JP2009042190A - ナビゲーション端末 - Google Patents
ナビゲーション端末 Download PDFInfo
- Publication number
- JP2009042190A JP2009042190A JP2007210473A JP2007210473A JP2009042190A JP 2009042190 A JP2009042190 A JP 2009042190A JP 2007210473 A JP2007210473 A JP 2007210473A JP 2007210473 A JP2007210473 A JP 2007210473A JP 2009042190 A JP2009042190 A JP 2009042190A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle speed
- vehicle
- signal
- magnetic detection
- tire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Abstract
【課題】車速の情報を簡易に利用することができるとともに、持ち運びにも適したナビゲーション端末を提供し、車速の情報を精度良く算出する。
【解決手段】着磁したタイヤの回転による磁気の変化の他に地磁気等の影響をも含んでいる磁気センサ12の出力である磁気検出信号から、タイヤの回転に応じた周波数帯域の信号をBPF201で抽出し、該抽出した信号に基づいて車速を算出する。
【選択図】図4
【解決手段】着磁したタイヤの回転による磁気の変化の他に地磁気等の影響をも含んでいる磁気センサ12の出力である磁気検出信号から、タイヤの回転に応じた周波数帯域の信号をBPF201で抽出し、該抽出した信号に基づいて車速を算出する。
【選択図】図4
Description
本発明は、車両の位置を計測し走行案内を行うナビゲーション端末に関し、特に携帯型のナビゲーション端末に関する。
近年、車両の位置を計測し走行案内を行うナビゲーション装置では、GPS信号に基づき取得される位置情報の他、ジャイロセンサより得られる方位や車速計より得られる車速の情報も併用することによって、車両の現在位置を高精度に求める機能を搭載したものが実用化されている。このような機能は、特に、GPS信号が取得できないか、又はGPS信号の精度が良くない場合に有用となる。
ところで、ナビゲーション装置には、車内に配線等を行って設置する据え置き型のものと、PND(Personal Navigation Device)と呼ばれる持ち運び自在の携帯型のものとがある。携帯型のナビゲーション装置(以下、ナビゲーション端末という)の場合には、車両の計器盤等の内部に設置された車速計から車速の情報を得るためには、ナビゲーション端末と車速計とを配線で接続する必要があり、配線工事等を行わなければならないので、ナビゲーション端末が携帯型であることのメリットが損なわれてしまうことになる。
なお、この問題に対しては、ナビゲーション端末に加速度センサを搭載して、得られた加速度を積分することにより車速や位置を求めるという方法が考えられるが、加速度センサは車両に加えられた加速度と車両の傾きとを区別できないので、車速や位置の計測に大きな誤差を生じてしまうという欠点を有している。
一方、車両に設置された車速計を用いることなく車速の情報を得る方法として、着磁させたタイヤが回転するときの磁気の変化を磁気センサで計測することによりタイヤの回転数を求め、これから車速を算出するという方法が提案されている(例えば、特許文献1参照)。
特許第3619350号公報
しかしながら、上記文献の方法では、タイヤからの磁気を感度良く検出するために磁気センサはタイヤの近くに配置しなければならず、この磁気センサから車内へ配線を引き回す必要がある点は、上述の車速計の場合と同じである。
以上のように、従来は、携帯型のナビゲーション端末では車速の情報を簡易に利用することができなかった。
以上のように、従来は、携帯型のナビゲーション端末では車速の情報を簡易に利用することができなかった。
本発明は上記の点に鑑みてなされたものであり、その目的は、車速の情報を簡易に利用することができるとともに、持ち運びにも適したナビゲーション端末を提供することにある。更にまた、上記ナビゲーション端末において、車速の情報を精度良く算出することを目的とする。
本発明は上記の課題を解決するためになされたものであり、車両の位置を表す位置情報を取得する位置情報取得手段と、前記車両の着磁されたタイヤが発する磁気を検出して磁気検出信号を出力する磁気検出手段と、前記磁気検出手段から出力される磁気検出信号に基づいて車両の車速を算出する車速算出手段と、前記位置情報取得手段により取得された位置情報と前記車速算出手段により算出された車速とを用いて車両の走行案内をする案内手段と、を備えることを特徴とするナビゲーション端末である。
この発明によれば、ナビゲーション端末に位置情報取得手段と磁気検出手段とを設けたので、当該磁気検出手段により着磁したタイヤからの磁気を検出することで車速の情報を簡易に取得しナビゲーションに利用でき、また、このナビゲーション端末の持ち運びも容易となる。
また、本発明は、上記ナビゲーション端末において、前記磁気検出手段から出力される磁気検出信号を入力し、該磁気検出信号から所定の周波数以上の周波数帯域の信号を取り出す第1のフィルタ手段を備え、前記車速算出手段は、前記第1のフィルタ手段の出力信号に基づいて車両の車速を算出することを特徴とする。
この発明において、着磁したタイヤの回転による磁気の変化の他に地磁気等の影響をも含んでいる磁気検出手段の出力である磁気検出信号から、タイヤの回転に応じた周波数帯域の信号がフィルタで取り出されるので、地磁気等の影響を受けることなく車両の車速を精度良く算出することができる。特に、ナビゲーション端末の内部に磁気検出手段を設けた構成では、タイヤから磁気検出手段までの距離が特許文献1のようにタイヤの近くに磁気検出手段を設ける場合と比較して遠いために磁気検出手段により検出されるタイヤからの磁気が弱い場合であっても、車速を精度良く算出可能である。
また、本発明は、上記ナビゲーション端末において、前記第1のフィルタ手段は、前記車速算出手段により算出された現在の車速に対応する周波数帯域の信号を取り出すことを特徴とする。
この発明において、車速算出手段から得られる現在の車速に応じた周波数の信号が取り出されるように、フィルタの周波数帯域が設定される。これにより、どのような車速であってもタイヤの回転による磁気変化を表す信号が取り出されるので、確実に車速算出手段によって車速を算出することができる。
また、本発明は、上記ナビゲーション端末において、前記第1のフィルタ手段は、前記位置情報取得手段により取得された車両の位置情報に基づき推定される現在の車速に対応する周波数帯域の信号を取り出すことを特徴とする。
この発明において、位置情報取得手段から得られる車両の位置情報に基づいて車両の車速を推定し、この推定した車速に応じた周波数の信号が取り出されるようにフィルタの周波数帯域が設定される。これにより、どのような車速であってもタイヤの回転による磁気変化を表す信号が取り出されるので、確実に車速算出手段によって車速を算出することができる。
また、本発明は、上記ナビゲーション端末において、前記磁気検出手段から出力される、地磁気に対応した成分を含んだ磁気検出信号を入力し、該磁気検出信号から所定の周波数以下の低域信号を取り出す第2のフィルタ手段と、前記第2のフィルタ手段の出力信号に基づいて車両の方位を算出する方位算出手段と、を備えることを特徴とする。
この発明において、フィルタで磁気検出信号から低域信号が取り出され、車両の方位が算出される。車両の方位が変わることによる地磁気の変化はタイヤの回転による磁気変化よりも通常はゆっくりとしているので、取り出した低域信号は車両の方位の変化に対応したものであり、低域信号に基づいて車両の方位を算出することが可能である。
また、本発明は、上記ナビゲーション端末において、少なくとも前記車速算出手段により算出された車速と前記方位算出手段により算出された方位とに基づいて車両の位置を算出することを特徴とする。
この発明によれば、位置情報取得手段により取得される位置情報の精度に問題がある場合でも、車両の位置を正しく求めることができる。
また、本発明は、上記ナビゲーション端末において、前記磁気検出手段は、互いに異なる3軸方向の磁気を検出することを特徴とする。
この発明によれば、車両内にナビゲーション端末を置く向きによらず、3軸のうちいずれか必ず1つは着磁されたタイヤが発する磁気の向きと近い向きを向くので、感度良くタイヤからの磁気を検出することができる。
本発明によれば、ナビゲーション端末において、車速の情報を簡易に取得しナビゲーションに利用できるとともに、持ち運びも容易である。また、フィルタを用いてタイヤの回転に応じた周波数帯域の信号を取り出すので、地磁気等の影響を受けることなく車両の車速を精度良く算出することができる。
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
図1は、本発明の一実施形態によるナビゲーション端末1の構成図である。ナビゲーション端末1は、サブCPU10と、GPS部11と、磁気センサ12と、ジャイロセンサ13と、加速度センサ14と、CPU20と、メモリ21と、外部メモリ22と、通信部23と、表示装置24と、音源25と、スピーカ26と、を含んで構成され、これら各部は一つの筐体内に収容されてナビゲーション端末1が携帯可能になっている。
図1は、本発明の一実施形態によるナビゲーション端末1の構成図である。ナビゲーション端末1は、サブCPU10と、GPS部11と、磁気センサ12と、ジャイロセンサ13と、加速度センサ14と、CPU20と、メモリ21と、外部メモリ22と、通信部23と、表示装置24と、音源25と、スピーカ26と、を含んで構成され、これら各部は一つの筐体内に収容されてナビゲーション端末1が携帯可能になっている。
CPU(中央処理装置)20は、メモリ21に格納されたプログラムを読み込み、該読み込んだプログラムに従って、ナビゲーション端末1の各部を統括し制御するとともに、磁気センサ12によって得られる信号から車速と方位を算出する後述(図4)の信号処理や、ナビゲーション(走行案内)機能を実現する情報処理を実行する。
サブCPU10は、GPS部11、磁気センサ12、ジャイロセンサ13、および加速度センサ14の各部における各種計測等の処理を統括、制御し、これら各部により得られたデータをCPU20へ適宜供給する。これらのデータに基づいて、CPU20においてナビゲーションのための情報処理が実行される。
サブCPU10は、GPS部11、磁気センサ12、ジャイロセンサ13、および加速度センサ14の各部における各種計測等の処理を統括、制御し、これら各部により得られたデータをCPU20へ適宜供給する。これらのデータに基づいて、CPU20においてナビゲーションのための情報処理が実行される。
GPS部11は、GPS(全地球測位システム)方式によって車両の位置を測位し、測位された位置を表す位置情報をサブCPU10へ出力する。GPS方式では、GPS衛星からのGPS信号を受信し、該GPS信号を受信した受信時刻のデータを用いた演算処理によって、位置を測位する。
磁気センサ12は、磁気の大きさを検出し、該検出された磁気の大きさを表す磁気検出信号をサブCPU10へ出力する。磁気センサ12によって検出される磁気には、車両の着磁されたタイヤ(図3参照)が発する磁気と、地磁気や周囲の建造物等に含有される磁性材料から発せられる磁気などの環境に起因する磁気と、が含まれている。タイヤからの磁気は、車両の走行中はタイヤの回転に応じて時間的に変動している。
磁気センサ12としては、特定の一方向の磁気成分のみを検出する1軸磁気センサ、異なる二方向(通常は互いに直角な二方向)の磁気成分を検出する2軸磁気センサ、または異なる三方向(通常は互いに直角な三方向)の磁気成分を検出する3軸磁気センサ、のいずれを用いることもできる。但し、ナビゲーション端末1は携帯可能とされており使用者がナビゲーション端末1を車内に置く場所や向きは不定である関係上、1軸磁気センサを用いると、その置き方によってはタイヤからの磁気の向きと1軸磁気センサの感度方向とがずれ、タイヤからの磁気に対する検出感度が低下するおそれがある。したがって、2軸磁気センサか、より好ましくは3軸磁気センサを用いることが望ましい。また2軸磁気センサまたは3軸磁気センサを用いた場合には、地磁気により方位の算出が可能となる。
ジャイロセンサ13は、車両の方位の変化を所定の基準方位からのずれとして検出することにより車両の方位を計測し、その結果をサブCPU10へ出力する。
加速度センサ14は、車両の加速度を計測しその結果をサブCPU10へ出力する。なお、この加速度センサ14によってナビゲーション端末1の傾きを求めることもでき、この傾きの情報を、磁気センサ12やジャイロセンサ13により得られる方位の精度を向上させるために使用することもできる。
加速度センサ14は、車両の加速度を計測しその結果をサブCPU10へ出力する。なお、この加速度センサ14によってナビゲーション端末1の傾きを求めることもでき、この傾きの情報を、磁気センサ12やジャイロセンサ13により得られる方位の精度を向上させるために使用することもできる。
メモリ21は、ROM(読出し専用メモリ)とRAM(随時書込み読出しメモリ)からなる。ROMには、CPU20で実行されるプログラムが記憶されている。RAMは、プログラム実行時に一時データを記憶する記憶領域として使用される。
外部メモリ22は、例えばハードディスクドライブなどの大容量記憶装置であり、ナビゲーションに必要な地図情報等を記憶している。
通信部23は、例えば無線通信等によってインターネットと接続し、最新の地図情報等をインターネットを介して取得する。
外部メモリ22は、例えばハードディスクドライブなどの大容量記憶装置であり、ナビゲーションに必要な地図情報等を記憶している。
通信部23は、例えば無線通信等によってインターネットと接続し、最新の地図情報等をインターネットを介して取得する。
表示装置24は、ナビゲーション機能による走行案内を、例えば地図上に車両の現在位置と方位が分かるような形でグラフィカルに表示する。
音源25は、必要なタイミングで例えば交差点を曲がる等の音声案内用の音声を発生してスピーカ26へ出力し、スピーカ26から音声案内を行う。
音源25は、必要なタイミングで例えば交差点を曲がる等の音声案内用の音声を発生してスピーカ26へ出力し、スピーカ26から音声案内を行う。
図2は、ナビゲーション端末1と車両の位置関係を説明する図である。ナビゲーション端末1は、車両2の車内、例えば運転席付近に置かれ、着磁した前輪のタイヤ3から発せられた磁気が、ナビゲーション端末1内の磁気センサ12を通過するような配置となっている。車両2が走行しタイヤ3が回転すると、タイヤ3の回転に合わせて磁気も変化し、磁気センサ12が検出する磁気が変化する。上記配置により、磁気センサ12は、この変動する磁気を検出することが可能である。
図3は、タイヤ3が着磁された様子を示す図である。タイヤ3は、その内部に鉄等の磁化し得る材質でできたワイヤ31が内蔵されており、タイヤ3表面を磁石で擦ることによって、ワイヤ31が磁化される。このとき、タイヤ3の半周分32は磁石のS極で擦り、残りの半周分33は磁石のN極で擦ることにより、タイヤ3の外周半分32がN極に着磁され、外周のもう半分33がS極に着磁される。このようにして、タイヤ3は全体として磁気的にはN極・S極を持つ一つの棒磁石となり、タイヤ3が1回転する毎に磁気センサ12で検出される磁気は周期的に1周期分変化することになる。
なお、着磁させるタイヤは、車両2の4つのタイヤのうち1つだけ(例えば運転席に一番近い右前輪のタイヤ)とする。これは、4つの各タイヤは右左折する際にそれぞれ回転数が異なるので、複数のタイヤを着磁させると、右左折後に各タイヤからの磁気の向きが右左折前の状態から変化してしまい、それらが合成されて磁気センサ12で検出される結果、タイヤの回転数を正しく求めることが難しくなるからである。
次に、ナビゲーション端末1が車両の車速および方位を算出する信号処理について説明する。図4は、ナビゲーション端末1の当該信号処理にかかる機能ブロックを示す図であり、車速と方位を算出する信号処理は、BPF201と、車速算出部202と、LPF203と、方位算出部204とによって実現される。なお、これら各部の機能は、前述したように、メモリ21に格納されたプログラムをCPU20が読み出して実行することにより実現される。
図4において、磁気センサ12からの磁気検出信号は、BPF201およびLPF203へ入力される。上述したとおり、この磁気検出信号には、着磁されたタイヤ3が発する磁気に対応した成分と、地磁気等の環境に起因する磁気に対応した成分とが含まれる。前者の成分は、タイヤ3の回転に応じ、車両の車速に比例する周波数で時間変動している。この周波数は、車速にもよるが、走行開始直後や停止直前のごく低速時を除けば、数Hz以上の値である(タイヤ3は1秒間に数回転以上の回転数で回転する)。後者の成分は、地磁気に対してどのくらいの速さで車両の方位が変わるか、即ち右左折またはカーブ等で車両の方位がどのくらい速く変わるかや、磁気を発する建造物等の近くをどれくらいの車速で通り過ぎるか、といったことに依存して時間変動する。通常、このような周波数は1Hzより小さい。
BPF(バンドパスフィルタ)201は、上記の磁気検出信号から、所定の周波数帯域(帯域の下限の周波数をfL、上限の周波数をfHとする)の信号を抽出して、該抽出した信号を車速算出部202へ出力する。信号を抽出する周波数帯域は、上記した前者の成分、即ちタイヤの回転に応じた時間変動の成分が抽出されるように、数Hz以上に設定する。つまり周波数fLを数Hz以上とする。これにより、車速算出部202への入力は、環境に起因する1Hzより小さい時間変動成分即ち地磁気等の成分が除去されて、タイヤの回転に応じて時間変動する成分のみを含んだ信号となる。
周波数fL(または、周波数fLおよびfH)の値は、簡易的に固定値に設定しておくこともできるし、車速算出部202で算出された車速の値に基づいて、実際のタイヤの回転数に合わせてリアルタイムで可変に決定した値をBPF201へフィードバックして設定することもできる。車両の車速が急激に変化しない前提においては、このようなフィードバックにより、BPF201は設定された周波数帯域に従って確実且つ有効にタイヤの回転に応じて時間変動する磁気に対応した成分を抽出することができる。
車速算出部202は、BPF201からの入力信号に基づいて車両の車速を算出し、該算出した車速の情報をナビゲーション機能部205へ出力するとともに、該算出した車速に基づいて決定した周波数帯域の設定値をBPF201へフィードバックする。図5に、BPF201から車速算出部202へ入力される信号の一例を示す。同図の横軸は時間、縦軸は磁界(磁気)の値である。この信号は、図から分かるように、1秒間に数回の周期で振動している。これはタイヤの回転に対応した時間変動であり、例えば、該信号のピークとピークの時間差を求めたり、あるいは、該信号の周波数分析(高速フーリエ変換など)を行ったりする等の手法を用いることにより、該信号の周波数を算出する。この算出した周波数からタイヤの回転数を求め、更にその回転数から車両の車速を求めることができる。なお、図5では磁気センサ12(3軸磁気センサ)の3軸分の信号(X,Y,Z)を示しているが、車速算出部202は、例えば、そのうち振幅の一番大きいいずれか1軸分の信号を用いてその周波数を算出し、車速を求めることができる。
LPF(ローパスフィルタ)203は、磁気センサ12から出力される上述の磁気検出信号から、所定の周波数以下の低域信号を抽出し、該抽出した低域信号を方位算出部204へ出力する。所定の周波数として、磁気検出信号に含まれる上述した後者の成分、即ち地磁気に起因する成分が抽出されるように、例えば1Hzより小さい値を設定する。これにより、方位算出部204への入力は、タイヤの回転に応じて数Hz以上で時間変動する成分が除去されて、車両の方位が変わったことによる地磁気の変化に対応した成分のみを含んだ信号となる。
方位算出部204は、LPF203からの入力信号に基づいて車両の方位を算出し、該算出した方位の情報をナビゲーション機能部205へ出力する。前述したように、車両の方位を算出するために、磁気センサ12は2軸または3軸磁気センサであるとする。方位算出部204は、その2軸または3軸の各信号に基づいて、方位を算出する。
ナビゲーション機能部205は、GPS部11により得られる位置情報、車速算出部202により得られる車速の情報、方位算出部204により得られる方位の情報、ジャイロセンサ13により得られる方位の情報、加速度センサ14により得られる加速度(または加速度を積分して求められる車速)の情報、を適宜用いることにより車両の現在位置を求め、該求めた現在位置を外部メモリ22から取得される地図情報と照らし合わせることで走行案内を行う。その結果は、表示装置24への表示またはスピーカ26からの音声出力によって、運転者等へ通知される。
車両の現在位置を求めるにあたっては、車速算出部202により得られる車速の情報および方位算出部204により得られる方位の情報のみを用いてもよい。具体的には、現在の車速と方位に基づいて所定の単位時間経過後の車両の位置を求めることができるので、その処理を繰り返すことによって現在位置を求めることが可能である。その際に、GPS部11からの位置情報を現在位置の補正のために利用してもよい。
次に、上述した車速算出部202の詳細な動作を説明する。図6は、車速算出部202の動作を示すフローチャートである。
まず、車速算出部202は、ステップS2以降の処理のための初期設定を行う(ステップS1)。この初期設定では、以下のステップS4で求まる単位時間当りのタイヤの回転数Rから車両の車速Vを計算するための変換係数Kを0(初回実行時のみ)、または前回使用した値に設定するとともに、BPF201で信号を抽出する周波数帯域を、下限周波数fL=5Hz,上限周波数fH=10kHzに設定する。
次に、車速算出部202は、磁気センサ12からの磁気検出信号をBPF201を介して1秒間取得し(ステップS2)、GPS部11により得られる位置情報および該位置情報に基づいてナビゲーション機能部205で算出される車速参照値Vref(GPS方式に基づく車速)をナビゲーション機能部205から取得(ステップS3)し、ステップS2で取得した信号から上述した周波数分析等の手法を用いてタイヤの回転数Rを算出する(ステップS4)。
続いて、車速算出部202は、タイヤの回転数Rが算出できたか否かを判断する(ステップS5)。タイヤの回転数Rが算出できない場合として、例えば、ステップS1で設定したBPF201の周波数帯域がタイヤの回転に合っていない場合や、ナビゲーション端末1の置き方(置く場所や向き)が適切でないためタイヤからの磁気を感度良く検出できない場合などがある。そのような場合にはタイヤの回転数Rが算出できず、車速算出部202は、タイヤの回転による磁気変化から求める車速が不定であるとし、車速の算出結果VをV=Vrefとするとともに、BPF201の周波数帯域を下限周波数fL=5Hz,上限周波数fH=10kHzに設定する(ステップS12)。
タイヤの回転数Rが算出できた場合、車速算出部202は、BPF201の周波数帯域をfL=R×0.7,fH=R×1.3に設定する(ステップS6)。このように周波数帯域を設定することで、次にステップS2以降を繰り返して実行する際に、車速が急激に変化しない限りBPF201により確実にタイヤの回転に応じた磁気の成分を抽出することができる。
車速算出部202は次に、車速参照値VrefがGPS方式に基づいて算出される車速として信頼できる下限の値VLより大きいか否かを判断し(ステップS7)、VrefがVLより大きい場合、車速参照値Vrefをタイヤの回転数Rで除した値Vref/Rが所定の範囲内KL<Vref/R<KHであるか否かを判断する(ステップS8)。但し、KLはタイヤの想定される円周の長さの下限値、KHはその上限値である。VrefとRが正しい値であれば、値Vref/Rはタイヤの円周の長さに一致するはずである。即ち、ここではステップS4で算出したタイヤの回転数Rが信頼できる値であるかどうかを判定している。
値Vref/Rが上記所定の範囲内にある場合、車速算出部202は、タイヤの回転数Rが信頼できる値であるとみなし、変換係数KをK=Vref/Rに設定する(ステップS9)。一方、ステップS7でVrefがVL以下であった場合、ステップS8とステップS9を飛ばして次のステップS10へ進む(変換係数KはステップS1での初期設定のままとなる)。車速算出部202は、次いで、変換係数Kが0であるか否かを判断する(ステップS10)。K≠0の場合(即ち初回実行時以外)、車速算出部202は、車速の算出結果VをV=K×Rとする(ステップS11)。
ステップS8で値Vref/Rが上記所定の範囲内にない場合(算出したタイヤの回転数Rが信頼できない値であるとみなされる)と、ステップS10で変換係数が0である場合(即ち初回実行時)は、車速算出部202は、上述したステップS12を実行する。
こうして、ステップS11またはステップS12のいずれかにより、車両の車速Vが求まる。車速算出部202は、得られた車速Vをナビゲーション機能部205へ出力する(ステップS13)。ナビゲーション機能部205は、前述したように、車速算出部202からの該車速Vの情報や、その他GPS部11、方位算出部204、ジャイロセンサ13、および加速度センサ14から得られる各種情報を総合的に用いることによって、車両の現在位置を求めて走行案内を行う。ステップS13の後、車速算出部202は、ナビゲーション機能を終了するか否かを判断し(ステップS14)、終了しない場合にはステップS2からの動作を繰り返す。
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、上述したステップS6でBPF201の周波数帯域を更新する際に、GPS部11により得られる車速参照値Vrefに応じた周波数帯域に更新するようにしてもよい。
また、上述したステップS1の初期設定において、変換係数Kの設定は初回のみ行うようにしてもよい。
また、タイヤ3の着磁方法は、図3に示すものに限定されず、例えば永久磁石をタイヤの回転とともに回転するようにタイヤに固定するという方法でもよい。
例えば、上述したステップS6でBPF201の周波数帯域を更新する際に、GPS部11により得られる車速参照値Vrefに応じた周波数帯域に更新するようにしてもよい。
また、上述したステップS1の初期設定において、変換係数Kの設定は初回のみ行うようにしてもよい。
また、タイヤ3の着磁方法は、図3に示すものに限定されず、例えば永久磁石をタイヤの回転とともに回転するようにタイヤに固定するという方法でもよい。
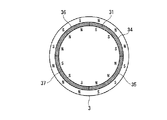
また、タイヤ3の円周に対する着磁のさせ方は、前述の図3に示すようにタイヤを半周ずつS極とN極に分けて着磁させる態様に限られることはなく、磁気センサ12が検出する磁気の周期的変化によってタイヤの回転数を算出できるのであれば、いかなる態様で着磁してもよい。例えば、図7に示すように、タイヤ3の4分の1周分34をN極に着磁させ、それと隣り合った4分の1周分35,36をS極に着磁させ、残りの4分の1周分37をN極に着磁させるというものでもよい。このようにすると、タイヤ3が1回転する毎に磁気センサ12で検出される磁気は2周期分変化することになるので、タイヤの回転による磁気の時間変動が速く(図3の場合の2倍)なって、特に車速が低速の時にBPF201による信号抽出が行いやすくなる。
1…ナビゲーション端末 2…車両 3…タイヤ 10…サブCPU 11…GPS部 12…磁気センサ 13…ジャイロセンサ 14…加速度センサ 20…CPU 21…メモリ 22…外部メモリ 23…通信部 24…表示装置 25…音源 26…スピーカ 31…ワイヤ 201…BPF 202…車速算出部 203…LPF 204…方位算出部 205…ナビゲーション機能部
Claims (7)
- 車両の位置を表す位置情報を取得する位置情報取得手段と、
前記車両の着磁されたタイヤが発する磁気を検出して磁気検出信号を出力する磁気検出手段と、
前記磁気検出手段から出力される磁気検出信号に基づいて車両の車速を算出する車速算出手段と、
前記位置情報取得手段により取得された位置情報と前記車速算出手段により算出された車速とを用いて車両の走行案内をする案内手段と、
を備えることを特徴とするナビゲーション端末。 - 前記磁気検出手段から出力される磁気検出信号を入力し、該磁気検出信号から所定の周波数以上の周波数帯域の信号を取り出す第1のフィルタ手段を備え、
前記車速算出手段は、前記第1のフィルタ手段の出力信号に基づいて車両の車速を算出する
ことを特徴とする請求項1に記載のナビゲーション端末。 - 前記第1のフィルタ手段は、前記車速算出手段により算出された現在の車速に対応する周波数帯域の信号を取り出すことを特徴とする請求項2に記載のナビゲーション端末。
- 前記第1のフィルタ手段は、前記位置情報取得手段により取得された車両の位置情報に基づき推定される現在の車速に対応する周波数帯域の信号を取り出すことを特徴とする請求項2に記載のナビゲーション端末。
- 前記磁気検出手段から出力される、地磁気に対応した成分を含んだ磁気検出信号を入力し、該磁気検出信号から所定の周波数以下の低域信号を取り出す第2のフィルタ手段と、
前記第2のフィルタ手段の出力信号に基づいて車両の方位を算出する方位算出手段と、
を備えることを特徴とする請求項1から請求項4のいずれか1の項に記載のナビゲーション端末。 - 少なくとも前記車速算出手段により算出された車速と前記方位算出手段により算出された方位とに基づいて車両の位置を算出することを特徴とする請求項5に記載のナビゲーション端末。
- 前記磁気検出手段は、互いに異なる3軸方向の磁気を検出することを特徴とする請求項1から請求項6のいずれか1の項に記載のナビゲーション端末。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007210473A JP2009042190A (ja) | 2007-08-10 | 2007-08-10 | ナビゲーション端末 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007210473A JP2009042190A (ja) | 2007-08-10 | 2007-08-10 | ナビゲーション端末 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009042190A true JP2009042190A (ja) | 2009-02-26 |
Family
ID=40443062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007210473A Pending JP2009042190A (ja) | 2007-08-10 | 2007-08-10 | ナビゲーション端末 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009042190A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5889995B1 (ja) * | 2014-11-10 | 2016-03-22 | 篠原 宏隆 | 情報処理端末、その制御方法およびアプリケーションプログラム |
| DE102014226612A1 (de) * | 2014-12-19 | 2016-06-23 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zur Ermittlung der Geschwindigkeit eines Schienenfahrzeuges |
| DE102017222924A1 (de) * | 2017-12-15 | 2019-06-19 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zum Bestimmen der Geschwindigkeit eines Fortbewegungsmittels mit zumindest einem Rad |
-
2007
- 2007-08-10 JP JP2007210473A patent/JP2009042190A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5889995B1 (ja) * | 2014-11-10 | 2016-03-22 | 篠原 宏隆 | 情報処理端末、その制御方法およびアプリケーションプログラム |
| DE102014226612A1 (de) * | 2014-12-19 | 2016-06-23 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zur Ermittlung der Geschwindigkeit eines Schienenfahrzeuges |
| DE102014226612B4 (de) * | 2014-12-19 | 2021-05-20 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zur Ermittlung der Geschwindigkeit eines Schienenfahrzeuges |
| DE102017222924A1 (de) * | 2017-12-15 | 2019-06-19 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zum Bestimmen der Geschwindigkeit eines Fortbewegungsmittels mit zumindest einem Rad |
| DE102017222924B4 (de) | 2017-12-15 | 2021-11-18 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zum Bestimmen der Geschwindigkeit eines Fortbewegungsmittels mit zumindest einem Rad |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11747505B1 (en) | Magnetic utility locator devices and methods | |
| JP4466705B2 (ja) | ナビゲーション装置 | |
| KR101361463B1 (ko) | 휴대용 장치의 전자 나침반 보정 기술 | |
| JPH04315913A (ja) | 車両方位測定装置 | |
| EP2098945B1 (en) | Motion-sensing program and electronic compass using the same | |
| JP2012506548A (ja) | 電子コンパスおよび電子コンパスの零点誤差を求める方法 | |
| JP4941199B2 (ja) | ナビゲーション装置 | |
| WO2006088057A1 (ja) | 方位計測装置 | |
| US8782913B2 (en) | Method of determining heading by turning an inertial device | |
| JP2008224642A (ja) | 磁気式ジャイロ | |
| JP2008089517A (ja) | 方位判別装置、方位判別方法及び方位判別プログラム | |
| US20190079199A1 (en) | Determining vehicle orientation for enhanced navigation experience | |
| JPH07111348B2 (ja) | 方位検出装置の出力補正装置 | |
| JP5678748B2 (ja) | 端末装置及び地磁気環境判定プログラム | |
| JP2009042190A (ja) | ナビゲーション端末 | |
| JP5560413B2 (ja) | 磁気式ジャイロ | |
| US7437242B2 (en) | Navigation apparatus | |
| El-Diasty | An accurate heading solution using MEMS-based gyroscope and magnetometer integrated system (preliminary results) | |
| JP2006275523A (ja) | 電子方位装置および記録媒体 | |
| JP5125534B2 (ja) | 方位検出装置および方位検出プログラム | |
| JPH07117415B2 (ja) | 車両用方位計 | |
| JP2006126178A (ja) | ナビゲーション装置 | |
| JP2003329705A (ja) | 運動解析方法、装置、及びプログラム | |
| JPH0543257B2 (ja) | ||
| JPH05297799A (ja) | 車両進行方位補正装置 |