JP2008286929A - Shake correction device and imaging apparatus - Google Patents
Shake correction device and imaging apparatus Download PDFInfo
- Publication number
- JP2008286929A JP2008286929A JP2007130568A JP2007130568A JP2008286929A JP 2008286929 A JP2008286929 A JP 2008286929A JP 2007130568 A JP2007130568 A JP 2007130568A JP 2007130568 A JP2007130568 A JP 2007130568A JP 2008286929 A JP2008286929 A JP 2008286929A
- Authority
- JP
- Japan
- Prior art keywords
- damper
- shake
- shake correction
- correction unit
- base plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

























Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Abstract
Description
本発明は、手振れ等による画像振れを補正する振れ補正装置および該振れ補正装置を有する撮像装置に関するものである。 The present invention relates to a shake correction apparatus that corrects image shake due to camera shake and the like, and an imaging apparatus having the shake correction apparatus.
現在のカメラは露出決定やピント合わせ等の撮影にとって重要な作業は全て自動化され、カメラ操作に未熟な人でも撮影失敗を起こす可能性は非常に少なくなっている。また、最近では、カメラに加わる手振れ等の振れによる画像振れを補正する振れ補正ユニットも多くの製品に搭載されてきており、撮影者の撮影ミスを誘発する要因は殆ど無くなってきている。 With the current camera, all the important tasks for shooting such as determining exposure and focusing are automated, and it is very unlikely that people who are unskilled in camera operation will fail to shoot. In recent years, a shake correction unit that corrects an image shake due to a shake such as a camera shake applied to a camera has been installed in many products, and there is almost no cause of a photographer's shooting mistake.
ここで、振れ補正ユニットについて簡単に説明する。撮影時のカメラの振れの代表例である手振れは周波数として通常1Hzないし10Hzの振動である。撮影時点において上記のような手振れを起こしていても画像振れの無い写真を撮影可能とする為には手振れによるカメラの振動を検出し、その検出値に応じて振れを相殺する方向に補正光学系を変位させる。その為、第1に、手振れを正確に検出し、第2に、手振れによる光軸変化を補正することが必要となる。 Here, the shake correction unit will be briefly described. Camera shake, which is a typical example of camera shake at the time of shooting, is normally 1 Hz to 10 Hz as a frequency. In order to be able to take pictures without image shake even when the above-mentioned camera shake occurs at the time of shooting, the correction optical system detects the camera shake due to camera shake and cancels the shake according to the detected value. Is displaced. For this reason, firstly, it is necessary to accurately detect camera shake, and secondly, it is necessary to correct an optical axis change due to camera shake.
手振れ等の振れの検出は、原理的にいえば、加速度、角加速度、角速度、角変位等を検出し、振れ補正の為にその出力を適宜演算処理する手段をカメラに搭載することによって行う。そして、この検出情報に基づき、撮影光軸を偏心させる補正光学系を駆動(光軸と直交する平面で移動)させて画像振れ抑制が行われる。 In principle, shake detection such as camera shake is performed by detecting acceleration, angular acceleration, angular velocity, angular displacement, and the like and mounting a means for appropriately calculating the output for camera shake correction. Then, based on this detection information, the correction optical system that decenters the photographing optical axis is driven (moved in a plane orthogonal to the optical axis) to suppress image blur.
振れ補正ユニットとしては、特許文献1に開示されたように、ジャイロ信号を基に手振れの検出を行い、光学系の一部(補正光学系)を移動させることによって画像振れの補正を行う構成のものが多く用いられている。
As disclosed in
振れ補正ユニットを構成する機構の望ましい特性としては、
1)摩擦が小さく、目標への追従が良いこと
2)周波数特性を設計者が操作しやすいこと
などが挙げられる。これらを実現するために様々な機構が提案されている。
As a desirable characteristic of the mechanism constituting the shake correction unit,
1) Friction is small and tracking of the target is good. 2) The frequency characteristic is easy for the designer to operate. Various mechanisms have been proposed to achieve these.
特許文献2に開示された機構の特徴は、補正手段と可動部の変位を規制する弾性手段および粘性手段を設けたことにある。このような機構にすることで、いわゆるオープン制御可能で、周波数特性を改善した機構となる。
The feature of the mechanism disclosed in
特許文献3に開示された機構の特徴は、可動鏡筒と固定鏡筒の間に複数の球を挟持し、弾性体で押圧していることである。このような構成とすることで、可動鏡筒を転がり摩擦によって駆動でき、摩擦力を軽減できる。また、可動鏡筒の重量と弾性体の弾性係数の比によって共振周波数が決まるので、目標とする共振周波数を容易に得ることができる。結果として、良好な制御性を得ることができ、小さな振動に対しても適切に応答できる機構となる。
特許文献2によると、機械的または電気的な方法で粘性抵抗を得ることができる。しかしながら、機械的方法によると、粘性手段を設ける場所がL字のガイドバー部分であったために組立性に難があるとともに、構造が複雑になるなどの問題がある。また、電気的方法によると、制御対象のばらつきの影響を受け易い、制御系が複雑になるなどの問題がある。
According to
特許文献3によると、非常に小さい摩擦で駆動でき、小さな手振れに対して追従可能である。しかしながら、適度な粘性抵抗が無いために主共振および副共振の影響が大きい、外乱の影響を受け易いという問題がある。
According to
(発明の目的)
本発明の目的は、画像振れ補正に適した粘性抵抗を得ることができると共に、ダンパー手段をユニット化することで、量産安定性と組立安定性を向上させ、コストダウンを図ることのできる振れ補正装置及び撮像装置を提供しようとするものである。
(Object of invention)
The object of the present invention is to obtain a viscous resistance suitable for image shake correction, and to improve the mass production stability and assembly stability by unitizing the damper means, thereby reducing the cost. An apparatus and an imaging apparatus are to be provided.
上記目的を達成するために、本発明は、像振れを補正する補正手段と、前記補正手段を一体に支持する可動部材と、前記可動部材を移動可能に保持する固定部材とを有し、前記可動部材を介して前記補正手段を撮像光学系の光軸と直交する平面内で移動させ、振れによる画像振れを補正する振れ補正装置において、前記固定部材に取り付けられる第1の取付部と、前記可動部材に取り付けられる第2の取付部と、前記第1の取付部と前記第2の取付部との間を粘弾性支持する減衰手段とがユニット化されて成り、前記補正手段の移動方向の制動を行うダンパー手段を有する振れ補正装置とするものである。 In order to achieve the above object, the present invention includes a correction unit that corrects image blur, a movable member that integrally supports the correction unit, and a fixed member that holds the movable member movably. In a shake correction apparatus that corrects image shake due to shake by moving the correction means in a plane orthogonal to the optical axis of the imaging optical system via a movable member, the first attachment portion attached to the fixed member; A second attachment portion attached to the movable member and a damping means for supporting viscoelasticity between the first attachment portion and the second attachment portion are formed as a unit, and the correction means moves in the moving direction. This is a shake correction device having a damper means for braking.
同じく上記目的を達成するために、本発明は、本発明の上記振れ補正装置を有する撮像装置とするものである。 Similarly, in order to achieve the above object, the present invention provides an imaging apparatus having the shake correction apparatus of the present invention.
本発明によれば、画像振れ補正に適した粘性抵抗を得ることができると共に、ダンパー手段をユニット化することで、量産安定性と組立安定性を向上させ、コストダウンを図ることができる振れ補正装置または撮像装置を提供できるものである。 According to the present invention, it is possible to obtain a viscous resistance suitable for image shake correction, and to improve the mass production stability and the assembly stability by unitizing the damper means so that the shake reduction can be achieved. A device or an imaging device can be provided.
本発明を実施するための最良の形態は、以下の実施例1ないし3に示す通りである。 The best mode for carrying out the present invention is as shown in Examples 1 to 3 below.
図1ないし図16を用いて、本発明の実施例1に係わる振れ補正機能を有する撮像装置について説明する。 An imaging apparatus having a shake correction function according to the first embodiment of the present invention will be described with reference to FIGS.
図1は、後述の振れ補正装置である振れ補正ユニットを備えた撮像装置の光学配置図である。図1において、1は撮像装置、2は撮像レンズ、3はレンズ駆動制御部、4は撮像光学系である撮像レンズ2の光軸、5はレンズ鏡筒である。6は撮像素子、7はメモリ、8は手振れ等の振れを検出する振れセンサ、9は後述の補正光学系を具備する振れ補正ユニットである。10は電源、11はレリーズ釦、12は撮像レンズ2に含まれる補正手段であるところの補正光学系、13はいわゆるクイックリターンミラー、14はファインダ光学系である。
FIG. 1 is an optical layout diagram of an imaging apparatus provided with a shake correction unit which is a shake correction apparatus described later. In FIG. 1, 1 is an imaging device, 2 is an imaging lens, 3 is a lens drive control unit, 4 is an optical axis of an
撮像装置1は、撮像レンズ2と不図示のピント調整部を用いて、被写体像を撮像素子6近傍に結像させる。さらにユーザーによるレリーズ釦11の操作と同期させて撮像素子6より被写体の情報を得て、メモリ7へ記録を行う。
The
次に、手振れ等の振れによる画像振れ補正について説明する。露光中などに例えば手振れが作用したときは、振れセンサ8の信号に基づいてレンズ駆動制御部3を介して、手振れを抑制する方向に振れ補正ユニット9を駆動する。詳しくは、振れ補正ユニット9に具備される補正光学系12を光軸4と直交する平面内で移動させる。これにより、撮像素子6上での画像の振れが軽減されて、手振れによる画像の劣化を防止できる。
Next, image shake correction due to shake such as camera shake will be described. For example, when camera shake is applied during exposure or the like, the camera
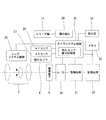
図2は、撮像装置1の電気的構成を示すブロック図である。撮像装置1は、撮像系、画像処理系、記録再生系、制御系を有する。撮像系は、撮像レンズ2、撮像素子6を含み、画像処理系は、A/D変換器20、画像処理部21を含む。また、記録再生系は、記録処理部23、メモリ24を含み、制御系は、カメラシステム制御部25、AFセンサ26、AEセンサ27、振れセンサ8、操作検出部29、およびレンズシステム制御部30を含む。
FIG. 2 is a block diagram illustrating an electrical configuration of the
撮像系は、物体からの光を撮像レンズ2を介して撮像素子6の撮像面に結像する光学処理系であり、AEセンサ27の信号をもとに図示しない絞りなどを用いて適切な光量の被写体光を撮像素子6に露光する。画像処理系に含まれる画像処理部21は、A/D変換器20を介して撮像素子6からの画像信号を処理するものであり、ホワイトバランス回路、ガンマ補正回路、補間演算による高解像度化を行う補間演算回路等を有する。記録再生系に含まれる記録処理部23は、メモリ24への画像信号の出力を行うとともに、表示部22に出力する像を生成、保存する。また、記録処理部23は、予め定められた方法を用いて画像や動画の圧縮を行う。
The imaging system is an optical processing system that forms an image of light from an object on the imaging surface of the
制御系は、レリーズ釦11等の操作を検出する操作検出部29からの検出信号に応動して撮像系、画像処理系、記録再生系をそれぞれ制御する。この制御系に含まれるカメラシステム制御部25は撮影の際のタイミング信号などを生成して出力する。AFセンサ26は撮像装置1のピント状態を検出する。AEセンサ27は被写体の輝度を検出する。振れセンサ8は手振れ等の振れを検出する。レンズシステム制御部30は上記カメラシステム制御部25の信号に応じて適切にレンズなどを制御する。
The control system controls the imaging system, the image processing system, and the recording / reproducing system in response to a detection signal from the operation detection unit 29 that detects the operation of the
制御系は、上記のように外部操作に応動して撮像系、画像処理系、記録再生系をそれぞれ制御する。例えば、レリーズ釦11の押下を検出して、撮像素子6の駆動、画像処理部21の動作、記録処理部23の圧縮処理などを制御する。さらに表示部22によって光学ファインダ、液晶モニター等に情報表示を行う情報表示装置の各セグメントの状態を制御する。
The control system controls the imaging system, the image processing system, and the recording / reproducing system in response to external operations as described above. For example, the pressing of the
カメラシステム制御部25はAFセンサ26とAEセンサ27と接続しており、これらからの信号を基にレンズ、絞り等を適切に制御する。さらにカメラシステム制御部25は振れセンサ8と接続しており、画像の振れ補正を行うモードにおいては、振れセンサ8の信号を基に振れ補正ユニット9を駆動する。
The camera
図3から図11を用いて、本実施例1における振れ補正ユニット9の要部について説明する。
The main part of the
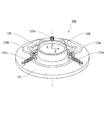
図3は振れ補正ユニット9の斜視図であり、図4は振れ補正ユニット9の被写体側から見た分解斜視図である。
3 is a perspective view of the
図3及び図4において、31は固定部材であるベース板、38は可動鏡筒(可動部材)、2a,32b,32cはベース板31と可動鏡筒38に狭持された球である。12は可動鏡筒38に固定され、撮影時に画像振れを補正するための補正光学系である。33a,33bはコイル、34a,34bは磁石、35はヨーク(磁石吸着板)、36a,36bは吸着板固定ネジである。37a,37b,37cはバネからなる弾性体である。39a,39bは補正光学系12の移動方向の制動を与える、つまり振れに適した粘性抵抗を与えるダンパー手段であるダンパーユニットである。
3 and 4,
なお、図3から後述の図9では、振れ補正ユニット9の主要部分だけを示し、保持部材やリード線等は示していない。
From FIG. 3 to FIG. 9, which will be described later, only the main part of the
図3及び図4を用いて、ベース板31と可動鏡筒38の相対運動について説明する。
The relative movement of the
補正光学系12は、ベース板31に対し、X方向およびY方向に移動可能な可動鏡筒38に固定されている。ベース板31と可動鏡筒38は球32a,32b,32cを狭持しており、球32a,32b,32cを介して相対運動を行う。このため、転がり摩擦という非常に小さな摩擦の影響しか受けずに相対運動を行うことができる。摩擦が小さいために非常に小さな入力に対しても適切に応答することができる。また、球32a,32b,32cによる案内面を適切な精度で製作することにより、ベース板31と可動鏡筒38が相対運動を行った場合でも、可動鏡筒38の傾きや光軸方向への不要な移動が発生することが無い。
The correction
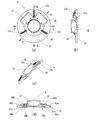
図5は振れ補正ユニット9の構成図である。詳しくは、図5(a)は光軸方向から見た正面図、図5(b)は図5(a)におけるA−A断面図、図5(c)は図5(a)におけるB−B断面図、図5(d)は図5(a)におけるC−C断面図である。
FIG. 5 is a configuration diagram of the
図5(a)に示したように、可動鏡筒38はベース板31に対して複数の弾性体37a,37b,37cで弾性支持されている。本実施例1では、弾性体37a,37b,37cが光軸から放射状に120度の間隔で3本配置されている。このような対称な配置とすることで、モーメントの発生による不要共振の励起を抑制することが可能となる。さらに、電源オフ時の補正光学系12の垂れ下がりを防止することが可能であり、高価なロック機構等が不要となり、コストダウンが図ることができる。
As shown in FIG. 5A, the
また、複数の弾性体37a,37b,37cにより弾性支持されることで、補正光学系12の可動中心を常に光軸中心に位置させることが可能となり、高価な補正光学系12の位置検出装置を使ったフィードバック制御が不要となる。よって、コストダウンが図ることができる。弾性体37a,37b,37cの弾性係数の決定方法については後述する。
Further, by being elastically supported by the plurality of
図5(b)に示したように、弾性体37a,37b,37cは光軸方向に適宜傾けて取り付けられており、ベース板31と可動鏡筒38の間に設けられた球32a,32b,32cを把持している。
As shown in FIG. 5 (b), the
図5(c)に示したように、ベース板31にはコイル33a(33b)が固定されており、可動鏡筒38には磁石34a(34b)およびヨーク35が固定されている。これらにより、いわゆるムービングマグネット型のアクチュエータ(駆動手段)を構成している。
As shown in FIG. 5C, the
図5(a)において、可動鏡筒38の紙面右上側には第1の電磁アクチュエータが配置されている。この第1の電磁アクチュエータは、ベース板31に取り付けられたコイル33aと、可動鏡筒38に取り付けられた磁石34aおよびヨーク35により構成されている。さらに、可動鏡筒38の紙面左上側には、第2の電磁アクチュエータが配置されている。この第2の電磁アクチュエータは、ベース板31に取り付けられたコイル33bと、可動鏡筒38に取り付けられた磁石34bおよびヨーク35により構成されている。
In FIG. 5A, the first electromagnetic actuator is disposed on the upper right side of the
次に、ダンパー手段であるダンパーユニット39a,39bの取り付けについて説明する。
Next, attachment of the
図5(d)において、44a,44bはダンパーユニット39a,39bのダンパー保持枠、45a,45bは減衰手段、46a,46bはダンパー抵抗棒である。ダンパーユニット39a,39bはベース板31に設けられた円柱形の穴31a,31b(図4参照)に対して、接着等で取り付けられる。ダンパー抵抗棒46a,46bは可動鏡筒38に設けられた円柱状の穴38a,38b(図4参照)に差し込まれ、接着等で固定される。
In FIG. 5D, 44a and 44b are damper holding frames of the
また、ダンパーユニット39a,39bは光軸対称に複数設けられることが望ましい。本実施例1では、図5(d)に示すように、光軸4に対して対称な位置に2つ設けられている。光軸4に対称に設けることで、ベース板31と可動鏡筒38が相対運動を行ったときに、ダンパーユニット39a,39bから受ける力によって可動鏡筒38にモーメントが発生することが無い。
It is desirable that a plurality of
図6はダンパーユニット39aの詳細図である。図6(a)はその上面図、図6(b)は側面図である。なお、ダンパーユニット39bも同じである。
FIG. 6 is a detailed view of the
ダンパー保持枠44aに対し、ダンパー抵抗棒46aがほぼ同心円状になるように配置され、その隙間にドーナツ状に減衰手段45aが具備される。減衰手段45aは様々な粘弾性体を用いることが可能であるが、本実施例1では、組付け性や耐環境性に優れた紫外線または熱硬化シリコーンゲルなどを用いている。減衰手段45a,45bはダンパー保持枠44a,44bとダンパー抵抗棒46a,46bとの間を粘弾性支持する。減衰手段45a,45bとして用いる粘弾性体の望ましい特性については後述する。
The
ここで、本実施例1では、ダンパーユニット39a,39bをベース板31上に設けられた円柱状の穴31a,31b(図4参照)に取り付け、ダンパー抵抗棒46a,46bを可動鏡筒38に接着させている。しかし、可動鏡筒38上に円柱状の穴を設け、そこにダンパーユニットを取り付け、ダンパー抵抗棒をベース板31に接着させても構わない。
Here, in the first embodiment, the
次に、図7を用いて、振れ補正ユニット9の上記した駆動手段について説明する。図7は駆動手段の模式図であり、図7(a)は磁石とコイルのみを光軸方向から見た図、図7(b)は磁石を中心付近で切断した時の断面図を示している。
Next, the drive means of the
図7(a),(b)において、43は着磁境界を示している。また、図7(b)において、42a,42b,42cは磁石34a、コイル33a近傍の代表的な磁力線を模式的に表している。
7A and 7B,
図7(a)に示したように、着磁境界43を挟んで磁石34aは2つの領域34a1,34a2に分けて着磁されている。このとき、着磁境界43は駆動手段で発生する力の方向と直交する方向であり、図7(a)の上下方向に着磁境界が存在し、左右方向に駆動される。コイル33aは光軸方向から見たときに小判型をしており、二つの長手部分33a1,33a2が磁石の2つの領域34a1,34a2と対向するように配置されている。
As shown in FIG. 7A, the
また、図7(b)に示したように、磁石34aのコイル33aと反対側の面には、ヨーク35aがある。ヨーク35aは望ましくは軟磁性体であり、多くの磁束を透過させ,磁気回路のパーミアンスを下げている。その結果、42a,42bのように磁石34aとコイル33aの間で比較的直線的に磁力線が生じている。
Moreover, as shown in FIG.7 (b), the
磁石吸着板として機能するヨーク35a,35bは本実施例1では可動鏡筒38に固定されるので、厚みを増すと可動部の重量も増加してしまう。そこで、ヨーク35a,35bの外形、飽和磁束密度および磁石の形状、表面磁束密度などを考慮して、ヨーク35a,35bが飽和磁束近傍となるように決めるのが好ましい。この状態でコイル33aに通電すると、図7(b)の紙面垂直方向で二つの長手部分33a1と33a2に反対方向に電流が流れる。したがって、フレミング左手の法則によって駆動力が発生する。図6(a)で説明したように可動鏡筒38は弾性支持されているので、弾性体37a,37b,37cの合力と駆動力がつりあう位置までベース板31と可動鏡筒38の間に相対運動が生じる。
Since the
図8を用いて、本実施例1において減衰手段45a,45bとして用いる好適な粘弾性体の特性について説明する。 The characteristics of a suitable viscoelastic body used as the damping means 45a and 45b in the first embodiment will be described with reference to FIG.
粘弾性体は一般的に図8に示したように、入力周波数によってその特性が変化する。よく知られているように、粘弾性体においては、周波数の増加は温度の低下と同様の物性を示す。つまり、図8に示したように転移領域51bを挟んで、低い周波数の領域51aでゴム物性を示し(以下、ゴム領域)、高い周波数の領域51cでガラス物性を示す(以下、ガラス領域)。ゴム領域では柔らかく、ガラス領域ではゴム領域に比べて100〜1000倍程度のヤング率になる。一般的に、ゴム領域とガラス領域の中間にある転移領域51bで複素弾性係数における実数部と虚数部の比であるtanδが大きくなる。tanδは粘弾性体の応力歪み線図のヒステリシスを示しており、大きな値の方が効率よく、運動エネルギーを熱エネルギーに変換できる。
As shown in FIG. 8, the viscoelastic body generally changes its characteristics depending on the input frequency. As is well known, in a viscoelastic body, an increase in frequency exhibits the same physical properties as a decrease in temperature. That is, as shown in FIG. 8, with the
そこで、本実施例1では、手振れに適用することを考慮して、制御周波数帯域を0.3Hz−100Hz程度に設定する。制御周波数帯域の好適な設定方法に関しては後述する。この制御周波数帯域が転移領域51bに含まれ、tanδが大きい材料が好ましい。近年上記のような材料も多く開発されており、一般的なブチルゴムに加え、シリコンを主成分とするゲル、エラストマーなどの様々な商品が提供されている。一例としては、内外ゴム製ハネナイト、宮坂ゴム製ミヤフリーク、スリーボンド製TB3168等が好適な粘弾性材料と言える。
Therefore, in the first embodiment, the control frequency band is set to about 0.3 Hz to 100 Hz in consideration of application to camera shake. A preferred method for setting the control frequency band will be described later. A material in which this control frequency band is included in the
次に、駆動手段の設計について、図9を用いて説明する。 Next, the design of the driving means will be described with reference to FIG.
図9は、本実施例1における補正光学系の駆動手段の1軸方向の運動をモデル化した図である。図9(a)は減衰手段が無い場合のモデルを示しており、図9(b)は減衰手段を介在させた場合のモデルを示している。 FIG. 9 is a diagram modeling movement in one axis direction of the driving unit of the correction optical system according to the first embodiment. FIG. 9A shows a model when there is no attenuation means, and FIG. 9B shows a model when the attenuation means is interposed.
本実施例1の振れ補正ユニット9は、複数の弾性体を有しているが、特定の移動方向を考えた場合、複数の弾性体の合力を仮想的な一つのバネ、ダッシュポッドとして考えることができる。図9(a)に示したように1自由度のバネ質点系として表現できる。このときの力Fに対する変位xは、以下の式(1)で表される。
The

このとき、図6で説明したように、小さい摩擦しか受けない構成となっているため、一般的に粘性抵抗は小さく、cの値は小さな値になる。その結果、図9(a)では共振が強く見られる機構になる。つまり、小さな振幅の入力に対して適切に応答できるものの、外乱などの影響を受けやすい機構といえる。ここで、減衰比ζを次の式(2)で定義する。 At this time, as described with reference to FIG. 6, the structure is configured to receive only a small amount of friction, so that the viscous resistance is generally small and the value of c is small. As a result, in FIG. 9 (a), the resonance is strongly observed. That is, it can be said that the mechanism can respond appropriately to an input with a small amplitude, but is easily affected by a disturbance. Here, the damping ratio ζ is defined by the following equation (2).
この減衰比ζを用いてバネ質点系の共振峰の状態や過渡応答を把握することができる。 Using this damping ratio ζ, it is possible to grasp the resonance peak state and transient response of the spring mass system.
図9(b)は減衰手段45a,45bを介在させた系であり、上記の弾性体37a,37b,37cと同様に、減衰体45の合力を仮想的な一つのバネ、ダッシュポッドとみなしたモデル図である。k1,c1は弾性体によるバネ、ダッシュポッドを、k2,c2は減衰手段45a,45bによるバネ、ダッシュポッドを示している。図9(b)の力Fに対する変位xは、以下の式(3)で表される。
FIG. 9B shows a system in which damping means 45a and 45b are interposed. Like the
図8で説明したような好適な粘弾性体を減衰手段45a,45bとして用いている場合、k2とc2の比であるtanδは制御周波数帯域で比較的大きな値を示している。好適な材料の中では0.5程度得られるものもある。このように大きなtanδが得られるので、k2が小さな値であっても十分な減衰を得ることができる。つまり、アクチュエータの感度を低下させずに減衰を適切に付与できる。このときの減衰比は明らかに次の式(4)で表される。 When a suitable viscoelastic body as described in FIG. 8 is used as the damping means 45a and 45b, tan δ, which is the ratio of k2 and c2, shows a relatively large value in the control frequency band. Some suitable materials can be obtained on the order of 0.5. Since a large tan δ is obtained in this way, sufficient attenuation can be obtained even if k2 is a small value. That is, attenuation can be appropriately imparted without reducing the sensitivity of the actuator. The attenuation ratio at this time is clearly expressed by the following equation (4).
次に、図11を用いて、本実施例1に示す振れ補正ユニット9の好適な制御について説明する。図11は振れ補正ユニット9の制御信号を生成する信号処理回路のブロック図である。
Next, suitable control of the
図11において、61は振れセンサ8の一例である角速度センサ、62は低域通過フィルタ(以下、LPF)、63はCPU、64はA/D変換器、65は積分器である。66は高域通過フィルタ(以下、HPF)、67は撮像装置1のズーム情報等の各種の情報を記録したメモリ、68は補正光学系12の位置を計算する補正光学系位置変換器、69は補正光学系位置制御器、70は駆動手段、9は振れ補正ユニットである。
In FIG. 11, 61 is an angular velocity sensor which is an example of the
図11に示すように、手振れ等の振れを検出する振れセンサ8としては、角速度センサが多くの場合用いられている。本実施例1においても角速度センサ61を用いた場合を例として、以下の説明を行う。
As shown in FIG. 11, an angular velocity sensor is often used as the
角速度センサ61は手振れ等の振れによる角速度を検出し、角速度に比例した信号を出力する。LPF62はノイズカットのために設けられており、角速度センサ61の高域ノイズをカットする。CPU63は振れ補正に必要な制御のための演算を行うものであり、内部にA/D変換器64、積分器65、HPF66、メモリ67、補正光学系位置変換器68、補正光学系制御器69を備えている。以下に、各部の働きについて説明する。
The
A/D変換器64は、LPF62を通過した信号を適切なサンプリング周期でデジタル変換する。サンプリング周期は制御周波数帯域の100倍程度あることが望ましい。例えば50Hzまでの制御を行う振れ補正ユニット9においては、5000Hz程度のサンプリング周期であればサンプリングの影響を無視できて好適である。積分器65は、角速度信号を積分し、手振れによる角度を求める。HPF66は、角速度センサ61の低周波ゆらぎを除去するフィルタである。フィルタ時定数は前記低周波ゆらぎと制御周波数帯域を考慮して適切に設定される。
The A /
また、HPF66はメモリ67からズーム情報などの撮影条件の情報を取得し、適切にフィルタの時定数を変更することも出来る。補正光学系位置変換器68は、メモリ67から得たズーム、フォーカスなどの情報から、入力された振れに対する振れ補正ユニット9に具備される補正光学系12の移動量を計算する。補正光学系位置制御器69は振れ補正ユニット9の周波数特性などを考慮して適切な位相補償などを行う。また、補正光学系位置制御器69はその結果を駆動手段に出力し、振れ補正ユニット9の駆動制御を行う。
Further, the
ここで、任意の位置センサによって補正光学系の位置検出を行い、いわゆるフィードバック制御を行うことでも任意の位置に移動可能である。 Here, the position of the correction optical system is detected by an arbitrary position sensor and can be moved to an arbitrary position by performing so-called feedback control.
次に、本実施例1における振れ補正ユニット9の組立に関して説明する。なお、図12〜図15において、後述する組立台47とダンパー押え具48a,48b以外のものは、図3〜図6で示したものと同じものである。
Next, assembly of the
図12は組立台に乗った状態の振れ補正ユニット9の斜視図であり、図13は振れ補正ユニット9の被写体側から見た分解斜視図である。なお、これらの図において、47は組立台、48a,48bはダンパーユニット39a,39bのダンパー押え具である。
FIG. 12 is a perspective view of the
図14はダンパーユニット39a,39bを組立時における振れ補正ユニット9の構成図である。詳しくは、図14(a)は光軸方向から見た正面図、図14(b)は図14(a)におけるA−A断面図、図14(c)は図14(a)におけるB−B断面図、図14(d)は図14(a)におけるC−C断面図である。
FIG. 14 is a configuration diagram of the
図15はダンパー押え具(規制部材)48a付きのダンパーユニット39aの詳細図である。図15(a)はその上面図、図15(b)は側面図である。
FIG. 15 is a detailed view of a
ダンパーユニット39aは以下のようにして組み立てられる。まず、ダンパー押え具48aにダンパー保持枠44a(第1の取付部)を乗せる。ここで、ダンパー保持枠44aにはダンパー押え具48aを保持する為の保持部44cが設けられている。つまり、図15(b)に示すように、ダンパー押え具48aに対し、ベース板31に取り付けられるダンパー保持枠44aの内径開口が保持部44cとして働く。また、ダンパー押え具48aの孔48cに可動鏡筒38に取り付けられるダンパー抵抗棒(第2の取付部)46aの一端が嵌入される。
The
そのため、第1の取付部であるダンパー保持枠44aと第2の取付部であるダンパー抵抗棒46aはダンパー押え具48aで固定(規制)され、可動鏡筒38や地板であるベース板31に組み込むときに安定して組み込める。
Therefore, the
次に、ダンパー保持枠44aの中のダンパー抵抗棒46aの周辺に減衰手段45aを具備する。つまり、紫外線または熱硬化シリコーンゲルを流し込む。そして、紫外線または熱を掛け、シリコーンゲルを硬化させる。
Next, damping
図16は、振れ補正ユニット9の組立手順を示すフローチャートであり、図12から図15を参照しながら説明する。
FIG. 16 is a flowchart showing an assembly procedure of the
まず、ステップS101では、図12に示すように、組立台47にベース板31を乗せる。このとき、組立台47の2本の柱47a,47b(図13参照)がベース板31の穴部31c,31d(図13参照)に嵌合して位置決めされる。次のステップS102では、ベース板31にコイル33a,33bを乗せ、接着等で固定する(図13、図14(c)参照)。このコイル33a,33bも、組立台47の2本の柱47a,47bに嵌合して位置決めされる。次のステップS103では、ベース板31に球32a,32b,32cを乗せる(図12〜図14(b)参照)。
First, in step S101, the
次のステップS104では、組立台47の中央部に可動鏡筒38を乗せる(図12〜図14参照)。このとき、可動鏡筒38は組立台47に位置決めされ、可動鏡筒38は球32a,32b,32cと接しない高さになるようになっている。したがって、組立途中で球32a,32b,32cに負荷がかかり、ベース板31に打痕等の傷を付けることがなくなる。ここで、可動鏡筒38には予め補正光学系12を熱かしめや接着等で固定してある。次のステップS105では、組立台47の穴部47c,47d(図13参照)を通してダンパー押え具48a,48b付きのダンパーユニット39a,39bを、ベース板31の穴部31a,31bに接着等で固定する(図14(d)、図15参照)。
In the next step S104, the
次のステップS106では、ダンパー抵抗棒46a,46bを可動鏡筒38の穴部38a,38b(図13参照)に挿入し、接着等で固定する(図14(d)参照)。次のステップS107では、ダンパー押え具48a,48bを外す(図14(d)→図5(d)参照)。次のステップS108では、ベース板31と可動鏡筒38に弾性体37a,37bを掛ける(図12〜図14参照)。
In the next step S106, the
次のステップS109では、磁石34a,34bとヨーク35を可動鏡筒38にネジ36a,36bで固定する(図13、図14(c)参照)。このとき、組立台47の柱47a,47bは磁石34a,34bを受けている。次のステップS110では、コイル33a,33bに不図示の配線をして、動作チェックをする。そして、ステップS111にて、組立台47から組み上がった振れ補正ユニット9を取り外す(図14(d)、図5(d)参照)。
In the next step S109, the
ここで、補正光学系12は予め可動鏡筒38に固定して置かずに、直接組み込んでも構わない。また、磁石34a,34bとヨーク35は予め可動鏡筒38に組み込んで置いていても構わない。また、上記図16の組立フローは本発明の一例であって、別の順番で組んでも構わない。
Here, the correction
上記の実施例1によれば、振れ補正ユニット9は、固定部材であるベース板31に取り付けられるダンパー保持枠(第1の取付部)44a,44bと、可動部材である可動鏡筒38に取り付けられるダンパー抵抗棒(第2の取付部)46a,46bを有する。さらには、ダンパー保持枠44a,44bとダンパー抵抗棒46a,46bとの間を粘弾性支持する減衰手段45a,45bとをユニット化して成るダンパーユニット(ダンパー手段)39a,39bを有する。ダンパーユニット39a,39bは、補正光学系12の移動方向の制動を行うものである。
According to the first embodiment, the
上記のようにダンパー手段であるダンパーユニット39a,39bをユニット化することで、量産安定性と組立安定性を向上させ、コストダウンを図ることが可能となる。また、簡単な構成のダンパーユニット39a,39bを備えることにより、画像振れ補正に適した粘性抵抗を得ることができる。
By unitizing the
また、可動鏡筒38とベース板31によって狭持された複数の球32a,32b,32cと、可動鏡筒38をベース板31の方向に付勢する複数の弾性体37a,37b,37cを備えている。よって、転がり摩擦という小さな摩擦によりベース板31に対して可動鏡筒38を移動させることができ、振れ補正を適切に行うことができる。
Further, a plurality of
また、可動鏡筒38とベース板31の間に取り付けられた複数の弾性体37a,37b,37cを備えているので、補正光学系12の可動中心を常に光軸4の中心に位置させることができ、高価な位置検出装置を不要とすることができる。
In addition, since the plurality of
また、駆動手段を光軸4に垂直な略同一平面に配置しているので、装置を薄型化することができる。
In addition, since the driving means is arranged on substantially the same plane perpendicular to the
また、減衰手段45a,45bを光軸4に対して線対称または点対称に複数設けている。よって、ベース板31に対して可動鏡筒38が移動したときに、ダンパーユニット39a,39bから受ける力によって可動鏡筒38にモーメントが発生することが無い。なお、減衰手段45a,45bはシリコンを主成分とするゲル、エラストマー、もしくは、ブチルゴムなどにより構成している。
A plurality of attenuating means 45 a and 45 b are provided in line symmetry or point symmetry with respect to the
また、駆動手段がオープン制御されるようにしているので、制御系を簡単な構成にすることができる。 Further, since the drive means is controlled to be open, the control system can be made simple.
図17ないし図25を用いて、本発明の実施例2に係る振れ補正ユニットについて説明する。 A shake correction unit according to the second embodiment of the present invention will be described with reference to FIGS.
以下、図17ないし図21を用いて、本実施例2に係る振れ補正ユニット190の詳しい説明を行う。上記実施例1の振れ補正ユニット9との違いは、ダンパーユニット139a,139bの構成と、駆動手段がいわゆるムービングコイル式を用いたところである。
Hereinafter, the
本実施例2の振れ補正ユニット190が組み込まれる撮像装置やその電気的構成は実施例1と同様であるので、ここではその説明は割愛する。
Since the imaging apparatus in which the
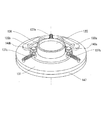
図17は振れ補正ユニット190の斜視図、図18は振れ補正ユニット190の被写体側から見た分解斜視図である。
17 is a perspective view of the
図19及び図20において、131はベース板(固定部材)、138は可動鏡筒(可動部材)、132a,132b,132cはベース板131と可動鏡筒138に狭持された球である。120は可動鏡筒138に固定され、撮影時に像振れを補正するための補正光学系である。133a,133bはコイル、134a,134bは磁石、135a,135bはヨーク、137a,137b,137cは弾性体である。
19 and 20, 131 is a base plate (fixed member), 138 is a movable lens barrel (movable member), and 132a, 132b, and 132c are spheres held between the
なお、図17から図21では振れ補正ユニット190の主要部分だけを示し、保持部材やリード線等は示していない。
Note that FIGS. 17 to 21 show only the main part of the
次に図17及び図18を用いて、ベース板131と可動鏡筒138の相対運動について説明する。
Next, the relative movement between the
補正光学系120は、ベース板131に対しX方向およびY方向に移動可能な可動鏡筒138に固定されている。ベース板131と可動鏡筒138は球132a,132b,132cを狭持しており、球132a,132b,132cを介して相対運動を行う。このため、転がり摩擦という非常に小さな摩擦の影響しか受けずに相対運動を行うことができる。摩擦が小さいために非常に小さな入力に対しても適切に応答することが出来る。また、球132a,132b,132cによる案内面を適切な精度で製作することにより、ベース板131と可動鏡筒138が相対運動を行った場合でも、可動鏡筒138の傾きや光軸方向への不要な移動が発生することが無い。
The correction
図19は振れ補正ユニット190の平面図である。図19(a)は光軸方向から見た正面図、図19(b)は図19(a)におけるA−A断面図、図19(c)は図19(a)におけるB−B断面図、図19(d)は図19(a)におけるC−C断面図である。
FIG. 19 is a plan view of the
図19(a)に示したように、可動部材の支持方法は実施例1と同じ方法を取っている。つまり、可動鏡筒(可動部材)138はベース板(固定部材)131に対して複数の弾性体137a,137b,137cで弾性支持されている。本実施例2では、弾性体137a,137b,137cが光軸104から放射状に120度の間隔で3本配置されている。このような対称な配置とすることで、モーメントの発生による不要共振の励起を抑制することが可能となる。さらに、電源オフ時の補正光学系120の垂れ下がりを防止することが可能であり、高価なロック機構等が不要となり、コストダウンが図れる。また、複数の弾性体137a,137b,137cにより弾性支持されることで、補正光学系120の可動中心を常に光軸中心に位置させることが可能となる。よって、高価な補正光学系120の位置検出装置を使ったフィードバック制御が不要となり、コストダウンを図ることができる。
As shown in FIG. 19A, the movable member is supported by the same method as in the first embodiment. In other words, the movable barrel (movable member) 138 is elastically supported by the plurality of
図19(b)に示したように、弾性体137a,137b,137cは光軸方向に適宜傾けて取り付けられており、ベース板131と可動鏡筒138の間に設けられた球132a,132b,132cを把持している。
As shown in FIG. 19B, the
図19(c)等に示したように、可動鏡筒138にはコイル133a(133b)が固定されており、ベース板131には磁石134a(134b,134c)及びヨーク135a(135b)が固定されている。これにより、いわゆるムービングコイル型のアクチュエータ(駆動手段)を構成している。
As shown in FIG. 19C and the like, the
図19(a)において、可動鏡筒138の紙面右上側には第1の電磁アクチュエータが配置されている。この第1の電磁アクチュエータは、可動鏡筒138に取り付けられた第1のコイル133aと、ベース板131に取り付けられた磁石134a及びヨーク135aにより構成されている。さらに、可動鏡筒138の紙面左上側には、第2の電磁アクチュエータが配置されている。この第2の電磁アクチュエータは、可動鏡筒138に取り付けられた第2のコイル133bと、ベース板131に取り付けられた磁石134b及びヨーク135bにより構成されている。
In FIG. 19A, the first electromagnetic actuator is disposed on the upper right side of the
次に、ダンパー手段であるダンパーユニット139a,139bの取り付けについて説明する。
Next, attachment of the
図19(d)等において、144a,144bはダンパーユニット139a,139bのダンパー保持枠、145a,145bは減衰手段、146a,146bはダンパー内枠である。ダンパーユニット139a,139bは、可動鏡筒138に設けられた円柱形の穴138a,138b(図18)に対して接着等で取り付けられる。また、ダンパーユニット139a,139bのダンパー内枠146a,146bにはベース板131に設けられた円柱状の軸131a,131b(図18参照)が圧入される。
In FIG. 19D and the like, 144a and 144b are damper holding frames of the
ダンパーユニット139a,139bは光軸対称に複数設けられることが望ましい。本実施例2では、図19(d)に示すように、光軸104に対して対称な位置に2つ設けられている。光軸104に対称に設けることで、ベース板131と可動鏡筒138が相対運動を行ったときに、ダンパー手段であるダンパーユニット139a,139bから受ける力によって可動鏡筒138にモーメントが発生することが無い。
It is desirable to provide a plurality of
図20はダンパーユニット139aの詳細図である。図20(a)はその側面図、図20(b)はその下面図である。なお、ダンパーユニット139bも同じである。
FIG. 20 is a detailed view of the
ダンパー保持枠144aに対し、ダンパー内枠146aがほぼ同心円状になるように配置され、その隙間にドーナツ状に減衰手段145aが具備されている。減衰手段145aは様々な粘弾性体を用いることが可能であるが、本実施例2では、組付け性や耐環境性に優れた紫外線または熱硬化シリコーンゲルなどを用いている。
The damper
ここで、本実施例2では、ダンパーユニット139a,139bを可動鏡筒138上に設けられた円柱状の穴138a,138bに取り付け、ベース板131上に設けられた円柱状の軸131a,131bをダンパー内枠146aに圧入させている。しかし、ベース板131上に円柱状の穴を設け、そこにダンパーユニットを取り付け、可動鏡筒138上に設けられた円柱状の軸をダンパー内枠に圧入させても構わない。
Here, in the second embodiment, the
次に、図21を用いて、振れ補正ユニット190の上記したコイル133a(133b)、磁石134a(134b)およびヨーク135a(135b)により構成される駆動手段について説明する。
Next, with reference to FIG. 21, a driving unit including the above-described
図21は駆動手段の模式図であり、図21(a)は磁石134a(134b)とコイル133a(133b)のみを光軸方向から見た図、図21(b)は磁石134a(134b)を中心付近で切断した時の断面図である。
FIG. 21 is a schematic diagram of the driving means. FIG. 21A is a view of only the
図21(a),(b)において、143は着磁境界である。また、図21(b)において、142a,142b,142cは磁石134a(134b)、コイル133a(133b)近傍の代表的な磁力線を模式的に表している。
In FIGS. 21A and 21B,
図21に示すように、着磁境界143を挟んで磁石134aは二つの領域134a1,134a2に分けて着磁されている。このとき、着磁境界143は駆動手段で発生する力の方向と直交する方向であり、図21(a)の上下方向に着磁境界が存在し、左右方向に駆動される。コイル133aは光軸方向から見たときに小判型をしており、二つの長手部分133a1,133a2が二つの磁石134a1,134a2と対向するように配置されている。
As shown in FIG. 21, the
また、図21(b)に示すように、磁石134aのコイル133aと反対側の面には、固定ヨーク135aがある。固定ヨーク135aは望ましくは軟磁性体であり、図21(b)のように多くの磁束を透過させ磁気回路のパーミアンスを下げている。その結果、142a,142bのように磁石134aとコイル133aの間に比較的直線的に磁力線が生じている。
As shown in FIG. 21B, a fixed
固定ヨーク135a,135bはベース板131に固定されるので、重量を気にすることなく磁束が飽和しないように適切な厚みとすることができる。この状態でコイル133aに通電すると、図21(b)の紙面垂直方向で133a1,133a2に反対方向に電流が流れる。これにより、フレミング左手の法則によって駆動力が発生する。図21(a)で説明したように可動鏡筒138は弾性支持されているので、弾性体137a,137b,137cの合力と駆動力がつりあう位置までベース板131と可動鏡筒138の間に相対運動が生じる。
Since the fixed
ここで、本実施例2に好適な減衰手段145a,145bとしての粘弾性体は、実施例1と同様のものである。また、本実施例2に示す振れ補正ユニット190の制御方法についても、実施例1と同様なので割愛する。また、任意の補正光学系位置センサによって位置検出を行い、いわゆるフィードバック制御を行うことでも任意の位置に移動可能である。
Here, the viscoelastic body as the damping means 145a and 145b suitable for the second embodiment is the same as that of the first embodiment. Further, the control method of the
次に、本実施例2における振れ補正ユニット190の組立に関して説明する。なお、図22〜図24において、後述する組立台147とダンパー押え具148a,148b以外のものは、図17〜図21で示したものと同じものである。
Next, assembly of the
図22は組立台に乗った状態の振れ補正ユニット190の斜視図、図23は振れ補正ユニット190の被写体側から見た分解斜視図である。図22及び図23において、これらの図において、147は組立台、148a,148bはダンパーユニット139a,139bのダンパー押え具である。
FIG. 22 is a perspective view of the
図24は振れ補正ユニット190の構成図である。詳しくは、図24(a)は光軸方向から見た正面図、図24(b)は図24(a)におけるA−A断面図、図24(c)は図24(a)におけるB−B断面図、図24(d)は図24(a)におけるC−C断面図である。
FIG. 24 is a configuration diagram of the
図25はダンパー押え具(規制部材)148a付きのダンパーユニット139aの詳細図である。詳しくは、図25(a)はその側面図、図25(b)はその下面図である。
FIG. 25 is a detailed view of a
ダンパーユニット139aのダンパー保持枠(第2の取付部)144aに、ダンパー押え具148aを乗せる。ここで、ダンパーユニット139aにはダンパー押え具148aを保持する為の保持部を設けてある。具体的には、図25(a)において、ダンパー押え具148aは可動鏡筒138に取り付けられるダンパー保持枠(第2の取付部)144aの内径開口を保持部144cとしてダンパーユニット139aに保持される。そして、ダンパー押え具148aの孔148cが、ベース板131に設けられた円柱状の軸131a(図18参照)に取り付けられるダンパー内枠(第1の取付部)146aの外周部146a1に嵌合している。
The
そのため、第2の取付部であるダンパー保持枠144aと第1の取付部であるダンパー内枠146aはダンパー押え具148aで固定(規制)され、可動鏡筒138やベース板131に組み込むときに安定して組み込める。
Therefore, the
次に、ダンパー保持枠144a,144bとダンパー内枠146a,146bの間に減衰手段145a,145bを具備する。つまり、紫外線または熱硬化シリコーンゲルを流し込む。次に、紫外線または熱を掛け、シリコーンゲルを硬化させる。
Next, damping means 145a and 145b are provided between the
組立フローチャートは、実施例1とほぼ同様であるので、ここでは割愛する。 Since the assembly flowchart is almost the same as that of the first embodiment, it is omitted here.
上記の実施例2によれば、振れ補正ユニット190は、固定部材であるベース板131に取り付けられるダンパー内枠(第1の取付部)146a,146bを有する。さらに、可動部材である可動鏡筒138に取り付けられるダンパー保持枠(第2の取付部)144a,144bを有する。さらには、ダンパー保持枠144a,144bとダンパー内枠146a,146bとの間を粘弾性支持する減衰手段145a,145bとをユニット化して成るダンパーユニット(ダンパー手段)139a,139bを有する。ダンパーユニット139a,139bは、補正光学系120の移動方向の制動を行うものである。
According to the second embodiment, the
上記のようにダンパー手段であるダンパーユニット139a,139bをユニット化することで、量産安定性と組立安定性を向上させ、コストダウンを図ることが可能となる。また、簡単な構成のダンパーユニット139a,139bを備えることにより、画像振れ補正に適した粘性抵抗を得ることができる。
By unitizing the
その他の効果は、上記実施例1と同様である。 Other effects are the same as those of the first embodiment.
図26ないし図29は、本発明の実施例3に係わる撮像装置および該撮像装置に具備される振れ補正ユニット290を示している。上記実施例1における振れ補正ユニット9と本実施例3における振れ補正ユニット290との違いは、補正手段として、補正光学系12の代わりに撮像素子206を用いている。そして、該撮像素子206を駆動手段により光軸と直交する平面内で移動させて、画像振れを行う構成にしている。
26 to 29 show an imaging apparatus according to
図26は、振れ補正ユニット290が組み込まれる撮像装置を示す図である。
FIG. 26 is a diagram illustrating an imaging apparatus in which the
図26において、201は撮像装置、202は撮像レンズ、203はレンズ駆動部、204は撮像レンズ202の光軸、205はレンズ鏡筒、206は撮像素子である。207はメモリ、208は振れ検出手段として用いられる振れセンサ、209は撮像素子駆動部、210は電源、211はレリーズ釦、213はいわゆるクイックリターンミラー、214はファインダ光学系である。290は振れ補正ユニット(イメージセンサユニット)であり、撮像素子206を具備している。
In FIG. 26, 201 is an imaging device, 202 is an imaging lens, 203 is a lens driving unit, 204 is an optical axis of the
図27は、撮像装置201の電気的構成を示すブロック図である。撮像装置201は、撮像系、画像処理系、記録再生系、制御系を有する。撮像系は、撮像レンズ202、撮像素子206を含み、画像処理系は、A/D変換器220、画像処理部221を含む。記録再生系は、記録処理部223、メモリ224を含む。制御系は、カメラシステム制御部225、AFセンサ226、AEセンサ227、振れセンサ208、操作検出部229、撮像素子制御部212およびレンズシステム制御部230を含む。
FIG. 27 is a block diagram illustrating an electrical configuration of the
本実施例3に係わる撮像装置201やその電気的構成は実施例1とほぼ同様であるので、ここでは詳しい説明は省略する。本実施例3に係る振れ補正ユニット290の要部については後述する。
Since the
図28は振れ補正ユニット290の構成図である。詳しくは、図28(a)は光軸方向から見た正面図、図28(b)は図28(a)におけるA−A面図、図28(c)は図28(a)におけるB−B断面図、図28(d)は図28(a)におけるC−C断面図である。
FIG. 28 is a configuration diagram of the
図28(a)に示したように、可動部材の支持方法は実施例1と同じ方法を取っている。つまり、可動枠(可動部材)238はベース板(固定部材)231に対して複数の弾性体237a,237b,237cで弾性支持されている。本実施例3では,弾性体237a,237b,237cが光軸204から放射状に120度の間隔で3本配置されている。このような対称な配置とすることで、モーメントの発生による不要共振の励起を抑制することが可能となる。さらに、電源オフ時の振れ補正ユニット290の垂れ下がりを防止することが可能であり、高価なロック機構等が不要となり、コストダウンが図れる。
As shown in FIG. 28A, the movable member is supported by the same method as in the first embodiment. That is, the movable frame (movable member) 238 is elastically supported by the plurality of
また、複数の弾性体237a,237b,237cにより弾性支持されることで、振れ補正ユニット290の可動中心を常に光軸中心に位置させることが可能であり、高価な振れ補正ユニット290の位置検出装置を使ったフィードバック制御が不要となる。よって、コストダウンを図ることができる。
Further, by being elastically supported by the plurality of
図28(b)に示したように、弾性体237a(237b,237c)は光軸方向に適宜傾けて取り付けられており、ベース板231と可動枠238の間に設けられた球232a(232b,232c)を把持している。
As shown in FIG. 28 (b), the
図28(c)に示したように、ベース板231にはコイル233a(233b)が固定されており、可動枠238には磁石234a(234b)及びヨーク235が固定されている。これにより、いわゆるムービングマグネット型のアクチュエータ(駆動手段)を構成している。
As shown in FIG. 28C, the
図28(a)において、可動枠238の紙面右上側には第1の電磁アクチュエータが配置されている。この第1の電磁アクチュエータは、ベース板231に取り付けられたコイル233aと、可動枠238に取り付けられた磁石234a及びヨーク235により構成されている。さらに、可動枠238の紙面左上側には、第2の電磁アクチュエータが配置されている。この第2の電磁アクチュエータは、ベース板231に取り付けられたコイル233bと、可動枠238に取り付けられた磁石234b及びヨーク235により構成されている。
In FIG. 28A, a first electromagnetic actuator is disposed on the upper right side of the
次に、ダンパー手段であるダンパーユニット239a,239bの取り付けについて説明する。
Next, attachment of the
図28(d)において、244a,244bはダンパーユニット239a,239bのダンパー保持枠(第1の取付部)、245a,245bは減衰手段、246a,246bはダンパー抵抗棒(第2の取付部)である。
In FIG. 28 (d), 244a and 244b are damper holding frames (first mounting portions) of the
ダンパーユニット239a,239bはベース板231に設けられた円柱形の穴231a,231b(後述の図29参照)に対して、接着等で取り付けられる。また、ダンパー抵抗棒246a,246bは可動枠238に設けられた円柱状の穴238a,238b(後述の図29参照)に差し込まれ、接着等で固定される。また、ダンパーユニット239a,239bは光軸対称に複数設けられることが望ましい。本実施例3では、図28(d)に示すように、光軸204に対して対称な位置に2つ設けられている。光軸204に対称に設けることで、ベース板231と可動枠238が相対運動を行ったときに、ダンパー手段であるダンパーユニット239a,239bから受ける力によって可動枠238にモーメントが発生することが無い。
The
ダンパーユニット239a,239bの詳細図は、実施例1と同様なので割愛する。また、振れ補正ユニット290の駆動手段についても、実施例1と同様なので説明を省略する。
Detailed views of the
また、本実施例3に好適な減衰手段245a,245b(粘弾性体)は、実施例1と同様のものである。また、本実施例3に示す振れ補正ユニット290の制御方法についても、実施例1と同様なので割愛する。
Further, damping means 245a and 245b (viscoelastic bodies) suitable for the third embodiment are the same as those of the first embodiment. Further, the control method of the
また、任意の撮像素子位置センサによって位置検出を行い、いわゆるフィードバック制御を行うことでも任意の位置に移動可能である。 Further, it is possible to move to an arbitrary position by performing position detection by an arbitrary image sensor position sensor and performing so-called feedback control.
図29は、組立台に乗った状態の振れ補正ユニット290を被写体側から見た分解斜視図であり、図29を用いて本実施例3に係る振れ補正ユニット290の要部について説明する。
FIG. 29 is an exploded perspective view of the
231はベース板(固定部材)、238は可動枠(可動部材)、232a,232b,232cはベース板231と可動枠238に狭持された球である。また、290は撮像素子206をフレキシブル基板(FPC)に半田付けした振れ補正ユニットである。233a,233bはコイル、234a,234bは磁石、235はヨーク(磁石吸着板)、236a,236bは吸着板固定ネジである。237a,237b,237cは弾性体、239a,239bはダンパーユニットである。247は組立台、248a,248bはダンパーユニット239a,239bのダンパー押え具である。
なお、図29では、振れ補正ユニット290の主要部分だけを示し、保持部材やリード線等は示していない。
In FIG. 29, only the main part of the
ここで、図26に示すような撮像装置201に本実施例3の振れ補正ユニット290を組み込む際には、ダンパー押え具247を外して組み込む。
Here, when the
図29を用いて、ベース板231と可動枠238の相対運動について説明する。撮像素子206は、ベース板231に対してX方向及びY方向に移動可能な可動枠238に固定されている。この可動枠236には不図示の突起部を設けられ、また、ベース板231には突起部231c,231dが設けられ、それぞれが回転規制板249の案内孔249a,249b,249c,249dに嵌合して取り付けられる。このことにより、光軸周りに回転すること無しに、X方向およびY方向に摺動可能な構成となっている。
The relative movement between the
上記のようにベース板231と可動枠238は球232a,232b,232cを狭持しており、球232a,232b,232cを介して相対運動を行う。このため、転がり摩擦という非常に小さな摩擦の影響しか受けずに相対運動を行うことができる。摩擦が小さいために非常に小さな入力に対しても適切に応答することが出来る。また、球232a,232b,232cによる案内面を適切な精度で製作することにより、ベース板231と可動枠238が相対運動を行った場合でも、可動枠238の傾きや光軸方向への不要な移動が発生することが無い。
As described above, the
ダンパー押え具248a,248b付きのダンパーユニット239a,239bの詳細図は、実施例1と同様なので割愛する。
Detailed views of the
また、組立フローチャートも、実施例1とほぼ同様であるので、ここでは割愛する。 Also, the assembly flowchart is almost the same as that of the first embodiment, and is omitted here.
上記の実施例3によれば、振れ補正ユニット290は、固定部材であるベース板231に取り付けられるダンパー保持枠(第1の取付部)244a,244bを有する。さらに、可動部材である可動枠238に取り付けられるダンパー抵抗棒(第2の取付部)246a,246bを有する。さらには、ダンパー保持枠244a,244bとダンパー抵抗棒246a,246bとの間を粘弾性支持する減衰手段245a,245bとをユニット化して成るダンパーユニット(ダンパー手段)239a,239bを有する。ダンパーユニット239a,239bは、補正手段である撮像素子206の移動方向の制動を行うものである。
According to the third embodiment, the
上記のようにダンパー手段であるダンパーユニット239a,239bをユニット化することで、量産安定性と組立安定性を向上させ、コストダウンを図ることが可能となる。また、簡単な構成のダンパーユニット239a,239bを備えることにより、画像振れ補正に適した粘性抵抗を得ることができる。
By unitizing the
その他の効果は、実施例1と同様である。 Other effects are the same as those of the first embodiment.
