央羽根ユニット8bとの間隔は、狭くなるので、この間隙から洩れて左方向にも右方向にも吹出方向を制御されない吹出気流を減らすこともできる。
また、吹出口5から空気が吹き出されると、吹出口5の両側にある側壁5aが抵抗となり、中央羽根ユニット8bのある中央部の方が空気の速度が速くなる。また、空気は吹出速度が速いほど、左右羽根8で吹き出し角度を変更しようとしても曲がりにくくなる。
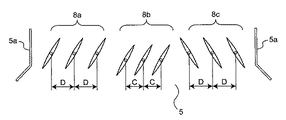
そこで、図36に示されるように、中央羽根ユニット8bの羽根間の間隔(ピッチ)Cを、左羽根ユニット8a及び右羽根ユニット8cの羽根間の間隔(ピッチ)Dより小さく設定することで、中央羽根ユニット8bを通過する吹き出し空気は、左羽根ユニット8a及び右羽根ユニット8cを通過する吹き出し空気より抵抗が大きくなり、前者の吹き出し速度が若干減少することで空気が曲がり易くなる。
また、図37に示されるように、左羽根ユニット8a及び右羽根ユニット8cの左右羽根の両面を内側に凸となるように湾曲させてもよい。すなわち、左羽根ユニット8aの左右羽根を左側に、右羽根ユニット8cの左右羽根を右側に湾曲させることで、左方向及び右方向への気流の変更をより容易に行うことができる。なお、中央羽根ユニット8bの羽根形状は、平板状でもよく、両側に凸状面を持つ形状であってもよい。
さらに、図38に示されるように、左羽根ユニット8aと右羽根ユニット8cの左右羽根を湾曲させることに加えて、中央羽根ユニット8bの左側の左右羽根は左側に、右側の左右羽根は右側にそれぞれ湾曲させると、左右方向への気流変更をさらに容易に行うことができる。なお、中央羽根ユニット8bが奇数枚の左右羽根で構成されている場合、中央の左右羽根を除き、その左側に位置する左右羽根を左側に、右側に位置する左右羽根を右側にそれぞれ湾曲させればよい。
図39の例は、中央羽根ユニット8bを4枚の左右羽根で構成しており、この場合、中央羽根ユニット8bの左側2枚の左右羽根は左側に、右側2枚の左右羽根は右側にそれぞれ湾曲させると、左右方向への気流変更を容易に行うことができる。なお、中央羽根ユニット8bが偶数枚の左右羽根で構成されている場合、中央より左側に位置する左右羽根を左側に、右側に位置する左右羽根を右側にそれぞれ湾曲させればよい。
また、図40に示されるように、中央羽根ユニット8bの羽根枚数が偶数の場合、左側半分に位置する左右羽根を連結桟18で連結し、右側半分に位置する左右羽根を連結桟19で連結し、それぞれを駆動装置(図示せず)に接続して、中央羽根ユニット8bの左右羽根を左右半分ずつ独立して角度変更できるようにしたものである。
この構成は、左羽根ユニット8aを左方向、中央羽根ユニット8bの左半分を左側、右羽根ユニット8cを右方向、中央羽根ユニット8bの右半分を右側に向けることにより、左右に吹き出す風量を1:1の均等に吹き出すことができ、且つ、左羽根ユニット8aを左方向、中央羽根ユニット8bは左半分、右半分共に左側、右羽根ユニット8cを右方向に向けることにより、左側に吹き出す風量と右側に吹き出す風量を約2:1に吹き分けることができる。この時、左右羽根の形状は、図40に示されるように、中央より左側に位置する左右羽根を左側に、右側に位置する左右羽根を右側にそれぞれ湾曲しているほうが、左右に風を変更し易いが、平板状であっても、両側に凸状面を持つ形状であってもよい。
なお、左羽根ユニット8a、中央羽根ユニット8b、右羽根ユニット8cの角度変更は、筐体1内に組み込まれた電子制御装置(図示せず)の指示で駆動モーター10が設定されたゼロ点より指示角度だけ回転することにより行われる。このため、空気調和機が運転を開始する時に、左右羽根は一旦ゼロ点にセットするイニシャライズを行い、指示された位置に回転する制御となっている。
