JP2009501344A - 所在及び在庫追跡のための過去エラー自動補正 - Google Patents
所在及び在庫追跡のための過去エラー自動補正 Download PDFInfo
- Publication number
- JP2009501344A JP2009501344A JP2008533334A JP2008533334A JP2009501344A JP 2009501344 A JP2009501344 A JP 2009501344A JP 2008533334 A JP2008533334 A JP 2008533334A JP 2008533334 A JP2008533334 A JP 2008533334A JP 2009501344 A JP2009501344 A JP 2009501344A
- Authority
- JP
- Japan
- Prior art keywords
- data
- trajectory
- position data
- real
- movable object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/393—Trajectory determination or predictive tracking, e.g. Kalman filtering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/49—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an inertial position system, e.g. loosely-coupled
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Economics (AREA)
- Human Resources & Organizations (AREA)
- Entrepreneurship & Innovation (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Strategic Management (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Theoretical Computer Science (AREA)
- Development Economics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
Description
2005年7月5日出願の米国仮特許出願第60/696,619号、Han-Shue Tan他による「所在及び在庫追跡のための過去エラー自動補正」(代理人事件番号TRAC−01000US0TAW)に対する優先権を主張する。
本発明は、船舶、鉄道車両、又はトラックによって運搬され、又は貨物置場に保管されているコンテナの所在を追跡することに関する。より具体的には、本発明は、衛星利用全地球測位システム(GPS)と慣性航法システム(INS)を使用したコンテナの追跡と在庫に関する。INSは、慣性センサ、速度センサ、及び回転又は移動方向を示すセンサをGPSと組み合わせた合体型に置き換え又はそれにより支援されていてもよい。
Claims (16)
- 位置追跡システムにおいて、
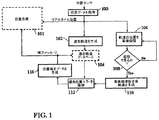
可動対象物の第1位置データを提供するために前記可動対象物に関係付けられた測位ユニットであって、前記対象物の動きを示す第1リアルタイム軌道を提供することができるようにする、測位ユニットと、
前記第1位置データを記憶するためのデータ記憶ユニットと、
前記第1位置データから較正後第2軌道データを生成するための航法処理モジュールと、
前記航法処理モジュールからの前記第2較正後軌道データを、前記第1軌道データと比較して、前記第1位置データ中の補正を表す補正データを生成するためのエラー補正計算モジュールと、を備えている追跡システム。 - 前記データ記憶ユニットに記憶されている前記第1位置エラーのデータエラーの場所を表すメッセージを提供するための、前記エラー補正モジュールに接続されている報告モジュールを更に備えている、請求項1に記載のシステム。
- 前記測位ユニットは、
前記第1位置データを求めるために、前記可動対象物のリアルタイム位置データを提供するための第1位置センサと、
前記可動対象物の前記第1軌道の判定を支援する以下の情報、即ち、線運動データ、角運動データ、線速度データ、角速度データ、線加速度データ、及び角加速度データ、の内の少なくとも1つを提供する第2センサと、を備えている、請求項1に記載のシステム。 - 前記第1位置センサは、全地球測位システム(GPS)受信機を含んでおり、
前記第2センサは、慣性航法システム(INS)からの少なくとも1つの構成要素を含んでいる、請求項3に記載のシステム。 - 前記測位ユニットは、前記第1リアルタイム位置データを提供するための少なくとも1つのセンサと、前記第1軌道を判定するプロセッサを含んでおり、
前記航法モジュールは、前記測位ユニットからの少なくとも1つの出力を使用し、前記記憶されている位置データをフィルタに掛けて前記第2軌道の少なくとも或る区間を前記第1軌道よりも精度よく提供するためのアルゴリズムを使って、前記第1リアルタイム位置データから前記第2軌道データを生成する、請求項1に記載のシステム。 - 前記航法モジュールは、事前に設定された標準に基づき前記区間が統計学的に信頼できるものになるまで、数式を何度も使用して前記第2軌道を反復的に較正することにより、前記第2軌道の調整可能な区間を生成する、請求項1に記載のシステム。
- 前記エラー補正計算モジュールは、前記補正後データを前記データ記憶ユニット内の前記第1位置データの幾つかと入れ替えて記憶することにより、前記第1位置データを前記補正後データで更新する、請求項1に記載のシステム。
- 前記エラー補正計算モジュールは、前記第1位置データを前記補正後データで更新して、第2位置データを提供し、前記第2位置データを前記データ記憶ユニットに記憶する、請求項1に記載のシステム。
- 前記エラー補正計算モジュールは、ユーザーインターフェースに前記補正後データを報告する、請求項1に記載のシステム。
- 前記測位ユニットは、
位置データを受信するためのセンサと、
前記センサからの前記位置データと相関付けて、前記第1位置データと前記第1リアルタイム軌道を提供するためのデジタルマップと、を備えている、請求項1に記載のシステム。 - 前記測位ユニットは、前記可動対象物内に在り、
前記航法処理モジュールと前記エラー補正計算モジュールは、前記可動対象物から離れたところに在り、前記測位ユニットに無線で繋がっている、請求項1に記載のシステム。 - 前記測位ユニットと前記航法処理モジュールは、前記可動対象物内に在り、
エラー補正計算モジュールは前記可動対象物から離れたところに在って、前記測位ユニットと前記航法処理モジュールに無線で繋がっている、請求項1に記載のシステム。 - 前記測位ユニット、前記航法処理モジュール、及び前記エラー補正計算モジュールは、前記可動対象物内に在る、請求項1に記載のシステム。
- 可動対象物の位置データを提供するための方法において、
前記可動対象物の第1位置データをリアルタイムで入手する段階と、
前記第1位置データを、少なくとも1つの時間系列で記憶する段階と、
部分的に前記第1位置データに基づいて第1軌道を求める段階と、
事後処理推定フィルタを採用することにより、前記可動対象物の前記位置データの動きを計算して、前記対象物の動きを前記第1軌道よりもより正確に描いている第2軌道を提供する段階と、
前記第1軌道を前記第2軌道と相関付けて、前記第1位置データ内の補正を要する区間を識別する段階と、
前記第1位置データ内の補正を表す補正データを生成する段階と、から成る方法。 - 在庫データを記憶し、プロセッサで可動対象物を追跡できるようにしている読み取り可能記憶媒体を有するプロセッサを備えている資材追跡在庫システムにおいて、前記記憶媒体は、
前記可動対象物の第1位置データを少なくとも1つの時間系列で記憶し、
部分的に前記第1位置データに基づいて前記可動対象物の動きを表している第1軌道を記憶し、
第2軌道が前記第1軌道よりも正確に前記対象物の動きを描くように事後処理推定アルゴリズムを含んでいるフィルタを使用して前記第1位置データから入手した、前記可動対象物の動きを表している第2軌道を記憶し、
前記第1軌道と前記第2軌道との比較に基づき、前記第1位置データに対する修正を表している修正後位置データを記憶する、システム。 - 前記記憶媒体は、データベースに前記可動対象物の事象データを更に記憶し、
前記プロセッサは、前記可動対象物の修正後位置データに基づき、前記事象順序を見直すことによって、前記事象データを更に修正する、請求項15に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US69661905P | 2005-07-05 | 2005-07-05 | |
| US11/478,991 US7848881B2 (en) | 2005-07-05 | 2006-06-29 | Automatic past error corrections for location and inventory tracking |
| PCT/US2006/025929 WO2008030213A2 (en) | 2005-07-05 | 2006-06-30 | Automatic past error corrections for location and inventory tracking |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009501344A true JP2009501344A (ja) | 2009-01-15 |
| JP2009501344A5 JP2009501344A5 (ja) | 2011-07-07 |
Family
ID=37619248
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008533334A Ceased JP2009501344A (ja) | 2005-07-05 | 2006-06-30 | 所在及び在庫追跡のための過去エラー自動補正 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7848881B2 (ja) |
| EP (1) | EP1934555A2 (ja) |
| JP (1) | JP2009501344A (ja) |
| CA (1) | CA2614977C (ja) |
| WO (1) | WO2008030213A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130137015A (ko) * | 2010-12-21 | 2013-12-13 | 로베르트 보쉬 게엠베하 | 위치 검출 방법 |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060058948A1 (en) * | 2004-07-28 | 2006-03-16 | Ms. Melanie Blass | Recordable location-based reminder system organizer |
| US8838374B2 (en) * | 2005-07-05 | 2014-09-16 | Mi-Jack Products, Inc. | Automatic correction of past position errors for location and inventory tracking |
| US7646336B2 (en) | 2006-03-24 | 2010-01-12 | Containertrac, Inc. | Automated asset positioning for location and inventory tracking using multiple positioning techniques |
| US7966126B2 (en) * | 2008-02-15 | 2011-06-21 | Ansaldo Sts Usa, Inc. | Vital system for determining location and location uncertainty of a railroad vehicle with respect to a predetermined track map using a global positioning system and other diverse sensors |
| FI20085432A0 (fi) * | 2008-05-09 | 2008-05-09 | Polar Electro Oy | Datansiirto |
| US8650098B2 (en) * | 2009-02-06 | 2014-02-11 | Calamp Corp. | Methods and systems of maintaining and monitoring vehicle tracking device inventories |
| US8296065B2 (en) * | 2009-06-08 | 2012-10-23 | Ansaldo Sts Usa, Inc. | System and method for vitally determining position and position uncertainty of a railroad vehicle employing diverse sensors including a global positioning system sensor |
| US8792903B2 (en) * | 2009-06-30 | 2014-07-29 | Qualcomm Incorporated | Trajectory-based location determination |
| JP4793479B2 (ja) * | 2009-07-09 | 2011-10-12 | カシオ計算機株式会社 | 測位装置、測位方法およびプログラム |
| US8949046B2 (en) * | 2009-07-09 | 2015-02-03 | Mi-Jack Products, Inc. | System for associating inventory with handling equipment in shipping container yard inventory transactions |
| US20110055172A1 (en) * | 2009-09-01 | 2011-03-03 | Containertrac, Inc. | Automatic error correction for inventory tracking and management systems used at a shipping container yard |
| US8630443B2 (en) * | 2009-09-01 | 2014-01-14 | Han-Shue Tan | Automatic error detection for inventory tracking and management systems used at a shipping container yard |
| JP4858608B2 (ja) * | 2009-12-15 | 2012-01-18 | カシオ計算機株式会社 | 測位装置、測位方法、プログラム及び撮像装置 |
| JP5382007B2 (ja) * | 2010-02-22 | 2014-01-08 | 株式会社デンソー | 移動軌跡表示装置 |
| US9934581B2 (en) * | 2010-07-12 | 2018-04-03 | Disney Enterprises, Inc. | System and method for dynamically tracking and indicating a path of an object |
| JP2012043081A (ja) * | 2010-08-17 | 2012-03-01 | Seiko Epson Corp | 電子機器、及び、情報管理システム |
| US9008884B2 (en) | 2010-12-15 | 2015-04-14 | Symbotic Llc | Bot position sensing |
| US8756007B2 (en) * | 2011-01-28 | 2014-06-17 | Honeywell International Inc. | Providing a location of an individual |
| JP2012185111A (ja) * | 2011-03-08 | 2012-09-27 | Seiko Epson Corp | 測位装置、測位方法 |
| TWI622540B (zh) * | 2011-09-09 | 2018-05-01 | 辛波提克有限責任公司 | 自動化儲存及取放系統 |
| JP5879883B2 (ja) * | 2011-09-30 | 2016-03-08 | カシオ計算機株式会社 | 測位装置、測位方法及びプログラム |
| US8626198B2 (en) | 2011-11-16 | 2014-01-07 | Qualcomm Incorporated | Characterizing an indoor structure based on detected movements and/or position locations of a mobile device |
| US8981905B2 (en) * | 2012-03-30 | 2015-03-17 | A2B Tracking Solutions, Inc | Secure asset tracking system |
| TW201435616A (zh) * | 2013-03-06 | 2014-09-16 | Hon Hai Prec Ind Co Ltd | 移動式資料機房控制系統 |
| US20140297485A1 (en) * | 2013-03-29 | 2014-10-02 | Lexmark International, Inc. | Initial Calibration of Asset To-Be-Tracked |
| KR101516652B1 (ko) * | 2013-06-04 | 2015-05-06 | 주식회사 동양솔루션 | 차량 입출고 관리 시스템 |
| US9916560B2 (en) | 2013-06-28 | 2018-03-13 | Wal-Mart Stores, Inc. | Inventory tracking |
| US9773223B2 (en) | 2013-06-28 | 2017-09-26 | Wal-Mart Stores, Inc. | Inventory cache |
| US9430753B2 (en) | 2013-06-28 | 2016-08-30 | Wal-Mart Stores, Inc. | Inventory tracking |
| US9942384B2 (en) | 2013-09-10 | 2018-04-10 | Google Technology Holdings LLC | Method and apparatus for device mode detection |
| US20150092048A1 (en) | 2013-09-27 | 2015-04-02 | Qualcomm Incorporated | Off-Target Tracking Using Feature Aiding in the Context of Inertial Navigation |
| US9148215B1 (en) * | 2013-12-05 | 2015-09-29 | Google Inc. | Method and device for determining communication timing |
| US9159294B2 (en) | 2014-01-31 | 2015-10-13 | Google Inc. | Buttonless display activation |
| US9037199B1 (en) | 2014-02-13 | 2015-05-19 | Google Inc. | Detecting transitions between physical activity |
| US8976063B1 (en) * | 2014-04-29 | 2015-03-10 | Google Inc. | Automated detection of vehicle parking and location |
| US9964409B1 (en) * | 2014-05-27 | 2018-05-08 | Apple Inc. | Localized map generation |
| US9886040B1 (en) * | 2014-09-24 | 2018-02-06 | Rockwell Collins, Inc. | System and method for platform alignment, navigation or targeting |
| DE102015218810A1 (de) * | 2015-09-29 | 2017-03-30 | Continental Teves Ag & Co. Ohg | Verfahren zum Auswählen von Lokalisierungsalgorithmen in einem Fahrzeug |
| US9829322B2 (en) * | 2016-03-03 | 2017-11-28 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for directing a vision-impaired user to a vehicle |
| DE102016222272B4 (de) * | 2016-11-14 | 2018-05-30 | Volkswagen Aktiengesellschaft | Schätzen einer Eigenposition |
| US10445634B2 (en) | 2016-12-14 | 2019-10-15 | Trackonomy Systems, Inc. | Fabricating multifunction adhesive product for ubiquitous realtime tracking |
| CN107367276B (zh) * | 2017-06-08 | 2022-02-18 | 北京航空航天大学 | 一种ins轨迹约束序列地形匹配算法 |
| CN107942359A (zh) * | 2017-11-14 | 2018-04-20 | 深圳市沃特沃德股份有限公司 | 车载系统行车轨迹纠错的方法及装置 |
| DE102017222290A1 (de) | 2017-12-08 | 2019-06-13 | Continental Teves Ag & Co. Ohg | Verfahren zum Bestimmen von Korrekturwerten, Verfahren zum Bestimmen einer Position eines Kraftfahrzeugs, elektronische Steuerungsvorrichtung und Speichermedium |
| WO2020078540A1 (en) | 2018-10-16 | 2020-04-23 | Huawei Technologies Co., Ltd. | Improved trajectory matching based on use of quality indicators empowered by weighted confidence values |
| NL2023068B1 (en) * | 2019-05-03 | 2020-11-30 | Prodrive Tech Bv | System and method for positioning a mobile assembly |
| CN112415554B (zh) * | 2019-08-20 | 2024-02-13 | Oppo广东移动通信有限公司 | 定位方法和装置、电子设备、计算机可读存储介质 |
| US11719541B2 (en) * | 2019-11-13 | 2023-08-08 | Aclima Inc. | Hyper-local mapping of environmental conditions |
| US11789161B2 (en) | 2020-07-14 | 2023-10-17 | Spirent Communications Plc | Accuracy of a GNSS receiver that has a non-directional antenna |
| US11287531B2 (en) | 2020-07-14 | 2022-03-29 | Spirent Communications, Plc | Architecture for providing forecasts of GNSS obscuration and multipath |
| US11536855B2 (en) * | 2020-07-14 | 2022-12-27 | Spirent Communications Plc | Path planning using forecasts of obscuration and multipath |
| CN111879338B (zh) * | 2020-07-28 | 2022-02-22 | 安徽中科美络信息技术有限公司 | 一种基于电子地图的行车轨迹规划补偿方法及装置 |
| US11819305B1 (en) | 2020-10-05 | 2023-11-21 | Trackonomy Systems, Inc. | Method for determining direction of movement through gates and system thereof |
| CN112859136B (zh) * | 2021-01-19 | 2022-03-25 | 腾讯科技(深圳)有限公司 | 一种定位方法和相关装置 |
| CN114743406B (zh) * | 2022-03-11 | 2023-04-07 | 中国电子科技集团公司第五十四研究所 | 一种船舶轨迹去纠缠方法 |
| CN117368953B (zh) * | 2023-12-08 | 2024-03-22 | 深圳咸兑科技有限公司 | 混合定位方法、装置、电子设备及计算机可读存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001116560A (ja) * | 1999-10-19 | 2001-04-27 | Fujitsu Ten Ltd | ナビゲーション装置 |
| JP2001147120A (ja) * | 1999-11-19 | 2001-05-29 | Equos Research Co Ltd | ナビゲーションシステム |
| US6408245B1 (en) * | 2000-08-03 | 2002-06-18 | American Gnc Corporation | Filtering mechanization method of integrating global positioning system receiver with inertial measurement unit |
| US20030158664A1 (en) * | 2002-02-19 | 2003-08-21 | Swope Charles B. | Method of increasing location accuracy in an inertial navigational device |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3267310B2 (ja) * | 1991-07-10 | 2002-03-18 | パイオニア株式会社 | Gpsナビゲーション装置 |
| US6266008B1 (en) | 1991-12-10 | 2001-07-24 | Charles D. Huston | System and method for determining freight container locations |
| US7075481B2 (en) | 1991-12-10 | 2006-07-11 | Charles Huston | System and method for determining freight container locations |
| JP3164659B2 (ja) * | 1992-09-16 | 2001-05-08 | 株式会社ザナヴィ・インフォマティクス | 航法装置 |
| WO1996030288A1 (fr) | 1995-03-27 | 1996-10-03 | Toyo Umpanki Co., Ltd. | Dispositif de manipulation de conteneurs et systeme de commande |
| US5739787A (en) * | 1995-04-20 | 1998-04-14 | Burke; Edmund D. | Vehicle based independent tracking system |
| US5835377A (en) * | 1997-03-24 | 1998-11-10 | International Business Machines Corporation | Method and system for optimized material movement within a computer based manufacturing system utilizing global positioning systems |
| US5906655A (en) | 1997-04-02 | 1999-05-25 | Caterpillar Inc. | Method for monitoring integrity of an integrated GPS and INU system |
| US6094607A (en) * | 1998-11-27 | 2000-07-25 | Litton Systems Inc. | 3D AIME™ aircraft navigation |
| JPH11183590A (ja) * | 1997-12-17 | 1999-07-09 | Mazda Motor Corp | 移動体用ディファレンシャルgps装置 |
| US6731237B2 (en) | 1999-11-09 | 2004-05-04 | The Charles Stark Draper Laboratory, Inc. | Deeply-integrated adaptive GPS-based navigator with extended-range code tracking |
| US6611755B1 (en) | 1999-12-19 | 2003-08-26 | Trimble Navigation Ltd. | Vehicle tracking, communication and fleet management system |
| US6853687B2 (en) | 2000-01-12 | 2005-02-08 | Wherenet Corp | Proximity-based magnetic field generator for controlling operation of RF burst-transmitting tags of geolocation system |
| US6317688B1 (en) | 2000-01-31 | 2001-11-13 | Rockwell Collins | Method and apparatus for achieving sole means navigation from global navigation satelite systems |
| DE10021373A1 (de) | 2000-05-02 | 2001-11-08 | Siemens Ag | Verfahren zur Positionsbestimmung und Navigationsgerät |
| AU2001271393A1 (en) | 2000-06-23 | 2002-01-08 | Sportvision, Inc. | Track model constraint for gps position |
| US6401036B1 (en) * | 2000-10-03 | 2002-06-04 | Motorola, Inc. | Heading and position error-correction method and apparatus for vehicle navigation systems |
| US6502033B1 (en) | 2000-10-05 | 2002-12-31 | Navigation Technologies Corp. | Turn detection algorithm for vehicle positioning |
| US6577921B1 (en) | 2000-11-27 | 2003-06-10 | Robert M. Carson | Container tracking system |
| US6581005B2 (en) * | 2000-11-30 | 2003-06-17 | Nissan Motor Co., Ltd. | Vehicle position calculation apparatus and method |
| US6427122B1 (en) | 2000-12-23 | 2002-07-30 | American Gnc Corporation | Positioning and data integrating method and system thereof |
| US6876326B2 (en) | 2001-04-23 | 2005-04-05 | Itt Manufacturing Enterprises, Inc. | Method and apparatus for high-accuracy position location using search mode ranging techniques |
| US6657586B2 (en) | 2001-05-03 | 2003-12-02 | Wherenet Corp | System and method for locating an object using global positioning system receiver |
| US6622091B2 (en) * | 2001-05-11 | 2003-09-16 | Fibersense Technology Corporation | Method and system for calibrating an IG/GP navigational system |
| US6615135B2 (en) | 2001-05-24 | 2003-09-02 | Prc Inc. | Satellite based on-board vehicle navigation system including predictive filtering and map-matching to reduce errors in a vehicular position |
| US6697736B2 (en) | 2002-02-06 | 2004-02-24 | American Gnc Corporation | Positioning and navigation method and system thereof |
| US6801159B2 (en) | 2002-03-19 | 2004-10-05 | Motorola, Inc. | Device for use with a portable inertial navigation system (“PINS”) and method for transitioning between location technologies |
| US6826478B2 (en) | 2002-04-12 | 2004-11-30 | Ensco, Inc. | Inertial navigation system for mobile objects with constraints |
| US6810324B1 (en) | 2002-06-06 | 2004-10-26 | Trimble Navigation, Ltd. | Substitution of high quality position measurements with upgraded low quality position measurements |
| US6804621B1 (en) | 2003-04-10 | 2004-10-12 | Tata Consultancy Services (Division Of Tata Sons, Ltd) | Methods for aligning measured data taken from specific rail track sections of a railroad with the correct geographic location of the sections |
| US6694260B1 (en) | 2003-05-09 | 2004-02-17 | Deere & Company | Inertial augmentation for GPS navigation on ground vehicles |
-
2006
- 2006-06-29 US US11/478,991 patent/US7848881B2/en active Active
- 2006-06-30 JP JP2008533334A patent/JP2009501344A/ja not_active Ceased
- 2006-06-30 CA CA2614977A patent/CA2614977C/en not_active Expired - Fee Related
- 2006-06-30 WO PCT/US2006/025929 patent/WO2008030213A2/en active Application Filing
- 2006-06-30 EP EP06851611A patent/EP1934555A2/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001116560A (ja) * | 1999-10-19 | 2001-04-27 | Fujitsu Ten Ltd | ナビゲーション装置 |
| JP2001147120A (ja) * | 1999-11-19 | 2001-05-29 | Equos Research Co Ltd | ナビゲーションシステム |
| US6408245B1 (en) * | 2000-08-03 | 2002-06-18 | American Gnc Corporation | Filtering mechanization method of integrating global positioning system receiver with inertial measurement unit |
| US20030158664A1 (en) * | 2002-02-19 | 2003-08-21 | Swope Charles B. | Method of increasing location accuracy in an inertial navigational device |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130137015A (ko) * | 2010-12-21 | 2013-12-13 | 로베르트 보쉬 게엠베하 | 위치 검출 방법 |
| JP2014505241A (ja) * | 2010-12-21 | 2014-02-27 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 位置決定方法 |
| US9285408B2 (en) | 2010-12-21 | 2016-03-15 | Robert Bosch Gmbh | Determination of positions |
| KR101902030B1 (ko) | 2010-12-21 | 2018-09-27 | 로베르트 보쉬 게엠베하 | 위치 검출 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2008030213A2 (en) | 2008-03-13 |
| CA2614977C (en) | 2014-08-12 |
| CA2614977A1 (en) | 2007-01-05 |
| US20070010940A1 (en) | 2007-01-11 |
| WO2008030213A3 (en) | 2008-07-03 |
| EP1934555A2 (en) | 2008-06-25 |
| US7848881B2 (en) | 2010-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009501344A (ja) | 所在及び在庫追跡のための過去エラー自動補正 | |
| US8838374B2 (en) | Automatic correction of past position errors for location and inventory tracking | |
| JP6855580B2 (ja) | Gnss受信機保護レベル | |
| AU2010304861B2 (en) | Improvements in or relating to radio navigation | |
| US8170796B2 (en) | Ins based GPS carrier phase cycle slip detection and repairing | |
| US20150153178A1 (en) | Car navigation system and method in which global navigation satellite system (gnss) and dead reckoning (dr) are merged | |
| US8912953B2 (en) | GPS receiver and calculation method of navigation solution thereof | |
| EP2215495B1 (en) | Location determination system for vehicles | |
| US20050010364A1 (en) | Method for improving GPS integrity and detecting multipath interference using inertial navigation sensors and a network of mobile receivers | |
| US20100191461A1 (en) | System and method of lane path estimation using sensor fusion | |
| US11550067B2 (en) | System and method for fusing dead reckoning and GNSS data streams | |
| KR102205329B1 (ko) | 위성 지오로케이션 측정들에서 에러의 레벨을 추정하고 상기 추정들의 신뢰성을 모니터링하는 방법 및 관련 디바이스 | |
| CN112923919A (zh) | 基于图优化的行人定位方法及系统 | |
| KR20130036145A (ko) | 이동 정보 결정 장치, 수신기 및 그에 의한 방법 | |
| Boucher et al. | A hybrid particle approach for GNSS applications with partial GPS outages | |
| US20230384097A1 (en) | Calibrating A Pressure Sensor | |
| US20230341563A1 (en) | System and method for computing positioning protection levels | |
| MX2008000385A (en) | Automatic past error corrections for location and inventory tracking | |
| JP2011107108A (ja) | 移動体用測位装置 | |
| EP4102184A1 (en) | Techniques for environmental parameter mapping | |
| US20230138050A1 (en) | Identifying problematic 2d positions from mobile devices | |
| Munson | High-precision GPS for continuous monitoring of rail | |
| Ahmad et al. | Reliability of GNSS Measurements via Pseudorange Prediction Using an Odometer for Robust Land-Vehicle Navigation | |
| KR20130135634A (ko) | 글로벌 위성 항법 시스템을 이용한 위치정보 측정 시스템, 측정방법 및 그 기록매체 | |
| JPWO2020253922A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090630 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110530 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110830 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111130 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120913 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20121009 |
|
| RD13 | Notification of appointment of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7433 Effective date: 20121031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20121031 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130205 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130214 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130305 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130507 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130625 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20131029 |