(本発明と実施例の対応)
実施例1において、補正光学系12が本発明の補正手段に、可動鏡筒38が補正手段を一体に保持する可動部材に、ベース板31が固定部材に、それぞれ相当する。また、円筒状のダンパー保持枠44a,44bと棒状のダンパー抵抗棒46a,46bが本発明の第1の取付部と第2の取付部の一方もしくは他方に相当する。また、減衰手段45a,45bが減衰手段に、ダンパーユニット39a,39bがダンパー手段に、それぞれ相当する。
(Correspondence between the present invention and the embodiment)
In the first embodiment, the correction
実施例2において、補正光学系120が本発明の補正手段に、可動鏡筒138が補正手段を一体に保持する可動部材に、ベース板131が固定部材に、それぞれ相当する。また、同筒円状のダンパー内枠146a,146bとその外側に同心円状に配置されるダンパー保持枠146a,146bが本発明の第1の取付部と第2の取付部の一方もしくは他方に相当する。また、第1の取付部と第2の取付部の間に具備され、これらを支持可能な粘弾性体により構成される減衰手段145a,145bが減衰手段に、ダンパーユニット139a,139bがダンパー手段に、それぞれ相当する。
In the second embodiment, the correction
実施例3において、撮像素子206が本発明の補正手段に、可動枠238が補正手段を一体に保持する可動部材に、ベース板231が固定部材に、それぞれ相当する。また、円筒状のダンパー保持枠244a,244bと棒状のダンパー抵抗棒246a,246bが本発明の第1の取付部と第2の取付部の一方もしくは他方に相当する。また、減衰手段245a,245bが減衰手段に、ダンパーユニット239a,239bがダンパー手段に、それぞれ相当する。
In the third embodiment, the
1 撮像装置
2 撮像レンズ
6 撮像素子
8 振れセンサ
9 振れ補正ユニット
12 補正光学系
31 ベース板
32a,32b,32c 球
33a,33b コイル
34a,34b 磁石
35 ヨーク
37a,37b,37c 弾性体
38 可動鏡筒
39a,39b ダンパーユニット
44a,44b ダンパー保持枠
45a,45b 減衰手段
46a,46b ダンパー抵抗棒
47 組立台
48a,48b ダンパー押え具
120 補正光学系
131 ベース板
132a,132b,132c 球
133a,133b コイル
134a,134b 磁石
135 ヨーク
137a,137b,137c 弾性体
138 可動鏡筒
139a,139b ダンパーユニット
144a,144b ダンパー保持枠
145a,145b 減衰手段
146a,146b ダンパー内枠
147 組立台
190 振れ補正ユニット
201 撮像装置
206 撮像素子
231 ベース板
232a,232b,232c 球
233a,233b コイル
234a,234b 磁石
235 ヨーク
237a,237b,237c 弾性体
238 可動枠
239a,239b ダンパーユニット
244a,244b ダンパー保持枠
245a,245b 減衰手段
246a,246b ダンパー抵抗棒
247 組立台
290 振れ補正ユニット
DESCRIPTION OF
Claims (8)
前記補正手段を一体に支持する可動部材と、
前記可動部材を移動可能に保持する固定部材とを有し、
前記可動部材を介して前記補正手段を撮像光学系の光軸と直交する平面内で移動させ、振れによる画像振れを補正する振れ補正装置において、
前記固定部材に取り付けられる第1の取付部と、前記可動部材に取り付けられる第2の取付部と、前記第1の取付部と前記第2の取付部との間を粘弾性支持する減衰手段とがユニット化されて成り、前記補正手段の移動方向の制動を行うダンパー手段を有することを特徴とする振れ補正装置。 Correction means for correcting image blur;
A movable member that integrally supports the correction means;
A fixed member that holds the movable member movably,
In a shake correction apparatus that corrects image shake due to shake by moving the correction means in a plane orthogonal to the optical axis of the imaging optical system via the movable member,
A first attachment portion attached to the fixed member; a second attachment portion attached to the movable member; and a damping means for supporting viscoelasticity between the first attachment portion and the second attachment portion. Is a unit, and has a damper means for braking in the moving direction of the correction means.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007130568A JP2008286929A (en) | 2007-05-16 | 2007-05-16 | Shake correction device and imaging apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007130568A JP2008286929A (en) | 2007-05-16 | 2007-05-16 | Shake correction device and imaging apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008286929A true JP2008286929A (en) | 2008-11-27 |
| JP2008286929A5 JP2008286929A5 (en) | 2010-06-17 |
Family
ID=40146728
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007130568A Pending JP2008286929A (en) | 2007-05-16 | 2007-05-16 | Shake correction device and imaging apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008286929A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011053241A (en) * | 2009-08-31 | 2011-03-17 | Canon Inc | Image stabilizing apparatus and image capturing apparatus |
| JP2011081381A (en) * | 2009-10-06 | 2011-04-21 | Hwa Hong Industrial Corp | Lens operating device, vibration proof elastic piece, and method of manufacturing the same |
| JP2014074828A (en) * | 2012-10-05 | 2014-04-24 | Canon Inc | Image blur correction device, and optical equipment using the same |
| JP2017021365A (en) * | 2016-09-14 | 2017-01-26 | ミツミ電機株式会社 | Lens drive device, camera module and camera |
| CN113473022A (en) * | 2015-03-19 | 2021-10-01 | Lg伊诺特有限公司 | Lens driving device, camera module and optical apparatus |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08321052A (en) * | 1995-05-22 | 1996-12-03 | Mitsumi Electric Co Ltd | Optical head actuator |
| JP2000307937A (en) * | 1999-04-22 | 2000-11-02 | Ricoh Co Ltd | Image pickup device |
| JP2005299915A (en) * | 2004-03-17 | 2005-10-27 | Tokai Rubber Ind Ltd | Vibration damping device |
| JP2006091215A (en) * | 2004-09-22 | 2006-04-06 | Fujinon Corp | Vibration-proof device |
| JP2007040468A (en) * | 2005-08-04 | 2007-02-15 | Matsushita Electric Ind Co Ltd | Shock absorption mechanism and mechanical device provided with its mechanism |
-
2007
- 2007-05-16 JP JP2007130568A patent/JP2008286929A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08321052A (en) * | 1995-05-22 | 1996-12-03 | Mitsumi Electric Co Ltd | Optical head actuator |
| JP2000307937A (en) * | 1999-04-22 | 2000-11-02 | Ricoh Co Ltd | Image pickup device |
| JP2005299915A (en) * | 2004-03-17 | 2005-10-27 | Tokai Rubber Ind Ltd | Vibration damping device |
| JP2006091215A (en) * | 2004-09-22 | 2006-04-06 | Fujinon Corp | Vibration-proof device |
| JP2007040468A (en) * | 2005-08-04 | 2007-02-15 | Matsushita Electric Ind Co Ltd | Shock absorption mechanism and mechanical device provided with its mechanism |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011053241A (en) * | 2009-08-31 | 2011-03-17 | Canon Inc | Image stabilizing apparatus and image capturing apparatus |
| JP2011081381A (en) * | 2009-10-06 | 2011-04-21 | Hwa Hong Industrial Corp | Lens operating device, vibration proof elastic piece, and method of manufacturing the same |
| JP2014074828A (en) * | 2012-10-05 | 2014-04-24 | Canon Inc | Image blur correction device, and optical equipment using the same |
| US9804407B2 (en) | 2012-10-05 | 2017-10-31 | Canon Kabushiki Kaisha | Image shake correction apparatus having exposed damping member and installation region of damping member overlapping with ball or sphere contact surface in an optical axis direction |
| CN113473022A (en) * | 2015-03-19 | 2021-10-01 | Lg伊诺特有限公司 | Lens driving device, camera module and optical apparatus |
| US11619801B2 (en) | 2015-03-19 | 2023-04-04 | Lg Innotek Co., Ltd. | Lens driving device, camera module and optical apparatus |
| US11803029B2 (en) | 2015-03-19 | 2023-10-31 | Lg Innotek Co., Ltd. | Lens driving device, camera module and optical apparatus |
| JP2017021365A (en) * | 2016-09-14 | 2017-01-26 | ミツミ電機株式会社 | Lens drive device, camera module and camera |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8319844B2 (en) | Lens driving device, image stabilizing unit, and image pickup apparatus | |
| JP5132295B2 (en) | Imaging apparatus and optical apparatus | |
| TWI457693B (en) | Optical image stabilizer | |
| CN107076960B (en) | Camera assembly | |
| JP5079836B2 (en) | Anti-shake structure of lens autofocus module | |
| TWI317455B (en) | A system for providing image stabilization in an image capture device and a method for performing image stabilization in an image capture device | |
| JP5453220B2 (en) | Anti-camera tilt correction structure of auto focus module | |
| JP5465500B2 (en) | Optical unit with shake correction function, and shake correction control method in optical unit with shake correction function | |
| US8369698B2 (en) | Image blur correction apparatus and camera | |
| KR101681366B1 (en) | Lens driving device and camera module including the same | |
| JP2010266789A (en) | Image blur correcting device and imaging apparatus | |
| TW201027231A (en) | Camera driving apparatus | |
| US8184167B2 (en) | Optical apparatus having magnet member | |
| JP5183098B2 (en) | Image blur correction apparatus, optical apparatus having the same, and imaging apparatus | |
| JP7086646B2 (en) | A stage device, and an image pickup device and a lens device provided with the stage device. | |
| KR101398470B1 (en) | Shake correction module for photographing apparatus and photographing apparatus having the same | |
| JP2008286929A (en) | Shake correction device and imaging apparatus | |
| TWI456253B (en) | Anti-shock tilt correction structure of auto focus module | |
| JP2014074828A (en) | Image blur correction device, and optical equipment using the same | |
| CN109426047A (en) | Driving equipment with the driving unit for using magnetic loop | |
| JP2010286810A (en) | Blur correction device and optical instrument | |
| JP7362310B2 (en) | Image stabilization device, imaging device | |
| JP2008281949A (en) | Blur correcting device and imaging apparatus | |
| JP2010128029A (en) | Blur correction device, lens barrel, and optical appliance | |
| JP5414821B2 (en) | Image blur correction apparatus, optical apparatus including the same, and imaging apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100430 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100430 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100520 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120312 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120522 |