JP2006111410A - Carried material lifting mechanism in carriage for suspension type lifting and conveying device - Google Patents
Carried material lifting mechanism in carriage for suspension type lifting and conveying deviceInfo
- Publication number
- JP2006111410A JP2006111410A JP2004301178A JP2004301178A JP2006111410A JP 2006111410 A JP2006111410 A JP 2006111410A JP 2004301178 A JP2004301178 A JP 2004301178A JP 2004301178 A JP2004301178 A JP 2004301178A JP 2006111410 A JP2006111410 A JP 2006111410A
- Authority
- JP
- Japan
- Prior art keywords
- timing
- timing belt
- pulley
- tooth
- timing pulley
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Carriers, Traveling Bodies, And Overhead Traveling Cranes (AREA)
Abstract
Description
本発明は、レールに吊下げ状態で走行する懸垂式昇降搬送装置用台車(以下、OHT用台車という)において、例えば、各種処理前後のウエハを収納したキャリアほかの被搬送物を、同期して巻取り、繰出し制御を受ける複数本のタイミングベルトにより昇降させる機構に関するものである。 The present invention relates to a suspended lifting / lowering transport device cart (hereinafter referred to as an OHT cart) that travels in a suspended state on a rail. The present invention relates to a mechanism that moves up and down by a plurality of timing belts that receive winding and feeding control.
例えば、半導体製造工程における各種処理(洗浄、CVDほか)を順次行うために半導体ウエハを収納、搬送するためのキャリアほか、液晶製造、FAなどにおいて板状体を各種処理部に移送させるためのキャリア等の被搬送物用搬送手段は、生産性向上の観点から、近年、懸垂式昇降搬送装置(以下、OHTという)が主流となってきている。
このOHTは、OHT用台車が有する昇降機構によって所定の箇所において前記キャリア等の被搬送物を昇降させるとともに、当該OHT用台車を、所定の軌道に沿って配設されたレールに懸垂状態で移送させる構成をなしている。
For example, a carrier for storing and transporting a semiconductor wafer to sequentially perform various processes (cleaning, CVD, etc.) in a semiconductor manufacturing process, and a carrier for transferring a plate-like body to various processing units in liquid crystal manufacturing, FA, etc. In recent years, a suspension type lifting and lowering transport device (hereinafter referred to as OHT) has become the mainstream of transport means for transported objects such as these from the viewpoint of improving productivity.
The OHT lifts and lowers the object to be transported such as the carrier at a predetermined position by a lifting mechanism of the OHT cart, and transfers the OHT cart in a suspended state to a rail arranged along a predetermined track. It has a configuration to make it.
そして、OHT用台車に設けられ、キャリア等の被搬送物を把持或いはこの把持状態を解除するとともに当該被搬送物を昇降させるハンド部は、通常4箇所でタイミングベルトによって懸垂され、このタイミングベルトの巻取りと繰出しとにより昇降動作を行う。
この、タイミングベルトは、ハンド部の昇降機能のほか、内部にはOHT用台車本体部からハンド部におけるクリッパ駆動用モータを作動させるための電力供給線と、OHT用台車本体のコントローラと、ハンド部のコントローラ相互間での信号の授受のための通信線が埋設され、しかも、繰返し巻取り、繰出しに対して安定した特性が要求される。このため、タイミングベルトは可撓性に富み、所定の強度を備えた材料が用いられる(例えば、特許文献1を参照)。
And the hand part which is provided in the OHT cart and grips the object to be transported such as a carrier or releases the gripped state and lifts the object to be transported is usually suspended by timing belts at four locations. Elevating operation is performed by winding and feeding.
In addition to the lifting / lowering function of the hand unit, the timing belt includes an electric power supply line for operating a clipper driving motor in the hand unit from the OHT cart body unit, a controller of the OHT cart body, and a hand unit. A communication line for exchanging signals between the controllers is embedded, and stable characteristics are required for repeated winding and feeding. For this reason, the timing belt is rich in flexibility, and a material having a predetermined strength is used (see, for example, Patent Document 1).
また、タイミングベルトの長さは略2.7mあり、ハンド部がキャリア等の被搬送物を把持した場合と、把持していない場合では、タイミングベルトに負荷される荷重が大きく変動するが、この変動荷重はタイミングベルト1本当り略4kg程度である。
前記長さ2.7mの4本のタイミングベルトで重量略16kgのキャリアを保持した際、タイミングベルトにバラツキがあると、ハンド部にて把持された被搬送物が傾き、4本のタイミングベルトに負荷される荷重が不均一となり、さらに、タイミングベルトの弾性伸び量もバラツクことになる。これに伴い、被搬送物の傾きが一層拡大され、タイミングベルトがタイミングプーリの噛込み部位において、歯飛び現象(以下、歯飛びという)を起こす危険があった。この歯飛びは被搬送物昇降時における重力方向への被搬送物の移動に伴い、4本のタイミングベルトに負荷される慣性力に起因する張力のアンバランスにより発生することが多い。
In addition, the length of the timing belt is approximately 2.7 m, and the load applied to the timing belt varies greatly depending on whether the hand unit grips a transported object such as a carrier or not. The fluctuating load is about 4 kg per timing belt.
When a carrier having a weight of about 16 kg is held by the four timing belts having a length of 2.7 m, if the timing belt has a variation, the object to be transported held by the hand portion is tilted to form four timing belts. The applied load becomes non-uniform, and the elastic elongation of the timing belt also varies. Along with this, the inclination of the conveyed object is further enlarged, and there is a risk that the timing belt may cause a tooth skipping phenomenon (hereinafter referred to as tooth skipping) at a portion where the timing pulley is engaged. This tooth jump often occurs due to an unbalance of tension caused by the inertial force applied to the four timing belts as the conveyed object moves in the direction of gravity when the conveyed object moves up and down.
タイミングベルトの歯部と、タイミングプーリの歯部との噛み込み部位で歯飛びが発生すると、歯飛びを起こしたタイミングベルトはタイミングプーリの正規の歯部と噛合うことができず、1ピッチ飛ばして次の歯部で噛合うため、被搬送物(ウエハ収納キャリア等)は部分的に1ピッチ相当の長さの滑落を生じて停止する。この滑落現象は、外観的にはハンチング現象として観測される。このようにタイミングベルトがハンチング現象を起こすと、被搬送物に衝撃力が作用し、例えば、被搬送物がウエハを収納したキャリアである場合、当該キャリア内に収納されたウエハはキャリアの内壁面との間で滑りや衝突を起こし、摩擦に起因したパーティクルを発生させ、ウエハの品質、歩留りを低下させ、重度のハンチング現象に至ると被搬送物としてのキャリアの落下もありえる。
また、ハンチング現象によりタイミングベルト歯部には局部的な衝撃力が加わり、タイミングベルトの寿命を著しく短くする。
If tooth skipping occurs at the biting site between the timing belt teeth and the timing pulley teeth, the timing belt that caused the tooth skipping cannot mesh with the regular teeth of the timing pulley and skip one pitch. Since the next tooth portion meshes, the object to be transferred (wafer storage carrier or the like) partially slides down with a length corresponding to one pitch and stops. This sliding phenomenon is observed as a hunting phenomenon in appearance. When the timing belt thus causes a hunting phenomenon, an impact force acts on the object to be conveyed. For example, when the object to be conveyed is a carrier containing a wafer, the wafer stored in the carrier is the inner wall surface of the carrier. Cause slipping or collision between the two and the like, generating particles due to friction, lowering the quality and yield of the wafer, and if a severe hunting phenomenon occurs, the carrier as a transported object may fall.
In addition, a local impact force is applied to the timing belt teeth due to the hunting phenomenon, and the life of the timing belt is significantly shortened.
このような歯飛び、ひいてはハンチング現象を誘発するパラメータとしては
(A)タイミングプーリの歯の形状寸法
(B)タイミングベルトの歯の形状寸法
(C)タイミングベルトの弾性率
がある。
ところで、本願各発明の先行技術として特許文献2がある。この特許文献2には、OHT用台車におけるタイミングベルトの駆動機構の一環として、歯部を有するタイミングベルト11と、その基端部の巻取り・繰出しを行うローラ20と、タイミングベルト11の歯と噛合う歯を備え、タイミングベルト11を前記巻取りローラ20内から繰出しあるいはこの巻取りローラ20に巻込む方向に駆動するタイミングプーリ12とが開示されている。
Parameters that induce such tooth skipping, and thus hunting, include (A) timing pulley tooth geometry (B) timing belt tooth geometry (C) timing belt elastic modulus.
Incidentally, there is
そして、特許文献2に係る発明とは直接関係しないものの、タイミングベルト11及びタイミングプーリ12における各歯同士の噛み合いの歯飛び防止の一環として、タイミングベルト11をタイミングプーリ12に押し当てるピンチローラ13、14、及びタイミングベルト11の幅方向の振れを防止するガイドローラ15が開示されている。
さらに、特許文献2には、被搬送物の昇降時の制御手段として、タイミングプーリ12と巻取りローラ20との間でタイミングベルト11の弛みが発生すると、振動が発生し易くなると共に被搬送物の懸吊姿勢のバランスが崩れ易くなることを考慮した技術が開示されている。
And although not directly related to the invention according to
Further, in
具体的に述べると、巻取りローラ20の周速がタイミングプーリ12の周速よりも大きくなるように回転駆動力を巻取りローラ20に付与すると共に、滑りクラッチ21により回転駆動力を制限及び遮断可能にする。次いで、タイミングベルト11の巻取り時(被搬送物の上昇時)においては、タイミングベルト11をタイミングプーリ12の送出し速度よりも高速で巻取りローラ20に巻取ることによって、巻取りローラ20及びタイミングプーリ12間に張力を持たせながら巻取りを行い、張力が所定値以上に増大する場合には滑りクラッチ21により回転駆動力を制限することによって、所定値以下に制限された張力によりタイミングベルト11の弛みの発生を防止している。
一方、巻き戻し時(被搬送物の下降時)においては、滑りクラッチ21における回転駆動力伝達を遮断し、巻取りローラ20を回転自在にしてタイミングプーリ12に従動した状態にすることによってタイミングベルト11に張力を発生させてその弛みの発生を防止している。
More specifically, the rotational driving force is applied to the
On the other hand, at the time of rewinding (when the object to be transported is lowered), the transmission of the rotational driving force in the
前記特許文献2に開示されているタイミングベルト及びタイミングプーリの各歯部の噛み合わせ部位において発生する歯飛びを防止する手段として、前記タイミングプーリに対してタイミングベルトを圧接させるピンチローラ及びタイミングベルトの幅方向の変位を抑制するガイドローラの開示がある。
しかし、これらのピンチローラ及びガイドローラはタイミングベルト及びタイミングプーリの各歯部の噛合わせ部位の歯飛びの防止効果はあるものの、十分ではない。
一方、従来のタイミングベルト及びタイミングプーリの各歯部の噛合わせ部位はその展開模式図としての図5に示すように、タイミングベルト50及びタイミングプーリ51において、各歯部50a、51a同士がタイトに噛合わされる慣用手段を用いていた。
As means for preventing tooth skipping occurring at the meshed portions of the timing belt and timing pulley disclosed in
However, although these pinch rollers and guide rollers have an effect of preventing tooth skipping at the meshing portions of the timing belt and the timing pulley, they are not sufficient.
On the other hand, as shown in FIG. 5 as a developed schematic view, the meshing portions of the tooth portions of the conventional timing belt and timing pulley are tight in the
このようなタイトの噛合わせにあっては、前記歯飛びの要因となるパラメータ(A)(B)(C)が考慮されていないため、OHT用台車において、被搬送物を昇降するに際して、例えば、予測されない振動が発生し、歯飛びを起こし始めると、前記各歯部50a、51aの噛合い部位においてクリアランスがない箇所が発生すると、正常状態への復帰力が弱い。
従って、歯飛びはその発生箇所から波及し、1ピッチずれた状態でタイミングベルト及びタイミングプーリの各歯部同士が噛合うことになり、歯飛びを生じない他のタイミングベルトとで懸吊される被搬送物は正常な姿勢を維持できず、被搬送物が例えば、ウエハを収納したキャリアである場合、ウエハの品質低下を招くことがあり、極端な場合OHT用台車にて懸吊状態の被搬送物が落下する恐れがある。
In such tight meshing, the parameters (A), (B), and (C) that cause the tooth skipping are not taken into consideration, so when raising and lowering the object to be conveyed in the OHT carriage, for example, When an unexpected vibration occurs and tooth skipping starts, if there is a portion where there is no clearance in the meshing portions of the tooth portions 50a and 51a, the restoring force to the normal state is weak.
Therefore, tooth skipping spreads from the place where the tooth jump occurs, and the tooth portions of the timing belt and the timing pulley mesh with each other with a shift of one pitch, and are suspended by other timing belts that do not cause tooth skipping. If the object to be conveyed cannot maintain a normal posture and the object to be conveyed is, for example, a carrier containing a wafer, the quality of the wafer may be deteriorated. In an extreme case, the object to be suspended is suspended by an OHT carriage. There is a risk of transported items falling.
そこで、本発明の目的は、前記(A)タイミングプーリの歯の形状寸法、(B)タイミングベルトの歯の形状寸法、(C)タイミングベルトの弾性率を考慮に入れたタイミングプーリ及びタイミングベルトの各歯部の噛合い部位のクリアランスを定め、原理的に歯飛びが起こらない、或いは歯飛びが起きたとしても発生初期の段階で正常に復帰できるようにし、歯飛びを未然に防止することにある。 Accordingly, an object of the present invention is to provide a timing pulley and a timing belt in consideration of (A) timing pulley tooth geometry, (B) timing belt tooth geometry, and (C) timing belt elasticity. In order to prevent tooth skipping by setting the clearance of the meshing part of each tooth part so that, in principle, tooth skipping does not occur or even if tooth skipping occurs, it can be restored to normal at the initial stage of occurrence. is there.
上記の課題を解決するため、請求項1に記載のOHT用台車における被搬送物の昇降機構は、帯状をなし、その一面において、長手方向に沿って歯部を形成し、被搬送物把持用ハンド部を下端部で支持する複数本のタイミングベルトと、各タイミングベルト毎に、その歯部と噛合い、当該タイミングベルトによって懸吊される前記ハンド部を昇降制御するタイミングプーリと、当該各タイミングプーリの駆動制御により、各対応する前記タイミングベルトを巻取り、又は繰出しする巻取りローラとを有する懸垂式昇降搬送装置用台車における被搬送物の昇降機構において、前記タイミングベルト及び前記タイミングプーリの各歯部同士の噛合い状態が、被搬送物搭載の有無に対応した負荷荷重の有無により前記タイミングベルトの弾性伸縮に起因して変動するタイミングベルトの歯ピッチと、弾性伸縮を生じない前記タイミングプーリの歯ピッチとにズレが生じても、前記タイミングベルトの歯幅寸法と前記タイミングプーリの歯幅寸法の最適化を図ることにより、噛合わせ不良を生じることなく、かつ、所定の噛合い強度を保つように構成した。 In order to solve the above-mentioned problem, the lift mechanism of the transported object in the OHT cart according to claim 1 has a belt-like shape, and on one surface thereof, a tooth portion is formed along the longitudinal direction for gripping the transported object. A plurality of timing belts that support the hand part at the lower end part, a timing pulley that meshes with each tooth part of each timing belt and controls the hand part suspended by the timing belt, and each timing In the lifting mechanism of the object to be transported in the carriage for the lifting type lifting and lowering conveying device having a winding roller for winding or feeding each corresponding timing belt by driving control of the pulley, each of the timing belt and the timing pulley The meshing state of the tooth parts is due to the elastic expansion and contraction of the timing belt depending on the presence or absence of a load corresponding to the presence or absence of the loaded object. Therefore, even if the tooth pitch of the timing belt that fluctuates and the tooth pitch of the timing pulley that does not cause elastic expansion / contraction are displaced, the tooth width dimension of the timing belt and the tooth width dimension of the timing pulley are optimized. By doing so, it is configured to maintain a predetermined meshing strength without causing a meshing failure.
この請求項1に係る発明によれば、OHT用台車のハンド部における被搬送物の把持の有無によってタイミングベルトの弾性伸縮が発生しても、これを考慮のうえ、さらにタイミングベルト及びタイミングプーリの各歯部同士の噛合い状態が所定の強度を保つ範囲にてクリアランスを大きく取れるようにタイミングベルト及びタイミングプーリの各歯部を形成することにより各歯部の噛合い部位における歯飛びを防止できる。
即ち、前記各歯部同士の噛合い部において振動ほかの要因にて歯飛びが発生し始めた段階で、従来の慣用手段のように前記歯部同士の噛合い状態がクリアランスの殆どないタイトの状態では、タイミングベルトの伸縮に伴い、クリアランスが無くなり、歯飛びに移行するのに比べて、本願請求項1の発明の構成では歯飛びを抑制する方向に移行する。
According to the first aspect of the present invention, even if the timing belt elastically expands and contracts due to the presence or absence of gripping of the object to be conveyed in the hand portion of the OHT carriage, the timing belt and the timing pulley are further taken into consideration. By forming each tooth portion of the timing belt and the timing pulley so that the clearance can be increased within a range in which the meshing state between the tooth portions maintains a predetermined strength, tooth skipping at the meshing portion of each tooth portion can be prevented. .
That is, at the stage where tooth skipping starts to occur due to vibration and other factors at the meshing portions of the tooth portions, the meshing state of the tooth portions is tight with little clearance as in the conventional means. In the state, with the expansion and contraction of the timing belt, the clearance disappears, and the configuration of the invention of claim 1 of the present application shifts in the direction of suppressing the tooth skip as compared with the shift to the tooth skip.
請求項2に記載のOHT用台車における被搬送物の昇降機構は、請求項1に記載のOHT用台車における被搬送物の昇降機構において、前記各タイミングプーリの近傍であって、当該タイミングプーリと、被搬送物相互間、当該タイミングプーリと、これに対応する巻取りローラ相互間の夫々に位置し、前記タイミングベルトの幅方向の変位を防止させるガイドローラを備えるように構成した。
この請求項2に係る発明によれば、引用元の請求項1に係る発明の効果に加えて、タイミングローラの近傍に位置するタイミングベルトの幅方向の変位を抑制できるためタイミングベルト及びタイミングプーリの各歯部の噛合い部位における歯飛び防止効果を増すことができる。
The lift mechanism of the transported object in the OHT cart according to
According to the second aspect of the present invention, in addition to the effect of the first aspect of the present invention, the displacement of the timing belt located in the vicinity of the timing roller in the width direction can be suppressed. It is possible to increase the effect of preventing tooth skipping at the meshing portion of each tooth portion.
請求項3に記載のOHT用台車における被搬送物の昇降機構は、請求項1又は2に記載のOHT用台車における被搬送物の昇降機構において、前記各タイミングプーリ及びこれに対応するタイミングベルトの各歯部が噛合う1至複数箇所において、タイミングベルトの歯部を形成していない箇所をタイミングプーリ方向に押し当てるピンチローラを備える構成とした。
この請求項3に係る発明によれば、引用元の請求項1又は2に係る発明の効果に加えて、タイミングベルトの歯飛び抑制効果をさらに向上させることができる。
即ち、ピンチローラは被搬送物を上昇させる時、タイミングベルトに衝撃的、瞬間的に加わる慣性重力がタイミングベルト歯部に伝播するのを遮断、緩和する効果を有する。
The lift mechanism of the transported object in the OHT cart according to claim 3 is the lift mechanism of the transported object in the OHT cart according to
According to the invention according to claim 3, in addition to the effect of the invention according to
That is, the pinch roller has an effect of blocking and mitigating the momentary inertial momentarily applied to the timing belt when propelling the conveyed object, and propagating to the timing belt teeth.
請求項4に記載のOHT用台車における被搬送物の昇降機構は、請求項1乃至3のいずれかに記載のOHT用台車における被搬送物の昇降機構において、タイミングベルトの本数を4とする構成とした。
この請求項4に係る発明によれば、引用元の請求項1乃至3に係る発明の効果に加えて、全てのタイミングプーリにおける同期運転機構の組立てが容易で、被搬送物を把持するハンド部を安定状態にて懸吊することができる。
The lift mechanism of the transported object in the OHT cart according to
According to the invention according to
請求項5に記載のOHT用台車における被搬送物の昇降機構は、請求項1乃至4のいずれかに記載のOHT用台車における被搬送物の昇降機構において、各タイミングプーリと、これに対応する巻取りローラとの間のタイミングベルトの張力を所定の範囲内において一定に保つ制御手段を備えることを特徴とする。
この請求項5に係る発明によれば、引用元の請求項1乃至4に係る発明の効果に加えて各タイミングプーリと、これに対応する巻取りローラとの間のタイミングベルトの弛みとこれに伴う振動の発生を防止できるためタイミングベルトの歯飛び抑制効果をさらに向上させることができる。
The lift mechanism of the transported object in the OHT cart according to
According to the invention of
請求項6に記載のOHT用台車における被搬送物の昇降機構は、請求項1乃至5のいずれかに記載のOHT用台車における被搬送物の昇降機構において、各タイミングベルトに対してハンド部への動力発生用電力乃至制御信号供給に必要な電線が埋設されていることを特徴とする。
この請求項6に係る発明によれば、引用元の請求項1又は5に係る発明の効果に加えてOHT用台車本体と被搬送物把持用ハンド部との電力・信号の授受に必要な概ね3mに及ぶ電線を別途設ける必要がなく、配線の簡素化を図ることができる。
因みに、タイミングベルトに埋設する電線の代りに別途電線を配する構成とすると、電線に伸縮機構を別途設ける必要が生じ構成の複雑化を来す。
The lift mechanism of the transported object in the OHT cart according to
According to the invention according to
Incidentally, if the electric wire is separately arranged instead of the electric wire embedded in the timing belt, it becomes necessary to separately provide an expansion / contraction mechanism for the electric wire, resulting in a complicated structure.
以下、本発明の好適な実施の形態について図面を参照しつつ説明する。
先ず、図面の概要を述べると、図1は本発明に係るOHT用台車の要部構成を示す正面図、図2はOHT用台車のハンド部における昇降機構を平面視した概略構成図、図3は本発明の要部構成を示す概略構成図、図4はタイミングベルト及びタイミングプーリの各歯部の噛合わせ部位(図3における領域M部)における展開模式図で、同図(A)はタイミングベルトの張力が最大時(長さが最大)、同図(B)はタイミングベルトの張力が最小時(長さが最小)の状況を示す。図5は慣用手段としてのタイミングベルト及びタイミングプーリの各歯部の噛合わせ部位(図3における領域M部)における展開模式図、図6は本発明の実施例におけるタイミングプーリ及びタイミングベルトの寸法表示を付した模式図で同図(A)はタイミングベルトの寸法表示、同図(B)はタイミングプーリの寸法表示である。図7は本発明の実施例における被搬送物の荷重とタイミングベルトの関係を示す特性図である。
Hereinafter, preferred embodiments of the present invention will be described with reference to the drawings.
First, the outline of the drawings will be described. FIG. 1 is a front view showing the configuration of the main part of the OHT cart according to the present invention, FIG. 2 is a schematic configuration diagram of the lifting mechanism in the hand portion of the OHT cart, and FIG. FIG. 4 is a schematic configuration diagram showing a main part configuration of the present invention, FIG. 4 is a developed schematic view in a meshing portion (region M portion in FIG. 3) of each tooth portion of the timing belt and the timing pulley, and FIG. When the belt tension is maximum (maximum length), FIG. 5B shows the situation when the tension of the timing belt is minimum (length is minimum). FIG. 5 is a developed schematic view of the meshing portion (region M in FIG. 3) of each tooth portion of the timing belt and timing pulley as conventional means, and FIG. 6 is a dimension display of the timing pulley and timing belt in the embodiment of the present invention. (A) is a dimension display of a timing belt, and (B) is a dimension display of a timing pulley. FIG. 7 is a characteristic diagram showing the relationship between the load of the conveyed object and the timing belt in the embodiment of the present invention.
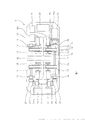
さて、図1に示されるようにOHT用台車1は、天井における所定の軌道に沿って設けられた走行レール2に吊り下げられている。そして、このOHT用台車1は、その案内・駆動部3において、図示しない走行輪と案内輪とで走行レール2に規制されて走行する。この際、必要とされる動力は、走行輪に駆動モータを備えること、或いはレール2側とOHT用台車1側に夫々2次側、1次側を設ける直流リニアモータを備えること等周知の手段によって得られる。4は位置合せ機構で、後述する被搬送物の前記走行レール2におけるOHT用台車の走行方向と直交する方向及び回転方向の変位調整を図る。5はタイミングベルトで、前後左右に4本設けられ、OHT用台車1内に備えられる昇降機構6(詳細は後述)により伸縮自在に制御され、ハンド部7を昇降させるように構成される。そして、このタイミングベルト5は、内部にハンド部7への電力供給、及び制御信号の授受用の電線(図示せず)を埋設している。
As shown in FIG. 1, the OHT carriage 1 is suspended from a traveling
7aはグリッパ部材で、ハンド部7の構成要素の一つであって、図示の左右方向に変位可能に支持されている。8は被搬送物で、具体的例として、洗浄、CVDほかの各種処理において未処理あるいは処理済のウエハを収納したキャリア本体8aと、前記クリッパ部材7aによって把持又は把持の解除を受けるフランジ部8bから構成される。
Reference numeral 7a denotes a gripper member, which is one of the components of the
次に、前記昇降機構6の具体的構成について図2を基に説明する。図2において、昇降機構6は、略長方体形状に形成された収容枠体11と、当該収容枠体11に収容された4台の懸吊モジュール12とを有している。各懸吊モジュール12は、ハンド部7を介して被搬送物8を懸吊するタイミングベルト5と、当該タイミングベルト5を巻戻し及び巻取る巻取ドラム13と、タイミングベルト5を巻戻し方向及び及び巻取り方向に送り出すタイミングプーリ14と、巻取ドラム13を巻戻し方向及び巻取り方向に切替え可能に回転駆動するDCモータからなるドラム駆動モータ15とを有している。
Next, a specific configuration of the
次に各懸吊モジュール12の詳細構造について説明する。各懸吊モジュール12のドラム駆動モータ15は駆動軸15aの軸芯が収容枠体11の長手方向に一致するように配置されている。ドラム駆動モータ15の駆動軸15aは、巻取ドラム13の中心部を貫設されている。また、駆動軸15aの先端部は軸受け部材16により回転自在に支持されている。そして、ドラム駆動モータ15は巻取ドラム13を巻戻し方向及び巻取り方向に切り換え可能に任意の駆動力で回転駆動するようになっている。
Next, the detailed structure of each
前記タイミングベルト5はタイミングプーリ14の周囲に沿って湾曲状に曲折されて垂下された後、他端部がハンド部7(図1参照)に連結されている。タイミングプーリ14は、ハンド部7と巻取ドラム13との中間位置において巻取ドラム13の側方に並列配置されている。タイミングプーリ14及びタイミングベルト5には、後述する歯が夫々設けられている。そしてタイミングプーリ14及びタイミングベルト5は各歯同士を噛合わせることによって、通常操作時には、滑りのない確実なベルト搬送を実現している。
The
上記のように構成された懸吊モジュール12は、図1に示すハンド部7を安定して懸吊するように、ハンド部7の上面形状(長方形状)の四隅に対応した位置に配置されている。即ち、懸吊モジュール12は、収容枠体11の長手方向及び幅方向に2行2列の状態で配列されると共に、2行2列の配列中心に対して点対称に設けられている。また、収容枠体11の長手方向に並列配置された2台の懸吊モジュール12・12は、タイミングプーリ14・14の回転中心が同芯となるように設定されている。一方側の懸吊モジュール12・12におけるタイミングプーリ14・14の回転中心には、第1プーリ駆動軸17が貫設されている。また、他方側の懸吊モジュール12・12におけるタイミングプーリ14・14の回転中心には、第2プーリ駆動軸18が貫設されている。これらのプーリ駆動軸17・18は、軸受けベアリングユニット19により回転自在に支持されている。
The
前記両プーリ駆動軸17・18の一方端には、傘歯車20・20が設けられている。また、両プーリ駆動軸17・18の一方端側には、第3プーリ駆動軸21が配置されている。この第3プーリ駆動軸21は、両プーリ駆動軸17・18に対して直交するように設定されている。第3プーリ駆動軸21は、軸受けベアリングユニット19により回転自在に支持されている。また、第3プーリ駆動軸21の両端部には、傘歯車20・20が設けられている。そして、第3プーリ駆動軸21の傘歯車20・20は、前記第1及び第2プーリ駆動軸17・18の一方端に設けられた傘歯車20・20と夫々噛合されている。これにより、各懸吊モジュール12のタイミングプーリ14は、第1〜第3プーリ駆動軸17・18・21により連結された状態になっている。
Bevel gears 20 and 20 are provided at one ends of the
前記第1プーリ駆動軸17の他方端には、昇降モータ22が連結されている。この昇降モータ22はサーボモータからなっており、昇降モータ制御装置23により回転方向及び回転速度をフィードバック制御可能にされている。一方、前記ドラム駆動モータ15はDCモータからなっており、ドラム駆動モータ制御装置24により回転方向及び回転速度を制御可能にされている。なお、ドラム駆動モータ15にDCモータを用いる理由は、DCモータの基本特性として駆動電圧の電圧及び電流を制御することによって、回転速度をタイミングプーリ14の回転速度(昇降モータ22の回転速度)に一致させ、且つタイミングプーリ14と巻取ドラム13との間のタイミングベルト5に発生する張力を所定範囲内の一定値となるように制御できるからである。そして、これらの両モータ制御装置23・24はタイミングベルト5の巻取り時においては巻取ドラム13の周速をタイミングプーリ14の周速よりも増大させる一方、タイミングベルト5の巻戻し時においては巻取ドラム13の周速をタイミングプーリ14の周速よりも低下させるように制御する。
A lifting
前記図1、図2に示す構成は本願各発明の適用の1具体例を示すもので、その作用を説明すると次の通りである。
先ず、メインコントローラ(図示せず)からの搬送指令信号がOHT用台車の制御部に受信されると、搬送指令信号に含まれる信号内容が読み取られる。具体的には、搬送指令信号の信号内容に基づいて、搬送先となる処理装置(図示せず)の指定場所が認識されこの指定場所(走行位置データ)に到達するための走行ルートが決定される。
The configuration shown in FIG. 1 and FIG. 2 shows one specific example of application of each invention of the present application, and its operation will be described as follows.
First, when a transport command signal from a main controller (not shown) is received by the control unit of the OHT carriage, the signal content included in the transport command signal is read. Specifically, based on the signal content of the conveyance command signal, a designated location of a processing device (not shown) as a conveyance destination is recognized, and a travel route for reaching this designated location (travel position data) is determined. The
その後、OHT用台車1は図示しないリニアモータを構成する二次側コイルに3相交流電流を流すことにより移動する進行磁界を発生させ、搬送軌道に敷設された二次側永久磁石(図示せず)の永久磁石との間の磁気作用で発生した推進力により走行を開始する。走行時においては、搬送軌道中に設けられたバーコード表示等による軌道位置データに基づいて走行ルートを確認する。指定場所に到達するとOHT用台車1の位置を予めティーチングにより記憶させた補正データを用い、微調整した後、指定場所に存在する処理装置に対して被搬送物8の脱着処理を行う。
Thereafter, the OHT carriage 1 generates a traveling magnetic field by passing a three-phase alternating current through a secondary coil constituting a linear motor (not shown), and a secondary permanent magnet (not shown) laid on the transport track. ) Starts running with the propulsive force generated by the magnetic action with the permanent magnet. During travel, the travel route is confirmed based on the track position data by bar code display or the like provided in the transport track. When the designated location is reached, the position of the OHT carriage 1 is finely adjusted using the correction data stored in advance by teaching, and then the removal of the transported
被搬送物8を処理装置に装着(タイミングベルト5の下降)する場合には、昇降モータ制御装置23が昇降モータ22を巻戻し方向に所定の回転速度で回転するようにフィードバック制御する、これにより、昇降モータ22に連結された第1プーリ駆動軸17が巻戻し方向に回転し、この第1プーリ駆動軸17に傘歯車20の噛合により連結状態にされた第3プーリ駆動軸21及び第2プーリ駆動軸18が同方向に回転する。この結果、第1プーリ駆動軸17及び第2プーリ駆動軸18が貫設された各懸吊モジュール12のタイミングプーリ14が巻戻し方向に同時に回転を開始する。
When the transported
また、昇降モータ制御装置23による昇降モータ22の回転とは別に、各ドラム駆動モータ制御装置24が各懸吊モジュール12のドラム駆動モータ15に所定の電圧及び電流を出力し、ドラム駆動モータ15を巻戻し方向に回転させる。これにより、ドラム駆動モータ15が駆動軸15aを介して巻取ドラム13を巻戻し方向に回転し、タイミングベルト5が巻取ドラム13から巻戻される。この際、ドラム駆動モータ制御装置24は駆動電源の電圧及び電流を制御することによってタイミングプーリ14及び巻取ドラム13間のタイミングベルト5に発生する張力を所定範囲内の一定に制御している。
In addition to the rotation of the lifting
この結果、全懸吊モジュール12のタイミングベルト5が同一速度で巻取ドラム13から巻き戻されるため、タイミングベルト5に懸吊されたハンド部7が水平状態を維持しながら下降する。これにより、被搬送物8の傾きが防止されるため、被搬送物8内のウエハ等の収納物がズレて滑ったり、被搬送物8の側壁に突き当たることによる製品の歩留りの低下が防止される。
As a result, the
さらに、下降時において、巻取ドラム13及びタイミングプーリ14間のタイミングベルト5の張力が所定範囲内に設定されているので巻取ドラム13をタイミングプーリ14に従動させながら弱い張力で下降させた場合のように、タイミングベルト5がタイミングプーリ14から浮き上がって噛合いを外すことはない。これにより、タイミングベルト5とタイミングプーリ14とが確実に噛合せた状態を維持するため、被搬送物8がバランスを崩して落下するという事故を防止することができる。また、タイミングベルト5が所定範囲の張力で張られているため、タイミングベルト5が早期に破損や磨耗するという事態を防止することができる。
Further, when the lowering is performed, since the tension of the
次に、被搬送物8が下降され、処理装置の所定位置に載置されると、この載置状態が図示しない載置検知センサにより検出される。そして、被搬送物8の下降が停止された後、ハンド部7による被搬送物8の保持が解除される。この後、ハンド部7のみが引き上げられることによって被搬送物8の装着が完了する。
Next, when the transported
一方、被搬送物8を処理装置から抜脱(タイミングベルト5の上昇)する場合には、先ず、前記下降動作を実行するように昇降機構6が作動され、空状態のハンド部7がタイミングベルト5に懸吊されながら被搬送物8方向に下降される。従って、この場合においても、所定範囲内の張力下で、タイミングベルト5がタイミングプーリ14に噛合されるため、通常の状態においては、噛合が外れるという事態が起きる可能性は少ない。この後、ハンド部7が被搬送物8のフランジ部8bに到達したことが図示しない載置検知センサで検出されると、ハンド部7の下降が停止された後、ハンド部7によりフランジ部8bが保持される。
On the other hand, when the transported
次に、図1及び図2に示すように、昇降モータ制御装置23が昇降モータ22を巻取り方向に所定の回転速度で回転するようにフィードバック制御する。これにより、昇降モータ22に連結された第1〜第3プーリ駆動軸17・21・18が順次回転方向を変えて回転する。この結果、第1プーリ駆動軸17及び第2プーリ駆動軸18を貫設させた各懸吊モジュール12のタイミングプーリ14が巻取り方向に同時に回転を開始する。
Next, as shown in FIGS. 1 and 2, the lifting
また、昇降モータ制御装置23による昇降モータ22の回転とは別に、各ドラム駆動モータ制御装置24が各懸吊モジュール12のドラム駆動モータ15に所定の電圧及び電流を出力し、ドラム駆動モータ15を巻取り方向に回転させる。これにより、ドラム駆動モータ15がその駆動軸15aを介して巻取ドラム13を巻取り方向に回転させることによって、タイミングベルト5が巻取ドラム13に巻取られる。そして、前記被搬送物8を下降させる場合と同様に、ドラム駆動モータ制御装置24は、駆動電源の電圧及び電流を制御することによってタイミングプーリ14及び巻取ドラム13間のタイミングベルト5に発生する張力を所定範囲内の一定値に制御する。
In addition to the rotation of the lifting
図3は、被搬送物8の把持及びこの把持を解除するハンド部7全体機構を示す図2の本願各発明に係る構成の要部を抽出し、付属要素を追記した概略構成図である。この図3において、図2に表示した構成要素(懸吊モジュール12内のタイミングベルト5、タイミングプーリ14及び巻取ドラム13)の相互関係について具体的に述べると次の通りである。
先ず、タイミングプーリ14及びタイミングベルト5には、互いの接触部位の相対位置における滑りを防止するために、タイミングプーリ14の周囲には歯部14aが形成され、タイミングベルト5には前記タイミングプーリの歯部14aと噛合う歯部5aが形成されている。次に、巻取ドラム13の構成について述べると、タイミングベルト5を巻取る円筒部13a、巻取られたタイミングベルト5の幅方向の変位を防止する鍔部13b、及び
固定部13cを備えている。
FIG. 3 is a schematic configuration diagram in which a main part of the configuration according to each invention of FIG. 2 showing the gripping of the object to be conveyed 8 and the entire mechanism of the
First, the timing
A fixing
なお、この固定部13cは、円筒部13aに巻取り・巻戻しされるタイミングベルト5の端部5bを確実に保持するために円筒部13aの内部に設けられている。
31、32はピンチローラで、タイミングベルト5及びタイミングプーリ14の各歯部
5a、14aの噛合い部位において、タイミングベルト5の背面(歯部5aが形成されていない面)を押圧しつつ回動自在に支持されている。
これによって、少なくともピンチローラ31、32間のM部に於いて、タイミングベルトは張力の加わった状態でタイミングプーリに巻架され、、しかも背面の2箇所をピンチローラで押圧されるので、ピンチローラの歯にタイミングベルトの歯が密着し、タイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位において歯飛びの発生の可能性は少ない。
In addition, this fixing | fixed
As a result, at least in the M section between the
33、34はガイドローラで、タイミングベルト5の背面に筒部33a、34aを接し、タイミングベルト5の幅方向の変位を鍔部33b、34bで抑制し、配置位置はタイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位の近傍とする。
これによって、タイミングベルト5の反巻取ドラム13側であって、ハンド部7側の端部におけるタイミングベルトの幅方向の振れが発生した場合、タイミングプーリ14の歯部14aに対するタイミングベルト5の歯部5aの噛合いが傾斜することに伴い発生する可能性のある歯飛びを抑制できる。
Accordingly, when the
前記の説明における、
(1) 巻取ドラム13及びタイミングプーリ14間のタイミングベルト5に所定範囲
内で一定張力を加えること
(2) ピンチローラ31、32を設けること
(3) ガイドローラ33、34を設けること
は、タイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位の歯飛び発生の抑制効果を有する。
In the above description,
(1) Applying a constant tension within a predetermined range to the
前記(1)〜(3)の構成は、被搬送物8の昇降時に発生することが予測される振動や衝撃力がタイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位に伝播するのを遮断し、歯飛び発生防止の効果もある。
しかし、タイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位において、従来のクリアランスが最小限で、タイトな噛合わせであると、剛性大につき歯ピッチの変動のないタイミングプーリ14の歯部14aと、弾性体で形成されることに伴い、被搬送物8の有無により歯部ピッチに変動のあるタイミングベルト5の歯部5aとの噛合い状態が変化し、最適状態を維持できない。
In the configurations (1) to (3), vibrations and impact forces that are expected to occur when the conveyed
However, when the conventional clearance is minimal and tight meshing is performed at the meshing portions of the
即ち、歯部ピッチが変動しないタイミングプーリ14の歯部14aと、歯部ピッチが変動するタイミングベルト5の歯部5aとは、ハンド部7が被搬送物8を把持しない状態(ハンド部7が無負荷状態)におけるハンド部7の降下時の最も負荷の小さい状態から、ハンド部7が被搬送物8を把持している状態(ハンド部7が負荷状態)におけるハンド部7の上昇時の最も負荷のかかる状態に至るまで適切なクリアランスを維持できず、歯飛びを生じることがある。
That is, the
さて、この歯飛びを的確に防止する本願各発明の要旨をなす構成について図4(展開模式図)を参照して説明する。
先ず、タイミングプーリ14が剛体で形成されていることにより、当該タイミングプーリ14の歯部14aの歯ピッチが一定であるのに対して、タイミングベルト5は、巻取ドラム14に巻取り・繰出しされるため弾性体で形成される。このため、タイミングベルト5に最大張力が負荷されるハンド部7に対して被搬送物8を把持して上昇するときに最大長となり、ハンド部7に被搬送物8を把持しない状態で降下する時に最小長となる。
このようにタイミングベルト5が最大長となるときのタイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位の適正な状態は図4(A)の関係にあることが望ましい。
即ち、ピンチローラ31、32間のタイミングベルト5とタイミングプーリ14とが噛合うM部の中央部において、タイミングプーリ14の歯部14aと、タイミングプーリ14の各歯部5a間に形成されるクリアランス寸法G1は通常の寸法(従来慣用されているクリアランス)であり、両端部に於いて形成されるタイミングプーリ14の歯部14aと、タイミングプーリ14の各歯部5a間のクリアランスG2は最大となる。
Now, a configuration constituting the gist of each invention of the present application for accurately preventing tooth skipping will be described with reference to FIG. 4 (development schematic diagram).
First, since the timing
As described above, it is desirable that the proper state of the meshed portions of the
That is, the clearance formed between the
一方、タイミングベルト5が最小長となるときのタイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位の適正な状態は図4(B)の関係にあることが望ましい。
即ち、ピンチローラ31、32間のタイミングベルト5とタイミングプーリ14とが噛合うM部の中央部において、タイミングプーリ14の歯部14aと、タイミングプーリ14の各歯部5a間に形成されるクリアランスG1は図4(A)と同様通常の寸法であるが、両端部に於いて形成されるタイミングプーリ14の歯部14aと、タイミングプーリ14の各歯部5a間のクリアランスG2は最小となる。
この図4(A)、(B)のようにタイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部位の最適化を図るための手法は、
(1) タイミングベルト5及びタイミングプーリ14の各歯部5a、14aの噛合い部の
長さ(図3よりこの長さはM)
(2) タイミングベルト5の弾性率(単位重量当りの伸び率をEとする)
(3) タイミングベルト5に作用する負荷荷重変動量W(最大負荷荷重−最小負荷荷重)
とする。
On the other hand, it is desirable that the proper state of the meshing portions of the
That is, the clearance formed between the
As shown in FIGS. 4 (A) and 4 (B), the method for optimizing the meshing portions of the
(1) The length of the meshing portions of the
(2) Elastic modulus of the timing belt 5 (Elongation per unit weight is E)
(3) Load load fluctuation amount W acting on the timing belt 5 (maximum load load−minimum load load)
And
この場合において、歯飛びの起こらない条件はクリアランスG1、G2が次式1、2を満たす場合である。
0≦G1<0.4mm・・・・・・・・・・・(式1)
M×E×W≦G2<M×E×W+G1・・・・(式2)
また、クリアランスG1、G2が必要以上に大きな寸法になると歯部の強度が不足し、十分な耐寿命特性が得られなくなり、しかも、タイミングベルトの昇降動作でタイミングベルトに滑りが生じるなど動作が不安定になる。前記(式1)、(式2)は歯部の強度が十分な耐寿命特性を有し、昇降動作の安定性も確保できるものである。
なお、理論上、前記クリアランスG1は、タイミングベルト5に対し、被搬送物8の荷重が負荷される図4(B)の状態の方が被搬送物8の荷重が負荷されない図4(A)の状態より大となるが、負荷荷重によるタイミングベルト5全体の伸びに比べて1ピッチの伸びが関与するのみで、実質同じとしても前記式1、2への影響は殆どない範囲である。
In this case, the condition that the tooth skip does not occur is when the clearances G1 and G2 satisfy the following
0 ≦ G1 <0.4mm ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ (Formula 1)
M × E × W ≦ G2 <M × E × W + G1 (Expression 2)
In addition, if the clearances G1 and G2 are larger than necessary, the strength of the tooth portion is insufficient, and sufficient life resistance characteristics cannot be obtained. Become stable. The above (Formula 1) and (Formula 2) have a life resistance characteristic that the strength of the tooth portion is sufficient, and can ensure the stability of the lifting operation.
Theoretically, the clearance G1 is such that the load of the conveyed
タイミングベルト5の本数は、被搬送物8の安定した昇降・搬送を得るとともに、各タイミングベルト5の駆動機構を簡素するために4が最適であるが、原理的には複数本にて構成することができる。
The number of
図6((A)はタイミングベルト、(B)はタイミングプーリ)の寸法表示図において、具体的数値を示すと、
L1:0.35mm
L2:1.1mm
L3:0.85mm
L4:2mm
L5:1.1mm
L6:0.85mm
L7:0.7mm
H1:0.65mm
H2:0.5mm
D:29.60mm
T:0.65mm
である。
また、前記式1、2の要素ほか実施データとして具体的数値を示すと、
G1:約0.2mm
E:約5.5×10−4(mm/kg)
M:約60mm
W:約4Kg
タイミングベルト5の幅:約25mm
タイミングベルト5及びタイミングプーリ14の歯ピッチ:2mm
タイミングベルト5の実施可能長さ:300〜5,000mm
である。
In the dimension display diagram of FIG. 6 ((A) is a timing belt, (B) is a timing pulley)
L1: 0.35mm
L2: 1.1mm
L3: 0.85mm
L4: 2mm
L5: 1.1mm
L6: 0.85mm
L7: 0.7mm
H1: 0.65mm
H2: 0.5mm
D: 29.60mm
T: 0.65mm
It is.
In addition, when concrete numerical values are shown as the implementation data other than the elements of the
G1: About 0.2mm
E: About 5.5 × 10 −4 (mm / kg)
M: About 60mm
W: About 4Kg
Timing
Teeth pitch of
Possible length of the timing belt 5: 300 to 5,000 mm
It is.
なお、この実施例におけるタイミングベルト5の駆動部6の底部とハンド部7の固定部までの長さは2500、傾斜角度は最大0.28度とした。
図7は、この実施例におけるタイミングベルトの荷重W(単位はkg)に対する長さL(単位はmm)との関係を示すグラフである。
この実施例によってタイミングベルト5とタイミングプーリ14の各歯部5a、14aとの噛合い状態において歯飛びは発生しないことを確認した。
タイミングベルト幅寸方が10mm〜50mmの範囲で、伸び率Eが5.0×10−4(mm/kg)〜5.0×10−6(mm/kg)の範囲にある場合、G1の適正値は0.5mm以下、好ましくは0.2mm以下、さらに好ましくは0.1mm以下である。
以上に記載のデータは本願各発明の一具体例を示したもので、各請求項にて規制される技術的範囲を限定するものではない。
In this embodiment, the length from the bottom of the
FIG. 7 is a graph showing the relationship between the timing belt load W (unit is kg) and the length L (unit is mm) in this embodiment.
According to this embodiment, it was confirmed that tooth skipping did not occur when the
When the width of the timing belt is in the range of 10 mm to 50 mm and the elongation E is in the range of 5.0 × 10 −4 (mm / kg) to 5.0 × 10 −6 (mm / kg), The appropriate value is 0.5 mm or less, preferably 0.2 mm or less, more preferably 0.1 mm or less.
The data described above shows one specific example of each invention of the present application, and does not limit the technical scope regulated by each claim.
1.OHT用台車
5.タイミングベルト
5a。タイミングベルトの歯部
6.昇降機構
7.ハンド部
13.巻取ドラム
14.タイミングプーリ
14a.タイミングプーリの歯部
31,32.ピンチローラ
33,34.ガイドローラ
1. 4. Cart for OHT Timing belt 5a. 5. Timing belt teeth Elevating mechanism7.
Claims (6)
各タイミングベルト毎に、その歯部と噛合い、当該タイミングベルトによって懸吊される前記ハンド部を昇降制御するタイミングプーリと、
当該各タイミングプーリの駆動制御により、各対応する前記タイミングベルトを巻取り、又は繰り出しする巻取りドラムと、
を有する懸垂式昇降搬送装置用台車における被搬送物の昇降機構において、
前記タイミングベルト及び前記タイミングプーリの各歯部同士の噛合い状態が、被搬送物搭載の有無に対応した負荷荷重の有無により、前記タイミングベルトの弾性伸縮に起因して変動するタイミングベルトの歯ピッチと、弾性伸縮を生じない前記タイミングプーリの歯ピッチとにズレが生じても、前記タイミングベルトの歯幅寸法と前記タイミングプーリの歯幅寸法の最適化を図ることにより、噛合わせ不良を生じることなく、かつ、所定の噛合い強度を保つように構成したことを特徴とする懸垂式昇降搬送装置用台車における被搬送物の昇降機構。 A plurality of timing belts that form a belt shape, form a tooth portion along the longitudinal direction on one surface thereof, and support the transferred object gripping hand portion at the lower end portion;
For each timing belt, a timing pulley that meshes with the tooth portion and controls the lifting and lowering of the hand portion suspended by the timing belt;
Winding drums for winding or feeding out the corresponding timing belts by driving control of the timing pulleys;
In the lifting mechanism of the object to be transported in the carriage for the suspended lifting and lowering conveying device,
The tooth pitch of the timing belt in which the meshing state between the teeth of the timing belt and the timing pulley varies due to the elastic expansion and contraction of the timing belt depending on the presence or absence of a load corresponding to the presence or absence of the object to be conveyed. Even if there is a deviation in the tooth pitch of the timing pulley that does not cause elastic expansion and contraction, a meshing failure occurs by optimizing the tooth width dimension of the timing belt and the tooth width dimension of the timing pulley. And a mechanism for raising and lowering the object to be conveyed in the dolly type lifting and lowering conveyance device carriage, which is configured to maintain a predetermined mesh strength.
6. The suspension type lifting and lowering conveying cart as set forth in claim 1, wherein each timing belt is provided with electric power for power generation to the hand section or electric wires necessary for supplying control signals. Lifting mechanism for the object to be transported.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004301178A JP4803418B2 (en) | 2004-10-15 | 2004-10-15 | Lifting mechanism of the object to be transported in the cart for the suspension type lifting transport device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004301178A JP4803418B2 (en) | 2004-10-15 | 2004-10-15 | Lifting mechanism of the object to be transported in the cart for the suspension type lifting transport device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006111410A true JP2006111410A (en) | 2006-04-27 |
| JP4803418B2 JP4803418B2 (en) | 2011-10-26 |
Family
ID=36380247
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004301178A Expired - Fee Related JP4803418B2 (en) | 2004-10-15 | 2004-10-15 | Lifting mechanism of the object to be transported in the cart for the suspension type lifting transport device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4803418B2 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110203827A (en) * | 2019-07-04 | 2019-09-06 | 安徽国祯生态科技有限公司 | Power supply device for crane |
| WO2023209213A1 (en) * | 2022-04-29 | 2023-11-02 | Ocado Innovation Limited | Winch assembly of a load handling device |
| CN117585579A (en) * | 2024-01-19 | 2024-02-23 | 成都龙科重型机械制造有限公司 | New energy big battery pack installation equipment in final assembly workshop |
| CN118083766A (en) * | 2024-04-23 | 2024-05-28 | 福建佶龙机械科技股份有限公司 | Rotary screen printing machine thick liquid bucket conveying system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04354792A (en) * | 1991-05-31 | 1992-12-09 | Murata Mach Ltd | Overhead traveling vehicle |
| JPH05106696A (en) * | 1991-10-14 | 1993-04-27 | Bando Chem Ind Ltd | Toothed belt and toothed belt transmitting device using this belt |
| JPH094686A (en) * | 1995-06-16 | 1997-01-07 | Sony Corp | Timing belt mechanism and disc auto changer |
| JP2000109285A (en) * | 1998-09-30 | 2000-04-18 | Shinko Electric Co Ltd | Conveyor |
| JP2000281278A (en) * | 1999-03-29 | 2000-10-10 | Shinko Electric Co Ltd | Conveying device |
-
2004
- 2004-10-15 JP JP2004301178A patent/JP4803418B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04354792A (en) * | 1991-05-31 | 1992-12-09 | Murata Mach Ltd | Overhead traveling vehicle |
| JPH05106696A (en) * | 1991-10-14 | 1993-04-27 | Bando Chem Ind Ltd | Toothed belt and toothed belt transmitting device using this belt |
| JPH094686A (en) * | 1995-06-16 | 1997-01-07 | Sony Corp | Timing belt mechanism and disc auto changer |
| JP2000109285A (en) * | 1998-09-30 | 2000-04-18 | Shinko Electric Co Ltd | Conveyor |
| JP2000281278A (en) * | 1999-03-29 | 2000-10-10 | Shinko Electric Co Ltd | Conveying device |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110203827A (en) * | 2019-07-04 | 2019-09-06 | 安徽国祯生态科技有限公司 | Power supply device for crane |
| CN110203827B (en) * | 2019-07-04 | 2024-04-09 | 安徽国祯生态科技有限公司 | Power supply device of crane |
| WO2023209213A1 (en) * | 2022-04-29 | 2023-11-02 | Ocado Innovation Limited | Winch assembly of a load handling device |
| CN117585579A (en) * | 2024-01-19 | 2024-02-23 | 成都龙科重型机械制造有限公司 | New energy big battery pack installation equipment in final assembly workshop |
| CN117585579B (en) * | 2024-01-19 | 2024-04-05 | 成都龙科重型机械制造有限公司 | New energy big battery pack installation equipment in final assembly workshop |
| CN118083766A (en) * | 2024-04-23 | 2024-05-28 | 福建佶龙机械科技股份有限公司 | Rotary screen printing machine thick liquid bucket conveying system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4803418B2 (en) | 2011-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106927206B (en) | Article conveying apparatus | |
| JP4821389B2 (en) | Drive control device for stacker crane | |
| WO2020095571A1 (en) | Ceiling-hung shelf | |
| CN107015389B (en) | Flexible glass loading device | |
| US7464823B2 (en) | Overhead travelling carriage | |
| JP4803418B2 (en) | Lifting mechanism of the object to be transported in the cart for the suspension type lifting transport device | |
| JP2006219233A (en) | Carrying device | |
| JPH10194410A (en) | Lifting belt winding structure in transport carriage and transport carriage | |
| JP3832745B2 (en) | Overhead traveling vehicle system | |
| JP4239748B2 (en) | Transport device | |
| JP2009196742A (en) | Carrying device | |
| JP2009012916A (en) | Conveying system | |
| JP4298683B2 (en) | Transport device | |
| KR100946717B1 (en) | Conveyor belt | |
| JP2005022791A (en) | Suspending and carrying device | |
| JP7378895B2 (en) | Transport vehicle | |
| JP2020066511A (en) | Paper feeding device, image formation system and control method | |
| KR102407281B1 (en) | Clean stocker system | |
| JPH06156675A (en) | Conveyor mechanism | |
| JP7471743B2 (en) | Transport path | |
| JP7366499B2 (en) | Transport vehicle | |
| JP5628547B2 (en) | Product assembly equipment | |
| JP2004238088A (en) | Elevating and lowering platform | |
| JP7423142B2 (en) | Conveyance device | |
| KR101882507B1 (en) | Clean lifter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070406 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20091023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100129 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20100215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100830 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110105 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110404 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110610 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110624 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110714 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110727 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |