JP2009246700A - 撮像装置 - Google Patents
撮像装置 Download PDFInfo
- Publication number
- JP2009246700A JP2009246700A JP2008091095A JP2008091095A JP2009246700A JP 2009246700 A JP2009246700 A JP 2009246700A JP 2008091095 A JP2008091095 A JP 2008091095A JP 2008091095 A JP2008091095 A JP 2008091095A JP 2009246700 A JP2009246700 A JP 2009246700A
- Authority
- JP
- Japan
- Prior art keywords
- image data
- area
- focus
- controller
- tracking area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Landscapes
- Studio Devices (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Abstract
【課題】本発明は追尾機能を備える撮像装置において、受付手段が合焦指示を受け付けた場合に、より精度の高い合焦を行なうことのできる撮像装置を提供する。
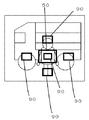
【解決手段】被写体像を形成する光学系と、被写体像を撮像して、画像データを生成するCCDと、CCDで生成される画像データ内で画像データの部分的特徴を示す特徴情報を検索し、特徴情報の検索結果に基づいて画像データ内の一部である追尾領域50を順次移動させるコントローラと、画像データ内における追尾領域50の位置に応じて、画像データ内に合焦領域90を設定するコントローラと、合焦指示を受け付けるシャッタスイッチと、シャッタスイッチが合焦指示を受け付けると、追尾領域50および合焦領域90内の画像データに基づいて、被写体像に合焦状態を調整するように光学系を制御するコントローラと、を備える。
【選択図】図3
【解決手段】被写体像を形成する光学系と、被写体像を撮像して、画像データを生成するCCDと、CCDで生成される画像データ内で画像データの部分的特徴を示す特徴情報を検索し、特徴情報の検索結果に基づいて画像データ内の一部である追尾領域50を順次移動させるコントローラと、画像データ内における追尾領域50の位置に応じて、画像データ内に合焦領域90を設定するコントローラと、合焦指示を受け付けるシャッタスイッチと、シャッタスイッチが合焦指示を受け付けると、追尾領域50および合焦領域90内の画像データに基づいて、被写体像に合焦状態を調整するように光学系を制御するコントローラと、を備える。
【選択図】図3
Description
本発明は、被写体に対する追尾機能を備える撮像装置に関する。例えば、追尾機能を備えるデジタルカメラ、ビデオカメラなどに適用可能である。
従来の撮像装置としては、下記の特許文献1に記載されるようなものが存在する。
この撮像装置は、被写体像を形成する光学系と、光学系によって形成された被写体像を撮像して画像データを生成する撮像手段と、生成された画像データのうち追尾領域内の被写体像(追尾対象となる被写体)の特徴を抽出する抽出手段と、抽出された被写体像の特徴に基づいて、被写体像の相対的な移動を検出する検出手段と、当該検出された被写体像の相対的な移動に応じて、追尾領域を移動させる追尾領域移動手段と、を備えるものである。
特開昭60−254108号公報
ところで、このような追尾機能を備える撮像装置が、追尾領域内の被写体に合焦状態を調整して撮影を行う場合、追尾対象となっていた被写体に合焦を調整できない場合がある。図1を用いて例を説明する。例えば、撮像装置が、追尾領域内の被写体に対して追尾動作を行なっていたとする。この場合、撮像装置は、シャッタスイッチが全押しされると、シャッタスイッチが全押しされた時点のフレームにおいて、追尾動作を停止し、合焦状態を調整する。このように構成した場合、シャッタスイッチの全押し時に、追尾対象となる被写体が動くと、追尾領域から被写体像が外れてしまう。これによって、撮像装置は合焦を背景に調整してしまい、被写体にピントが合っていない画像データを撮影してしまう。
そこで本発明は、上記課題を解決するために、追尾機能を備える撮像装置において、受付手段が合焦指示を受け付けた場合に、より精度の高い合焦を行なうことのできる撮像装置を提供することを目的とする。
すなわち、本発明は、被写体像を形成する光学系と、前記形成された被写体像を撮像して、画像データを順次生成する撮像手段と、前記撮像手段で生成される画像データ内で画像データの部分的特徴を示す特徴情報を検索し、前記特徴情報の検索結果に基づいて前記画像データ内の一部である追尾領域を順次移動させる追尾領域移動手段と、前記画像データ内における前記追尾領域の位置に応じて、前記画像データ内に合焦領域を設定する合焦領域設定手段と、合焦指示を受け付ける受付手段と、前記受付手段が前記合焦指示を受け付けると、前記合焦領域内の画像データに基づいて、前記被写体像に合焦状態を調整するように前記光学系を制御するオートフォーカス制御手段と、を備える。
このようにすれば、受付手段が合焦指示を受け付けると、追尾領域の位置に応じた合焦領域に基づいて、合焦状態を調整できるので、被写体が追尾領域から外れた場合であっても、合焦領域によって、被写体に合焦状態を調整できる。
また、好ましくは、前記オートフォーカス手段は、前記受付手段が合焦指示を受け付けると、前記追尾領域内の画像データおよび/または前記合焦領域内の画像データに基づいて、前記被写体像に合焦状態を調整するように前記光学系を制御する。
さらに、好ましくは、前記オートフォーカス制御手段は、前記受付手段が合焦指示を受け付けるまでに前記追尾領域移動手段が前記追尾領域を移動させることができたかどうかに応じて、前記光学系を制御する際に用いる画像データとして、前記合焦領域内の画像データを用いるか否かを決定する。
このようにすれば、追尾領域移動手段が追尾領域を移動できたかどうかに応じて、合焦領域内の画像データを用いるか否かを決定するようにしたので、被写体が追尾領域から外れた可能性が高い場合に、合焦領域を利用することができ、より確実に被写体に合焦状態を調整できる。また、追尾領域を移動できたかどうかに応じて、合焦状態を利用しない場合も判断するようにしたので、この場合については、より短時間で合焦状態を調整できるようになる。
また、好ましくは、前記オートフォーカス制御手段は、前記追尾領域移動手段が追尾領域を移動させると、前記追尾領域内の画像データに基づいて、前記被写体像の合焦状態を調整するように前記光学系を制御する一方、前記受付手段が合焦指示を受け付けると、合焦領域内の画像データに基づいて、前記被写体像に合焦状態を調整するように前記光学系を制御する。
このようにすれば、追尾動作時に焦点が調整された被写体までの距離を利用して、合焦状態を調整できるので、受付手段が合焦指示を受け付けた時の被写体のおおよその位置を予測して、合焦状態を調整できる。これは、追尾動作時の被写体が存在した位置と、次のフレーム(画像データ)の被写体の位置が、それほど大きな違いはないであろうとの予測に基づく。これによって、合焦状態の調整に必要なフォーカスレンズの駆動をより少なくすることができる。
さらに、好ましくは、前記オートフォーカス制御手段は、前記受付手段が合焦指示を受け付けると、前記合焦領域内の画像データのコントラスト情報、および、以前の画像データにおいて、前記追尾領域移動手段が追尾領域を移動させた際に合焦した被写体までの距離に基づく被写界深度に応じて、前記被写体像に対する合焦状態を調整するように前記光学系を制御する。
このようにすれば、被写界深度に基づいて、合焦状態を調整するようにしたので、合焦時に被写体が追尾領域から外れてしまったとしても、より精度の高い合焦を行なうことができる。
本発明によれば、追尾機能を備える撮像装置において、受付手段が合焦指示を受け付けた場合に、より精度の高い合焦を行なうことができる。
(実施の形態1)
1.構成
以下、本発明の一実施の形態について、図面を参照して説明する。
1.構成
以下、本発明の一実施の形態について、図面を参照して説明する。
1−1 全体構成の概要
図2は、本実施の形態に係るデジタルカメラ1の斜視図である。図3は、本実施の形態に係るデジタルカメラ1の構成を示すブロック図である。以下、具体的に構成を説明する。
図2は、本実施の形態に係るデジタルカメラ1の斜視図である。図3は、本実施の形態に係るデジタルカメラ1の構成を示すブロック図である。以下、具体的に構成を説明する。
光学系11は、被写体からの光学信号を集光してCCDイメージセンサー12上に被写体像を形成する。光学系11は、対物レンズ111とズームレンズ112とフォーカスレンズ113と絞り/シャッタ114とを含む。
ズームレンズ112は、ズーム駆動部115によって駆動され、被写体像の写る範囲(画角)を調整する。すなわち、ズームレンズ112は、焦点距離を調整可能である。フォーカスレンズ113は、フォーカス駆動部116によって駆動され、ピントの調節を行なう。ズーム駆動部115は、ズームレンズ112を移動するためのカム機構やカム機構を駆動するためのアクチュエータなどを備えて構成され、コントローラ17からの制御に応じて、ズームレンズ112を駆動させる。フォーカス駆動部116は、フォーカスレンズ113を移動するためのカム機構やカム機構を駆動するためのアクチュエータなどを備えて構成され、コントローラ17からの制御に応じて、フォーカスレンズ113を駆動させる。
また、絞り/シャッタ114は、絞りとシャッタを兼用した部材である。絞り/シャッタ114は、絞り/シャッタ駆動部117によって駆動される。絞りは、5枚の羽根によって構成され、光学系11を通る光の量を調整するものである。また、シャッタは、開けたり閉じられたりして、CCDイメージセンサー12に当たる光の量を時間的に調整するものである。絞り/シャッタ駆動部117は、カム機構やカム機構を駆動するためのアクチュエータなどを備えて構成され、コントローラ17からの制御に応じて、絞り/シャッタを駆動する。
なお、本実施の形態では、絞りとシャッタを兼用した絞り/シャッタ114を備えるようにしたが、これに限られず、絞りとシャッタとを別々に設けるようにしても良い。この場合、例えば、シャッタは光学系内に設けず、絞りだけを光学系に設けるとよい。この際、シャッタは、光学系とCCDイメージセンサーの間に設けるとよい。このようにすれば、シャッタを光学系と別の部材で設けたので、レンズ交換タイプのデジタルカメラにも適用できるようになる。
CCDイメージセンサー12は、光学系11によって形成された被写体像を撮像して画像データを生成する撮像手段である。CCDイメージセンサー12は、タイミングジェネレータ121から供給されるパルス信号に基づいて、被写体像を撮像し、画像データを生成する。タイミングジェネレータ121は、LSIなどの集積回路によって構成され、CCDイメージセンサー12にパルス信号を供給する。ここでタイミングジェネレータ121がCCDイメージセンサー12に供給するパルス信号は、例えば、1秒間に30回のフレーム読み出しパルス信号を供給する。これによって、CCDイメージセンサー12では、30分の1秒ごとのフレームの画像データを取得できるようになる。
ADコンバータ13は、CCDイメージセンサー12で生成された画像データをデジタルデータに変換する。
画像処理部14は、デジタルデータに変換された画像データに対して所定の処理を施す。所定の処理としては、ガンマ変換、YC変換、電子ズーム処理、圧縮処理、伸張処理などが考えられるが、これに限定されるものではない。
バッファメモリ15は、画像処理部14で画像処理を行う際、および、コントローラ17で制御処理を行う際に、ワークメモリとして作用する。バッファメモリ15は、例えば、DRAMなどで実現可能である。
フラッシュメモリ16は、内蔵メモリとして用いられる。フラッシュメモリ16は、画像データが画像処理された画像データの他に、コントローラ17の制御のためのプログラムや設定値などを記憶可能である。
コントローラ17は、デジタルカメラ1全体を制御するための制御手段である。コントローラ17は、マイクロコンピュータで実現してもよく、ハードワイヤードな回路で実現しても良い。要するに、本発明の制御手段は、自装置を制御できるものであればよい。なお、コントローラ17の各種制御については、後述する。
ぶれ検出器30は、ジャイロセンサーなどで構成されるものであり、自装置の振動を検出する振動検出手段である。ぶれ検出器30は、デジタルカメラ1の水平軸を中心とした上下方向の回転振動を検知する第1のジャイロセンサーと、デジタルカメラ1の鉛直軸を中心とした左右方向の回転振動を検知する第2のジャイロセンサーとを備える。そして、ぶれ検出器30は、自装置の振動を検知して、振動量に対応するアナログ信号をコントローラ17に出力する。この際、ぶれ検出器30から出力されたアナログ信号(電圧値)は、AD変換手段によってデジタル信号に変換され、コントローラ17に入力される。ここで本実施の形態の振動量は、デジタルカメラ1の振幅の大きさに対応させたものである。そのため、電圧値の大きさは、振幅の大きさに対応するように構成されている。本実施の形態では、振幅のピークとピークの差の大きさを出力するようにしている。例えば、出力値としては、280mV(pk-pk)や、130mV(pk-pk)などが出力される。
カードスロット18は、メモリカード19を着脱するためのスロットである。カードスロット18は、メモリカード19を制御する機能を有するようにしてもよい。メモリカード19は、フラッシュメモリなどを内蔵する。メモリカード19は、画像処理部14によって画像処理された画像データを格納可能である。
タッチパネル20は、液晶モニタと、マトリクススイッチを組み合わせて構成される。この液晶モニタは、画像データおよびデジタルカメラ1の各種設定等を表示する表示手段である。本発明の表示手段としては、液晶モニタに替えて、有機ELディスプレイなどを用いることもできる。また、このマトリクススイッチは、表示手段に表示された表示画像に、使用者がタッチ操作を行なった場合、タッチ操作に対応する位置の情報(操作信号)をコントローラ17に出力するタッチセンサである。なおタッチセンサは、マトリクススイッチに替わる方式として、抵抗膜を設ける抵抗膜方式や圧電素子を取り付けたガラス板を設ける表面弾性波方式を取ることができる。なお、本実施の形態では、タッチパネル20を備えるようにしたが、これに限られず、液晶モニタだけで構成するようにしてもよい。この場合、使用者が操作部を操作することによって、デジタルカメラに対する各種操作を受け付ける。
操作部21は、デジタルカメラ1の外装に取り付けられた操作部材の総称である。操作部21としては、十字キーや押下釦等が考えられる。
本実施の形態では、操作部の一つの押下釦として、シャッタスイッチ211がある。シャッタスイッチ211は、デジタルカメラ1の上面に設けられるものであり、使用者からの半押しおよび全押しを検知できるようにしたものである。使用者によって半押し又は全押し操作が行なわれると、シャッタスイッチ211は操作に応じた操作信号をコントローラ17に出力する。すなわち、シャッタスイッチ211は、合焦指示を受け付ける受付手段である。なお、受付手段は、シャッタスイッチのような操作部材に限られない。例えば、受付手段は、コントローラであってもよい。この場合、コントローラが自動で合焦指示の情報を生成し、この情報をコントローラ自身が受け付けるようにすればよい。要するに、受付手段は、合焦指示を受け付けるものであれば、どのような手段であってもかまわない。
また本実施の形態では、操作部21の一つの部材としてズームリング212が備えられている。ズームリング212は、使用者からの操作に応じて、デジタルカメラ1の焦点距離を変更するものである。ズームリング212は、使用者に操作されると、操作信号をコントローラ17に出力する。これによって、コントローラ17は、ズームレンズ112に対して焦点距離を変更するための制御信号を送ることができる。
1−2 本実施の形態におけるコントローラ17の制御の説明
本実施の形態におけるコントローラ17は、追尾領域移動制御と、合焦領域設定制御と、オートフォーカス制御と、撮影制御を行なう。すなわち、実施の形態1においてコントローラ17は、追尾領域移動手段、および、合焦領域設定手段、オートフォーカス手段、撮影手段である。
本実施の形態におけるコントローラ17は、追尾領域移動制御と、合焦領域設定制御と、オートフォーカス制御と、撮影制御を行なう。すなわち、実施の形態1においてコントローラ17は、追尾領域移動手段、および、合焦領域設定手段、オートフォーカス手段、撮影手段である。
追尾領域移動手段を実現するコントローラ17は、CCDイメージセンサー12で生成される画像データ内で画像データの部分的特徴を示す色情報(特徴情報)を検索し、色情報の検索結果に基づいて、画像データ内の一部である追尾領域を順次移動するものである。
合焦領域設定手段を実現するコントローラ17は、画像データ内における追尾領域の位置に応じて、画像データ内に合焦領域を設定するものである。
オートフォーカス手段を実現するコントローラ17は、コントローラ17が追尾領域を移動させると、追尾領域内の画像データに基づいて、被写体像の合焦状態を調整するように光学系11を制御するものである。すなわち、コントローラ17は、追尾領域内の画像データに対して合焦状態を継続的に維持するものである。また、このコントローラ17は、シャッタスイッチが全押し操作を受け付けると、追尾領域内の画像データおよび/または合焦領域内の画像データに基づいて、被写体像に合焦状態を調整するように光学系11を制御するものである。
撮影手段を実現するコントローラ17は、絞り/シャッタ駆動部117を制御して、絞り/シャッタ114を駆動する。また、タイミングジェネレータ121を制御して、CCDイメージセンサー12を制御する。これによって、コントローラ17は、CCDイメージセンサー12の露出状態を制御し、CCDイメージセンサー12に画像データを撮像させる。この後、CCDイメージセンサー12で生成された画像データは、画像処理部14で様々な画像処理が行われる。そして、コントローラ17が、画像処理が行なわれた画像データを、メモリカード19に記憶する。これによって、コントローラは、撮影処理を実現している。
以下、具体的に制御を説明する。
1−2−1 追尾領域移動制御
コントローラ17は、画像データにおいて追尾領域50が設定された被写体に対し、追尾動作を行なうものである。そしてコントローラ17は、追尾動作を可能にするため、下記の処理を可能にする。すなわち、コントローラ17は、追尾領域設定と、色記憶と、検索領域取得と、色情報検索と、移動判別と、動き量検出と、制限フィルタと、追尾領域移動の処理を可能にする。以下具体的に説明する。
コントローラ17は、画像データにおいて追尾領域50が設定された被写体に対し、追尾動作を行なうものである。そしてコントローラ17は、追尾動作を可能にするため、下記の処理を可能にする。すなわち、コントローラ17は、追尾領域設定と、色記憶と、検索領域取得と、色情報検索と、移動判別と、動き量検出と、制限フィルタと、追尾領域移動の処理を可能にする。以下具体的に説明する。
追尾領域設定処理は、画像データ内に含まれる被写体像に追尾領域50を設定するものである。したがって、コントローラ17は、画像処理部14から受け取った画像データを表示画面80として液晶モニタに表示させる(図4)。そしてコントローラ17は、使用者から表示画面80がタッチ操作された場合、タッチ操作された位置に対応する画像データ内の被写体像に追尾領域50を設定する。ここで表示画面80がタッチ操作された場合、マトリクススイッチではタッチ操作された位置をコントローラ17に出力する。そしてコントローラ17は、タッチ操作された位置に対応する画像データ内の被写体に追尾領域50を設定する。なお、コントローラ17は、追尾領域が設定された画像データを表示画面81として、液晶モニタに表示させる(図5)。
色記憶処理は、追尾領域50内の画像データの色情報を記憶媒体に記憶するものである。ここで記憶媒体としては、バッファメモリ15、フラッシュメモリ16、メモリカード19などが考えられるが、これに限れない。色記憶処理を実現するコントローラ17は、追尾領域50内の画像データを取得する(図6(A))。そしてコントローラ17は、追尾領域50内の画像データの色情報を取得する。ここで色情報は、色相の色空間で表現する。すなわち、色相は、0〜360度の位相角として角度により表すことができる。ここで色空間がHSV色空間の場合、図7のように、R=0/G=120/B=240の位置関係で表現できる。例えば、該当色が図7のように位置する場合、該当色の角度は、θとなる。これによって、例えば、図6(A)の追尾領域50内の画像データでは、図6(B)のヒストグラムで表現できる。ここでヒストグラムの横軸は、角度(度)を表しており、縦軸は、追尾領域内に存在する各色相の画素の数を表している。横軸は、Minが0度であり、Maxが359度である。このようにして取得された追尾領域50の色情報をコントローラ17は、バッファメモリ15またはフラッシュメモリ16、メモリカード19などの記憶媒体に記憶する。好ましくは、追尾領域の色情報をデジタルカメラ1に内蔵された記憶媒体に記憶する。このようにすれば、追尾領域の色情報の読み出し時間を短くすることができる。なお、色相はスペクトル上での色の位置で表すことも可能である。この場合、光の波長を300nm~780nmで表現することで可能となる。
検索領域取得処理は、追尾領域50および追尾領域50周辺の画像データを含む検索領域60内の画像データを取得するものである。すなわち、コントローラ17は、検索領域60内の画像データを取得する。例えば、検索領域60は、追尾領域50の9倍(縦3倍・横3倍)の大きさで構成されている(図8)。
色情報検索処理は、検索領域60内の画像データにおいて、追尾領域50と同じ形状、同じ大きさで、かつ、記憶媒体に記憶された追尾領域50の色情報と最も近似する領域70を検索するものである。したがって、コントローラ17は、記憶媒体に記憶された追尾領域50の色情報を読み出す。そしてコントローラ17は、読み出した追尾領域50の色情報と、色情報が最も近似する領域70を、検索領域60内の画像データから検索する。
ここで最も近似する領域70の検索方法は、検索するための領域(判別領域)を利用して、以下の方法で実現可能である。
まずコントローラ17は、検索領域60内の左端上端の判別領域(a)内における画像データを取得する(図9)。そしてコントローラ17は、取得した画像データの色情報を解析する。ここで判別領域は、追尾領域50と同じ形状で、同じの大きさである。判別領域(a)内の画像データの色情報を解析したコントローラ17は、判別領域(a)内の色情報を、現在最も近似する領域の色情報として記憶媒体に記憶する。
次に、コントローラ17は、判別領域を1画素右にずらし、判別領域(b)内の色情報を取得する(図9)。そしてコントローラ17は、判別領域(b)内の色情報と、記憶された現在最も近似する領域の色情報(判別領域(a)内の色情報)と、を比較し、どちらが追尾領域50内の色情報に近似するかを判別する。
ここで追尾領域50内の色情報に近似すると判別された色情報が、判別領域(b)内の色情報である場合、コントローラ17は、判別領域(b)内の色情報を、記憶媒体に記憶する。一方、追尾領域50内の色情報に近似すると判別された色情報が、記憶された現在最も近似する領域(判別領域(a)内の色情報)である場合、判別領域を1画素右にずらし、次の領域の判別を行なう。これらの処理を繰り返すことによって、検索領域60内の検索を行なう。なお、コントローラ17は、判別領域が検索領域60の右端上端に到達した場合、1画素下げて、左端からまた検索を行なう(図10)。
これらの処理を繰り返すことによって、コントローラ17は、検索領域60全体を検索できる。したがって、コントローラ17は、追尾領域50の色情報に、最も近似する領域を検索できる。すなわち、検索終了時に、記憶媒体に記憶されている判別領域が、最も近似する領域70となる。これによってコントローラ17は、最も近似する領域70を検索できる。
次に、コントローラ17が、記憶された現在最も近似する色情報(例えば、判別領域(a)内の色情報)と、判別領域(b)内の色情報とを比較し、どちらが追尾領域50内の色情報に近似するかを判別する際の判別方法を説明する。判別方法は、色情報のヒストグラムに基づいて、抽出される曲線の近似度を求めることで、判別できる。すなわち、ある曲線と、他の曲線とのユークリッド距離(近似度)を測ることによって可能である。なお、ユークリッド距離d(f,g)は、距離尺度であり、ベクトル量fとgに対して、下記の数式1で算出できる。

したがって、コントローラ17は、追尾領域50内の色情報と判別領域(a)内の色情報とのユークリッド距離と、追尾領域50内の色情報と対象領域(b)内の色情報とのユークリッド距離を比較して、ユークリッド距離が小さい方を、現在最も近似する色情報として判別する。
なお、本実施の形態では、現在最も近似する領域として判別された判別領域内の色情報を記憶媒体に記憶するようにしているが、これに限られない。例えば、ユークリッド距離のような近似度を記憶媒体に記憶するようにしてもよい。このようにすれば、記憶された現在最も近似する領域の色情報と追尾領域の色情報とのユークリッド距離の算出をしなくてすむ。
また、判別領域内の色情報を現在最も近似する領域の色情報として記憶する際に、判別領域の位置情報を最も近似する領域の位置情報として記憶媒体に記憶するとよい。このようにすれば、コントローラ17が検索領域内の検索を終了した時に、記憶媒体から情報を読み出すだけで、最も近似する領域の位置情報を取得できるようになる。ここで最も近似、する領域の位置情報として記憶する判別領域の位置情報は、判別領域の左端上端の位置情報を記憶しておくとよい。これによって、検索終了時に、記憶された現在最も近似する領域の位置情報が、追尾領域50を移動するための移動位置となる(図11)。すなわち、図11の現在最も近似する領域が、検索領域内の最も近似する領域70となる。
移動判別処理は、追尾領域を移動させるか否かを判別するものである。本実施の形態では、検索領域内の最も近似する領域70の色情報と、記憶媒体に記憶された色情報が、ユークリッド距離換算で所定値未満か否かを判別する。所定値未満の場合、コントローラ17は、追尾領域を移動させる。一方、所定値以上の場合、追尾領域を移動させない。なお、所定値は、特に限定されない。すなわち、移動判別処理は、追尾領域を移動させるか否かを、判別できるものであれば、どのような処理であってもかまわない。このように構成すれば、たとえば、色情報検索処理での検索結果の精度が低い場合、追尾領域の移動を取りやめることができる。これによって、撮像装置は、全体として精度の高い追尾動作を行なうことができる。
動き量検知処理は、移動判別処理で追尾領域を移動させると判断した場合に、CCDイメージセンサー12で撮像している被写体像の動きを検出するものである。したがって、コントローラ17は、追尾領域50が設定されている位置情報と、追尾領域50を移動するための移動位置(最も近似する領域70の位置情報)と、の関係を利用して、動き量を算出する。ここで動き量は、横方向と縦方向の画素の差分(画素数)で表現できる。例えば、図12では、追尾領域50の左端上端の位置情報(x1,y1)と、最も近似する領域70の左端上端の位置情報(x2,y2)との関係によって、動き量は、(x1−x2,y1−y2)となる。x1,x2は、横方向の画素の位置を示しており、y1,y2は、縦方向の画素の位置を示している。この場合、画素の位置を説明するための基準点は、取得された画像データの左端下端で実現できる。すなわち、左端下端の画素は、位置情報(0,0)として設定される。また、この場合、右および上方向の画素がプラスの位置情報になるようにすればよい。なお、追尾領域移動手段が行う動き量検出は、上記実施の形態に限られず、被写体像の動きを検出できるものであればどのような方法であってもかまわない。
制限フィルタ処理は、ぶれ検出器30で検出された振動の大きさに応じて、被写体像の動きの大きさに制限フィルタをかけるものである。すなわち、コントローラ17は、ぶれ検出器30から入力された振動量(左右方向・上下方向)に応じて、動き量検知処理で算出した動き量に制限フィルタをかける。ここで制限フィルタは、当該スレッシュよりも小さい前記被写体像の動きを制限するものである。したがって、当該被写体像の動きの大きさを0に変換する。これによって、被写体像の動きに制限をかけることができ、追尾領域が安定しないような状態では、追尾領域の移動を停止できる。
具体的に左右方向の振動量に応じて、動き量に制限フィルタをかける処理を説明する。まずコントローラ17は、振動量(左右方向)に応じて、制限フィルタのスレッシュ(閾値)を決定する。制限フィルタのスレッシュは、計算式や対応表によって決定することができる。例えば、対応表としては、図13に示すような対応表(左右方向・上下方向)を用いることができる。この場合、例えば、図14のように振動量(左右方向)が280mVである場合、スレッシュは、追尾領域の横方向の大きさの20%となる。例えば、追尾領域のサイズが、縦20画素×横20画素である場合、4画素がスレッシュとなる。図13の対応表において、対応表にない振動量(例えば300mV)に関しては、線形補間によってスレッシュを求めるようにしている。
ここで図13の対応表は、振動量が大きくなるほど、スレッシュが大きくなるように構成している。このようにすれば、デジタルカメラの振動に応じた、追尾領域の安定を行なうことができる。これは、デジタルカメラが振動していれば、画像データもそれに合わせて移動しているであろうとの考えに基づく。
但し、本発明は、これに限られない、例えば、撮像装置の振動が小さい環境の方が、追尾領域が見づらいものとなるため、撮像装置の振動が小さい状態では、追尾領域の移動を制御するように構成し、それ以外については、追尾領域の移動を制御しないように構成してもよい。この場合、図18の対応表を用いることができる。この場合、撮像装置の振動が小さい状態である第1の領域が0〜280mVであり、それ以外の状態である第2の領域が281mV〜ぶれ検出器の出力限界値となる。なお、280mVは、一般的な使用者が使用した場合において、この程度のシャイロセンサーの出力となるシステム構成の場合の例である。第1の領域と第2の領域を隣接するようにしているが、これに限られず、第1の領域の最大値が第2の領域の最小値よりも大きいものであれば、どのような構成であってもかまわない。
次にコントローラ17は、この制限フィルタのスレッシュに基づいて、動き量に制限フィルタをかける。例えば、図14の現在の2フレーム前において、スレッシュが、4画素で、動き量が、3画素である場合、スレッシュよりも、動き量の大きさが小さいため、動き量が0画素に変換される。これによって、追尾領域の動きが制限される。一方、スレッシュと動き量が同じ、又は、スレッシュよりも、動き量が大きい場合は、取得した動き量をそのまま動き量とする。例えば、図14のように、スレッシュが、4画素で、動き量が、6画素である場合、スレッシュよりも、動き量の大きさが大きいため、動き量は6画素のままにしておく。なお、本実施の形態では、左右方向と上下方向とも振動量に対して同じ基準でスレッシュを決定しているが、これに限られない。
追尾領域移動処理は、制限フィルタ処理で決定された被写体像の動きの大きさに応じて、追尾領域50を移動させるものである。すなわち、コントローラ17は、追尾領域50の位置情報と、変換後の動き量によって、追尾領域50を移動させる(図15の表示画面82)。
これらの手段によって、追尾制御を可能にしている。なお、追尾制御の動作は、後述する。
1−2−2 合焦領域設定制御
コントローラ17は、図19のように、画像データ内における追尾領域50の位置に応じて、画像データ内に合焦領域90を設定する。ここでコントローラ17は、追尾領域50を移動させた後に、合焦領域90を設定する。このようにすれば、シャッタスイッチ211が合焦指示を受け付けた後、次のフレーム(画像データ)に対して直ちに合焦処理に移れる。そのため、デジタルカメラは、撮影までのタイムラグをより少なくすることができる。なお、本実施の形態では、合焦領域を設定する時点を、追尾領域を移動させた後に設定するようにしたが、これに限られない。例えば、図20のように、シャッタスイッチが合焦指示を受け付けた後に、合焦領域を設定するようにしてもよい。
コントローラ17は、図19のように、画像データ内における追尾領域50の位置に応じて、画像データ内に合焦領域90を設定する。ここでコントローラ17は、追尾領域50を移動させた後に、合焦領域90を設定する。このようにすれば、シャッタスイッチ211が合焦指示を受け付けた後、次のフレーム(画像データ)に対して直ちに合焦処理に移れる。そのため、デジタルカメラは、撮影までのタイムラグをより少なくすることができる。なお、本実施の形態では、合焦領域を設定する時点を、追尾領域を移動させた後に設定するようにしたが、これに限られない。例えば、図20のように、シャッタスイッチが合焦指示を受け付けた後に、合焦領域を設定するようにしてもよい。
ここで追尾領域の位置に応じて、設定される合焦領域について説明する。本実施の形態における合焦領域90は、例えば、追尾領域50の位置に対して、左右方向に設けている(図19)。このようにすれば、被写体は左右方向に移動する可能性が高いため、被写体に合焦できる可能性が高くなる。なお、合焦領域は、これに限らない。例えば、図21のように、追尾領域50と重畳する位置に合焦領域90を設けるようにしてもよい。また、図22のように、追尾領域50よりも小さい領域を設けるようにしてもよい。このようにすれば、追尾領域が大きいことによって、背景などに合焦を合わせてしまう背景抜けなどをより防止できる。さらに、図23のように、特徴情報に基づいて、顔領域を追跡している場合、縦長の合焦領域90を設けるとよい。このようにすれば、顔領域は縦長になるため、他の被写体に領域が移動されるといったことをより防止できる。
1−2−3 合焦制御
コントローラ17は、CCDイメージセンサー12で撮像している追尾領域内の被写体像の合焦状態を調整するために、光学系11を制御する。本実施の形態におけるコントローラ17は、合焦状態を制御するため、以下の処理を行う。なお、コントローラ17は、山登り方式(コントラスト方式)のオートフォーカス手段によって合焦状態を調整するものである。
コントローラ17は、CCDイメージセンサー12で撮像している追尾領域内の被写体像の合焦状態を調整するために、光学系11を制御する。本実施の形態におけるコントローラ17は、合焦状態を制御するため、以下の処理を行う。なお、コントローラ17は、山登り方式(コントラスト方式)のオートフォーカス手段によって合焦状態を調整するものである。
コントローラ17は、予め設定されたフォーカスレンズ113の稼動範囲で、フォーカスレンズ113を稼動させる。これに伴って、コントローラ17は、画像処理部14から画像データを連続的に取得する。そして、コントローラ17は、画像処理部14から連続的に入力された画像データ(追尾領域内)を解析する。この際、コントローラ17は、入力された画像に対して、画像の境界の明瞭さや微細な部分の描写能力を表す度合いである鮮鋭度を算出する。そしてコントローラ17は、連続的にされる画像の中から、最も鮮鋭度が最大となる画像を選択する。次に、コントローラ17は、選択された画像が取得できるフォーカスレンズ113の位置を検出し、フォーカスレンズ113の現在位置に基づいて、フォーカスレンズ113の移動量を決定する。フォーカスレンズ113の移動量が決定されると、フォーカスレンズ113を移動するため、フォーカスレンズ駆動部116に移動量を含む信号を出力する。なお、フォーカスレンズ113の現在位置の検出方法は、どのような方法であってもよいが、好ましくは、フォーカスレンズ113に位置センサを設け、光学系11におけるフォーカスレンズ113の現在位置を検出し、この現在位置の情報をコントローラ17に出力するようにするとよい。
ここでコントローラ17は、合焦状態を継続的に維持するように光学系11を制御するため、CCDイメージセンサー12によって取得される画像データに対して、追尾制御を行なっている間、合焦状態を調整し続ける。これはデジタルカメラ1で一般的に用いられているコンティニュアスAFと呼ばれるものである。コンティニュアスAFを、コントラスト方式のAFで実現する場合、例えば、特開2003−140035号公報に記載された技術によって実現可能である。具体的には、例えば、段落0012〜段落0016等に記載されたメインのAF処理によって可能である。
これによって、デジタルカメラ1は、被写体に対して合焦状態を継続的に維持できる。
また、コントローラ17は、シャッタスイッチ211が全押し操作を受け付けると、追尾領域50内の画像データおよび/または合焦領域90内の画像データに基づいて、被写体像に合焦状態を調整するように光学系11を制御するものである。具体的に説明する。コントローラ17は、図24の左の図で追尾動作が行なわれた後に、シャッタスイッチ211が全押しされると、CCDイメージセンサー12が生成した画像データ(次のフレーム)を取得する。そしてコントローラ17は、取得した画像データに、追尾領域50および合焦領域90を設定し、各々の領域内の画像データのコントラストを検波する。そして、コントローラ17は、この検波されたコントラストおよび直前のフレームでの被写界深度に基づいて、合焦状態を調整するためフォーカスレンズ113を制御する。ここで被写界深度は、焦点距離、絞り径(絞りの調整状態)、デジタルカメラから被写体までの距離に基づいて得られるものである。そのため、直前のフレームでの被写界深度は、図24の左の図では、例えば、追尾領域50内で合焦された人物の位置をセンターとして得られる被写体深度である。
次に、コントラストおよび被写界深度に基づいて、合焦状態を調整する方法を説明する。コントローラ17は、コントラストを検波した領域の内、被写界深度内に含まれる領域を選択する。例えば、図24の右の図では、(A)と(C)が被写界深度内に含まれる領域となる。そして、コントローラ17は、選択された領域の内、被写界深度内で最も中心に位置する領域を選択する。例えば、図24の右の図では、(C)が、被写界深度内で最も中心に位置する領域となる。
コントローラ17は、被写界深度内で最も中心に位置する領域を選択した場合、この選択した領域に対して、フォーカスレンズ駆動部116を制御する。これによって、フォーカスレンズ113が駆動される。
このようにすれば、被写界深度に基づいて、合焦状態を調整するようにしたので、合焦時に被写体が追尾領域から外れてしまったとしても、より精度の高い合焦を行なうことができる。
なお、合焦状態を調整する方法は、この実施の形態に限られず、どのような方法であってもかまわない。また、合焦状態を調整するために利用される領域は、例えば、図22のような場合、合焦領域のみを利用して、合焦状態を調整してもよい。また、本実施の形態では、合焦領域内のコントラストを、合焦状態を調整するための情報として利用したが、これに限られない。
2.動作
次に、このように構成されたデジタルカメラ1の動作について図16、17、25のフローチャートを用いて説明する。デジタルカメラ1は、図示しない電源スイッチがOFFからONに変更され、追尾撮影モードに設定されると、デジタルカメラ1は、以下の動作を行なう(図16)。
2.動作
次に、このように構成されたデジタルカメラ1の動作について図16、17、25のフローチャートを用いて説明する。デジタルカメラ1は、図示しない電源スイッチがOFFからONに変更され、追尾撮影モードに設定されると、デジタルカメラ1は、以下の動作を行なう(図16)。
まず、CCDイメージセンサー12が、被写体像を画像データとして撮像する(S1)。撮像された画像データは、ADコンバータ13や画像処理部14を介してコントローラ17に入力される。この際、ステップS2が行われるまで、CCDイメージセンサー12で繰り返し画像データが取得される。
コントローラ17は、タッチパネル20に、画像データを表示画面80として表示させる(図4)。そしてコントローラ17は、タッチパネル20を介した使用者からのタッチ操作を受け付ける。使用者からタッチ操作を受け付けた場合、コントローラ17は、タッチパネル20がタッチ操作された位置に応じて、画像データに追尾領域50を設定する(S2)。この際、コントローラ17は、追尾領域が設定された画像データをタッチパネル20に表示画面81として表示させる(図5)。そしてコントローラ17は、図19のように、追尾領域の位置に応じて、合焦領域を設定する(S3)。
次に、コントローラ17は、追尾領域50内の画像データを取得する。そしてコントローラ17は、追尾領域50内の画像データを解析した色情報を記憶媒体に記憶する(S4)。この際、コントローラ17は、追尾領域50が設定された被写体に対して、合焦状態の調整を行う(S5)。そして、コントローラ17は、追尾領域移動制御の処理を行なう(S6)。
次に、追尾領域移動制御の動作を図17のフローチャートを用いて説明する。
まず、CCDイメージセンサー12は、被写体像を画像データとして撮像する(T1)。撮像された画像データは、ADコンバータ13や画像処理部14を介してコントローラ17に入力される。また、コントローラ17は、検索領域60内の画像データを取得する(T2)。コントローラ17は、取得された検索領域60内の画像データにおいて、追尾領域50の色情報と最も近似する領域70を検索する(T3)。
次にコントローラ17は、ステップT3の検索結果に応じて、追尾領域を移動させるか否かを判別する(T4)。追尾領域を移動させると判断した場合、コントローラ17は、近似すると判別された最も近似する領域70内の画像データを解析し、この解析した色情報を記憶媒体に記憶する(T5)。一方、追尾領域を移動させないと判断した場合、ステップT1に移行する。
次に、コントローラ17は、追尾領域50が設定された被写体像の動き量を検出する(T6)。さらにコントローラ17は、ぶれ検出器30から、検出された振動量を取得する(T7)。なお、ぶれ検出器30は、コントローラ17からの制御信号に応じて、振動量をコントローラ17に出力するものであってもよいし、ぶれ検出器30が逐次振動量を出力するものであっても良い。
図17に戻って、コントローラ17は、振動量に応じて、動き量に制限フィルタをかける(T8)。その後コントローラ17は、追尾領域の位置情報、および、制限フィルタがかけられた動き量に基づいて、追尾領域を移動させる(T9)。この際、コントローラ17は、追尾領域50が移動された画像データを表示画面82として、タッチパネル20に表示させる(図15)。
次に、コントローラ17は、追尾領域50の位置に応じて、合焦領域90を設定する(T10)。そして、コントローラ17は、追尾領域50が設定された被写体に対して、合焦状態の調整を行う(T11)。その後再度ステップT1に移行し、CCDイメージセンサー12によって生成された新たな画像データを取得する。
これによって、デジタルカメラ1の被写体に対する追尾動作を可能にしている。
次に、撮影動作を図25のフローチャートを用いて説明する。図25のステップU1の動作は、図16、図17と並行して行なうようにしている。また、図25のステップU2〜U4の動作は、図16、図17の動作を停止して、行なうようにしている。
コントローラ17は、シャッタスイッチ211が使用者から全押しを受け付けたか否かを検知する(U1)。シャッタスイッチ211が使用者から全押しを受け付けた場合、ステップU2に処理を移行する。一方、シャッタスイッチ17が、使用者からの全押しを検知するまで、ステップU1の処理を繰り返す。
ステップU2に移行すると、図16又は図17で行なわれている動作を停止する。動作 の停止は、ステップT1の前で処理を停止する。すなわち、シャッタスイッチが全押しされた時点で、ステップT8の動作を行なっていた場合、ステップT9〜T11の動作を行って、処理を停止する。
図25に戻って、ステップU2では、コントローラ17が、CCDイメージセンサー12によって生成された新たな画像データを取得する(U2)。そしてコントローラ17は、追尾領域内の画像データおよび合焦領域内の画像データに基づいて、合焦状態を調整するように光学系11を制御する(U3)。その後、コントローラ17は、撮影制御の処理を行なう(U4)。これによって、撮影時における被写体への合焦精度をより高めることができる。
3.まとめ
上述のように本実施の形態では、被写体像を形成する光学系11と、光学系によって形成された被写体像を撮像して、画像データを生成するCCDイメージセンサー12と、CCDイメージセンサー12で生成される画像データ内で画像データの部分的特徴を示す特徴情報を検索し、特徴情報の検索結果に基づいて画像データ内の一部である追尾領域50を順次移動させるコントローラ17と、画像データ内における追尾領域50の位置に応じて、画像データ内に合焦領域90を設定するコントローラ17と、合焦指示を受け付けるシャッタスイッチ211と、シャッタスイッチ211が合焦指示を受け付けると、追尾領域50および合焦領域90内の画像データに基づいて、被写体像に合焦状態を調整するように光学系11を制御するコントローラ17と、を備える。
3.まとめ
上述のように本実施の形態では、被写体像を形成する光学系11と、光学系によって形成された被写体像を撮像して、画像データを生成するCCDイメージセンサー12と、CCDイメージセンサー12で生成される画像データ内で画像データの部分的特徴を示す特徴情報を検索し、特徴情報の検索結果に基づいて画像データ内の一部である追尾領域50を順次移動させるコントローラ17と、画像データ内における追尾領域50の位置に応じて、画像データ内に合焦領域90を設定するコントローラ17と、合焦指示を受け付けるシャッタスイッチ211と、シャッタスイッチ211が合焦指示を受け付けると、追尾領域50および合焦領域90内の画像データに基づいて、被写体像に合焦状態を調整するように光学系11を制御するコントローラ17と、を備える。
このようにすれば、受付手段が合焦指示を受け付けると、追尾領域の位置に応じた合焦領域に基づいて、合焦状態を調整できるので、被写体が追尾領域から外れた場合であっても、合焦領域によって、被写体に対して合焦状態を調整することができる。これによって、より精度の高い合焦を行なうことができる。
(他の実施の形態)
本発明の実施の形態として、実施の形態1を例示した。しかし、本発明は、実施の形態1に限定されず、他の実施の形態においても実現可能である。そこで、本発明の他の実施の形態を以下まとめて説明する。
(他の実施の形態)
本発明の実施の形態として、実施の形態1を例示した。しかし、本発明は、実施の形態1に限定されず、他の実施の形態においても実現可能である。そこで、本発明の他の実施の形態を以下まとめて説明する。
本発明の実施の形態1では、撮像手段としてCCDイメージセンサー120を例示した。しかし、CCDイメージセンサー120に替えて、他の撮像手段を用いてもよい。他の撮像素子としては、例えば、CMOSイメージセンサーなどを用いてもよい。CMOSイメージセンサーを用いることにより、消費電力を低減できる。すなわち、撮像手段は、被写体像を撮像して画像データを生成するものである。CCDイメージセンサーに替えて、CMOSイメージセンサーを用いると、撮像手段から出力される画像データにのるノイズを減らすことができる。
また、本発明の実施の形態1では、タイミングジェネレータ121がCCDイメージセンサー12に供給するパルス信号を、例えば、1秒間に30回のフレーム読み出しパルス信号を供給するように構成したが、これに限られない。例えば、1秒間に50回や60回のパルス信号を供給するようにしてもよい。要するに、タイミングジェネレータは、フレーム読み出しのためのパルス信号を供給できるものであればよい。
また、本発明の実施の形態1では、振動検出手段として、二つのジャイロセンサーによって構成される、2軸のぶれ検出器を例示したが、これに限られず、自装置の振動を検出できるものであればどのような構成であってもよい。例えば、振動検出手段は、1軸の振動を検出できるものであってもよい。また、ジャイロセンサーは、振動式、機械式、光学式など様々な構成で実現できる。また、振動の大きさについては、振動量で実現したが、これに限られず、どのような値で表現してもかまわない。
また、本発明の実施の形態1では、タッチパネルを備えた装置を例示したが、これに限られず、液晶モニタなどの表示手段と、十字キーや押下釦などの入力手段を備える装置で構成するようにしてもよい。
また、本発明の実施の形態1では、合焦手段として、山登り方式のオートフォーカスを用いるコントローラ17を例示したが、これに限られず、他のAF処理によって合焦状態を調整できるものであってもよい。例えば、他のAF処理として、一眼レフのカメラなどで、一般的に用いられる位相差検出方式が考えられる。
さらに、本発明の実施の形態1では、合焦手段として、コンティニュアスAFを行なうコントローラ17を例示したが、これに限られず、所定のタイミングで合焦状態を調整するものであってもよい。所定のタイミングとは、例えば、使用者が操作部に含まれるシャッタスイッチを全押することで、デジタルカメラに対して撮影の動作を指示した時などが考えられる。すなわち、合焦手段は、合焦状態を調整できるものであればどのような手段であってもよい。
加えて、本発明の実施の形態1では、使用者がタッチパネルを操作することによって、追尾領域を画像データに設定するようにしたが、これに限られない。例えば、十字キーなどの操作部をデジタルカメラに設け、この操作部を操作することによって、追尾領域を設定するようにしてもよい。
また、本発明の実施の形態1では、追尾領域移動手段は、追尾領域内の画像データの色情報に基づいて、追尾領域を移動させるように構成したが、これに限られない。例えば、色情報に替えて、追尾領域が設定された画像データと、新たに取得された画像データの差分を求めることによって、動体の移動を検知し、追尾動作を行なうようにしてもよい。差分処理を利用して、追尾を方法としては、例えば、特許文献(特許登録番号1132002号)の技術を利用可能である。これによって、被写体像の動き量を算出することができる。
また、本発明の実施の形態1では、色(色相)情報を利用して、追尾を行なっているが、これに限られず、輝度信号情報、さらに形状、温度又は被写体中の特徴あるコントラスト等その他の情報を利用して追尾処理を行なうことができる。要するに、これらの情報が特徴情報である。
また、本発明の実施の形態1では、取得された画像データの各フレームで、追尾動作を行なうようにしたが、これに限られない。
また、本発明の実施の形態1では、説明の関係上、追尾領域を移動させた後に、新たな画像データを取得するように記載しているが、これに限られず、追尾動作T1〜T9を並列に処理するようにしてもよい。この場合、コンピュータのパイプライン処理のように実現するとよい。このようにすれば、処理の高速化を図れる。
さらに、本発明の実施の形態1では、一つのコントローラで様々な手段を実現するようにしているが、これに限られず、二つ以上のコントローラで実現するようにしてもよい。
また、本発明の実施の形態1では、検索領域60を9倍の大きさで構成するようにしているが、これに限られない。検索領域はどの程度の大きさでもかまわない。なお、上記に示したように振動の大きさ、被写体までの距離、または、焦点距離に応じて、検索領域の大きさを変更するようにしてもよい。このようにすれば、被写体が画面データ内で上下左右に移動しやすい場合、検索領域を大きくすることができるので、より確実に被写体を追尾できる。また、被写体が画面内で上下左右に移動しにくい場合、検索領域を小さくできるので、より短時間で被写体を追尾できる。
また、本実施の形態では、色情報の近似判断の方法として、二つのヒストグラムのユークリッド距離を用いて判断を行なうようにしているが、これに限られない。例えば、二つのヒストグラムにおいて、色相ごとに画素数をANDして、残ったヒストグムラムの数(要するに、色相ごとに何画素一致しているか)で判断するようにしてもよい。この場合、残ったヒストグラムの数が多い方が、近似する領域となる。このようにすれば、ヒストグラムの対比処理が、主に色相ごとの画素数のAND処理によって完了できるので、簡単な処理でヒストグラムの対比が可能となる。
また、本実施の形態では、シャッタスイッチ211が、全押し操作を受け付けた場合に、オートフォーカス手段が合焦状態を調整するように光学系を制御したが、これに限らない。例えば、シャッタスイッチ211が、半押し操作を受け付けた場合であって、追尾動作が停止された場合に、オートフォーカス手段が、合焦状態を調整するように光学系を制御してもよい。また、シャッタスイッチ以外に対する操作でもかまわないことは言うまでもない。
さらに、本実施の形態では、CCDイメージセンサー12で順次撮像された画像データのすべてに対して追尾動作および合焦調整をする例を説明したが、これに限られない。例えば、デジタルカメラは、特定のフレームで追尾動作を行い。他の特定のフレームで合焦状態を調整するようにしてもよい。この場合、追尾動作を行なうフレームと、合焦調整を行なうフレームが同じであることが好ましい。
別の実施の形態として、図26や図27のフローチャートのような動作のデジタルカメラを用いることもできる。図26は、図17に替えて、動作するものである。具体的な動作は、図17のT10の動作をなくし、T11の動作を、一つ繰り上げて、V10としたものである。図17とほとんど同じ処理であるため、詳細は割愛する。図27について、具体的に説明する。図27のステップW1,W2は、図25のステップU1、U2と同様の処理である。そして、ステップW3は、コントローラが、CCDイメージセンサー12で生成された一つ前の画像データで、追尾領域を移動させたか否かを判別する。この追尾領域を移動させたか否かは、一つ前の画像データにおいて、図26のステップV4の動作で、追尾領域を移動させないと判断した場合である。
図27に戻って、コントローラは、追尾領域を移動させていた場合、追尾領域内の画像データに基づいて、合焦状態を調整する(W4)一方、コントローラは、追尾領域を移動させていなかった場合、追尾領域内の画像データおよび合焦領域内の画像データに基づいて、合焦状態を調整する(W5)。そして、コントローラは、撮影制御の処理を行なう(W6)。
このようにすれば、一つ前の画像データにおいて追尾領域を移動できていない場合のように、追尾領域内に被写体(追尾領域を設定した被写体の一部)が存在しない可能性が高い環境において、合焦領域を用いて合焦状態を調整できるので、より確実に追尾すべき被写体に合焦状態を調整できる。また、一つ前の画像データにおいて、追尾領域を移動できている場合のような環境おいて、追尾領域のみを用いて合焦状態を調整できるので、より少ない領域内の検波情報で、合焦状態を調整できるようになる。なお、図26、図27の実施例は、一つ前の画像データで追尾領域を移動させたか否かを判別するようにしているが、これに限られず、追尾領域が、追尾している被写体から外れているか否かを判別できるものであればどのような方法であってもよい。
すなわち、本発明は、上記実施の形態に限られず、種々の態様で実施可能である。
本発明は、追尾機能を備える撮像装置に適用可能である。具体的には、追尾機能を備えるデジタルカメラ、ムービー、カメラ付き携帯端末等に利用できる。
1 デジタルカメラ
11 光学系
112 ズームレンズ
113 フォーカスレンズ
12 CCDイメージセンサー
13 ADコンバータ
14 画像処理部
15 バッファメモリ
17 コントローラ
19 メモリカード
20 タッチパネル
30 ぶれ検出器
50 追尾領域
60 検索領域
70 最も近似する領域
80 表示画面
90 合焦領域
11 光学系
112 ズームレンズ
113 フォーカスレンズ
12 CCDイメージセンサー
13 ADコンバータ
14 画像処理部
15 バッファメモリ
17 コントローラ
19 メモリカード
20 タッチパネル
30 ぶれ検出器
50 追尾領域
60 検索領域
70 最も近似する領域
80 表示画面
90 合焦領域
Claims (5)
- 被写体像を形成する光学系と、
前記形成された被写体像を撮像して、画像データを順次生成する撮像手段と、
前記撮像手段で生成される画像データ内で画像データの部分的特徴を示す特徴情報を検索し、前記特徴情報の検索結果に基づいて前記画像データ内の一部である追尾領域を順次移動させる追尾領域移動手段と、
前記画像データ内における前記追尾領域の位置に応じて、前記画像データ内に合焦領域を設定する合焦領域設定手段と、
合焦指示を受け付ける受付手段と、
前記受付手段が前記合焦指示を受け付けると、前記合焦領域内の画像データに基づいて、前記被写体像に合焦状態を調整するように前記光学系を制御するオートフォーカス制御手段と、
を備える撮像装置。 - 前記オートフォーカス手段は、
前記受付手段が合焦指示を受け付けると、前記追尾領域内の画像データおよび/または前記合焦領域内の画像データに基づいて、前記被写体像に合焦状態を調整するように前記光学系を制御する、
請求項1に記載の撮像装置。 - 前記オートフォーカス制御手段は、
前記受付手段が合焦指示を受け付けるまでに前記追尾領域移動手段が前記追尾領域を移動させることができたかどうかに応じて、前記光学系を制御する際に用いる画像データとして、前記合焦領域内の画像データを用いるか否かを決定する、
請求項2に記載の撮像装置。 - 前記オートフォーカス制御手段は、
前記追尾領域移動手段が追尾領域を移動させると、前記追尾領域内の画像データに基づいて、前記被写体像の合焦状態を調整するように前記光学系を制御する一方、
前記受付手段が合焦指示を受け付けると、合焦領域内の画像データに基づいて、前記被写体像に合焦状態を調整するように前記光学系を制御する、
請求項1に記載の撮像装置。 - 前記オートフォーカス制御手段は、
前記受付手段が合焦指示を受け付けると、
前記合焦領域内の画像データのコントラスト情報、および、以前の画像データにおいて、前記追尾領域移動手段が追尾領域を移動させた際に合焦した被写体までの距離に基づく被写界深度に応じて、前記被写体像に対する合焦状態を調整するように前記光学系を制御する、
請求項4に記載の撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008091095A JP2009246700A (ja) | 2008-03-31 | 2008-03-31 | 撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008091095A JP2009246700A (ja) | 2008-03-31 | 2008-03-31 | 撮像装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009246700A true JP2009246700A (ja) | 2009-10-22 |
Family
ID=41308136
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008091095A Pending JP2009246700A (ja) | 2008-03-31 | 2008-03-31 | 撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009246700A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011102495A1 (en) * | 2010-02-16 | 2011-08-25 | Ricoh Company, Ltd. | Imaging device including target tracking function |
| JP2012231319A (ja) * | 2011-04-26 | 2012-11-22 | Canon Inc | 被写体追尾装置、被写体追尾方法及びプログラム |
| JP5914364B2 (ja) * | 2011-01-18 | 2016-05-11 | 富士フイルム株式会社 | オートフォーカスシステム |
-
2008
- 2008-03-31 JP JP2008091095A patent/JP2009246700A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011102495A1 (en) * | 2010-02-16 | 2011-08-25 | Ricoh Company, Ltd. | Imaging device including target tracking function |
| CN102763405A (zh) * | 2010-02-16 | 2012-10-31 | 株式会社理光 | 包括目标跟踪功能的成像设备 |
| US9092877B2 (en) | 2010-02-16 | 2015-07-28 | Ricoh Company, Ltd. | Imaging device including target tracking function |
| JP5914364B2 (ja) * | 2011-01-18 | 2016-05-11 | 富士フイルム株式会社 | オートフォーカスシステム |
| US9402019B2 (en) | 2011-01-18 | 2016-07-26 | Fujifilm Corporation | Autofocus system |
| JP2012231319A (ja) * | 2011-04-26 | 2012-11-22 | Canon Inc | 被写体追尾装置、被写体追尾方法及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5778998B2 (ja) | 撮像装置、画像生成方法およびコンピュータプログラム | |
| US8831282B2 (en) | Imaging device including a face detector | |
| KR101531167B1 (ko) | 디지털 촬영 장치의 움직임에 따른 촬영 제어 방법 및 장치 | |
| JP5623915B2 (ja) | 撮像装置 | |
| JP2009268086A (ja) | 撮像装置 | |
| US8648960B2 (en) | Digital photographing apparatus and control method thereof | |
| TW201109761A (en) | Imaging apparatus, focusing method, and computer-readable recording medium recording program | |
| JP4890370B2 (ja) | 撮像装置 | |
| JP2009199049A (ja) | 撮像装置、および撮像装置制御方法、並びにコンピュータ・プログラム | |
| JP2016143022A (ja) | 撮像装置及び撮像方法 | |
| KR101594297B1 (ko) | 오토 포커싱을 이용한 흔들린 영상 판단 방법 및 장치 | |
| WO2013094552A1 (ja) | 撮像装置、その制御方法およびプログラム | |
| JP5409483B2 (ja) | 撮像装置 | |
| JP2009246700A (ja) | 撮像装置 | |
| JP4983666B2 (ja) | 撮像装置 | |
| JP2009296029A (ja) | 撮像装置 | |
| JPWO2019146164A1 (ja) | 撮像装置、撮像方法、及びプログラム | |
| KR20100115574A (ko) | 디지털 카메라 및 그 제어방법 | |
| JP2008301161A (ja) | 画像処理装置、デジタルカメラ、及び画像処理方法 | |
| JP4933347B2 (ja) | 撮像装置及びその制御方法及びプログラム及び記憶媒体 | |
| JP2009246699A (ja) | 撮像装置 | |
| JP2007199668A (ja) | 撮像装置、撮像装置の制御方法および制御プログラム | |
| JP2014023054A (ja) | 画像処理装置、撮像装置、および画像処理プログラム | |
| JP2009225238A (ja) | 撮像装置 | |
| JP2009194469A (ja) | 撮像装置 |