しかしながら、空気調和機が停止し、さらに人の手によって左右羽根の角度を変えられたような場合、運転再開時イニシャライズしようとすると左右羽根同士が接触してゼロ点にセットできない場合がある。例えば、図1に示される室内機において、空気調和機の運転中は吹出口5を開放し、停止中は吹出口5を閉止するための可動前面パネル(図示せず)を設けるとともに、図35に示されるように、中央羽根ユニット8bの回転軸8b1の位置を左羽根ユニット8aの回転軸8a1及び右羽根ユニット8cの回転軸8c1の位置より前方に出した場合、中央羽根ユニット8bの左右羽根の回転範囲を左右対称(例えば、±35°)に設定すると、中央羽根ユニット8bを右方向あるいは左方向に最大限傾けても、停止時の可動前面パネルと衝突する。そこで、中央羽根ユニット8bの左右羽根の左右いずれか一方の最大回転角度を通常時の回転範囲より大きく設定し、空気調和機の停止時には、中央羽根ユニット8bの左右羽根を大きく設定された最大回転角度まで傾くように設定している。このような場合でも、各ユニットの左右羽根の長さや羽根間の間隔(ピッチ)に応じて左右羽根の回転中心の位置を適切に設定しないと、空気調和機の停止後、人の手によって左右羽根の角度が変えられた場合に、3つのユニットを同時にゼロ点にセットすることはできない。したがって、3つのユニットを順次ゼロ点にセットしてゆく必要があり、イニシャライズに時間を要する。
この対策として、図41に示されるように、各ユニットの回転範囲を変え、例えば、左羽根ユニット8aは±50°(回転範囲は左右対称で合計100°)、中央羽根ユニット8bは+80°〜−35°(空気調和機運転時の回転範囲は左右対称で合計70°(±35°)、空気調和機停止時の最大回転角度は+80°)、右羽根ユニット8cは±50°(回転範囲は左右対称で合計100°)の回転範囲に設定するとともに、この回転範囲を超えて左右羽根が回転しないように左右羽根が当接するストッパ(図示せず)を設け、この回転範囲において、左右羽根同士(例えば、左羽根ユニット8aの右側の左右羽根と中央羽根ユニット8bの左側の左右羽根、あるいは中央羽根ユニット8bの右側の左右羽根と右羽根ユニット8cの左側の左右羽根)が接触しない位置に左右羽根の回転中心を設定している。このため、左右羽根がどの位置で停止しても、ゼロ点設定時に3つのユニットを同時に回転できるため、イニシャライズに要する時間を短縮することができる。なお、本実施の形態では、時計方向の回転を(+)、反時計方向の回転を(−)としている。
また、室内機にはタイマーが設けられており、このタイマーを使用して不在検知省エネ制御及び切り忘れ防止制御が行われ、この不在検知省エネ制御及び切り忘れ防止制御について以下説明する。
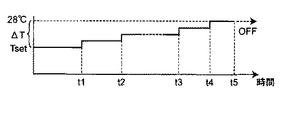
まず、表4及び図42を参照しながら、暖房時の制御について説明する。
図42は温度シフトの一例を示しており、ここでは設定温度Tsetを28℃とし、目標温度(限界値)を20℃とした場合について説明する。なお、ΔTは設定温度Tsetと目標温度との差温である。
センサA,B,Cにより全ての領域A〜Cに人がいないことが検知されると、タイマーがカウントを開始し、タイマーによるカウント開始後、時間t1(例えば、10分)において人の不在が確認されると、2℃(1/4ΔT)だけ設定温度Tsetを自動的に低減する。さらに、時間t2(例えば、カウント開始後30分)において人の不在が確認されると、2℃(1/4ΔT)だけ設定温度Tsetを自動的にさらに低減する。以下、同様に時間t3(例えば、カウント開始後1時間)及び時間t4(例えば、カウント開始後2時間)において人の不在が確認されると、それぞれ2℃(1/4ΔT)だけ設定温度Tsetを自動的に低減する。
時間t4においては、設定温度Tsetより合計8℃低減されて目標温度に等しい20℃になっているので、時間t5(例えば、カウント開始後4時間)までは設定温度Tsetを目標温度のまま維持するが、時間t5においても依然として人の不在が確認されると、空気調和機の運転を停止して、空気調和機の切り忘れを防止する。
なお、時間t1から時間t5までの間に人の存在が検知されると、時間t1以前の設定温度Tsetに復帰させる。
また、温度シフト幅(低減温度)は設定温度Tsetと目標温度との差温ΔTに応じて表4のように設定され、差温ΔTが小さいほど温度シフト幅も小さい。また、設定温度Tsetが目標温度より低い場合は、現状温度に維持されるが、時間t5において人の不在が確認されると、空気調和機の運転を停止するのは図42の例と同じである。
次に、表5及び図43を参照しながら、冷房時の制御について説明する。
図43は温度シフトの一例を示しており、ここでは設定温度Tsetを20℃とし、目標温度(限界値)を28℃とした場合について説明する。なお、ΔTは設定温度Tsetと目標温度との差温である。
センサA,B,Cにより全ての領域A〜Cに人がいないことが検知されると、タイマーがカウントを開始し、タイマーによるカウント開始後、時間t1(例えば、10分)において人の不在が確認されると、2℃(1/4ΔT)だけ設定温度Tsetを自動的に増大する。さらに、時間t2(例えば、カウント開始後30分)において人の不在が確認されると、2℃(1/4ΔT)だけ設定温度Tsetを自動的にさらに増大する。以下、同様に時間t3(例えば、カウント開始後1時間)及び時間t4(例えば、カウント開始後2時間)において人の不在が確認されると、それぞれ2℃(1/4ΔT)だけ設定温度Tsetを自動的に増大する。
時間t4においては、設定温度Tsetより合計8℃増大されて目標温度に等しい28℃になっているので、時間t5(例えば、カウント開始後4時間)までは設定温度Tsetを目標温度のまま維持するが、時間t5においても依然として人の不在が確認されると、空気調和機の運転を停止して、空気調和機の切り忘れを防止する。
なお、時間t1から時間t5までの間に人の存在が検知されると、時間t1以前の設定温度Tsetに復帰させる。
また、温度シフト幅(増大温度)は設定温度Tsetと目標温度との差温ΔTに応じて表5のように設定され、差温ΔTが小さいほど温度シフト幅も小さい。また、設定温度Tsetが目標温度より高い場合は、現状温度に維持されるが、時間t5において人の不在が確認されると、空気調和機の運転を停止するのは図43の例と同じである。
図44は、送風ファン3の風量(回転数)と室外機に設けられた圧縮機の能力を制御することにより省電力運転を達成する例を示している。
すなわち、送風ファン3の風量を増大すると熱交換器6の熱交換効率が向上し、圧縮機の周波数が同じ場合には冷房あるいは暖房能力が増大するので、室内温度を同じ設定温度に保持するためには、圧縮機の周波数を低減することが可能となり、必要な消費電力は減少する。また、不在時に送風ファン3の風量を増大しても気流が強すぎることによる不快感や、送風ファン3の騒音増大による快適性の問題が生じることはない。
図44(a)に示されるように、センサA,B,Cにより全ての領域A〜Cに人がいないことが検知されると、タイマーがカウントを開始し、タイマーによるカウント開始後、時間t1(例えば、10分)において人の不在が確認されると、図44(b)に示されるように、送風ファン3の風量を増大させるとともに、図44(c)に示されるように、圧縮機の周波数を段階的に時間t2(例えば、カウント開始後30分)まで減少させる。時間t1経過後は送風ファン3の風量は一定(限界値)に保持され、時間t2経過後は圧縮機の周波数は一定(限界値)に保持されるが、時間t2、時間t3(例えば、カウント開始後1時間)、時間t4(例えば、カウント開始後2時間)、時間t5(例えば、カウント開始後4時間)において人の不在が継続して確認されると、時間t5において空気調和機の運転を停止して、空気調和機の切り忘れを防止する。
なお、時間t1から時間t5までの間に人の存在が検知されると、時間t1以前の設定風量及び設定周波数に復帰させる。
また、上述した図42乃至図44の例はいずれも、通常運転中、所定時間人がいない場合には、通常運転時より消費電力が少ない省電力運転を行うものであり、その後さらに所定時間人がいない場合には、空気調和機の運転を停止して省エネを達成している(「通常運転」とは、「使用者が指示した運転」)。
さらに、不在が長時間継続しているにもかかわらず、温度変化を惹起するおそれのあるカーテン等の人以外の外乱を人体検知センサが誤検知した場合、不在(無人)状態で通常運転をいつまでも継続することも考えられるので、時間t5より長い所定時間t6(例えば、24時間)経過すると運転を停止することで確実に切り忘れを防止することができる。また、時間t5あるいは時間t5より長い所定時間t6経過後の運転停止直前には本体やリモコンに音声やLEDランプ等で聴覚的あるいは視覚的に報知したり、画面に文字を表示するのが好ましい。さらに、時間t5あるいは時間t5より長い所定時間t6経過後の自動運転停止を行うか否かを選択できる自動停止選択手段をリモコン等に設けると使い勝手が向上する。
上述した不在検知省エネ制御及び切り忘れ防止制御は、室内機に少なくとも一つの人体検知センサを備えた空気調和機であれば、一つの人体検知センサからの出力に応じて不在検知省エネ制御及び切り忘れ防止制御を行うことができる。