JP2007505304A - 調査する目標物の方向の測定方法 - Google Patents
調査する目標物の方向の測定方法 Download PDFInfo
- Publication number
- JP2007505304A JP2007505304A JP2006525778A JP2006525778A JP2007505304A JP 2007505304 A JP2007505304 A JP 2007505304A JP 2006525778 A JP2006525778 A JP 2006525778A JP 2006525778 A JP2006525778 A JP 2006525778A JP 2007505304 A JP2007505304 A JP 2007505304A
- Authority
- JP
- Japan
- Prior art keywords
- target
- image
- pattern
- sensor
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000005259 measurement Methods 0.000 claims abstract description 76
- 230000036961 partial effect Effects 0.000 claims abstract description 17
- 238000000034 method Methods 0.000 claims description 29
- 238000005070 sampling Methods 0.000 claims description 18
- 238000001514 detection method Methods 0.000 claims description 6
- 230000001133 acceleration Effects 0.000 claims description 5
- 230000000007 visual effect Effects 0.000 claims description 4
- 230000000737 periodic effect Effects 0.000 claims description 2
- 238000012790 confirmation Methods 0.000 claims 1
- 238000009795 derivation Methods 0.000 claims 1
- 238000000691 measurement method Methods 0.000 claims 1
- 230000008859 change Effects 0.000 abstract description 6
- 238000010586 diagram Methods 0.000 description 11
- 230000003287 optical effect Effects 0.000 description 10
- 238000006243 chemical reaction Methods 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 7
- 230000009466 transformation Effects 0.000 description 7
- 238000005457 optimization Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 238000012937 correction Methods 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000001454 recorded image Methods 0.000 description 2
- 238000010187 selection method Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C1/00—Measuring angles
- G01C1/02—Theodolites
- G01C1/04—Theodolites combined with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/782—Systems for determining direction or deviation from predetermined direction
- G01S3/783—Systems for determining direction or deviation from predetermined direction using amplitude comparison of signals derived from static detectors or detector systems
- G01S3/784—Systems for determining direction or deviation from predetermined direction using amplitude comparison of signals derived from static detectors or detector systems using a mosaic of detectors
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Analysis (AREA)
Abstract
【課題】本発明は、目標物のパターン6の画像4を記録して、目標物への方向を測定する。
【解決手段】目標物の急速な位置変化に、測定の最適な安定性を実行するために、現在の画像センサの機能を用いて、得られるピクセルの一部のみを計算する。計算する画像情報の選択は、要求される測定精度および画像センサの時間動作に関する情報を使用する。本発明では、取得する情報の制限は、サブサンプリングとサブウィンドウの組合せを用いた画像4の一部領域7bの選択で実行できる。画像4の一部領域7aに表示される画像のピクセルの一部を省略する。
【選択図】図5
【解決手段】目標物の急速な位置変化に、測定の最適な安定性を実行するために、現在の画像センサの機能を用いて、得られるピクセルの一部のみを計算する。計算する画像情報の選択は、要求される測定精度および画像センサの時間動作に関する情報を使用する。本発明では、取得する情報の制限は、サブサンプリングとサブウィンドウの組合せを用いた画像4の一部領域7bの選択で実行できる。画像4の一部領域7aに表示される画像のピクセルの一部を省略する。
【選択図】図5
Description
本発明は、測定する目標物の方向を測定する方法、およびコンピュータプログラムおよびデータ信号に関する。
多くの測地の課題または応用で、測定地点から目標物地点の方向を測定する必要がある。例えば、方位角および別の基準点への仰角またはコンパス方位で、この課題は、古典的な測地の作業である。
測定する目標物地点または目標物を測定可能または調査可能とするために、目標物地点を空間で他の地点から区別する必要がある。例えば、目標物から能動的に放射線を放射させる。
目標物地点を区別する他の方法として、目標物での反射率を増加することである。例えば、地点またはその地点の所定近傍に1つ以上の反射体または反転中心を持つコーナーキューブを取付ける。
目標物地点を区別する他の例として、既知の目標物の形、例えば固定した目標体、または目標物の縁/角/中心/重心に対して位置を定める。
測定地点から、検出器の立体角成分または視野が、目標物地点を含み、センサで検出および記録されて、測定が可能となる。目標物地点が、測定する立体角成分内にある場合、画像がセンサ上でパターンとなり目標物地点の区別となる。目標物固有のパターンが、所定の方位または位置で、方向依存性を有し検出器上に焦点が合わされる。センサでのパターンの位置で、検出地点に対する目標物地点の方向の計算を行う。必要に応じて付加的な情報を含むことが可能である。
方向測定に使用される画像の例として、目標物地点の焦点画像および位置感度検出器(PSD)または画像センサ上の所定の領域である。検出器またはセンサは、対物レンズまたは回折光学系を使用する。別の方法に無限焦点画像がある。これは、センサ上の方向依存の位置を、受け取った目標物の光線に直接指定する。この例では、目標物地点で放射される発散放射線をセンサ上に焦点を合わせて、円対称を持つパターンを形成する。
パターンの位置は、センサまたは計算機で測定し、検出地点に対する目標物地点の求める方向に変換する。必要に応じて、目標物の性質、目標物の距離および検出器の性質の付加的な情報を使用することが出来る。
位置測定をする適切なセンサとして、個別センサとして位置感度検出器(PSD)を、または個別センサのマトリックスとしての画像センサ、いわゆるピクセルまたは像点、を使用することが出来る。後者には利点がある。面倒な迷光が、個別のセンサまたは画像センサのピクセルに分配される。センサのダイナミクスおよび信号/バックグランド比の使用は、ただ1つの個別センサの使用よりも利点が多い。
しかし、画像センサを利用する不利な点は、単一の個別センサの使用と比較して、ピクセルの読み出しそして計算に著しい時間を要する。例えば、640(480ピクセルのVGA画像センサは、個別センサの使用に比べて307,200倍の時間を必要とする。
目標物または目標物地点の方向測定に、2次元センサを使用すると、センサ信号の読み取りおよび処理に時間が増加する問題がある。増加する時間は、干渉する放射線に対する安定性の利点がある。従って比較的に低い測定頻度の方向測定となる。
方向測定は、利用により、2つの問題に分割できる。
静的な測定作業−目標物地点が動かない、又は、検出器に対して方向測定の要求精度および測定頻度に対して、無視できる方向変化を備えているものである。
動的な測定作業−目標物地点から検出器までの方向の変化が無視できない時。動的な測定作業で生ずる問題は、測定の計算中に目標物への方向の変化が大きすぎる場合である。この場合、目標物地点が、次の測定中に検出器の視野外となる。複数の測定が互いに続く場合、目標物地点から検出器の方向が、測定中に変化する。例えば、目標物地点のランダムまたは不本意な動きによる。このような変化は、繰り返されることもあり、方向測定に問題を引き起こす。特に、目標物地点が、検出器の視野から外れる場合である。
この場合、視野のトラッキング、自動的に行っても目標体のトラッキングは、更に難しくなる。好ましくない状況では、方向測定および目標物地点を検出する目的に基づくトラッキングは、実行できなくなる。この場合、測定を停止することになる。
従って、方向に急激な変化がある方向測定の安定性の最適化は利点がある。しかし方向測定の所定の精度に達する必要がある。
特別な方向測定の場合、検出器の視野角以上の測定精度を必要とする。測定作業は、目標物地点がセンサの視野角内に在るのを判定または確認することからなる。これは目標物地点のトラッキングで十分である。
高い測定頻度は、必要に応じて、方向の急速な変化に高い規制の許容範囲が必要である。従って、この特別なケースに適している。
高い測定頻度は、静的な測定作業の場合にも適している。迅速な測定の場合、適用する時間内で複数の個別測定が得られて、測定精度が上げられる。さらに短くて強い妨害が、空気の乱流で測定中に発生する。これは迅速な測定で防げる。
本発明の目的は、方向の変化に対して方向測定を安定化し、要求される測定精度を維持する方法を提供する。
本発明の更なる目的は、方向測定に基づくトラッキングを可能とする。測定する目標物が、比較的に高い角速度または角加速度を備えている場合である。
これらの目的は、請求項1または従属項の特徴で実施または展開できる。
本発明は、目標物地点の方向を測定する方法に関する。画像センサまたは個別センサの列は、迷光に対して安定しているため使用する。
特殊な画像センサの場合、例えばCMOS画像センサは、個別の像点またはピクセルに直接アクセスが可能となる。このような画像センサは、計算されたセンサの画像領域を制限(例えば正方形)することが出来る。いわゆる、「サブウィンドウ」である。読み出すピクセル数の減少に伴い、ピクセルデータの読み出しおよび処理時間の短縮となる。
次に、このようなセンサでは、タイムゲインが可能となる。いわゆる「サブサンプリング」である。これは例えば、画像センサの配置で、2列目毎(3列目毎、4列目毎)だけの及び/又は2行目毎(3行目毎、4行目毎)だけの読み出しである。
本発明では、方向の変化に対する方向測定の安定性の最適化は、「サブサンプリング」および「サブウィンドウ」の組合せの選択で実行される。最適化は、要求される測定精度およびセンサのタイミングの基準に基づく。この目的のために、要求される測定精度および画像センサの時間動作の情報が使用される。最適化は、1つ以上の二次的な条件の指定、例えば測定頻度の制限で実行される。
サブサンプリングとサブウィンドウを組合わせて、ある量のピクセルを、検出器で検出された画像の一部領域内で選択する。その一部領域の外側のピクセルは考慮しない。一部領域を選択するパラメータ及びその一部領域内のピクセルを選択するパラメータを最適化する。一方、必要な測定精度は維持する。
本発明の方法は、純粋なサブウィンドウまたは純粋なサブサンプリング以上の利点を備えている。これは、時間の関数でのサブウィンドウの最適化、すなわち高い測定頻度を実行するのは、検出の領域を最大限に減らすことを意味する。ところが、全体の検出領域の計算のため、純粋なサブサンプリングは、評価するピクセル最小数に関して、本発明による方法より実質的に大きくなる。その結果、同じ測定精度の低い測定頻度または同じ測定頻度で低い測定精度となる。
以下、N番目毎の列(またはN番目毎の行)の読み出しを、N層列サブサンプリング(N層行サブサンプリング)と呼ぶ。
どちらの場合も、画像センサで記録される画像情報の部分のみが使用される。最も簡単な場合、内容が読み出されるピクセルの部分の選択からなる。しかし複数のピクセルの集合体、例えば、ピクセルの上部構造を与える組合わせを形成するのも可能である。
実際の方向測定の上流のステップで、画像記録および画像計算の条件またはパラメータを確立する。目標物のサイズ、距離および/または所望の測定精度に基づき、列サブサンプリングおよび行サブサンプリングで、どれで実行、又は、それを実行するかどうかを決定する。パターン位置、これは目標物地点の方向の計算をするものであるが、サブサンプリングで十分に精度良く測定される。これは、焦点が合った画像のパターンが、複雑な目標物地点の状況で形成されている時である。センサの測定マークの画像位置を十分に正確に抽出する。ただし画像が、マーキングの複雑さに依存する比較的多数のピクセル数を含む場合に限る。簡単なパターンの測定精度の評価の例を以下に記載する。記載は、センサの行方向のみにしている。列方向の場合の処理は、同様に実行される。
パターンは、センサNTの水平(行)方向で認識される位置を含んでいる。これらは、典型的に明−暗または暗−明の変化である。認識される位置は、パターンの縁に位置する、すなわちパターンの模様の部分ではない。
目標物のサイズおよび距離から、センサ上のサイズまたはパターンの計算が出来る。認識できるパターンの位置が、ピクセルのグリッドに向いていない場合、実際の応用での制限にはならないが、パターンの縁のピクセル数を予測して、NTを決める。パターンの位置測定エラーEPには次の比例関係が成立する。ここでGは、2つのピクセル間のインセンシティブギャップ(insensitive gap)である。この目的のために信号ノイズから来るエラーを考慮する必要がある。
サプサンプリング無しで、Gは、隣接するピクセルの感度ある領域間の距離である。フィリング係数がG>0で1より小さい。サブサンプリングの場合、読み出されないまたは読み出されるピクセル間にあるピクセル領域を、このピクセルのスペーシングに加える。サブサンプリングは、NTを減少させる。
式(1)の比例係数は、理論的に導くまたは簡単なパターンの測定の基準に基づき求めることが出来る。
N層サブサンプリングは、最大Nで決める。このNは、方向測定の所望の測定精度を確定する。
サブウィンドウの理想的な選択は、以前選択したサブサンプリングを考慮する必要がある。最適化にパターンのサイズを含むと利点がある。目標物の距離からそのサイズを推定できる。
視野サイズを調整する。これにより、二つの方向測定間で生ずる目標物地点の最大角加速度を許容できるようにする。すなわち視野サイズが選択できる。これは、角加速度に関わらず、目標物地点が、なおも第二の測定中の検出器の視野に位置する。
「測地調査」または「測地利用」とは、空間基準を備えるデータの測定または検査を含む測定を意図している。測地装置または測地デバイスの使用に関わる全ての適用も意図している。これは、特にセオドライトおよびトータルステーションに適用する。つまり電子式角度測定器および電気光学式テレメータなどのスタジア測量器である。本発明は、特殊な応用に利用可能である。軍事目的の領域または工業の構造、プロセス、機械の位置、ガイダンスのモニタである。
以下に、模式的に示す図を参照しながら、本発明の方法を詳細に説明する。
図1は、本発明による調査の方法の可能な使用を示す。測地測定装置1のトータルステーションで、建築現場で基準地点を探す。測量スタッフに認識できる目標物2として反射体を備える基準地点を、建築現場で調査する。測定装置1に一体化した画像センサ1aは、センサ視野3を備えている。目標物2は、この視野内に存在する。この目標物2の方向を測定する。この図では、センサの視野3は、例として長方形であるが、他の形でも良い。
図2は、画像センサによるパターン6を持つ画像4の記録のダイアグラムである。画像センサが記録する画像4は、調査する目標物2を登録している。この画像4は、ピクセルの配列5によるセンサで記録され、電子的に計算される信号に変換される。配列5上のパターン6は、調査する目標物2に対応する。パターン6及びそれに関連するピクセルは、明から暗への変化の基準で識別される。しかし配列5の全てのピクセル5aの読出しには所定の時間を要する。この時間が、画像処理の可能な頻度を決める。目標物2の方向測定には、画像4または配列5でのパターン6の方位を十分知る必要がある。これにより、配列5の全てのピクセル5aを必要としない。CCDカメラの場合、完全な読み出しがいつも実行される。他の設計、例えばCMOSカメラの場合、個別のピクセル5aを選択的に読み出すことが出来る。方向測定に要求される画像内容を調整する使用が実現できる。
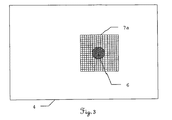
図3は、サブウィンドウによる画像情報の選択のダイアグラムである。画像4で検出される目標物のパターン6が、画像センサの密接するピクセル部分で記録される。この部分が画像4の一部領域7aとしての窓を確定する。センサの視野で確定する画像の一部のみで計算される。一部領域7aにある全てのピクセルで計算を行う。使用するピクセルの縮小は、記録の途中では、ハードウェア手段に基づき、記録するピクセルの部分のみを使用することにより、または、パターンの位置の測定において、原理的に可能な画像情報部分のみを読み出すことにより実行される。
図4は、サブサンプリングによる画像情報の選択のダイアグラムを示す。ここではピクセル5aを、所定の配列により使用から取り除いている。ピクセル5bの部分の内容のみが使用される。この例では、各行の1つおきのピクセル5bが使用される。1つおきの行の内容は、全く無視している。使用されるピクセル5bは、行ごとに互いにオフセットしている。画像4に検出される目標物のパターン6は、画像センサのピクセル5bの部分で記録される。この部分は、センサの視野で確定される全体の画像4をカバーする。得られるピクセル5aを完全に使用していない。全てのピクセル5aを使用する場合と比較して、これは粗いグリッドの記録で、縮小したフィリング係数を備える画像センサに対応する。図示するピクセル5aの選択は、一例に過ぎない。本発明によれば、更に広い配列が使用できる。特に、行毎のオフセット無し(列および/または行のサブサンプリング)の選択方法で使用でき、または非周期の順または集合体の選択方法も使用できる。
図5は、本発明によるサブウィンドウとサブサンプリングの組合わせによる画像情報の選択を示す。この場合、図3および図4に示す手法を組合わせている。画像4の一部領域7bのみを、パターン6の位置測定に使用する。この一部領域7bには、全てのピクセルを使用しないで、ピクセルの選択を配列に対して行う。この画像情報の選択は、2段階のアプローチからなる。第一に、画像の一部領域7bだけを使用する。第二として、この領域内の全てのピクセルを使用しない。本発明によれば、サブウィンドウおよびサブサンプリングの他の組合わせも可能である。特に、異なる内部選択を備えた複数の一部領域の使用も可能である。これら部分領域が重なっていても良い。
図6は、センサの最適画像の分解能の計算を説明する。センサは、図2〜5に示す正方形のピクセルおよび両方のセンサ方向に同じ速度要求を備えている。この手順は、長方形のピクセルおよび/または異なる速度要求を包括的に含むことが出来る。
画像分解能をNP(NPピクセルとする。方向測定の必要時間TMは、係数Cnの2次多項式で決まる。
パターン6は、NP(NPピクセルを備えたセンサ領域にある。この例では、パターンの範囲は半径RMの円としている。測定作業で連続した方向測定を確保したい場合、パターン6が、測定時間TM中に、感度の有る領域から離れることを禁止している。従って、センサ上のパターン6の最大速度は、(数3)で与えられる。最適なサブウィンドウは、速度を最大化して(数4)で与えられる。

画像分解能NP,Opt(NP,Optを選択すると、連続測定するセンサにパターンの最大限の速度を与える。パターン6が測定中にセンサ上を距離D移動した場合、測定は、パターン6の初期の中心の方位で尚も実行可能である。検出器の視野を次の測定の調整前に行なう。NP,Optの値が、センサ方向のピクセル数を越す場合、つまりNP,Opt(その行のピクセル数、可能なサブサンプリングを考慮して、センサをサブウィンドウ無しでこの方向に調整する。この例では、可能な行のサブサンプリングを与える行、可能な列のサブサンプリングを与える全てのピクセルを計算している。これは、C2=0の場合の手順でもある。
使用する領域の連続した調整のみを実行する場合、パターン6の位置を比較的粗く測定するのも可能である。許容できる測定エラーが、検出器の視野の半分に相当する場合である。ただし、パターンの中心が、センサの視野内に位置する場合に限る。パターン6の一部領域のみが、計算するセンサ領域に有ることを意味する。この場合、センサ上のパターン6の可能な最大速度は、(数5)で与えられる。従って、計算される画像領域の最適な分解能NP,Opt(NP,Optは、(数6)となる。
センサ方向で、NP,Optが、計算するピクセル数よりも多い場合、サブサンプリングを考慮して、全てのピクセルを計算する。C2=0の場合、同様のことが、2つのセンサ方向に該当する。
次の図で、画像センサ上のパターンの位置から所望の方向情報の計算を説明する。
図7は、パターンの地点qの画像座標を目標物地点Qの検出目標物の極角に変換する変換モデルを示す。この変換モデルで、目標物地点の位置または方向を、パターンの位置から得ることが原理的に可能である。
センサの視野内の任意の目標物地点Qの極角を、画像センサで検出されるパターンまたは画像4の位置の基準に基づいて、すなわち、画像座標の基準に基づいて決めるために、パターンとしてセンサの視野内に有る目標物またはパターンの対応点qの目標物地点Qの画像化の数学的記述を知る必要がある。画像座標系x,y,zの点を目標物座標系X,Y,Zへの変換を図7を参照して説明する。Z軸は、天頂方向を指示し、測地測定装置の垂直軸を表し、X軸は、傾斜軸となる。
限られた精度を備える簡単な変換が、次の仮定で可能となる。軸のシステムおよび基本設計が、セオドライトに対応する測地装置を出発点として使用する。
・ 画像センサ上の視野内に検出された目標物焦点の投影中心81が、
垂直軸と傾斜軸の交差する点である。
・ 傾斜軸は、垂直軸に直角である。
・ 光軸82およびセオドライトの軸83は、投影中心81で交差する。
・ 画像センサ上の視野内に検出された目標物焦点の投影中心81が、
垂直軸と傾斜軸の交差する点である。
・ 傾斜軸は、垂直軸に直角である。
・ 光軸82およびセオドライトの軸83は、投影中心81で交差する。
光軸82は、光学ユニットを通る軸で定める。従って実質的には、その軸はレンズの中心を通る。セオドライト軸83は、垂直軸および傾斜軸での回転角度に対する軸として定める。この意味は、セオドライト軸83と2つの方位測定地点の場合の画像センサとの交差する点が、調査する目標物の目標物地点Qになる。これが光学セオドライトの十字線に対して照準軸に対応する。
しかし、この仮定から開始する必要は無く、変換を適宜拡張しても良い。例えば、軸のエラー、特に軸のオフセットまたは軸のスキューを変換に含めても良い。これはさらに変換精度を高め、最高の精度クラスの測地測定装置に適している。
計算は、上の座標系の目標物地点Qの焦点に限定される。その座標系は、水平で、原点は投影中心81で、画像4の画像面に焦点を合わせる。任意の座標系への変換は、既知のヘルマート(Helmert)変換でスケール1の変移および回転で実行される。
記録された画像座標の目標物座標への変換の変換モデルは、次の式で与えられる。
ここで、
rQ 座標系(X,Y,Z)の点Qの目標物のベクトル84、
rq パターンの点qのベクトル、すなわち画像4の目標物地点Qの
コピーで、画像座標系x,y,zで測定されている。
xおよびy成分は、記録画像座標9で決める。
z成分は、チャンバ定数cに対応する。
この定数は、投影中心81から画像センサ、
つまり画像4の距離として定める。
チャンバ定数は、光学ユニットの集束レンズの位置、
すなわち焦点を合わせた目標物の距離で変化する。
rP 画像の原点ベクトルで、光軸82と画像面4の交差する点を記述する。
m 画像スケール。
RInc 回転マトリクスで、傾斜させたセオドライト面および水平面に関連する。
THz,V 変換マトリクスで、水平角度H、垂直角度Vおよび軸エラーの訂正に
基づいてセオドライト軸83の方向を記述する。
T0 光学歪をモデルするマトリクス。
rQ 座標系(X,Y,Z)の点Qの目標物のベクトル84、
rq パターンの点qのベクトル、すなわち画像4の目標物地点Qの
コピーで、画像座標系x,y,zで測定されている。
xおよびy成分は、記録画像座標9で決める。
z成分は、チャンバ定数cに対応する。
この定数は、投影中心81から画像センサ、
つまり画像4の距離として定める。
チャンバ定数は、光学ユニットの集束レンズの位置、
すなわち焦点を合わせた目標物の距離で変化する。
rP 画像の原点ベクトルで、光軸82と画像面4の交差する点を記述する。
m 画像スケール。
RInc 回転マトリクスで、傾斜させたセオドライト面および水平面に関連する。
THz,V 変換マトリクスで、水平角度H、垂直角度Vおよび軸エラーの訂正に
基づいてセオドライト軸83の方向を記述する。
T0 光学歪をモデルするマトリクス。
図7は、上位座標系X,Y,Zから画像座標系x,y,zへの目標物地点rQの変換を示す。測定した傾斜の角度、水平角度H、垂直角度Vおよび軸補正により、目標物地点ベクトルrQを画像センサの系に写像することが可能となる。光軸82のセオドライト軸83からの偏りおよび光学歪を、適切な変換と校正で補正する。
BrownまたはBayerに帰属する従来技術である写真測量法が適している。狭い角度系の場合、補正は、簡単にアフィン変換で表せる。
画像センサのパターンの位置を、方向情報に変換する他の例は、無限焦点配置である。ここで画像センサは、対物レンズの焦点面に取り付ける。十分に小さい広がりのビームを目標物地点から放射させると、それから生ずるパターン、多くは円形の位置が、対物レンズの第1の主点に対する方向に直接対応する。
図における方法の工程、建造物、および装置は、純粋に模式的に示したものである。ダイアグラムから、画像記録または画像処理の関係または詳細を導くものではない。ピクセルで例として示す点は、画像センサ内で、さらに複雑な構造または多数のピクセルも意味している。
Claims (11)
- 調査する目標物2の方向の測定方法で、
測地測定装置1が、
画像センサ1aと、調査する目標物2の少なくとも一部を検出する画像センサの視野3と、を備え、
測定方法が、
画像センサ1aで画像情報を有する画像4を記録する、
画像4は、目標物2に関連するパターン6を備え、画像4内のパターンの位置で、目標物2の方向の測定をする、
画像4内のパターン6の位置を測定する、
パターン6の位置から目標物2に関連する方向情報を得る、
画像センサ1aに関連する検出地点から目標物2への方向を測定する、
画像情報の一部のみを方向測定に選択および使用する、
ステップからなる方法において、
画像情報の一部が、所定の測定精度に関して最適化する方法で選択される、ことを特徴とする方法。 - ピクセルの周期的な省略において、パターン6の位置の局所的な分解能が、所定の測定精度で目標物2の方向の測定が出来るように周期が選択される、ことを特徴とする請求項1記載の方法。
- 画像4の記録の時に、サブウィンドウが、画像センサ1aの一部領域7bの選択に実行され、サブサンプリングが、一部領域7b内の特定のピクセル5aの省略として実行される、ことを特徴とする請求項1または2記載の方法。
- 方向情報の導出で、目標物2がセンサの視野3内に少なくとも一部位置することを確かめる確認が実行される、ことを特徴とする請求項1〜3のいずれか1項記載の方法。
- サブサンプリングのパラメータの指定は、サブウィンドウのパラメータの指定前に実行される、ことを特徴とする請求項1〜4のいずれか1項記載の方法。
- サブウィンドウの場合、一部領域7bの選択は、次の変数−目標物のサイズ、目標物の距離、所望の測定精度、パターン6の大きさ、予測されるまたは測定する最大角加速度−
の少なくとも1つを基準にして行なわれる、ことを特徴とする請求項1〜5のいずれか1項記載の方法。 - サブサンプリングの場合、省略するピクセル5aの選択は、次の変数−目標物のサイズ、目標物の距離、所望の測定精度、パターン6の大きさ、予測されるまたは測定する最大角加速度−の少なくとも1つを基準にして行なわれる、ことを特徴とする請求項1〜6のいずれか1項記載の方法。
- サブサンプリングの場合、画像センサ1aの列および/または行を、特に画像センサ1aの一部長方形の領域7bで省略する、ことを特徴とする請求項1〜7のいずれか1項記載の方法。
- サブサンプリングの場合、ピクセル5aを規則的または確率的な順で省略する、ことを特徴とする請求項1〜8のいずれか1項記載の方法。
- プログラムコードを備えたコンピュータプログラムで、プログラムコードが機械的読出し可能な媒体に蓄積され、請求項1〜9のいずれか1項記載の方法を実行するためのプログラム。
- アナログまたはデジタルコンピュータのデータ信号で、信号は、電磁波で具現され、請求項1〜9のいずれか1項記載の方法を実行するプログラムコードのセグメントを備えたデータ信号。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP03020734A EP1515152A1 (de) | 2003-09-12 | 2003-09-12 | Verfahren zur Richtungsbestimmung zu einem zu vermessenden Objekt |
| PCT/EP2004/010157 WO2005026767A1 (de) | 2003-09-12 | 2004-09-10 | Verfahren zur richtungsbestimmung zu einem zu vermessenden objekt |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007505304A true JP2007505304A (ja) | 2007-03-08 |
| JP2007505304A5 JP2007505304A5 (ja) | 2007-10-11 |
Family
ID=34130195
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006525778A Withdrawn JP2007505304A (ja) | 2003-09-12 | 2004-09-10 | 調査する目標物の方向の測定方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US7842911B2 (ja) |
| EP (2) | EP1515152A1 (ja) |
| JP (1) | JP2007505304A (ja) |
| CN (1) | CN1849524B (ja) |
| AT (1) | ATE438867T1 (ja) |
| AU (1) | AU2004272727B2 (ja) |
| CA (1) | CA2538728C (ja) |
| DE (1) | DE502004009863D1 (ja) |
| WO (1) | WO2005026767A1 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7908752B2 (en) * | 2006-12-27 | 2011-03-22 | Trimble Ab | Geodetic instrument and related method |
| JP5450089B2 (ja) * | 2008-08-08 | 2014-03-26 | パナソニック株式会社 | 対象検出装置および対象検出方法 |
| EP2338062B1 (de) * | 2008-10-15 | 2017-11-29 | Siemens AG Österreich | Verfahren und system zur ermittlung einer fahrzeuggeschwindigkeit |
| EP2405236B1 (de) | 2010-07-07 | 2012-10-31 | Leica Geosystems AG | Geodätisches Vermessungsgerät mit automatischer hochpräziser Zielpunkt-Anzielfunktionalität |
| EP2543960A1 (de) | 2011-07-05 | 2013-01-09 | Hexagon Technology Center GmbH | Verfahren zum Bereitstellen von Zielpunktkandidaten zur Auswahl eines Zielpunkts |
| EP2557391A1 (de) * | 2011-08-12 | 2013-02-13 | Leica Geosystems AG | Messgerät zur Bestimmung der räumlichen Lage eines Messhilfsinstruments |
| US9222771B2 (en) | 2011-10-17 | 2015-12-29 | Kla-Tencor Corp. | Acquisition of information for a construction site |
| DE102012217282B4 (de) * | 2012-09-25 | 2023-03-02 | Trimble Jena Gmbh | Verfahren und Vorrichtung zur Zuordnung von Messpunkten zu einem Satz von Festpunkten |
| US20140267772A1 (en) * | 2013-03-15 | 2014-09-18 | Novatel Inc. | Robotic total station with image-based target re-acquisition |
| EP2835613B1 (de) | 2013-08-08 | 2019-01-16 | Hexagon Technology Center GmbH | Geodätisches Vermessungsgerät mit Mikrolinsenarray |
| CN104848852B (zh) * | 2015-06-10 | 2017-08-25 | 刘述亮 | 一种环形传感阵列的定位系统和方法 |
| JP6966184B2 (ja) * | 2016-06-15 | 2021-11-10 | 株式会社トプコン | 測量システム |
| CN108955626A (zh) * | 2018-04-24 | 2018-12-07 | 西安电子科技大学 | 亚微米量级的高精度探测系统及位置角度探测方法 |
| US20200090501A1 (en) * | 2018-09-19 | 2020-03-19 | International Business Machines Corporation | Accident avoidance system for pedestrians |
| EP3640678B1 (en) * | 2018-10-17 | 2022-11-09 | Trimble Jena GmbH | Tracker, surveying apparatus and method for tracking a target |
| EP3640590B1 (en) | 2018-10-17 | 2021-12-01 | Trimble Jena GmbH | Surveying apparatus for surveying an object |
| EP3640677B1 (en) | 2018-10-17 | 2023-08-02 | Trimble Jena GmbH | Tracker of a surveying apparatus for tracking a target |
| EP3696498A1 (en) | 2019-02-15 | 2020-08-19 | Trimble Jena GmbH | Surveying instrument and method of calibrating a survey instrument |
| CN109978055B (zh) * | 2019-03-26 | 2021-04-23 | 京东方科技集团股份有限公司 | 多传感器系统的信息融合方法及系统、计算机设备及介质 |
| US20210004591A1 (en) * | 2019-09-14 | 2021-01-07 | Ron Zass | Sequence of events monitoring in construction sites |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9019538D0 (en) * | 1990-09-07 | 1990-10-24 | Philips Electronic Associated | Tracking a moving object |
| JP3621123B2 (ja) * | 1993-12-28 | 2005-02-16 | 株式会社トプコン | 測量機 |
| EP1094671A1 (en) * | 1999-10-19 | 2001-04-25 | Deutsche Thomson-Brandt Gmbh | Method of motion estimation for a digital input video signal |
| IL141650A (en) * | 2001-02-26 | 2005-12-18 | Elop Electrooptics Ind Ltd | Method and system for tracking an object |
| EP1460377A3 (de) * | 2003-03-21 | 2004-09-29 | Leica Geosystems AG | Verfahren und Vorrichtung zur Bildverarbeitung in einem geodätischen Messgerät |
-
2003
- 2003-09-12 EP EP03020734A patent/EP1515152A1/de not_active Withdrawn
-
2004
- 2004-09-10 JP JP2006525778A patent/JP2007505304A/ja not_active Withdrawn
- 2004-09-10 DE DE502004009863T patent/DE502004009863D1/de not_active Expired - Lifetime
- 2004-09-10 AU AU2004272727A patent/AU2004272727B2/en not_active Ceased
- 2004-09-10 EP EP04765082A patent/EP1687656B1/de not_active Expired - Lifetime
- 2004-09-10 WO PCT/EP2004/010157 patent/WO2005026767A1/de active Application Filing
- 2004-09-10 CN CN200480026103XA patent/CN1849524B/zh not_active Expired - Fee Related
- 2004-09-10 US US10/571,208 patent/US7842911B2/en active Active
- 2004-09-10 CA CA2538728A patent/CA2538728C/en not_active Expired - Fee Related
- 2004-09-10 AT AT04765082T patent/ATE438867T1/de not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| CA2538728C (en) | 2012-05-15 |
| US7842911B2 (en) | 2010-11-30 |
| CN1849524B (zh) | 2010-07-21 |
| AU2004272727B2 (en) | 2009-09-10 |
| CN1849524A (zh) | 2006-10-18 |
| EP1515152A1 (de) | 2005-03-16 |
| US20080116354A1 (en) | 2008-05-22 |
| DE502004009863D1 (de) | 2009-09-17 |
| EP1687656A1 (de) | 2006-08-09 |
| WO2005026767A1 (de) | 2005-03-24 |
| EP1687656B1 (de) | 2009-08-05 |
| CA2538728A1 (en) | 2005-03-24 |
| AU2004272727A1 (en) | 2005-03-24 |
| ATE438867T1 (de) | 2009-08-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007505304A (ja) | 調査する目標物の方向の測定方法 | |
| CA2834189C (en) | Calibration method for a device having a scan function | |
| JP5192822B2 (ja) | 少なくとも1つの標的の測量方法及びその測地装置 | |
| US7623224B2 (en) | Calibration of a surveying instrument | |
| US6031606A (en) | Process and device for rapid detection of the position of a target marking | |
| JP3494075B2 (ja) | 移動体の自己位置標定装置 | |
| JP2006520891A (ja) | 測量機器において画像処理を行う方法と装置 | |
| JP5355443B2 (ja) | 位置補正システム | |
| US9052159B2 (en) | System for determining the spatial orientation of a movable apparatus | |
| KR101281627B1 (ko) | 적외선 영상 탐색기의 축을 정렬하기 위한 장치 및 그 방법 | |
| CN110044334B (zh) | 基于维诺图的室内空间定位 | |
| US10191163B2 (en) | Method for the absolute calibration of the location and orientation of large-format detectors using laser radar | |
| US20240334054A1 (en) | System and method for stabilizing imaging sensor data | |
| CN117255181A (zh) | 一种基于投影面积的投影图像矫正方法 | |
| CN118962589A (zh) | 分布式多红外传感器协同引导搜索与目标同一性判定方法 | |
| JP2022054848A (ja) | 追尾方法及びレーザスキャナ及び追尾プログラム | |
| Walczykowski et al. | NUMERICAL ANALYSIS OF WHISKBROOM TYPE SCANNER IMAGES FOR ASSESSMENT OF OPEN SKIES TEST FLIGHTS | |
| JPH1026527A (ja) | 測距の方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070823 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070823 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090807 |