JP2010014706A - レーザ車両検出システム - Google Patents
レーザ車両検出システム Download PDFInfo
- Publication number
- JP2010014706A JP2010014706A JP2009116952A JP2009116952A JP2010014706A JP 2010014706 A JP2010014706 A JP 2010014706A JP 2009116952 A JP2009116952 A JP 2009116952A JP 2009116952 A JP2009116952 A JP 2009116952A JP 2010014706 A JP2010014706 A JP 2010014706A
- Authority
- JP
- Japan
- Prior art keywords
- light
- vehicle
- laser
- detection system
- vehicle detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Landscapes
- Traffic Control Systems (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
【解決手段】強度変調後のレーザ光を車両が通過する所定領域に照射する送信光学系を有する投光部と、所定領域に照射されたレーザ光の反射光を収集する受信光学系を有し、収集した反射光に基づいて所定領域の2次元光強度を検出する受光部と、投光部から所定領域に照射されたレーザ光と受光部で検出された2次元光強度との位相差あるいは遅延時間を検出する比較手段9と、比較手段により検出された位相差あるいは遅延時間に基づいて所定領域を通過する車両の3次元的な立体形状を示す距離画像を生成する第1の信号演算部12と、第1の信号演算部で生成された距離画像を画像処理することにより所定領域を通過する車両の特徴量を抽出する第2の信号演算部13とを備える。
【選択図】図1
Description
従来技術は、得られた2次元距離画像から車両判別する方法として、まず立体形状と車両とを関連付けるデータベースを用意しておき、次に、計測した2次元距離画像と該車両データベースとを比較して車種判別をする。しかしながら、このデータベースの具体的なフォーマットや比較方法については、開示も示唆もなされていない。
1)複数種類のセンサ(光路遮蔽検出、踏み板、撮像装置)を用いる必要があり、設置・調整の手間がかかる。
2)各センサ間の依存関係から、保守性が悪く、個別センサのみ入れ替える場合にも、新規設置と同様の調整や設置工事が必要である。
3)2次元検出型のレーザセンサを用いた車両検知・車種判別用のシステムにおいては、単一のレーザセンサを用いた場合には、通過車両による光路遮蔽が発生する。このため、全長・全幅・全高の測定精度が低下し、車種判別における誤検出の発生が避けられない。
図1は、本発明の実施の形態1におけるレーザ車両検出システムの構成図である。
図1におけるレーザ車両検出システムは、光源部4、送受信光学系7、受光部11、および信号処理部16で構成され、信号処理部16による処理結果は、上位装置17に送信される。
本実施の形態2では、レーザ車両検出システムの機器配置、および光源部4の構成例について、具体的に説明する。本実施の形態2におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様である。
本実施の形態3では、レーザ車両検出システムの動作タイミングチャート、受光部11の機器構成と動作例、および信号演算部12における距離計測原理について説明する。本実施の形態3におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様である。

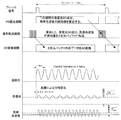
送信光が対象物で反射されて送受信光学系に戻る際に、反射光は、光路長の変化に応じた位相変化を受ける。今、変調周期1/fが、光が距離2Lを伝搬する時間以下となるように(上式(1)参照)設定しているため、伝搬距離の変化ΔLに対する位相変化Δφは、次式(4)で表される。
図4は、本発明の実施の形態3における受光部11の構成ブロック図である。2次元光強度検出器8の各画素において、光検出用のフォトダイオード30で検出された光強度は、トランスインピーダンス増幅器31で電圧信号に変換される。そして、電圧信号に変換された後、分岐して、一方は、強度情報格納用のバッファ35aに格納される。
図5は、本発明の実施の形態3におけるレーザ車両検出システムの受信光路における座標関係を示した図である。図5(a)は、車両進行方向の断面図であり、図5(b)は、車両進行方向に対して垂直な断面図である。座標軸として、(a)の断面と路面方向に平行な方向をx軸とし、(b)の断面と路面方向に平行な方向をy軸とし、路面に対して垂直上向き方向をz軸とする。
本実施の形態4では、レーザ車両検出システムの信号演算部13における特徴量の抽出方法について、具体的に説明する。本実施の形態4におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様である。
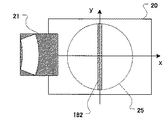
図6は、本発明の実施の形態4における信号演算部13による特徴量(車両進入)検出の説明図である。処理の準備として、信号演算部13は、信号演算部12により算出された、通過車両21の表面形状のxyz3次元データのうち、y方向の投影画像データ(y方向に対して数値積算)61a、61bを算出する(図6の左側に示した(a1)、(b1)参照)。ここで、投影画像データ61aは、通過車両がない場合の積算結果であり、投影画像データ61bは、通過車両が進入してきた場合の積算結果である。
図8は、本発明の実施の形態4における信号演算部13による特徴量(通過車両の全長、全高および軸数)検出の説明図である。図8(a)は、車両全体が受光部視野範囲に入った場合のy方向投影距離画像のフレーム減算データ81を示している。車両の進行により、車両の前方方向エッジ部分82a、82b、82cは、正値を取るのに対して、車両の後方方向エッジ83a、83b、83cは、負値となる減算データが得られる。
図9は、本発明の実施の形態4における信号演算部13による特徴量(通過車両の全幅)検出の説明図である。図9(a)は、車両前端が受光部視野範囲に入った場合のy方向投影距離画像のフレーム減算データ91を示す。車両の進行により、車両の前方方向エッジ部分92a、92bは正値を取るのに対して、車輪後方エッジ93aは負値となる減算データが得られる。
図10は、本発明の実施の形態4における信号演算部13による特徴量(牽引の有無)検出の説明図である。ここでは、通過車両の条件として、牽引車両101a、101bが受光部視野範囲に入り、かつ牽引棒101cが受光視野におけるX方向の中心付近を通過する場合を考える。
まず、信号演算部13は、YZ平面で通過車両の表面形状のxyz3次元データの切り出しデータ108aをy方向に対して投影(y方向に対して数値積算)し、積算プロファイル110を算出する。この積算プロファイルには、路面位置h=0および、高さhがh1<h<h2の範囲内に正値のピークを持つ。ただし、h1は、最小地上高よりも低い位置、h2は、車両の高さよりも低い位置とする。
本実施の形態5では、レーザ車両検出システムの送受信光学系7における、送受信光分離部5と光アンテナ部6の構成例について、詳細に説明する。本実施の形態5におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様である。
本実施の形態6では、レーザ車両検出システムを複数台設置する場合の具体的な運用方法について説明する。本実施の形態6におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様であり、複数のレーザセンサの配置は、先の実施の形態2における図2の構成と同様である。
本実施の形態7では、レーザ車両検出システムを複数台設置する場合の運用方法として、特に低消費電力化に着目して説明する。本実施の形態7におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様であり、複数のレーザセンサの配置は、先の実施の形態2における図2の構成と同様である。
本実施の形態8では、先の実施の形態1で説明した2次元光強度検出器8を、複数の1次元光強度検出器により構成する方法について説明する。本実施の形態8におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1の構成と同様である。
図15は、本発明の実施の形態8における車両長手方向検出領域131での反射光による距離計測データを示した図である。車両の進入により、距離計測データは、表面形状を示す凹凸を持つプロファイル151となる。先の図14と同様に、h0でしきい値処理を行うと、車両の全長を表すプロファイル152が得られる。
図16は、本発明の実施の形態8における車両幅方向検出領域132からの反射光による距離プロファイル162a、162bを示した図である。車両幅検出領域により検出できる距離情報の断面は、破線161を含み紙面に垂直な面となる。
図17は、本発明の実施の形態8における軸数検出方法についての説明図である。先の図16の場合と同様に、車両幅方向検出領域132により、破線161を含み紙面に垂直な面の距離情報が得られる。破線161により切り取られる車両表面の距離情報は、170a、170bのプロファイルとなる。
本実施の形態9では、先の実施の形態8で説明した複数の1次元光強度検出器のうち、車両の長手方向の検出器を取り除いて、車両幅方向の検出器のみで構成する方法について説明する。本実施の形態9におけるレーザ車両検出システムの全体構成は、先の実施の形態1における図1と同じである。
従って、TFとして固定値のフレームレートを仮定すると、X軸方向の1画素の長さΔXは、車両の進入速度に応じて増減する。
Claims (19)
- 強度変調後のレーザ光を車両が通過する所定領域に照射する送信光学系を有する投光部と、
前記所定領域に照射された前記レーザ光の反射光を収集する受信光学系を有し、収集した前記反射光に基づいて前記所定領域の2次元光強度を検出する受光部と、
前記投光部から前記所定領域に照射されたレーザ光と前記受光部で検出された前記2次元光強度との位相差あるいは遅延時間を検出する比較手段と、
前記比較手段により検出された前記位相差あるいは前記遅延時間に基づいて前記所定領域を通過する車両の3次元的な立体形状を示す距離画像を生成する第1の信号演算部と、
前記第1の信号演算部で生成された前記距離画像を画像処理することにより前記所定領域を通過する車両の特徴量を抽出する第2の信号演算部と
を備え、
前記投光部および前記受光部は、車両が通過する前記所定領域に対して固定した位置に設置される
ことを特徴とするレーザ車両検出システム。 - 請求項1に記載のレーザ車両検出システムにおいて、
