JP2009261122A - Motor drive device and servo motor - Google Patents
Motor drive device and servo motor Download PDFInfo
- Publication number
- JP2009261122A JP2009261122A JP2008106731A JP2008106731A JP2009261122A JP 2009261122 A JP2009261122 A JP 2009261122A JP 2008106731 A JP2008106731 A JP 2008106731A JP 2008106731 A JP2008106731 A JP 2008106731A JP 2009261122 A JP2009261122 A JP 2009261122A
- Authority
- JP
- Japan
- Prior art keywords
- motor drive
- circuit
- motor
- power supply
- rigid substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Abstract
Description
この発明は、モータ駆動装置、およびこれを用いたサーボモータに関するものである。 The present invention relates to a motor drive device and a servomotor using the same.
一般に、サーボモータを駆動させるモータ駆動装置は、サーボモータに通電するモータ駆動部と、外部電源をモータ駆動部に供給するための電源回路部と、サーボモータの回転軸の回転角度に応じて通電の切換えタイミングを制御する制御部とを有している。
ここで、サーボモータのモータケースの一端に回転軸の回転角度を検出するための回転角度検出装置を設け、さらに、この回転角度検出装置のサーボモータとは反対側の端面にモータ駆動装置を配置したものがある。このように構成することで、サーボモータ、回転角度検出装置、およびモータ駆動装置を一体化し、サーボモータのシステム全体の小型、軽量化を図ろうとしている(例えば、特許文献1、特許文献2参照)。
Here, a rotation angle detection device for detecting the rotation angle of the rotation shaft is provided at one end of the motor case of the servo motor, and a motor drive device is disposed on the end surface opposite to the servo motor of the rotation angle detection device. There is what I did. With this configuration, the servo motor, the rotation angle detection device, and the motor drive device are integrated to reduce the size and weight of the entire servo motor system (see, for example,
しかしながら、上述の従来技術にあっては、回転角度検出装置やモータ駆動装置をただ単にモータケースの一端に配置しただけであるので、サーボモータ全体としては、モータ軸長が増大したり、モータ外径が大型化したりする。このため、サーボモータのレイアウト性が悪化するという課題がある。 However, in the above-described prior art, since the rotation angle detection device and the motor drive device are simply arranged at one end of the motor case, the servo shaft as a whole increases the motor shaft length, The diameter increases. For this reason, there exists a subject that the layout property of a servomotor deteriorates.
そこで、この発明は、上述した事情に鑑みてなされたものであって、さらに小型、軽量化を図ることができるモータ駆動装置、およびサーボモータを提供するものである。 Therefore, the present invention has been made in view of the above-described circumstances, and provides a motor drive device and a servo motor that can be further reduced in size and weight.
上記の課題を解決するために、請求項1に記載した発明は、各相のコイルへの通電の切換えを行うブリッジ回路を有するモータ駆動部と、外部電源が接続され前記モータ駆動部に電流を供給する電源回路部とを備え、前記電源回路部は、外部制御装置の制御信号に基づいて前記モータ駆動部に所定の電流を所定の通電切換えタイミングで供給するように構成されているモータ駆動装置であって、前記モータ駆動部をモータ軸を挿通可能な環状の第一リジット基板に実装すると共に、前記電源回路部を前記モータ軸を挿通可能な環状の第二リジット基板に実装し、これら第一リジット基板と第二リジット基板とをフレキシブル基板を介して連結したことを特徴とする。
このように構成することで、モータ駆動部が実装されている第一リジット基板と、電源回路部が実装されている第二リジット基板とをモータ軸の各軸端内にモータ軸を取り囲むように配置することが可能になる。
In order to solve the above problems, the invention described in
With this configuration, the first rigid board on which the motor drive unit is mounted and the second rigid board on which the power supply circuit unit is mounted are surrounded by the motor shaft within each shaft end of the motor shaft. It becomes possible to arrange.
請求項2に記載した発明は、前記電源回路部に前記モータ軸の回転角度を検出するための回転角度検出装置を設け、前記回転角度検出装置の検出結果に基づいて、前記外部制御装置が通電切換えタイミングを決定することを特徴とする。
このように構成することで、モータ軸の回転角度を検出するための回転角度検出装置を別途設ける必要がなく、回転角度検出装置とモータ駆動装置とを一体化することができる。このため、回転角度検出装置の占有スペースを小さくすることができる。
According to a second aspect of the present invention, a rotation angle detection device for detecting a rotation angle of the motor shaft is provided in the power supply circuit unit, and the external control device is energized based on a detection result of the rotation angle detection device. The switching timing is determined.
With this configuration, it is not necessary to separately provide a rotation angle detection device for detecting the rotation angle of the motor shaft, and the rotation angle detection device and the motor drive device can be integrated. For this reason, the space occupied by the rotation angle detection device can be reduced.
請求項3に記載した発明は、請求項1または請求項2に記載のモータ駆動装置をモータハウジングの一端側に設け、前記フレキシブル基板を湾曲形成して前記第一リジット基板と前記第二リジット基板とを対向配置したことを特徴とするサーボモータとした。
このように構成することで、小型で軽量なサーボモータを提供することが可能になる。
According to a third aspect of the present invention, the motor drive device according to the first or second aspect is provided on one end side of the motor housing, and the flexible substrate is curved to form the first rigid substrate and the second rigid substrate. And a servo motor characterized by being arranged opposite to each other.
With this configuration, a small and lightweight servo motor can be provided.
請求項1に記載した発明によれば、モータ駆動部が実装されている第一リジット基板と、電源回路部が実装されている第二リジット基板とをモータ軸の各軸端内にモータ軸を取り囲むように配置することが可能になる。このため、モータ駆動装置をサーボモータの一端側に配置した場合であっても、従来よりもモータ軸長を短くすることができる。 According to the first aspect of the present invention, the motor shaft is mounted in each shaft end of the motor shaft by connecting the first rigid substrate on which the motor drive unit is mounted and the second rigid substrate on which the power supply circuit unit is mounted. It becomes possible to arrange so that it may surround. For this reason, even if it is a case where a motor drive device is arrange | positioned at the one end side of a servomotor, motor shaft length can be shortened conventionally.
請求項2に記載した発明によれば、モータ軸の回転角度を検出するための回転角度検出装置を別途設ける必要がなく、回転角度検出装置とモータ駆動装置とを一体化することができる。このため、回転角度検出装置の占有スペースを小さくすることができる。よって、モータ全体の小型化を図ることが可能になる。
According to the invention described in
請求項3に記載した発明によれば、小型で軽量なサーボモータを提供することが可能になる。
According to the invention described in
次に、この発明の実施形態を図面に基づいて説明する。
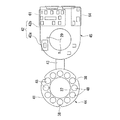
図1、図2に示すように、サーボモータ1は、筒状のハウジング2と、このハウジング2に内嵌固定された固定子3と、固定子3に対して回転自在に設けられた回転子4とを有し、ハウジング2の前端面(図1、図2における左側端)をフロントブラケット5で閉塞すると共に、ハウジング2の後端面(図1、図2における右側端)をエンドブラケット6で閉塞している。また、回転子4のエンドブラケット6側にサーボモータ1を駆動させるための駆動装置7が設けられている。
Next, embodiments of the present invention will be described with reference to the drawings.
As shown in FIGS. 1 and 2, the
ハウジング2の外周面には、フロントブラケット5側の周縁に段差によって縮径された縮径部15が形成されている一方、エンドブラケット6側の周縁に段差によって拡径された拡径部17が形成されている。
On the outer peripheral surface of the
固定子3は、磁性材料の板材を軸線方向に積層したり、磁性金属粉体を加圧したり(圧粉磁心)することで形成されたものであって、略円筒状の固定子鉄心8を有している。固定子鉄心8は、周壁を形成するコア本体9と、コア本体9から径方向内側に向かって突設された複数のティース部10とが一体成形されたものである。
The
コア本体9は、固定子鉄心8の環状の磁路を形成する部分であり、かつハウジング2の内周面に内嵌固定される部分である。
一方、各ティース部10は、巻線11を巻装する部分であって、周方向に等間隔で設けられている。ティース部10は、軸線方向平面視略T字状に形成されている。各ティース部10には、それぞれインシュレータ12が装着され、このインシュレータ12を介して各ティース部10に巻線11が巻装されている。
The
On the other hand, each
回転子4は、回転軸13と、この回転軸13に外嵌固定されている略円筒状のリングマグネット14とを備えている。回転軸13の一端には、センサマグネット28が取付け部材26を介して設けられている。センサマグネット28は、回転軸13の回転角度を検出するためのエンコーダ30の一方を構成するものであって、2極に着磁されている。取付け部材26は、回転軸13の外嵌固定されている筒部26aと、筒部26aの外側端に設けられた外フランジ部26bとが一体成形されたものである。外フランジ部26bは、センサマグネット28の軸線方向の位置決めを行うためのものである。センサマグネット28は、この一端面が外フランジ部26bに当接するようにして固定されている。
The rotor 4 includes a
リングマグネット14は、周方向に磁極が順番に変わるように着磁されている。このような構成のもと、固定子3のティース部10に巻装されている巻線11に電流が流れると磁界が形成され、この磁界とリングマグネット14との間に生じる磁気的な吸引力や反発力によって回転軸13が回転する。
The
フロントブラケット5は略円盤状に形成されたものであって、外周縁にハウジング2の縮径部15に勘合する嵌合部20が設けられている。
また、フロントブラケット5には、雌ネジ部21が3箇所周方向に等間隔で刻設されている(図1参照)。フロントブラケット5の径方向中央には、軸受けハウジング23が形成されており、ここに回転軸13の他端を回転自在に支持するための軸受け22が設けられている。
The
The
エンドブラケット6は略円盤状に形成されたものであって、外周部に内側に向かって立ち上がるように形成された筒部27が設けられている。筒部27の先端には、ハウジング2の拡径部17に対応するようにインロー部31が形成されている。このインロー部31がハウジング2に内嵌されることにより、エンドブラケット6の位置決めが行われる。
The
エンドブラケット6の筒部27よりも内側には、フロントブラケット5の雌ネジ部21に対応する部位にボルト孔(不図示)が形成されている。そして、エンドブラケット6、およびフロントブラケット5は、ボルト18をボルト孔側から挿入し、雌ネジ部21に螺入することによって、ハウジング2を挟持した形で締結固定されるようになっている。
A bolt hole (not shown) is formed in a portion corresponding to the
エンドブラケット6の径方向中央には軸受けハウジング33が形成されており、ここに回転軸13の一端側を回転自在に支持するための軸受け34が設けられている。
また、エンドブラケット6の外周寄りには、後述する駆動装置7のフレキシブル基板43を配索するための開口部35が形成されている。
A bearing
Further, an
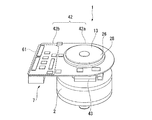
図2〜図6に示すように、駆動装置7は、略円環状に形成されガラスエポキシなどの硬い材質から成る第一リジット基板41と、円環部42aと矩形部42bとが一体成形されガラスエポキシなどの硬い材質から成る第二リジット基板42と、これらリジット基板41,42を連結する可撓可能なフレキシブル基板43とを有している。
なお、図3、図4は駆動装置7の平面図であって、図3は表面の構成を示し、図4は裏面の構成を示している。
As shown in FIGS. 2 to 6, the driving
3 and 4 are plan views of the
第一リジット基板41は、回転軸13の各軸端内であって、かつエンドブラケット6よりも軸線方向内側に配置されており、固定子3のティース部10に巻装されている各巻線11の端末部(巻き始め端、および巻き終わり端)11aが接続されている。すなわち、第一リジット基板41の径方向中央に形成されている孔37の直径は、回転軸13を挿通可能な大きさに設定されていると共に、第一リジット基板41の外径は、エンドブラケット6の筒部27の内径よりも小さく設定されている。
また、第一リジット基板41には、周方向に等間隔で切り欠き部38が形成されており、これによって第一リジット基板41と各ブラケット5,6を固定するためのボルト18との干渉を回避できるようになっている。
The first
Further, the first
一方、第二リジット基板42は、回転軸13の各軸端内であって、かつエンドブラケット6の軸線方向外側にあると共に、回転軸13の一端に設けられたセンサマグネット28よりも軸線方向内側に配置されている。第二リジット基板42は、スタッドボルト39を介してエンドブラケット6に固定されている。第二リジット基板42の円環部42aに形成されている孔40の直径も回転軸13を挿通可能な大きさに設定されている。
On the other hand, the second
フレキシブル基板43は、第一リジット基板41と第二リジット基板42の円環部42aとの間に配索されている。すなわち、第一リジット基板41と第二リジット基板42は、フレキシブル基板43を湾曲させることでエンドブラケット6を挟んで対向配置された状態になっている。
The
ここで、図3、図4、図7、図8に示すように、第一リジット基板41には、固定子3のティース部10に巻装された各巻線11へ電流を供給するモータ駆動部44が実装されている。
モータ駆動部44は、第一リジット基板41の表面に実装されている複数のプリドライブ回路46、および電流センサ47や、第一リジット基板41の裏面に実装されている複数のスイッチング素子48などを有している。
Here, as shown in FIGS. 3, 4, 7, and 8, a motor driving unit that supplies current to each winding 11 wound around the
The
スイッチング素子48は、FET(Field Effect Transistor;電界効果型トランジスタ)等のトランジスタとFET(トランジスタ)のドレイン−ソース間の逆流を防止するダーオードとをモータ駆動電源E1に対して並列に接続した構成を有している(図7、図8参照)。FETとしてはベアチップが用いられ、このベアチップを樹脂モールドすることによって、FETの占有スペースの縮小化を図っている(図4参照)。
The switching
スイッチング素子48は、隣接する4つのスイッチング素子48を用いて相毎のHブリッジ回路を形成している。すなわち、図7に示すように、この実施形態のサーボモータ1は、U,V,W相の3相モータの駆動を想定しているので、U相の巻線11に電流を供給する第一ブリッジ回路51と、V相の巻線11に電流を供給する第二ブリッジ回路52と、W相の巻線11に電流を供給する第三ブリッジ回路53をそれぞれスイッチング素子48を4つずつ用いて形成している。
The switching
より具体的には、図8に示すように、第一ブリッジ回路51は、2つのスイッチング素子48をモータ駆動電源E1に対して直列に接続して1つのアーム54を形成し、このアーム54をモータ駆動電源E1に対して2つ並列に接続して構成されている。各アーム54,54のスイッチング素子48,48の間の中点には、U相の巻線11の端末部がそれぞれ接続されている。
More specifically, as shown in FIG. 8, the first bridge circuit 51 connects two switching
各アーム54のスイッチング素子48は、それぞれプリドライブ回路46に接続されている。プリドライブ回路46は、各スイッチング素子48のON/OFFを制御するものである。U相の巻線11には、プリドライブ回路46によって各スイッチング素子48のONとOFFとを切換えることで所望の向きの電流が流れる。
The switching
第二ブリッジ回路52、および第三ブリッジ回路53も第一ブリッジ回路51と同様の構成を有している。第二ブリッジ回路52の各アーム54,54には、スイッチング素子48,48の間の中点にV相の巻線11の端末部がそれぞれ接続されている。第三ブリッジ回路53の各アーム54,54には、スイッチング素子48,48の間の中点にW相の巻線11の端末部がそれぞれ接続されている。
The second bridge circuit 52 and the third bridge circuit 53 have the same configuration as the first bridge circuit 51. Each
図7に示すように、巻線11の端末部と各ブリッジ回路51,52,53との間に電流センサ47が設けられている。この電流センサ47は、各相電流(巻線電流)を検出するためのものである。電流センサ47は、各相電流(巻線電流)の検出信号を第二リジット基板42に出力している。
この他に、モータ駆動部44には、温度センサ65が設けられている。温度センサ65は、第一リジット基板41の温度を検出するためのものである。
このように構成された第一リジット基板41は、スイッチング素子48を固定子3側に向けた状態で配設されている(図2参照)。
As shown in FIG. 7, a
In addition, the
The first
第二リジット基板42には、モータ駆動部44に所望の電流を供給する電源回路部45が実装されている。このため、第一リジット基板41と第二リジット基板42は、互いがフレキシブル基板43で接続されている他に、モータ駆動電源E1の電力を電源回路部45からモータ駆動部44へと供給するためのリード線71が接続されている(図1、図2参照)。なお、リード線71に代わってピンヘッダを設けてもよい。
電源回路部45は、第二リジット基板42の表面に実装されているモータ駆動電源コネクタ56、制御回路電源コネクタ57、電源平滑用のアルミ電解コンデンサ58、絶縁インターフェイス回路59、および内部電源回路60や、第二リジット基板42の裏面に実装されている通信回路61、ホール素子29、回転角度検出回路63、過電流検出回路64などを有している。
A power
The power
また、電源回路部45には、モータ駆動電源コネクタ56を介してモータ駆動電源E1が接続され、制御回路電源コネクタ57を介して各回路を駆動させるための制御回路電源E2が接続されている。さらに、電源E1,E2の他にサーボモータ1の駆動を制御するECU回路基板55が接続されている。
Further, the motor drive power supply E1 is connected to the power
アルミ電解コンデンサ58は、整流された電流の中に含まれている脈流をより直流に近い状態に平滑化するための回路である。アルミ電解コンデンサ58は、モータ駆動電源コネクタ56と接続されている。すなわち、モータ駆動電源E1は、モータ駆動電源コネクタ56、およびアルミ電解コンデンサ58を介してモータ駆動部44の各ブリッジ回路51,52,53に平滑化された電流を供給するようになっている。
The aluminum
内部電源回路60は、駆動装置7を構成している各回路を駆動させるための回路であって、制御回路電源コネクタ57に接続されている。すなわち、制御回路電源E2は、制御回路電源コネクタ57、および内部電源回路60を介して各回路に電力を供給するようになっている。
The internal
ホール素子29は、回転軸13の回転角度を検出するためのエンコーダ30の他方を構成するものである。ホール素子29は、センサマグネット28に対応する部位であって、かつ回転軸13を中心に周方向に90°間隔をあけて第二リジット基板42の円環部42aに設けられている(図4参照)。すなわち、この実施形態のサーボモータ1は、回転軸13の回転角度を検出するためのエンコーダを別途設ける必要がなく、駆動装置7にエンコーダ30を組み込んだ状態になっている。
The
ホール素子29は、センサマグネット28から発生する磁界の変化を示す情報として検出し、それぞれ90°位相のずれた正弦波アナログ信号を回転角度検出回路63に出力する。回転角度検出回路63は、ホール素子29からの出力信号に基づいて回転軸13の回転角度を検出し、通信回路61に出力する。
また、電源回路部45は、A/Dコンバータ回路66を備えており、モータ駆動部44に設けられた電流センサ47から出力される各相電流(巻線電流)の検出信号がA/Dコンバータ回路66を介して通信回路61に出力される。
The
In addition, the power
通信回路61は、LVDS(Low Voltage Differential Signaling)方式に則った差動信号に変換して信号通信を行うものであって、回転角度検出回路63からの出力信号、温度センサ65からの出力信号、および電流センサ47からA/Dコンバータ回路66を介して出力される各相電流(巻線電流)の検出信号をECU回路基板55に出力すると共に、ECU回路基板55から出力される制御信号に基づいて絶縁インターフェイス回路59を介してPWM(パルス幅変調)信号をプリドライブ回路46に出力する。
The
ECU回路基板55は、駆動装置7とは別に外部に設けられた制御装置であって、LVDS方式に則った差動信号に変換して信号通信を行う通信回路67と、通信回路67に接続されたサーボ制御回路68とを有している。さらに、サーボ制御回路68は、通信回路69を介して上位制御装置に接続されている。
サーボ制御回路68は、回転角度検出回路63からの出力信号、温度センサ65からの出力信号、および電流センサ47からA/Dコンバータ回路66を介して出力される各相電流(巻線電流)の検出信号に基づいて適正なPWM(パルス幅変調)信号を通信回路67,61、絶縁インターフェイス回路59を介してプリドライブ回路46に出力している。
The
The
絶縁インターフェイス回路59は、インターフェイス間(通信回路61−絶縁インターフェイス回路59間)の信号電圧系の縁を切るものである。
絶縁インターフェイス回路59には、通信回路61からの信号が入力される他に、過電流検出回路64からの出力信号が入力される。過電流検出回路64は、モータ駆動電源ラインに設けられた抵抗Rを有しており、ここで検出される電流値を絶縁インターフェイス回路59に出力している。絶縁インターフェイス回路59は、この過電流検出回路64により検出された電流値が予め設定されている閾値を超えた場合にプリドライブ回路46へのPWM信号の出力を停止するフェールセーフ回路の役割も有している。
The
In addition to the signal from the
プリドライブ回路46は、絶縁インターフェイス回路59からの出力信号に基づいて各スイッチング素子48のON/OFFを制御している。
このように構成された第二リジット基板42は、表面が第一リジット基板41側に向くように配設されている(図1、図3、図6参照)。
The
The second
ここで、エンドブラケット6には、第二リジット基板42に実装されているアルミ電解コンデンサ58に対応する部位に開口部70が形成されている。この開口部70を形成することによって、アルミ電解コンデンサ58とエンドブラケット6との干渉を回避することができると共に、第二リジット基板42をよりエンドブラケット6側に配設できるようになっている。
Here, an
次に、この実施形態の作用について説明する。
駆動装置7には、モータ駆動電源E1、および制御回路電源E2から電源回路部45に電力が供給される。電源回路部45では、内部電源回路60を通して各回路に制御回路電源E2の電力が供給される。一方、モータ駆動電源E1はアルミ電解コンデンサ58を介してモータ駆動部44に供給される。
Next, the operation of this embodiment will be described.
Power is supplied to the power
モータ駆動部44の各ブリッジ回路51,52,53に電流を供給し、サーボモータ1の回転軸13を回転させると、U相、V相、W相の各巻線11に流れる電流がモータ駆動部44の電流センサ47で検出される。各相U,V,Wの電流値は、アナログ信号となってA/Dコンバータ回路66に入力される。A/Dコンバータ回路66は、アナログ信号をパルス状のデジタル信号に変換して通信回路61にシリアル出力する。
また、電流センサ47の電流検出と同時に電源回路部45のホール素子29から回転角度検出回路63を介して回転角度検出信号が通信回路61に出力される。さらに、温度センサ65による第一リジット基板41の温度検出信号も通信回路に出力される。
When current is supplied to each bridge circuit 51, 52, 53 of the
Simultaneously with the current detection of the
各出力信号は、通信回路11からECU回路基板55に出力される。ECU回路基板55では、通信回路67に入力された信号をサーボ制御回路68に出力する。サーボ制御回路68では、各出力信号に基づいて巻線11への通電切り替えのタイミングと通電相の決定とを行う。これによって、各相U,V,Wに対応したPWM信号が出力される。これらPWM信号は、通信回路67,61、および絶縁インターフェイス回路59を介してモータ駆動部44に出力される。
Each output signal is output from the
モータ駆動部44では、絶縁インターフェイス回路59からプリドライブ回路46に各PWM信号が入力され、各ブリッジ回路51,52,53のスイッチング素子48のON、OFF制御が行われる。スイッチング素子48がONされた経路に接続されたサーボモータ1の巻線11には、モータ駆動電源E1からの電流が流れる。これによって、対応するサーボモータ1の所定の相U,V,Wに電流が流れて回転軸13が回転させられる。
In the
したがって、上述の実施形態によれば、モータ駆動部44が実装されている第一リジット基板41と、電源回路部45が実装されている第二リジット基板42とを回転軸13の各軸端内であって、回転軸13を取り囲むように配置することが可能になる。このため、駆動装置7を従来のようにサーボモータ1のハウジング2一端側に配置した場合であっても、モータ軸長を短くすることができる。
Therefore, according to the above-described embodiment, the first
また、回転軸13の回転角度を検出するためのホール素子62、および回転角度検出回路63を第二リジット基板42に実装しているので、従来のように別体の回転角度検出装置(エンコーダ)を設ける必要がなく、エンコーダ30と駆動装置7とを一体化することができる(図2参照)。このため、エンコーダ30の占有スペースを小さくすることができる。よって、サーボモータ1全体の小型、軽量化を図ることが可能になる。
Further, since the Hall element 62 for detecting the rotation angle of the
1 サーボモータ
2 ハウジング
3 固定子
4 回転子
5 フロントブラケット
6 エンドブラケット
7 駆動装置(モータ駆動装置)
13 回転軸(モータ軸)
28 センサマグネット
29 ホール素子
30 エンコーダ(回転角度検出装置)
41 第一リジット基板
42 第二リジット基板
42a 円環部
42b 矩形部
43 フレキシブル基板
44 モータ駆動部
45 電源回路部
48 スイッチング素子
51 第一ブリッジ回路(ブリッジ回路)
52 第二ブリッジ回路(ブリッジ回路)
53 第三ブリッジ回路(ブリッジ回路)
54 アーム
55 ECU回路基板(外部制御装置)
E1 モータ駆動電源
E2 制御回路電源
DESCRIPTION OF
13 Rotating shaft (motor shaft)
28
41 First
52 Second bridge circuit (bridge circuit)
53 Third bridge circuit (bridge circuit)
54
E1 Motor drive power supply E2 Control circuit power supply
Claims (3)
外部電源が接続され前記モータ駆動部に電流を供給する電源回路部とを備え、
前記電源回路部は、外部制御装置の制御信号に基づいて前記モータ駆動部に所定の電流を所定の通電切換えタイミングで供給するように構成されているモータ駆動装置であって、
前記モータ駆動部をモータ軸を挿通可能な環状の第一リジット基板に実装すると共に、前記電源回路部を前記モータ軸を挿通可能な環状の第二リジット基板に実装し、
これら第一リジット基板と第二リジット基板とをフレキシブル基板を介して連結したことを特徴とするモータ駆動装置。 A motor drive unit having a bridge circuit for switching energization to the coils of each phase;
An external power supply is connected and a power supply circuit section for supplying current to the motor drive section,
The power supply circuit unit is a motor drive device configured to supply a predetermined current to the motor drive unit at a predetermined energization switching timing based on a control signal of an external control device,
The motor drive unit is mounted on an annular first rigid substrate that can be inserted through a motor shaft, and the power supply circuit unit is mounted on an annular second rigid substrate that can be inserted through the motor shaft.
A motor driving device characterized in that the first rigid substrate and the second rigid substrate are connected via a flexible substrate.
前記回転角度検出装置の検出結果に基づいて、前記外部制御装置が通電切換えタイミングを決定することを特徴とする請求項1に記載のモータ駆動装置。 A rotation angle detection device for detecting a rotation angle of the motor shaft is provided in the power supply circuit unit,
The motor drive device according to claim 1, wherein the external control device determines an energization switching timing based on a detection result of the rotation angle detection device.
前記フレキシブル基板を湾曲形成して前記第一リジット基板と前記第二リジット基板とを対向配置したことを特徴とするサーボモータ。
The motor drive device according to claim 1 or 2 is provided on one end side of the motor housing,
A servo motor, wherein the flexible substrate is curved and the first rigid substrate and the second rigid substrate are arranged to face each other.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008106731A JP2009261122A (en) | 2008-04-16 | 2008-04-16 | Motor drive device and servo motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008106731A JP2009261122A (en) | 2008-04-16 | 2008-04-16 | Motor drive device and servo motor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009261122A true JP2009261122A (en) | 2009-11-05 |
Family
ID=41387822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008106731A Pending JP2009261122A (en) | 2008-04-16 | 2008-04-16 | Motor drive device and servo motor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009261122A (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010099823A (en) * | 2008-09-29 | 2010-05-06 | Hitachi Koki Co Ltd | Power tool |
| JP2013138610A (en) * | 2013-04-10 | 2013-07-11 | Denso Corp | Electrically driven device |
| JP2014191854A (en) * | 2013-03-28 | 2014-10-06 | Rohm Co Ltd | Motor drive device |
| WO2017046841A1 (en) * | 2015-09-14 | 2017-03-23 | ルネサスエレクトロニクス株式会社 | Electronic device |
| WO2019065337A1 (en) * | 2017-09-29 | 2019-04-04 | 日本電産サーボ株式会社 | Motor |
| WO2019065336A1 (en) * | 2017-09-29 | 2019-04-04 | 日本電産サーボ株式会社 | Motor |
| JP2020099123A (en) * | 2018-12-18 | 2020-06-25 | Kyb株式会社 | Rotary electric machine |
| JP2020115713A (en) * | 2019-01-17 | 2020-07-30 | 日本電産モビリティ株式会社 | Motor control device |
-
2008
- 2008-04-16 JP JP2008106731A patent/JP2009261122A/en active Pending
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010099823A (en) * | 2008-09-29 | 2010-05-06 | Hitachi Koki Co Ltd | Power tool |
| JP2014191854A (en) * | 2013-03-28 | 2014-10-06 | Rohm Co Ltd | Motor drive device |
| JP2013138610A (en) * | 2013-04-10 | 2013-07-11 | Denso Corp | Electrically driven device |
| WO2017046841A1 (en) * | 2015-09-14 | 2017-03-23 | ルネサスエレクトロニクス株式会社 | Electronic device |
| JPWO2017046841A1 (en) * | 2015-09-14 | 2017-11-16 | ルネサスエレクトロニクス株式会社 | Electronic equipment |
| US10566879B2 (en) | 2015-09-14 | 2020-02-18 | Renesas Electronics Corporation | Electronic device |
| WO2019065336A1 (en) * | 2017-09-29 | 2019-04-04 | 日本電産サーボ株式会社 | Motor |
| WO2019065337A1 (en) * | 2017-09-29 | 2019-04-04 | 日本電産サーボ株式会社 | Motor |
| CN111052571A (en) * | 2017-09-29 | 2020-04-21 | 日本电产伺服有限公司 | Motor with a stator having a stator core |
| CN111052571B (en) * | 2017-09-29 | 2022-06-28 | 日本电产伺服有限公司 | Motor |
| JP2020099123A (en) * | 2018-12-18 | 2020-06-25 | Kyb株式会社 | Rotary electric machine |
| JP7231398B2 (en) | 2018-12-18 | 2023-03-01 | Kyb株式会社 | Rotating electric machine |
| JP2020115713A (en) * | 2019-01-17 | 2020-07-30 | 日本電産モビリティ株式会社 | Motor control device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009261122A (en) | Motor drive device and servo motor | |
| US7663277B2 (en) | Inner-rotor-type brushless motor having built-in bus bar | |
| US10243432B2 (en) | Rotation angle detection device | |
| JP5942967B2 (en) | Drive device | |
| JP3614380B2 (en) | Electric power steering device | |
| JP2010104212A (en) | Brushless motor | |
| US9344023B2 (en) | Motor device | |
| US7323835B2 (en) | Brushless DC motor actuator having remote commutation sensing apparatus | |
| WO2012120588A1 (en) | Motor drive device | |
| JP2011200022A (en) | Electric drive unit and electric power steering device equipped with the same | |
| JP2010011637A (en) | Permanent magnet rotary electric machine and elevator winding machine using the same | |
| EP2715921B1 (en) | Motor assembly comprising a brushless dc motor with control electronics | |
| JP2007062433A (en) | Electric power steering device | |
| JP2005229721A (en) | Motor for electric power steering device | |
| JP2011041355A (en) | Motor having built-in drive circuit | |
| JP2007101480A (en) | Resolver | |
| JP2007101301A (en) | Resolver reference position adjustment method | |
| JP2011083063A (en) | Drive controller and motor unit | |
| JP2007132862A (en) | Magnetic encoder | |
| JP5204554B2 (en) | motor | |
| JP5125434B2 (en) | Motor and electric power steering device | |
| JP5523044B2 (en) | Drive control device and motor unit | |
| JP2009005530A (en) | Brushless motor and printed circuit board therefor | |
| JP5566470B2 (en) | Electric power steering motor | |
| KR101180560B1 (en) | Brushless motor with built-in current sensors |