JP2009507309A - モデリング言語における物理計量単位 - Google Patents
モデリング言語における物理計量単位 Download PDFInfo
- Publication number
- JP2009507309A JP2009507309A JP2008530149A JP2008530149A JP2009507309A JP 2009507309 A JP2009507309 A JP 2009507309A JP 2008530149 A JP2008530149 A JP 2008530149A JP 2008530149 A JP2008530149 A JP 2008530149A JP 2009507309 A JP2009507309 A JP 2009507309A
- Authority
- JP
- Japan
- Prior art keywords
- measure
- unit
- physical
- units
- modeling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/10—Numerical modelling
Abstract
Description
本願は、その内容を引用して本明細書に援用する2005年9月6日付けの米国特許出願第11/221,191号の利益を主張する。
measure)を提供することに関する。
本発明は、物理システムをモデル化するために固有の計量単位を提供する。すると、これら計量単位を用いて物理システムのモデル化が可能となる。従って、実際の単位は現実世界の測定値を反映しており、モデル化されたシステムで使用且つ伝播させることができ、適切な計量単位を持つ結果を与えることができる。
Computing社から入手可能なSoftWIRE、Visual Solutions社から入手可能なVisSim、Elanix社から入手可能なSystemVIEW、Coreco社から入手可能なWiT、PPT Vision社から入手可能なVision Program Manager、Khoral Research社から入手可能なKhoros、並びにその他多数が含まれるが、それらに限定されない。メモリ4は、例えば、CD-ROM、フロッピー(登録商標)ディスク、テープ装置などの任意適切なインストール媒体や、DRAM、SRAM、EDO RAM、ラムバスRAMなどのコンピュータ・システムメモリ又はランダムアクセスメモリや、ハードドライブ又は光学記憶装置を含む磁気媒体などの不揮発性記憶装置を含むことができる。このメモリは、他の種類のメモリ又はそれらの組合せを含むこともできる。
Workshopは、コード生成に適した実行エンジン6dの一例である。

Claims (28)
- 物理モデリング環境における一方法であって、
前記物理モデリング環境で使用される固有の計量単位を与える段階と、
計量単位を持つ物理システムをモデル化する段階とを含む、方法。 - 前記物理システムの前記モデルの前記計量単位を調べて、該単位が所与の演算に関して互いに適合しているかを判断する段階を更に含む、請求項1に記載の方法。
- 前記計量単位が所与の演算に関して互いに適合していない場合は、通知を生成する段階を更に含む、請求項2に記載の方法。
- 前記不適合性への対処法に関してユーザ入力を要求する、請求項3に記載の方法。
- 前記計量単位は前記モデル化された物理システム内を伝播する、請求項1に記載の方法。
- 前記固有の計量単位はデータベースを介して与えられる、請求項1に記載の方法。
- 前記データベースは、固有の計量単位を追加するためユーザによるカスタマイズが可能である、請求項6に記載の方法。
- 前記データベースは、固有の計量単位を削除するためユーザによるカスタマイズが可能である、請求項6に記載の方法。
- 前記物理システムが、前記物理モデリング環境において少なくとも部分的にグラフィックモデル化される、請求項1に記載の方法。
- 前記計量単位は前記物理システムの前記グラフィックモデルに表示される、請求項9に記載の方法。
- 前記物理システムは、前記物理モデリング環境において少なくとも部分的にテキスト形式でモデル化される、請求項1に記載の方法。
- モデル化している前記物理システムの前記計量単位を、同一の計量単位に変換する段階を更に含む、請求項1に記載の方法。
- 変換のための基本単位は、浮動小数点計算による丸めの誤差を最小化するよう選択される、請求項12に記載の方法。
- 前記物理モデリング環境はMATLAB物理モデリング環境である、請求項1に記載の方法。
- 前記物理モデリング環境はSIMULINK物理モデリング環境である、請求項14に記載の方法。
- 前記モデル化されたシステムからコードを生成する段階を更に含む、請求項1の方法。
- 一方法を実行するため計算装置により実行可能な命令を保持した、該計算装置と共に使用される媒体であって、該方法が、
固有の計量単位を与える段階と、
計量単位を持つ物理システムをモデリングする段階とを含む、方法。 - 前記物理システムの前記モデルの前記計量単位を調べて、該単位が所与の演算に関して互いに適合しているかを判断する段階を更に含む、請求項17に記載の方法。
- 前記計量単位が所与の演算に関して互いに適合していない場合は、通知を生成する段階を更に含む、請求項18に記載の方法。
- 同一基準でない単位への対処法に関してユーザ入力を要求する、請求項19に記載の方法。
- 前記計量単位は前記モデル化された物理システム内を伝播する、請求項17に記載の方法。
- 物理モデリング・アプリケーションを生成し且つ表示するシステムであって、
データを前記物理モデリング・アプリケーションに入力するためのユーザ操作可能な入力手段と、
物理モデルを表示するための表示装置と、
コンピュータプログラム命令とデータを記憶するためのメモリ及び該記憶したコンピュータプログラム命令を実行するためのプロセッサを含むコンピュータ装置とを含み、該コンピュータプログラム命令は、固有の計量単位を与え、固有の計量単位を持つ物理システムをモデリングするための命令を含む、システム。 - グラフィカルモデリング・アプリケーションを生成し且つ表示するシステムであって、
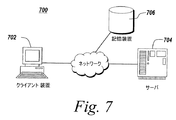
クライアント装置に物理システムをモデリングするための固有の計量単位を与える配布サーバと、
該配布サーバと通信するクライアント装置とを含む、システム。 - 前記クライアント装置は、計量単位を持つ物理システムをモデリングするよう動作可能である、請求項23に記載のシステム。
- 前記クライアント装置が、コンピュータプログラム命令とデータを記憶するためのメモリ及び該記憶したコンピュータプログラム命令を実行するためのプロセッサを含む計算装置であり、該コンピュータプログラム命令は、固有の計量単位を与え、固有の計量単位を持つ物理システムをモデリングするための命令を含む、請求項23に記載のシステム。
- 物理モデリング環境を実行するサーバと、該サーバと通信するクライアント装置とを備えたネットワークにおいて、一方法は、
前記サーバで固有の計量単位を与える段階と、
計量単位を持つ入力を前記サーバで前記クライアントから受け取る段階と、
該計量単位を持つ物理システムをモデリングする段階とを含む、方法。 - 物理モデリング環境における方法であって、
前記物理モデリング環境において使用される固有の計量単位を与える段階と、
計量単位を持つ物理システムのモデルを構築する段階と、
前記物理システムの前記モデルを介して計量単位を伝播させる段階とを含む、方法。 - 物理モデリング環境における方法であって、
前記物理モデリング環境において使用される固有の計量単位を与える段階と、
計量単位を持つ物理システムのモデルを構築する段階と、
前記物理システムの前記モデルの前記計量単位を調べて、該単位が所与の演算に関して互いに適合しているかを判断する段階とを含む、方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/221,191 US7487071B2 (en) | 2005-09-06 | 2005-09-06 | Physical units of measure in modeling languages |
| PCT/US2006/034625 WO2007030482A2 (en) | 2005-09-06 | 2006-09-06 | Physical units of measure in modeling languages |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009507309A true JP2009507309A (ja) | 2009-02-19 |
| JP2009507309A5 JP2009507309A5 (ja) | 2009-10-08 |
Family
ID=37745612
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008530149A Pending JP2009507309A (ja) | 2005-09-06 | 2006-09-06 | モデリング言語における物理計量単位 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US7487071B2 (ja) |
| EP (1) | EP1938230B1 (ja) |
| JP (1) | JP2009507309A (ja) |
| WO (1) | WO2007030482A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014130627A (ja) * | 2014-02-26 | 2014-07-10 | Hitachi Ltd | コントローラ開発ツールとそれを利用して開発したモータドライブシステムを有する機器 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2962800A1 (en) | 2007-05-09 | 2008-11-20 | Lexisnexis Group | Systems and methods for analyzing documents |
| US20090070716A1 (en) * | 2007-09-12 | 2009-03-12 | Joshi Rajiv V | System and method for optimization and predication of variability and yield in integrated ciruits |
| US20090109031A1 (en) | 2007-10-25 | 2009-04-30 | Calvin Duane A | Method of and System for Finding Physical Locations of Servers |
| US9836460B2 (en) | 2010-06-11 | 2017-12-05 | Lexisnexis, A Division Of Reed Elsevier Inc. | Systems and methods for analyzing patent-related documents |
| US9565067B1 (en) | 2014-02-20 | 2017-02-07 | The Mathworks, Inc. | Heterogeneous units management system with dimensionless, ambiguous, and partial units |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0433018A (ja) * | 1990-05-24 | 1992-02-04 | Natl Aerospace Lab | 複合プログラム用入出力データの物理単位系自動変換方式 |
| JPH05158922A (ja) * | 1991-12-05 | 1993-06-25 | Sharp Corp | 情報処理装置 |
| JPH0950432A (ja) * | 1995-08-07 | 1997-02-18 | Fujitsu Ltd | 換算処理機能をもつ文書処理装置および換算処理方法 |
| JPH09259087A (ja) * | 1996-03-26 | 1997-10-03 | N F Kairo Sekkei Block:Kk | 単位変換装置 |
| JP2003323413A (ja) * | 2002-05-01 | 2003-11-14 | Hiroshi Tsuchida | 単位操作機能を持つ数式演算処理プログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6983227B1 (en) * | 1995-01-17 | 2006-01-03 | Intertech Ventures, Ltd. | Virtual models of complex systems |
| US20040068528A1 (en) * | 2002-10-04 | 2004-04-08 | Erickson Ranel Einar | Systems and methods for calculating quantitative problems |
-
2005
- 2005-09-06 US US11/221,191 patent/US7487071B2/en active Active
-
2006
- 2006-09-06 EP EP06824896.2A patent/EP1938230B1/en active Active
- 2006-09-06 WO PCT/US2006/034625 patent/WO2007030482A2/en active Application Filing
- 2006-09-06 JP JP2008530149A patent/JP2009507309A/ja active Pending
-
2007
- 2007-07-24 US US11/881,003 patent/US7624000B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0433018A (ja) * | 1990-05-24 | 1992-02-04 | Natl Aerospace Lab | 複合プログラム用入出力データの物理単位系自動変換方式 |
| JPH05158922A (ja) * | 1991-12-05 | 1993-06-25 | Sharp Corp | 情報処理装置 |
| JPH0950432A (ja) * | 1995-08-07 | 1997-02-18 | Fujitsu Ltd | 換算処理機能をもつ文書処理装置および換算処理方法 |
| JPH09259087A (ja) * | 1996-03-26 | 1997-10-03 | N F Kairo Sekkei Block:Kk | 単位変換装置 |
| JP2003323413A (ja) * | 2002-05-01 | 2003-11-14 | Hiroshi Tsuchida | 単位操作機能を持つ数式演算処理プログラム |
Non-Patent Citations (4)
| Title |
|---|
| CSND199801377012; 臼田 昭司: '日本語対応で活用範囲が広がる!Mathcad 7-基礎から応用ミニ解説-' TRY!PC , 19980501, pp.115-123, CQ出版株式会社 * |
| JPN6012004492; Cristian Domnisoru: 'Using MATHCAD in Teaching Power Engineering' IEEE Transactions on Education Vol.48 No.1, 200502, pp.157-161 * |
| JPN6012004493; Iztok Humar et al: 'Mathematical tools for supporting Web-based education of electromagnetics' Proceedings of the Fifth International Conference on Information Technology Based Higher Education a , 200406, pp.111-116 * |
| JPN6012004494; 臼田 昭司: '日本語対応で活用範囲が広がる!Mathcad 7-基礎から応用ミニ解説-' TRY!PC , 19980501, pp.115-123, CQ出版株式会社 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014130627A (ja) * | 2014-02-26 | 2014-07-10 | Hitachi Ltd | コントローラ開発ツールとそれを利用して開発したモータドライブシステムを有する機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1938230A2 (en) | 2008-07-02 |
| US7487071B2 (en) | 2009-02-03 |
| US7624000B2 (en) | 2009-11-24 |
| US20070055485A1 (en) | 2007-03-08 |
| WO2007030482A2 (en) | 2007-03-15 |
| EP1938230B1 (en) | 2016-04-13 |
| US20070271076A1 (en) | 2007-11-22 |
| WO2007030482A3 (en) | 2007-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Fritzson et al. | Modelica-a general object-oriented language for continuous and discrete-event system modeling and simulation | |
| US7849440B1 (en) | Real-time code preview for a model based development process | |
| Estefan | Survey of model-based systems engineering (MBSE) methodologies | |
| Albin | The art of software architecture: design methods and techniques | |
| Karban et al. | Creating system engineering products with executable models in a model-based engineering environment | |
| US8046735B1 (en) | Transforming graphical objects in a graphical modeling environment | |
| US8055995B2 (en) | System and method of defining a hierarchical datamodel and related computation and instruction rules using spreadsheet like user interface | |
| Camus et al. | Co-simulation of cyber-physical systems using a DEVS wrapping strategy in the MECSYCO middleware | |
| JP2009507309A (ja) | モデリング言語における物理計量単位 | |
| Huang et al. | An improved decomposition scheme for assessing the reliability of embedded systems by using dynamic fault trees | |
| Götzinger et al. | Rosa: A framework for modeling self-awareness in cyber-physical systems | |
| Smith et al. | A document-driven method for certifying scientific computing software for use in nuclear safety analysis | |
| Ye et al. | Uncertainty quantification patterns for multiscale models | |
| Ali et al. | Technique for early reliability prediction of software components using behaviour models | |
| US10817629B2 (en) | Discretization of a model of a system or a portion of the model using system inputs and outputs | |
| Long et al. | Assessing lifecycle value using object-based modeling by incorporating excess and changeability | |
| Yu et al. | Adaptive first-crossing approach for life-cycle reliability analysis | |
| Xiao et al. | Semantic characterization of programmable logic controller programs | |
| CN112990256A (zh) | 多传感器噪声计算方法及信息融合方法、存储介质及设备 | |
| Kaalen et al. | Branching transitions for semi-Markov processes with application to safety-critical systems | |
| Bentz et al. | Information based design environment | |
| Segalman et al. | A robust approach to quantification of margin and uncertainty | |
| US20140012551A1 (en) | System and Method for Determining Thermodynamic Parameters | |
| Rafiev et al. | ArchOn: Architecture-open resource-driven cross-layer modelling framework | |
| Drozd et al. | Internet of Things for Industry and Human Applications. Simulation of Internet of Things based Systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090818 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120131 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120427 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120509 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120530 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120606 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120629 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120706 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120720 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130415 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130422 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130510 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130827 |