前記投光部は、変調周波数をf、光速をc、前記投光部と前記所定領域内を通過する車両との最大距離をLとしたときに、f<c/(2L)の関係を満たす変調周波数fで、レーザ光を連続波変調し、前記所定領域に照射することを特徴とするレーザ車両検出システム。 - 請求項2に記載のレーザ車両検出システムにおいて、
前記投光部は、前記レーザ光として、波長1.5μm帯を用いることを特徴とするレーザ車両検出システム。 - 請求項1ないし3のいずれか1項に記載のレーザ車両検出システムにおいて、
前記投光部に含まれる前記送信光学系と前記受光部に含まれる前記受信光学系とを同軸の共用光学系とし、
レーザ光の光源と前記共用光学系との間に、送信光と受信光とを分岐する分離部をさらに備える
ことを特徴とするレーザ車両検出システム。 - 請求項4に記載のレーザ車両検出システムにおいて、
前記共用光学系は、前記所定領域を通過する車両の表面上の1点と前記受光部の光電面上の1点とを結像関係とする受信光学系と、前記受信光学系の視野角よりも広い角度範囲に送信光を投光する送信光学系とを共用することを特徴とするレーザ車両検出システム。 - 請求項4または5に記載のレーザ車両検出システムにおいて、
前記分離部は、光路内に設けられた偏光ビームスプリッタに対して送信光をS偏光で入力して反射ポートに出力させ、前記偏光ビームスプリッタの反射ポートと前記共用光学系との間に設けられた4分の1波長板により円偏光に変換して空間照射し、前記共用光学系により受信した、対象物からの反射光の偏光を、P偏光に変換して前記偏光ビームスプリッタの透過ポートに出力させて受信光路に切り替えることを特徴とするレーザ車両検出システム。 - 請求項4または5に記載のレーザ車両検出システムにおいて、
前記分離部は、光路内に設けられた偏光無依存型ビームスプリッタに対して、送信光を入力し透過ポートあるいは反射ポートからの出力光を、前記共用光学系を介して前記所定領域に照射し、前記共用光学系により受信した、対象物からの反射光を、前記偏光無依存型ビームスプリッタの前記反射ポートあるいは前記透過ポートに出力させて受信光路に導光するとともに、前記光源と前記偏光無依存型ビームスプリッタとの間に光アイソレータを有すること特徴とするレーザ車両検出システム。 - 請求項4または5に記載のレーザ車両検出システムにおいて、
前記分離部は、送信光を直交偏光成分に分離する第1の偏光ビームスプリッタを介して、P偏光、S偏光に対して独立した光路内で2分の1波長板とファラデーローテータとを通過させた後、第2の偏光ビームスプリッタにより合波し、4分の1波長板を介して円偏光に変換した後、前記共用光学系を用いて前記所定領域に照射し、前記共用光学系により受信した、対象物からの反射光を前記第2のビームスプリッタによりP偏光、S偏光の独立光路に分岐した後、前記第1の偏光ビームスプリッタの受信光路へと光路を切り替えることを特徴とするレーザ車両検出システム。 - 請求項1ないし8のいずれかに1項に記載のレーザ車両検出システムにおいて、
前記受光部は、前記所定領域における反射光を独立に受光可能な複数のフォトダイオードを有することを特徴とするレーザ車両検出システム。 - 請求項1ないし9のいずれかに1項に記載のレーザ車両検出システムにおいて、
前記受光部は、収集する前記反射光のうち、波長が前記送信光の波長の近傍の光を透過させ、他の光を反射させるバンドパスフィルタを前記受信光学系の前段に有することを特徴とするレーザ車両検出システム。 - 請求項1ないし10のいずれか1項に記載のレーザ車両検出システムにおいて、
前記比較手段は、前記位相差を検出する際に、前記受光部の各画素からの光強度信号に対して、前記送信光の強度変調後の信号と同一周波数の局部発振信号を各画素ごとに乗算して乗算信号を算出し、前記乗算信号の直流成分から光強度を検出し、前記乗算信号の交流成分の振動振幅の実効値から位相ずれ量を検出することを特徴とするレーザ車両検出システム。 - 請求項1ないし11のいずれか1項に記載のレーザ車両検出システムにおいて、
前記投光部は、前記所定領域を通過する車両の進行方向に対して、両側の斜め上側面の対称位置に設置されることを特徴とするレーザ車両検出システム。 - 請求項1ないし12のいずれか1項に記載のレーザ車両検出システムにおいて、
前記第2の信号演算部は、前記第1の信号演算部により生成された前記距離画像を、車両進行方向であるy方向に垂直な方向に投影したy方向投影距離画像データと、前記y方向投影距離画像のフレーム間の減算データとに基づき、前記特徴量として、進入車両の有無検出、進入車両の速度、進行方向、軸数および車両の全長全高を計測することを特徴とするレーザ車両検出システム。 - 請求項1ないし13のいずれか1項に記載のレーザ車両検出システムにおいて、
前記第2の信号演算部は、前記第1の信号演算部により生成された前記距離画像を、車両進行方向に垂直な方向であるx方向に投影したx方向投影距離画像データに基づき、前記特徴量として、車両の全幅を計測することを特徴とするレーザ車両検出システム。 - 請求項1ないし14のいずれか1項に記載のレーザ車両検出システムにおいて、
前記受光部は、複数の1次元光強度検出器を直交に配置して構成されることを特徴とするレーザ車両検出システム。 - 請求項15に記載のレーザ車両検出システムにおいて、
前記受光部は、車両の進行方向に少なくとも1個の1次元光強度検出器と、車両の進行方向に垂直な方向に少なくとも1個の1次元光強度検出器とを備えることを特徴とするレーザ車両検出システム。 - 請求項1ないし16のいずれか1項に記載のレーザ車両検出システムにおいて、
前記投光部および前記受光部の一対で構成され、かつ、投光部で用いられる変調周波数と受光部で用いられる復調周波数とを一致させた投受光部を複数個用いて異なる位置に設置し、それぞれの投光部で用いられる変調周波数と受光部で用いられる復調周波数とを互いに異なる周波数とすることを特徴とするレーザ車両検出システム。 - 請求項17に記載のレーザ車両検出システムにおいて、
前記2次元光強度に基づいて前記所定領域への車両の進入あるいは車種を特徴量として検出する第3の信号演算部をさらに備え、
複数位置に設置された前記投受光部において、
1台目の投受光部内の投光部は、前記強度変調後のレーザ光を常時照射し、
1台目以外の投受光部内の受光部のそれぞれは、1台目の投受光部内の投光部による照射により得られた2次元光強度に基づいて、前記第3の信号演算部により検出された特徴量に基づいて、自身の投光部の電源投入、停止を制御する
ことを特徴とするレーザ車両検出システム。 - 請求項1ないし14のいずれか1項に記載のレーザ車両検出システムにおいて、
前記第2の信号演算部は、前記第1の信号演算部により生成された前記距離画像から車輪に対応する楕円形状情報を抽出し、抽出した前記楕円形状情報における車両進行方向の長さと車両進行方向に垂直な方向の長さとの比、および画像フレーム時間を用いて、車両進入速度を計測することを特徴とするレーザ車両検出システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009116952A JP5511219B2 (ja) | 2008-06-06 | 2009-05-13 | レーザ車両検出システム |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008149219 | 2008-06-06 | ||
| JP2008149219 | 2008-06-06 | ||
| JP2009116952A JP5511219B2 (ja) | 2008-06-06 | 2009-05-13 | レーザ車両検出システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010014706A true JP2010014706A (ja) | 2010-01-21 |
| JP5511219B2 JP5511219B2 (ja) | 2014-06-04 |
Family
ID=41700928
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009116952A Active JP5511219B2 (ja) | 2008-06-06 | 2009-05-13 | レーザ車両検出システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5511219B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012021883A (ja) * | 2010-07-14 | 2012-02-02 | Toshiba Corp | 車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム |
| EP2463806A1 (en) | 2010-12-08 | 2012-06-13 | Ricoh Company, Ltd. | Vehicle detection device and vehicle detection method |
| WO2013047685A1 (ja) * | 2011-09-29 | 2013-04-04 | 三菱重工業株式会社 | 測定対象物測定装置及びその処理方法とプログラム |
| WO2013047697A1 (ja) * | 2011-09-29 | 2013-04-04 | 三菱重工業株式会社 | 測定対象物測定装置及びその処理方法とプログラム |
| JP2013145493A (ja) * | 2012-01-16 | 2013-07-25 | Mitsubishi Electric Corp | 車種判別システム |
| WO2013130996A1 (en) * | 2012-03-02 | 2013-09-06 | Laser Technology, Inc. | System and method for monitoring vehicular traffic with a laser rangefinding and speed measurement device utilizing a shaped divergent laser beam pattern |
| JP2013190836A (ja) * | 2012-03-12 | 2013-09-26 | Mitsubishi Heavy Ind Ltd | 車両検知システム、車両検知方法、車両検知装置、プログラム、及び記録媒体 |
| JP2014066649A (ja) * | 2012-09-26 | 2014-04-17 | Teraoka Seiko Co Ltd | 寸法測定装置 |
| JP2017097783A (ja) * | 2015-11-27 | 2017-06-01 | 株式会社東芝 | 車種判別装置および車種判別方法 |
| JP2019066933A (ja) * | 2017-09-28 | 2019-04-25 | 三菱重工機械システム株式会社 | 車両検知器、車種判別装置、車両検知方法、車種判別方法、及びプログラム |
| KR20200025247A (ko) * | 2018-08-29 | 2020-03-10 | 주식회사 파킹패스 | 이동차량 추적에 의한 주차 관리장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07151528A (ja) * | 1993-11-26 | 1995-06-16 | Olympus Optical Co Ltd | レンジファインダー |
| JPH07311009A (ja) * | 1994-05-20 | 1995-11-28 | Nikon Corp | 位置検出装置 |
| JPH10105869A (ja) * | 1996-09-30 | 1998-04-24 | Omron Corp | 車種判別装置 |
| JPH11203588A (ja) * | 1998-01-20 | 1999-07-30 | Denso Corp | 車種判別装置 |
| JP2003281686A (ja) * | 2002-03-20 | 2003-10-03 | Mitsubishi Heavy Ind Ltd | 距離画像センサ及び車種判別装置 |
-
2009
- 2009-05-13 JP JP2009116952A patent/JP5511219B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07151528A (ja) * | 1993-11-26 | 1995-06-16 | Olympus Optical Co Ltd | レンジファインダー |
| JPH07311009A (ja) * | 1994-05-20 | 1995-11-28 | Nikon Corp | 位置検出装置 |
| JPH10105869A (ja) * | 1996-09-30 | 1998-04-24 | Omron Corp | 車種判別装置 |
| JPH11203588A (ja) * | 1998-01-20 | 1999-07-30 | Denso Corp | 車種判別装置 |
| JP2003281686A (ja) * | 2002-03-20 | 2003-10-03 | Mitsubishi Heavy Ind Ltd | 距離画像センサ及び車種判別装置 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012021883A (ja) * | 2010-07-14 | 2012-02-02 | Toshiba Corp | 車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム |
| US8908038B2 (en) | 2010-12-08 | 2014-12-09 | Ricoh Company, Ltd. | Vehicle detection device and vehicle detection method |
| EP2463806A1 (en) | 2010-12-08 | 2012-06-13 | Ricoh Company, Ltd. | Vehicle detection device and vehicle detection method |
| WO2013047685A1 (ja) * | 2011-09-29 | 2013-04-04 | 三菱重工業株式会社 | 測定対象物測定装置及びその処理方法とプログラム |
| WO2013047697A1 (ja) * | 2011-09-29 | 2013-04-04 | 三菱重工業株式会社 | 測定対象物測定装置及びその処理方法とプログラム |
| JPWO2013047697A1 (ja) * | 2011-09-29 | 2015-03-26 | 三菱重工業株式会社 | 測定対象物測定装置及びその処理方法とプログラム |
| JP2013145493A (ja) * | 2012-01-16 | 2013-07-25 | Mitsubishi Electric Corp | 車種判別システム |
| WO2013130996A1 (en) * | 2012-03-02 | 2013-09-06 | Laser Technology, Inc. | System and method for monitoring vehicular traffic with a laser rangefinding and speed measurement device utilizing a shaped divergent laser beam pattern |
| US9576484B2 (en) | 2012-03-02 | 2017-02-21 | Laser Technology, Inc. | System and method for monitoring vehicular traffic with a laser rangefinding and speed measurement device utilizing a shaped divergent laser beam pattern |
| JP2013190836A (ja) * | 2012-03-12 | 2013-09-26 | Mitsubishi Heavy Ind Ltd | 車両検知システム、車両検知方法、車両検知装置、プログラム、及び記録媒体 |
| JP2014066649A (ja) * | 2012-09-26 | 2014-04-17 | Teraoka Seiko Co Ltd | 寸法測定装置 |
| JP2017097783A (ja) * | 2015-11-27 | 2017-06-01 | 株式会社東芝 | 車種判別装置および車種判別方法 |
| JP2019066933A (ja) * | 2017-09-28 | 2019-04-25 | 三菱重工機械システム株式会社 | 車両検知器、車種判別装置、車両検知方法、車種判別方法、及びプログラム |
| JP7154744B2 (ja) | 2017-09-28 | 2022-10-18 | 三菱重工機械システム株式会社 | 車種判別装置、車種判別方法、及びプログラム |
| KR20200025247A (ko) * | 2018-08-29 | 2020-03-10 | 주식회사 파킹패스 | 이동차량 추적에 의한 주차 관리장치 |
| KR102140757B1 (ko) | 2018-08-29 | 2020-08-04 | 주식회사 파킹패스 | 이동차량 추적에 의한 주차 관리장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5511219B2 (ja) | 2014-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5511219B2 (ja) | レーザ車両検出システム | |
| US11525916B2 (en) | Techniques for mixing local oscillator signal with target return signal to generate target information | |
| CN108089193B (zh) | 用于确定到目标对象的距离的距离测量方法和模块 | |
| US7193720B2 (en) | Optical vibration imager | |
| US6876441B2 (en) | Optical sensor for distance measurement | |
| US20220308192A1 (en) | Techniques for ghosting mitigation in coherent lidar systems using in-phase/quadrature phase (iq) processing | |
| US11320522B1 (en) | System and method for FMCW LIDAR with DC laser | |
| US11899111B2 (en) | Techniques for identifying true signals in coherent LIDAR systems | |
| EP3455110A1 (en) | Sensing vehicle positions with optical sensors | |
| JP7629091B2 (ja) | Fmcw-lidarシステムにおける検出閾値を自動調整するための技術 | |
| US20240353544A1 (en) | Techniques for using a coherent receiver in a fmcw lidar system | |
| US20220308217A1 (en) | Techniques for ghosting mitigation in coherent lidar systems using multiple chirp rates | |
| US20220397653A1 (en) | Techniques for band specific peak detection in a lidar system | |
| JP2011215003A (ja) | 波面測定方法、波面測定装置および顕微鏡 | |
| JPH0942938A (ja) | 形状測定装置および段差測定装置 | |
| EP4686959A1 (en) | System and method for measuring the range and/or relative velocity to an object | |
| US20240255722A1 (en) | Techniques for alignment of target and local oscillator beams to photodiode detector | |
| JPH06265304A (ja) | ヘテロダイン干渉計 | |
| WO2024142073A1 (en) | System and method for optical range doppler detection | |
| Dasgupta et al. | A Novel Dual Path Detection Approach for Single Pixel FMCW LiDAR Imaging | |
| AU2023415444A1 (en) | System and method for optical range and velocity detection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130305 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130501 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140325 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5511219 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |