JP2006149689A - 体内医療装置および体内医療システム - Google Patents
体内医療装置および体内医療システム Download PDFInfo
- Publication number
- JP2006149689A JP2006149689A JP2004344963A JP2004344963A JP2006149689A JP 2006149689 A JP2006149689 A JP 2006149689A JP 2004344963 A JP2004344963 A JP 2004344963A JP 2004344963 A JP2004344963 A JP 2004344963A JP 2006149689 A JP2006149689 A JP 2006149689A
- Authority
- JP
- Japan
- Prior art keywords
- medical device
- vivo
- vivo medical
- optical element
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001727 in vivo Methods 0.000 claims abstract description 117
- 230000003287 optical effect Effects 0.000 claims abstract description 40
- 238000003384 imaging method Methods 0.000 claims abstract description 29
- 230000009471 action Effects 0.000 claims abstract description 8
- 238000012545 processing Methods 0.000 claims description 15
- 239000000126 substance Substances 0.000 claims description 14
- 210000001124 body fluid Anatomy 0.000 claims description 7
- 210000003205 muscle Anatomy 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000007689 inspection Methods 0.000 claims description 4
- 239000012530 fluid Substances 0.000 claims description 2
- 230000001678 irradiating effect Effects 0.000 claims 1
- 230000033001 locomotion Effects 0.000 description 23
- 238000011282 treatment Methods 0.000 description 21
- 230000008602 contraction Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 15
- 238000004891 communication Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 14
- 238000011269 treatment regimen Methods 0.000 description 8
- 208000037062 Polyps Diseases 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 239000002775 capsule Substances 0.000 description 6
- 210000004204 blood vessel Anatomy 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 3
- 239000008155 medical solution Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 239000000243 solution Substances 0.000 description 3
- 238000000149 argon plasma sintering Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 239000010839 body fluid Substances 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 238000004146 energy storage Methods 0.000 description 2
- 210000001035 gastrointestinal tract Anatomy 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000002572 peristaltic effect Effects 0.000 description 2
- 230000000750 progressive effect Effects 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 241001481833 Coryphaena hippurus Species 0.000 description 1
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000006907 apoptotic process Effects 0.000 description 1
- 239000012620 biological material Substances 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000004090 dissolution Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 230000023597 hemostasis Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000000338 in vitro Methods 0.000 description 1
- 238000011503 in vivo imaging Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 230000006386 memory function Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 235000015097 nutrients Nutrition 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 210000000813 small intestine Anatomy 0.000 description 1
- 235000002639 sodium chloride Nutrition 0.000 description 1
- 239000011780 sodium chloride Substances 0.000 description 1
- 210000002784 stomach Anatomy 0.000 description 1
- 230000009747 swallowing Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000009210 therapy by ultrasound Methods 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Endoscopes (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
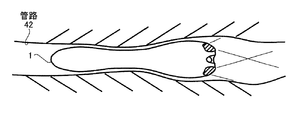
【解決手段】生体内における医療行為を行う体内医療装置1であって、形状が自在に変形する絶縁性ゲル外装18と、前記生体内の情報を取得する機能として光学素子11,撮像素子12,EL素子を含むフレキシブルな撮像手段と、撮像手段を制御するフレキシブルな制御基板14と、撮像手段と制御基板14を接続する導電性ゲル配線17とを備える。
【選択図】 図1
Description
図1は、この発明の実施の形態1である体内医療装置の構成を示す断面図である。また、図2は、この発明の実施の形態1である体内医療装置の構成を示すブロック図である。図1および図2において、この体内医療装置1は、絶縁性のゲル状物質である絶縁性ゲル外装18によって覆われ、あるいは包まれた光学素子11、撮像素子12、EL素子13、制御基板14、シート状電池15、アンテナ16を有し、略円柱状をなしている。光学素子11の形状を可変にする伸縮部材(バイオメタル)21、撮像素子12、EL素子13、制御基板14、シート状電池15、アンテナ16の各部は、導電性のゲル状物質である導電性ゲル配線によって制御基板14に接続される。
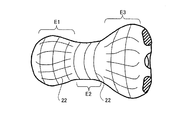
つぎに、この発明の実施の形態2について説明する。上述した実施の形態1では、絶縁性ゲル外装18によって体内医療装置1全体が受動的に変形自在なものとしていたが、この実施の形態2では、能動的に体内医療装置全体を変形し、運動できるようにしている。
つぎに、この発明の実施の形態3について説明する。この実施の形態3では、体外医療装置を設け、体外から体内医療装置を制御するようにしている。
つぎに、この発明の実施の形態4について説明する。上述した実施の形態1〜3では、いずれも各体内医療装置が単独で動作するものであったが、この実施の形態4では、各体内医療装置が特定の役割を果たす単位で分離あるいは連結をするようにしている。
3 体外医療装置
3a 体外医療装置本体
4 入力装置
5 給電装置
6 表示装置
11 光学素子
12 撮像素子
13 EL素子
14 制御基板
15 シート状電池
16,77 アンテナ
17 導電性ゲル配線
18 絶縁性ゲル外装
21,22,23 伸縮部材(バイオメタル)
31 信号処理回路
32,76 通信回路
33,73 制御回路
34,75 RAM
35 ROM
35a 撮像パターン
35b 運動パターン
35c 処置パターン
36 駆動回路
41,42,43 管路
53 発光物質
55 外部給電用コイル
57 バネ配線
61 圧力センサ
71 演算回路
72 記憶部
72a パターンインデックス
74 画像処理回路
81,91 連結部
83 処置部
Claims (10)
- 生体内における医療行為を行う体内医療装置であって、
形状が自在に変形する可変形状外部筐体と、
前記生体内の情報を取得する機能を有する体内情報取得手段と、
を備えたことを特徴とする体内医療装置。 - 前記体内情報取得手段は、形状が可変であることを特徴とする請求項1に記載の体内医療装置。
- 前記可変形状外部筐体は、ゲル状物質を含むことを特徴とする請求項1または2に記載の体内医療装置。
- 前記可変形状外部筐体は、人工筋肉を有し、
少なくとも前記人工筋肉を駆動して前記可変形状外部筐体の形状を制御するとともに前記体内情報取得手段の動作を制御する制御手段を備えたことを特徴とする請求項1〜3のいずれか一つに記載の体内医療装置。 - 前記体内情報取得手段は、
当該装置外に光を照射する光照射手段と、
形状が可変である光学系を形成する光学素子と、
前記光学素子を介して撮像するシート状の撮像手段と、
を備えたことを特徴とする請求項1〜4のいずれか一つに記載の体内医療装置。 - 前記光学素子は、流体であることを特徴とする請求項5に記載の体内医療装置。
- 前記体内情報取得手段は、体液を検査する体液検査手段を備えたことを特徴とする請求項1〜6のいずれか一つに記載の体内医療装置。
- 体外と情報の送受信処理を行う送受信手段を備えたことを特徴とする請求項1〜7のいずれか一つに記載の体内医療装置。
- 他の体外医療装置との連結および分離を行う連結手段を備えたことを特徴とする請求項1〜8のいずれか一つに記載の体内医療装置。
- 請求項4〜9のいずれかに記載の1以上の体内医療装置と、
前記1以上の体内医療装置と無線接続され、体外に配置されて前記体内医療装置の動作を制御する体外医療装置と、
を備えたことを特徴とする体内医療システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004344963A JP4746308B2 (ja) | 2004-11-29 | 2004-11-29 | 体内医療装置および体内医療システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004344963A JP4746308B2 (ja) | 2004-11-29 | 2004-11-29 | 体内医療装置および体内医療システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006149689A true JP2006149689A (ja) | 2006-06-15 |
| JP2006149689A5 JP2006149689A5 (ja) | 2007-12-20 |
| JP4746308B2 JP4746308B2 (ja) | 2011-08-10 |
Family
ID=36628659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004344963A Expired - Fee Related JP4746308B2 (ja) | 2004-11-29 | 2004-11-29 | 体内医療装置および体内医療システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4746308B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009028497A (ja) * | 2007-07-30 | 2009-02-12 | National Yang Ming Univ | 駆動誘導の発光モジュール |
| JP2010005129A (ja) * | 2008-06-26 | 2010-01-14 | Olympus Medical Systems Corp | カプセル型光源装置およびこれを用いた体内画像取得システム |
| JP2010035636A (ja) * | 2008-07-31 | 2010-02-18 | Olympus Medical Systems Corp | カプセル型医療装置 |
| US8439851B2 (en) | 2007-03-01 | 2013-05-14 | Olympus Medical Systems Corp. | Lumen passability checking device, lumen passability checking method, and method of manufacturing lumen passability checking device |
| WO2013147024A1 (ja) * | 2012-03-28 | 2013-10-03 | エイディシーテクノロジー株式会社 | 生体内装置 |
| WO2013145814A1 (ja) * | 2012-03-27 | 2013-10-03 | ソニー株式会社 | 医療システム |
| JP2013539669A (ja) * | 2010-09-17 | 2013-10-28 | チャング ヘ バイオ−メディカル サイエンス(ヤンジョウ)カンパニー リミテッド | 生物医学的用途のマイクロデバイス及びその使用 |
| JPWO2016098818A1 (ja) * | 2014-12-18 | 2017-10-26 | 株式会社パイオラックス | カプセル内視鏡及びカプセル内視鏡検査方法並びにカプセル内視鏡検査装置 |
| WO2018221672A1 (ja) * | 2017-06-01 | 2018-12-06 | Hoya株式会社 | 単回使用内視鏡装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103006222A (zh) * | 2012-12-28 | 2013-04-03 | 安福日昇电子有限公司 | 体腔内部状况监测器 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6137929B2 (ja) * | 1978-12-26 | 1986-08-26 | Olympus Optical Co | |
| JPS6349124A (ja) * | 1986-08-19 | 1988-03-01 | 小林 英治 | 大腸内視鏡 |
| JPH05176986A (ja) * | 1991-08-23 | 1993-07-20 | Olympus Optical Co Ltd | 管腔内挿入物 |
| JPH06114037A (ja) * | 1992-10-05 | 1994-04-26 | Olympus Optical Co Ltd | 医療用カプセル装置 |
| JPH07289504A (ja) * | 1994-04-27 | 1995-11-07 | Olympus Optical Co Ltd | カプセル内視鏡装置 |
| JP2000342523A (ja) * | 1999-06-07 | 2000-12-12 | Asahi Optical Co Ltd | 飲み込み型内視鏡装置 |
| JP2002301018A (ja) * | 2002-02-05 | 2002-10-15 | Olympus Optical Co Ltd | 光走査プローブ装置 |
| JP2003135387A (ja) * | 2001-10-30 | 2003-05-13 | Olympus Optical Co Ltd | カプセル型医療装置 |
| JP2003275170A (ja) * | 2002-03-25 | 2003-09-30 | Olympus Optical Co Ltd | カプセル型医療装置 |
| JP2003325438A (ja) * | 2002-05-10 | 2003-11-18 | Olympus Optical Co Ltd | カプセル型医療装置 |
| JP2004006968A (ja) * | 2003-07-29 | 2004-01-08 | Hamamatsu Photonics Kk | 裏面照射型半導体装置 |
-
2004
- 2004-11-29 JP JP2004344963A patent/JP4746308B2/ja not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6137929B2 (ja) * | 1978-12-26 | 1986-08-26 | Olympus Optical Co | |
| JPS6349124A (ja) * | 1986-08-19 | 1988-03-01 | 小林 英治 | 大腸内視鏡 |
| JPH05176986A (ja) * | 1991-08-23 | 1993-07-20 | Olympus Optical Co Ltd | 管腔内挿入物 |
| JPH06114037A (ja) * | 1992-10-05 | 1994-04-26 | Olympus Optical Co Ltd | 医療用カプセル装置 |
| JPH07289504A (ja) * | 1994-04-27 | 1995-11-07 | Olympus Optical Co Ltd | カプセル内視鏡装置 |
| JP2000342523A (ja) * | 1999-06-07 | 2000-12-12 | Asahi Optical Co Ltd | 飲み込み型内視鏡装置 |
| JP2003135387A (ja) * | 2001-10-30 | 2003-05-13 | Olympus Optical Co Ltd | カプセル型医療装置 |
| JP2002301018A (ja) * | 2002-02-05 | 2002-10-15 | Olympus Optical Co Ltd | 光走査プローブ装置 |
| JP2003275170A (ja) * | 2002-03-25 | 2003-09-30 | Olympus Optical Co Ltd | カプセル型医療装置 |
| JP2003325438A (ja) * | 2002-05-10 | 2003-11-18 | Olympus Optical Co Ltd | カプセル型医療装置 |
| JP2004006968A (ja) * | 2003-07-29 | 2004-01-08 | Hamamatsu Photonics Kk | 裏面照射型半導体装置 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8439851B2 (en) | 2007-03-01 | 2013-05-14 | Olympus Medical Systems Corp. | Lumen passability checking device, lumen passability checking method, and method of manufacturing lumen passability checking device |
| JP2009028497A (ja) * | 2007-07-30 | 2009-02-12 | National Yang Ming Univ | 駆動誘導の発光モジュール |
| JP2010005129A (ja) * | 2008-06-26 | 2010-01-14 | Olympus Medical Systems Corp | カプセル型光源装置およびこれを用いた体内画像取得システム |
| JP2010035636A (ja) * | 2008-07-31 | 2010-02-18 | Olympus Medical Systems Corp | カプセル型医療装置 |
| US8343039B2 (en) | 2008-07-31 | 2013-01-01 | Olympus Medical Systems Corp. | Capsule medical device |
| JP2013539669A (ja) * | 2010-09-17 | 2013-10-28 | チャング ヘ バイオ−メディカル サイエンス(ヤンジョウ)カンパニー リミテッド | 生物医学的用途のマイクロデバイス及びその使用 |
| CN104203067A (zh) * | 2012-03-27 | 2014-12-10 | 索尼公司 | 医疗系统 |
| WO2013145814A1 (ja) * | 2012-03-27 | 2013-10-03 | ソニー株式会社 | 医療システム |
| JPWO2013145814A1 (ja) * | 2012-03-27 | 2015-12-10 | ソニー株式会社 | 医療システム |
| US9511211B2 (en) | 2012-03-27 | 2016-12-06 | Sony Corporation | Medical system including a plurality of capsule type medical devices |
| WO2013147024A1 (ja) * | 2012-03-28 | 2013-10-03 | エイディシーテクノロジー株式会社 | 生体内装置 |
| JPWO2016098818A1 (ja) * | 2014-12-18 | 2017-10-26 | 株式会社パイオラックス | カプセル内視鏡及びカプセル内視鏡検査方法並びにカプセル内視鏡検査装置 |
| WO2018221672A1 (ja) * | 2017-06-01 | 2018-12-06 | Hoya株式会社 | 単回使用内視鏡装置 |
| JPWO2018221672A1 (ja) * | 2017-06-01 | 2019-11-21 | Hoya株式会社 | 単回使用内視鏡装置 |
| CN110494075A (zh) * | 2017-06-01 | 2019-11-22 | Hoya株式会社 | 一次性使用内窥镜装置 |
| US10806330B2 (en) | 2017-06-01 | 2020-10-20 | Hoya Corporation | Single use endoscope device |
| CN110494075B (zh) * | 2017-06-01 | 2020-12-22 | Hoya株式会社 | 一次性使用内窥镜装置 |
| US11229350B2 (en) | 2017-06-01 | 2022-01-25 | Hoya Corporation | Endoscope with bendable insertion unit |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4746308B2 (ja) | 2011-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4231657B2 (ja) | カプセル型医療装置 | |
| JP4578740B2 (ja) | カプセル型医療装置 | |
| JP3863839B2 (ja) | マイクロカプセル型ロボット及び内視鏡システム | |
| JP4416990B2 (ja) | 生体内で装置を操作するためのシステム | |
| JP4472069B2 (ja) | 医療用カプセル内視鏡 | |
| JP4137740B2 (ja) | カプセル型医療装置及びカプセル型医療装置誘導システム | |
| Menciassi et al. | Microrobotics for future gastrointestinal endoscopy | |
| US20110282144A1 (en) | Diagnostic capsules, delivery/retrieval systems, kits and methods | |
| Heung et al. | Design and prototyping of a soft earthworm-like robot targeted for GI tract inspection | |
| KR101510196B1 (ko) | 신체 내 모듈형 캡슐로봇 동작 제어 시스템 | |
| CN113081075B (zh) | 一种具有主动式活检与施药功能的磁控胶囊 | |
| US20040176664A1 (en) | In-vivo extendable element device and system, and method of use | |
| WO2007128084A2 (en) | The controllable microcapsule type robot-endoscope | |
| JP2004041709A (ja) | カプセル医療装置 | |
| WO2020005815A1 (en) | Miniaturized intra-body controllable medical device employing machine learning and artificial intelligence | |
| JP4746308B2 (ja) | 体内医療装置および体内医療システム | |
| CN106618455A (zh) | 一种具有定点施药功能的胶囊内窥镜系统 | |
| JP3852033B2 (ja) | 能動チューブおよび能動チューブシステム | |
| JP4695678B2 (ja) | カプセル型医療装置 | |
| Kim et al. | Prototype modular capsule robots for capsule endoscopies | |
| Xie et al. | Design and validation of a biosensor implantation capsule robot | |
| KR20040108277A (ko) | 캡슐형 로봇 시스템 | |
| Chi et al. | From wired to wireless: a miniature robot for intestinal inspection | |
| Menciassi et al. | Single and multiple robotic capsules for endoluminal diagnosis and surgery | |
| Kim et al. | Smart colonoscope system. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071101 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071101 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100706 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110215 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110406 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110426 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110513 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140520 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |