JP2006258465A - 3次元画像情報取得システム - Google Patents
3次元画像情報取得システム Download PDFInfo
- Publication number
- JP2006258465A JP2006258465A JP2005073032A JP2005073032A JP2006258465A JP 2006258465 A JP2006258465 A JP 2006258465A JP 2005073032 A JP2005073032 A JP 2005073032A JP 2005073032 A JP2005073032 A JP 2005073032A JP 2006258465 A JP2006258465 A JP 2006258465A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- image information
- dimensional image
- information
- laser
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Image Input (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【解決手段】 時間変調したレーザ光を測定対象物に向けてそれぞれ同時に照射する、それぞれ異なる位置に配置された複数のレーザ光出射部と、受光した複数のレーザ光の反射光に応じた電気信号をそれぞれ出力する、それぞれ異なる位置に配置された複数の光電変換器と、ON状態のマイクロミラーで反射した複数のレーザ光を、各光電変換器の受光面に導く空間変調素子と、各光電変換器から出力された電気信号それぞれについて、各光電変換器の受光面が受光した複数のレーザ光それぞれに応じた電気信号成分を識別する電気信号成分識別部と、各電器信号成分毎に測定対象物の3次元位置情報を求める位置情報算出部とを有する3次元画像情報取得システムを提供する。
【選択図】図2
Description
対象物の3次元位置情報を取得するには、種々の方法が知られている。
複数のカメラを搭載したシステムでは撮影画像を用いて対象物の位置情報を取得し、また複数の距離センサを用いたシステムでは対象物の距離情報を距離センサから取得する。また、カメラと距離センサを組み合わせたシステムでは対象物の撮影画像と距離情報を取得して対象物の3次元位置情報を取得する。
また、軍事、保安用レーザレーダとして、また火星探査ロボットとして、対象物の3次元位置情報を取得することが望まれている。
また、レーザ光をポリゴンミラーやガルバノミラーに反射させて対象物上で2次元的に走査し、対象物から反射されてくるレーザ光を受光することによって対象物の位置情報を知り、これと別途三角測量法やパルスエコー法を用いて求めた距離情報とともに対象物の3次元位置情報を取得する方法が知られている(非特許文献2)。
また、レーザ光を対象物上にスリット投影して、対象物に投影されたスリット状のレーザ光の変形状態を用いて対象物の3次元形状を知る方法が知られている(非特許文献3)。
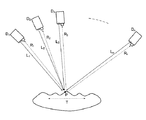
システム10は、それぞれ異なる位置から出射したレーザ光を測定対象物Sに照射し、測定対象物Sで反射した各レーザ光の反射光を、それぞれ異なる位置に配置した複数の光電変換器それぞれの受光面で受光することにより取得される測定対象物Tの表面の3次元位置情報と、測定対象物Tの表面における反射率とにより3次元画像情報を取得するシステムである。
移相器44は、RF変調信号を位相シフトさせることなく通過させ、また位相制御信号に応じて90度位相シフトさせて位相シフト変調信号を生成する。これらの信号(RF変調信号または位相シフト変調信号)は、増幅器45を介してRFスプリッタ48に送られる。RFスプリッタ48は、これらの信号(RF変調信号または位相シフト変調信号)を、測定データバス49を介して、各カメラD1〜Dnそれぞれのデータ処理ユニット50に分配する。
カメラD1は、レーザ光出射ユニット20と、光学ユニット30と、データ処理ユニット50とを有する。レーザ光出射ユニット20は、制御装置14の測定データバス49および制御データバス56と接続されている。
プリズム33は、後述する空間変調素子34とともに用いて、空間変調素子34のマイクロミラーで反射したレーザ光を、斜行面33aで透過あるいは全反射させる部分である。具体的には、プリズム33は、空間変調素子34のマイクロミラーのうち、所定の向きに反射面の向いたマイクロミラー(ON状態のマイクロミラー)にて反射されたレーザ光のみプリズム33の斜行面33aを透過させ、所定の向きに反射面が向かないマイクロミラー(OFF状態のマイクロミラー)にて反射されたレーザ光を斜行面33aで全反射させるように配置される。
