JP2009027671A - Sh型バルク波共振子 - Google Patents
Sh型バルク波共振子 Download PDFInfo
- Publication number
- JP2009027671A JP2009027671A JP2007191681A JP2007191681A JP2009027671A JP 2009027671 A JP2009027671 A JP 2009027671A JP 2007191681 A JP2007191681 A JP 2007191681A JP 2007191681 A JP2007191681 A JP 2007191681A JP 2009027671 A JP2009027671 A JP 2009027671A
- Authority
- JP
- Japan
- Prior art keywords
- wave
- thickness
- substrate
- type bulk
- bulk wave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Abstract
【課題】電気機械結合係数K2が大きくスプリアスが少ないSH型バルク波共振子を提供する。
【解決手段】水晶基板11のカット面および弾性波伝搬方向をオイラー角表示で(0°,θ,ψ)とするとき、ψが約+90度または約−90度である水晶基板11に少なくとも一つのIDT電極12を配置してなるSH型バルク波共振子10において、IDT電極12がアルミニウムであって、オイラー角表示の角度θが95°<θ<151°であり、水晶基板11の厚みをt、弾性波の波長をλとしたとき、規格化基板厚みt/λがt/λ≦4である。
【選択図】図1
【解決手段】水晶基板11のカット面および弾性波伝搬方向をオイラー角表示で(0°,θ,ψ)とするとき、ψが約+90度または約−90度である水晶基板11に少なくとも一つのIDT電極12を配置してなるSH型バルク波共振子10において、IDT電極12がアルミニウムであって、オイラー角表示の角度θが95°<θ<151°であり、水晶基板11の厚みをt、弾性波の波長をλとしたとき、規格化基板厚みt/λがt/λ≦4である。
【選択図】図1
Description
本発明は、SH型バルク波を用いたSH型バルク波共振子に関する。
従来から、弾性波デバイスとして、レイリー波、漏洩弾性表面波、擬似縦波型漏洩弾性表面波などの弾性表面波を用いた弾性波デバイスが知られている。また、これらの弾性表面波とは異なり、基板内部を伝搬するバルク波としてラム波を用いた弾性波デバイスが知られている。そして、近年、電子機器の多様化に伴い弾性波デバイスの高周波化の取り組みがなされている。
弾性表面波として代表されるレイリー波は、十分に厚い基板の表面に沿って伝搬する波であり、表面から1波長内の表面付近にエネルギーの90%以上が集中している。
これに対してラム波は、伝搬させる波の数波長以下である薄い基板において、基板の上下面で反射を繰り返して伝搬する板波である。この板波であるラム波は、境界面と並行でない変位成分を持つ横波(SV波)と縦波(P波)が基板の両面でモード変換を起こし複雑に結合した波のことである。ラム波は位相速度が速く、電気機械結合係数K2がレイリー波などの表面波に比べて大きいという特徴がある。
弾性表面波として代表されるレイリー波は、十分に厚い基板の表面に沿って伝搬する波であり、表面から1波長内の表面付近にエネルギーの90%以上が集中している。
これに対してラム波は、伝搬させる波の数波長以下である薄い基板において、基板の上下面で反射を繰り返して伝搬する板波である。この板波であるラム波は、境界面と並行でない変位成分を持つ横波(SV波)と縦波(P波)が基板の両面でモード変換を起こし複雑に結合した波のことである。ラム波は位相速度が速く、電気機械結合係数K2がレイリー波などの表面波に比べて大きいという特徴がある。
このような弾性表面波およびラム波は、圧電基板に形成されたIDT電極(すだれ状電極)によって励振でき、弾性表面波を利用した弾性波デバイスとラム波を利用した弾性波デバイスとでは、その形態は似ているが波の伝搬状態が異なる。そして、弾性波デバイスの設計において、弾性表面波とラム波とでは、それぞれの波の解析手法が異なり、両者は異なる種類の波として区別される。
特許文献1にはATカット水晶基板を用い、基板の厚さが5波長以下のラム波型高周波共振器が開示されている。ラム波の伝搬可能なモードは、特許文献1の分散曲線にあるように基板厚み方向の波数が共振条件を満たすモードであり、基本波モードに高次モードも含め多数のモードが存在する。存在するモードの位相速度は、レイリー波の位相速度以上であり、縦波以上の位相速度をもったモードも多数存在している。このラム波の位相速度が速いモードを用いることで、表面波と比べて同じIDT電極の線幅でも高周波化が可能である。
また、特許文献1には弾性波の伝搬方向をX軸に直角な方向(90°X伝搬)とした弾性波における、電気機械結合係数K2の計算結果が示されている。
また、特許文献1には弾性波の伝搬方向をX軸に直角な方向(90°X伝搬)とした弾性波における、電気機械結合係数K2の計算結果が示されている。
特許文献2では弾性表面波を用いた高周波化の取り組みとして、表面波の伝搬方向をSTカット水晶の伝搬方向に対して直角な方向とすることで、位相速度が比較的速いSTW(Surface Transverse Wave)が得られることが開示されている。STWの位相速度はSTカット水晶の約1.6倍であるため高周波化が可能である。
さらに、このSTWを利用した表面波共振子の電極材料にタンタル(Ta)、タングステン(W)を用いることにより大きな電気機械結合係数が得られる。
さらに、このSTWを利用した表面波共振子の電極材料にタンタル(Ta)、タングステン(W)を用いることにより大きな電気機械結合係数が得られる。
しかしながら、特許文献1に記載のラム波を利用した弾性波デバイスでは伝搬可能なモードが多数存在してスプリアスが発生しやすく、異常発振などの問題がある。
また、特許文献1には弾性波の伝搬方向をX軸に直角な方向(90°X伝搬)とした弾性波の記載があるが、ATカット水晶基板に限定しているため、電気機械結合係数K2が大きくなるような最適設計はされていない。
さらに、特許文献2では電極材料としてアルミニウム(Al)に比べて密度の大きいタンタル(Ta)またはタングステン(W)を用いて、大きな電気機械結合係数K2を実現しているが、電極材料の密度が大きいことから表面波の位相速度が大きく減少してしまい、本来の位相速度をいかした高周波化が難しい。
また、弾性表面波とラム波とでは、その波の伝搬形態が異なるため、弾性表面波を利用する弾性波デバイスでの着想を、そのままラム波を利用する弾性波デバイスに応用することは困難である。上記説明にもあるように、ラム波は基板厚みによって波の特性が大きく変化してしまい、これは表面波には本来ない概念である。
また、特許文献1には弾性波の伝搬方向をX軸に直角な方向(90°X伝搬)とした弾性波の記載があるが、ATカット水晶基板に限定しているため、電気機械結合係数K2が大きくなるような最適設計はされていない。
さらに、特許文献2では電極材料としてアルミニウム(Al)に比べて密度の大きいタンタル(Ta)またはタングステン(W)を用いて、大きな電気機械結合係数K2を実現しているが、電極材料の密度が大きいことから表面波の位相速度が大きく減少してしまい、本来の位相速度をいかした高周波化が難しい。
また、弾性表面波とラム波とでは、その波の伝搬形態が異なるため、弾性表面波を利用する弾性波デバイスでの着想を、そのままラム波を利用する弾性波デバイスに応用することは困難である。上記説明にもあるように、ラム波は基板厚みによって波の特性が大きく変化してしまい、これは表面波には本来ない概念である。
本発明は上記課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
[適用例1]本適用例にかかるSH型バルク波共振子は、水晶基板のカット面および弾性波伝搬方向をオイラー角表示で(0°,θ,ψ)とするとき、前記角度ψが約+90度または約−90度である前記水晶基板に少なくとも一つのIDT電極を配置してなるSH型バルク波共振子であって、前記IDT電極がアルミニウムであって、オイラー角表示の前記角度θが95°<θ<151°であり、前記水晶基板の厚みをt、前記弾性波の波長をλとしたとき、規格化基板厚みt/λがt/λ≦4であることを特徴とする。
この構成によれば、オイラー角(0°,θ,ψ)で表される水晶基板上に、弾性波伝搬方向である角度ψが約+90度または約−90度であるIDT電極が配置され、規格化基板厚みt/λ≦4とすることでSH型バルク波を励振することができる。また、ψが約±90度であることで、ψが0度のときに励振される多数のラム波を無くすことができ、スプリアスの発現を抑圧することができる。
そして、角度θが95°<θ<51°の範囲であることで、表面波より電気機械結合係数K2が大きく、高周波化に対応する位相速度4000m/s以上のSH型バルク波を利用することができる。
このように、本発明によれば電気機械結合係数K2が大きく、スプリアスが少ない高周波化に適したSH型バルク波共振子を提供することができる。
なお、本願ではX軸方向にラム波を励振させる圧電基板において、その弾性波の伝搬方向を90°X伝搬とした波をSH型バルク波と呼ぶ。
そして、角度θが95°<θ<51°の範囲であることで、表面波より電気機械結合係数K2が大きく、高周波化に対応する位相速度4000m/s以上のSH型バルク波を利用することができる。
このように、本発明によれば電気機械結合係数K2が大きく、スプリアスが少ない高周波化に適したSH型バルク波共振子を提供することができる。
なお、本願ではX軸方向にラム波を励振させる圧電基板において、その弾性波の伝搬方向を90°X伝搬とした波をSH型バルク波と呼ぶ。
[適用例2]上記適用例にかかるSH型バルク波共振子において、前記IDT電極の膜厚をHとしたとき、規格化電極厚みをH/λがH/λ≦0.05であって、オイラー角表示の前記角度θが次式、θ=161.67×(H/λ)2+21.67×(H/λ)+126.00、を満足することが望ましい。
この構成によれば、オイラー角(0°,θ,90°)のθが、上記の式の範囲であることで、周波数温度特性TCFが0となる範囲を規定できる。このことから、周波数温度特性が良好で高精度のSH型バルク波共振子を提供することができる。
以下、本発明を具体化した実施形態について図面に従って説明する。
(実施形態)
(実施形態)
図1は本実施形態のSH型バルク波共振子の構成を示す構成図であり、図1(a)は模式斜視図、図1(b)は同図(a)のA−A断線に沿う模式断面図である。
SH型バルク波共振子10は、矩形状の水晶基板11にIDT電極12と反射器13が備えられている。水晶基板11は表裏に主面14,15を有し、一方の主面14にIDT電極12と反射器13が形成されている。IDT電極12は、アルミニウム(Al)で形成され、交差指電極12a,12bが交互に挿間されて、それぞれに逆相の電圧が印加されることでSH型バルク波を励振できるように構成されている。そして、IDT電極12を両側から挟むように反射器13が形成され、IDT電極12から伝搬されたSH型バルク波を反射器13で反射させてIDT電極12が形成された水晶基板11の中央部にエネルギーを閉じ込める役目を果たしている。なお、反射器13もIDT電極12と同様にアルミニウムで形成されている。
SH型バルク波共振子10は、矩形状の水晶基板11にIDT電極12と反射器13が備えられている。水晶基板11は表裏に主面14,15を有し、一方の主面14にIDT電極12と反射器13が形成されている。IDT電極12は、アルミニウム(Al)で形成され、交差指電極12a,12bが交互に挿間されて、それぞれに逆相の電圧が印加されることでSH型バルク波を励振できるように構成されている。そして、IDT電極12を両側から挟むように反射器13が形成され、IDT電極12から伝搬されたSH型バルク波を反射器13で反射させてIDT電極12が形成された水晶基板11の中央部にエネルギーを閉じ込める役目を果たしている。なお、反射器13もIDT電極12と同様にアルミニウムで形成されている。
IDT電極12における交差指電極12aと交差指電極12b間の距離は等間隔にピッチPにて形成され、励振されるSH型バルク波の波長λはλ=2Pの関係にある。また、IDT電極12は膜厚Hに形成されている。水晶基板11の厚みtはSH型バルク波の4波長(4λ)以下の厚みに設定されている。
ここでSH型バルク波とは、変位が弾性波伝搬方向と垂直かつ基板表面に平行な変位を主成分とし、薄い基板内を進行する波である。
ここでSH型バルク波とは、変位が弾性波伝搬方向と垂直かつ基板表面に平行な変位を主成分とし、薄い基板内を進行する波である。
次に、水晶基板11のカット面およびSH型バルク波の伝搬方向を特定するためのオイラー角(φ,θ,ψ)について説明する。
図2はオイラー角について説明する模式図である。図2のように、水晶の結晶軸をX軸(電気軸)、Y軸(機械軸)、Z軸(光軸)とするとき、Z軸を中心としてX軸をY軸側へ角度φだけ回転させて、これをX'軸とする。次にX'軸を中心としてZ軸を反時計回りに角度θだけ回転させ、これをZ'軸とする。このZ'軸を法線としてX'軸を含む面方位でカットし、基板とする。そして、この面方位にカットした基板において、Z'軸を中心としてX'軸を反時計回りに角度ψだけ回転させた軸をX''軸とし、このX''軸を弾性表面波伝搬方向とする。このとき、カット面および弾性表面波伝搬方向をオイラー角(φ,θ,ψ)と表示する。
図2はオイラー角について説明する模式図である。図2のように、水晶の結晶軸をX軸(電気軸)、Y軸(機械軸)、Z軸(光軸)とするとき、Z軸を中心としてX軸をY軸側へ角度φだけ回転させて、これをX'軸とする。次にX'軸を中心としてZ軸を反時計回りに角度θだけ回転させ、これをZ'軸とする。このZ'軸を法線としてX'軸を含む面方位でカットし、基板とする。そして、この面方位にカットした基板において、Z'軸を中心としてX'軸を反時計回りに角度ψだけ回転させた軸をX''軸とし、このX''軸を弾性表面波伝搬方向とする。このとき、カット面および弾性表面波伝搬方向をオイラー角(φ,θ,ψ)と表示する。
本実施形態では、オイラー角(φ,θ,ψ)における角度φが0°、角度ψが約90°としている。角度ψは90°に限定されるものではなく、90°±5°の範囲にあればSH型バルク波共振子を構成できることが発明者により確認されている。
また、角度ψについては+方向(反時計方向)に回転した場合と−方向(時計方向)に回転した場合とでは、その示す特性は同一であり、それぞれ等価な角度であると言える。
なお、オイラー角(0°,θ,0°)における水晶基板では主にラム波が励振され、オイラー角(0°,θ,90°)における水晶基板では主にSH型バルク波が励振される。
また、角度ψについては+方向(反時計方向)に回転した場合と−方向(時計方向)に回転した場合とでは、その示す特性は同一であり、それぞれ等価な角度であると言える。
なお、オイラー角(0°,θ,0°)における水晶基板では主にラム波が励振され、オイラー角(0°,θ,90°)における水晶基板では主にSH型バルク波が励振される。
続いてオイラー角(0°,θ,90°)における、共振子にて励振される弾性波のモード分布について説明する。
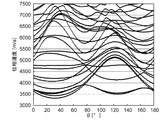
図3および図4はオイラー角(0°,θ,90°)のラム波、SH型バルク波のモード分布をシミュレーションしたグラフである。両図ともに、縦軸に弾性波の位相速度、横軸にオイラー角のθを採って表示している。
図3は電気機械結合係数K2≧0における弾性波の位相速度を示す。この場合、ラム波とSH型バルク波が混在している。
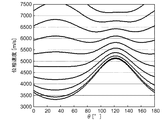
次に、図4に電気機械結合係数K2>0における弾性波のモード分布を示す。この場合、グラフに表示されているモードはSH型バルク波だけである。弾性波の伝搬方向をX軸に直角な方向とする90°X伝搬にすることにより、実際にはラム波はK2が0であるために励振されず、SH型バルク波のみが励振されることがわかる。
また、弾性波の伝搬方向を90°X伝搬にすることにより多数のラム波モードが減り、大幅にスプリアスを抑圧できる。ここで、位相速度が遅い順に0次モード(基本波)の位相速度、1次モードの位相速度、2次モードのそれと高次のモードのそれを示す。
図3および図4はオイラー角(0°,θ,90°)のラム波、SH型バルク波のモード分布をシミュレーションしたグラフである。両図ともに、縦軸に弾性波の位相速度、横軸にオイラー角のθを採って表示している。
図3は電気機械結合係数K2≧0における弾性波の位相速度を示す。この場合、ラム波とSH型バルク波が混在している。
次に、図4に電気機械結合係数K2>0における弾性波のモード分布を示す。この場合、グラフに表示されているモードはSH型バルク波だけである。弾性波の伝搬方向をX軸に直角な方向とする90°X伝搬にすることにより、実際にはラム波はK2が0であるために励振されず、SH型バルク波のみが励振されることがわかる。
また、弾性波の伝搬方向を90°X伝搬にすることにより多数のラム波モードが減り、大幅にスプリアスを抑圧できる。ここで、位相速度が遅い順に0次モード(基本波)の位相速度、1次モードの位相速度、2次モードのそれと高次のモードのそれを示す。
ここで、高周波帯のSH型バルク波共振子を考えた場合、位相速度が速いことが必要である。本願では、位相速度が4000m/s以上を高周波化に対応する位相速度とし、図4においては、IDT電極に用いられる電極の密度、厚みなどによって低下する速度を考慮して4500m/s以上の位相速度をもって高周波に対応する位相速度と規定した。図4から基本波の位相速度が4500m/s以上となるオイラー角θの範囲は、95°<θ<115°である。
図5はSH型バルク波の規格化基板厚みに対する位相速度変化の一例(θ=126°のとき)を示すグラフである。このグラフは縦軸に位相速度、横軸に格化基板厚みを採って表示している。なお、水晶基板の厚みをt、SH型バルク波の波長をλとしたとき、水晶基板の厚みをSH型バルク波の波長で除した値を規格化基板厚みt/λとする。
図5において、位相速度が遅い順に0次モード(基本波)の位相速度、1次モードの位相速度、2次モードのそれと高次のモードのそれを示す。図5から、水晶基板の厚みtを厚くするとSH型バルク波の高次モードが基本波に接近し密集状態となる。このことから、スプリアスとなる高次モードが基本波に隣接しないように規格化基板厚みt/λ≦4が望ましい。
また、基本波では水晶基板の厚みtを変化させても位相速度がほとんど変化しないため、水晶基板加工での厚みばらつきに対する周波数変化が非常に少なく、周波数の合わせこみが容易で、製造歩留まりが向上する。
図5において、位相速度が遅い順に0次モード(基本波)の位相速度、1次モードの位相速度、2次モードのそれと高次のモードのそれを示す。図5から、水晶基板の厚みtを厚くするとSH型バルク波の高次モードが基本波に接近し密集状態となる。このことから、スプリアスとなる高次モードが基本波に隣接しないように規格化基板厚みt/λ≦4が望ましい。
また、基本波では水晶基板の厚みtを変化させても位相速度がほとんど変化しないため、水晶基板加工での厚みばらつきに対する周波数変化が非常に少なく、周波数の合わせこみが容易で、製造歩留まりが向上する。
図6はSH型バルク波の基本波における、規格化基板厚みt/λによる電気機械結合係数K2の変化をそれぞれの規格化電極厚みH/λに対して示した一例(オイラー角のθ=126°のとき)のグラフである。なお、IDT電極の膜厚をHとしたとき、IDT電極の膜厚をSH型バルク波の波長で除した値を規格化電極厚みH/λとし、H/λ=0.0001、0.01、0.02、0.03、0.04、0.05、のそれぞれについて示している。なお、一般に知られたSTカット水晶レイリー波では、電気機械結合係数K2はおよそ0.1%である。
図6において、電気機械結合係数K2が0.1%より大きくなる範囲は、規格化電極厚みH/λ=0.01で規格化基板厚みt/λ≦0.62のときである。さらに、規格化電極厚みが0.02≦H/λ≦0.05で、規格化基板厚みt/λ≦4のときにおいても電気機械結合係数K2が0.1%より大きくなる。
また、H/λ≧0.04で、規格化基板厚みt/λ≦4のときにおいて電気機械結合係数K2がSTカット水晶レイリー波の約2倍の0.2%より大きくなる。
このように、IDT電極にアルミニウムを用いても十分に大きな電気機械結合係数K2を得ることができる。
図6において、電気機械結合係数K2が0.1%より大きくなる範囲は、規格化電極厚みH/λ=0.01で規格化基板厚みt/λ≦0.62のときである。さらに、規格化電極厚みが0.02≦H/λ≦0.05で、規格化基板厚みt/λ≦4のときにおいても電気機械結合係数K2が0.1%より大きくなる。
また、H/λ≧0.04で、規格化基板厚みt/λ≦4のときにおいて電気機械結合係数K2がSTカット水晶レイリー波の約2倍の0.2%より大きくなる。
このように、IDT電極にアルミニウムを用いても十分に大きな電気機械結合係数K2を得ることができる。
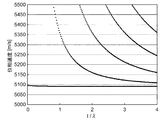
図7はSH型バルク波の基本波における、規格化基板厚みt/λによる位相速度の変化をそれぞれの規格化電極厚みH/λに対して示した一例のグラフである(オイラー角のθ=126°のとき)。
図7において、規格化基板厚みt/λがおよそ0.5より薄い範囲では、規格化電極厚みH/λが厚いほど位相速度に影響を与えて位相速度が低下している。つまり、水晶基板の厚さが0.5波長以下の薄いとき、IDT電極の厚みが位相速度を低下させていることが分かる。
これに対して、規格化基板厚みt/λがおよそ1より厚い範囲では、規格化電極厚みH/λは位相速度に影響を与えず一定の位相速度を得ることができる。つまり、水晶基板の厚さが1波長以上の厚みのとき、IDT電極の厚みは位相速度に影響を与えないことがわかる。
さらに、規格化基板厚みt/λ≧0.07であれば、規格化電極厚みH/λが0.05(0.5%)の電極厚みの厚いときであっても、高周波化に対応可能な位相速度4000m/sを下回ることがない。このように、本実施形態のSH型バルク波共振子では、電極材料の厚み(質量)により大きく位相速度を犠牲にすることがない。
図7において、規格化基板厚みt/λがおよそ0.5より薄い範囲では、規格化電極厚みH/λが厚いほど位相速度に影響を与えて位相速度が低下している。つまり、水晶基板の厚さが0.5波長以下の薄いとき、IDT電極の厚みが位相速度を低下させていることが分かる。
これに対して、規格化基板厚みt/λがおよそ1より厚い範囲では、規格化電極厚みH/λは位相速度に影響を与えず一定の位相速度を得ることができる。つまり、水晶基板の厚さが1波長以上の厚みのとき、IDT電極の厚みは位相速度に影響を与えないことがわかる。
さらに、規格化基板厚みt/λ≧0.07であれば、規格化電極厚みH/λが0.05(0.5%)の電極厚みの厚いときであっても、高周波化に対応可能な位相速度4000m/sを下回ることがない。このように、本実施形態のSH型バルク波共振子では、電極材料の厚み(質量)により大きく位相速度を犠牲にすることがない。
図8は規格化電極厚みH/λを変化させたとき、オイラー角に対する周波数温度特性TCFの変化の一例を示すグラフである(規格化基板厚みt/λ=0.4のとき)。周波数温度特性TCFは、共振周波数の温度変化による変動の割合を示している。
図8において、オイラー角(0°,θ,90°)におけるθと周波数温度特性TCFとの関係はほぼ直線にて表され、規格化電極厚みH/λを変化させると周波数温度特性TCFが0となるオイラー角のθが変化することがわかる。この変化は規格化電極厚みH/λが大きくなるに従い、オイラー角のθが大きくなる方向に変化している。
図8において、オイラー角(0°,θ,90°)におけるθと周波数温度特性TCFとの関係はほぼ直線にて表され、規格化電極厚みH/λを変化させると周波数温度特性TCFが0となるオイラー角のθが変化することがわかる。この変化は規格化電極厚みH/λが大きくなるに従い、オイラー角のθが大きくなる方向に変化している。
図9は周波数温度特性TCFが0となる規格化電極厚みH/λに対するオイラー角のθの変化をそれぞれの規格化基板厚みt/λに対して示したグラフである。このグラフでは、規格化基板厚みt/λが、t/λ=0.4,0.8,1.5,2.0,2.5のそれぞれについて表示している。
図9によれば、上記の各規格化基板厚みt/λにおいて、ほぼ同じ曲線を描き、曲線が重なっている。このように、周波数温度特性TCFが0となるのは規格化基板厚みt/λによらず、同条件であることがわかる。
ここで、規格化電極厚みH/λにて周波数温度特性TCFが0となるオイラー角(θ)を近似した近似式は以下の式(1)のように表せる。
θ=161.67×(H/λ)2+21.67×(H/λ)+126.00・・・(1)
ただし、規格化電極厚みH/λ≦0.05、IDT電極の材料としてアルミニウムを用いている。また、式(1)において導かれたθの値に対して、近似における誤差などを考慮して周波数温度特性TCFが0となるオイラー角のθは、θ±0.5°を範囲内に含むとする。
図9によれば、上記の各規格化基板厚みt/λにおいて、ほぼ同じ曲線を描き、曲線が重なっている。このように、周波数温度特性TCFが0となるのは規格化基板厚みt/λによらず、同条件であることがわかる。
ここで、規格化電極厚みH/λにて周波数温度特性TCFが0となるオイラー角(θ)を近似した近似式は以下の式(1)のように表せる。
θ=161.67×(H/λ)2+21.67×(H/λ)+126.00・・・(1)
ただし、規格化電極厚みH/λ≦0.05、IDT電極の材料としてアルミニウムを用いている。また、式(1)において導かれたθの値に対して、近似における誤差などを考慮して周波数温度特性TCFが0となるオイラー角のθは、θ±0.5°を範囲内に含むとする。
以上、本実施形態のSH型バルク波共振子10において、オイラー角(0°,θ,ψ)で表される水晶基板11上に、弾性波伝搬方向である角度ψが約+90度または約−90度であるIDT電極12が配置され、規格化基板厚みt/λ≦4とすることでSH型バルク波を励振することができる。また、ψを約±90度とすることで、ψが0度のときに励振される多数のラム波を無くすことができ、スプリアスの発現を抑圧することができる。
そして、オイラー角のθが95°<θ<151°の範囲であることで、表面波より電気機械結合係数K2が大きく、高周波化に対応する4000m/s以上の位相速度のSH型バルク波を利用することができる。
このように、本施形態のSH型バルク波共振子によれば電気機械結合係数K2が大きく、スプリアスが少ない高周波化に適したSH型バルク波共振子10を提供することができる。
そして、オイラー角のθが95°<θ<151°の範囲であることで、表面波より電気機械結合係数K2が大きく、高周波化に対応する4000m/s以上の位相速度のSH型バルク波を利用することができる。
このように、本施形態のSH型バルク波共振子によれば電気機械結合係数K2が大きく、スプリアスが少ない高周波化に適したSH型バルク波共振子10を提供することができる。
また、オイラー角(0°,θ,90°)のθが、式(1)の範囲であることで、周波数温度特性TCFが0となる範囲を規定できる。このことから、周波数温度特性が良好で高精度のSH型バルク波共振子10を提供することができる。
10…SH型バルク波共振子、11…水晶基板、12…IDT電極、12a,12b…交差指電極、13…反射器、H…IDT電極の膜厚、P…ピッチ、t…水晶基板の厚み、λ…SH型バルク波の波長。
Claims (2)
- 水晶基板のカット面および弾性波伝搬方向をオイラー角表示で(0°,θ,ψ)とするとき、前記角度ψが約+90度または約−90度である前記水晶基板に少なくとも一つのIDT電極を配置してなるSH型バルク波共振子であって、
前記IDT電極がアルミニウムであって、
オイラー角表示の前記角度θが95°<θ<151°であり、
前記水晶基板の厚みをt、前記弾性波の波長をλとしたとき、規格化基板厚みt/λがt/λ≦4であることを特徴とするSH型バルク波共振子。 - 請求項1に記載のSH型バルク波共振子において、
前記IDT電極の膜厚をHとしたとき、規格化電極厚みH/λがH/λ≦0.05であって、
オイラー角表示の前記角度θが次式、
θ=161.67×(H/λ)2+21.67×(H/λ)+126.00、
を満足することを特徴とするSH型バルク波共振子。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007191681A JP2009027671A (ja) | 2007-07-24 | 2007-07-24 | Sh型バルク波共振子 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007191681A JP2009027671A (ja) | 2007-07-24 | 2007-07-24 | Sh型バルク波共振子 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009027671A true JP2009027671A (ja) | 2009-02-05 |
| JP2009027671A5 JP2009027671A5 (ja) | 2010-08-19 |
Family
ID=40399010
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007191681A Withdrawn JP2009027671A (ja) | 2007-07-24 | 2007-07-24 | Sh型バルク波共振子 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009027671A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110114974A (zh) * | 2016-11-25 | 2019-08-09 | 国立大学法人东北大学 | 弹性波器件 |
| CN110571258A (zh) * | 2019-09-18 | 2019-12-13 | 京东方科技集团股份有限公司 | 显示装置、显示面板、阵列基板及其制造方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004215227A (ja) * | 2002-12-18 | 2004-07-29 | Seiko Epson Corp | 弾性表面波装置、その製造方法、および電子機器 |
| JP2006014165A (ja) * | 2004-06-29 | 2006-01-12 | Seiko Epson Corp | 共振子型sawフィルタ |
| JP2006217566A (ja) * | 2005-01-07 | 2006-08-17 | Seiko Epson Corp | ラム波型高周波共振子 |
-
2007
- 2007-07-24 JP JP2007191681A patent/JP2009027671A/ja not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004215227A (ja) * | 2002-12-18 | 2004-07-29 | Seiko Epson Corp | 弾性表面波装置、その製造方法、および電子機器 |
| JP2006014165A (ja) * | 2004-06-29 | 2006-01-12 | Seiko Epson Corp | 共振子型sawフィルタ |
| JP2006217566A (ja) * | 2005-01-07 | 2006-08-17 | Seiko Epson Corp | ラム波型高周波共振子 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110114974A (zh) * | 2016-11-25 | 2019-08-09 | 国立大学法人东北大学 | 弹性波器件 |
| CN110114974B (zh) * | 2016-11-25 | 2024-01-12 | 国立大学法人东北大学 | 弹性波器件 |
| CN110571258A (zh) * | 2019-09-18 | 2019-12-13 | 京东方科技集团股份有限公司 | 显示装置、显示面板、阵列基板及其制造方法 |
| CN110571258B (zh) * | 2019-09-18 | 2022-01-11 | 京东方科技集团股份有限公司 | 显示装置、显示面板、阵列基板及其制造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1902817B (zh) | 边界声波装置 | |
| JP2006217566A (ja) | ラム波型高周波共振子 | |
| US20090231061A1 (en) | Lamb-wave resonator and oscillator | |
| JP5648908B2 (ja) | 振動デバイス、並びに発振器、および電子機器 | |
| JP4645957B2 (ja) | 弾性表面波素子片および弾性表面波装置 | |
| JP2002100959A (ja) | 弾性表面波デバイス | |
| JP2006295311A (ja) | 弾性表面波素子片および弾性表面波装置 | |
| JP2010220164A (ja) | ラム波型共振子及び発振器 | |
| JP2008054163A (ja) | ラム波型高周波共振子 | |
| JP2000188521A (ja) | 弾性表面波装置及び2ポ―ト弾性表面波共振子 | |
| JP4432968B2 (ja) | 共振子型sawフィルタ | |
| JP5563378B2 (ja) | 弾性波素子 | |
| JPWO2008114715A1 (ja) | ラム波型弾性波素子 | |
| JP2010177819A (ja) | 弾性表面波素子 | |
| JPWO2007004661A1 (ja) | 弾性表面波デバイス | |
| JP4465464B2 (ja) | ラム波型弾性波素子 | |
| JP2009027671A (ja) | Sh型バルク波共振子 | |
| JP3255502B2 (ja) | 高安定弾性表面波素子 | |
| JP4582150B2 (ja) | 弾性表面波デバイスとこれを用いたモジュール装置又は発振回路 | |
| JP4145678B2 (ja) | 縦2重モード型sawフィルタ | |
| JP2005204042A (ja) | 弾性表面波共振子および弾性表面波フィルタ | |
| JP2008288652A (ja) | Sh型バルク波共振子 | |
| JP2011171887A (ja) | ラム波型共振子および発振器 | |
| JP2011171888A (ja) | ラム波型共振子および発振器 | |
| WO2022168799A1 (ja) | 弾性波装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100707 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100707 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111129 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20120112 |