JP2007068708A - 医療装置 - Google Patents
医療装置 Download PDFInfo
- Publication number
- JP2007068708A JP2007068708A JP2005257967A JP2005257967A JP2007068708A JP 2007068708 A JP2007068708 A JP 2007068708A JP 2005257967 A JP2005257967 A JP 2005257967A JP 2005257967 A JP2005257967 A JP 2005257967A JP 2007068708 A JP2007068708 A JP 2007068708A
- Authority
- JP
- Japan
- Prior art keywords
- tube
- medical device
- arm
- holding member
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/508—Supports for surgical instruments, e.g. articulated arms with releasable brake mechanisms
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Endoscopes (AREA)
Abstract
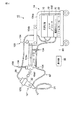
【解決手段】医療装置10は、基部32と、この基部32から延出されたユニバーサルケーブルと、基部32からユニバーサルケーブル36とは異なる位置から延出されたチューブ82とを有する内視鏡12を支持するものである。この医療装置10は、基部32を回動可能に支持するアーム104と、ユニバーサルケーブル36を基部32の回動に応じて移動可能に配する第1および第2の支持部106,108の一方のバンドルリテナ134と、チューブ82を基部の回動に応じて移動可能に配する第1および第2の支持部106,108の他方のバンドルリテナ134とを備えている。
【選択図】図1
Description
第1の軟性体と第2の軟性体とを、それぞれ別の第1の保持部材と第2の保持部材とに分けて配したので、医療器具本体を例えば第1の軟性体の軸回りに回動させる際に、回動または回転させ易い状態を極力維持することが可能である。
このため、第1および第2の軟性体を、第1の保持部材および第2の保持部材でそれぞれ進退させつつ保持することができる。
このため、第1および第2の軟性体を、第1の保持部材および第2の保持部材でそれぞれ回動させつつ保持することができる。
このため、第1および第2の軟性体に加えられる回動力を低下させるように、支持機構を作用させることができる。
このため、第1および第2の軟性体の軸方向の流れを、互いの干渉を防止した状態に保つことができる。
このため、第1および第2の軟性体の軸方向の流れを、互いの干渉を防止した状態に保つことができる。
図1および図2に示すように、この実施の形態に係る医療装置10は、電動湾曲内視鏡(医療器具)12と、支持装置14と、光源装置16と、ビデオプロセッサ18と、電磁弁ユニット20と、システムコントローラ22とを備えている。電動湾曲内視鏡12は、体腔内の観察機能および処置機能を備えている。支持装置14は、電動湾曲内視鏡12を所定の範囲内で移動自在に支持するものである。光源装置16は、後述する挿入部34の先端部の前面から出射する照明光束を供給するものである。ビデオプロセッサ18は、後述する撮像ユニット42からの映像信号を受けて所定の信号処理を施すものである。電磁弁ユニット20は、挿入部34の内部に設けられる後述する送気送水管路52や吸引管路54等を介して送気送水および吸引動作の制御を行なうものである。システムコントローラ22は、光源装置16、ビデオプロセッサ18および電磁弁ユニット20に電気的に接続されている。このため、システムコントローラ22は、後述する湾曲駆動機構44の駆動制御を行なうとともに、光源装置16やビデオプロセッサ18や電磁弁ユニット20を統括的に制御することができる。
電気モータ62は、回転による駆動力を生じさせる。モータ制御部64は、電気モータ62を含む湾曲駆動機構44の統括的な制御を行なう。エンコーダ66は、電気モータ62の駆動軸の回転速度や回転量等の動作状態をデータ化する。減速ギヤ68は、電気モータ62の駆動軸の回転動力を減速させる。
図3(A)に示すように、ベース部122は、第3のアーム104cの一端の上面の平坦面にネジ142により固定されている。図3(B)に示すように、このベース部122は、有底円筒状に形成され、ネジ144によって、シャフト124の基端部(ここでは下端部)に固定されている。
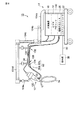
図2に示す内視鏡12の挿入部34の先端部を体腔内の導管等の所望の位置まで導入する。この際、操作部38を操作して湾曲部34bを湾曲させる他、挿入を容易にするテクニックの1つとして、術者が挿入部34を把持して挿入部34の軸回りに回動または回転させながら挿入することがある。このように、挿入部34を回動させると、その回動力が基部32に伝達される。内視鏡保持部120に保持された基部32も挿入部34の回動に伴って回動する。このため、さらに、この基部32からユニバーサルケーブル36やチューブ82に挿入部34の回動力が伝達される。
内視鏡12を挿入部34の軸回りに回動させたとき、第1および第2の支持部106,108によって、ユニバーサルケーブル36およびチューブ82の位置が独立して規定されるので、ユニバーサルケーブル36およびチューブ82が互いに対して干渉することが極力防止された状態を維持することができる。したがって、内視鏡12の挿入部34を回動させたときに、ユニバーサルケーブル36およびチューブ82のねじれが解放され、回動させ易い状態を極力維持することができる。
図5(C)に示すように、テーブル130は、第1の実施の形態で説明したテーブル130(図3(C)参照)と形状が異なり、略円盤状に形成されている。すなわち、テーブル130がシャフト124に対して回動または回転し、バンドルリテナ134がシャフト124の軸回りに回動または回転する。
シャフト124の先端部(図7(A)および図7(B)中では上端部)には、フランジ部124bが形成されている。このフランジ部124bは、図7(C)に示すように、略長方形盤状に形成されている。
フランジ部124b上には、1つの軸部材138がシャフト124と同じ軸上に固定され、1対の軸部材138がシャフト124の長手軸方向に対して対称の位置に固定されている。その他の構成は第3の実施の形態で説明した第3の支持部112の構成と同様である。
Claims (6)
- 医療器具本体と、
この医療器具本体から延出された細長で軟性の第1の軟性体と、
前記医療器具本体から前記第1の軟性体とは異なる方向に、もしくは、異なる位置から延出された細長で軟性の第2の軟性体と、
前記医療器具本体を回動可能に支持するアームと、
前記第1の軟性体を移動可能に保持する第1の保持部材と、
前記第2の軟性体を移動可能に保持する第2の保持部材と
を具備することを特徴とする医療装置。 - 前記第1の保持部材は、前記第1の軟性体をその軸方向に進退可能に保持し、
前記第2の保持部材は、前記第1の保持部材に対して所定距離離間され、前記第2の軟性体をその軸方向に進退可能に保持することを特徴とする請求項1に記載の医療装置。 - 前記第1の保持部材は、前記第1の軟性体をその軸回りに回動可能に保持し、
前記第2の保持部材は、前記第1の保持部材に対して所定距離離間され、前記第2の軟性体をその軸回りに回動可能に保持することを特徴とする請求項1に記載の医療装置。 - 前記第1の保持部材は、前記第1の軟性体をその軸方向に進退可能に保持し、
前記第2の保持部材は、前記第2の軟性体をその軸方向に進退可能に保持するとともに、
前記第1および第2の保持部材は、前記第1および第2の軟性体をそれぞれその軸回りに回動可能に支持する支持機構を備えていることを特徴とする請求項3に記載の医療装置。 - 前記第1および第2の保持部材の少なくとも一方は、前記アームに設けられていることを特徴とする請求項1ないし請求項4のいずれか1に記載の医療装置。
- 前記第1および第2の保持部材の少なくとも一方は、天井から吊るされていることを特徴とする請求項1ないし請求項4のいずれか1に記載の医療装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005257967A JP2007068708A (ja) | 2005-09-06 | 2005-09-06 | 医療装置 |
| PCT/JP2006/310255 WO2007029379A1 (ja) | 2005-09-06 | 2006-05-23 | 医療装置 |
| EP06746739A EP1922975A4 (en) | 2005-09-06 | 2006-05-23 | MEDICAL DEVICE |
| CNU2006201390585U CN200945194Y (zh) | 2005-09-06 | 2006-09-05 | 医疗装置 |
| CNB2006101276705A CN100525726C (zh) | 2005-09-06 | 2006-09-05 | 医疗装置 |
| US12/026,846 US20080132755A1 (en) | 2005-09-06 | 2008-02-06 | Medical device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005257967A JP2007068708A (ja) | 2005-09-06 | 2005-09-06 | 医療装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007068708A true JP2007068708A (ja) | 2007-03-22 |
| JP2007068708A5 JP2007068708A5 (ja) | 2009-01-22 |
Family
ID=37835512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005257967A Pending JP2007068708A (ja) | 2005-09-06 | 2005-09-06 | 医療装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20080132755A1 (ja) |
| EP (1) | EP1922975A4 (ja) |
| JP (1) | JP2007068708A (ja) |
| CN (2) | CN200945194Y (ja) |
| WO (1) | WO2007029379A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021087604A (ja) * | 2019-12-04 | 2021-06-10 | Hoya株式会社 | 内視鏡装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007068708A (ja) * | 2005-09-06 | 2007-03-22 | Olympus Medical Systems Corp | 医療装置 |
| EP2465540B1 (en) | 2009-08-11 | 2016-10-05 | Fuji Chemical Industry Co., Ltd. | Disintegrating particle composition and orally rapidly disintegrating tablet |
| WO2011019045A1 (ja) | 2009-08-11 | 2011-02-17 | 富士化学工業株式会社 | 崩壊性粒子組成物及び口腔内速崩壊錠 |
| JP2016016157A (ja) * | 2014-07-09 | 2016-02-01 | Hoya株式会社 | 内視鏡のケーブル保持具 |
| CN104224104B (zh) * | 2014-10-09 | 2017-01-18 | 浙江优亿医疗器械有限公司 | 用于可调整插入方向的软管喉镜的套管 |
| AU2018201287B2 (en) * | 2017-03-07 | 2019-01-03 | Stryker Corporation | Medical multi-link boom |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07241300A (ja) * | 1994-03-04 | 1995-09-19 | Olympus Optical Co Ltd | 医療器具の保持装置 |
| JP2001187066A (ja) * | 1999-12-27 | 2001-07-10 | Olympus Optical Co Ltd | 手術用顕微鏡 |
| JP2005168821A (ja) * | 2003-12-11 | 2005-06-30 | Olympus Corp | 医療用器具保持装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6569084B1 (en) * | 1999-03-31 | 2003-05-27 | Olympus Optical Co., Ltd. | Endoscope holder and endoscope device |
| JP2005137599A (ja) * | 2003-11-06 | 2005-06-02 | Olympus Corp | 手術システム |
| JP2007068708A (ja) * | 2005-09-06 | 2007-03-22 | Olympus Medical Systems Corp | 医療装置 |
-
2005
- 2005-09-06 JP JP2005257967A patent/JP2007068708A/ja active Pending
-
2006
- 2006-05-23 EP EP06746739A patent/EP1922975A4/en not_active Withdrawn
- 2006-05-23 WO PCT/JP2006/310255 patent/WO2007029379A1/ja active Application Filing
- 2006-09-05 CN CNU2006201390585U patent/CN200945194Y/zh not_active Expired - Fee Related
- 2006-09-05 CN CNB2006101276705A patent/CN100525726C/zh not_active Expired - Fee Related
-
2008
- 2008-02-06 US US12/026,846 patent/US20080132755A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07241300A (ja) * | 1994-03-04 | 1995-09-19 | Olympus Optical Co Ltd | 医療器具の保持装置 |
| JP2001187066A (ja) * | 1999-12-27 | 2001-07-10 | Olympus Optical Co Ltd | 手術用顕微鏡 |
| JP2005168821A (ja) * | 2003-12-11 | 2005-06-30 | Olympus Corp | 医療用器具保持装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021087604A (ja) * | 2019-12-04 | 2021-06-10 | Hoya株式会社 | 内視鏡装置 |
| WO2021111920A1 (ja) * | 2019-12-04 | 2021-06-10 | Hoya株式会社 | 内視鏡装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2007029379A1 (ja) | 2007-03-15 |
| EP1922975A1 (en) | 2008-05-21 |
| CN1927133A (zh) | 2007-03-14 |
| CN100525726C (zh) | 2009-08-12 |
| CN200945194Y (zh) | 2007-09-12 |
| EP1922975A4 (en) | 2010-01-20 |
| US20080132755A1 (en) | 2008-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7080986B2 (ja) | 器具ベースの挿入アーキテクチャのためのシステム及び方法 | |
| US11198226B2 (en) | Surgical robot | |
| US11219496B2 (en) | Surgical tool, medical treatment instrument, and surgical system | |
| JP6274630B2 (ja) | 多関節器具位置決め装置およびそれを採用するシステム | |
| CN107530134B (zh) | 机电手术系统 | |
| US6554766B2 (en) | Endoscope device | |
| JP7148242B2 (ja) | 手術用ロボット | |
| Rosen et al. | Roboscope: A flexible and bendable surgical robot for single portal minimally invasive surgery | |
| JP2007068708A (ja) | 医療装置 | |
| US20080171910A1 (en) | Medical apparatus | |
| JP4813067B2 (ja) | 内視鏡装置 | |
| CN115553921A (zh) | 具有联动式控制模式的医疗机器人系统 | |
| US20190159852A1 (en) | Surgical tool, medical treatment instrument, and surgical system | |
| JP2015217017A (ja) | 処置具用アダプタ、内視鏡および内視鏡システム | |
| US20170071458A1 (en) | Guiding device and surgical system | |
| US20200323420A1 (en) | Endoscopic multi-tool | |
| US11369447B2 (en) | Surgical system and support device | |
| WO2023200981A1 (en) | Endoscopic devices, systems and methods | |
| WO2018070042A1 (ja) | 医療用器具および手術システム | |
| JP4402444B2 (ja) | 内視鏡保持装置 | |
| LAM et al. | Implementation of a Novel Handheld Endoscopic Operation Platform (EndoGRASP) | |
| CA3040092A1 (en) | Endoscopic multi-tool | |
| WO2018070040A1 (ja) | 把持機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110905 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120529 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120821 |