ON状態にあるマイクロミラーAの反射面で反射したレーザ光はレンズ36を介して光電変換器38に導かれ、OFF状態にあるマイクロミラーBの反射面で反射したレーザ光は光電変換器38と異なる方向に反射する。このように、ON状態にあるマイクロミラーで反射されたレーザ光は光電変換器38にて受光される。上述のように、カメラD1の光電変換器38は、L1R1、L2R1、L3R1・・・LnR1で表されるn個の経路(パス)のレーザ光(の反射光)を受光する。空間変調素子34の各マイクロミラーは、測定対象領域Tの、各マイクロミラーに対応する各測定単位領域それぞれで反射された、n個のパスを通るレーザ光の反射光の情報それぞれを、この光電変換器38の受光面に送る。システム10ではn個のカメラが配置されており、システム10全体では上述のように、測定対象領域Tの、各マイクロミラーに対応する1つの測定単位領域毎に、n×n個のパスを通るレーザ光の反射光の情報がそれぞれ得られる。
空間変調素子34は、各マイクロミラーの状態をON状態/OFF状態に切り換えるためのマイクロミラー制御器35と接続されている。マイクロミラー制御器35の制御により、全マイクロミラーのうち半数以上がON状態となるマイクロミラーの異なる制御パターンに順次切り換えられる。
図6(a)は、64個(=8個×8個)のマイクロミラーアレイの空間変調素子34について、マイクロミラーの反射面の側から見た制御パターンの一例を説明する図である。
マイクロミラーは、縦方向に8列、横方向に8列、矩形形状に配列されている。図6(a)中、灰色のマイクロミラーはON状態、白色のマイクロミラーはOFF状態を示している。
このような制御パターンは、ON状態のマイクロミラーが全マイクロミラーの50%以上占める制御パターンである。制御パターンは、後述する制御回路ユニット50にて作成される制御パターン信号で制御される。
一方、空間変調素子34において制御しようとするマイクロミラーの縦方向及び横方向の位置における、横方向の1次元制御パターン及び縦方向の1次元制御パターンの値(1又は−1)をそれぞれ参照し、縦方向の値と横方向の値の積が1になる場合、制御しようとするマイクロミラーはON状態とし、積が−1となる場合マイクロミラーはOFF状態に設定する。例えば、3行5列の位置にあるマイクロミラーMの、横方向の1次元制御パターンの値は−1であり、縦方向の1次元制御パターンの値は−1であり、積は1である。このことから、マイクロミラーMはON状態に設定される。こうしてON状態のマイクロミラーの数が全マイクロミラーの数の50%以上となる制御パターンの制御パターン信号が作成される。
この場合、マイクロミラーの制御パターンは、横方向の1次元制御パタ−ン及び縦方向の1次元制御パターンを組み合わせて64通り(=8×8)作成でき、この64個の異なる制御パターンを順次切り換えるように制御パターン信号が作成される。
このように制御パターンは、アダマール行列の選択された各行同士のテンソル積によって生成される。
このように空間変調素子34は、異なる制御パターンに順次切り替えながら測定対象物Tから到来するレーザ光を反射する。
光電変換器38は、受光したレーザ光を電気信号に変換する部分であり、光電子倍増管やアバランシェフォトダイオード等のデバイスが設けられ、このデバイスからそれぞれ電気信号が出力される。なお、上記デバイスは用いるレーザ光によって適するデバイスが異なり、例えば近赤外(800〜1200μm)のレーザ光にはアバランシェフォトダイオードが、可視帯域(400μm〜800μm)のレーザ光にはアバランシェフォトダイオード又は光電子倍増管が好適に用いられる。
CPU60は、カメラDの各ユニットの駆動(レーザ光の出射や、マイクロミラーの駆動など)を制御する各種信号を、制御装置14の制御回路ユニット50に作成するように指示し、また後述するデータ処理部64の各処理の演算を実質的に行う部分である。
信号変換部66は、各カメラD1〜Dnから送信された中間周波数デジタル信号それぞれについて、中間周波数デジタル信号を、制御パターン信号及びPN符号化変調信号を用いて変換する部分である。これにより、各カメラD1〜Dnから送信された中間周波数デジタル信号それぞれについて、測定対象領域Tにおける1つの測定単位領域(マイクロミラーアレイ空間変調素子34の、1つのマイクロミラーに対応する領域)毎の測定単位領域信号成分に分割し、さらにこの測定単位領域信号成分毎に、各測定単位領域で反射される、n個のレーザ光反射光毎のレーザ光信号成分に分割する。そして、各レーザ光信号成分における信号強度に応じて、重み付け係数を設定する。制御パターン信号は、コンピュータ14の指示に従って制御装置14のシステム制御器51で作成される信号であるため、制御パターン信号は既知であり、この制御パターン信号を用いて信号変換される。
上記制御パターンはアダマール行列の行成分同士のテンソル積によって得られる合成行列によって表されるため、互いに直交性を有するものであるが、本発明においては、制御パターンは、上記合成行列によって生成される必要はなく、各マイクロミラー毎に反射されるレーザ光の情報に分解できる限りにおいて特に制限されない。
なお、各カメラ毎にアダマール逆変換にて求められる、各マイクロミラー毎に反射されるレーザ光の情報(測定単位領域信号成分)は、各カメラD1〜Dnから出射されるレーザ光(n個のレーザ光)が互いに重畳されている。このため、以下に示すようにレーザ光の出射の際に時間変調に用いたPN符号化変調信号の自己相関性及び直交性を利用して各レーザ光に対応した中間周波数デジタル信号(レーザ光信号成分)に分解する。PN符号化変調信号の自己相関性及び直交性については後述する。
図8は、PN符号化変調信号の一例を示す図である。図8では、PN符号化変調信号の1周期分が示されている。
PN符号化変調信号は値が0又は1からなる信号で、一定の時間間隔シフトすることによって相関関数の値が0又は−1/n(nは後述する系列符号の長さ)となる。
PN符号化変調信号は、一例を挙げると以下のように作成される符号化系列データを用いて信号化することができる。
次数k=5、符号系列の長さn=31とし、係数h1=1,h2=1,h3=0,h4=1,h5=1とし、初期値a0=1,a1=1,a2=0,a3=1,a4=0としたとき下記式(1)に示す漸化式で一意的にPN系列符号C={ak}(kは自然数)を求めることができる。
この符号化系列信号を生成するために用いられる系列符号C,Tq1・C,Tq2・Cは、互いに直交する特性を有するので、生成される符号化系列信号も互いに直交する性質を有する。
すなわち、系列符号CとC’は自己相関性を持ち、かつ直交性を有するといえる。
このようなPN系列符号の値を0,1として時系列信号としたのがPN符号化系列信号である。したがって、PN符号化変調信号も互いに自己相関性及び直交性を有する。このことから、図6におけるC1の信号と、C2〜C5の信号の相関関数を求めると値が0となる。
このようにして、信号変換部66は、アダマール逆変換及びPN符号化変調信号の自己相関性及び直交性を利用した分解(符号化識別変換)により、中間周波数デジタル信号から各マイクロミラーの反射位置における各レーザ光の時間変調の信号情報を取得することができる。
なお、PN符号化変調信号による時間変調は100KHz〜10MHzの周波数で行われ、RF変調信号によるレーザ光の時間変調の周波数(50MHz〜10GHz)に比べて低周波である。
信号変換部66では、このように、n個のカメラそれぞれについて、各マイクロミラーの反射位置におけるn個のレーザ光それぞれの時間変調の信号情報を取得する。すなわち、測定対象物S表面の1つの測定単位領域(1つのマイクロミラーに対応する)につき、n×n個のレーザ光の時間変調の信号情報(電気信号)が得られる。
具体的には、本体部12のレーザ光出射ユニット20のレーザダイオード22から測定対象物Tまでの距離と測定対象物Tの表面上の反射点からレンズ32に至るまでの距離をρ、RF変調信号の波長をλ、RF変調信号の周波数をf、光速度をc、各レーザ光の信号の、RF変調信号に対する位相ずれをθとすると、距離ρは、下記式(5)を介して下記式(6)のように表すことができる。
なお、距離ρはレーザダイオード22から測定対象物Tの表面上の反射点を経由して光学レンズ36までの距離であるが、この距離ρを知れば十分である。光学レンズ32から光電変換器38の受光面までの光路の距離、さらにはミキサ47にいたる伝送線路の距離は既知であるため、予め定められた補正式等を用いて正しい値に修正することができる。
距離情報算出部68は、具体的には、信号変換部66で算出された各マイクロミラーの反射位置における各レーザ光毎の信号情報を取得する。この信号情報は、ミキサ47へ入る参照信号であるRF変調信号の位相シフトを0としたときr・cos(θ)(rは測定対象物の表面における反射率、θは位相ずれ量)となり、RF変調信号を90度位相シフトさせたときr・sin(θ)となることから、距離情報算出部68は、これらの信号を用いて位相ずれ量θを算出する。
具体的には、図9(a)に示すように、光学レンズ32の中心を原点OとしてXYZ直交座標系を定め、各レーザ光情報に対応したレーザダイオード22の出射位置を点Q(位置座標(a,b,c)とする)、測定対象物Tの反射位置を点P(位置座標(x,y,z)とする)、点Pで反射したレーザ光が向かう空間変調素子34のON状態にあるマイクロミラーの位置R(位置座標(−x0,−y0,−z0)とする)とする。このとき、図9(b)に示すように、距離POは、レンズ32の倍率mと距離ROとを用いてPO=m×ROと表すことができる。なお、マイクロミラーの位置Rのうちz0は装置固有の寸法として設定されている。
一方、距離ρは下記式(7)で表すことができる。また、点Pの位置x,y,zは、下記式(8)で表すことができることから、式(7)及び式(8)を用いて倍率mは下記式(9)で表すことができる。

距離情報算出部68において説明したように、信号変換部66では、各マイクロミラーの反射位置における各レーザ光の信号情報が算出され、これが反射率算出部72に供給される。この信号は、ミキサ47へ入る参照信号であるRF変調信号の位相シフトを0としたときに得られる信号情報は上述したようにr・cos(θ)となり、RF変調信号を90度位相シフトさせたときに得られる信号情報はr・sin(θ)となる。これら2つの信号情報の値から反射率算出部72は反射率rを算出する。
図10(a)〜(d)は、システム10の駆動の際に生成される各種トリガ信号のタイミングチャートである。
次に、システム制御器51では、各カメラの空間変調素子34を所定の制御パターンでマイクロミラーを制御するようにフレームトリガ信号が生成される。フレームトリガ信号とは、空間変調素子34の制御パターンを切り換えるためのトリガ信号であって、上述したようにマイクロミラーのON状態の配列を所定のパターンに制御した制御パターンを順次切り換えるためのトリガ信号である。
フレームトリガ信号が生成されると、レーザ光は複数のカメラから、複数同時に出射されるので、光電変換器38における受光において、どのカメラからのレーザ光を受光したのか識別可能としなければならない。このため各レーザ光をPN符号化変調信号によって時間変調(レーザ光の出射のON/OFF)するために、システム制御器51はレーザ光毎に互いに異なるPN符号化変調信号を生成し、各カメラのレーザドライバにそれぞれ供給する。
すなわち、各カメラから出射されるレーザ光の強度は時間変調されるとともに、さらに、PN符号化変調信号によるレーザ光の出射のON/OFFにより時間変調される。周波数fは50MHz〜10GHzであり、PN符号化変調信号による出射のON/OFFの切換周波数は100KHz〜10MHzであり、時間変調の周波数範囲が互いに大きく異なる。
ミキサ47では、増幅器48から供給された電気信号を2つのローカル信号のそれぞれでミキシング(乗算)し、IF信号及び高次成分からなる信号が生成される。IF信号には、周波数fの時間変調の信号情報と、PN符号化変調信号による時間変調の信号情報が含まれる。
さらに、生成された信号からローパスフィルタ52により高次成分が除去され、周波数fの時間変調の信号情報とPN符号化変調信号による時間変調の信号情報とからなるIF信号が生成される。
こうして増幅器53を介してA/D変換器54に取り込まれ、順次サンプリングクロック信号(図10(d)参照)に従ってサンプリングされ、中間周波数デジタル信号とされ、コンピュータ14に供給される。
信号変換部66では、各モードの中間周波数デジタル信号を用いて、アダマール逆変換及び符号化識別変換が行われる。
各モード毎に定められるマイクロミラーのON状態の制御パターンは、アダマール行列の各行間のテンソル積を利用したパターンを用いるので、この各モードの制御パターン毎に得られた中間周波数デジタル信号を用いてマイクロミラー毎の中間周波数デジタル信号に分解する。この分解はアダマール逆変換を利用して行われる。
この位相ずれ量を上述した式(6)に代入することで、測定対象物Tの距離ρが求められる。この距離ρは、レーザ光毎に、かつ空間変調素子34のマイクロミラー毎に求められる。3次元位置情報算出部70では、距離情報算出部68で求められた距離ρとマイクロミラーの位置情報とを用いてレーザ光の反射した測定対象物Tの表面の3次元位置座標(x,y,z)が上述した式(8)及び(9)を用いて求められる。
こうして3次元位置情報算出部70及び反射率算出部72で求められた3次元位置情報及び反射率がディスプレイ16に供給されて、測定対象物Tの3次元画像が表示される。
なお、反射率riは測定対象物Tの表面の反射率を表し、例えばレーザ光が赤、緑及び青の3原色の可視レーザ光であれば、3原色における測定対象物Tの表面における反射率を求めることができる。すなわち、測定対象物Tの表面の色情報を取得することができ、測定対象物Tの3次元カラー画像を取得することができる。
14 制御装置
16 コンピュータ
20 レーザ光出射ユニット
22 レーザダイオード
24 レーザドライバ
28 光学レンズ
30 光学ユニット
31 バンドパスフィルタ
32 光学レンズ
33 プリズム
34 マイクロミラーアレイ空間変調素子
35 マイクロミラー制御器
36 光学レンズ
37 ミラー
38 光電変換器
41 発振器
42 パワースプリッタ
43 増幅器
44 移相器
45 増幅器
46 パワースプリッタ
47 ミキサ
48 RFスプリッタ
49 測定データバス
50 データ処理ユニット
51 システム制御器
54 A/D変換器
60 CPU60
62 メモリ
64 データ処理部
66 信号変換部
68 距離情報算出部
70 3次元位置情報算出部
72 反射率算出部
74 重み付け係数設定部
76 3次元画像情報生成部
Claims (4)
- それぞれ異なる位置から出射した複数のレーザ光を測定対象物に照射し、測定対象物で反射した各レーザ光の反射光を受光することにより測定対象物の3次元画像情報を取得する3次元画像情報取得システムであって、
振幅変調信号に従って時間変調したレーザ光を、測定対象物に向けてそれぞれ同時に照射する、それぞれ異なる位置に配置された複数のレーザ光出射部と、
測定対象物で反射した複数のレーザ光を受光して、受光した複数のレーザ光に応じた電気信号をそれぞれ出力する複数の光電変換器と、
各光電変換器それぞれに対応して設けられた、平面上に配列された複数のマイクロミラーを有する素子であり、これらのマイクロミラーのうち選択されたマイクロミラーの反射面を所定の向きに制御してON状態にすることにより、このON状態のマイクロミラーで反射した、測定対象物からの複数のレーザ光を、対応する各光電変換器の受光面それぞれに導く、それぞれ異なる位置に配置されたマイクロミラーアレイ空間変調素子と、
各光電変換器から出力された電気信号それぞれについて、各光電変換器の受光面が受光した複数のレーザ光それぞれに応じた電気信号成分を識別する電気信号成分識別部と、
前記電気信号成分識別部において識別された各電気信号成分それぞれにおける、前記振幅変調信号に対する位相ずれ情報を取得するとともに、各電気信号成分それぞれの位相ずれ情報と、各レーザ光それぞれの出射位置の情報と、各マイクロミラーアレイ空間変調素子の配置位置の情報と、各マイクロミラーアレイ空間変調素子における前記ON状態のマイクロミラーの配列位置の情報とを用いて、各レーザ光に対応する電気信号成分それぞれについて、測定対象物の3次元位置情報を求める位置情報算出部と、
各レーザ光に対応する電気信号成分それぞれについて求められた、複数の前記測定対象物の3次元位置情報に基づき、前記測定対象物の3次元画像情報を作成する3次元画像情報作成部とを有する3次元画像情報取得システム。 - 前記複数のレーザ光出射部から同時に出射される複数のレーザ光それぞれは、前記振幅変調信号により時間変調されるとともに、さらに各レーザ光毎に識別可能な符号化変調信号で時間変調され、
前記電気信号成分識別部は、前記電気信号に含まれる符号化変調信号の情報を利用して、複数のレーザ光それぞれに応じた電気信号成分を識別する請求項1に記載の3次元画像情報取得システム。 - 前記マイクロミラーアレイ空間変調素子は、ON状態のマイクロミラーが全マイクロミラーの50%以上を占める、マイクロミラーの制御パターンが順次切り換えられ、この制御パターンに応じて空間変調されたレーザ光を前記光電変換器の受光面に導く請求項1または2に記載の3次元画像情報取得システム。
- 順次切り換えられる前記制御パターンは、互いに直交性を有する制御パターンである請求項3に記載の3次元画像情報取得システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005073032A JP4401989B2 (ja) | 2005-03-15 | 2005-03-15 | 3次元画像情報取得システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005073032A JP4401989B2 (ja) | 2005-03-15 | 2005-03-15 | 3次元画像情報取得システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006258465A true JP2006258465A (ja) | 2006-09-28 |
| JP4401989B2 JP4401989B2 (ja) | 2010-01-20 |
Family
ID=37097911
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005073032A Expired - Fee Related JP4401989B2 (ja) | 2005-03-15 | 2005-03-15 | 3次元画像情報取得システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4401989B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013148522A1 (en) * | 2012-03-24 | 2013-10-03 | Laser Projection Technologies | Lasergrammetry system and methods |
| WO2013175596A1 (ja) * | 2012-05-23 | 2013-11-28 | パイオニア株式会社 | 電力伝送システム及び方法、送電装置並びに受電装置 |
| US9879983B2 (en) | 2013-08-06 | 2018-01-30 | Faro Technologies, Inc. | Virtual laser projection system and method |
| WO2020159434A1 (en) * | 2019-02-01 | 2020-08-06 | Mit Semiconductor Pte Ltd | System and method of object inspection using multispectral 3d laser scanning |
| JP2021518562A (ja) * | 2018-03-15 | 2021-08-02 | メトリオ センサーズ アイエヌシー. | 撮像lidarシステムの性能を改善するためのシステム、装置、及び方法 |
| WO2021162815A1 (en) * | 2020-02-15 | 2021-08-19 | Hewlett-Packard Development Company, L.P. | Scanning of objects |
| CN116659381A (zh) * | 2023-05-29 | 2023-08-29 | 惠州市施莱格科技有限公司 | 一种测量光栅及其该测量光栅的测量控制方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7257751B2 (ja) | 2018-07-27 | 2023-04-14 | 京セラ株式会社 | 電磁波検出装置 |
-
2005
- 2005-03-15 JP JP2005073032A patent/JP4401989B2/ja not_active Expired - Fee Related
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013148522A1 (en) * | 2012-03-24 | 2013-10-03 | Laser Projection Technologies | Lasergrammetry system and methods |
| WO2013175596A1 (ja) * | 2012-05-23 | 2013-11-28 | パイオニア株式会社 | 電力伝送システム及び方法、送電装置並びに受電装置 |
| US9620964B2 (en) | 2012-05-23 | 2017-04-11 | Pioneer Corporation | Power transmission system and method, power transmitting apparatus and power receiving apparatus |
| US9879983B2 (en) | 2013-08-06 | 2018-01-30 | Faro Technologies, Inc. | Virtual laser projection system and method |
| JP2021518562A (ja) * | 2018-03-15 | 2021-08-02 | メトリオ センサーズ アイエヌシー. | 撮像lidarシステムの性能を改善するためのシステム、装置、及び方法 |
| WO2020159434A1 (en) * | 2019-02-01 | 2020-08-06 | Mit Semiconductor Pte Ltd | System and method of object inspection using multispectral 3d laser scanning |
| CN113474618A (zh) * | 2019-02-01 | 2021-10-01 | 砺铸智能装备私人有限公司 | 使用多光谱3d激光扫描的对象检查的系统和方法 |
| CN113474618B (zh) * | 2019-02-01 | 2024-03-15 | 砺铸智能设备(天津)有限公司 | 使用多光谱3d激光扫描的对象检查的系统和方法 |
| US11953312B2 (en) | 2019-02-01 | 2024-04-09 | Mit Semiconductor (Tian Jin) Co., Ltd | System and method of object inspection using multispectral 3D laser scanning |
| WO2021162815A1 (en) * | 2020-02-15 | 2021-08-19 | Hewlett-Packard Development Company, L.P. | Scanning of objects |
| CN116659381A (zh) * | 2023-05-29 | 2023-08-29 | 惠州市施莱格科技有限公司 | 一种测量光栅及其该测量光栅的测量控制方法 |
| CN116659381B (zh) * | 2023-05-29 | 2024-02-02 | 惠州市施莱格科技有限公司 | 一种测量光栅及其该测量光栅的测量控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4401989B2 (ja) | 2010-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4897430B2 (ja) | 画像情報取得装置 | |
| JP4401989B2 (ja) | 3次元画像情報取得システム | |
| US10473768B2 (en) | Lidar system | |
| JP6817387B2 (ja) | Ladarシステム及び方法 | |
| JP4401988B2 (ja) | 3次元画像情報取得装置 | |
| US9267787B2 (en) | Depth scanning with multiple emitters | |
| JP6852416B2 (ja) | 距離測定装置、移動体、ロボット、装置及び3次元計測方法 | |
| US7701592B2 (en) | Method and apparatus for combining a targetless optical measurement function and optical projection of information | |
| US9170097B2 (en) | Hybrid system | |
| US6741082B2 (en) | Distance information obtaining apparatus and distance information obtaining method | |
| US11054524B2 (en) | Optimizing a lidar system using sub-sweep sampling | |
| KR101802894B1 (ko) | Tof 및 구조광 방식이 융합된 3차원 영상 획득 시스템 | |
| CN111448474A (zh) | 全波形多脉冲光学测距仪仪器 | |
| JP4392833B2 (ja) | 3次元画像情報取得装置 | |
| JP4346568B2 (ja) | 3次元画像情報取得装置 | |
| CN106791781B (zh) | 一种连续波相位测量式单像素三维成像系统及方法 | |
| JP4488930B2 (ja) | レーザ計測装置 | |
| JP2006250906A (ja) | 3次元ハードコピー装置 | |
| KR101866764B1 (ko) | 통합픽셀로 구성된 거리영상센서 | |
| CN112213730B (zh) | 三维测距方法和装置 | |
| JP2004053532A (ja) | 光学的形状測定装置 | |
| JP6653052B2 (ja) | レーザー測距装置およびレーザー測距方法 | |
| JP3668466B2 (ja) | 実時間レンジファインダ | |
| JP3029004B2 (ja) | 立体ビジョンカメラ | |
| JPH08178632A (ja) | 表面形状測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070329 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20080916 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20081003 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20081003 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20080916 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090526 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091027 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091028 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121106 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131106 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141106 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |