JP2009295709A - Mark recognition system, mark recognition method, and surface mount machine - Google Patents
Mark recognition system, mark recognition method, and surface mount machine Download PDFInfo
- Publication number
- JP2009295709A JP2009295709A JP2008146509A JP2008146509A JP2009295709A JP 2009295709 A JP2009295709 A JP 2009295709A JP 2008146509 A JP2008146509 A JP 2008146509A JP 2008146509 A JP2008146509 A JP 2008146509A JP 2009295709 A JP2009295709 A JP 2009295709A
- Authority
- JP
- Japan
- Prior art keywords
- mark
- camera
- substrate
- base
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 10
- 230000007246 mechanism Effects 0.000 claims abstract description 51
- 239000000758 substrate Substances 0.000 claims description 87
- 239000013598 vector Substances 0.000 description 6
- 239000011159 matrix material Substances 0.000 description 5
- 230000009466 transformation Effects 0.000 description 5
- 230000007723 transport mechanism Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000002950 deficient Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
Images






Landscapes
- Supply And Installment Of Electrical Components (AREA)
Abstract
Description
この発明は、カメラを用いてマーク認識を行なうマーク認識システム、マーク認識方法、および当該マーク認識システムを備えた表面実装機に関するものである。 The present invention relates to a mark recognition system that performs mark recognition using a camera, a mark recognition method, and a surface mounter including the mark recognition system.
従来より、フィデューシャルマーク等の基板に付されたマーク(基板上マーク)を基板認識カメラにより認識して、当該認識結果に基づいて基板に対する部品実装を行なう表面実装機が知られている。具体的に言うと、カメラは基板上のフィデューシャルマークの上方に移動して、フィデューシャルマークの位置を認識する。こうしてカメラにより認識されたマーク位置に基づいて以後の部品実装動作が制御されることで、基板上の適切な位置に部品が実装される。また、フィデューシャルマークの上方にカメラを移動させるために、例えば、特許文献1記載の表面実装機では、次のような構成が採用されている。つまり、同文献の表面実装機では、ヘッドユニットに基板認識カメラが取り付けられており、ヘッドユニットの移動に伴って基板認識カメラが基板上マークの上方に移動してマーク認識を行なう。つまり、ヘッドユニットは駆動機構(特許文献1中のX−Yロボット)により駆動可能に構成されており、駆動機構はヘッドユニットを駆動することで、ヘッドユニットに取り付けられたカメラを移動させることができる。 2. Description of the Related Art Conventionally, a surface mounter that recognizes a mark (a mark on a board) such as a fiducial mark by a board recognition camera and mounts components on the board based on the recognition result is known. More specifically, the camera moves above the fiducial mark on the substrate and recognizes the position of the fiducial mark. Thus, the subsequent component mounting operation is controlled based on the mark position recognized by the camera, so that the component is mounted at an appropriate position on the board. Further, in order to move the camera above the fiducial mark, for example, the following configuration is employed in the surface mounter described in Patent Document 1. That is, in the surface mounter of the same document, a board recognition camera is attached to the head unit, and the board recognition camera moves above the mark on the board as the head unit moves to perform mark recognition. In other words, the head unit is configured to be drivable by a drive mechanism (XY robot in Patent Document 1), and the drive mechanism can move the camera attached to the head unit by driving the head unit. it can.
ところで、駆動機構は、駆動動作の連続実行等の原因によって発熱してしまい、熱変形を引き起こすことがある。そして、駆動機構にこのような熱変形が発生してしまうと、この駆動機構による駆動を受けて移動するカメラの移動位置が変動してしまう場合があった。その結果、フィデューシャルマーク認識の際における、カメラとフィデューシャルマークの位置関係にずれが発生してしまい、カメラがフィデューシャルマークの位置を誤って認識(マーク位置誤認識)してしまう場合があった。 By the way, the drive mechanism generates heat due to causes such as continuous execution of drive operation, and may cause thermal deformation. When such a thermal deformation occurs in the drive mechanism, the movement position of the camera that moves upon receiving the drive by the drive mechanism may change. As a result, the positional relationship between the camera and the fiducial mark is deviated during fiducial mark recognition, and the camera erroneously recognizes the fiducial mark position (mark position misrecognition). There was a case.
そこで、特許文献1記載の表面実装機では、較正用マーク(同文献における「基準マーク」)が設けられている。この較正用マークは基台に対して固定的に設けられており、適当なタイミングで基板認識カメラが較正用マークを認識することで、駆動機構の熱変形に関する情報が得られる。そして、かかる情報に基づいて基板認識カメラの駆動を制御することで、熱変形に依らず当該カメラを基板上マークの上方に適切に位置させて、上述のようなカメラによるマーク位置誤認識の発生を抑制している。 Therefore, the surface mounting machine described in Patent Document 1 is provided with a calibration mark (“reference mark” in the same document). The calibration mark is fixedly provided on the base, and the substrate recognition camera recognizes the calibration mark at an appropriate timing, so that information relating to thermal deformation of the drive mechanism can be obtained. Then, by controlling the driving of the board recognition camera based on such information, the camera is appropriately positioned above the mark on the board regardless of thermal deformation, and the above-described erroneous mark position recognition by the camera occurs. Is suppressed.
また、後に詳述するように、熱変形に関する情報(熱変形情報)をより高精度に求めるために、複数の較正用マークを設けることができる。この場合、基板認識カメラが、複数の較正用マークを順次認識する。そして、各較正用マークの認識結果から熱変形情報を求めることで、熱変形情報を高精度に求めることができる。さらに、基板上マーク認識の際には、こうして求められた熱変形情報に基づいて、基板認識カメラの駆動を制御することで、基板認識カメラを基板上マークの上方に適切に位置させることができる。 Further, as will be described in detail later, a plurality of calibration marks can be provided in order to obtain information on thermal deformation (thermal deformation information) with higher accuracy. In this case, the substrate recognition camera sequentially recognizes a plurality of calibration marks. Then, by obtaining the thermal deformation information from the recognition result of each calibration mark, the thermal deformation information can be obtained with high accuracy. Furthermore, when recognizing the mark on the substrate, the substrate recognition camera can be appropriately positioned above the mark on the substrate by controlling the drive of the substrate recognition camera based on the thermal deformation information thus obtained. .
ところで、基板上マーク認識動作を効率的に行うこと等を目的として、複数の基板認識カメラがヘッドユニットに設けられる場合がある(特許文献2)。しかしながら、この場合、較正用マークの認識結果に基づいて基板認識カメラの駆動制御を実行しようとすると、次のような問題が発生することがあった。つまり、基板認識カメラのそれぞれが較正用マーク認識動作を実行することで、熱変形情報を求めるためにかかる時間が増大してしまう場合があった。特に、上述のように較正用マークを複数設けた場合には、基板認識カメラのそれぞれが複数の較正用マークを順次認識することとなるため、このような時間の増大はより顕著となる場合があった。したがって、かかる問題の発生を抑制するためには、較正用マーク認識動作を効率的に行なうことが望まれる。 Incidentally, there are cases where a plurality of substrate recognition cameras are provided in the head unit for the purpose of efficiently performing the on-substrate mark recognition operation (Patent Document 2). However, in this case, the following problem may occur when drive control of the board recognition camera is executed based on the recognition result of the calibration mark. In other words, the time required for obtaining the thermal deformation information may increase due to each of the board recognition cameras performing the calibration mark recognition operation. In particular, when a plurality of calibration marks are provided as described above, since each of the board recognition cameras sequentially recognizes a plurality of calibration marks, such an increase in time may be more noticeable. there were. Therefore, in order to suppress the occurrence of such a problem, it is desired to efficiently perform the calibration mark recognition operation.
この発明は上記課題に鑑みなされたものであり、複数設けられた較正用マークの認識動作を効率的に実行しつつ、複数のカメラそれぞれが基板上マークの位置を適切に認識することを可能とするマーク認識システム、マーク認識方法および表面実装機を提供することを目的とする。 The present invention has been made in view of the above problems, and enables a plurality of cameras to appropriately recognize the positions of marks on a substrate while efficiently performing a recognition operation of a plurality of calibration marks provided. An object of the present invention is to provide a mark recognition system, a mark recognition method, and a surface mounter.
この発明にかかるマーク認識システムは、上記目的を達成するために、複数の較正用マークを有する基台と、基台の鉛直方向上側で複数のカメラを保持するユニットと、鉛直方向に直交する方向にユニットを駆動する駆動機構と、駆動機構によるユニットの駆動を制御して複数のカメラの相対位置関係を保持したままカメラを移動させる制御手段と、複数のカメラの相対位置関係に関する相対位置情報を記憶する記憶手段とを備え、制御手段は、複数のカメラのうちの一のカメラを各較正用マークの認識可能位置に移動させることで得られる複数の較正用マークの認識結果を用いて駆動機構の熱変形に関する熱変形情報を求め、熱変形情報に基づきユニットの駆動を較正することによって基台上の基板に付された基板上マークを認識可能な位置に一のカメラを移動させて基板上マークを認識し、相対位置情報と熱変形情報とに基づきユニットの駆動を較正することによって基板上マークを認識可能な位置に一のカメラ以外のカメラを移動させて基板上マークを認識することを特徴としている。 In order to achieve the above object, a mark recognition system according to the present invention includes a base having a plurality of calibration marks, a unit that holds a plurality of cameras above the base in the vertical direction, and a direction orthogonal to the vertical direction. A drive mechanism for driving the unit, control means for controlling the drive of the unit by the drive mechanism to move the camera while maintaining the relative positional relationship of the plurality of cameras, and relative position information regarding the relative positional relationship of the plurality of cameras. Storage means for storing, and the control means uses a recognition result of the plurality of calibration marks obtained by moving one of the plurality of cameras to a recognizable position of each calibration mark. It is possible to recognize the mark on the board attached to the board on the base by calibrating the drive of the unit based on the thermal deformation information by obtaining the thermal deformation information on the thermal deformation of The camera is moved to a position where the mark on the board is recognized, and the unit drive is calibrated based on the relative position information and the thermal deformation information to move the camera other than the one camera to a position where the mark on the board can be recognized. And recognizing the mark on the substrate.
また、この発明にかかるマーク認識方法は、基台の鉛直方向上側で複数のカメラを保持するユニットを駆動機構により鉛直方向に直交する方向に駆動することで、基板に付された基板上マークを認識可能な位置に複数のカメラの相対位置関係を保持したままカメラを移動させて、基板上マークをカメラにより認識するマーク認識方法であって、上記目的を達成するために、複数のカメラのうちの一のカメラを、基台に設けられた複数の較正用マークそれぞれの認識可能位置に移動させることで得られる複数の較正用マークの認識結果を用いて駆動機構の熱変形に関する熱変形情報を求め、熱変形情報に基づきユニットの駆動を較正することによって基台上の基板に付された基板上マークを認識可能な位置に一のカメラを移動させて基板上マークを認識し、複数のカメラの相対位置関係に関する相対位置情報と熱変形情報とに基づきユニットの駆動を較正することによって基板上マークを認識可能な位置に一のカメラ以外のカメラを移動させて基板上マークを認識することを特徴としている。 In the mark recognition method according to the present invention, a unit holding a plurality of cameras on the upper side in the vertical direction of the base is driven in a direction perpendicular to the vertical direction by a drive mechanism, so that the on-board mark attached to the substrate is displayed. A mark recognition method for recognizing a mark on a board by a camera by moving the camera while maintaining the relative positional relationship of the plurality of cameras to a recognizable position. The thermal deformation information on the thermal deformation of the drive mechanism is obtained using the recognition result of the plurality of calibration marks obtained by moving the one camera to the recognizable position of each of the plurality of calibration marks provided on the base. The camera is moved to a position where the mark on the board on the base plate can be recognized by calibrating the drive of the unit based on the thermal deformation information, and the mark on the board is moved. And calibrate the drive of the unit based on the relative position information on the relative positional relationship of the plurality of cameras and the thermal deformation information, and move the camera other than one camera to a position where the mark on the board can be recognized. It is characterized by recognizing the upper mark.
このように構成された発明(マーク認識システム、マーク認識方法)では、複数のカメラのうち一のカメラが各較正用マークを認識し、このマーク認識結果から駆動機構の熱変形に関する熱変形情報が求められる。したがって、一のカメラにより基板上マーク認識を行う場合は、この熱変形情報に基づいて一のカメラの駆動を較正することで、駆動機構の熱変形に依らず当該一のカメラを基板上マークの認識可能位置に適切に移動させることができる。こうして、熱変形に依らず、一のカメラにより基板上マークの位置を適切に認識することができる。 In the invention thus configured (mark recognition system, mark recognition method), one of the plurality of cameras recognizes each calibration mark, and thermal deformation information relating to thermal deformation of the drive mechanism is obtained from the mark recognition result. Desired. Therefore, when the on-board mark recognition is performed by one camera, the driving of the one camera is calibrated based on the thermal deformation information, so that the one camera can be placed on the board mark regardless of the thermal deformation of the driving mechanism. It can be appropriately moved to a recognizable position. Thus, the position of the mark on the substrate can be properly recognized by one camera regardless of thermal deformation.
一方、一のカメラ以外のカメラで基板上マーク認識を行う場合は、先ほどの熱変形情報と、複数のカメラの相対位置関係に関する相対位置情報とに基づいて、一のカメラ以外のカメラの駆動を較正する。このように熱変形情報と相対位置情報とに基づいてカメラの駆動を較正することで、駆動機構の熱変形に依らず一のカメラ以外のカメラを基板上マークの認識可能位置に適切に移動させることができる。その結果、一のカメラ以外のカメラによっても、熱変形に依らず基板上マークの位置を適切に認識することができる。つまり、この発明では、複数のカメラの相対位置関係に関する相対位置情報が活用されることで、一のカメラ以外のカメラについては較正用マークの認識動作を行なわずとも、基板上マークの位置を適切に認識することができる。こうして較正用マーク認識動作を効率的に実行しつつ、全てのカメラについて基板上マークの位置を適切に認識することが可能となっている。 On the other hand, when the on-board mark recognition is performed by a camera other than the one camera, the cameras other than the one camera are driven based on the thermal deformation information and the relative position information on the relative positional relationship of the plurality of cameras. Calibrate. Thus, by calibrating the driving of the camera based on the thermal deformation information and the relative position information, the camera other than the one camera is appropriately moved to the recognizable position on the board regardless of the thermal deformation of the driving mechanism. be able to. As a result, the position of the mark on the substrate can be properly recognized by a camera other than one camera, regardless of thermal deformation. In other words, in the present invention, the relative position information on the relative positional relationship of a plurality of cameras is utilized, so that the position of the mark on the substrate can be appropriately determined without performing the calibration mark recognition operation for cameras other than one camera. Can be recognized. In this way, it is possible to appropriately recognize the position of the mark on the substrate for all cameras while efficiently executing the calibration mark recognition operation.
また、駆動機構は、鉛直方向に直交する第1軸方向にユニットを駆動する第1軸駆動部と、鉛直方向および第1軸方向に直交する第2軸方向に第1軸駆動部を駆動する第2軸駆動部とで構成することができるが、このような駆動機構は第1軸方向あるいは第2軸方向に熱膨張する場合がある。 The drive mechanism drives the first axis drive unit that drives the unit in a first axis direction orthogonal to the vertical direction, and the first axis drive unit in a second axis direction orthogonal to the vertical direction and the first axis direction. Although it can be configured with a second axis drive unit, such a drive mechanism may thermally expand in the first axis direction or the second axis direction.
特に、第1軸駆動部は、第1軸方向に延びる第1ねじ軸と、第1ねじ軸に螺合するとともにユニットに取り付けられたナットとを有し、第2軸駆動部は、第2軸方向に伸びる第2ねじ軸と、第2ねじ軸に螺合するとともに第1軸ガイドに取り付けられたナットとを有する構成においては、熱変形によりねじピッチが変化する場合がある。 In particular, the first shaft driving unit includes a first screw shaft extending in the first axial direction, a nut screwed to the first screw shaft and attached to the unit, and the second shaft driving unit includes a second screw shaft. In a configuration having a second screw shaft extending in the axial direction and a nut screwed to the second screw shaft and attached to the first shaft guide, the screw pitch may change due to thermal deformation.
したがって、駆動機構の熱変形による影響を抑制するためには、較正用マークを認識して熱変形情報を求めた上で、当該熱変形情報に基づいて基板上マーク認識を実行することが望ましい。そこで、これらの駆動機構を備えた構成に対しては本発明を適用して、較正用マーク認識動作を効率的に実行しつつ、全てのカメラについて基板上マークの位置を適切に認識することを可能とすることが好適である。 Therefore, in order to suppress the influence of the thermal deformation of the drive mechanism, it is desirable to recognize the calibration mark and obtain the thermal deformation information, and then execute the on-board mark recognition based on the thermal deformation information. Therefore, the present invention is applied to the configuration provided with these drive mechanisms to appropriately recognize the position of the mark on the substrate for all cameras while efficiently performing the calibration mark recognition operation. It is preferable to make it possible.
また、複数の較正用マークのうち少なくとも2つの較正用マークそれぞれの位置は、第1軸方向と第2軸方向のいずれにおいても互いに異なるように構成しても良い。このように構成することで、熱変形情報を高精度に求めることができ、基板上マークの位置をより適切に認識することが可能となる。 The positions of at least two calibration marks among the plurality of calibration marks may be different from each other in both the first axis direction and the second axis direction. With this configuration, the thermal deformation information can be obtained with high accuracy, and the position of the mark on the substrate can be recognized more appropriately.
また、3個以上の較正用マークが設けられているように構成しても良い。このように構成した場合、後述するように、第1軸方向または第2軸方向に対してリニアな熱変形成分のみならず、回転方向の熱変形成分についても求めることができる。したがって、駆動機構の熱変形に関する熱変形情報を高精度に求めることができ、基板上マークの位置をより適切に認識することが可能となる。 Further, three or more calibration marks may be provided. When configured in this way, as will be described later, it is possible to obtain not only the linear thermal deformation component in the first axial direction or the second axial direction but also the thermal deformation component in the rotational direction. Therefore, it is possible to obtain the heat deformation information related to the heat deformation of the drive mechanism with high accuracy, and to recognize the position of the mark on the substrate more appropriately.
また、基板上マークはフィデューシャルマークであっても良い。フィデューシャルマークは基板の位置決めに用いられるため、カメラによる認識動作を高精度に行なうことが重要である。そこで、かかる構成に対しては、本発明を適用して、較正用マーク認識動作を効率的に実行しつつ、フィデューシャルマークの位置を適切に認識することを可能とすることが好適である。 Further, the mark on the substrate may be a fiducial mark. Since fiducial marks are used for positioning a substrate, it is important to perform a recognition operation with a camera with high accuracy. In view of this, it is preferable to apply the present invention to such a configuration so that the position of the fiducial mark can be appropriately recognized while efficiently performing the calibration mark recognition operation. .
また、本発明にかかる表面実装機は、上述の本発明にかかるマーク認識システムを備えた表面実装機であって、基台上に搬送された基板に対して部品を実装することを特徴とする。したがって、較正用マーク認識動作を効率的に実行して生産効率を高めつつ、全てのカメラについて基板上マークの位置を適切に認識することでき、高い位置精度でもって基板上に部品を実装することが可能となっている。 A surface mounter according to the present invention is a surface mounter including the above-described mark recognition system according to the present invention, and is characterized in that a component is mounted on a board conveyed on a base. . Therefore, it is possible to appropriately recognize the position of the mark on the board for all cameras while efficiently executing the calibration mark recognition operation to increase production efficiency, and to mount components on the board with high positional accuracy. Is possible.
以上のように、本発明によれば、複数のカメラの相対位置関係に関する相対位置情報が活用されることで、一のカメラ以外のカメラについては較正用マークの認識動作を行なわずとも、基板上マークの位置を適切に認識することができる。こうして較正用マーク認識動作を効率的に実行しつつ、全てのカメラについて基板上マークの位置を適切に認識することが可能となっている。 As described above, according to the present invention, the relative position information related to the relative positional relationship of a plurality of cameras is utilized, so that the camera other than the one camera does not perform the calibration mark recognition operation. The position of the mark can be properly recognized. In this way, it is possible to appropriately recognize the position of the mark on the substrate for all cameras while efficiently executing the calibration mark recognition operation.
図1は表面実装機の概略構成を示す平面図である。また、図2は図1に示す表面実装機の電気的構成を示すブロック図である。この表面実装機1の実装制御ユニット4には、主制御部41が設けられており、この主制御部41が表面実装機1全体の動作を統括的にコントロールする。
FIG. 1 is a plan view showing a schematic configuration of the surface mounter. FIG. 2 is a block diagram showing an electrical configuration of the surface mounter shown in FIG. The mounting
この表面実装機1では、基台11の上に基板搬送機構2が配置されており、基板3を基板搬送方向Xに搬送可能となっている。より詳しくは、基板搬送機構2は、基台11上において基板3を図1の右側から左側へ搬送する一対のコンベア21,21を有している。これらのコンベア21,21は表面実装機全体を制御する実装制御ユニット4の駆動制御部43により制御される。すなわち、コンベア21,21は駆動制御部43からの駆動指令に応じて作動し、搬入されてきた基板3を所定の実装作業位置(同図に示す基板3の位置)で停止させる。そして、このように搬送されてきた基板3は図略の保持装置により固定保持される。この基板3に対して部品収容部5から供給される電子部品(図示省略)がヘッドユニット6に搭載された吸着ノズル(図示省略)により移載される。また、基板3に実装すべき部品の全部について実装処理が完了すると、基板搬送機構2は駆動制御部43からの駆動指令に応じて基板3を搬出する。
In the surface mounter 1, the
また、基台11には、3つのベースマークBM1、BM2、BM3(較正用マーク)が該基台11に対して固定的に設けられている。これらのベースマークBM1、BM2、BM3は、Z軸方向上側から見て、基板3が搬送されてくる基板搬送経路31の外側に配置されている。各ベースマークの位置関係は次の通りである。つまり、X軸方向において、各ベースマークBM1〜BM3の位置は互いに異なっている。また、Y軸方向においては、ベースマークBM1、BM2の位置は略等しい一方、ベースマークBM1(BM2)とベースマークBM3との位置は互いに異なっている。これらのベースマークBM1〜BM3は、後述する熱変形情報取得動作の際に用いられるものであるが、詳細は熱変形情報取得動作の説明の際に述べる。
The
基板搬送機構2の両側には、上記した部品収容部5が配置されている。これらの部品収容部5は多数のテープフィーダ51を備えている。また、各テープフィーダ51には、電子部品を収納・保持したテープを巻回したリール(図示省略)が配置されており、電子部品を供給可能となっている。すなわち、各テープには、集積回路(IC)、トランジスタ、コンデンサ等の小片状のチップ電子部品が所定間隔おきに収納、保持されている。そして、テープフィーダ51がリールからテープをヘッドユニット6側に送り出すことによって該テープ内の電子部品が間欠的に繰り出され、その結果、ヘッドユニット6の吸着ノズルによる電子部品のピックアップが可能となる。
On both sides of the
また、この基板搬送機構2の他に、ヘッド駆動機構7が設けられている。このヘッド駆動機構7はヘッドユニット6を基台11の所定範囲にわたりX軸方向およびY軸方向(X軸およびZ軸に直交する方向)に移動するための機構である。そして、ヘッドユニット6の移動により吸着ノズルで吸着された電子部品が部品収容部5の上方位置から基板3の上方位置に搬送される。すなわち、ヘッド駆動機構7は、X軸方向に伸びる実装用ヘッド支持部材71を有しており、この実装用ヘッド支持部材71はヘッドユニット6をX軸に沿って移動可能に支持している。また、実装用ヘッド支持部材71は、両端部がY軸方向の固定レール72に支持され、この固定レール72に沿ってY軸方向に移動可能になっている。さらに、ヘッド駆動機構7は、ヘッドユニット6をX軸方向に駆動する駆動源たるX軸サーボモータ73と、ヘッドユニット6をY軸方向に駆動する駆動源たるY軸サーボモータ74とを有している。モータ73は、X軸方向に延びるボールねじ軸751に連結されており、このボールねじ軸751に螺合するボールナット(図示省略)はヘッドユニット6に取り付けられている。したがって、駆動制御部43からの動作指令に応じてモータ73が作動することでヘッドユニット6がX軸方向に駆動される。一方、モータ74はY軸方向に延びるボールねじ軸761に連結されており、このボールねじ軸761に螺合するボールナット762は実装用ヘッド支持部材71に取り付けられている。したがって、駆動制御部43からの動作指令に応じてモータ74が作動することで実装用ヘッド支持部材71がY軸方向へ駆動される。
In addition to the
このように本実施形態では、X軸方向が本発明の「第1軸方向」に相当し、Y軸方向が本発明の「第2軸方向」に相当している。また、モータ73と、モータ73に連結されたボールねじ軸751(第1ねじ軸)と、ボールねじ軸751に螺合するボールナットとが、本発明の第1軸駆動部として機能している。さらに、モータ74と、モータ74に連結されたボールねじ軸761(第2ねじ軸)と、ボールねじ軸761に螺合するボールナット762とが、本発明の第2軸駆動部として機能している。
Thus, in the present embodiment, the X-axis direction corresponds to the “first axis direction” of the present invention, and the Y-axis direction corresponds to the “second axis direction” of the present invention. The
ヘッド駆動機構7によりヘッドユニット6は電子部品を吸着ノズルにより吸着保持したまま基板3に搬送するとともに、所定位置に移載する。より詳しく説明すると、ヘッドユニット6は次のように構成されている。このヘッドユニット6では、鉛直方向Zに延設された実装用ヘッド62が8本、X軸方向に等間隔で列状配置されている。実装用ヘッド62のそれぞれの先端部には吸着ノズルが装着されている。
The
また、ヘッドユニット6では、吸着ノズルを上下方向Zに昇降させるZ軸サーボモータ64が設けられており、実装制御ユニット4の駆動制御部43からの動作指令に基づきZ軸サーボモータ64が作動して吸着ノズルを上下方向Zに移動させる。また、吸着ノズルをR方向に回転させるR軸サーボモータ65が設けられており、実装制御ユニット4の駆動制御部43からの動作指令に基づきR軸サーボモータ65が作動して吸着ノズルをR方向に回転させる。したがって、上記のようにヘッド駆動機構7によってヘッドユニット6が部品収容部5に移動されるとともに、Z軸サーボモータ64およびR軸サーボモータ65を駆動することによって、部品収容部5から供給される電子部品に対して吸着ノズルの先端部が適正な姿勢で当接する。
The
また、ヘッドユニット6には2台の基板認識カメラ91、92が取り付けられている。したがって、ヘッド駆動機構7によりヘッドユニット6が駆動されると、このヘッドユニット6の移動に伴って、これらの基板認識カメラ91、92はX−Y面内を移動することができる。基板認識カメラ91、92は、鉛直方向下側を向いて取り付けられており、基板3に付されたフィデューシャルマークの映像を取得してフィデューシャルマークの位置を認識可能である。つまり、基板認識カメラ91、92により認識されたフィデューシャルマークの位置に関するマーク位置情報が画像処理部44に送られる。続いて、画像処理部44ではフィデューシャルマークの位置から基板3の位置に関する基板位置情報が求められる。そして、主制御部41が、かかる基板位置情報を参照しつつ表面実装機1の各部を制御することで、適切な位置に電子部品を実装することができる。
In addition, two
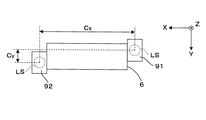
図3は、2台の基板認識カメラの関係を示す平面図である。同図が示すように、基板認識カメラ91、92は、X軸方向およびY軸方向において互いに異なる位置に取り付けられている。つまり、基板認識カメラ91、92は、ヘッドユニット6のX軸方向の両端部に取り付けられており、X軸方向における基板認識カメラ91、92それぞれの中心の間は、X軸方向カメラ間距離Cxだけ離れている。一方、Y軸方向においても、基板認識カメラ91、92は相互にずらして取り付けられており、Y軸方向における基板認識カメラ91、92それぞれの中心の間は、Y軸方向カメラ間距離Cyだけ離れている。なお、基板認識カメラ91、92の中心は、例えば、各カメラが備えるレンズLSの中心として求めることができる。そして、距離Cx、Cyで与えられる基板認識カメラ91、92の相対位置情報は、メモリ42(図2)に記憶されている。
FIG. 3 is a plan view showing the relationship between two substrate recognition cameras. As shown in the figure, the
これらの基板認識カメラ91、92は基板3に付されたフィデューシャルマークを認識するために用いられるが、本実施形態では、フィデューシャルマーク認識動作に先立って、先述のヘッド駆動機構7の熱変形に関する熱変形情報が求められる。つまり、ヘッド駆動機構7は連続駆動等の原因により発熱する場合があり、その結果、ボールねじ軸751、761等の熱膨張、湾曲、あるいはねじピッチの変動等、様々な熱変形が引き起こされるおそれがある。そこで、本実施形態では、ヘッド駆動機構7の熱変形に関する熱変形情報が予め求められて、この熱変形情報に基づいてフィデューシャルマーク認識が実行される。
These
図4は、熱変形情報取得動作を示すフローチャートである。また、図5は、熱変形情報取得動作における基板認識カメラの動作を示す平面図である。これから説明するとおり、熱変形情報取得動作は、ベースマークBM1〜BM3が基板認識カメラにより認識されることで実行されるが、かかるベースマーク認識は基板認識カメラ91のみにより実行される。そこで、基板認識カメラ91、92の役割の違いを判りやすくするために、以後の説明では必要に応じて、ベースマーク認識を行なう基板認識カメラ91をメインカメラ91と称する一方、ベースマーク認識を行なわない基板認識カメラ92をサブカメラ92と称することとする。
FIG. 4 is a flowchart showing the heat deformation information acquisition operation. FIG. 5 is a plan view showing the operation of the board recognition camera in the thermal deformation information acquisition operation. As will be described below, the thermal deformation information acquisition operation is executed when the base marks BM1 to BM3 are recognized by the board recognition camera, but such base mark recognition is executed only by the
本実施形態では、熱変形情報取得動作は、基板3の基台11への搬送に並行して行なわれる。基板3の搬送が開始されると(ステップS11)、主制御部41は、ヘッド駆動機構7による駆動を制御して、メインカメラ91をベースマークBM1の上方に移動させる。こうして、ベースマークBM1の上方に位置したメインカメラ91はベースマークBM1を認識して、ベースマークBM1の映像は画像処理部44に送られて記憶される(ステップS12)。ステップS12と同様にして、メインカメラ91はベースマークBM2の認識(ステップS13)、およびベースマークBM3の認識(ステップS14)を行う。なお、これらのステップを実行している間に、基板3はX軸方向に搬送されている。こうして、画像処理部44は、各ベースマークBM1〜BM3の認識結果を得るとともに、これらの認識結果からヘッド駆動機構7の熱変形に関する熱変形情報を求める(ステップS15)。具体的には次の通りである。
In the present embodiment, the thermal deformation information acquisition operation is performed in parallel with the conveyance of the
まず、ステップS12〜S14で得られたベースマークBM1〜BM3の認識結果から、各ベースマークの位置座標P(BM1)、P(BM2)、P(BM3)が求められる。そして、位置座標P(BM1)、P(BM3)より、ベースマークBM1からベースマークBM3に向うベクトルaが求められる(式(1))。また、位置座標P(BM1)、P(BM2)より、ベースマークBM1からベースマークBM2に向うベクトルbが求められる(式(2))。 First, the position coordinates P (BM1), P (BM2), and P (BM3) of each base mark are obtained from the recognition results of the base marks BM1 to BM3 obtained in steps S12 to S14. Then, a vector a from the base mark BM1 to the base mark BM3 is obtained from the position coordinates P (BM1) and P (BM3) (formula (1)). Further, a vector b from the base mark BM1 to the base mark BM2 is obtained from the position coordinates P (BM1) and P (BM2) (formula (2)).
一方、メモリ42には、ヘッド駆動機構7に熱変形が発生していない場合における、ベースマークBM1からベースマークBM3に向うベクトルA(式(3))と、ベースマークBM1からベースマークBM2に向うベクトルB(式(4))とが記憶されている。
On the other hand, in the
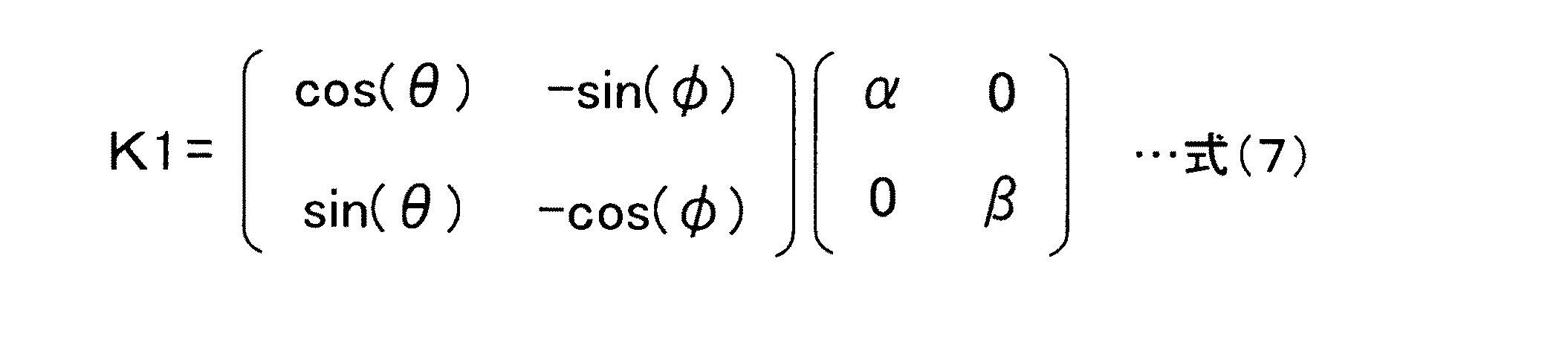
画像処理部44は、メモリ42から読み出したベクトルA、Bと、ベースマーク認識により求められたベクトルa、bとから、ヘッド駆動機構7の熱変形に関連する4種類のパラメータα、β、θ、φを求める。ここで、αはX軸方向の伸び率であり、βはY軸方向の伸び率であり、θはX軸方向の角度変化量であり、φはY軸方向の角度変化量である。具体的には、式(5)で与えられる変換行列K1が求められる。
The
式(5)を変換行列K1について解くと、式(6)が得られる。 When Equation (5) is solved for the transformation matrix K1, Equation (6) is obtained.
また、変換行列K1は、式(7)のように書き表すことができ、式(6)と式(7)とから、熱変形に関連するパラメータα、β、θ、φを求めることができる。 Further, the transformation matrix K1 can be expressed as in Expression (7), and parameters α, β, θ, and φ related to thermal deformation can be obtained from Expression (6) and Expression (7).
こうして、熱変形に関連するパラメータα、β、θ、φ(熱変形情報)が求められて、熱変形情報取得動作は終了する。これに続いて、フィデューシャルマークの認識動作が実行される。 Thus, the parameters α, β, θ, φ (thermal deformation information) related to thermal deformation are obtained, and the thermal deformation information acquisition operation ends. Subsequently, a fiducial mark recognition operation is performed.
図6は、フィデューシャルマーク認識動作を示すフローチャートである。また、図7は、フィデューシャルマーク認識動作における基板認識カメラの動作を示す平面図である。基板3の基台11への搬入動作が完了すると(ステップS21)、これに続いて基板3の対角に付された2つのフィデューシャルマークFM1、FM2がこの順番で認識される。主制御部41は、メインカメラ91、サブカメラ92のいずれのカメラがフィデューシャルマークFM1に近いかを判断し、近い方のカメラをフィデューシャルマークFM1の上方に移動させる。図7に示す例では、メインカメラ91がフィデューシャルマークFM1に近いため、メインカメラ91でマーク認識を行なうと判断される(ステップS22で「YES」と判断される)。また、メインカメラ91をフィデューシャルマークFM1上方に移動させるにあたって、主制御部41は、先ほど求めた熱変形に関連するパラメータα、β、θ、φに基づいて、ヘッド駆動機構7によるヘッドユニット6の駆動を較正する。これにより、ヘッド駆動機構7の熱変形に依らず、メインカメラ91をフィデューシャルマークFM1の上方に適切に移動することができる(ステップS23)。そして、メインカメラ91により、フィデューシャルマークFM1が認識される(ステップS24)。続くステップS25では、全てのフィデューシャルマークを認識し終えたかが判断される。ここでは、フィデューシャルマークFM2の認識が未実施であるため、ステップS22に戻る。
FIG. 6 is a flowchart showing the fiducial mark recognition operation. FIG. 7 is a plan view showing the operation of the substrate recognition camera in the fiducial mark recognition operation. When the operation of carrying in the
ステップS22では、メインカメラ91、サブカメラ92のいずれのカメラがフィデューシャルマークFM2に近いかが判断される。図7の例では、サブカメラ92がフィデューシャルマークFM2に近いため、サブカメラ92でマーク認識を行なうと判断される(ステップS22において「NO」と判断される)。また、サブカメラ92をフィデューシャルマークFM2上方に移動させるにあたって、主制御部41は、メモリ42に記憶されているカメラ91、92の相対位置情報(距離Cx、Cy)を読み出す。そして、主制御部41は、熱変形に関連するパラメータα、β、θ、φと距離Cx、Cyとに基づいてヘッド駆動機構7によるヘッドユニット6の駆動を較正する。これにより、ヘッド駆動機構7の熱変形に依らず、サブカメラ92をフィデューシャルマークFM2の上方に適切に移動することができる(ステップS26)。そして、サブカメラ92により、フィデューシャルマークFM2が認識される。続くステップS25では、全てのフィデューシャルマークを認識し終えたと判断されて(ステップS25で「NO」と判断されて)、フィデューシャルマーク認識動作が終了する。
In step S22, it is determined which of the
このように本実施形態では、実装制御ユニット4(制御手段)、ヘッド駆動機構7、ヘッドユニット6(ユニット)、メインカメラ91およびサブカメラ92が、本発明のマーク認識システムとして機能している。つまり、メインカメラ91(一のカメラ)が各ベースマークBM1〜BM3(較正用マーク)を認識し、このマーク認識結果からヘッド駆動機構7の熱変形に関する熱変形情報(パラメータα、β、θ、φ)が求められる。したがって、メインカメラ91によりフィデューシャルマーク(基板上マーク)の認識動作を行う場合は、この熱変形情報に基づいてメインカメラ91の駆動が較正されることで、ヘッド駆動機構7(駆動機構)の熱変形に依らずメインカメラ91をフィデューシャルマークの上方位置(認識可能位置)に適切に移動させることができる。こうして、熱変形に依らず、メインカメラ91によりフィデューシャルマークの位置を適切に認識することができる。
Thus, in this embodiment, the mounting control unit 4 (control means), the
一方、サブカメラ92(一のカメラ以外のカメラ)でフィデューシャルマークの認識を行う場合は、熱変形情報と、カメラ91、92の相対位置情報(距離Cx、Cy)とに基づいて、サブカメラ92の駆動が較正される。このように熱変形情報と相対位置情報とに基づいてサブカメラ92の駆動が較正されることで、ヘッド駆動機構7の熱変形に依らずサブカメラ92をフィデューシャルマークの上方位置(認識可能位置)に適切に移動させることができる。その結果、サブカメラ92によっても、熱変形に依らずフィデューシャルマークの位置を適切に認識することができる。つまり、この実施形態では、カメラ91、92の相対位置情報が活用されることで、サブカメラ92についてはベースマークBM1〜BM3の認識動作を行なわずとも、フィデューシャルマークの位置を適切に認識することができる。こうしてベースマークBM1〜BM3の認識動作を効率的に実行しつつ、全てのカメラ91、92についてフィデューシャルマークの位置を適切に認識することが可能となっている。
On the other hand, when the fiducial mark is recognized by the sub camera 92 (camera other than one camera), the sub camera 92 (camera other than one camera) recognizes sub- The drive of the
また、本実施形態では、Z軸方向(鉛直方向)上側から見て、基板3が基台11に搬送されてくる搬送経路31の外側に、複数のベースマークBM1〜BM3は設けられている(図1)。したがって、上述したように基板3の搬送を行なっている最中においても、基板3に邪魔されること無くメインカメラ91によりベースマークBM1〜BM3を認識することができる。よって、基板搬送実行中にベースマークBM1〜BM3の認識を行なうことで、効率的にベースマーク認識を行なうことが可能となっている。
In the present embodiment, a plurality of base marks BM1 to BM3 are provided outside the
また、本実施形態では、ベースマークBM1(BM2)とベースマークBM3とのそれぞれの位置は、X軸方向とY軸方向のいずれにおいても互いに異なっている。その結果、熱変形情報を高精度に求めることができ、フィデューシャルマークの位置をより適切に認識することが可能となっている。 In the present embodiment, the positions of the base mark BM1 (BM2) and the base mark BM3 are different from each other in both the X-axis direction and the Y-axis direction. As a result, the thermal deformation information can be obtained with high accuracy, and the position of the fiducial mark can be recognized more appropriately.
また、本実施形態では3個のベースマークBM1〜BM3が設けられている。しかも、3個のベースマークBM1〜BM3は一直線上にはなく、任意の2つのベースマークを通る直線から外れた位置に、残りの1つのベースマークは配置されている。具体例を挙げると、ベースマークBM1は、2つのベースマークBM2、BM3を通る直線の上には無く、2つのベースマークBM2、BM3を通る直線から外れた位置に配置されている。したがって、X軸方向またはY軸方向に対してリニアな熱変形成分(パラメータα、β)のみならず、回転方向の熱変形成分(パラメータθ、φ)についても求めることができる。よって、ヘッド駆動機構7の熱変形に関する熱変形情報を高精度に求めることができ、フィデューシャルマークの位置をより適切に認識することが可能となっている。
In the present embodiment, three base marks BM1 to BM3 are provided. Moreover, the three base marks BM1 to BM3 are not on a straight line, and the remaining one base mark is arranged at a position deviating from a straight line passing through any two base marks. As a specific example, the base mark BM1 is not on a straight line passing through the two base marks BM2 and BM3, and is arranged at a position deviating from the straight line passing through the two base marks BM2 and BM3. Therefore, not only the thermal deformation components (parameters α and β) linear with respect to the X-axis direction or the Y-axis direction but also the thermal deformation components (parameters θ and φ) in the rotation direction can be obtained. Therefore, it is possible to obtain the heat deformation information related to the heat deformation of the
また、本実施形態では、2台のカメラ91、92それぞれの位置は、X軸方向とY軸方向のいずれにおいても互いに異なるように構成されている。したがって、フィデューシャルマーク認識を効率的に実行することが可能となっている。
In the present embodiment, the positions of the two
また、本実施形態における表面実装機1は、上述のマーク認識システムを用いて、基台11上に搬送された基板3に対して部品を実装する。したがって、ベースマーク認識動作を効率的に実行して生産効率を高めつつ、全てのカメラ91、92についてフィデューシャルマークの位置を適切に認識することができ、高い位置精度でもって基板3上に部品実装を実行することが可能となっている。
Moreover, the surface mounter 1 in this embodiment mounts components with respect to the board |
なお、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したものに対して種々の変更を加えることが可能である。例えば、上記実施形態では、熱変形情報を求めるために3個のベースマークBM1〜BM3が設けられている。しかしながら、ベースマークの個数は3個に限られず、2個以上であれば良い。つまり、ベースマークBM1とベースマークBM3とのみを設けたような場合は、次のようにして熱変形情報を求めることができる。すなわち、変換行列K2は、式(8)で与えられる。 The present invention is not limited to the above-described embodiment, and various modifications can be made to the above-described one without departing from the spirit of the present invention. For example, in the above embodiment, three base marks BM1 to BM3 are provided in order to obtain thermal deformation information. However, the number of base marks is not limited to three and may be two or more. That is, when only the base mark BM1 and the base mark BM3 are provided, the thermal deformation information can be obtained as follows. That is, the transformation matrix K2 is given by equation (8).
また、変換行列は式(9)のように書き表せる。 Also, the transformation matrix can be written as in equation (9).
したがって、式(8)(9)から、熱変形に関連するパラメータα、βを求めることができる。 Therefore, parameters α and β related to thermal deformation can be obtained from the equations (8) and (9).
また、上記実施形態では、表面実装機に本発明のマーク認識システムを適用した場合について説明した。しかしながら、本発明のマーク認識システムの適用対象はこれに限られず、基板3に付された基板上マークを認識する装置全般に対して本発明は適用できる。例えば、基板3に対して半田を印刷する印刷機等においても、フィデューシャルマーク等の基板上マークが認識される場合があるため、このような印刷機に対して本発明を適用することもできる。
In the above embodiment, the case where the mark recognition system of the present invention is applied to a surface mounter has been described. However, the application target of the mark recognition system of the present invention is not limited to this, and the present invention can be applied to all apparatuses for recognizing marks on the substrate attached to the
また、上記実施形態では、フィデューシャルマークを基板上マークとして認識する装置について説明したが、フィデューシャルマーク以外のマークを基板上マークとして認識する装置に対しても、本発明を適用することができる。例えば、部品実装を効率的に行なうために、複数の小基板の集合である所謂多面取り基板に対して部品実装を行なうことが一般的に行なわれている。このような装置では、不良のある小基板に対して部品実装を行なわないようにするために、不良のある小基板にバッドマークが付される。そして、このバッドマークがカメラにより認識されて、不良のある小基板が検知されるとともに、バッドマークが付されていない小基板に対してのみ部品実装が行なわれる。そこで、バッドマークを基板上マークとして認識するこのような装置に対して、本発明を適用しても良い。 Moreover, although the said embodiment demonstrated the apparatus which recognizes a fiducial mark as a mark on a board | substrate, this invention is applied also to the apparatus which recognizes marks other than a fiducial mark as a mark on a board | substrate. Can do. For example, in order to perform component mounting efficiently, component mounting is generally performed on a so-called multi-sided board that is a set of a plurality of small boards. In such an apparatus, a bad mark is attached to a defective small board so as not to mount components on the defective small board. The bad mark is recognized by the camera, a defective small board is detected, and components are mounted only on the small board without the bad mark. Therefore, the present invention may be applied to such an apparatus that recognizes a bad mark as a mark on a substrate.
また、上記実施形態では、2台のカメラが設けられている。しかしながら、カメラの台数はこれに限られず、3台以上のカメラが設けられても良い。この場合であっても、メインカメラ91については、メインカメラ91を用いて求めた熱変形情報に基づいて駆動較正を行なうことで、基板上マークの位置を適切に認識することができる。また、メインカメラ以外のサブカメラについては、熱変形情報とカメラの相対位置情報とに基づいて駆動較正を行なうことで、基板上マークの位置を適切に認識することができる。
In the above embodiment, two cameras are provided. However, the number of cameras is not limited to this, and three or more cameras may be provided. Even in this case, the
また、上記実施形態では、2台のカメラ91、92それぞれの位置は、X軸方向とY軸方向のいずれにおいても互いに異なるように構成されている。しかしながら、カメラ91、92の配置はこれに限られず、例えば、Y軸方向においては、カメラ91、92の位置が同じであるように構成することもできる。
In the above embodiment, the positions of the two
また、上記実施形態では、ベースマークBM1、BM2、BM3は、Z軸方向上側から見て、基板3が搬送されてくる基板搬送経路31の外側に配置されている。しかしながら、ベースマークBM1、BM2、BM3の位置はこれに限れれず、例えば、Z軸方向上側から見て基板搬送経路31の内側にベースマークBM1、BM2、BM3のいずれか、あるいは全部を配置しても良い。
In the above embodiment, the base marks BM1, BM2, and BM3 are disposed outside the
1…表面実装機
11…基台
3…基板
31…基板搬送経路
4…実装制御ユニット(制御手段)
42…メモリ(記憶手段)
6…ヘッドユニット(ユニット)
7…ヘッド駆動機構(駆動機構)
751…ボールねじ軸
761…ボールねじ軸
762…ボールナット
91…メインカメラ
92…サブカメラ
BM1、BM2、BM3…ベースマーク
FM1、FM2…フィデューシャルマーク
Z…鉛直方向
Cx…X軸方向カメラ間距離(カメラの相対位置情報)
Cy…Y軸方向カメラ間距離(カメラの相対位置情報)
DESCRIPTION OF SYMBOLS 1 ...
42 ... Memory (storage means)
6. Head unit (unit)
7. Head drive mechanism (drive mechanism)
751 ...
Cy ... Y-axis camera-to-camera distance (camera relative position information)
Claims (8)
前記基台の鉛直方向上側で複数のカメラを保持するユニットと、
前記鉛直方向に直交する方向に前記ユニットを駆動する駆動機構と、
前記駆動機構による前記ユニットの駆動を制御して前記複数のカメラの相対位置関係を保持したまま前記カメラを移動させる制御手段と、
前記複数のカメラの相対位置関係に関する相対位置情報を記憶する記憶手段と
を備え、
前記制御手段は、前記複数のカメラのうちの一のカメラを前記各較正用マークの認識可能位置に移動させることで得られる前記複数の較正用マークの認識結果を用いて前記駆動機構の熱変形に関する熱変形情報を求め、
前記熱変形情報に基づき前記ユニットの駆動を較正することによって前記基台上の基板に付された基板上マークを認識可能な位置に前記一のカメラを移動させて前記基板上マークを認識し、
前記相対位置情報と前記熱変形情報とに基づき前記ユニットの駆動を較正することによって前記基板上マークを認識可能な位置に前記一のカメラ以外のカメラを移動させて前記基板上マークを認識することを特徴とするマーク認識システム。 A base having a plurality of calibration marks;
A unit for holding a plurality of cameras above the base in the vertical direction;
A drive mechanism for driving the unit in a direction orthogonal to the vertical direction;
Control means for controlling the drive of the unit by the drive mechanism and moving the camera while maintaining the relative positional relationship of the plurality of cameras;
Storage means for storing relative position information related to the relative positional relationship of the plurality of cameras,
The control means uses the recognition result of the plurality of calibration marks obtained by moving one of the plurality of cameras to a recognizable position of each of the calibration marks. For heat deformation information about
Calibrating the drive of the unit based on the thermal deformation information to move the one camera to a position where the mark on the substrate attached to the substrate on the base is recognizable to recognize the mark on the substrate;
Recognizing the on-board mark by moving a camera other than the one camera to a position where the on-board mark can be recognized by calibrating the drive of the unit based on the relative position information and the thermal deformation information. A mark recognition system characterized by
前記複数のカメラのうちの一のカメラを、前記基台に設けられた複数の較正用マークそれぞれの認識可能位置に移動させることで得られる前記複数の較正用マークの認識結果を用いて前記駆動機構の熱変形に関する熱変形情報を求め、
前記熱変形情報に基づき前記ユニットの駆動を較正することによって前記基台上の基板に付された基板上マークを認識可能な位置に前記一のカメラを移動させて前記基板上マークを認識し、
前記複数のカメラの相対位置関係に関する相対位置情報と前記熱変形情報とに基づき前記ユニットの駆動を較正することによって前記基板上マークを認識可能な位置に前記一のカメラ以外のカメラを移動させて前記基板上マークを認識することを特徴とするマーク認識方法。
By driving a unit holding a plurality of cameras on the upper side in the vertical direction of the base in a direction perpendicular to the vertical direction by a drive mechanism, the plurality of cameras are positioned at positions where the marks on the substrate can be recognized. In the mark recognition method, the camera is moved while maintaining the relative positional relationship, and the mark on the substrate is recognized by the camera.
The drive using the recognition result of the plurality of calibration marks obtained by moving one of the plurality of cameras to a recognizable position of each of the plurality of calibration marks provided on the base. Obtain thermal deformation information on the thermal deformation of the mechanism,
Calibrating the drive of the unit based on the thermal deformation information to move the one camera to a position where the mark on the substrate attached to the substrate on the base is recognizable to recognize the mark on the substrate;
The camera other than the one camera is moved to a position where the on-board mark can be recognized by calibrating the drive of the unit based on the relative position information on the relative positional relationship of the plurality of cameras and the thermal deformation information. A mark recognition method for recognizing the mark on the substrate.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008146509A JP4648964B2 (en) | 2008-06-04 | 2008-06-04 | Mark recognition system, mark recognition method, and surface mounter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008146509A JP4648964B2 (en) | 2008-06-04 | 2008-06-04 | Mark recognition system, mark recognition method, and surface mounter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009295709A true JP2009295709A (en) | 2009-12-17 |
| JP4648964B2 JP4648964B2 (en) | 2011-03-09 |
Family
ID=41543652
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008146509A Active JP4648964B2 (en) | 2008-06-04 | 2008-06-04 | Mark recognition system, mark recognition method, and surface mounter |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4648964B2 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236374A (en) * | 2011-05-13 | 2012-12-06 | Yamaha Motor Co Ltd | Printing apparatus |
| JP2013239517A (en) * | 2012-05-14 | 2013-11-28 | Yamaha Motor Co Ltd | Working device of component or substrate and surface mounting apparatus |
| WO2017130267A1 (en) * | 2016-01-25 | 2017-08-03 | 富士機械製造株式会社 | Component mounting apparatus |
| JP2017168619A (en) * | 2016-03-16 | 2017-09-21 | ヤマハ発動機株式会社 | Component loading method and component mounting device |
| JP2018032681A (en) * | 2016-08-23 | 2018-03-01 | ヤマハ発動機株式会社 | Component mounting machine, and reference mark imaging method |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015181905A1 (en) * | 2014-05-28 | 2015-12-03 | ヤマハ発動機株式会社 | Component mounting device and component mounting method |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006041260A (en) * | 2004-07-28 | 2006-02-09 | Juki Corp | Method for correcting nozzle position of electronic part mounting device |
| JP2007235019A (en) * | 2006-03-03 | 2007-09-13 | Matsushita Electric Ind Co Ltd | Method of recognizing position of electronic component, and electronic component mounter |
-
2008
- 2008-06-04 JP JP2008146509A patent/JP4648964B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006041260A (en) * | 2004-07-28 | 2006-02-09 | Juki Corp | Method for correcting nozzle position of electronic part mounting device |
| JP2007235019A (en) * | 2006-03-03 | 2007-09-13 | Matsushita Electric Ind Co Ltd | Method of recognizing position of electronic component, and electronic component mounter |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236374A (en) * | 2011-05-13 | 2012-12-06 | Yamaha Motor Co Ltd | Printing apparatus |
| JP2013239517A (en) * | 2012-05-14 | 2013-11-28 | Yamaha Motor Co Ltd | Working device of component or substrate and surface mounting apparatus |
| WO2017130267A1 (en) * | 2016-01-25 | 2017-08-03 | 富士機械製造株式会社 | Component mounting apparatus |
| US11083121B2 (en) | 2016-01-25 | 2021-08-03 | Fuji Corporation | Component mounting apparatus |
| JP2017168619A (en) * | 2016-03-16 | 2017-09-21 | ヤマハ発動機株式会社 | Component loading method and component mounting device |
| JP2018032681A (en) * | 2016-08-23 | 2018-03-01 | ヤマハ発動機株式会社 | Component mounting machine, and reference mark imaging method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4648964B2 (en) | 2011-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4828298B2 (en) | Component mounting method and component mounting apparatus | |
| JP4648964B2 (en) | Mark recognition system, mark recognition method, and surface mounter | |
| JP4657834B2 (en) | Component mounting method and surface mounter | |
| KR101051106B1 (en) | Electronic component mounting device and electronic component mounting method | |
| WO2015029209A1 (en) | Component mounting device, control method for same, and program for component mounting device | |
| WO2014174598A1 (en) | Component mounting device, mounting head, and control device | |
| JP2007012929A (en) | Method for checking interference of surface mounting machine, device for checking interference, surface mounting machine with the device and mounting system | |
| JP3744251B2 (en) | Electronic component mounting method | |
| EP2059112B1 (en) | Electronic component taking out apparatus, surface mounting apparatus and method for taking out electronic component | |
| JP4712819B2 (en) | Electronic component mounting method | |
| JP4651581B2 (en) | Component mounting method | |
| JP2009212251A (en) | Component transfer equipment | |
| JP2009170465A5 (en) | ||
| JP6572437B2 (en) | Component mounting apparatus and component mounting method | |
| JP4781945B2 (en) | Substrate processing method and component mounting system | |
| JP2016139750A (en) | Component mounting device and component mounting method | |
| JP5254875B2 (en) | Mounting machine | |
| JP4091950B2 (en) | Component mounting position correction method and surface mounter | |
| JP5999544B2 (en) | Mounting apparatus, mounting position correction method, program, and board manufacturing method | |
| JP5047772B2 (en) | Mounting board manufacturing method | |
| JP2003318600A (en) | Recognizing method and system for electronic component mounter | |
| JP3142720B2 (en) | Positioning method and device for mounting machine | |
| JP2009218461A (en) | Component mounting method | |
| JP3564191B2 (en) | Positioning method and device for mounting machine | |
| JP6498789B2 (en) | Mounting head movement error detection device and component mounting device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101026 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20101026 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20101201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4648964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |