JP2005518550A - パターン認識システム - Google Patents
パターン認識システム Download PDFInfo
- Publication number
- JP2005518550A JP2005518550A JP2003571984A JP2003571984A JP2005518550A JP 2005518550 A JP2005518550 A JP 2005518550A JP 2003571984 A JP2003571984 A JP 2003571984A JP 2003571984 A JP2003571984 A JP 2003571984A JP 2005518550 A JP2005518550 A JP 2005518550A
- Authority
- JP
- Japan
- Prior art keywords
- star
- filter configuration
- detector
- optical
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64G—COSMONAUTICS; VEHICLES OR EQUIPMENT THEREFOR
- B64G1/00—Cosmonautic vehicles
- B64G1/22—Parts of, or equipment specially adapted for fitting in or to, cosmonautic vehicles
- B64G1/24—Guiding or controlling apparatus, e.g. for attitude control
- B64G1/36—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors
- B64G1/361—Guiding or controlling apparatus, e.g. for attitude control using sensors, e.g. sun-sensors, horizon sensors using star sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/781—Details
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/88—Image or video recognition using optical means, e.g. reference filters, holographic masks, frequency domain filters or spatial domain filters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/782—Systems for determining direction or deviation from predetermined direction
- G01S3/785—Systems for determining direction or deviation from predetermined direction using adjustment of orientation of directivity characteristics of a detector or detector system to give a desired condition of signal derived from that detector or detector system
- G01S3/786—Systems for determining direction or deviation from predetermined direction using adjustment of orientation of directivity characteristics of a detector or detector system to give a desired condition of signal derived from that detector or detector system the desired condition being maintained automatically
- G01S3/7867—Star trackers
Abstract
【課題】
【解決手段】 星パターン認識システム(1)は、独立して回転可能な鏡(M1)、(M2)のアレイ(12)の形態の光学フィルタ構成(10)を備える。遠方の星領域(2)からの光が、鏡アレイ(12)に入射する。各鏡(M1)、(M2)は、星領域の像をそれぞれ反射し、それらの像は、放物面鏡(14)によって検出器(18)における共通重複焦点に導かれる。鏡(M1)、(M2)は、認識すべき所与の星パターンが、フィルタの視界に存在する場合に、各鏡が、パターン内の異なる星の像を検出器(18)上の共通の点に反射することで、フィルタ構成の視野内に当該星パターンが存在することを示す検出可能な出力強度ピークを提供するように、互いに対して傾斜される。
【解決手段】 星パターン認識システム(1)は、独立して回転可能な鏡(M1)、(M2)のアレイ(12)の形態の光学フィルタ構成(10)を備える。遠方の星領域(2)からの光が、鏡アレイ(12)に入射する。各鏡(M1)、(M2)は、星領域の像をそれぞれ反射し、それらの像は、放物面鏡(14)によって検出器(18)における共通重複焦点に導かれる。鏡(M1)、(M2)は、認識すべき所与の星パターンが、フィルタの視界に存在する場合に、各鏡が、パターン内の異なる星の像を検出器(18)上の共通の点に反射することで、フィルタ構成の視野内に当該星パターンが存在することを示す検出可能な出力強度ピークを提供するように、互いに対して傾斜される。
Description
本発明は、パターン認識システムおよび方法に関し、特に、星パターンの認識に特に適した光学式パターン認識システムおよび方法に関する。
人工衛星や宇宙船は、一般に、位置決めや航行を補助するためのいわゆる「星追跡」システムを用いている。これらのシステムは、所定の参照すなわち案内星領域パターンを用いて、人工衛星や宇宙船が、その位置および方向を決定することを可能にする。かかるシステムでは、周囲の星領域の像が収集され、1以上の参照星パターンと比較されることで、人工衛星や宇宙船の位置および姿勢の決定が実現される。
かかる星パターン認識は、通例、コンピュータで電子的に実行される。結像された星領域は、反復パターン識別アルゴリズムによって、保存されている参照星パターンと比較される。しかしながら、このプロセスで反復が行われることから、これらの方法は、多大な計算を必要とし、比較的処理時間が長くなる。さらに、必要となる計算は、参照星パターン内の整合すべき星の数に伴って急激に増大する。そのため、用いるハードウェアおよびソフトウェアシステムにおいて、十分に高い処理能力と複雑な構成を準備すれば、高度な精度と解像度を実現できる。しかし、そのような高度な処理能力は、電力、空間、重量など、必然的に存在する制限により、宇宙船や人工衛星において利用できるとは限らないため、かかる電子的な星パターン認識システムにおいて実際的に実現可能な精度と処理速度は制限される。さらに、電子システムは、比較的壊れやすいため、電子処理に依存するパターン認識システムは、宇宙空間で遭遇する比較的厳しい条件においては、不具合を起こしやすくなる。
また、光学的にパターン認識を実行する方法も知られており、光学式パターン認識システムは、データの膨大な計算処理の必要性など、上述した電子式パターン認識システムの問題の一部を回避できる。
光学式パターン認識システムでは、処理すべき入力シーンは、結像された入力平面からフーリエ変換されて、いわゆる「整合」フィルタ構成上に送られる。そのフィルタ構成は、認識すべきパターンの共役フーリエスペクトルを記録する(そのため、認識すべきパターンを代表する)。フィルタ構成の出力は、次に、例えば、電荷結合素子(CCD)カメラを用いて光学的に検出される。フィルタ構成は、入力シーンの一部と、フィルタが認識するよう設定されたシーンとが整合した場合に、検出器において明点(光強度のピーク)を結像できるよう構成される。明点の存否によって、入力シーンと、フィルタが認識するよう設定された像との相関(整合)が示される。
実際には、光学式パターン認識システムでは、いわゆる4−fコヒーレント相関器が用いられる。かかる構成では、分析すべき入力シーンからのインコヒーレント照明が、空間光変調器(SLM)などの装置に結像され、元の入力シーンの像を一時的に記録する形で、分析すべき元のシーンの中間像を形成する。この中間像は、次に、コヒーレントな光源(レーザなど)からの照明によって照らされる。入力シーンの中間像(すなわちSLM)は、それを照らしているコヒーレントな波面に対して、対応する変調を引き起こす。
コヒーレント光の波面(入力シーンで変調されている)は、次に、結像された入力シーンを空間周波数に変換して光学フィルタ構成上に送るフーリエ変換要素(レンズ)を通過する。フィルタ構成の光出力は、第2のフーリエ変換要素(レンズ)によって検出器上に集束される。上述のように、相関(光強度)のピークは、入力シーンの像(の一部)が、フィルタの認識しようとする所定の像と「整合」する場合に検出される。
実際には、かかるシステムにおいて、フィルタ構成は、認識対象の像が入力像の一部である場合に、フィルタ構成のインパルス応答と、受信する入力信号の成分とが整合するよう設定される。フィルタ構成に入射するフィールド分布は、入力信号のフーリエ変換であり、フィルタによって変換されたフィールド分布は、整合が存在する場合にフーリエ変換要素によって明焦点になりうる平面波を含む。
かかるコヒーレント相関器構成の欠点は、相関器がコヒーレントな入力照明を必要とすることである。入力シーンは、通常、インコヒーレントに照明されるため、相関器に対して、そのシーンからコヒーレントな入力照明を何らかの方法で提供する必要がある。上述のように、これは、一般的に、元の入力シーンの中間像(一般的には、(更新可能な)記録)を形成することにより実現される。そして、これは、レーザなどのコヒーレントな光源を用いて照明されることにより、必要とされるコヒーレントな入力照明を相関器に提供できる。レーザによる照明のための中間像は、例えば、写真用フィルムに元の入力シーンを記録する方法や、液晶ライトバルブ(LCLV)などの空間光変調器(SLM)を用いて再生成する方法によって形成される。
また、インコヒーレントな元の入力像が、コヒーレントな像に変換されることなしに相関器に直接送られるインコヒーレント光学相関を実行する方法も知られている。しかしながら、インコヒーレント相関器は、コヒーレント相関器よりもシグナル/ノイズ比が悪いため、コヒーレント相関器よりも、感度が低く、背景と対象物との区別において信頼性が低い。
本発明の第1の態様では、星のパターンを認識する方法であって、
星領域からの光を光学フィルタ構成に入力する工程であって、前記フィルタ構成は、認識すべき所定の星パターンからの光を含む入力に応じて、識別可能な光出力を提供するよう構成されている、入力工程と、
前記フィルタ構成の前記出力を検出する工程と、
を備える方法が提供されている。
星領域からの光を光学フィルタ構成に入力する工程であって、前記フィルタ構成は、認識すべき所定の星パターンからの光を含む入力に応じて、識別可能な光出力を提供するよう構成されている、入力工程と、
前記フィルタ構成の前記出力を検出する工程と、
を備える方法が提供されている。
本発明の第2の態様では、星のパターンを認識するためのシステムであって、
認識対象の所定の星パターンからの入力光に応じて、識別可能な光出力を提供するよう構成された光学フィルタ構成と、
前記フィルタ構成の前記出力を検出するための検出器と、
を備え、
前記システムは、星領域からの光を前記フィルタ構成に入力できるよう調整可能である、システムが提供されている。
認識対象の所定の星パターンからの入力光に応じて、識別可能な光出力を提供するよう構成された光学フィルタ構成と、
前記フィルタ構成の前記出力を検出するための検出器と、
を備え、
前記システムは、星領域からの光を前記フィルタ構成に入力できるよう調整可能である、システムが提供されている。
本発明の星パターン認識システムは、光学フィルタ構成を用いて、遠方の星領域の特定の星パターンを認識する。したがって、星パターンの認識が光学的に実行されるので、本発明によると、例えば、パターン認識のためにデータに対して膨大なコンピュータ処理を行う必要がない。
しかしながら、本発明では、従来の光学相関システムと違って、遠方の星領域から放射された光を、光学フィルタ構成への入力として用いる。換言すれば、システムは、利用可能な元の星の光を直接用いて、所定の星パターンが星領域に存在するか否かを決定する(すなわち、フィルタ構成に入射する光は、星自体を源とする)。したがって、本発明は、レーザによって照明されることでコヒーレントな照明源をパターン認識フィルタ構成に提供する遠方の星領域の中間像を(例えば、SLMにおいて)形成する必要がない。したがって、本発明によれば、(例えば、SLMにおいて)遠方の星領域のいくつかの形態の中間像を生成する必要も、かかる中間像の照明のためにレーザを準備する必要もない。
出願人は、実際に、遠方の星領域内の星が、暗い背景に対して1組の孤立した点光源を効果的に含むことと、そのことから、星領域からの利用可能な光を直接用いて、十分に高い精度で星領域内の星パターンを光学的に識別できることを確認した。出願人は、フィルタ構成に直接入射する星の光を用いても、所定の星パターンからの照明に応じて、十分に区別可能な出力を取得して、星パターンを認識できることを発見した。
よって、本発明は、星パターン認識を光学的に実行する方法およびシステムを提供するが、それらによると、システムが利用可能な入力を準備するためにコヒーレントな光源で照明されなければならない星領域の中間像を形成する必要がない。したがって、本発明は、既存の星追跡システム(電子式システム、光学式システムの両方)と比べて、高速、高精度、頑丈、軽量、小型であって、比較的低い電力消費で動作可能な星パターン認識システムを提供する。
特定の星パターンを認識するために用いられる光学フィルタ構成は、遠方の星領域と、フィルタの認識対象である所定の星パターンとが整合するか否かを示すことができる任意の適切な構成であってよい。特に、光学フィルタ構成は、フィルタの認識対象である所定のパターンに整合する遠方の星領域からの照明が、適切にフィルタ構成に入射する場合に、検出器によって検出できる識別可能な出力を与えることが好ましい。
フィルタ構成の出力は、検出器に対して適切に集束された場合に、既存の光学相関配列と同様に、星パターンの整合が存在した場合に検出器において光強度のピークが形成されるよう構成可能であり、それが好ましい。したがって、光強度ピークの存在は、適切なパターン整合(すなわち、パターン認識)を示すことになる。整合が存在しない、すなわち、光の出力がない場合には、より低い光強度ピークが出力されてよい。
一般的には、フィルタ構成は、任意の適切な構成であってよい。フィルタ構成は、遠方の星パターンの周波数平面内に効果的に存在し、周波数平面における位相変調器として効果的に機能することが好ましい(すなわち、個々の周波数項の位相がフィルタによって扱われるように、入力光に関して位相変調された出力を提供することが好ましい)。したがって、例えば、ホログラフィック素子など、既存の光学相関器での利用が知られている適切な位相フィルタリング用光学フィルタを、フィルタ構成に用いることができる。
上述のように、星領域の各星は、点光源として扱われてよく、さらに、出願人は、比較的遠距離の場合には、星から発する光は、フィルタ構成の視野を横切る平面波に近づくことを認識した。出願人は、さらに、これらの平面波を適切に方向転換することにより、共通の焦点に導かれうる星領域の複数の互いにずれて重複する像を提供することができることを認識し、それによると、例えば、的確な星領域がフィルタ構成に入射した場合に、形成された星領域の複数の像の各々における異なる星が、検出器の同一の点で重複する(一致する)ように、重複する像を配置することにより、整合が存在する場合に、検出器によって光強度ピークが検出される。(複数の像は、共通の焦点に導かれうるため、像の異なる部分が重複するように、共通の焦点の平面内で互いに移動されてよいことがわかる)。
したがって、特に好ましい実施形態では、フィルタ構成は、視野内に存在する星領域に関して、検出器において共通の焦点に導かれうる複数の像を形成するよう構成される。この構成において、さらに、各像の様々な部分が、検出器における共通の焦点で重複する(一致する)ように配置されうることが好ましい。
この構成において、フィルタ構成によって形成された星領域の異なる像は、入力星領域内のパターンが、フィルタ構成によって認識すべき所定のパターンに整合する場合に、認識すべき星パターン内の異なる星の像に対応する星領域の像の各々の部分が、検出器上の共通の点において重複して(一致して)、より高い強度の出力ピーク(検出されて、パターン整合を示唆しうるもの)を提供するよう構成されることが好ましい。
一方、フィルタの認識対象であるパターンに整合するパターンが、入力された遠方の星領域内に存在しない場合には、フィルタ構成によって形成された星領域の各像は、入力星領域の構成星の像に対して正確に配列されて、検出器上の共通の点において厳密に重複することはない。この場合、検出器には、光強度ピークは存在しない(もしくは、比較的低いピークとなる)。
この構成では、フィルタ構成によって形成された星領域の各像を効果的に用いると、認識すべき星パターン内の特定の星の像を検出器に向かって適切に方向転換することができる。したがって、フィルタ構成は、認識すべきパターン内の星の数と少なくとも同じ数だけ、異なる方向の(星パターン)像を生成することが好ましい。この点において、フィルタ構成自体は、認識すべきパターン内の星の数が増えるほど複雑になってよいが、使用に当たって、認識プロセスは、認識すべきパターン内の星の数から効果的に独立している。したがって、本実施形態は、多くの星を含むパターンを認識するために用いることが可能であり(例えば、100以下の星を含むパターンの認識に利用可能であるが、16が適切な数であるとわかっている)、したがって、例えば、電子式パターン認識システムに比べて、性能の低下や処理時間の増大なしに、より高い精度を実現できる。
この構成でパターンが認識される場合に、取得される出力ピークの強度は、検出器上の共通の点において像が結合される星の数によって決まることがわかる。検出器で取得された出力ピークの強度測定値は、星パターンが正確に「整合」されたか否かを評価するために用いられてもよい。最も単純な例では、検出器は、単に、所与の閾値より高いピークが取得されたか否かを評価する。より高度な構成では、検出された出力ピークをピーク強度期待値(例えば、パターンが整合された場合に像が重複しあう星に関する既知の強度に基づく期待値)と比較して、整合が得られたか否かを調べてもよい。これにより、システムを大幅に複雑化することなく、パターン識別の成功の可能性を高めることができる。
上述の光学式パターン認識構成は、それ自体利点を有する物であり、星パターン認識の分野だけの利点にとどまらないものである。したがって、本発明の第3の態様によると、光学式パターン認識システムであって、光学フィルタ構成であって、前記フィルタ構成の認識対象である所定のパターンを含む入力シーンが、前記フィルタ構成に適切に入力された場合に、識別可能な光出力を提供すると共に、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成できるよう構成された光学フィルタ構成と、前記フィルタ構成の出力を検出するための検出器と、を備える、システムが提供される。
本発明の第4の態様によると、光学式パターン認識方法であって、
分析すべきシーンを光学フィルタ構成に入力する工程であって、前記フィルタ構成は、前記フィルタ構成の認識対象である所定のパターンを含む入力シーンが、前記フィルタ構成に適切に入力された場合に、識別可能な光出力を提供すると共に、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成できるよう構成されている、入力工程と、
前記フィルタ構成によって生成された前記複数の像を検出器上に集束させる工程と、
前記フィルタ構成の出力を前記検出器によって検出する工程と、を備える、方法が提供される。
分析すべきシーンを光学フィルタ構成に入力する工程であって、前記フィルタ構成は、前記フィルタ構成の認識対象である所定のパターンを含む入力シーンが、前記フィルタ構成に適切に入力された場合に、識別可能な光出力を提供すると共に、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成できるよう構成されている、入力工程と、
前記フィルタ構成によって生成された前記複数の像を検出器上に集束させる工程と、
前記フィルタ構成の出力を前記検出器によって検出する工程と、を備える、方法が提供される。
本発明のこれらの態様では、フィルタ構成は、上述のように、像平面ではなく周波数平面内に存在するため、分析すべきシーンからの照明の性質に応じて、分析すべきシーンを像平面に(例えば、レンズを用いて入力アパーチャに)結像し、次いで、光分布をフィルタ構成上に光学的にフーリエ変換して(色収差がないことが好ましい)、フィルタ構成に適切な入力照明を提供する必要があってもよい。これは、例えば、結像レンズを用いて、分析すべきシーンの平面に(例えば、入力アパーチャに)像を形成し、その像をフィルタ平面にフーリエ変換することにより実現できる。かかる分析すべきシーンの結像は、特に、例えば、分析すべき入力シーンが、(遠視野に存在する遠方の星領域と違って)遠視野に存在しない場合に必要であってよい。
上述のように、本発明のこれらの態様および実施形態では、フィルタ構成によって形成された複数の像は、通常、各像の異なる部分が、検出器における共通の焦点で重複する(一致する)ように配置される、または、配置されうるよう、互いにずらされる。したがって、フィルタ構成は、入力シーンに関する複数の互いにずれた像を生成することが好ましい。
フィルタ構成は、透過や反射によって複数の像を生成できる。特に好ましい実施形態では、複数の像は、入力シーンを適切に反射することにより生成される。したがって、フィルタ構成は、星領域の1つの適切な像を提供するようにそれぞれ構成された複数の反射面を備えることが好ましい。反射面は、互いに適切に配置および傾斜されることが好ましい。それら反射面は、光を反射するよう構成された鏡素子やホログラフィック素子によって提供することができる。特に、鏡を備える場合には、反射面は、並べて配置されることが好ましく、互いに傾斜可能であることが好ましい。かかる構成では、各反射面は、互いに独立して2つの回転軸に関して傾斜できることが好ましい。
かかる構成では、各反射面(例えば、鏡)は、入力された星領域の像を反射する。互いに反射面を傾斜させることにより、反射像が検出器において結合される際に重複するように、各反射像の異なる部分を配置することができる。したがって、各反射面は、的確な入力星領域がシステムの視野内に存在する場合に、認識すべき星パターンからの特定の星を検出器上の共通の点に反射するよう配置可能である。換言すると、各反射面は、システムの視野内の星パターン全体を反射するが、個々の反射面に対して異なる位置調整を行うことにより、的確な入力星領域がシステムの視野内に存在する場合には、そのパターンからの異なる個々の星が、各反射面によって検出器上の共通の点に結像される。
上述のように、反射面の数は、整合すべきパターン内の星の数以上であることが好ましい。したがって、例えば、100までの反射面を備えてもよいが、16が適切な数であることがわかっている。
複数の(重複する)像を提供するための透過フィルタ構成は、同様に動作し、例えば、フィルタ構成のための透過体積位相型ホログラムに用いることができる。
光学フィルタ構成は、回転不変であるよう構成されてよい。すなわち、かかる光学フィルタ構成は、判定されている遠方の星領域に対してフィルタ構成が平面内で(すなわち、フィルタ構成の光軸を中心に)回転しても、認識すべき所定の星パターンからの光入力に応じて、識別可能な出力(例えば、光強度ピーク)を提供する。これは、例えば、ホログラフィックフィルタ素子を用いて、適切なパターンの複数の同心円でその素子を記録することにより実現できる。なお、各同心円は、それら同心円の共通の中心からの距離が、認識すべき星パターンの中心点からの当該星の距離に対応するよう配置される。共通の中心からの円の間隔が、所与の中心点からの星群の間隔と整合する場合に、出力ピークが得られる。
しかしながら、特に好ましい実施形態では、フィルタ構成は、星領域がフィルタ構成の光軸を中心にフィルタに関して的確に回転して位置合わせされた場合に、入力された遠方の星領域内の星パターンを「認識する」識別可能な出力を与えるだけである。人工衛星や宇宙船にとっては、自身の回転方向を知ることが重要であるため、回転に対して敏感なフィルタ構成を備えることにより、これを決定することが可能になる。
回転に敏感なフィルタ構成は、例えば、相対的に傾斜した鏡、または上述のタイプの他の反射面のアレイを備えてよい。かかる構成では、遠方の星領域に対するフィルタ構成の回転は、フィルタによって反射された星領域像において、対応する回転を生じさせる。したがって、検出器において重複する反射像の部分は、遠方の星領域に対するフィルタの回転方向によって異なるため、的確な回転方向が実現された場合にのみ、星領域内の適切な複数の星の像が、検出器において重複する。
フィルタ構成が回転に敏感である場合には、様々な回転方向で星領域を検査できるよう、遠方の星領域に対して回転可能に構成されることが好ましい。このように、フィルタは、識別可能な出力が得られるまで回転されてよく、それにより、入力された星領域内の所定の星パターンに対する的確な回転方向が示される。特に好ましい構成では、光学フィルタ構成の光軸は、それを組み込んだ宇宙船や人工衛星の回転軸と一致するよう構成されており、それを組み込んだ宇宙船や人工衛星の主回転軸と一致することが好ましい。このように、フィルタは、電力供給の必要なく、例えば、人工衛星が、その主軸を中心に回転するのに合わせて回転するように固定されてよい。
フィルタ構成の出力は、単に、パターン認識システムの視野内に、認識すべき星パターンが存在するか否かを示唆するものとして用いることができる。しかしながら、特に好ましい実施形態では、その出力を、フィルタ構成の光軸が指示する角度を示すために用いることができるように構成される。宇宙船や人工衛星の指向角度を知ることは、しばしば所望されるため、人工衛星や宇宙船の分野では、特に重要である。
光軸が、認識すべき星パターンを真っ直ぐ指した場合に、フィルタ出力ピークは、検出器上の或る位置(例えば、中心)に存在するが、光軸が、その星パターンから外れた(ただし、星パターンは、システムの視野内に存在する)場合には、その「軸上の」位置に対して移動されることが好ましい。このように、検出器での出力「認識」ピークの位置は、認識している星パターンの位置に対するパターン認識システムの光軸の指示方向を示しうる。
上述の反射面アレイフィルタ構成は、このように動作できる。何故なら、入力された星領域に対してフィルタ構成を傾斜させることにより、形成された各像の位置を一様に平行移動し、その結果、以前に重複していた像の部分はすべて、依然として重複しつつ、検出器上の他の共通点に存在することになるからである。共通の重複点に対応する出力ピークの位置は、単に、検出器における出力焦点面を横切って平行移動される。この出力ピークの移動量は、システムが組み込まれた宇宙船や人工衛星の指向角度を決定するために用いられてよい。
この実施形態の特に好ましい構成では、フィルタ構成は、その光軸が人工衛星または宇宙船の主回転軸と平行になるように配置されると共に、宇宙船または人工衛星の主軸を中心に自由に回転するよう構成されており、それにより、フィルタ構成は、宇宙船または人工衛星の回転に対して、同じ速さで反対方向に回転する。これにより、電力供給の必要なく、宇宙船または人工衛星の指示角を連続的に観察することができる。
特に好ましい実施形態では、光学フィルタ構成は、複数の異なる所定の星パターンを認識するために用いることができる。すなわち、複数の所定の星パターンからの入力光に応じて、識別可能な出力を提供するよう構成されてよい。
かかる構成の一例においては、1つのフィルタ構成が、複数の異なる星パターンを認識するよう設定されてよい。例えば、そのフィルタは、入力光が入射するフィルタまたはフィルタの一部へ入射する入力光の角度に基づいて、異なる星パターンを認識するよう構成されてよい。かかる構成では、入力光は、どの星パターンを認識対象とするかによって、フィルタ上の異なる部分に入射するよう、および/または、異なる角度でフィルタに入射するよう方向付けられる。このタイプの構成は、ホログラフィックフィルタ素子が用いられている場合に、特に適している。何故なら、認識すべき複数の異なる星パターンを、ホログラムの容積内で、例えば、異なる角度または空間の位置に記録できるからである。
さらに、また、あるいは、フィルタ構成は、任意の時点に1つの星パターンしか認識できなくてもよく、その場合に、異なる星パターンの認識に用いるよう使用中に調整可能であってもよい。例えば、フィルタ構成が、反射(鏡)面のアレイを備える場合には、それらの面は、そのアレイが、異なる星パターンを認識するよう変更可能となるように、使用時に互いに移動可能であってよい。フィルタ構成は、異なる星パターンを検出するよう、使用時にプログラム可能であることが好ましい。かかる構成では、認識すべき各星パターンに対応する各反射面の複数組の相対位置を記憶しておき、必要に応じて用いることができる。したがって、フィルタ構成が、鏡アレイを備える場合には、そのアレイは、個々の鏡が、使用中に異なる相対位置をとるように調整可能であるよう、プログラム可能であることが好ましい。プログラム可能なフィルタ構成を用いると、1つのシステムで多数の星パターンを認識することが可能となり、完全に4πステラジアンを網羅することも可能になるため、より自律的な動作が実現される。
フィルタ構成からの光出力は、適切に検出器に供給されることが好ましい。例えば、フーリエ変換素子(フィルタの出力を周波数平面分布から像平面分布に変換するための素子)によって、検出のための検出器上に集束される。これは、例えば、レンズまたは鏡など、別個の集束(およびフーリエ変換)素子をフィルタの後に備えることにより実現できる。しかしながら、特に好ましい実施形態では、フィルタ構成自体が、その出力を検出器上に集束するなどの動作を行うことにより、システムの構成要素の数が少なくなる。例えば、フィルタが、ホログラフィック素子である場合には、その素子は、フィルタが出力光を集束させるよう動作するように、集束する参照波で記録されてよい。フィルタが、複数の反射(例えば、鏡)面を備える場合には、放物面または球面の集束させる形状を反射面に用いることにより、同じ効果を実現してもよい。
光学システムは、色収差のないことが好ましく、そうすれば、マルチスペクトルの星の光における多くの(好ましくはすべての)周波数を、検出器における共通焦点に導くことができる。これは、検出器でパターン認識に利用可能な星の光を最大限に利用する助けとなる。したがって、フィルタ構成は、用いられる任意のレンズなどがそうであるように、色収差のないことが好ましい。フィルタ構成に関して、鏡アレイ構成は、その性質上、色収差がない。ホログラフィックフィルタ素子の場合には、ホログラフィック素子は、例えば、その深さにわたる(反射または透過)ブラッグ面の空間的周期(間隔)の勾配によって記録(すなわち、チャーピング)されることで、複数の波長を反射(または透過)することが可能になる。
さらに、必要に応じて、システムは、システム内で生じうる任意の分散(例えば、色分散)を補償するよう適合されることが好ましい。かかる補償は、当該分野で周知の任意の適切な方法で実行可能である。
以上の説明から、例えば、鏡には色収差がないことや、鏡アレイはプログラム可能なフィルタ構成として容易に利用できることから、パターン認識システムにおいて鏡アレイを光学フィルタ構成として用いると、大きな利点があることがわかる。したがって、本発明の第5の態様によると、光学式パターン認識システムであって、
複数の鏡を備える光学フィルタ構成であって、前記複数の鏡は、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成するために、互いに対して異なる方向を有する、または、有するように配置可能である、フィルタ構成と、
前記フィルタ構成の出力を検出するための検出器と、
を備える、システムが提供される。
複数の鏡を備える光学フィルタ構成であって、前記複数の鏡は、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成するために、互いに対して異なる方向を有する、または、有するように配置可能である、フィルタ構成と、
前記フィルタ構成の出力を検出するための検出器と、
を備える、システムが提供される。
本発明の第6の態様によると、光学式パターン認識方法であって、分析すべきシーンを、互いに異なる向きを有する複数の鏡を備えた光学フィルタ構成に入力する工程と、前記複数の鏡によって生成された複数の像を検出器上に集束させる工程と、を備える、方法が提供される。
また、「チャーピングされた」ホログラフィックフィルタ素子は、それ自体、新規なものであり、利点を有する(例えば、より色収差がないため)。したがって、本発明の第7の態様によると、光学式パターン認識システムであって、ホログラフィック素子を備えた光学フィルタ構成であって、前記ホログラフィック素子は、深さ方向にわたって同様の向きで配された複数のブラッグ面を有し、前記複数のブラッグ面は、さらに、前記ホログラフィック素子の前記深さ方向にわたって相対間隔について勾配を有する、フィルタ構成と、
前記フィルタ構成の出力を検出するための検出器と、
を備える、システムが提供される。
前記フィルタ構成の出力を検出するための検出器と、
を備える、システムが提供される。
本発明の第8の態様によると、光学式パターン認識方法であって、
分析すべきシーンを、ホログラフィック素子を備えた光学フィルタ構成に入力する工程であって、前記ホログラフィック素子は、深さ方向にわたって同一の向きで配された複数のブラッグ面を有し、前記複数のブラッグ面は、さらに、前記ホログラフィック素子の前記深さ方向にわたって相対間隔について勾配を有する、入力工程と、
前記ホログラフィック素子によって生成された像を検出器上に集束させる工程と、
を備える、方法が提供される。
分析すべきシーンを、ホログラフィック素子を備えた光学フィルタ構成に入力する工程であって、前記ホログラフィック素子は、深さ方向にわたって同一の向きで配された複数のブラッグ面を有し、前記複数のブラッグ面は、さらに、前記ホログラフィック素子の前記深さ方向にわたって相対間隔について勾配を有する、入力工程と、
前記ホログラフィック素子によって生成された像を検出器上に集束させる工程と、
を備える、方法が提供される。
本発明のこれらの態様では、ホログラフィック素子は、一連の同様の向きに配されたブラッグ面を複数組備えることが好ましく、各組のブラッグ面は、上述のように、検出器における共通の焦点に導かれうる入力シーンの複数の像を生成するために、他の組のブラッグ面と異なる方向を有する、もしくは、有するように配置可能である。
上述したように、本発明の第5ないし第8の態様でも、例えば、分析すべきシーンが遠視野に存在しない場合、分析すべきシーンを適切に結像およびフーリエ変換して、(周波数平面)フィルタ構成に適切な入力を提供する必要があってよい。
本発明のこれらの態様および実施形態では、フィルタ構成によって形成された複数の像は、通常、各像の異なる部分が、検出器において重複する(一致する)ように配置される、または、配置されうるよう、互いにずらされることがわかる。したがって、フィルタ構成によって生成された像は、互いにずらされることが好ましい。
本発明の任意の態様および実施形態で用いられる検出器は、識別すべき応答の性質に従って適切に選択されてよい。例えば、検出器は、カメラすなわち電荷結合素子(CCD)であってよい。検出器は、可視光のみ、または、電磁スペクトルの可視部分に存在しない放射線のみを検出してもよいし、可視光と他の電磁放射線の両方を検出してもよい。本発明は、パターン認識のために検出された星の光が、可視でない場合や、可視でない可能性がある場合にも適用されることに、特に注意されたい。可視光からマイクロ波放射までの周波数の範囲が、本発明に特に適していることがわかっている。
上述のように、検出器は、検出されたすべての光強度ピークの強度を評価できることが好ましい。検出器は、ピークが、特定の好ましい所定の閾値よりも大きいか否かを判別できることが、より好ましい。そうすれば、例えば、より確実に真の相関ピークを識別することができる。また、ピークが、所与の強度値に関する特定の好ましい所定のマージン内に存在するか否かを判別できることが好ましい。
必要に応じて、フィルタ構成の出力を検出するための検出器を、2つ以上備えてもよい。例えば、フィルタ構成からの出力は、より正確な星パターンの識別を段階的に提供するなど、様々な目的のために設けられた複数の検出器に供給されてよい。かかる構成では、2つの検出器を用いることが好ましい。例えば、比較的広い視野を有する第1の検出器を用いて、人工衛星の指示角を比較的大まかに評価して、次に、より狭い視野を有する第2の検出器を用いて、より精密に決定してもよい。
また、必要に応じて、2つ(または、それ以上)のフィルタ構成(そして、それに対応する検出器)を用いてもよい。例えば、回転不変なフィルタを大まかな識別に用いて、次に、回転に敏感なフィルタを、回転方向を決定するために用いてもよい。
検出器に入射する光における望ましくないノイズおよび/または迷光の干渉を低減するための対策を講じてもよい。例えば、検出器の前にアパーチャが配置されてもよい。
さらに、検出された応答の電子処理を行って、例えば、背景ノイズを低減したり、得られた相関ピークを強化したりしてもよい。
本発明のシステムは、さらに、光学フィルタ構成の前に配置されたアパーチャを備え、システムの視野を制限することが好ましい。これは、例えば、フィルタにおける迷光の干渉を低減するのに役立つ。また、フィルタに入射する光が、平面波の形状であることを保証するのに役立つ(アパーチャを狭くすることにより、少なくともアパーチャの領域においては、波面が平面となることが保証されるため)。適切なアパーチャのサイズは、直径が約10cmであることがわかっている。システムの適切な視野は、5°ないし6°までであることがわかっている。(通常、1°の視野しか有することのできない従来のシステムに比べて好ましい)。
必要に応じて、光学フィルタ構成の前に、光学フィルタ構成に星の光を集束させるためのレンズなど、他の光学構成要素を配置してもよい。しかしながら、従来の光学相関器と違って、本発明のシステムにおいては、フィルタ構成に入力すべき光を変換するためのフ―リエ変換素子(例えば、レンズ)などの構成要素を設ける必要はない。これは、星の光がパターン認識システムに到達するまでに天文学的な距離を進むことから、光照射野の自由空間伝搬によって、入力された星の光が、すでに、色収差なくフーリエ変換されている(すなわち、空間周波数成分に変換されている)からである。したがって、フィルタ構成は、遠方の星領域の周波数平面内に効果的に存在する。
星パターン認識システムを特に参照して本発明を説明したが、当業者にとって明らかなように、本発明は、特に、認識すべきパターンが、比較的乱れのない一様な背景における比較的孤立した点状の光源からなる場合(すなわち、星パターンと同様のパターンである場合)など、他の分野のパターン認識にも適用可能である。
例えば、本発明は、星パターンと同じように、惑星の配置を識別するために用いることもできる。この場合、惑星は、恒星の点光源よりも広がっていることがあるが、その結果として、単に、相関ピークが比較的不正確になり、誤った像の重複により二次的なピークが生じやすくなるだけである。これにより、システムの精度は低くなるが、機能を妨げるものではない。また、必要に応じて、取得される相関ピークが比較的広い場合に、サブピクセル補間技術などの演算を実行して、精度を高めることも可能である。この問題は、認識すべき個々の像の源が大きくなるほど深刻になる。
本発明は、例えば、宇宙船のドッキングに用いることも可能であり、その場合、一様な背景に対して数多くの点光源が存在する形態の対象を、ドッキング対象物上に配置して、本発明のパターン認識システムを用いて追跡することができる。この場合、2つの船が近づくと、対象パターンへの距離が短くなるため、システムの焦点を数回合わせ直して、対象がシステムの視野に入っているときに、対象の適切な像(すなわち、フィルタの出力)が確実に検出器アレイに供給されるようにする必要があってもよい。ピンぼけの量は、距離の決定に用いることもでき、ピンぼけの速度は、接近速度の決定に用いることができる。対象のサイズも船が近づくにつれて変化するため、スケールに影響されないシステム、すなわち、何らかのスケール補償または調整が必要になる場合もある。
したがって、本発明の第9の態様によると、光学式パターン認識方法であって、
分析すべきシーンからの光を光学フィルタ構成に入力する工程であって、前記フィルタ構成は、認識すべき所定のパターンからの光を含む入力に応じて、識別可能な光出力を提供するよう構成されている、入力工程と、
前記フィルタ構成の前記出力を検出する工程と、
を備える、方法が提供される。
分析すべきシーンからの光を光学フィルタ構成に入力する工程であって、前記フィルタ構成は、認識すべき所定のパターンからの光を含む入力に応じて、識別可能な光出力を提供するよう構成されている、入力工程と、
前記フィルタ構成の前記出力を検出する工程と、
を備える、方法が提供される。
本発明の第10の態様では、光学式パターン認識システムであって、
認識対象の所定のパターンからの入力光に応じて、識別可能な光出力を提供するよう構成された光学フィルタ構成と、
前記フィルタ構成の前記出力を検出するための検出器と、
を備え、
前記システムは、分析すべきシーンからの光を前記フィルタ構成に入力できるよう配置される、システムが提供されている。
認識対象の所定のパターンからの入力光に応じて、識別可能な光出力を提供するよう構成された光学フィルタ構成と、
前記フィルタ構成の前記出力を検出するための検出器と、
を備え、
前記システムは、分析すべきシーンからの光を前記フィルタ構成に入力できるよう配置される、システムが提供されている。
本発明のこれらの態様は、本発明に関する上述の好ましい特徴のいずれか、またはすべてを備えうる。
図1は、本発明に従った星追跡のための星パターン認識システムの第1の実施形態を示す。
システム1は、光軸4を有する光学フィルタ構成10を備えており、光軸4は、パターン認識システムが組み込まれた人工衛星の主回転軸と一致するように配置されている。フィルタ構成10は、2つの鏡M1およびM2のアレイ12からなり、各鏡は、2つの回転軸を中心に独立して傾斜可能になっている。
そのシステムは、さらに、フィルタ構成10の前に配置されたアパーチャ6を備え、フィルタ構成の視野8を制限する。フィルタ構成10の後には、放物面鏡14(鏡アレイによって反射された光線が共通の焦点に到達することを可能にするための色収差のないフーリエ変換素子として機能する)が、その焦点距離と等しい距離に配置されている。鏡14は、フィルタ構成10からの光出力を、CCDカメラの形態の検出器18が位置する共通焦点7に集束させる。検出器18の前には、検出器18に入射する光の照射野を制限するためのアパーチャ16が配置されている。検出器18は、フィルタ構成10からの出力(相関)信号を検出する。
この星パターン認識システムを用いる際には、遠方の星領域2からの光3が、アパーチャ6を通ってシステム1に入り、フィルタ構成10の鏡アレイ12に入射する。フィルタ構成10から出力された光5は、次に、光の向きを変えて検出器18に集束させるよう機能する放物面鏡14に入射する。
鏡アレイ12の各鏡M1、M2は、遠方の星領域の像を反射し、それらの像は、放物面鏡14によって検出器18における共通の重複焦点に導かれる。鏡M1、M2は、それらの生成する像が、検出器18において互いにずれるように(すなわち、それらの像が厳密に重複せずに、2つの像における異なる部分が検出器18上で重複して一致するように)、互いに対して傾斜される。この特徴は、上述のように、所与の星パターンを認識するために用いられる。これは、的確なパターンがフィルタ構成の視野に存在する場合に、鏡M1、M2が、認識すべき星パターン内の異なる星を、検出器18上の同一点に反射することで、パターンが認識される際に検出器18において強度ピークを提供するように、鏡M1、M2を配置することにより実現される。
ここで、図1の星パターン認識システムが、2つの星S1およびS2からなる入力星領域2における所定のパターンを認識するよう構成された場合を、例として考える。鏡アレイ12の鏡M1およびM2は、それぞれ、フィルタ構成10の視野8の範囲に存在する星領域2全体の像を反射する。
鏡M1は、反射する星領域のフーリエ面全体が、検出器18の方向に向けられるように配置され、さらに、的確に方向付けられた星パターンがシステムの視野内に存在する場合に、星S1を含む像の一部が検出器18上の所与の点に位置するように配置される。これに対して、鏡M2は、的確に方向付けられた星パターンが視野内に存在する場合に、星S2を含む星領域全体の反射像の一部を、検出器18の同一点上に反射するように調整される。したがって、鏡M1およびM2によって生成され、星S1およびS2を含む星領域全体の反射像の2つの部分は、的確な星パターンがシステムの視野内に存在する場合に、検出器上の共通の点で一致して重複し、検出器18において検出可能な出力強度ピークを生じさせる。これは、検出器における像の一例を示す図6に図示されており、図中には、パターン認識を示す出力ピークが中心に見られる。
図1の星パターン認識システムは、フィルタ構成と遠方の星領域との間の面内回転(すなわち、フィルタ構成の光軸4に垂直な平面内での相対回転)に敏感である。これは、フィルタ構成10が、星領域2に対して回転されると、アレイ12の鏡M1およびM2によって反射される星領域パターンの遠視野分布において、対応する回転が生じるためである。しかしながら、像が回転されると、検出器18において重複する各像の部分は、星S1およびS2の部分に必ずしも対応するとは限らず、高い強度の出力ピークが、検出器18で検出されなくなる。
このような星領域に対する面内回転の影響は、図6および7に示されている。図6は、面内回転がない場合の検出像を示しており(θ=0°面内フィールド回転、ここで、θは、フィルタと、認識対象の星パターンとの間の相対面内角度であり、+180°から−180°の間の値をとりうる)、図7は、いくらかの相対面内回転がある場合の検出像を示す(θ=4.5°面内フィールド回転)。図からわかるように、パターン認識を示す図6の明るい検出点は、鏡M1、M2によって生成された異なる像内の当該の星が重複しないために、図7には存在しない。
回転に敏感であることを考慮して、星パターン認識システム1は、使用の際に回転可能であり、それによって、その面内回転を変更することができる。これは、例えば、適切に駆動されるステージやプラットホームにシステム1を取り付けることにより実現される。好ましい一実施形態では、システム1は、その光軸4が、システム1の組み込まれた人工衛星の主回転軸と一致するように配置される。次いで、システム1は、人工衛星が回転した際に、フィルタ構成10も光軸4を中心に回転するように固定される。次に、フィルタ10の鏡アレイ12が、的確な面内角度で星領域2の方を向くと、検出器18によって相関ピークが検出される。この構成により、パターン認識システムは、回転のためにさらなる電力を用いることなく、使用中に回転することができる。また、人工衛星の主軸を中心としてシステムが回転することにより、人工衛星の回転速度、歳差角度、および歳差速度に関する情報を取得することが可能になる。
回転に敏感であるだけでなく、図1の構成では、(例えば、人工衛星の指示方向が変化したために)フィルタ構成の光軸4の指示方向が変化すると、検出されるフィルタ出力も変化する。これは、光軸4が傾くと、鏡アレイ12が傾くからである。これにより、フィルタ構成10から放物面鏡14に至る光出力5、ひいては、検出器18の出力面に至る反射像の各々において平行移動が生じる。しかしながら、それでも、反射像の同じ部分が重複している。そのため、一旦、相関ピークが得られると、フィルタ構成(人工衛星)の指示方向が変化しても、単に、光強度ピークが、検出器18の面を横切って平行移動するだけである。ピークの平行移動の量を測定して、人工衛星の指示角の変化を決定するために用いてもよい。
指示方向の変化の結果として起きる相関ピークの平行移動は、図6および8によって示されている。図6は、星パターンが、フィルタ構成10の視界の中心に存在する場合(すなわち、光軸4が、認識されている星パターンを真っ直ぐ指している場合)を示しており、図8は、星パターンが、「中心を外れた」場合(すなわち、光軸が星パターンから(ある角度だけ)外れた方向を指している場合)を示している。(いずれの場合も、相対回転の方向は適切である(すなわち、相対面内回転θ=0°)。図8によると、パターン認識を示唆する光強度ピークが、指示方向の角度変位によって生じた方位角および高度の変化によって、図6の中心の位置から平行移動されていることがわかる。
この特徴を用いると、光軸4と人工衛星の主回転軸とをそろえて、人工衛星と共に回転するように固定させるのではなく、(例えば、適切に取り付けられたプラットホームにフィルタ構成を配置することによって)、フィルタ構成が、その軸を中心に自由に回転することを可能にすることで、最小限の電力消費で人工衛星の指示方向を連続的に観察できる。角運動量保存によると、フィルタ構成は、人工衛星と反対方向に同一の角周波数で回転する。
上述の星パターン認識システムの動作は、以下のように考えることができる。フィルタ構成10に到達する星領域からの光は、星領域とフィルタ構成とを隔てる天文学的な距離のために色収差なくフーリエ変換されているから、各星は、フィルタ構成の固定位置から見た場合に、(平面波面に垂直な)固有の方向単位ベクトルで特徴付けられる平面波面を、フィルタのアパーチャを通して効果的に提供する。次に、フィルタ構成の鏡アレイは、これらの単位ベクトルを効果的に平行移動および方向転換する多重化装置として働く。
例えば、3つの鏡M1、M2、M3を備える鏡アレイに入射し、単位ベクトルK1、K2、K3を有する3つの星S1、S2、S3の星領域を考えると、鏡の作用の結果として得られるベクトルは、K1n、K2j、K3mとなる。ただし、n、j、mは、1から3の間の任意の値をとりうる。一組の(n、j、m)は、3つの鏡のいずれかによる特定のベクトルの方向転換を示す(例えば、K12は、鏡M2の作用によるベクトルK1の方向転換を意味する)。各入射ベクトルが、異なる鏡によって同じように方向転換された場合(すなわち、以下の式が成り立つ場合)に、星パターンの整合(すなわち、検出器における相関ピーク)が起きる。
K1n=K2j=K3m、n≠j≠m (1)
この条件が満たされると、フィルタ構成の後に配置されたフーリエ変換素子によって明焦点に導かれうる平面波が得られる。
システムが星領域に対して回転すると、それに対応して、システムの入力アパーチャ(すなわち、鏡アレイの配置されている場所)において星パターンの遠視野が回転する。各星が受ける相対面内回転は、同じものであるが、鏡アレイに対する恒星領域の回転によって、方向単位ベクトルは非一様に方向転換し、上述の条件が満たされなくなる。そのとき、検出器における出力面は、適切な個々の(重複しない)星の像から成り立つ。
一方、指示方向の変化は、フーリエ変換素子の入力面における単純な平行移動と同等であり、これらの平行移動は、すべての星のベクトルに対して同じ値を有するため、結果としては、単に、検出器における相関ピークが平行移動するだけである(その平行移動が、指示方向を示す)。
したがって、システムは、効果的に鏡を用いて、検出器において星領域の複数の像内の異なる星を整列させる。システムが傾けられた場合、整列された星は、整列されたままであるが、それらの共通の位置が検出器上で移動する。システムが、その光軸を中心として回転されると、星の像は、整列しなくなる。
この構成によると、対象の星パターンは、光学システムの視野内に現れて、その面内方向がフィルタ構成の潜在的な方向と整合された場合に、上手く識別されることがわかる。星パターン認識システムの指示方向は、検出器の出力面における認識信号の横および縦方向の移動量によって決定できる。このシステムは、完全に光学式であるため、高速処理を提供すると共に、小型軽量化が可能である。
特に好ましい実施形態では、アレイ内の各鏡は、使用の際に独立して調整可能であり、それにより、様々なアレイの設定が可能になっている(すなわち、様々な星パターンを認識できる)。プログラム可能な鏡アレイを用いることが好ましく、アレイ12の各鏡は、認識すべき多くの異なる星パターン内の特定の星の適切な像を生成するのに必要な位置に対応する多くの位置に関して、事前にプログラムされることが好ましい。かかるプログラム可能なアレイを用いると、完全に4πステラジアンの範囲の天球を網羅できるように多くの星領域に対して星パターン認識を実現するよう、システムをプログラムできる。これにより、完全自律システムが可能となる。かかるシステムは、星追跡構成にとって非常に望ましいものである。
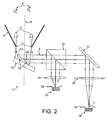
図2は、星パターン認識システムの変形例を示す。この構成では、フィルタ構成10から出力される光5の経路に、ビームスプリッタ20と鏡22が配置されており、放物面鏡14に代えて、2つのフーリエ変換レンズ24および26が配置されている。それぞれのレンズ24および26の焦点面には、入射アパーチャ28および32を備えた検出器30および34が配置されている。
本発明の本実施形態では、フィルタ構成10は、第1の実施形態と同じように機能するが、その出力は、ビームスプリッタ20および鏡22の構成によって、2つの検出器30および34に供給される。ビームスプリッタ20は、フィルタ構成10からの出力光5の一部をレンズ24に向かって方向付け、出力光の第2の部分は、ビームスプリッタ20を通過して、レンズ26への方向転換を行う鏡22に入射する。
検出器30は、検出器34よりも広い視野を有する。したがって、検出器30を用いて、例えば、人工衛星の全体的な指示方向などの大まかな評価を行ってもよい。その後、検出器34に提供された第2の比較的狭い視野を用いて、第1の検出器30によって評価された範囲内で、より正確に指示角の決定を行ってよい。この構成は、構造が比較的複雑であるが、使用の際の精度を損ねることなく、全体的な指示方向を、より早く走査して決定することができる。また、2つの検出器を用いることにより、例えば、検出器において個々のピクセルを輝かせるランダムな放射の影響によって生じる測定値の誤りを排除できる。各検出器は、他方の検出器が故障した場合の予備にもなる。
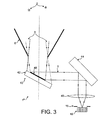
図3は、本発明の第3の実施形態を示しており、その実施形態は、フィルタ構成10が、鏡アレイの代わりに、基材42に支持された反射ホログラフィック光学素子40を備えることを除けば、図1に示した構成と同様のものである。放物面鏡14は、フィルタ構成10から出力された光5を検出器18の面における焦点に導くよう作用する鏡44およびフーリエ変換集束レンズ46に代えられている。
ホログラフィック素子40は、反射体積位相型ホログラフィック素子であり、(周知のホログラフィック技術を用いて)一連のブラッグ面で記録されることで、波長が格子の長さに整合する光に対して、反射鏡のような面として作用することが可能になる。一連のブラッグ面は、対象の星パターン内の各星に対して、適切な方向および形状で記録される。
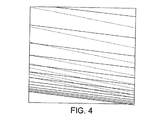
図4は、ホログラフィック素子40の断面図であり、ホログラフィックフィルムの深さ方向にわたって記録されたブラッグ面を示している。フィルタ40は、図4の実線と破線とでそれぞれ表されている2つの一連のブラッグ面で記録される。上述のように、これにより、フィルタは、認識すべきパターン内の2つの星に対する反射素子として機能することができる。素子の深さ方向に各々の一連のブラッグ面に対して間隔の勾配を設ける(すなわち、ホログラフィック素子40がチャーピングされる)ことにより、無色化が実現される。これによって、確実に、素子は、(単一の波長だけでなく)星の光の中に存在する複数の波長を反射して、共通の焦点に集束させることを可能にし、それにより、検出器では、より強く、かつ、より局所的な出力が提供される。
ホログラフィック素子40は、以下のブラッグ条件を満たす入射光を反射する。
2di(z).sinθi=λk
ここで、di(z)は、i番目の平面波格子(上述のように、認識すべきパターン内の各星に対して1つのかかる格子が存在する)の深さzにおける格子の空間的周期であり、θiは、ホログラムを照明するi番目の平面波(すなわち、特定の星の波面)の入射角であり、λkは、恒星を光源としフィルタに入射する複数の照射波長である。
この式からわかるように、空間的周期に勾配を設けることにより、ブラッグ条件は、複数の波長に対して満たされ、ホログラフィック素子40は、鏡のような素子として機能できるようになる。多くのこのような異なる方向のブラッグ面の勾配をホログラムに記録することで、認識すべきパターン内の各星に対して適切な「鏡」が生成される。
ブラッグ面の間隔の勾配は、例えば、ホログラフィックフィルムの適切な化学処理および温度管理(例えば、最終処理における脱水剤の温度管理)によって実現できる。
異なる星パターンにそれぞれ整合する複数組の一連のブラッグ面が、異なる空間または角度位置で同じホログラフィック素子40上に空間的または角度的に多重化されてよく、この場合、(例えば、入射光を、素子内の異なる部分に方向付ける、および/または、素子に向かって異なる角度で方向付けることにより)、同じ素子を、複数の異なる星パターンを識別するために用いることができる。
また、ホログラフィック素子40は、その出力を検出器18に集束させるよう構成されてよく、それにより、レンズ46(さらに、必要に応じて、鏡44)の必要がなくなり、1つの光学素子で、集束された出力信号を生成することができる。これは、平面ではなく、球面参照波、すなわち集束する参照波でホログラムを記録することにより実現できる。
上述のような参照星パターンの反射体積位相型ホログラムと同様に、検出器において複数の重複する像を同じように生成する透過体積位相型ホログラムを用いることもできる。かかる構成では、当該分野で周知のように、体積透過ホログラム内のブラッグ面は、ホログラムの面に対して傾いているため、入射光は、格子面に対して斜めに進入して回折され、ホログラム内を伝搬し、回折に関するブラッグの法則に支配された方向を向いてホログラムの他方の側に現れる。
ホログラフィック素子を整合フィルタとして用いると、フィルタ構成を大幅に小型軽量化できるという利点がある。
また、ホログラフィック光学素子をフィルタに用いる場合に、フィルタが、回転不変になるように、すなわち、素子が認識できる任意の所与の星パターンすなわち各々の星パターンについて、フィルタ構成の相対回転角に関係なく、対象の星パターンを認識できるように、素子を構成することもできる。この場合、図5に示すような、回転不変なマスクが、ホログラムの記録に用いられる。
図5のマスクにおいて、同心円52、54、56、および58は、円の共通の中心点Oを中心としたすべての可能な回転において認識される星パターンの各星S1、S2、S3、S4の位置を示す。共通の中心Oからの円52、54、56、58の間隔が、走査されている天球の範囲における所与の中心点からの星群のずれと整合する場合に、識別可能な出力が得られる。このように、ホログラフィックフィルタ素子は、回転不変である。
この構成では、共通の中心からの円の相対間隔と、分析されている星領域内における、(ホログラムを作成するために用いられるテンプレート内に定義された)選択された中心点からの星に関する対応するずれとを整合させることにより、認識が生じる。このタイプのフィルタ構成は、本質的に、移動に影響されない構成であるため、(例えば、回転不変なフィルタに整合する異なる星パターンの範囲が広いため)個々の星の位置と相対回転に基づくシステムよりも信頼性は低いものの、所与の星パターンの認識と、その位置の決定の両方が可能である。
しかしながら、回転不変なフィルタ構成によると、天球の広い範囲に対して高速な走査を実行し、フィルタ構成と星領域との相対面内回転に左右されずに、少なくとも候補天球領域を識別できる。回転不変なフィルタを用いて、候補天球領域が位置特定されると、次いで、図1ないし3を参照して上述したような回転感度のよいフィルタ構成を用いて、それらの領域をより確実に確認(または否認)し、相対面内回転などを決定することができる。このように、2つのフィルタ構成を組み合わせることで、天球の広い領域を高速に走査し、より精度のよいフィルタ構成によって次に行われる照合のために候補領域を識別することができる。
したがって、好ましい構成では、星パターンの位置を大まかに評価するために、このタイプの回転不変なホログラフィックフィルタが用いられ、次いで、より正確な決定を行うために、図1ないし3の実施形態を参照して説明したタイプの第2のフィルタが用いられる。
パターン認識システムの視野は、必要に応じて選択することができる。6°までの範囲の視野が最適であるとわかっている。例えば、サイズが512×512ピクセルのCCDを検出器として用いると共に、f値=2のレンズ(例えば、直径D=25mm、焦点距離F=50mm)を用いると、約6°×6°の視野を得ることができる。フィルタ構成の前のアパーチャの適切なサイズは、直径が約10cmである。
上述の実施形態のいずれにおいても、フィルタ構成の後ろに配置された集束および/または変換レンズは、フィルタと組み合わせて1つの光学素子として構成されてよいことを理解されたい。例えば、図1および2の実施形態では、鏡アレイ12は、入射する光を集束および方向転換させる放物面鏡または球面鏡を備えてよい。上述のように、ホログラフィックフィルタ構成が用いられる場合、その素子は、集束効果をさらに有する素子を形成するために、集束する参照波を用いて記録されてもよい。
本発明は、特に星追跡の用途を参照して説明されており、確かに、星追跡の用途に特に適しているが、本発明は、特に、認識すべきパターンが、星領域と同様のものである、すなわち、比較的乱れのない背景に対して比較的孤立した点光源を含む場合など、他の光学式パターン認識にも利用可能である。
したがって、例えば、このシステムは、星領域だけでなく、人工衛星や宇宙船が、近くに並んだ複数の惑星の方向に向いた場合に、それらを認識するために用いることもできる。かかる構成では、惑星は、完全な点光源ではなく、広がっていることがあるため、検出器において、広がった領域として結像される可能性がある。したがって、検出器における共通の点の重複は、星領域ほど正確ではなく、それに応じて、ピークの位置特定と、面内回転が整合された際の決定の両方における精度が損なわれるかもしれない。また、複数の重複が軸を外れる可能性も大きくなることがある。しかしながら、それでも、このシステムは、恐らく精度が低くなるものの、何らかのパターン認識を提供することができる。また、数値に関する後処理を必要とするため望ましくはないが、例えば、サブピクセル補間技術を用いて、精度を改善することもできる。
本発明を適用可能な他の用途としては、例えば、宇宙船のドッキングが挙げられる。かかるドッキングでは、通例、ドッキングする先の宇宙船の基準点を正確に追跡する必要がある。基準点は、例えば、複数のレーザもしくは発光ダイオード(LED)光源によって発せられる点光源のパターンという形で提供される。点光源のパターンは、ドッキングする側の宇宙船に取り付けられた本発明のパターン認識システムによって認識および位置特定できる。検出器における相関ピークの位置は、例えば、自動誘導システムへ方向指示の信号を提供しうる。あるいは、パターン認識システムは、ドッキングされる側の宇宙船(すなわち、ドッキング操作がなされている宇宙船)に取り付けられてもよく、この場合、パターン認識システムの出力に応じて、制御信号が生成され、ドッキングする側の宇宙船に送信されてよい。
このシステムにおける困難の1つとして、ドッキングする側の船が近づくと、追跡されているパターンのスケールが変わることが挙げられる。これは、スケール不変なフィルタを用いるか、もしくは、対象への距離が変わるにつれて、フィルタとして機能する複数鏡アレイの各鏡に対して、補償となるような複数の傾きを適用することによって補償できる。さらに、接近するにつれて、個々の点光源から発せられる光は、短い距離では平面波で適切に近似できなくなり(すなわち、点光源は、センサのアパーチャにおいて傾いた平面波を生じさせることがなくなり)、対象物の距離が無限大から外れると、像平面はレンズから外れるので、検出器における相関ピークのシャープネスを維持するために、ある程度、焦点の合わせ直しが必要になることがある。ピンぼけの量は、測定して、距離の決定に用いることが可能である、および/または、ピンぼけの速度は、接近速度の決定に用いることが可能である。
以上から、本発明、特に、本発明の好ましい実施形態は、既存の従来型のパターン認識システムに比べて、比較的小型軽量、色収差のない動作、宇宙環境下での信頼性と耐久性の強化、製造容易ひいては低コスト、高い汎用性と多機能性、および、高速の更新速度とコンピュータ処理の必要性の低減、を実現可能であることがわかる。
特に、本発明のパターン認識システムは、本質的に単純であるため、比較的小型軽量かつ低コストで設計できる。特に、プログラム可能な鏡アレイを用いると、コンピュータ処理を必要とすることなく、完全に4πステラジアンを網羅するよう構成することができるため、自律性を高めることができる。パターン整合を光学的に実行するため、高速な実行が可能であり、かつ、高価なデジタル電子計算能力や電子的な従部品を用いる必要がない(これは、全体の電力消費を減らし、複雑さを低減できることを意味する)。受動的な光学構成要素を用いることは、システムが、宇宙での利用の際に遭遇する厳しい放射線環境において、より高い耐性を有することを意味する。さらに、このパターン認識技術は、すぐに実現可能であり、フィルタ構成の構造に関する部分を除けば、識別のための数多くの案内星(これにより、精度を向上できる)を用いる際にも、使用に不利な条件はない。
1…システム
2…星領域
3…光
4…光軸
5…光
6…アパーチャ
7…共通焦点
8…視野
10…光学フィルタ構成
12…鏡アレイ
14…放物面鏡
16…アパーチャ
18…検出器
20…ビームスプリッタ
22…鏡
24…フーリエ変換レンズ
26…フーリエ変換レンズ
28…アパーチャ
30…検出器
32…アパーチャ
34…検出器
40…ホログラフィック素子
42…基材
44…鏡
46…フーリエ変換集束レンズ
52…同心円
54…同心円
56…同心円
58…同心円
M1…鏡
M2…鏡
S1…星
S2…星
2…星領域
3…光
4…光軸
5…光
6…アパーチャ
7…共通焦点
8…視野
10…光学フィルタ構成
12…鏡アレイ
14…放物面鏡
16…アパーチャ
18…検出器
20…ビームスプリッタ
22…鏡
24…フーリエ変換レンズ
26…フーリエ変換レンズ
28…アパーチャ
30…検出器
32…アパーチャ
34…検出器
40…ホログラフィック素子
42…基材
44…鏡
46…フーリエ変換集束レンズ
52…同心円
54…同心円
56…同心円
58…同心円
M1…鏡
M2…鏡
S1…星
S2…星
Claims (57)
- 星のパターンを認識する方法であって、
星領域からの光を光学フィルタ構成に入力する工程であって、前記フィルタ構成は、認識すべき所定の星パターンからの光を含む入力に応じて、識別可能な光出力を提供するよう構成されている、入力工程と、
前記フィルタ構成の前記出力を検出する工程と、
を備える、方法。 - 請求項1に記載の方法であって、前記識別可能な光出力は、光強度ピークを含む、方法。
- 請求項1または2に記載の方法であって、さらに、前記検出された出力の強度を評価して、前記所定の星パターンが前記星領域内に存在するか否かを判別する工程を備える、方法。
- 請求項1ないし3のいずれかに記載の方法であって、前記光学フィルタ構成は、前記星領域の周波数平面における位相変調器として機能するよう構成されている、方法。
- 請求項1ないし4のいずれかに記載の方法であって、さらに、前記光学フィルタ構成が、視野内に存在する前記星領域の複数の像であって、検出器における共通の焦点に導かれうる複数の像を形成するよう、前記フィルタ構成を構成する工程を備える、方法。
- 請求項5に記載の方法であって、前記光学フィルタ構成は、前記星領域の複数の互いにずれた像を生成し、それぞれの像の異なる部分が、前記検出器上の前記共通の焦点において重複する、方法。
- 請求項6に記載の方法であって、さらに、前記入力された星領域内のパターンが、前記フィルタ構成によって認識すべき前記所定のパターンに整合する場合に、認識すべき前記星パターン内の異なる星の像に対応する前記星領域の前記それぞれの像の部分が、前記検出器上の前記共通の焦点において重複するように、前記光学フィルタ構成を構成する工程を備える、方法。
- 光学式パターン認識方法であって、
分析すべきシーンを光学フィルタ構成に入力する工程であって、前記フィルタ構成は、前記フィルタ構成の認識対象である所定のパターンを含む入力シーンが、前記フィルタ構成に適切に入力された場合に、識別可能な光出力を提供すると共に、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成できるよう構成されている、入力工程と、
前記フィルタ構成によって生成された前記複数の像を検出器上に集束させる工程と、
前記フィルタ構成の前記出力を前記検出器によって検出する工程と、
を備える、方法。 - 請求項8に記載の方法であって、前記フィルタ構成が、前記入力シーンの複数の互いにずれた像を生成するように、前記フィルタ構成を構成する工程を備える、方法。
- 請求項1ないし9のいずれかに記載の方法であって、さらに、前記光学フィルタ構成を前記入力シーンに対して回転させる工程を備える、方法。
- 請求項1ないし10のいずれかに記載の方法であって、さらに、前記光学フィルタ構成の光軸が、宇宙船または人工衛星の主回転軸と一致するように、前記光学フィルタ構成を配置する工程を備える、方法。
- 請求項1ないし11のいずれかに記載の方法であって、さらに、前記フィルタ構成の前記出力を検出器において検出する工程と、前記検出器において検出された出力光強度ピークの位置を、前記検出器における参照位置に対して決定する工程を備える、方法。
- 請求項12に記載の方法であって、さらに、前記検出されたピークの前記位置を用いて、前記光学フィルタ構成の光軸の指示方向を、認識されている前記パターンに対して決定する工程を備える、方法。
- 請求項1ないし13のいずれかに記載の方法であって、さらに、前記光学フィルタ構成を用いて、複数の異なる所定のパターンを認識する工程を備える、方法。
- 請求項14に記載の方法であって、前記光学フィルタ構成は、複数の異なるパターンを認識できる単一のフィルタ構造を備える、方法。
- 請求項14または15に記載の方法であって、前記光学フィルタ構成は、任意の時点に1つのパターンのみを認識することができ、前記方法は、さらに、異なるパターンを認識するために、前記フィルタ構成を使用中に調整する工程を備える、方法。
- 光学式パターン認識方法であって、分析すべきシーンを、互いに異なる向きを有する複数の鏡を備えた光学フィルタ構成に入力する工程と、前記複数の鏡によって生成された複数の像を検出器上に集束させる工程と、を備える、方法。
- 光学式パターン認識方法であって、
分析すべきシーンを、ホログラフィック素子を備えた光学フィルタ構成に入力する工程であって、前記ホログラフィック素子は、深さ方向にわたって同様の向きで配された複数のブラッグ面を有し、前記複数のブラッグ面は、さらに、前記ホログラフィック素子の前記深さ方向にわたって相対間隔について勾配を有する、入力工程と、
前記ホログラフィック素子によって生成された像を検出器上に集束させる工程と、
を備える、方法。 - 請求項17または18に記載の方法であって、さらに、互いにずれた複数の像を生成するように、前記光学フィルタ構成を構成する工程を備える、方法。
- 請求項1ないし19に記載のいずれかに記載の方法であって、さらに、前記フィルタ構成によって利用可能な前記入力シーンの視野を制限するために、前記フィルタ構成の前にアパーチャを設ける工程を備える、方法。
- 光学式パターン認識方法であって、
分析すべきシーンからの光を光学フィルタ構成に入力する工程であって、前記フィルタ構成は、認識すべき所定のパターンからの光を含む入力に応じて、識別可能な光出力を提供するよう構成されている、入力工程と、
前記フィルタ構成の前記出力を検出する工程と、
を備える、方法。 - 星のパターンを認識するためのシステムであって、
認識対象の所定の星パターンからの入力光に応じて、識別可能な光出力を提供するよう構成された光学フィルタ構成と、
前記フィルタ構成の前記出力を検出するための検出器と、
を備え、
前記システムは、星領域からの光を前記フィルタ構成に入力できるよう調整可能である、システム。 - 請求項22に記載のシステムであって、前記フィルタ構成の前記識別可能な出力は、光強度ピークを含む、システム。
- 請求項22または23に記載のシステムであって、さらに、前記検出された出力ピークの強度を評価するための手段と、前記所定の星パターンが前記星領域内に存在するか否かを、前記評価された強度に基づいて判別するための手段を備える、システム。
- 請求項22ないし24のいずれかに記載のシステムであって、前記光学フィルタ構成は、前記星領域の周波数平面における位相変調器である、システム。
- 請求項22ないし25のいずれかに記載のシステムであって、前記光学フィルタ構成は、視野内に存在する星領域の複数の像であって、検出器において共通の焦点に導かれうる複数の像を形成するよう構成されている、システム。
- 請求項26に記載のシステムであって、前記光学フィルタ構成は、前記星領域の複数の互いにずれた像を生成するよう構成可能であり、それぞれの像の異なる部分が、前記検出器上の前記共通の焦点において重複するよう構成可能な、システム。
- 請求項27に記載のシステムであって、前記光学フィルタ構成は、前記入力された星領域内のパターンが、前記光学フィルタ構成によって認識すべき前記所定のパターンに整合する場合に、認識すべき前記星パターン内の異なる星の像に対応する前記星領域の前記それぞれの像の部分が、前記検出器上の前記共通の焦点において重複するように配置される、システム。
- 光学式パターン認識システムであって、
光学フィルタ構成であって、前記フィルタ構成の認識対象である所定のパターンを含む入力シーンが、前記フィルタ構成に適切に入力された場合に、識別可能な光出力を提供し、前記入力シーンの複数の像を生成できるよう構成されたフィルタ構成、
を備える、システム。 - 請求項29に記載のシステムであって、前記光学フィルタ構成は、前記星領域の複数の互いにずれた像を生成する、システム。
- 請求項26ないし30のいずれかに記載のシステムであって、前記フィルタ構成は、前記入力された像を反射することにより前記複数の像を生成する、システム。
- 請求項31に記載のシステムであって、前記光学フィルタ構成は、複数の反射面を備え、前記複数の反射面は、それぞれ、前記入力シーンの1つの像を提供するよう構成されている、システム。
- 請求項32に記載のシステムであって、前記複数の反射面は、並べて配置されている、システム。
- 請求項32または33に記載のシステムであって、前記複数の反射面は、互いに対して傾斜可能である、システム。
- 請求項34に記載のシステムであって、各反射面は、互いに独立して2つの回転軸に関して傾斜可能である、システム。
- 請求項32ないし35のいずれかに記載のシステムであって、前記複数の反射面は、鏡素子を備える、システム。
- 請求項22ないし36のいずれかに記載のシステムであって、前記フィルタ構成は、前記入力シーンに対する前記フィルタ構成の前記光軸を中心とした前記フィルタ構成の回転姿勢に関係なく、認識すべき前記所定のパターンが前記入力シーン内に存在することに応じて、前記識別可能な出力を提供する、システム。
- 請求項22ないし36のいずれかに記載のシステムであって、前記フィルタ構成は、前記入力シーンが、前記フィルタ構成の前記光軸を中心として前記光学フィルタ構成に関して特定の回転方位にある場合にのみ、認識すべき前記所定のパターンが前記入力シーン内に存在することに応じて、前記識別可能な出力を提供する、システム。
- 請求項38に記載のシステムであって、前記光学フィルタ構成は、光軸を中心として前記入力シーンに対して回転可能である、システム。
- 請求項39に記載のシステムであって、前記光学フィルタ構成は、前記フィルタ構成の前記光軸が、宇宙船または人工衛星の主回転軸と一致するように、前記宇宙船または前記人工衛星に取り付けられる、システム。
- 請求項22ないし40のいずれかに記載のシステムであって、さらに、検出された出力強度ピークの前記検出器上の参照位置に対する、前記検出器上の位置を測定するための手段を備える、システム。
- 請求項22ないし41のいずれかに記載のシステムであって、前記光学フィルタ構成は、複数の異なる所定のパターンを認識するよう構成されている、システム。
- 請求項42に記載のシステムであって、前記光学フィルタ構成は、複数の異なるパターンを認識できる単一のフィルタ構造を備える、システム。
- 請求項42または43に記載のシステムであって、さらに、前記フィルタ構成を調整して、異なるパターンの認識を可能にするための手段を備える、システム。
- 請求項22ないし43のいずれかに記載のシステムであって、前記光学フィルタ構成は、前記検出器上に出力を集束させるよう構成されている、システム。
- 請求項22ないし45のいずれかに記載のシステムであって、前記光学フィルタ構成は、色収差がない、システム。
- 光学式パターン認識システムであって、
複数の鏡を備える光学フィルタ構成であって、前記複数の鏡は、検出器において共通の焦点に導かれうる前記入力シーンの複数の像を生成するために、互いに対して異なる向きを有する、または、有するように配置可能である、フィルタ構成と、
前記フィルタ構成の出力を検出するための検出器と、
を備える、システム。 - 光学式パターン認識システムであって、
ホログラフィック素子を備えた光学フィルタ構成であって、前記ホログラフィック素子は、深さ方向にわたって同様の向きで配された複数のブラッグ面を有し、前記複数のブラッグ面は、さらに、前記ホログラフィック素子の前記深さ方向にわたって相対間隔について勾配を有する、フィルタ構成と、
前記フィルタ構成の出力を検出するための検出器と、
を備える、システム。 - 請求項48に記載のシステムであって、前記ホログラフィック素子は、一連の同様の向きに配されたブラッグ面を複数組備え、各組のブラッグ面は、検出器における共通の焦点に導かれうる前記入力シーンの複数の像を生成するために、他の組のブラッグ面と異なる向きを有する、または、有するように配置可能である、システム。
- 請求項47ないし49のいずれかに記載のシステムであって、前記フィルタ構成は、互いにずれた複数の像を生成する、システム。
- 請求項22ないし50のいずれかに記載のシステムであって、さらに、複数の検出器を備える、システム。
- 請求項51に記載のシステムであって、比較的広い視野を有する第1の検出器と、比較的狭い視野を有する第2の検出器とを備える、システム。
- 請求項22ないし52に記載のいずれかに記載のシステムであって、さらに、前記フィルタ構成の前記視野を制限するために前記フィルタ構成の前に設けられているアパーチャを備える、システム。
- 光学式パターン認識システムであって、
認識対象の所定のパターンからの入力光に応じて、識別可能な光出力を提供するよう構成された光学フィルタ構成と、
前記フィルタ構成の前記出力を検出するための検出器と、
を備え
前記システムは、分析すべきシーンからの光を前記フィルタ構成に入力できるよう構成されている、システム。 - データ処理手段にインストールされた場合に、請求項1ないし21のいずれかに記載の方法を実行するよう特に適合されたコンピュータソフトウェア。
- 本明細書に実質的に記載され、かつ、添付の図面のいずれかに関連するように、パターンを認識する方法。
- 本明細書に実質的に記載され、かつ、添付の図面のいずれかに関連する光学式パターン認識システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB0204603.5A GB0204603D0 (en) | 2002-02-27 | 2002-02-27 | Pattern recognition system |
| PCT/GB2003/000815 WO2003073366A1 (en) | 2002-02-27 | 2003-02-27 | Pattern recognition system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005518550A true JP2005518550A (ja) | 2005-06-23 |
| JP2005518550A5 JP2005518550A5 (ja) | 2005-12-22 |
Family
ID=9931898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003571984A Pending JP2005518550A (ja) | 2002-02-27 | 2003-02-27 | パターン認識システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7368745B2 (ja) |
| EP (1) | EP1479037A1 (ja) |
| JP (1) | JP2005518550A (ja) |
| AU (1) | AU2003212504A1 (ja) |
| GB (2) | GB0204603D0 (ja) |
| WO (1) | WO2003073366A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006267529A (ja) * | 2005-03-24 | 2006-10-05 | Hyogo Prefecture | 多重シーン撮像用光学素子および視線検出入力装置 |
| CN103148852A (zh) * | 2013-03-01 | 2013-06-12 | 国家测绘地理信息局卫星测绘应用中心 | 一种基于有向环的星图识别方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8169623B2 (en) * | 2009-09-01 | 2012-05-01 | Raytheon Company | Optical apparatus and method for measuring the attitude of an object in outer space |
| US8724848B1 (en) * | 2010-11-11 | 2014-05-13 | Google Inc. | Locating objects using indicia |
| ITTO20110323A1 (it) * | 2011-04-08 | 2012-10-09 | Thales Alenia Space Italia S P A C On Unico Socio | Sistema metrologico ottico proiettivo grossolano e di precisione |
| ITTO20110325A1 (it) * | 2011-04-08 | 2012-10-09 | Thales Alenia Space Italia S P A C On Unico Socio | Sistema metrologico ottico proiettivo per la determinazione di assetto e posizione |
| US8494221B2 (en) | 2011-04-28 | 2013-07-23 | Honeywell International Inc. | Inverse star tracker using psuedo-random overlapping circles |
| WO2015028993A1 (en) * | 2013-09-01 | 2015-03-05 | Varun Akur Venkatesan | Hand geometry reader |
| US10070080B2 (en) * | 2015-05-18 | 2018-09-04 | The Boeing Company | Multi-directional, multi-spectral star tracker with a common aperture and common camera |
| GB201614330D0 (en) | 2016-08-22 | 2016-10-05 | Univ Of Sussex The | Attitude determination system |
| US11851217B1 (en) | 2019-01-23 | 2023-12-26 | Ball Aerospace & Technologies Corp. | Star tracker using vector-based deep learning for enhanced performance |
| US11635326B2 (en) * | 2019-04-02 | 2023-04-25 | Waymo Llc | Stray-light testing station |
| US11828598B1 (en) * | 2019-08-28 | 2023-11-28 | Ball Aerospace & Technologies Corp. | Systems and methods for the efficient detection and tracking of objects from a moving platform |
| CN115995047B (zh) * | 2023-02-15 | 2023-08-15 | 自然资源部国土卫星遥感应用中心 | 一种基于星等模板的双视场星敏感器星图识别方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3263088A (en) * | 1963-08-27 | 1966-07-26 | Gen Precision Inc | Star field correlator |
| US3543237A (en) * | 1966-07-29 | 1970-11-24 | Bell Telephone Labor Inc | Pattern recognition apparatus and method |
| US4621329A (en) * | 1979-12-31 | 1986-11-04 | Itek Corporation | Star catalog navigation system |
| US5206499A (en) * | 1989-06-22 | 1993-04-27 | Northrop Corporation | Strapdown stellar sensor and holographic multiple field of view telescope therefor |
| US5012081A (en) * | 1989-06-22 | 1991-04-30 | Northrop Corporation | Strapdown stellar sensor and holographic lens therefor |
| US5528702A (en) * | 1991-05-31 | 1996-06-18 | Seiko Instruments Inc. | Optical pattern recognition apparatus with coordinate conversion function |
| JP2695600B2 (ja) * | 1993-10-01 | 1997-12-24 | 浜松ホトニクス株式会社 | 光学検査装置 |
| US5619596A (en) * | 1993-10-06 | 1997-04-08 | Seiko Instruments Inc. | Method and apparatus for optical pattern recognition |
| US5770850A (en) * | 1997-04-30 | 1998-06-23 | At&T Corp | Sensor array tracking and detection system having an alignment positioner |
| JP3879805B2 (ja) * | 1999-07-02 | 2007-02-14 | 富士ゼロックス株式会社 | 光学フィルタリング装置および方法 |
| EP1081459B1 (de) * | 1999-08-31 | 2002-06-19 | Leica Geosystems AG | Tachymeter-Fernrohr |
| US6464364B2 (en) * | 2000-01-27 | 2002-10-15 | Aoptix Technologies, Inc. | Deformable curvature mirror |
| US6956687B2 (en) * | 2001-04-03 | 2005-10-18 | Cidra Corporation | Optical blocking filter having an array of micro-mirrors |
-
2002
- 2002-02-27 GB GBGB0204603.5A patent/GB0204603D0/en not_active Ceased
-
2003
- 2003-02-27 GB GB0304525A patent/GB2389901B/en not_active Expired - Fee Related
- 2003-02-27 WO PCT/GB2003/000815 patent/WO2003073366A1/en active Application Filing
- 2003-02-27 JP JP2003571984A patent/JP2005518550A/ja active Pending
- 2003-02-27 AU AU2003212504A patent/AU2003212504A1/en not_active Abandoned
- 2003-02-27 EP EP03708323A patent/EP1479037A1/en not_active Withdrawn
- 2003-02-27 US US10/504,771 patent/US7368745B2/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006267529A (ja) * | 2005-03-24 | 2006-10-05 | Hyogo Prefecture | 多重シーン撮像用光学素子および視線検出入力装置 |
| JP4549213B2 (ja) * | 2005-03-24 | 2010-09-22 | 兵庫県 | 多重シーン撮像用光学素子および視線検出入力装置 |
| CN103148852A (zh) * | 2013-03-01 | 2013-06-12 | 国家测绘地理信息局卫星测绘应用中心 | 一种基于有向环的星图识别方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2003212504A1 (en) | 2003-09-09 |
| GB2389901B (en) | 2004-07-28 |
| GB0304525D0 (en) | 2003-04-02 |
| US7368745B2 (en) | 2008-05-06 |
| US20050213096A1 (en) | 2005-09-29 |
| GB2389901A (en) | 2003-12-24 |
| WO2003073366A1 (en) | 2003-09-04 |
| GB0204603D0 (en) | 2002-04-10 |
| EP1479037A1 (en) | 2004-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5227859A (en) | Passive coherent radiation detection system | |
| KR100796112B1 (ko) | 단일 피처들의 광학 계측법 | |
| US5777742A (en) | System and method for holographic imaging with discernible image of an object | |
| US5703692A (en) | Lens scatterometer system employing source light beam scanning means | |
| US7368745B2 (en) | Pattern recognition system | |
| US7067784B1 (en) | Programmable lens assemblies and optical systems incorporating them | |
| US8934097B2 (en) | Laser beam centering and pointing system | |
| US6118119A (en) | Spectral analyzer with wavelength and direction indicator | |
| US6603134B1 (en) | Optical detection system | |
| US5148496A (en) | Optical correlator with symmetric reflective optics | |
| EP2902796A2 (en) | Two axis interferometric tracking device and method | |
| JPH0670592B2 (ja) | コンパクト連続波波面センサー | |
| US7999922B1 (en) | Coherent imaging system and method for producing high resolution images | |
| JP2002521735A (ja) | 折返された光軸を有し、グレイスケール空間光変調器を使用する高出力反射型光学的相関器 | |
| US5600123A (en) | High-resolution extended field-of-view tracking apparatus and method | |
| US10070080B2 (en) | Multi-directional, multi-spectral star tracker with a common aperture and common camera | |
| US20220244519A1 (en) | Telescopes | |
| US5448355A (en) | System for measuring tilt of image plane of optical system using diffracted light | |
| WO2004083795A2 (en) | Optical system | |
| US20220011091A1 (en) | Computational shear by phase stepped speckle holography | |
| US6297497B1 (en) | Method and device for determining the direction in which an object is located | |
| US4705400A (en) | Shearing phase difference sensor | |
| RU2644994C1 (ru) | Датчик угла поворота | |
| US4834537A (en) | Position encoding holographic spectrometer | |
| Sloan et al. | An optical processor for object recognition and tracking |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080722 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090113 |