JP2005515513A - 概略図の生成 - Google Patents
概略図の生成 Download PDFInfo
- Publication number
- JP2005515513A JP2005515513A JP2003562571A JP2003562571A JP2005515513A JP 2005515513 A JP2005515513 A JP 2005515513A JP 2003562571 A JP2003562571 A JP 2003562571A JP 2003562571 A JP2003562571 A JP 2003562571A JP 2005515513 A JP2005515513 A JP 2005515513A
- Authority
- JP
- Japan
- Prior art keywords
- data
- interest
- intersection
- route
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3476—Special cost functions, i.e. other than distance or default speed limit of road segments using point of interest [POI] information, e.g. a route passing visible POIs
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/343—Calculating itineraries, i.e. routes leading from a starting point to a series of categorical destinations using a global route restraint, round trips, touristic trips
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3655—Timing of guidance instructions
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M3/00—Automatic or semi-automatic exchanges
- H04M3/42—Systems providing special services or facilities to subscribers
- H04M3/487—Arrangements for providing information services, e.g. recorded voice services or time announcements
- H04M3/4872—Non-interactive information services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2242/00—Special services or facilities
- H04M2242/14—Special services or facilities with services dependent on location
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2242/00—Special services or facilities
- H04M2242/30—Determination of the location of a subscriber
Abstract
【解決手段】 本発明は、道路網などの地理的交通網の表示データの生成方法を開示するもので、データベース2から(少なくとも1つのノードと1つのエッジから形成される)拡張交差地点に関連するデータを選択するステップから構成される。この方法により、既存の端末が有していた適切なデータの選択に関する問題が解決し、移動端末等の分野において特徴のあるアプリケーションが利用可能となる。地理的交通網の表示データの生成のための機器と、位置図形の画像を提供する方法もまた開示されている。
Description
本発明は、地理的交通網の表示データの生成方法及び装置に関するものであり、又、場所の概略図の画像を提供する方法に関するものである。本発明では特に、移動端末についての経路サービス分野におけるアプリケーションを利用するものである。
従来のインターネットに基づく経路・案内サービスは、コンピュータ端末といった大型画面に対応する情報を提供するものであった。しかし、一般に、携帯電話やPDAといった小型端末での利用には適していなかった。
移動端末は通常、小型の画面を有し、地図のような複雑な地理情報を表現するには、能力の限界があった。
本発明は従来システムに関するいくつかの問題点を解決しようとするものである。
従って、本発明の第1の実施の形態は、地理的交通網の表示データを生成する方法であって、地理的交通網の表現であるノードと前記ノードに接続されるエッジを含むデータベースを用い、(a)少なくとも1つの前記ノードと少なくとも1つの前記エッジを含む拡張交差地点に関連するデータベースからデータを抽出するステップと、
(b)前記抽出データを出力するステップとを備える。
(b)前記抽出データを出力するステップとを備える。
ここで使用される用語である”ノード”と”エッジ”とは、好ましくはトポロジカル(topological)な意味で用いられ、例えば、ノードは道路網内で地点として定義され、エッジは、2つの前記地点を相互に接続するものとして定義され得る。その様なエッジは直線で構成され、あるいは、より複雑な相互に接続する線として定義される。本明細書中の道路網では、”単純な”道路の交差地点(2つ以上の道路が出会う地点)を”ノード”とみなし、道路自体を”エッジ”とみなす。
ここで使用される用語”拡張交差地点”とは、好ましくはノードとエッジの組み合わせを意味し、その集りは、単一で”より上位のレベル”のノードと関連するエッジとで形成されるとみなされ得る。ここで、例えば、交差点、立体交差周辺の多くの路上交差地点は、そこに接続するエッジとして立体交差に流れこむ全ての道路を伴って、単一の拡張交差地点(ノード)を形成しているとみなされ得る。一方、”単純な交差地点”は、好ましくは、(例えば道路網におけるT字の交差点のような)交通網における単一の存在を意味している。
拡張交差地点を選択することによって、又、拡張交差地点に関連するデータを抽出及び出力することによって、地理的交通網の表示データを、より効果的に生成され得る。例えば、交差地点に関連する重要な情報はデータベース中の全てのデータを抽出及び出力する必要なく提供され得るからである。
データベースは好ましくは、地理的データのデータベースであり、例えば、道路網(あるいは、その代わりに鉄道網又は歩道網等)を決定する座標や接続情報を含んでいる。データベースは、例えばノードやエッジのデータを関連付けて保持するテーブルを含み、その両者の間の関係性を定義付けるテーブルを更に含んでも良い。
好ましくは、データを抽出するステップは、(i)拡張交差地点の一部を形成するノードをデータベースから抽出するステップと、(ii)拡張交差地点の一部を形成し、抽出されたノードに接続された少なくとも1つのエッジを規定の基準に基づきデータベースから抽出するステップとを備えても良い。
このことは、特定の表示を抽出するために必要なデータ量を更に減じることができる。
データを抽出するステップは、エッジの長さが規定の長さより短い場合、そのエッジを抽出するステップを備えても良い。その代わりに、あるいは、それに加えて、データベースにおいて関連するフラグに基づき、エッジを抽出するステップを備えても良い(例えば、エッジが重要か否かを示すフラグ)。
又、データを抽出するステップは、データベースから既に抽出された他のエッジに関連するデータに基づき、エッジを抽出するステップを備えても良い
データを抽出するステップは、エッジが立体交差、2車線道路及び中央分離帯のような道路人工物の要素である場合、そのエッジを抽出するステップも備えても良い。データを抽出するステップは、エッジが道路人工物かどうかを判定するため、エッジの周辺の道路網を分析するステップを更に備えても良い。
データを抽出するステップは、好ましくは、抽出したいくつかのエッジに接続された少なくとも1つのノードを抽出するステップを更に備える。このことは、更に抽出されたデータ(例えば、抽出されたいくつかのエッジに接続する上述のノード)が当初抽出されたノードとの関係を持つことを保証することで抽出の効果を再び高めることができる。
その代わりに、あるいは、それに加えて、データを抽出するステップは、拡張交差地点の一部を形成しなくても拡張交差点に接続された少なくとも1つのエッジを抽出するステップを更に備えても良い。このことによって、本発明では、抽出された全てのデータセットを要求するする必要とせずに拡張交差地点を生成することができる。
好ましくは、抽出データを出力するステップは、移動端末装置(例えば、携帯電話やPDA)のような顧客の端末装置に前記抽出データを送信するステップを更に備える。例えば、抽出したデータを端末装置に送信することで、顧客の端末装置自体でデータの抽出を行なうよりも、顧客の端末装置の要求の記憶容量や速度を小さくすることができる。
好ましくは、抽出データは携帯端末装置の画面に表示され、好ましくは、概略図の形式で表示されるステップを更に備える。従って、様々な画面サイズ(及びコスト)は、最小現に留める。一方、出力するために必要なデータ量を減らすことによる利益を見込んで、テキストを用いて、単純な概略図を提供するか、データの略式表示を提供する。1つ以上の端末装置の画面サイズ、画面の縦横比、解像度及びその他の端末装置の特性に基づいたデータから、写実的な概略図は生成される。データは、歩行者が使用するのに適した方式で抽出、及び/又は、表示されても良い。その代わりに、あるいは、それに加えて、データ、及び/又は、写実的な概略図は、ユーザの能力に基づき抽出、改修、あるいは、生成されても良い。これは、ユーザのカスタマイズにより経路指定情報を受け取ることに役立つ。
好ましくは、データベース内の他のノードを更に抽出することによって、更に拡張された交差地点に関連する他のデータを抽出するステップと、抽出ノードに接続される1つ以上の他のエッジを識別し、更に規定される基準を満たすステップと、更に拡張された交差地点に関連する前記他のデータを更に出力するステップとを更に備える。抽出された個々のノードに対して、より関連性の小さいデータを生成するといった無駄を省く一方、データの範囲を効果的に拡張することができる。
本発明の他の実施の形態は、地理的交通網の表示データを処理する方法であって、交通網は、エッジによって接続されたノードから形成され、前記エッジを抽出するステップと、エッジは人工物の要素であるかどうかを判定するために抽出エッジ付近の交通網の一部を分析するステップと、分析の結果に対応して抽出エッジを処理するステップとを備える地理的交通網の表示データを処理する地理的交通網の表示データを生成する方法を提供する。
ここで使用される”人工物”という用語は、好ましくは、少なくとも1つのノードと少なくとも1つのエッジと、人が偶然居る所にある全ての構造、及び/又は、交通網の目的、又は交通網に発生する問題とを含む交通網の構成要素を意味し、例えば、道路網の背景において、中央分離帯は”人工物”としてみなされる。そして、それは、その周辺に道路の交差地点(ノード)や接続する道路(エッジ)を付加的に作り出す。なぜならば、ある所在地から他の場所ヘ効果的な道案内をするために必要とされないからである。
従って、このような分析や交通網内の人口物を考慮して処理することによって、処理時間やデータサイズに優先順位をつけることができる。
分析するステップは、抽出エッジ付近の交通網の一部の配置が規定の基準を満たすかどうかを判定するステップを備え得る。例えば(他でも良い)、交通網は道路網であり、交通網を分析するステップは、中央分離帯の一部を形成する前記エッジかどうかを判定するステップを備え得る。
好ましくは、抽出したノードの組と、修正アルゴリズムに基づくエッジとを処理するステップを更に備え、その結果、個々のアプリケーションに対し、データは更に最適に利用
され得る。このような修正アルゴリズムは、(例えばPL/SQL、C++又はJavaのような)翻訳された又はコンパイルされた言語で作られる。この方法は、規定された修正アルゴリズムに基づくデータから生成される写実的な概略図を修正するステップを更に含む。
され得る。このような修正アルゴリズムは、(例えばPL/SQL、C++又はJavaのような)翻訳された又はコンパイルされた言語で作られる。この方法は、規定された修正アルゴリズムに基づくデータから生成される写実的な概略図を修正するステップを更に含む。
本発明に関して、地理的交通網の表示データを処理する方法であって、a)データベースから前記データを検索するステップと、b)修正アルゴリズムに基づきデータを処理するステップと、c)処理データを出力するステップとを備える。
好ましくは、修正アルゴリズムは、データを地形的に簡略化し、場合によってデータサイズを減少する。
データは複数のノードを含み、修正アルゴリズムは、ノードの相対位置を調節しても良い。データは、複数のエッジを含み、修正アルゴリズムは、少なくとも2つのエッジの間の相対角度を調節しても良い。修正アルゴリズムは、少なくとも2つのエッジの相対角度を、優先する角度の組の1つにしても良い(snaps)。修正アルゴリズムは、少なくとも2つのエッジの相対角度を並行又は逆行に調節しても良い。
更に、修正アルゴリズムは、異なる要素のデータ間で、a)望ましい配置関係を識別するステップと、b)識別された望ましい関係を最も満足する配置を提供するため、要素の相対位置を調節するステップとを備える。
データは、少なくとも1つのノードと、ノードに接続された少なくとも1つのエッジを含み、少なくとも1つの交差地点の出口は表示され、修正アルゴリズムは、少なくとも1つのエッジを、交差地点の出口として識別するステップと、識別された望ましい関係を最も満足する配置を提供するため、交差地点の出口の相対位置及び/又は角度を調節するステップを備える。
地理的交通網の表示データの処理方法は、規定された位置関係と要素の形状との類似点に対応した位置関係の強度を算出するステップを更に含み、その位置関係は、並行又は逆行である。
データは、少なくとも1つのノードと、ノードに接続された少なくとも1つのエッジを含み、修正アルゴリズムは、エッジ同士の並行関係に優先して、エッジ同士の逆行関係を維持し、又/あるいは、修正アルゴリズムは、1つ以上のエッジを、交差地点の出口として識別するステップと、交差地点の出口をグループ化し交差地点出口群とするステップとを含み、交差地点出口群は同じ点から発するように表示され得る。
又、修正アルゴリズムは、群の数を最小化するように試行しても良い。
更に、データは、少なくとも1つのノードと、前記ノードに接続された少なくとも1つのエッジを含み、修正アルゴリズムは、a)1以上のエッジを交差地点の出口として識別するステップと、b)前記交差地点出口のそれぞれの角度を決定するステップと、c)前記交差地点出口の角度に基づいて前記データを修正するステップとを備える。交差地点出口は異なる角度を持つ一連のポリライン線(polyline segment)によって定義され、交差点出口の角度は、表示する角度を決定するために前記ポリライン線を分析することで決定される。
好ましくは、抽出あるいは処理されたデータを出力するステップは、データを図形データとして出力し、好ましくは、概略図の形式の図形データとして、前記データを出力するステップを含む。
修正アルゴリズムは、好ましくは、選択された画面の形状に図形データを調節して配置する。
好ましくは、修正アルゴリズムは、ノードの対として経路を定義する経路データを受信するステップと、ノードの1つの重要度を算出するステップと、算出された重要度に基づき前記経路データを処理するステップとを更に備える。
この地物は、自動で提供され、そのため、本発明の他の実施の形態は、地理的交通網の表示データを処理する方法であって、ノードの対として経路を定義する経路データを受信するステップと、ノードの1つの重要度の算出を行なうステップと、算出された重要度に基づき経路データを処理するステップとを備える。
ノードを、重要か無意味かのどちらか1つとして分類するステップを含む。ノードの重要度を算出するステップは、ノードに接続された第1のエッジに対応する第1のパラメータと、ノードに接続された第2のエッジに対応する第2のパラメータを検索するステップと、第1と第2のパラメータを比較するステップとを備える。
第1のパラメータは、第1のエッジに対応する等級を含み、第2のパラメータは、第2のエッジに対応する等級を含む。第1のパラメータは、第1のエッジに対応する道路名を含み、第2のパラメータは、第2のエッジに対応する道路名を含む。
写実的な概略図の表示データを処理するステップは、前記算出された重要度に基づいて複数の経路区間(route segment)に分化するステップを更に備える。
データを処理する方法は、好ましくは、複数のノードのそれぞれの重要度を算出するステップと、算出された重要度に基づき、経路を複数の経路区間に分割するステップとを備える。
データを処理する方法は、好ましくは、経路を複数の経路区間に分割するステップを含み、経路を分割するステップは、2つの重要なノードによって分けられた複数の経路区間を生成するステップを備え、経路は、好ましくは、始点ノードと終点ノードを有し、経路を分割するステップは、2つの重要なノード、あるいは、1つの重要なノードと1つの始点ノードと1つの終点ノードとによって分けられた複数の経路区間を生成するステップとを備える。
データを処理する方法は、好ましくは、経路を複数の経路区間に分割するステップと、
区間が、予定の長さを超える場合、複数の経路区間の1つを更に分割するステップ、あるいは、区間が、規定した数以上の重要ではないノードを含む場合、複数の経路区間の1つを更に分割するステップとを更に備える。
区間が、予定の長さを超える場合、複数の経路区間の1つを更に分割するステップ、あるいは、区間が、規定した数以上の重要ではないノードを含む場合、複数の経路区間の1つを更に分割するステップとを更に備える。
本発明による他の実施の形態は、所在地の写実的な概略図を提供する方法であって、a)規定された抽出アルゴリズムに基づいてデータベースから1つ以上の関心地点を抽出するステップと、b)関心地点を含む写実的な概略図を生成するステップと、 c)生成された写実的な概略図を出力するステップとを備える方法を提供することである。
抽出アルゴリズムは、比較的整理された概略図を生成し、該当する関心地点(個々では、POIとして参照)を提供し、その他不必要な情報を削除することができる。
好ましくは、抽出アルゴリズムは、複数の関心地点のランク付けを行なうステップと、関心地点のランクに基づいて1つ以上の関心地点を抽出するステップとを備える。従って、例えば抽出アルゴリズムは、規定された数の関心地点だけ(一例として10個の高順位の関心地点)を選択する。
抽出アルゴリズムは、各々の関心地点に関連付けられて記録された1つ以上のパラメータを検索するステップと、各々の関心地点に関連付けられて記録されたパタメータに対応した1つ以上の関心地点を抽出するステップとを備える。従って、例えば、前記パラメータは関心地点の分類(category)を示す(例えば、関心地点は”映画館”や”家”として分類されても良い)。この場合、抽出アルゴリズムは特定の分類の関心地点だけを抽出ても、あるいは、分類内の優先的な関心地点を抽出しても良い。
好ましくは、抽出アルゴリズムは、位置を抽出するステップと、抽出した位置から規定半径内にある1つ以上の関心地点を抽出するステップとを備える。従って、抽出アルゴリズムは選択する範囲を制限することができる。
一例として、データベースは、複数のノードを含み、抽出アルゴリズムは、ノードを抽出するステップと、ノードの周辺の領域の範囲を決定するステップと、前記決定された領域内にある関心地点を抽出するステップとを備える。従って、ノードは地図上の交差点として表示される。
領域の範囲は、複雑な形であっても良く、又、ノードの周辺の領域の範囲を決定する方法は、例えば、ノードを中心とした円で領域を決定しても良い。
抽出アルゴリズムは、関心地点の視認性、又は、日時に基づきデータベースから1つ以上の関心地点を抽出する。
所在地の写実的な概略図を提供する方法は、特定のユーザに関連する、気に入った関心地点のリストを記録するステップとを更に含み、抽出アルゴリズムは、前記リストに記録された関心地点を優先的に抽出する。
抽出アルゴリズムはユーザの好みや広告の要求に基づいてデータベースから1つ以上の関心地点を抽出しても良い。このことによって、ユーザによる経路指定情報を、より自動化することができる。
所在地の写実的な概略図を提供する方法は、a)道順を計算するステップと、b)前記計算された道順の表示を示すデータを出力するステップとを更に備える。北を示す矢印が載っているような従来の”地図”とは違い、本発明は、例えば、希望した目的地までの道順を示す指標のような、様々な希望の方向を示すことにでカスタマイズされた写実的な概略図を出力できる。
この重要な地物は、独立して提供される。従って、本発明は、所在地の写実的な概略図を提供する方法において、a)道順を計算するステップと、b)前記計算された道順の表示を示す情報を含む写実的な概略図を生成するステップと、c)前記写実的な概略図を出力するステップとを備える。
情報は様々な方法で表現され、例えば、希望する目的地を赤で、その目的地から離れた所は青で、その間をグラデーションで色づけしても良い。好ましくは、その情報は矢印の形で提供される。
通常、写実的な概略図は、交差地点に入る進入道路区間と、交差地点から出る進出道路区間とを有する交差地点を含み、進入道路区間と進出道路区間との間の角度を決定するステップと、ステップb)において、角度に基づいた前記情報を抽出するステップとを備える。例えば、写実的な概略図内の矢印の数は、この角度に基づき変化する。
所在地の写実的な概略図を提供する方法において、月や太陽の現在位置を決定するステップと、月や太陽の前記現在位置を表示するデータを出力するステップとを更に備える。
これにより、ユーザは、月や太陽の現在位置によって、より簡単に自身の位置が分かり、相互に関連する概略図を受け取ることができる。
本発明による他の実施の形態は、所在地の写実的な概略図を提供する方法であって、a)月や太陽の現在位置を決定するステップと、b)決定した月や太陽の前記現在位置を示す情報を含む、前記場所の写実的な外略図を生成するステップと、c)前記概略図を出力するステップとを備える方法を提供する。
情報は様々な方法で提供されても良い。例えば、図形の太陽や月の方向にについては明るく色づけする。一方、情報は目印を含んでも良い。一例として、概略図内の目印の位置は、月や太陽の現在位置に対応する。もう1つの例としては、目印は、投影画像を含み、投影画像の配置は月や太陽の現在位置に対応する。
前記方法において、a)配置(configuration)データを受信するステップと、b)ステップa)において受信した前記配置データに基づいて写実的な概略図を生成するステップとを更に備える。このため、例えば、異なる端末装置の能力(例えば画面サイズや解像度)やユーザの好みといった要望形式で写実的な概略図を”カスタマイズ”することができる。
本発明による他の実施の形態は、写実的な概略図のデータを提供する方法であって、a)配置(configuration)データを受信するステップと、b)ステップa)において受信した前記配置データに基づいて写実的な概略図を生成するステップと、c)ステップb)において生成した写実的な概略図を出力するステップとを備える
その方法は、a)データベースから交通網要素を抽出するステップと、b)規定された抽出アルゴリズムに基づいて、データベースから関心地点を抽出するステップと、c)ステップa)において抽出された交通網要素と、ステップb)において抽出された関心地点との間の地理的関係を測定するステップと、d)ステップc)において測定された地理的関係に基づいて、関心地点の抽象的表示を生成するステップと、e)ステップa)において抽出された交通網要素のセットと、ステップd)において生成された関心地点の抽象的表示とを含む写実的な概略図を生成するステップと、f)写実的な概略図を出力するステップとを更に備える。
所在地の写実的な概略図を提供する方法であって、a)データベースから交通網要素を抽出するステップと、b)規定された抽出アルゴリズムに基づいて、データベースから関心地点を抽出するステップと、c)ステップa)において抽出された前記交通網要素と、ステップb)において抽出された前記関心地点との間の地理的関係を測定するステップと、d)ステップc)において測定された前記地理的関係に基づいて、前記関心地点の抽象的表示を生成するステップと、e)ステップa)において抽出された交通網要素のセットと、ステップd)において生成された前記関心地点の抽象的表示とを含む写実的な概略図を生成するステップと、f)前記写実的な概略図を出力するステップとを更に備える。
本実施の形態は、(例えばエッジやノードのような)交通網における関心地点の地理的関係に基づいて関心地点の表示を抽象化する。このため、道路網に関連する関心地点の表示はそのままで、交通網の要素を操作することができる(例えば、変形あるいは回転)。地理的関係とは通常、視覚的なサイズ、視認性、又は、近さのような相対関係である。
特に、地理的関係は、エッジから前記関心地点への視認性に対応し、又は、エッジから関心地点を見た時のサイズに対応し、又は、エッジから関心地点までの距離に対応する。関心地点の抽象的表示は、エッジに対する関心地点の正面の抽象的表現を含んでも良い。
本発明による他の実施の形態は、決められた地理的領域によって囲まれた所在地の写実的な概略図を提供する方法であって、a)データベースから前記決められた領域から外れている1つ以上の関心地点を抽出するステップと、b)前記決められた領域から外れている前記関心地点までの道順を示す表示を含む、決められた領域の写実的な概略図を生成するステップと、c)ステップb)において生成された前記写実的な概略図を出力するステップとを備える方法を提供する。
本発明の実施の形態では、例えば、決められた地理的領域が関心地点を含まない場合、あるいは、高くて見えやすい目印(例えばパリのエッフェル塔)のような関心地点が特に重要である場合、提供される情報は、実際は画面の外にあるとしても、表示することができる。
写実的な概略図は、第1の情報源からの第1のソースデータと第2の情報源からの第2のソースデータを含む。
本発明による他の実施の形態は、写実的な概略図を提供する方法であって、第1の情報源から第1のソースデータを取得するステップと、第2の情報源から第2のソースデータを取得するステップと、前記第1のソースデータと前記第2のソースデータを含む写実的な概略図を生成するステップと、生成された前記写実的な概略図を出力するステップとを備える方法を提供する。
好ましくは、写実的な概略図を提供する方法は、第1の情報源において第1の地物を識別するステップと、第2の情報源において第2の地物を識別するステップと、第2の地物が第1の地物と重なるかどうかを測定するステップと、第2の地物が第1の地物と重なる場合、第2の地物と第1の地物を関連付けるステップとを備える。従って、例えば、第1の地物はビルで、第2の地物がそのビルに基づく名前であっても良い。
一例として、その方法は、情報源から抽出されるノードによって第2の拡張交差地点の要素のセットと、抽出され、規定された基準を満たすノードに接続する1つ以上の内部エッジを識別するステップとを備え、出力される写実的な概略図は、第1の交差地点要素のセットを含む第1の交差地点と、第2の拡張交差地点要素のセットを含む。第1及び第2の拡張交差地点は、例えば連続した破線によって結合されても良い。
本発明による他の実施の形態は、地図データを処理する方法であって、エッジによって接続されたノードの交通網の一部を形成するエッジを抽出するステップと、エッジが人工物の要素であるかどうかを判定するために前記抽出エッジ付近の前記交通網の一部を分析するステップと、分析の結果に対応して前記抽出エッジを処理するステップと備える方法を提供する。
従って、この方法は、特定の形式の道路人工物(例えば、中央分離帯、立体交差又は中央分離帯のある幹線道路)を識別し、処理することができる。
好ましくは、ソースデータにおいて人工物にラベル付け(labelling)することだけで可能となる。
本発明による他の実施の形態は、所在地の写実的な概略図を提供する方法であって、a)データベースから地図データを抽出するステップと、b)規定された修正アルゴリズムに基づいて、修正された概略図を生成するステップと、c)ステップb)において生成された概略図を出力するステップとを備える方法を提供する。
この実施の形態によって、例えば、選択された画面形状に合わせて地図データを配置することで概略図をカスタマイズすることができる。又、例えば、線を直線化することで概略図を簡略化することができる。又、例えば、統計的な気候に基づいて陰影をつけ、概略図を”見る、感じる”といったことをカスタマイズしても良い。
前記修正アルゴリズムは、例えば、ノードの相対位置やエッジ間の相対角度を調節して地図データを簡略化する。
この実施の形態の利点は、共通のソースデータのセットから様々な異なる概略図を生成することができることである。又、概略図の形式及び/又は内容はユーザや出力装置の特性に応じカスタマイズされ得る。
通常、修正アルゴリズムは、少なくとも1つのエッジを、交差地点の出口として識別するステップと、交差地点の出口同士の配置関係を識別するステップと、識別された配置関係を最も満足する配置を提供するため、交差地点の出口の相対位置及び/又は角度を調節するステップを備える。従って、例えば、修正アルゴリズムは、並行又は逆行の関係のような特に強い関係を保持しても良い。
修正アルゴリズムは、1つ以上のエッジを交差地点の出口として識別するステップと、交差地点の出口をグループ化し交差地点出口群とするステップとを含み、交差地点出口群は同じ点から発するように表示され得る。群の数は、概略図を簡略化するため最小化され得る。
修正アルゴリズムは、選択された画面の形状に合わせて地図データを配置しても良い。
修正アルゴリズムは、データや概略図は、中央サーバ(central server)から生成され、処理され、そして/又は、出力され、顧客の移動端末装置において、前記データや概略図を受信し、表示するステップを備えても良い。
好ましくは、修正アルゴリズムを実行するためのシステムは、概略図を生成し、携帯端末装置に対し出力する中央サーバと、概略図を受信し、表示する顧客の移動端末装置とを具備する。
本発明による他の実施の形態は、好ましくは、上述の修正アルゴリズムによって、データや概略図を受信、あるいは、表示する顧客の移動端末装置を提供する。
本発明による他の実施の形態は、ノードとノードに接続されたエッジの表示データを含むデータベースを使用して、地理的交通網を表示するデータを生成する装置であって、ノードとエッジは地理的交通網を表現し、(a)少なくとも1つの前記ノードと少なくとも1つの前記エッジを含む拡張交差地点に関連するデータベースからデータを抽出する手段と、(b)前記抽出データを出力する手段とを備える装置を提供する。
地理的交通網の表示データ処理装置であって、好ましくは、データを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)は、(i)拡張交差地点の一部を形成するノードをデータベースから抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、(ii)規定された基準に基づいて、抽出されたノードに接続された拡張交差地点の一部を形成する少なくとも1つのエッジを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データを抽出手段は、好ましくは、規定の長さより短いエッジを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、データベース内の対応するフラグに基づいてエッジを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データ抽出手段は、好ましくは、(例えば関連するメモリを伴った処理装置から構成される)既に抽出された他のエッジに基づいてエッジを選択する手段を備える。
データを抽出する手段は、好ましくはエッジが立体交差、2車線道路及び中央分離帯のような道路人工物の要素である場合、そのエッジを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。更に、エッジが道路人工物かどうかを判定するため、エッジの周辺の交通網を分析する手段(例えば関連するメモリを伴った処理装置から構成される)を更に備えても良い。
地理的交通網を表示するデータ処理装置であって、好ましくは、少なくとも1つのノードと少なくとも1つのエッジを含む拡張交差地点に関連するデータベースからデータを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、拡張交差地点の一部を形成しなくても拡張交差点に接続された少なくとも1つのエッジを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
地理的交通網を表示するデータ処理装置であって、好ましくは、データを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、抽出されたデータを顧客の端末装置に送信する手段(例えば関連するメモリを伴った処理装置から構成される)と、抽出されたデータを実施の形態端末装置上に、好ましくは、概略図の形式で表示する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データを抽出する手段は、好ましくは、データベース内の他のノードを更に抽出することによって、更に拡張された交差地点に関連する他のデータを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、抽出ノードに接続される1つ以上の他のエッジを識別する手段(例えば関連するメモリを伴った処理装置から構成される)と、同じ、又は、更に規定される基準を満たす手段(例えば関連するメモリを伴った処理装置から構成される)と、更に拡張された交差地点に関連する他のデータを更に出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える。
本発明による他の実施の形態は、エッジを介して接続されたノードから形成された地理的交通網の表示データ処理装置であって、エッジを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、エッジが人工物であるかどうかを判定するために前記抽出されたエッジの付近の前記交通網の一部を分析する手段(例えば関連するメモリを伴った処理装置から構成される)と、分析の結果に従って抽出したエッジを処理する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える装置を提供する。
分析する手段は、好ましくは、抽出されたエッジの付近の交通網の一部の配置が規定の基準を満足するかどうかを判定する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。交通網は好ましくは、道路網が好ましく、道路網を分析する手段は、好ましくは、エッジが中央分離帯の一部を形成しているかどうかを判定する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
本発明による他の実施の形態は、地理的交通網の表示データ処理装置であって、a)データベースから前記データを検索する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)修正アルゴリズムに基づき前記データを処理する手段(例えば関連するメモリを伴った処理装置から構成される)と、c)前記処理データを出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える装置を提供する。
データを表示する装置であって、好ましくは、修正アルゴリズムによってデータを地形的に簡略化する手段(例えば関連するメモリを伴った処理装置から構成される)を備える装置である。データは複数のノードを含み、ノードの相対位置を調節する手段(例えば関連するメモリを伴った処理装置から構成される)を備える装置である。データは、好ましくは、複数のエッジを含み、少なくとも2つのエッジの間の相対角度を調節する手段(例えば関連するメモリを伴った処理装置から構成される)を備える装置である。
この相対角度を調節する手段は、少なくとも2つのエッジの相対角度を、優先する角度の組の1つにする(snaps)手段(例えば関連するメモリを伴った処理装置から構成される)と、少なくとも2つのエッジの相対角度を並行又は逆行に調節する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データを表示する装置であって、a)異なる要素のデータ間で、望ましい配置関係を識別する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)識別された望ましい関係を最も満足する配置を提供するため、要素の相対位置を調節する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える装置である。このデータは少なくとも1つのノードと、そのノードに接続された少なくとも1つのエッジとを含み、少なくとも1つの拡張交差点の出口を表わし、識別された望ましい関係を最も満足する配置を提供するため、交差地点の出口の相対位置及び/又は角度を調節する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データの表示装置は更に、地理的交通網の表示データを処理する方法は、規定された位置関係と要素の形状との類似点に対応した位置関係の強度を算出する手段(例えば関連するメモリを伴った処理装置から構成される)を更に含み、その位置関係は、並行又は逆行である。
データ処理装置は、好ましくは、データが少なくとも1つのノードとそのノードに接続された少なくとも1つのエッジを含む場合、互いに並行であるエッジ同士の関係に優先して、互いに逆行であるエッジ同士の関係を維持する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データが少なくとも1つのノードとそのノードに接続された少なくとも1つのエッジとを含む場合、データ処理装置は、好ましくは、1つ以上の前記エッジを、交差地点の出口として識別する手段(例えば関連するメモリを伴った処理装置から構成される)と、交差地点の出口をグループ化し交差地点出口群とする手段(例えば関連するメモリを伴った処理装置から構成される)とを含み、交差地点出口群は同じ点から発するように表示される。この装置は、好ましくは、その群の数を最小化する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データが少なくとも1つのノードとそのノードに接続された少なくとも1つのエッジとを含む場合、データ処理装置は、好ましくは、a)1つ以上のエッジを交差地点の出口として識別する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)前記交差地点出口のそれぞれの角度を決定する手段(例えば関連するメモリを伴った処理装置から構成される)と、c)前記交差地点出口の角度に基づいて前記データを修正する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データ処理装置は、好ましくは、異なる角度を持つ一連のポリライン線(polyline segment)によって交差地点の出口を定義する手段(例えば関連するメモリを伴った処理装置から構成される)と、表示する角度を決定するために前記ポリライン線を分析して、交差点出口の角度を決定する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データ処理装置は、好ましくは、抽出あるいは処理されたデータを出力する手段(例えば関連するメモリを伴った処理装置から構成される)を備え、出力する手段は、データを図形データとして出力し、好ましくは、概略図の形式の図形データとして、前記データを出力する手段(例えば関連するメモリを伴った処理装置から構成される)を含む。又、選択された画面の形状に合わせて図形データを調節する手段を備える。
データ処理装置は、好ましくは、ノードの対として経路を定義する経路データを取得する手段(例えば関連するメモリを伴った処理装置から構成される)と、ノードの1つの重要度を算出する手段(例えば関連するメモリを伴った処理装置から構成される)と、算出された重要度に基づき経路データを処理する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える。
これは、自動で提供され、そのため、地理的交通網の表示データを処理する手段(例えば関連するメモリを伴った処理装置から構成される)を備える装置は、ノードの対として経路を定義する経路データを受信する手段(例えば関連するメモリを伴った処理装置から構成される)と、ノードの1つの重要度の算出を行なう手段(例えば関連するメモリを伴った処理装置から構成される)と、算出された重要度に基づき経路データを処理する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える。
データ処理装置は、ノードの重要度を算出する手段を備え、重要度を算出する手段(例えば関連するメモリを伴った処理装置から構成される)は、重要か無意味かのどちらか1つとして分類する手段(例えば関連するメモリを伴った処理装置から構成される)を含む。
データ処理装置は、ノードの重要度を算出する手段を備え、重要度を算出する手段(例えば関連するメモリを伴った処理装置から構成される)は、ノードに接続された第1のエッジに対応する第1のパラメータと、ノードに接続された第2のエッジに対応する第2のパラメータを検索する手段(例えば関連するメモリを伴った処理装置から構成される)と、第1と第2のパラメータを比較する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
好ましくは、第1のパラメータは、第1のエッジに対応する等級を含み、第2のパラメータは、第2のエッジに対応する等級を含む。
それに替えて、あるいは、それに加えて、第1、第2のパラメータは第1、第2のエッジに対応する道路名を含む。
データ処理装置は、好ましくは、第1のエッジの道路名と第1のパラメータとを関連付け、第2のエッジの道路名と第2のパラメータとを関連付ける手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データ処理装置は、好ましくは、前記算出された重要度に基づき、経路を複数の経路区間に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データ処理装置は、好ましくは、複数の前記ノードのそれぞれの重要度を算出する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データ処理装置は、好ましくは、前記算出された重要度に基づいて経路を複数の経路区間に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
データ処理装置は、好ましくは、好ましくは、前記算出された重要度に基づいて経路を複数の経路区間に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を備え、経路を分割する手段は、2つの重要なノードによって分けられる経路区間を生成する手段(例えば関連するメモリを伴った処理装置から構成される)を含む。
データ処理装置は、好ましくは、経路を複数の経路区間に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を備え、経路は、始点ノードと終点ノードを有し、経路を分割する手段は、2つの重要なノード、あるいは、1つの重要なノードと1つの始点ノードと1つの終点ノードとによって分けられた複数の経路区間を生成する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データ処理装置は、好ましくは、経路を複数の経路区間に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を備え、経路を分割する手段は、複数の経路区間の内の1つが予定の長さを超えた区間である場合、その経路区間を更に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を含む。
データ処理装置は、好ましくは、経路を複数の経路区間に分割する手段(例えば関連するメモリを伴った処理装置から構成される)を備え、経路を分割する手段は、区間が規定された数以上の重要ではないノードを含む場合、複数の経路区間の1つを更に分割する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える。
本発明による他の実施の形態は、所在地の写実的な概略図を提供する装置であって、a)規定された抽出アルゴリズムに基づいてデータベースから1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)関心地点を含む写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、c)生成された写実的な概略図を出力する手段(例えば出力装置)とを備える装置を提供する。
所在地の写実的な概略図を提供する装置は、好ましくは、a)複数の関心地点のランク付けを行なう手段(例えば関連するメモリを伴った処理装置から構成される)と、b)関心地点のランクに基づいて1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
所在地の写実的な概略図を提供する装置は、好ましくは、a)各々の関心地点に関連付けられて記録された1つ以上のパラメータを検索する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)各々の関心地点に関連付けられて記録されたパタメータに対応した1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
所在地の写実的な概略図を提供する装置は、好ましくは、a)場所を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、選択された位置から規定半径内にある1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
複数のノードを含むデータベースである、所在地の写実的な概略図を提供する装置は、好ましくは、(a)ノードを抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)ノードの周辺の領域の範囲を決定する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)決定された領域内にある関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
所在地の写実的な概略図を提供する装置は、好ましくは、ノードの周辺の領域の範囲を決定する手段(例えば関連するメモリを伴った処理装置から構成される)は、ノードを中心とした円で領域を決定する手段(例えば関連するメモリを伴った処理装置から構成される)を含む。
所在地の写実的な概略図を提供する装置は、好ましくは、関心地点の視認性に基づいてデータベースから1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
所在地の写実的な概略図を提供する装置は、好ましくは、日時に基づいてデータベースから1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
所在地の写実的な概略図を提供する装置は、好ましくは、特定のユーザに関連する、気に入った関心地点のリストを記録する手段(例えば関連するメモリを伴った処理装置から構成される)と、リストに記録された関心地点を優先的に抽出する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
更なる様態において、本発明は、所在地の写実的な概略図を提供する装置であって、(a)道順を計算する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)計算された道順の表示を示す情報を含む写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)前記写実的な概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える装置を提供する。
所在地の写実的な概略図を提供する装置は、(a)道順を計算する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)計算された道順の表示を示す情報を含む写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)写実的な概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える装置を提供する。好ましくは、情報は、目印を含み、目印は、好ましくは、矢印である。
所在地の写実的な概略図を提供する装置は、好ましくは、交差地点に入る進入道路区間と、交差地点から出る進出道路区間とを有する交差地点を含む。所在地の写実的な概略図を提供する装置は、進入道路区間と進出道路区間との間の角度を決定する手段(例えば関連するメモリを伴った処理装置から構成される)と、手段(b)において、角度に基づいた前記情報を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
写実的な概略図内の矢印の数は、好ましくは、この角度に基づき変化する。
所在地の写実的な概略図を提供する装置は、好ましくは、(a)月や太陽の現在位置を決定する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)手段(a)で決定した月や太陽の現在位置を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
本発明による他の実施の形態において、所在地の写実的な概略図を提供する装置は、好ましくは、(a)月や太陽の現在位置を決定する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)決定した月や太陽の前記現在位置を示す情報を含む場所の写実的な外略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)前記概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える方法を提供する。情報は、好ましくは、目印を含む。
概略図内における目印の位置は、好ましくは、月や太陽の現在位置に対応する。目印は、投影画像を含み、投影画像の配置は月や太陽の現在位置に対応する。
本発明による他の実施の形態において、写実的な概略図を提供する装置は、(a)配置(configuration)データを受信する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)手段(a)において受信した配置データに基づいて写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)手段(b)において生成された写実的な概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える。
概略図は、好ましくは、端末装置に出力され、配置データは、好ましくは、端末装置の表示特性である。表示特性は、好ましくは、画面の解像度である。配置データは、好ましくは、ユーザの好みを示す。
本発明による他の実施の形態において、写実的な概略図を提供する装置は、a)データベースから交通網要素を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)規定された抽出アルゴリズムに基づいて、データベースから関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、c)手段a)において抽出された前記交通網要素と、手段b)において抽出された前記関心地点との間の地理的関係を測定する手段(例えば関連するメモリを伴った処理装置から構成される)と、d)手段c)において測定された前記地理的関係に基づいて、前記関心地点の抽象的表示を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、e)手段a)において抽出された交通網要素のセットと、手段d)において生成された前記関心地点の抽象的表示とを含む写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、f)前記写実的な概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを更に備える。
地理的関係は、好ましくは、エッジから関心地点への視認性に対応し、又は、エッジから関心地点を見た時のサイズに対応し、又は、エッジから関心地点までの距離に対応する。
好ましくは、関心地点の抽象的表示は、エッジに対する関心地点の正面の抽象的表現を含む。
本発明による他の実施の形態において、決められた地理的領域によって囲まれた所在地の写実的な概略図を提供する装置は、a)データベースから前記決められた領域から外れている1つ以上の関心地点を抽出する手段(例えば関連するメモリを伴った処理装置から構成される)と、b)前記決められた領域から外れている前記関心地点までの道順を示す表示を含む、決められた領域の写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、c)手段b)において生成された前記写実的な概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
写実的な概略図は、好ましくは、決められた地理的領域から外れた関心地点までの距離表示を含む。
写実的な概略図は、好ましくは、第1の情報源からの第1のソースデータと第2の情報源からの第2のソースデータを含む。
本発明による他の実施の形態において、写実的な概略図を提供する装置は、(a)第1の情報源から第1のソースデータを取得する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)第2の情報源から第2のソースデータを取得する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)前記第1のソースデータと前記第2のソースデータを含む写実的な概略図を生成する手段(例えば関連するメモリを伴った処理装置から構成される)と、(d)手段(c)において生成された前記写実的な概略図を出力する手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
写実的な概略図を提供する装置は、好ましくは、(a)第1の情報源において第1の地物を識別する手段(例えば関連するメモリを伴った処理装置から構成される)と、(b)第2の情報源において第2の地物を識別する手段(例えば関連するメモリを伴った処理装置から構成される)と、(c)第2の地物が第1の地物と重なるかどうかを測定する手段(例えば関連するメモリを伴った処理装置から構成される)と、(d)第2の地物が第1の地物と重なる場合、第2の地物と第1の地物を関連付ける手段(例えば関連するメモリを伴った処理装置から構成される)とを備える。
データや概略図は、中央サーバ(central server)から生成され、処理され、そして/又は、出力され、写実的な概略図を提供する装置は、好ましくは、顧客の移動端末装置にて、データや概略図を受信し、表示する手段(例えば関連するメモリを伴った処理装置から構成される)を備える。
地理的交通網の表示データを生成する装置は、移動端末装置を含み、好ましくは、無線ネットワークを介してサーバに接続される移動端末装置を含む。
本発明による他の実施の形態は、本明細書中に記述した方法を実行するために移動端末装置の形式を適用する。又、本明細書中に記述した方法を実行するために複数の移動端末装置と通信する手段(例えば関連するメモリを伴った処理装置から構成される)を含む中央サーバの形式も適用する。
本発明は、本明細書中に記述した装置や移動端末装置を含むシステムを提供する。
又、本発明は、本明細書中に記述した方法を実行するために適合したコンピュータプログラム製品を提供するとともに、更にコンピュータプログラム製品やそのコンピュータプログラム製品を明らかに実行する信号を保持する読み取り容易な記録媒体を提供する。
本発明による他の実施の形態は、上述した本発明のいずれかの実施の形態に示す方法を実現するための特徴を備える装置を提供する。通常、この装置は、適切な形式でプログラミングされたコンピュータである。好ましい例として、ユーザから離れた場所にある中央サーバの形をとる装置である。この場合、ユーザはLSB(Location Based Service)及び/又は顧客の移動端末装置である。
通常、中央サーバは概略図を生成し、LBS及び/又は顧客の移動端末装置に出力するように構成される。移動端末装置(通常、携帯端末装置)は(通常写実的な形式で)概略図を受信及び表示するように、ユーザのために適切に構成される。
本発明は、移動端末装置において実行する本明細書中に記載の方法と、本明細書中の記載した方法を実行する顧客の移動端末装置、及び/又は、本明細書中の記載の装置の特徴を具現することを提供する。
所在地の写実的な概略図を提供する周知の方法及び装置は、地理的交通網の表示データを生成するため、自由に改良しても良く、又、その逆でも良い。
ここに記述した方法及び装置において、概略図や経路情報は図形的な形式でユーザに表示されても良い。その代わりに、あるいは、それに加えて、概略図や経路情報は、テキストや音声のような図形ではない形式でユーザに表示されても良い。写実的な概略図は、通常、従来の地図データから合成、又は、生成され、様々な情報元から生成され、関心地点、例えばビル、のような背景情報を含む。好ましくは、概略図は、例えば、道路の長さ、地物の相対角度や相対位置等のような地形地物が示す特徴を変えることで、基礎データを簡略化した画像を提供する。実施の実施の形態において、概略図は、簡略化していない、又は、正確に描かれた抜粋した地図を構成しても良い。
ここで記述した方法や装置の特徴は、通常、経路指定アプリケーションや経路指定システムの一部に使用され得る。これは、移動端末ユーザに対し経路指定情報を提供する経路指定サービスでも、好ましくは、携帯電話を介して歩行者に対する経路指定サービスでも良い。
この経路指定情報は、通常、道路、歩道及びその他ユーザが通行する通路である。一例としては、見本市や博覧会中で機能するサービスであり、例えば、ユーザは好みの店を探すことができる。
本発明は、又、本明細書中に記載の方法を実行するコンピュータプログラム及びコンピュータプログラム製品、及び/又は、本明細書中に記載の装置の特徴を具現すること、及び、本明細書中に記載の方法を実行するためのプログラムが記録され保持している、読み取り容易な記録媒体、又は、持ち運び可能な記録媒体(例えば、ディスク)、及び/又は、本明細書中に記載の装置の実施の実施の形態を提供する。
本発明は、又、本明細書中に記載の方法を実行するためのコンピュータプログラムを実現する信号、及び、又は、本明細書中に記載の装置の特徴を実現する信号、及び、本明細書中に記載の方法に基づき生成される写実的な概略図やその他の地理的交通網の表示データを実現する信号、及び、これらの信号を転送する方法、及び、本明細書中に記載の方法を実行するためのコンピュータプログラムをサポートするオペレーションシステムを持つコンピュータ装置、及び/又は、本明細書中に記載の装置の実施の実施の形態を提供する。
ハードウェアで実行された特徴は、通常、ソフトウェア上で実行されても良く、その逆でも良い。従って、本明細書中に記載ソフトウェアやハードウェアの特徴は、言及したものと解釈する。
本発明の実施の形態の特徴は、本発明の他の実施の形態に適切に組み合わせて応用しても構わない。特に、方法の実施の形態は、装置の実施の形態に応用しても、その逆でも構わない。
1 概要
1−1 構成
図1は基本的なシステムハードウェアの構成を示す。位置案内サーバ1は、データベース2と通信ネットワーク3に接続する。通信ネットワーク3は、ワイヤレスで移動端末4と通信する。又、LBSサーバ(Location Based Server)10も通信ネットワーク3に接続する。
1−1 構成
図1は基本的なシステムハードウェアの構成を示す。位置案内サーバ1は、データベース2と通信ネットワーク3に接続する。通信ネットワーク3は、ワイヤレスで移動端末4と通信する。又、LBSサーバ(Location Based Server)10も通信ネットワーク3に接続する。
1−1−1 移動端末
移動端末4は、携帯電話やPDAに例示される。携帯端末4は、固定設置されたインターネット閲覧のための機器と比較すると、スクリーンは極めて小さく、データ転送率は低く、かつユーザインターフェイスが限定されている。ここでは2つの異なる分類の移動体端末、つまり小型端末と中型端末について説明する(しかし他の実施例においては異なる種類の端末が用いられる)。
移動端末4は、携帯電話やPDAに例示される。携帯端末4は、固定設置されたインターネット閲覧のための機器と比較すると、スクリーンは極めて小さく、データ転送率は低く、かつユーザインターフェイスが限定されている。ここでは2つの異なる分類の移動体端末、つまり小型端末と中型端末について説明する(しかし他の実施例においては異なる種類の端末が用いられる)。
小型端末と中型端末は、画面の解像度やカラー/モノクロ表示、通話方式といった点において、異なる特徴を有する。例えば、WAP方式(Wireless Application protocol)の携帯電話(例えばシーメンスS45)といった小型端末は、一般に、小型のモノクロディスプレイを有し、ユーザ間の接続には、標準の携帯電話のボタンとWAPメニュー方式を用いる。一方、中型端末は、もう少し高い解像度のスクリーン(一般には120×120ピクセルよりも大きい)でカラーのディスプレイを有する。例えば、Trium Eclipse携帯電話が例示される。小型端末と中型端末のための情報は、通常異なるものであり、端末の異なる特徴を考慮に入れたものである。
中型端末に用いられる手法は、より大型の端末、例えばコンパックIpaqやノキア9210に適用可能である。これらはより高い解像度のカラーディスプレイを有し、ポイントアンドクリックインターフェイスを用い、スタイラスペンにより操作しても良い。それ故、「中型端末」はこのような端末を含むものである。実際のところ、小型及び中型端末について説明される技術は、どのようなサイズの端末に適用してもよい。更に、以下で述べる中型端末の概要は、ユーザのパフォーマンスに従い、1つの交差地点に対する視点に限定する場合は特に、小型端末に対しても用いることができる。
又、携帯端末4は、GPRS(General Packet Radio Service)端末であってもいい。
実施例のいくつかにおいては、経路指定サービスという側面は携帯端末において実行されるソフトウェアによって実現される。例えば、携帯端末は、Java仮想マシーンや、Javaスクリプトのようにスクリプト処理を実行可能なブラウザを構成する。
1−1−2 サーバ
位置案内サーバ1は、位置認識と、経路の概略図といった経路指定情報の生成ためのソフトウェアサーバー有し、かつ位置案内サーバのユーザとデータベース2のためのインターフェイスとを有する。
位置案内サーバ1は、位置認識と、経路の概略図といった経路指定情報の生成ためのソフトウェアサーバー有し、かつ位置案内サーバのユーザとデータベース2のためのインターフェイスとを有する。
概略図
位置案内サーバ1から提供される情報は、一般に”概略図“の形式である。当該概略図は画像データのかわりに、つまり、テキストや音声データである場合がある。しかしながら、ほとんどの場合、概略図は、簡略地図の形式で画像データを含み、それは通常のマッピングや地理データから得たものである。概略図の画像形式は、ビットマップ、JPEG、GIF、PNG及びベクトル画像などの形式でよい。概略図は、WAPやHTTPなどの標準のプロトコルやその他の適当なプロトコルによって移動端末に送信される。
位置案内サーバ1から提供される情報は、一般に”概略図“の形式である。当該概略図は画像データのかわりに、つまり、テキストや音声データである場合がある。しかしながら、ほとんどの場合、概略図は、簡略地図の形式で画像データを含み、それは通常のマッピングや地理データから得たものである。概略図の画像形式は、ビットマップ、JPEG、GIF、PNG及びベクトル画像などの形式でよい。概略図は、WAPやHTTPなどの標準のプロトコルやその他の適当なプロトコルによって移動端末に送信される。
概略図は、経路処理やその他の処理にとって有用で必要な情報のみを有する。例えば、概略図は一般的に、道路の道筋の表示されるとともに、目印となる建物やランドマークといった関連する情報を含む。
この種の関連情報は、関心地点(POIs)として参照される。概略図には一般に、ユーザがその特徴となる様々な地点を認識できるように、テキスト情報が添付されている。
経路図の種類
様々な図形の種類が利用可能であり、その各々が経路案内過程において重要な役割を果たす。主な種類は、方向図、位置図、経路図の3つである。
様々な図形の種類が利用可能であり、その各々が経路案内過程において重要な役割を果たす。主な種類は、方向図、位置図、経路図の3つである。
方向図は、ユーザが経路を辿る前に、現在の自己の位置を把握するためのものである。位置図は方向図と似ているが、経路とは関連しないものであり、単に周辺の地理の概観を提供するものである。
経路図は、矢印のような記号や、要求される道路をハイライト表示することで、現在の経路をユーザに示すものである。経路図は更に、交差図と非交差図に分類される。交差図は、2又はそれ以上の道路が交差する場所で、どのように進むべきかをユーザに示すものである。
非交差図は、主要な交差地点を含まない経路上にあるランドマークを表示し、ユーザは経路をどれだけ進んだか計測することができる。
経路図は通常、経路の一部を表示するが、経路全体を表したものは概要図によって提供される。
作成された経路図の特徴は、携帯端末4の機能性に一部依存する。一般的に、より詳細な経路指定情報は、小型の携帯端末よりも、大型又は中型の携帯端末により表示され得る。端末は、ユーザに対して図形画像によって表現する代わりに、テキストのみの形式により、又はそれに対応する音声とともに表現してもよい。
経路指定サービスは、従来の携帯端末に基づき、図形の最適な形式を作成する。その形式はユーザ情報のデータベースに格納されていても、各端末からの経路リクエストを受けて転送されても、あるいはそれぞれの経路設定の最初に設定されてもよい。
小型画面用経路指定図
小型画面の端末においては、以下の経路図が一般的である。
・交差図:交差地点において、交差地点の詳細で正確な表示、又は、単純に簡略された表示が行われ、それとともに交差地点を通過する動きを示す矢印と、ユーザがどこにいるのか確認するために用いられる。
・非交差図:交差地点間において、簡略化された道路の道筋や手がかりとなる関心地点を表示する。
要求に応じて、非交差図は省略され、交差図のみが表示されてもよい。
小型画面の端末においては、以下の経路図が一般的である。
・交差図:交差地点において、交差地点の詳細で正確な表示、又は、単純に簡略された表示が行われ、それとともに交差地点を通過する動きを示す矢印と、ユーザがどこにいるのか確認するために用いられる。
・非交差図:交差地点間において、簡略化された道路の道筋や手がかりとなる関心地点を表示する。
要求に応じて、非交差図は省略され、交差図のみが表示されてもよい。
中型画面用経路図
中型画面の端末においては、以下の経路図が一般的である。
・経路の区間の連続した概略図。ユーザは経路を進むにつれ、これらの連続図を段階的に通過する。
・ディスプレイのそれぞれは、複数の交差地点と経路をカバーし、その経路は各々の交差地点間の区間とその通過を示している。
・交差地点間や交差地点の周辺にある選択された関心地点(ランドマーク・建物・街路備品)が表示される。
交差地点では、最も詳細な表示がなされる。交差地点の数は普通2つであるが、変化してもよい。
中型画面の端末においては、以下の経路図が一般的である。
・経路の区間の連続した概略図。ユーザは経路を進むにつれ、これらの連続図を段階的に通過する。
・ディスプレイのそれぞれは、複数の交差地点と経路をカバーし、その経路は各々の交差地点間の区間とその通過を示している。
・交差地点間や交差地点の周辺にある選択された関心地点(ランドマーク・建物・街路備品)が表示される。
交差地点では、最も詳細な表示がなされる。交差地点の数は普通2つであるが、変化してもよい。
大型画面用経路図
中型画面と同じように、一般に、1つ以上の交差地点がスクリーンごとに表示される。
中型画面と同じように、一般に、1つ以上の交差地点がスクリーンごとに表示される。
1−1−3 LBS
地理情報サービス(LBS;Location Based Service、あるいは、Location Based Applicationとして知られる。)は、通信ネットワーク3に接続する第2のサーバであるLBSサーバ10において駆動する。LBSは、案内サーバ1の位置案内サービスをより広範囲なアプリケーションの一部として利用するものである。そのようなアプリケーションの例は多々考えられるが、一例としては、レストランガイドである。ユーザの現在位置の付近にあるレストランに関する、その紹介や行き方などの情報を、ユーザに対して提供する。本実施例においては、サービスはLBSにより提供されるが、ある実施例においては、位置案内サーバ1が当該サービスを提供してもよい。例えば、通信ネットワーク3を経由して、直接携帯端末へ配信する正確な位置情報・案内サービスである。
地理情報サービス(LBS;Location Based Service、あるいは、Location Based Applicationとして知られる。)は、通信ネットワーク3に接続する第2のサーバであるLBSサーバ10において駆動する。LBSは、案内サーバ1の位置案内サービスをより広範囲なアプリケーションの一部として利用するものである。そのようなアプリケーションの例は多々考えられるが、一例としては、レストランガイドである。ユーザの現在位置の付近にあるレストランに関する、その紹介や行き方などの情報を、ユーザに対して提供する。本実施例においては、サービスはLBSにより提供されるが、ある実施例においては、位置案内サーバ1が当該サービスを提供してもよい。例えば、通信ネットワーク3を経由して、直接携帯端末へ配信する正確な位置情報・案内サービスである。
1−1−4 データベース
データベース2は、位置案内サーバ1が位置認識及び案内情報の生成するのに用いる地理情報を格納する。その地理情報は、道路、道路の名称及び分類、建物及び建物の名称、商業施設及び商業施設の分類の情報、詳細な住所データ、その他の地理上・地図上の属性に関するデータを含む。実施の形態によっては、データベース2は単一同質のデータベースである。本実施例においてはデータベース2は、複数のデータベースやファイルといった、いくつかの異なったデータソースを構成する。
データベース2は、位置案内サーバ1が位置認識及び案内情報の生成するのに用いる地理情報を格納する。その地理情報は、道路、道路の名称及び分類、建物及び建物の名称、商業施設及び商業施設の分類の情報、詳細な住所データ、その他の地理上・地図上の属性に関するデータを含む。実施の形態によっては、データベース2は単一同質のデータベースである。本実施例においてはデータベース2は、複数のデータベースやファイルといった、いくつかの異なったデータソースを構成する。
本システムに用いられる全てのデータは、市販されているもので利用できる。イギリスにはそうした代替となるデータソースが大量にあり、他の国においても、様々な範囲や精度の度合いで同様のものがある。
イギリスでは、以下のように様々な分類のデータが利用できる。
・広範囲地図製作データ(例えばOrdnance Survey MasterMap)このデータは、ビルの形のデータを含み(例えば、これは関心地点の算出に用いられる)、又は、図上に表わされる川や公園といった地物の場所を示すことに用いてもよい。後述するように、通常、概略図は、略図的に表現された交差地点を表示するか、あるいは基準となる交差地点をカバーした地図製作データから引き出した小さいが正確な描画(つまり小さな地図)によって表示され、それらは、ハイライト表示及びラベル付けされた関心地点となる建物の概要とともに表示される。
・道路網データ(例えばTeleAtlas)
このデータは、道路と道路の接続(例えば交差点)、交差はしているが接続していない道路の不通(例えば立体交差)、道路の分類(例えば高速道路、幹線道路、一般道、歩行者用通路/道路)、道路の配置を複雑にすることになる道路の図形的分離(例えば、ジャンクション、迂回路、中央分離帯のある幹線道路)といったデータを含む。同様のデータは、NavTechやOrdnance Surveyからも入手できる。
・関心地点データ(例えばE−street や Ordnance Survey Address Point)このデータは、ある地点の属性と分類からなり、それらは、世間で関心が寄せられるであろうことについての地物や詳細な情報を示す(例えば、小売店やレストラン、ランドマークなどである)。Ordnance Survey Address Pointデータは、国内のあらゆる住所の地点に関する情報を有するが、いわゆる“定番”の情報のみを有する。つまり、名称(場合によっては、特に会社名)、電話番号や郵便番号といったものである。E−streetデータは、識別する地点の数は少ないものの、その地点が有する情報について、より詳細な分類と情報を示す。関心地点データは関心地点選択ステップにおいて用いられる。
・広範囲地図製作データ(例えばOrdnance Survey MasterMap)このデータは、ビルの形のデータを含み(例えば、これは関心地点の算出に用いられる)、又は、図上に表わされる川や公園といった地物の場所を示すことに用いてもよい。後述するように、通常、概略図は、略図的に表現された交差地点を表示するか、あるいは基準となる交差地点をカバーした地図製作データから引き出した小さいが正確な描画(つまり小さな地図)によって表示され、それらは、ハイライト表示及びラベル付けされた関心地点となる建物の概要とともに表示される。
・道路網データ(例えばTeleAtlas)
このデータは、道路と道路の接続(例えば交差点)、交差はしているが接続していない道路の不通(例えば立体交差)、道路の分類(例えば高速道路、幹線道路、一般道、歩行者用通路/道路)、道路の配置を複雑にすることになる道路の図形的分離(例えば、ジャンクション、迂回路、中央分離帯のある幹線道路)といったデータを含む。同様のデータは、NavTechやOrdnance Surveyからも入手できる。
・関心地点データ(例えばE−street や Ordnance Survey Address Point)このデータは、ある地点の属性と分類からなり、それらは、世間で関心が寄せられるであろうことについての地物や詳細な情報を示す(例えば、小売店やレストラン、ランドマークなどである)。Ordnance Survey Address Pointデータは、国内のあらゆる住所の地点に関する情報を有するが、いわゆる“定番”の情報のみを有する。つまり、名称(場合によっては、特に会社名)、電話番号や郵便番号といったものである。E−streetデータは、識別する地点の数は少ないものの、その地点が有する情報について、より詳細な分類と情報を示す。関心地点データは関心地点選択ステップにおいて用いられる。
本システムに用いられるデータは他の提供装置(suppliers)のものであってもよい。
1−1−5 ソフトウェア構成
位置案内サーバ1は、データベース2との連係により、位置・経路・案内についての“ウェブサービス”を提供する。そのウェブサービスは、インターネットプロトコル等により、LBSサーバ10において駆動するLBSにアクセス可能である。当該ウェブサービスは、LBSディベロッパーにAPI(Application Program Interface)を提供する。
位置案内サーバ1は、データベース2との連係により、位置・経路・案内についての“ウェブサービス”を提供する。そのウェブサービスは、インターネットプロトコル等により、LBSサーバ10において駆動するLBSにアクセス可能である。当該ウェブサービスは、LBSディベロッパーにAPI(Application Program Interface)を提供する。
このウェブサービスを提供するソフトウェア構成を、より詳細に図2を参照して以下説明する。位置案内技術は以下のような階層を有する。
・ウェブサービスインターフェイス40がAPIとインフラを提供することで、LBSは位置案内技術にアクセス可能となり、位置案内技術はLBSについて複数のユーザを管理できるようになる。
・サービスモジュール42は位置案内サービスにおける様々な面を提供するソフトウェアモジュールであり、位置を認識し、略図を生成する。
・地物データモデル44はサービスモジュールをサポートするデータモデルである。
・地物データ蓄積部46はデータの全般的な管理のための装置であり、プログラムのソースを問わず全てのデータに対する、共通、単一のインターフェイスを提供している。
・コネクタ48はインターフェイスモジュールであり、異なる形式でディスクに格納されているデータを効率的にアクセス可能とし、地物データ蓄積部の階層において共通のインターフェイスを経由して、システムのより上位の部位で表現される。
・データソース50は、ディスクにおけるファイル又はデータベースあるいはその両方であり、それらの形式は、外部から供給されたデータベースにおける外部形式であるか、適当な形式のいずれかである。
・ウェブサービスインターフェイス40がAPIとインフラを提供することで、LBSは位置案内技術にアクセス可能となり、位置案内技術はLBSについて複数のユーザを管理できるようになる。
・サービスモジュール42は位置案内サービスにおける様々な面を提供するソフトウェアモジュールであり、位置を認識し、略図を生成する。
・地物データモデル44はサービスモジュールをサポートするデータモデルである。
・地物データ蓄積部46はデータの全般的な管理のための装置であり、プログラムのソースを問わず全てのデータに対する、共通、単一のインターフェイスを提供している。
・コネクタ48はインターフェイスモジュールであり、異なる形式でディスクに格納されているデータを効率的にアクセス可能とし、地物データ蓄積部の階層において共通のインターフェイスを経由して、システムのより上位の部位で表現される。
・データソース50は、ディスクにおけるファイル又はデータベースあるいはその両方であり、それらの形式は、外部から供給されたデータベースにおける外部形式であるか、適当な形式のいずれかである。
例えば、図1にもどって参照すると、LBSサーバ10と携帯端末4の相互関係に従い、LBSサーバ10は経路指定要求を位置案内サーバ1に対して行なう。ここで図2を参照すると、この経路指定要求はウェブサービスインターフェイス40に受信され、適切なサービスモジュール42から適当な1つ(場合によっては複数)を起動する。そして、その起動したモジュールは、要求されているデータを、データモデル44を用いて、地物データ蓄積部46から、更に要求する。更に地物データ蓄積部46は、要求されたデータのソースを識別し、適切なコネクタ48を用いて、データソース50から1又はそれ以上のデータを引き出す。
1.1.6 索引方法
地形地物の索引の方法について、以下説明する。その方法は、所定のエリアの地物を見つけ出すために本システムによって用いられる。索引方法においては、大きな地図(例えばイギリスの地図)を区画ごとに格子状に分割する。ある区画は他の区画と異なるサイズであるというように、その格子は必ずしも統一されたものでなくてもよい。区画のそれぞれは、区画によって表現される地図上のエリア内の地物のリストを有し、その区画には、道路あるいは、移動経由地や店舗といった関心地点が含まれる。一般に大きな区画は、地物の密度が低い地図上のエリアを表現する際に用いられ、一方、地物の密度が高いエリア(例えば都市部)については小さな区画により表現される。各区画はそれぞれ異なるサイズであるため、既に知っている座標を使うことのみによっては、正確な区画を直接示すことはできない。それ故、下位の階層へ連続的に展開するように、区画の複数の階層が提供される。つまり、最上位層において単一の区画が広いエリアをカバーし、上位層の区画が含まれている次の階層において、全ての区画がリストアップされる。
地形地物の索引の方法について、以下説明する。その方法は、所定のエリアの地物を見つけ出すために本システムによって用いられる。索引方法においては、大きな地図(例えばイギリスの地図)を区画ごとに格子状に分割する。ある区画は他の区画と異なるサイズであるというように、その格子は必ずしも統一されたものでなくてもよい。区画のそれぞれは、区画によって表現される地図上のエリア内の地物のリストを有し、その区画には、道路あるいは、移動経由地や店舗といった関心地点が含まれる。一般に大きな区画は、地物の密度が低い地図上のエリアを表現する際に用いられ、一方、地物の密度が高いエリア(例えば都市部)については小さな区画により表現される。各区画はそれぞれ異なるサイズであるため、既に知っている座標を使うことのみによっては、正確な区画を直接示すことはできない。それ故、下位の階層へ連続的に展開するように、区画の複数の階層が提供される。つまり、最上位層において単一の区画が広いエリアをカバーし、上位層の区画が含まれている次の階層において、全ての区画がリストアップされる。
検索アルゴリズムは、区画の序列の下方を検索することで、正確な区画を識別する。こうして検索アルゴリズムは、実際の地図上のエリアをカバーし、そのエリア内の地物をリストアップした最終的な区画(最も展開されたもの)に至るまで検索をする。
この検索方法の利点は、特定の地図上のエリアに関連する全ての情報に素早くアクセスすることが容易なことである。もし、1つの区画が目標地点をカバーできない場合は、複数の周囲を囲む区画が試される。実施例よっては、別個の複数のサーバが、特定のエリアをカバーする情報を、各々のキャッシュに格納している。
1.2 サービス概要
一般的には、位置案内サーバ1は、サービスモジュール42によって実行される以下のサービスを提供する。
・移動体端末のユーザの現在位置を識別する。
・ユーザの希望する行き先を識別する。
・ユーザの現在位置から希望する行き先までの経路に関する経路指定情報を生成する。
一般的には、位置案内サーバ1は、サービスモジュール42によって実行される以下のサービスを提供する。
・移動体端末のユーザの現在位置を識別する。
・ユーザの希望する行き先を識別する。
・ユーザの現在位置から希望する行き先までの経路に関する経路指定情報を生成する。
個人位置情報サービス(ILBS; Individual Location Based Services)は、提供されたサービスの画面のみを用いても良い。例えば、LBSサーバ10は、要求のパラメータとして位置の始点と終点を与えて、経路指定情報のみを要求しても良い。
代わりに、これらのサービスは結合され、3つのステップを結びあわせることで完全な位置案内サービスを提供する。3つのステップとは、移動端末の現在位置を認識し、希望する場所を認識し、現在位置と希望場所の間の経路指定情報を提供することである。
1.3 経路指定サービスの一例
位置案内サービスの一例を図3を用いて以下概説する。
位置案内サービスの一例を図3を用いて以下概説する。
経路指定及び位置に関連するクエリが、通信ネットワーク3を経由して移動端末4から、経路指定アプリケーション100によって受信される。経路指定アプリケーションは、経路サービスのユーザとの相互関係を管理する。ユーザインターフェースは、例えばWAP(Wireless Application Protocol)サイトの形式においてといったように、経路指定アプリケーションの一部として提供される。ユーザインターフェースによって、ユーザは経路の始点、終点に関する情報を入力したり、経路指定情報の要求したりといった処理が可能になる。
始点/終点モジュール110は、経路指定要求に対して、あるいは、移動端末の位置の決定のために、始点・終点の選択/決定といったサービスを経路指定アプリケーションに提供する。移動端末4の位置に関する位置情報の収得が求められた場合には、通信ネットワーク3からネットワーク固定モジュールを用いて収得する。経路指定アプリケーション100は、ユーザクエリに基づいて経路指定要求を生成し、経路指定サブシステム200へ送信する。経路指定要求は、例えば、経路指定情報を生成するための経路を定義づける2以上の地図上の座標を有しても良い。
経路指定サブシステム200は、ルータ210、関心地点セレクタ220、経路セグメンタ230及び概略図ジェネレイタ240を具備する。ルータ210は、受信した経路指定要求に基づいて経路を認識する。関心地点セレクタ220は、ユーザが経路に従って進行するのを補助するための、経路上の関連する関心地点を選択する。経路セグメンタ230は、経路を部分ごとに別々に表示できるように、経路を分割する。概略図ジェネレイタ240は経路区間の概略図を生成し、あるいは、経路の概略図や位置や方向を示す図形といった他の種類の図形を生成してもよい。
始点/終点モジュール110と経路指定サブシステム200は、地形情報にアクセスするためにデータベース2と通信する。ユーザプロフィールマネージャー120は、本システムの登録されたユーザに関する情報を管理し、その情報はユーザプロフィールデータベース(図示せず)に保持される。実施例によっては、いくつかの、あるいは全てのユーザ関連情報は、ユーザプロフィールデータベースの代替あるいは補完として移動端末に保持される。
ユーザプロフィールは、以下のように様々な種類のユーザ情報を含んでも良い。
・識別情報(例えば、ユーザの携帯電話番号や携帯端末の機種)
・利用履歴(例えば、最近行った場所や頻繁に行く場所)
・お気に入り情報(例えば好みの始点/終点、好みの関心地点、好みのソフトウェア構成)、具体的にいうと、お気に入りのリストとして、ユーザプロフィールには、よく利用する場所の情報が格納されている。これは“マイプレイス”リストと呼ばれる。
・識別情報(例えば、ユーザの携帯電話番号や携帯端末の機種)
・利用履歴(例えば、最近行った場所や頻繁に行く場所)
・お気に入り情報(例えば好みの始点/終点、好みの関心地点、好みのソフトウェア構成)、具体的にいうと、お気に入りのリストとして、ユーザプロフィールには、よく利用する場所の情報が格納されている。これは“マイプレイス”リストと呼ばれる。
ユーザは、自分の携帯端末4を用いて(例えばWAPサイトを経由して)、ユーザプロフィールマネージャー120と通信してもよいし、あるいは、通信ネットワーク3に接続するコンピュータ端末5といった他の端末を用いて(例えば、インターネット、WWW経由で通信してもよい。又、ユーザは自身のユーザプロフィールを希望により更新してもよい。
経路指定アプリケーション100と経路指定サブシステム200は、経路サービスと、ユーザプロフィールに格納された情報に基づいて生成された経路指定情報をカスタマイズする。ユーザプロフィールはユーザプロフィールマネージャー120を介してアクセスする。更に経路指定アプリケーション100はユーザとのやり取りに応じてユーザプロフィールマネージャー120を介してユーザプロフィールを更新してもよい。一例として、経路指定アプリケーション100によって、ユーザはユーザプロフィールに格納されているお気に入りの場所リストに場所を追加することもでき、ユーザプロフィールに格納されているユーザの経路指定クエリに関連する履歴情報を自動的に記録することもできる。
2.経路指定サブシステム概要
図3を再び参照すると、経路指定アプリケーション100はユーザとのやり取りに対応して経路指定要求を生成し、始点と終点との間の経路が識別される。この経路指定要求は一般に、識別された始点と終点の座標からなる。経路指定要求は経路指定サブシステムに送られる。
図3を再び参照すると、経路指定アプリケーション100はユーザとのやり取りに対応して経路指定要求を生成し、始点と終点との間の経路が識別される。この経路指定要求は一般に、識別された始点と終点の座標からなる。経路指定要求は経路指定サブシステムに送られる。
このような経路指定要求に対応して、経路指定サブシステム200において以下の処理が実行される。
・ルータ210が要求された経路を識別する。
・関心地点セレクタ220が経路上にある関心地点を選択する。
・経路セグメンタ230が経路を分割する。
・概略図ジェネレイタ240が一連の経路の最初の概略図を生成する。
・ルータ210が要求された経路を識別する。
・関心地点セレクタ220が経路上にある関心地点を選択する。
・経路セグメンタ230が経路を分割する。
・概略図ジェネレイタ240が一連の経路の最初の概略図を生成する。
ここで、生成された概略図は、ユーザに対して表示するために、経路指定アプリケーション100に送り返される。ユーザが次の経路の概略図を要求した場合、経路指定アプリケーション100は、更新された経路指定要求を経路指定サブシステム200に送信する。これに対応して次の経路の概略図が概略図ジェネレイタ240により生成される。
3.ルータ
ルータを以下に説明する。
ルータを以下に説明する。
TeleAtrasのような地理データソースは、相互に接続するノード同士の道路網として道路情報を提供する。そこでは、エッジが道路区間を表現し、ノードが道路区間の交差点を表現している。道路を表現することと同様に、エッジは、歩道あるいは、歩行者が進入可能な何らかの場所もまた表現する。出発地点から目的地までの道路網におけるノードとノードを結ぶ通路を認識することによって、要求された経路が見出される。
経路指定要求において特定される始点と終点が結び付けられた座標は、厳密には、道路網におけるノード上又は道路区間上に存在するわけではない。例えば、データの提供者は、あるビルを特定する際に、そのビルの範囲内にあるある場所の座標を用いる。この場合、対応する道路網上のノードは、始点又は終点座標に最も近い道路区間を検索することで算出される。仮に住所が始点又は終点座標と結び付けられている場合は、住所と照合する道路区間のみが検索対象となる。このように検索を限定することで、ビルの入口に該当する道路網上のポイントを見つけ出す可能性が高まる。
3.1 最短経路に基づく経路選択
選択される経路は、距離的に、あるいは所要時間のいずれかにおいて最短の経路である。経路指定情報が歩行者を対象としており、その歩行スピードが道路(又は歩道)種類を問わずにおよそ一定である場合、距離が最短である道と所要時間が最短である道とは同一となる場合が多い。それ故、距離情報がデータベースから利用可能であるならば、最短の道は、距離において最短という意味で算出される。
選択される経路は、距離的に、あるいは所要時間のいずれかにおいて最短の経路である。経路指定情報が歩行者を対象としており、その歩行スピードが道路(又は歩道)種類を問わずにおよそ一定である場合、距離が最短である道と所要時間が最短である道とは同一となる場合が多い。それ故、距離情報がデータベースから利用可能であるならば、最短の道は、距離において最短という意味で算出される。
これは、従来からの道検出アルゴリズムを用いることで達成できる。例えば、ルータは始点から、次のノードに到達する、考えられる全てのエッジを、それぞれ探索する。ルータはそれらを部分的な経路の候補として蓄積する。新たなノードに到達するたびに、ルータは、次のノードに到達する可能性のあるエッジの全てを検索し、再び、そのエッジのそれぞれを部分的な経路の候補のセットとして蓄積する。これが目的地に到達するまで行われる。更に発展した有効なバージョンにおいては、概算された行程全体の移動コスト(例えば、現在までの距離、現時点での経路から目的地までの直線距離を加えたもの)が、部分的な経路の候補に割り当てられる。どの段階においても、全体的な移動コストが最も低く見積もられた部分的経路のみが探索される。一度、1つの経路が行き先まで到達すると、その経路の実際の移動コストよりも低く見積もられた部分的経路のみが、更に探索される。この結果、最も低い移動コストがより早く決定されることになる。経路の最も低い移動コストの全体的な見積もりの手法は、単純な移動である場合以外の移動コストの算出が要求される場合は、多様に変更されうる。
3.2 ユーザプロフィールに基づく経路選択
もうひとつの手法として、経路選択はユーザプロフィールに基づくものか、あるいは移動端末4に格納されたものであってもよい。例示すると、ユーザプロフィールにより、最も無難な経路を識別し、探しあてるように、経路選択の機械的手順が特定されるものであってもよい。(例えば、選択される道路の一部に、小道や主要でない道路を選択しないことなどである。)
もうひとつの手法として、経路選択はユーザプロフィールに基づくものか、あるいは移動端末4に格納されたものであってもよい。例示すると、ユーザプロフィールにより、最も無難な経路を識別し、探しあてるように、経路選択の機械的手順が特定されるものであってもよい。(例えば、選択される道路の一部に、小道や主要でない道路を選択しないことなどである。)
3.3ユーザの入力に基づく経路選択
最後に、ユーザは特定の経路を選択することもでき、あるいは特定の視点に立って選択された経路又はその他の条件に従った経路を選択することができるものであってもよい。これらは、経路指定要求の変更を媒介するものとして提供される。
最後に、ユーザは特定の経路を選択することもでき、あるいは特定の視点に立って選択された経路又はその他の条件に従った経路を選択することができるものであってもよい。これらは、経路指定要求の変更を媒介するものとして提供される。
3.4経路周辺の道路網構成の構築
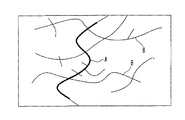
経路が識別された後、前記経路の外側の道路網の構成を有するデータセットが、前記経路の周辺に構築される。一例として、図4に示す道路網を介した経路について以下述べる。経路それ自身はAで示す。Bで示された道路は主要道路であり、他は主要でない道路である。この種の分類は地図データにおいて一般的なものである。(TeleAtlasの標準的データにも用いられ、同様のデータセットは、NavTechやOrdnanceSurveyにおいても利用されうるものである。)
経路が識別された後、前記経路の外側の道路網の構成を有するデータセットが、前記経路の周辺に構築される。一例として、図4に示す道路網を介した経路について以下述べる。経路それ自身はAで示す。Bで示された道路は主要道路であり、他は主要でない道路である。この種の分類は地図データにおいて一般的なものである。(TeleAtlasの標準的データにも用いられ、同様のデータセットは、NavTechやOrdnanceSurveyにおいても利用されうるものである。)
経路“A”から開始すると、外側の道路網の構成のデータセットが、距離の設定された(この時点で80m)経路Aから伸長する。伸長アルゴリズムが元の経路と同等かそれ以上に重要な道路に続き、それらの一部をデータセットに付加し、これらの道路を“経路構成”と分類する。重要度の低い道路は支線(道路スタブ)としてデータセットに付加される。完成する道路が経路構成を有するものであるが設定された距離よりも重要度が低い場合は、その完成する道路と接続する道路もまた分析される。
元の経路と、同等又はそれ以上の重要度を有する道路が交わる交差地点は、“重要”であると分類される。他の交差地点(“非重要”交差地点)は支線に対応するのが典型である。
上記の例について、データセットへの伸長アルゴリズムの結果が図5に示されている。
元の経路に対応する要素は“A”とラベルが付され、経路構成は“B”とラベルが付される。“C”とラベルが付いているのは支線である。重要交差地点は黒円で示される。
経路が生成されると、関心地点セレクタは、経路図形に含まれる可能性のある経路沿いの関心地点を識別する。このとき経路は分割される。この分割は、経路指定アプリケーションを通じてユーザから受信する経路更新要求に対応して、概略図ジェネレイタに対して経路の個々の区間の概略図を生成するように一連の指示を与えるものである。
一連の概略図の提供による、経路沿いのユーザに対する経路の設定プロセスの実行中に、経路指定アプリケーションは修正経路指定要求を送信してもよい。例えば、ユーザが経路を辿っているものの、道に迷う場合が考えられる。この場合は、既存の経路は無視され、修正経路指定要求に基づき新たな経路が算出される。
4.関心地点セレクタ
経路が算出されると、目立つビルといった関心地点(POI)は、後にユーザに表示するために経路とともに識別される。このため、ユーザは提案された経路にしたがった道を見つけることができる。関心地点の選択についての様々な方法について以下説明する。
経路が算出されると、目立つビルといった関心地点(POI)は、後にユーザに表示するために経路とともに識別される。このため、ユーザは提案された経路にしたがった道を見つけることができる。関心地点の選択についての様々な方法について以下説明する。
4.1 選択ランキング
交差地点に近い関心地点は、複数の道路のうちどの道路に行くかを決める際に、ユーザが参照するので、極めて重要である。そのような関心地点を識別するために、いくつかのセクタの組が各交差地点の周囲に策定される。これは、図8に例示されている。
交差地点に近い関心地点は、複数の道路のうちどの道路に行くかを決める際に、ユーザが参照するので、極めて重要である。そのような関心地点を識別するために、いくつかのセクタの組が各交差地点の周囲に策定される。これは、図8に例示されている。
道路網の要素である道路20、23及び24を通過する経路を例に述べる。道路網要素23乃至26によって構成されている交差地点は、4つの領域(sector;セクタ)に分割される。その各セクタは、近接する2つの道路による各2辺と、関心地点から所定の距離にある曲線検索領域30乃至33に境界分けされる。各セクタにはセクタランキング(0から1の間の値)が割り当てられ、経路に近いセクタに高ランクを与える。従がって、図8のセクタ30は経路の一部を形成する道路網要素により2辺に境界分けされ、それ故、高いランキングとなる。一方セクタ31と33は、1辺でのみ境界分けされているため、中位のランキングとなり、セクタ32はどの辺でも境界分けされていないために低ランクとなる。
4.2 関心地点ランキング
次に、セクタ30乃至33において、関心地点が検索され、関心地点のランキングが決定される。関心地点の位置が、セクタに含まれるか、セクタを横切っている場合に、関心地点の候補となる。サーバ1は、多くの異なるデータソース50から関心地点を検索してもよい(図2参照)。例えば、データソース50のうちの1つはMasterMapとして知られる、ビルを表現するポリゴン図形のデータを含む、Ordnance Surveyデータセットであってもよい。データソース50はAddressPointとして知られるOrdnance Surveyデータセットでも良く、それは、イギリスにおける全ての郵便物の配送先に関する住所情報と同様に地点図形データを有する。AddressPointの地点データはMasterMap Polygonの中にあり、ビルの住所を指定することに用いることができる。更に他のデータソース50は、E−Streetにより提供されるデータセットでもよい。これは、会社の情報を提供し、座標上の点として表現される。
次に、セクタ30乃至33において、関心地点が検索され、関心地点のランキングが決定される。関心地点の位置が、セクタに含まれるか、セクタを横切っている場合に、関心地点の候補となる。サーバ1は、多くの異なるデータソース50から関心地点を検索してもよい(図2参照)。例えば、データソース50のうちの1つはMasterMapとして知られる、ビルを表現するポリゴン図形のデータを含む、Ordnance Surveyデータセットであってもよい。データソース50はAddressPointとして知られるOrdnance Surveyデータセットでも良く、それは、イギリスにおける全ての郵便物の配送先に関する住所情報と同様に地点図形データを有する。AddressPointの地点データはMasterMap Polygonの中にあり、ビルの住所を指定することに用いることができる。更に他のデータソース50は、E−Streetにより提供されるデータセットでもよい。これは、会社の情報を提供し、座標上の点として表現される。
各関心地点のランキングは、以下のように多くの寄与条件を加算することで算出される。
p1重要度係数+
p2経路係数+
p3ラベル係数+
p4距離係数+
p5セレクタランキング
p1重要度係数+
p2経路係数+
p3ラベル係数+
p4距離係数+
p5セレクタランキング
このような各係数は0から1の値をとり、そのパラメータ(p1、p2、p3、p4、p5)は関心地点の選択アルゴリズムに対する入力として提供される。
重要度係数は、関心地点がどのような種類の場所であるかに基づき、関心地点がどれくらい重要であるかを示す。例えば、映画館を表す関心地点は、家を表す関心地点よりも重要であるとされる。重要度の幅(通常多くとも12)に対する関心地点の種別をマッピングすることは、利用可能なその種別に基づいて定義される。このマッピングは、ユーザプロフィールによって異なるものであってもよい。例えば、パブやバーは、ランキングにおいて、男性の方が女性よりも高くなる。更に、重要度係数は、小さい関心地点よりも大きい関心地点に高くランク付ける仕組みを有する。(これは関心地点がポリゴン図形である場合に利用可能である。)これは、いかに示す関数によって算出される。すなわち、ポリゴンエリアの平方根を入力値とし、その結果を重要度の幅で除する。平方根を用いるのは、この計算が、関心地点がどれだけの道路と接しているかをより正確に見積もるためである。
経路係数は、経路上の地点から関心地点がどれだけ近くにあるのかに基づき、0から1までの数値で表されたものである。関心地点の住所が経路上にあることを示している場合は、関心地点は経路上にあると想定される。そうでなければ、経路から関心地点までの最も近い距離が算出される。これが閾値より低い場合は、関心地点は経路上にあるとみなされる。ラベル係数は、画像において関心地点にラベル付けするのにどれくらいのスペースが必要であるかによって、0から1の間の値を返す。
距離係数は、認識された交差地点又は現在位置が関心地点からどれくらい遠くにあるか基づき、0から1までの数値で表されたものである。これには、以下の関数を利用する。関数に使用される距離とは、関心地点の図形と認識された交差地点又は現在位置の間の最短距離である。
これらの係数の計算には、値xを、0から1の範囲の数値で表現する関数を用いる。これは次の式である
0/(1.0+exp((x−x0)/xk))
0/(1.0+exp((x−x0)/xk))
関心地点ランキングに定数として用いられる典型的な数値は以下のとおりである。しかし、本システムの重要な特徴は、これらの数値を容易に変更することができ、異なる種類のデータ(例えば、外国における場合など)に対してシステムを調整することができる点にあることに留意すべきである。
・p1=3.0
・p2=2.0
・p3=1.0
・p4=1.5
・p5=1.2
・x0=10.0及び重要なエリアに対してxk=10.0
・x0=15.0及び交差地点からの距離に対してxk=15.0
・ラベルの長さが15未満である場合、ラベル係数は0.0、その以外の場合は1.0
・p1=3.0
・p2=2.0
・p3=1.0
・p4=1.5
・p5=1.2
・x0=10.0及び重要なエリアに対してxk=10.0
・x0=15.0及び交差地点からの距離に対してxk=15.0
・ラベルの長さが15未満である場合、ラベル係数は0.0、その以外の場合は1.0
4.2.1 ユーザ情報に基づくランキング
上記の関心地点ランキングスキームは、関心地点セレクタが詳細情報を利用して、ユーザに、よりきめ細かい経路指定情報を提供するものであってもよい。以下例示する。
・指示は、ほぼリアルタイムで生成されるので、関心地点セレクタは、関心地点の選択の際に、現在時刻及びユーザの現在位置に関する情報を利用してもよい。例えば、会社やショッピングセンター、類似する関心地点の開業時間と現在時刻とを比較し、適切な関心地点を決定して表示してもよい。例えば、小売店は、その開業時間中は、関心地点としての選択において高い優先順位がつけられる。
・関心地点セレクタは、ユーザプロフィールに格納されているユーザごとの場所リスト(例えば“マイプレイス”リスト)からの場所、特に頻繁に経路の始点又は終点として用いられた場所、を関心地点として利用してもよい。こうした関心地点は、ラベルを付されて表示されるように高い優先順位が与えられる。
上記の関心地点ランキングスキームは、関心地点セレクタが詳細情報を利用して、ユーザに、よりきめ細かい経路指定情報を提供するものであってもよい。以下例示する。
・指示は、ほぼリアルタイムで生成されるので、関心地点セレクタは、関心地点の選択の際に、現在時刻及びユーザの現在位置に関する情報を利用してもよい。例えば、会社やショッピングセンター、類似する関心地点の開業時間と現在時刻とを比較し、適切な関心地点を決定して表示してもよい。例えば、小売店は、その開業時間中は、関心地点としての選択において高い優先順位がつけられる。
・関心地点セレクタは、ユーザプロフィールに格納されているユーザごとの場所リスト(例えば“マイプレイス”リスト)からの場所、特に頻繁に経路の始点又は終点として用いられた場所、を関心地点として利用してもよい。こうした関心地点は、ラベルを付されて表示されるように高い優先順位が与えられる。
4.2.2 関心地点視認性に基づく関心地点の選択
上述の関心地点ランキングスキームは視認性による関心地点の選択に応用してもよい。関心地点の視認性は、以下のステップにより決定される。
・関心地点は、地理データ(MasterMapにより提供されるものなど)により、ビルと関連付けられ、経路上の道路区間に最も近いビルのエッジが決定される。関心地点の住所が直接に経路上にある場合、つまり、住所が、道路区間の道路名と適合する場合、あるいは部分的に適合する場合は、関心地点は視認可能とみなされる。
・一方、住所が不明か、住所が経路に適合しない場合、関心地点セレクタは、許容範囲内の短い距離内にビルがあるかどうかをチェックし、その範囲内にある場合も又、関心地点は視認可能とみなされる。
上述の関心地点ランキングスキームは視認性による関心地点の選択に応用してもよい。関心地点の視認性は、以下のステップにより決定される。
・関心地点は、地理データ(MasterMapにより提供されるものなど)により、ビルと関連付けられ、経路上の道路区間に最も近いビルのエッジが決定される。関心地点の住所が直接に経路上にある場合、つまり、住所が、道路区間の道路名と適合する場合、あるいは部分的に適合する場合は、関心地点は視認可能とみなされる。
・一方、住所が不明か、住所が経路に適合しない場合、関心地点セレクタは、許容範囲内の短い距離内にビルがあるかどうかをチェックし、その範囲内にある場合も又、関心地点は視認可能とみなされる。
これにより、例えば、実際の住所が経路上にない場合であっても、経路から少しだけ外れた場所にある関心地点又はビルを、関心地点の候補として含めることができる。
・経路からそれほど近くはないが、経路上の住所を有する関心地点又はビルに対して、システムは、一連の景観に関する計算を行ない、当該ビルや他の建物が交差地点から視認可能であるかを決定する。これにより、実際には他のビルに隠されてしまっている関心地点を表示してしまうことを防止する。例えば、関心地点がビル内にある銅像である場合、それは明らかに視認できるものではないので、関心地点の候補とされることはない。
・経路からそれほど近くはないが、経路上の住所を有する関心地点又はビルに対して、システムは、一連の景観に関する計算を行ない、当該ビルや他の建物が交差地点から視認可能であるかを決定する。これにより、実際には他のビルに隠されてしまっている関心地点を表示してしまうことを防止する。例えば、関心地点がビル内にある銅像である場合、それは明らかに視認できるものではないので、関心地点の候補とされることはない。
有名なフランチャイズ・チェーンの各店舗である小売店、映画館あるいは他の事業所は、関心地点の選択に対してより高い優先順位が与えられる。チェーン店の固定リストは、この目的に使用され、該当する店舗名がリストアップされ、その店舗名と探している関心地点の会社名とが比較される。
4.3 関心地点データアクセス
MasterMapのデータソースにおいては、通常、関心地点の図形情報が、店、略図、ポリゴン図で表現される。同一の関心地点に関連するその他の情報は、AddressPointやE−Streetデータセットといった他のデータソースに含まれていてもよい。そうした情報は図形座標と結び付けられるが、ビルの概要とは関連付けられることはない。
MasterMapのデータソースにおいては、通常、関心地点の図形情報が、店、略図、ポリゴン図で表現される。同一の関心地点に関連するその他の情報は、AddressPointやE−Streetデータセットといった他のデータソースに含まれていてもよい。そうした情報は図形座標と結び付けられるが、ビルの概要とは関連付けられることはない。
異なるデータソースからの関心地点は、別々のデータソースからの関心地点情報に統一した形式でアクセスすることで、関心地点コンテンツオブジェクト(POI Content object)としての地物として表示される。
場合によっては、検討中の関心地点が、検索されている地点があるセクタ内で、ポリゴン図形特性のみを有する場合がある。そのような場合は、関心地点図形全体の中で空間検索が行われ、関心地点コンテンツオブジェクトが探しだされる。これらのオブジェクトの特性は、関心地点の補完的特性として利用される。
例えば、(病院のような)大型のビルは、MasterMapデータセットにおいては、大きなポリゴン図形によって表される。このポリゴン図形は、例えばセクタ30から33までの一部と部分的に重なっており、ビルの角だけがセクタの内側にあり、残りの部分はセクタの外側に場合がある。この場合ビルそれ自体は、利用可能なセクタ内の関心地点として認識される。ビル内にある関心地点は、AddressPointやE=Streetデータセットを例にすると、セクタの外側にあるものとされうる。
従って、関心地点セレクタは関心地点コンテンツオブジェクトを求めてビル全体を探索し、それらをビルの補完的特性と扱う。
一般に、関心地点コンテンツオブジェクトそれ自体は、関心地点として扱われるわけではない。関心地点コンテンツオブジェクトは、関心地点(上記の場合ビルの概要図形)と、関心地点の範囲内で離れた場所にあり、関心地点について他の情報を与えるもの、との混乱を避けるためのものである。
実施例によっては、関心地点コンテンツオブジェクトは、関心地点の検索の時には無視され、必要なときは関心地点を経由してそこに至るに過ぎない。しかしながら他の実施例においては、ビル(又は類似のポリゴン図形)を含まない関心地点コンテンツオブジェクトは関心地点として扱われる。
4.3.1 データの合成
本システムは、異なるデータソースからのデータの合成に関する様々な問題に対処する。これらの問題の多くは、データが異なるフォーマットで保持されていること、あるいは、データが、同じ種類の地物(あるいは地物の特性)を識別するために、異なる名前又は識別子データを有するデータソースからのデータであることと関連する。データへアクセスするために使用される全てのコネクタに対して共通のインターフェイスを用いることで解決が図られる。こうしたコネクタの実現は、共通のインターフェイスを通じて異なるデータを送受信することで成される。オブジェクト指向のデータモデルがこのインターフェイスの上位に構築される。
本システムは、異なるデータソースからのデータの合成に関する様々な問題に対処する。これらの問題の多くは、データが異なるフォーマットで保持されていること、あるいは、データが、同じ種類の地物(あるいは地物の特性)を識別するために、異なる名前又は識別子データを有するデータソースからのデータであることと関連する。データへアクセスするために使用される全てのコネクタに対して共通のインターフェイスを用いることで解決が図られる。こうしたコネクタの実現は、共通のインターフェイスを通じて異なるデータを送受信することで成される。オブジェクト指向のデータモデルがこのインターフェイスの上位に構築される。
より具体的に言うと、異なるデータソースからのデータを使用することの問題点の1つは、データの重複の問題である。例えば、E−Streetデータセットは、その座標がMasterMapのポリゴン図形(例えばビル)内にあるビルの名称を含んでいる場合がある。更にAddressPointデータセットもまた同じビルの名称を含んでおり、しかしそのビル内ではあるがわずかに異なる位置にある場合がある。インターフェイスは、2つの異なるソースからのビル名称を関連づけ、両者が同一のビルに関係するものであると認識し、重複が避けられる。
4.4 関心地点の選択
交差地点を識別するために用いられる関心地点の選択のために、適切なセクタのランキングが関心地点ランキングに加えられ、全てのセクタは“使用中”とマーキングされる。関心地点の選択のために、“使用中”のセクタのうち最もランクの高い関心地点が選択される。この関心地点は更なる選択対象から除外され、そのセクタは“未使用”としてマーキングされる。このプロセスは追加される関心地点を選択するために繰り返される。全てのセクタが“未使用”とマークされている場合は、それら全ては再び“使用中”とマークされる。
交差地点を識別するために用いられる関心地点の選択のために、適切なセクタのランキングが関心地点ランキングに加えられ、全てのセクタは“使用中”とマーキングされる。関心地点の選択のために、“使用中”のセクタのうち最もランクの高い関心地点が選択される。この関心地点は更なる選択対象から除外され、そのセクタは“未使用”としてマーキングされる。このプロセスは追加される関心地点を選択するために繰り返される。全てのセクタが“未使用”とマークされている場合は、それら全ては再び“使用中”とマークされる。
4.4.1 仮想交差地点の導入
経路上の“交差地点”よりも、経路の“区間”内にある関心地点を選択する必要がある場合がある。これは通常、区間が閾値の長さよりも長い場合に行われる。1つか又はそれ以上の2方向の仮想交差地点がその区間に導入される。これらの仮想交差地点の位置は、策定される区間が長くなり過ぎないように(つまり、閾値の長さのある割合以内、通常25%以内の長さ)又、支線が多くなりすぎないように(通常4つ以上でないように)選択される。仮想交差地点は、道路網内に存在するノード上に追加することができる場合もあるし、そうでない場合は、エッジの途中に導入される。
経路上の“交差地点”よりも、経路の“区間”内にある関心地点を選択する必要がある場合がある。これは通常、区間が閾値の長さよりも長い場合に行われる。1つか又はそれ以上の2方向の仮想交差地点がその区間に導入される。これらの仮想交差地点の位置は、策定される区間が長くなり過ぎないように(つまり、閾値の長さのある割合以内、通常25%以内の長さ)又、支線が多くなりすぎないように(通常4つ以上でないように)選択される。仮想交差地点は、道路網内に存在するノード上に追加することができる場合もあるし、そうでない場合は、エッジの途中に導入される。
4.4.2 方向図形関心地点の選択
方向図形の場合(上述)、関心地点は交差地点に対して識別され、そのためには、目的地への”方向”に指し示すように上述の関心地点の場所の修正された形式が用いられる。この場合、”経路係数”と”セクタランキング”は常にゼロにセットされる。識別された交差地点間にある通路により境界分けされるポリゴン図形の全体に対してセクタが追加構築される。
方向図形の場合(上述)、関心地点は交差地点に対して識別され、そのためには、目的地への”方向”に指し示すように上述の関心地点の場所の修正された形式が用いられる。この場合、”経路係数”と”セクタランキング”は常にゼロにセットされる。識別された交差地点間にある通路により境界分けされるポリゴン図形の全体に対してセクタが追加構築される。
位置図形・関心地点の選択
位置図形の場合(上述)、関心地点は、その位置の重要度係数を基に、位置図形に対して選択される。関心地点の順位のその他の要素は無視される。概略図のエリアは、少なくとも2つ、できればそれ以上の関心地点を含むように選択される。
位置図形の場合(上述)、関心地点は、その位置の重要度係数を基に、位置図形に対して選択される。関心地点の順位のその他の要素は無視される。概略図のエリアは、少なくとも2つ、できればそれ以上の関心地点を含むように選択される。
5. セグメンタ
概略図は何らかの地理的な概念(例えば、AからBへはどう行くか、あるいはZはどこか)をユーザに伝えるために用いられる。そのためには、通常複数の概略図が必要とされ、そのために経路は、次画面/前画面の操作による一連の概略図として表示される。一般的に言うと、表示される地理的概念は、各概略図が現実の世界で何らかの意味をなすように、例えば、2つの重要交差地点間にある道路区間というように、個別の図形に分割(セグメント化)される。
概略図は何らかの地理的な概念(例えば、AからBへはどう行くか、あるいはZはどこか)をユーザに伝えるために用いられる。そのためには、通常複数の概略図が必要とされ、そのために経路は、次画面/前画面の操作による一連の概略図として表示される。一般的に言うと、表示される地理的概念は、各概略図が現実の世界で何らかの意味をなすように、例えば、2つの重要交差地点間にある道路区間というように、個別の図形に分割(セグメント化)される。
これは、書籍の地図(例えば“A−Z”)といった複数ページに分割される従来からの地図と対照的である。従来の地図においては、示すものが何であるかに関わりなく、そのページは一定のサイズで、一部が重複する。
本発明の経路指定アプリケーションの例においては、一度経路が認識され(更に選択的に経路の地形が簡略化され)、関心地点が選択されると、経路全体が個別に表示可能な部分にセグメント化される。
経路のセグメント化は、それぞれが意味を有し、お互いが容易に関連付けられる部分に経路を分割するため、道路網の現実世界の型式に応じて分割する。
様々なセグメント化の方法が、使用される概略図生成方法に従って提供される。いくつかの概略図生成方法を後述する。
5.1 重要交差地点に基づく経路のセグメント化
第1の方法において、セグメント化は、経路上の重要交差地点を認識することにより行われる。重要交差地点は、多様な重要事象から生じる。例えば、重要事象とは、ある道路から別の道路(道路名によって決定される)への経路変更や、経路がより主要な道路と交差することをいう。これら重要事象は、道路網データにおけるノードにおいて、多くの場合共通に生じる。多くの道路網データのソースは、道路網における道路区間(エッジ)の名前と優先度に関するデータを有する。更に、ソースデータは、道路区間が、交差地点か立体交差の一部であるかどうかに関する情報を含みうる。
従って、“道路Xから道路Yへ左折”と表現される経路にあるノードは重要とされ、一方、“左手の道路Bは通り過ぎて道路Aのまま”は重要ではないであろう。
従って、“道路Xから道路Yへ左折”と表現される経路にあるノードは重要とされ、一方、“左手の道路Bは通り過ぎて道路Aのまま”は重要ではないであろう。
重要交差点は、道路網データにおけるノードによって表現されるか、拡張された交差地点によって表現される。この場合、道路網データにおける一連のエッジによって表現される。拡張された重要交差地点は、重要であると決定された経路上のノードを探しあてることにより認識され、その時、以下の一方か両方を満たす、近接したエッジを有する。
(a)エッジは短く、両方のノードの末端が“重要”であること。
(b)ソースデータにおいて、エッジが“交差地点又は立体交差の一部“であると分類されること。
(a)エッジは短く、両方のノードの末端が“重要”であること。
(b)ソースデータにおいて、エッジが“交差地点又は立体交差の一部“であると分類されること。
5.1.2 経路選択
経路は、最初に、重要交差点間にある一連のセグメントを見つけ出すことによって、“経路セクション”に分割される。経路選択は、(もし、拡張されている場合はそれを境界分けする)重要交差地点の全てを含む。連続した経路セクションは、拡張された重要交差地点において一部重複する。j1、j2、j3の3つの交差地点について考える。交差地点j1とj3は通常のものであり、j2が拡張された交差地点であるとする。この場合、2つのルートセクションが発生する。つまり、“j1からj2の末端まで”と、“j2の先端からj3”までである。これら2つのルートセクションは、双方ともj2の全てを含むため、一部重複することになる。
経路は、最初に、重要交差点間にある一連のセグメントを見つけ出すことによって、“経路セクション”に分割される。経路選択は、(もし、拡張されている場合はそれを境界分けする)重要交差地点の全てを含む。連続した経路セクションは、拡張された重要交差地点において一部重複する。j1、j2、j3の3つの交差地点について考える。交差地点j1とj3は通常のものであり、j2が拡張された交差地点であるとする。この場合、2つのルートセクションが発生する。つまり、“j1からj2の末端まで”と、“j2の先端からj3”までである。これら2つのルートセクションは、双方ともj2の全てを含むため、一部重複することになる。
重要交差点間の通路の複雑さによって、わかりやすくするために更なるセグメント化を必要とする。各セクションは、セクションにおける支線(Spur)(重要でない交差地点)の最大数やセクションの最大幅といった、さらなる基準を満たすため、更に分割される。これは、繰り返し行われる再分割によって行われる。
例えば、図6に示されるように、経路は3つのセクションに分割されてもよい。
5.1.3 ユーザと相互関係
ユーザとの相互関係は更に以下のようにセグメント化に影響を与えうる。デフォルトで、概略図の“区間ビュー”は1つの経路セクションを表示する。画像の大きさは、前及び次の経路セクションとの重複部分と、そのセクションに関連する関心地点とを加えた経路セクションに合わせるように選択される。
ユーザとの相互関係は更に以下のようにセグメント化に影響を与えうる。デフォルトで、概略図の“区間ビュー”は1つの経路セクションを表示する。画像の大きさは、前及び次の経路セクションとの重複部分と、そのセクションに関連する関心地点とを加えた経路セクションに合わせるように選択される。
従って、単一の経路セクションは通常、“区間ビュー”に対応する。しかし、ユーザは、経路を進む過程において相互に区間ビューと交差地点ビューの切り替えを選択できる。
ユーザが交差地点の交差地点ビューと現状の経路セクションとの間を切り替える場合(例えば、第1のセクション内の2本の支線の交差地点ビューから切り替える場合)、ユーザの現在位置から始まる区間ビューを示すように、システムが経路のセクション分けを調整してもよい。これは、ユーザ相互作用が経路のセクション分けにどのように影響を与えるかの一例に過ぎない。
ユーザが交差地点の交差地点ビューと現状の経路セクションとの間を切り替える場合(例えば、第1のセクション内の2本の支線の交差地点ビューから切り替える場合)、ユーザの現在位置から始まる区間ビューを示すように、システムが経路のセクション分けを調整してもよい。これは、ユーザ相互作用が経路のセクション分けにどのように影響を与えるかの一例に過ぎない。
5.1.4 プロセッシング
セクションの生成、図形の簡略化、関心地点選択、経路区間化の各ステップは、経路リクエストを最初に受信した時、経路策定の最初のセッション時にまず処理されることが望ましい。ユーザにより経路に更新の要求された時、各概略図が、即座に生成され、通常は、経路区間のそれぞれに対して(経路区間の数に従がって)繰り返し行われる。
セクションの生成、図形の簡略化、関心地点選択、経路区間化の各ステップは、経路リクエストを最初に受信した時、経路策定の最初のセッション時にまず処理されることが望ましい。ユーザにより経路に更新の要求された時、各概略図が、即座に生成され、通常は、経路区間のそれぞれに対して(経路区間の数に従がって)繰り返し行われる。
5.2 交差地点の簡略化に基づくセグメント化
他のセグメント化の方法においては、簡略化する交差地点図形ジェネレイタ(後述)は経路図形の生成のために用いられる。セグメンタは以下のように動作する。
他のセグメント化の方法においては、簡略化する交差地点図形ジェネレイタ(後述)は経路図形の生成のために用いられる。セグメンタは以下のように動作する。
セグメンタは、経路上の最初のノードを選択し、簡略化する交差地点図形ジェネレイタへ、起点ノード(seed node)として送信する。この起点ノードから、簡略化する交差地点図形ジェネレイタは、単一の概略図において拡張された交差地点として表示されるべき1又は複数のノードのセットを識別する。
概略図に表示された拡張された交差地点は、経路における複数のノードを含むことがある。それ故、概略図ジェネレイタが最初の概略図を生成すると、セグメンタは経路に沿って、いまだ概略図に含まれていない次のノードを見つけるための検索を行なう。このノードは、再び概略図生成モジュールに送信され、以降の概略図生成の開始地点となる。こうして経路の異なる概略図へのセグメント化は、拡張された交差地点を概略図ジェネレイタが識別することの副産物として、自動的に行われる。
セグメンタは、概略図を生成しようとする特定の重要交差地点のみを、選択的に識別してもよい。その一方で他の交差地点は重要でないとみなされ、無視される。
以下で述べるが、後述のノードイメージ図形ジェネレイタの場合は、より簡略化された方法が用いられる。
6. 概略図ジェネレイタ
本実施例において、本システムは、様々な種類の概略図の生成方法を可能とする、いくつかの代替可能な概略図生成モジュールを有する。最適な概略図生成モジュールは、経路指定要求の内容に従がって選択される。例えば、画像の解像度といった移動端末の特性に従って、移動端末の種類ごとに、異なる種類の概略図が生成される。又、その選択は、システムの構成、又は、ユーザの設定変更に依存するものである。更に、個別の経路概略図の生成の代わりに、あるいはそれに加えて、経路指定アプリケーションが、経路全体を表示する概略図の生成を要求してもよい。
本実施例において、本システムは、様々な種類の概略図の生成方法を可能とする、いくつかの代替可能な概略図生成モジュールを有する。最適な概略図生成モジュールは、経路指定要求の内容に従がって選択される。例えば、画像の解像度といった移動端末の特性に従って、移動端末の種類ごとに、異なる種類の概略図が生成される。又、その選択は、システムの構成、又は、ユーザの設定変更に依存するものである。更に、個別の経路概略図の生成の代わりに、あるいはそれに加えて、経路指定アプリケーションが、経路全体を表示する概略図の生成を要求してもよい。
実施の形態においては、後述のいくつかの、又は全ての概略図ジェネレイタを組み込んだものであってもよいし、あるいは、それらのジェネレイタの特質のいくつか、又は全てを有し、様々な概略図生成方法を実行する他の概略図ジェネレイタを、適切な組み合わせで取り込んだものであってもよい。更に、単一の設定変更可能な概略図生成モジュールによって、様々な概略図生成方法が実行されるものであってもよい。
以下の概略図ジェネレイタを例として述べる。
・通路概略図ジェネレイタ
・ノードイメージャ
・簡略化交差地点図形ジェネレイタ
・通路概略図ジェネレイタ
・ノードイメージャ
・簡略化交差地点図形ジェネレイタ
各概略図ジェネレイタは、関心地点配置・ラベリングモジュールを有する。ラベリングモジュールは、概略図上で、関心地点セレクタによって選択された関心地点を位置づけ、概略図の地物にラベルを付す。同様の技術はその他の種類のジェネレイタにも用いられている。これらの技術は、以下のそれぞれの概略図ジェネレイタの記述において説明される。
6.1 通路概略図ジェネレイタ
通路概略図ジェネレイタは、通常大型の移動端末での使用における概略図生成に用いられる。これらの概略図は、経路全体の概要図であるか、複数の交差地点をカバーする経路の区間を示す区間ビューであってもよい。
通路概略図ジェネレイタは、通常大型の移動端末での使用における概略図生成に用いられる。これらの概略図は、経路全体の概要図であるか、複数の交差地点をカバーする経路の区間を示す区間ビューであってもよい。
又、より小型の移動端末においても、特定の交差地点のビューを表示するために用いられる。
経路指定サブシステムにおける通路概略図ジェネレイタ540の動作について図18bを参照して以下説明する。
前述したように生成された道路網における経路構成は、通路抽出モジュール542により概略図として簡略化される。本モジュールの動作を図7及び図8を参照して説明する。
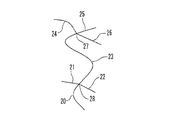
道路網要素は、最初に通路のセットに圧縮される。そのセットにおける各々の通路は、同じ道路名を共有し、経路を結ぶエッジを集めたもので、各通路は、単純なひも状のエッジを形成する。例えば図7に示すように、第1の通路が要素20、23及び25を、第2の通路が要素21、22を、そして第3の通路が要素24、26を構成することになる。
通路のそれぞれは個別に簡略化される。この処理では微細な点を除去するか、そうでなければ、通路の2次元のポリゴン表示を工夫して処理される。
例えば、直線方向にある一定許容範囲内の道路セクションは、直線とされる。
距離についての許容範囲は以下のように考慮に入れられる。通路は当初、ソースデータにより特定される座標のセットを有するポリゴン図形により定義される。このポリゴン図形は、座標を除去することで簡略化が行われる。しかしその一方で、簡略化されたポリゴン図形は元のポリゴン図形から距離誤差“d”の範囲内にあるという制約は維持する。
例えば、方向図又は位置図の場合、“d”の値は、方向図によってカバーされるエリアのサイズに基づき選択される。例えば、カバーされるエリアの最大幅の10分の1のサイズとして選択される。経路図の場合、距離“d”は、経路全体のサイズに基づくものである。例えば、“d”は経路全体の10分の1のサイズであってよい。別の例として、dの値は個々の通路のサイズを反映して変化してもよい。更に発展させると、対応する地点において、元のポリゴン図の方向と比較して、簡略化されたポリゴン図形の方向の誤差が抑制されても良い。これは、重要交差地点に適用される制限に似ているが、それより緩い角度にで抑制される。
角度についての許容範囲の取り扱いの度合いは、(上記で定義した)“重要交差地点”と同じものである。なぜならば、交差地点における道路間の相対的な角度のズレは、ユーザの経路に対する信頼に影響を与えるからである。
図7のデータ簡略化の例が図8に示される。最初の通路は、ページの上下を直線で配置される。要素24も直線化される。ノード27における要素23と24間の角度のズレが補正される。ある通路が閾値の長さを超える場合、その通路の中間地点に仮想交差地点が導入される。通路抽出モジュール542により生成された簡略通路は、通路描画モジュール544(図18b参照)への入力として用いられる。この通路描画モジュール544は、通路を画面の適当な位置に描き、関心地点や矢印といった他の付加要素を配置する。この動作を以下に説明する。
地形は以下のとおり配置される;
・画面上の地物の配置構成は、画面の縦横比を最大限に利用するように配置される。
・行き先が既に選択されていて、ユーザを案内する最初のステップとして方向図が用いられている場合、方向図は、ユーザの現在の進行方向が画面の上方(又は、画面の形式によっては左から右)を指し示すように配置される。
・方向図が、単にユーザの場所を認識するために用いられている場合、方向図は従来どおりの方向を示す(つまり、上方が北を示す)か、その代わり、ある重要な対象(例えば方向図中の最も重要な道路)が画面の上下又は左右を占めるように配置する。
・水平線又は垂直線を整列し、多くの情報を最も狭い領域にはめ込む。
・画面上の地物の配置構成は、画面の縦横比を最大限に利用するように配置される。
・行き先が既に選択されていて、ユーザを案内する最初のステップとして方向図が用いられている場合、方向図は、ユーザの現在の進行方向が画面の上方(又は、画面の形式によっては左から右)を指し示すように配置される。
・方向図が、単にユーザの場所を認識するために用いられている場合、方向図は従来どおりの方向を示す(つまり、上方が北を示す)か、その代わり、ある重要な対象(例えば方向図中の最も重要な道路)が画面の上下又は左右を占めるように配置する。
・水平線又は垂直線を整列し、多くの情報を最も狭い領域にはめ込む。
(移動端末から受信した経路更新要求に対応して生成される)経路図のそれぞれは、既に生成され、概略図として簡略化された経路のセグメントに基づくものであり、関心地点の数は関心地点セレクタにより、当該経路と関連付けられている。
この“セグメント”は、1又はそれ以上のノードを含む。いずれかの経路図に実際に表示される関心地点の選択は、いかに述べるように、更に詳細化され、画像の見易さを向上させるための様々な技術が採用される。それは以下のとおりである。
・必要に応じて、関心地点は、区別しやすいように効果的に道路から分離される。
・関心地点や(矢印などの)他のアイコンや支線を、通路の上方や下方に移動して、伝達されるべき重要な情報失うことなく、見易さを向上させる。
・アルゴリズムは、道路の分類や、そのサイズ、あるいは、それが側道であるか、十字路であるかなどといったことを観察する。道路の重要度に応じて、スタブ(Stub)を表示するか、より図式化して表示する。
・混交することなく全ての表示アイテムを表示することができない場合、ユーザとの距離の近さ及び、表示アイテムが当初構成される際に計算された統計値(上述の関心地点ランキングを参照)を考慮に入れた関連性の評価に従がって、表示アイテムが除去される。
・通路の長さ、関連する角度、あるいは通路セグメントであっても、表示される画像の見やすさを最適化するために更に調整されてもよい。
・図を参照することでユーザが自己の位置を正しく認識することを補助するため、最初の経路図により詳細なものが含まれていてもよい。
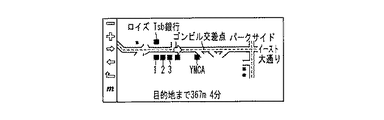
このようにして生成される各概略図を、図9、10、11、12に例示する。
・必要に応じて、関心地点は、区別しやすいように効果的に道路から分離される。
・関心地点や(矢印などの)他のアイコンや支線を、通路の上方や下方に移動して、伝達されるべき重要な情報失うことなく、見易さを向上させる。
・アルゴリズムは、道路の分類や、そのサイズ、あるいは、それが側道であるか、十字路であるかなどといったことを観察する。道路の重要度に応じて、スタブ(Stub)を表示するか、より図式化して表示する。
・混交することなく全ての表示アイテムを表示することができない場合、ユーザとの距離の近さ及び、表示アイテムが当初構成される際に計算された統計値(上述の関心地点ランキングを参照)を考慮に入れた関連性の評価に従がって、表示アイテムが除去される。
・通路の長さ、関連する角度、あるいは通路セグメントであっても、表示される画像の見やすさを最適化するために更に調整されてもよい。
・図を参照することでユーザが自己の位置を正しく認識することを補助するため、最初の経路図により詳細なものが含まれていてもよい。
このようにして生成される各概略図を、図9、10、11、12に例示する。
6.3 ノードイメージャ
ノードイメージャ560の動作を図18を参照し、以下説明する。
ノードイメージャ560の動作を図18を参照し、以下説明する。
ノードイメージャ表示は、交差地点ごとの経路の“俯瞰図”を提供するために用いられる。実施例によっては、ノードイメージャ560は、重要交差地点のみの図を提供し(図13参照)、他の全ての交差地点図は省略される(図14参照)。交差地点間の経路の区間の表示は小型の端末にとって、実利的ではなく、交差地点ごとの経路の表示が、より小型の端末に適している。ノードイメージャによる表示は、(前述及び後述するタイプの)図とは異なり、交差地点をより詳細に表示し、交差地点の図形の変更(つまり簡略化)を行なわない。この詳細な表示により、ユーザは自分が正しい交差地点を進んでいることを確認できる。
前述した経路セグメンタにより算出された重要交差地点のセットは、ノードイメージャ560に入力される。
各々の交差地点について表示されるエリアは、以下に説明する画像境界算出モジュール562によって計算される。
・(縦長の端末に対しては)ユーザの位置が下端から開始し、又は(横長の端末に対しては)左端から開始するように地図を回転させる。
・この回転されたスペース内で、最小境界長方形(MBR)は、交差地点に至るまでの特定距離から、交差地点の内側、交差地点後の特定距離経路までの経路の一部によって決定される。
・MBRは、交差地点の検索半径内にある選択された関心地点の一部を含むように拡張される(こうしてビルの外形の一部のみが表される)。
・最終的な画像のスケールと中心部は、MBR全体が示されるように画像が表示できるスケールを最大化するように選択される。
・(縦長の端末に対しては)ユーザの位置が下端から開始し、又は(横長の端末に対しては)左端から開始するように地図を回転させる。
・この回転されたスペース内で、最小境界長方形(MBR)は、交差地点に至るまでの特定距離から、交差地点の内側、交差地点後の特定距離経路までの経路の一部によって決定される。
・MBRは、交差地点の検索半径内にある選択された関心地点の一部を含むように拡張される(こうしてビルの外形の一部のみが表される)。
・最終的な画像のスケールと中心部は、MBR全体が示されるように画像が表示できるスケールを最大化するように選択される。
画像は、交差地点ごとに画像描画モジュール564によって、すぐに生成される。それらの画像は、交差地点における手がかりとなる地物、具体的には道路やビルに関連するポリゴン図形を描くことにより生成される。これらのポリゴン図形により必要とする詳細な情報が示される。関心地点を表す地物は、ハイライト表示され、ラベルが付される。画像のラベルは、以下で述べる最終段階にて同じ動作で行われる。経路は、交差地点に至る前は経路セクション上で内向の矢印で表現され、交差地点経過後は経路セクション上の外向き矢印により表現される。こうして、これらの矢印は、それ自身は交差地点の一部ではないエッジと明らかに関連付けられる。この手法は、交差地点をどのように通過すればよいかをユーザに指示するものではなく、むしろ、ユーザが”路上にいる”という視覚的な制約を付加するものである。
ノードイメージャにより生成された図形が図13と図14に例示される。
6.4 簡略化交差地点図形ジェネレイタ
簡略化図形ジェネレイタの目的は、小型の端末のディスプレイに適した、簡略され、抽象化された描写を生成することであるが、その描写においては、ユーザや観察する者が見る現実世界の代わりになるように、有用な情報は保持される。
簡略化図形ジェネレイタの目的は、小型の端末のディスプレイに適した、簡略され、抽象化された描写を生成することであるが、その描写においては、ユーザや観察する者が見る現実世界の代わりになるように、有用な情報は保持される。
概略図に基づく経路の案内アプリケーションの有用性に影響を与える個々の要素は、複雑な交差地点に関するものである。立体交差や、中央分離帯のある幹線道路、安全地帯といった境界のはっきりした人工物が含まれる場合や、道路の数や図形が狭い区画に集まるため、道路網を、歩行者が単一の交差地点であるとみなし、単一の独立したノードであると判断することが難しい場合に、道路交差地点は複雑なものであるとみなされる。
例として、複雑な交差地点は、図15例示され、“MasterMap”形式のOrdinance Surveyによる複雑な交差地点を含む地図セクションを示している。
その地図は、エリア内に存在するビルと同様であるが、複雑な交差地点を形作る道路網の現実の地形を表示し、それはシルエットで示される。図の中央には三角形の安全地帯が示されている。全体として、この地図は、現実を地理をリアルに表現したものとなっている。
歩行者は、図15の道路網のような複雑な道路網を、様々なかたちで認識する。それは、歩行者がどのようにその交差地点に近づくか、歩行者がどこにいるか、徒歩で安全地帯を横断できるか、あるいはより個人的な好みにしたがったものである。図16A、16B、16Cは、地図を手書きする場合、複雑な交差地点が一般的にどのように描かれるかを示したものである。もちろん交差地点の簡易な描き方として、他のたくさんの方法でも可能である。
地形データ提供装置(geographical data suppllier)により提供される道路網データは、通常、道路の利用者が、どのように交差地点を認知し、案内するかということを指向したものである。
図17は図15、図16と同一の複雑な交差地点について、TeleAtrasが提供するデータである。データサプライヤーによっては、道路網における更なる情報を、道路上の他の特性フラグの形式で提供する。この個別の事例では、目立って表示される道路の要素は“中央分離帯のある幹線道路”としてフラグ付けされる。目立たずに表示される道路の要素は“交差地点の一部”としてフラグ付けされる。道路網内のノードはAからGでラベル付けされる。ノードGは、TeleAtrasによってデータ内にあえて挿入されるものであり、ノードBに対し中央分離帯をはさんだ反対側の地点を意味する。
この道路網を通行する歩行者の経路に対して交差地点の概略図を生成する単純なアプローチでは、各ノードを1つの交差地点として扱う。例えば、ノードCから入り、ノードFに到達する経路に対して、ノードC、G、E、Fのそれぞれが順次、分離して交差地点として表示される。このことは、ユーザが混乱する原因となる。なぜなら、経路はCにおいて分岐し、Gではまっすぐに続き、Eで他の道路と結合し、Fにおいて再び分岐するというように表示されるからである。
簡略化されてはいるものの、利用可能なデータから現実の道路を忠実に再現する概略図の生成には、以下のステップを行なう。
・歩行者によって認識されるような個々の交差地点を決定するため道路網の一部を識別する。こうした交差地点は、道路網の要素のセットに対応し、“拡張交差地点”と呼ぶ。
・各拡張交差地点の簡略化した表示を生成する。
・道路の背景情報とともに簡略化された拡張交差地点の概略図を生成する。
・歩行者によって認識されるような個々の交差地点を決定するため道路網の一部を識別する。こうした交差地点は、道路網の要素のセットに対応し、“拡張交差地点”と呼ぶ。
・各拡張交差地点の簡略化した表示を生成する。
・道路の背景情報とともに簡略化された拡張交差地点の概略図を生成する。
簡略化交差地点図形ジェネレイタは、交差地点の簡略化され抽象化された表現を生成するために、上記のステップを実行する。経路指定サブシステムとの関連におけるその動作について、図18aを参照して以下説明する。
経路指定アプリケーション100は、経路指定サブシステム200、具体的にはルータ210に経路指定要求を送信する。ルータ210は要求された経路を上述のように識別する。その経路はセグメンタ230に送信される。セグメンタ230は、簡略化交差地点図形ジェネレイタ240に対して、(表示される各経路区間についての)連続的な起点ノードを送信する。
簡略化交差地点図形ジェネレイタ240は受信した起点ノードに基づき図画を生成し、出力260へ出力する。
簡略化交差地点図形ジェネレイタ240は、拡張交差地点識別モジュール242、交差地点簡略化モジュール244、交差地点描画モジュール246及び関心地点配置・図形ラベリングモジュール248から構成される。
拡張交差地点識別モジュール242は、経路セグメンタ230から送信された起点ノードに基づき拡張交差地点を識別する。これは、道路網要素が、その要素を交差地点の一部に属すると識別するたくさんの交差地点基準のうちの1つと適合する場合、道路網要素を拡張交差地点を形成する網要素のセットに加えて、ノードから外観を形作ることで達成される。場合によっては、交差地点基準を満たす網要素がない時がある。この場合、識別される拡張交差地点は、単一のノード、つまり起点ノードにのみ適合する。拡張交差地点識別モジュール242について以下において詳細に説明する。
交差地点簡略化モジュール244は、拡張交差地点識別モジュール242が識別した拡張交差地点の抽象表現を作成する。この抽象化交差地点は、拡張交差地点を道路網上の地点として、交差地点の複数の出口とともに表現される。これらの交差地点出口は、道路要素に対応する。当該道路要素は拡張交差地点のノードで近接するが、拡張交差地点それ自身の一部ではない。抽象化された交差地点は、現実の角度を概略図表示として、より適切な角度に変化させつつ、地形的な簡略化も行われる。
しかしながら、全ての拡張交差地点が1つの点に減らすことができるわけではない。概略図を見る者が誤認するおそれがあるからである。例えば、拡張交差地点からの出口が、並行してはいるが位置が離れているもの(スタガ型出口)について、これらの単一の点から出る出口を示す場合、略図として混乱する。そのような場合において、拡張交差地点は単純に、単一の点としては示されず、もっと複雑な表現が必要となる。
簡略化し、抽象化された交差地点の表現の生成について以下説明する。
交差地点が簡略化されると、交差地点描画モジュール246は、簡略化された交差地点の画像表現を作成する。
交差地点が簡略化されると、交差地点描画モジュール246は、簡略化された交差地点の画像表現を作成する。
関心地点配置・図形ラベリングモジュール248は、関心地点のような背景情報を加え、簡略化された交差地点の図形表現にラベルを付し、完全な概略図を作り出す。
6.4.1 拡張交差地点識別モジュール
拡張交差地点識別モジュール242を以下説明する。
拡張交差地点識別モジュール242を以下説明する。
拡張交差地点は、1つ又は複数のノードと、ノードが複数の場合、それらのノードをつなぐノード間のエッジのセット、場合によっては、拡張交差地点につながり、又はそこから出て行く外側のエッジのセットから構成される。
図17の道路網データからの分離した拡張交差地点の概略図が図21に示されている。
拡張交差地点の概略図は、交差地点ノードのセット、その中間のエッジのセット、及び外側エッジのセットで構成される道路網要素のセットとして表現される。
拡張交差地点の概略図は、交差地点ノードのセット、その中間のエッジのセット、及び外側エッジのセットで構成される道路網要素のセットとして表現される。
新たなエッジを、それ以上追加できなくなるまで、交差地点基準に適合する拡張交差地点に追加し、交差地点エッジの道路網を起点ノードから外側に延長することで、拡張交差地点は分離される。
多くの場合、結果としての道路網は、拡張交差地点の退廃したもの、あるいは瑣末なもの、すなわち、単一のノードとなる。しかしながら、場合によっては、道路網は拡張交差地点の1組のノードと、その間のエッジのセットを構成する。めったにないが、単一のノードと単一のエッジを含むこともあり得る。通常は、瑣末ではない例においては、2又はそれ以上のノードと1又はそれ以上のエッジを構成する。
まず、起点ノードから述べると、接続するエッジは全て、未調査のエッジのセットに追加される。そして、そのセットのうち未調査のエッジのそれぞれは、順次、交差地点基準のセットうちのいずれか1つに適合するかどうか調べられる。エッジは、その基準の1つに適合する場合は、拡張交差地点の一部であるとみなされる。そして、そのエッジは未調査のエッジのセットから除外され、拡張交差地点のエッジのセットに追加される。これらノード間の交差地点エッジは拡張交差地点の一部のエッジである。こうして見つけられる交差地点エッジの他の終端のエッジは、未調査のノードセットに追加され、更に検討される。
検討されたエッジが基準に適合しない場合は、外側エッジとみなされる。つまり、それは拡張交差地点に進入又はそこから退出する道路区間に対応することになる。
このように、起点ノードに接続するエッジのすべてが、検討されると、次の未調査ノードについての処理が続けられ、その接続しているエッジは拡張交差地点に含まれているとみなされる。アルゴリズムは未調査ノードのセットが何もない場合停止する。つまり、拡張交差地点に更にエッジが追加されることはない。この処理を通して、交差地点基準を満たさないエッジは、拡張交差地点の一部を構成しないものとみなされ、それ故、外側のエッジであるとみなされる。
アルゴリズムは以下のコードに従がって要約される。
・UnexploredNodesは、拡張交差地点に含まれるかどうかが検討されるノードのワーキングセットである。
・JunctionNodesは拡張交差地点の一部を形成するノードのセットである。
P66
・JunctionEdgesは拡張交差地点の(中間)部分を形成するエッジのセットである。
・MeetsJunctionCriteria (e)は、ブール関数で。エッジeに交差地点基準を当てはめ、基準に適合する場合はtrueで返し、適合しない場合はfalseで返す。
UnexploredNodes : = {SeedNode}
JunctionNodes: = {} ; JunctionEdges : = {} ; ExternalEdges : = {}
While UnexploredNodes is not empty {
Remove next node n from UnexploredNodes
Add n to JunctionNodes
For each edge e adjacent to n not already in JunctionEdges {
If MeetsJunctionCriteria (e) then
add e to JunctionEdges
add node at other end of e to UnexploredNodes
else
add e to ExternalEdges
end if
}
}
・UnexploredNodesは、拡張交差地点に含まれるかどうかが検討されるノードのワーキングセットである。
・JunctionNodesは拡張交差地点の一部を形成するノードのセットである。
P66
・JunctionEdgesは拡張交差地点の(中間)部分を形成するエッジのセットである。
・MeetsJunctionCriteria (e)は、ブール関数で。エッジeに交差地点基準を当てはめ、基準に適合する場合はtrueで返し、適合しない場合はfalseで返す。
UnexploredNodes : = {SeedNode}
JunctionNodes: = {} ; JunctionEdges : = {} ; ExternalEdges : = {}
While UnexploredNodes is not empty {
Remove next node n from UnexploredNodes
Add n to JunctionNodes
For each edge e adjacent to n not already in JunctionEdges {
If MeetsJunctionCriteria (e) then
add e to JunctionEdges
add node at other end of e to UnexploredNodes
else
add e to ExternalEdges
end if
}
}
交差地点基準
道路網上のエッジを交差地点の一部として扱うか否かの決定に用いられる基準を以下説明する。
道路網上のエッジを交差地点の一部として扱うか否かの決定に用いられる基準を以下説明する。
基準(1);ソースデータにセットされたフラグ。ソースデータは、ある道路要素が交差地点の一部であるかどうかを示す複数のフラグを有する。図17の例では、要素AからEは、Teleatlasによって、交差地点の一部としてフラグ付けされる。立体交差の一部としてフラグ付けされる道路要素もこの基準を満たす。
基準(2);道路網要素の長さ。もし道路要素の長さが、ある閾値(例えば20メートル)より短い場合、その道路要素は交差地点の一部であるとみなされる。実施例によっては、道路要素のサイズ又は幅といった道路の分類により、異なる閾値が用いられる。
図17の例では、要素EからFがこの基準を充足する。
基準(3);道路網要素の2元性。道路網要素が、他の要素に対し中央分離帯のある道路の反対側であるとして、ソースデータにフラグ付けされており、前記他の要素が既に拡張交差地点に属すると認識されていた場合、その道路網要素もまた拡張交差地点に追加される。図17の例では、要素AB間が拡張交差地点に追加された場合、その対であるEG間もまた追加される。この対となる2元性はソースデータから派生する。
基準(4)安全地帯の要素;安全地帯を囲む道路要素は、拡張交差地点の一部であるとみなされる。安全地帯に近接しているか、又は、その一部であることの特性が、道路網ソースデータにフラグ付けされていない場合(例えばTeleatlasの場合)、道路網要素のセットが、利用可能な道路網データから、安全地帯の一部を形成することがありうるであろうと、アルゴリズム的に識別することが可能である。
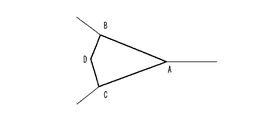
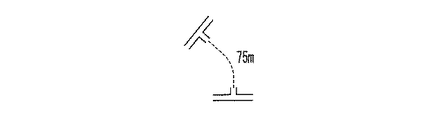
安全地帯は、道路要素が特定の形に一致している時に検知される。
この形は、図19に示されている。特に、安全地帯が検知されるのは、以下の場合である。すなわち、道路網要素のセットが、ノード(A)から発する2辺(AB、AC)を構成し、2つのエッジにより接続するにすぎない(BD、DC又は単にBC)場合、更に、以下の条件を満たす場合である。
・ノードAにおける全ての道路が、同じ名前(又は無名)であること。この条件を満たす限り、図19に描かれているより多くのエッジがAにあってもよい。
・BとCは多くても2つの道路要素により接続されること。つまり、ノードDは存在してもしなくてもよい。2つの道路要素がある場合、それらは必ず同じ名前を有する。このルールにはいくつかの許容されるべき以下の例外がある。
*同一の中央分離帯道路の2つの組の要素とBCが近接する場合は
BCは接続している必要はない。これは、安全地帯で2つに分岐する道路の場合に対応する。
*BDとDCが立体交差又は交差地点としてフラグ付けされている場合、それらは同じ名前を有する必要はない。
*BD及びDCのうち、いずれか一方が非常に短い(3m以下)場合、それらは同じ名前を有する必要はない。
・AC及びABが所定の長さ(例えば75m)よりも短いこと。
・ABCDにより定義される区域の内側に(MasterMapの)ビルが存在しないこと。
この最後のルールは検証のためのチェックとして適用される。
・ノードAにおける全ての道路が、同じ名前(又は無名)であること。この条件を満たす限り、図19に描かれているより多くのエッジがAにあってもよい。
・BとCは多くても2つの道路要素により接続されること。つまり、ノードDは存在してもしなくてもよい。2つの道路要素がある場合、それらは必ず同じ名前を有する。このルールにはいくつかの許容されるべき以下の例外がある。
*同一の中央分離帯道路の2つの組の要素とBCが近接する場合は
BCは接続している必要はない。これは、安全地帯で2つに分岐する道路の場合に対応する。
*BDとDCが立体交差又は交差地点としてフラグ付けされている場合、それらは同じ名前を有する必要はない。
*BD及びDCのうち、いずれか一方が非常に短い(3m以下)場合、それらは同じ名前を有する必要はない。
・AC及びABが所定の長さ(例えば75m)よりも短いこと。
・ABCDにより定義される区域の内側に(MasterMapの)ビルが存在しないこと。
この最後のルールは検証のためのチェックとして適用される。
道路網がこれらの条件を満たす場合、安全地帯が構成されているとみなされる。明確な要素であるAB、BD、DC及びACの全ては、同一の拡張交差地点の一部であるとみなされる。
ここで、あるエッジが、上記特性を有する安全地帯の一部であるかどうかを識別するために適したアルゴリズムを説明する。
安全地帯の一部であるとみなされるためには、当該エッジは上述のパターンに適合する道路網構成の一部でなければならない。それ故、エッジそれ自体は必ず、エッジAB、BD、DC及びACのうちの1つと対応するか、あるいは、単純な配置の場合は、エッジBCに対応する。
更に、上述の要求は、問題となるエッジがABかACのタイプのエッジか、それに近接するエッジである必要がある。実際、対称なパターンであるので、ABタイプのエッジは、ACタイプのエッジと、上記要求という点において同等であり、BDタイプとDCタイプも均等である。従がって、問題となるエッジが、ABタイプのエッジか、ABタイプのエッジに近接するエッジであるかどうかのみを検討すればよい。それ故、当該エッジが、安全地帯の一部であるかどうかの問題は、当該エッジ又はそのエッジに近接する別のエッジが、エッジの安全地帯パターン内のABタイプエッジであるか、そして近接するエッジがABタイプのエッジであるかどうか、及び問題のエッジがそのパターンの一部であるかどうか、によって解決する。
これを達成するために、方向付けされたエッジのセットは、最初に以下を含んで構成される。
a)当該エッジそれ自身が両方向の向きを有するもの(例えはXYとYX)
b)両方向の向きで、当該エッジに近接する全てのエッジ
a)当該エッジそれ自身が両方向の向きを有するもの(例えはXYとYX)
b)両方向の向きで、当該エッジに近接する全てのエッジ
そして、選択されたエッジの各々は、ABタイプのエッジであるか判断される。
これは、そのエッジがABタイプのエッジであるとの推測のもと、パターンに対応するエッジの周囲の道路網を構築しようとすることによって行われる。そのような道路網の構築ができない場合は、そのエッジはABタイプのエッジではない。そのような道路網の構築が可能である場合は、上記のとおり定義づけられた意味において、構築される道路網は安全地帯を表現する。その安全地帯が、当該エッジを含む場合、処理は中断し、そのエッジが実際に安全地帯の一部であることが判明し、基準(4)に適合することとなる。もしそうでなければ、検証は残りの方向付けられたエッジにたいして続けられる。
これは、そのエッジがABタイプのエッジであるとの推測のもと、パターンに対応するエッジの周囲の道路網を構築しようとすることによって行われる。そのような道路網の構築ができない場合は、そのエッジはABタイプのエッジではない。そのような道路網の構築が可能である場合は、上記のとおり定義づけられた意味において、構築される道路網は安全地帯を表現する。その安全地帯が、当該エッジを含む場合、処理は中断し、そのエッジが実際に安全地帯の一部であることが判明し、基準(4)に適合することとなる。もしそうでなければ、検証は残りの方向付けられたエッジにたいして続けられる。
このアルゴリズムは、以下の仮コードによって表現される。
FUNCTION Is_ Part_Of_TrafficIsland (Edge) RETURNS boolean
Generate set of Edge + all adjacent edges XY
For each Directed Edge_in both directions XY and YX
TrafficIsland:= Identify_TrafficIsland (Directed Edge)
If TrafficIsland contains Edge THEN
exit function returning”true”
End if
End for each
No traffic island has been found which contains the edge, so exit function returning”false”
END FUNCTION
FUNCTION Is_ Part_Of_TrafficIsland (Edge) RETURNS boolean
Generate set of Edge + all adjacent edges XY
For each Directed Edge_in both directions XY and YX
TrafficIsland:= Identify_TrafficIsland (Directed Edge)
If TrafficIsland contains Edge THEN
exit function returning”true”
End if
End for each
No traffic island has been found which contains the edge, so exit function returning”false”
END FUNCTION
FUNCTIONIdentify_TrafficIsland (Directed Edge AB) RETURNS set of edges
If AB longer than threshold
it is not part of a traffic island−exit function returning an empty set of edges (meaning that no traffic island has been identified).
Otherwise, identify each further edge AX leaving A having a different road name to AB. If there is one, exit,
Otherwise, for each edge AX, check the following:
Is AX shorter than the threshold length? If no, exit.
Is there a path of length 1 (XB) or length 2(XY, YB) from X to B? If
no:
Are AB and AX flagged as being two sides of the same dual
carriage way? If no, exit.
a potential traffic island has been found consisting of AB, AX and either XB
or XY, YB.
Check if line from midpoint (AB) to midpoint (AX) intersects building in
Master Map data. If no, return traffic island.
END FUNCTION
If AB longer than threshold
it is not part of a traffic island−exit function returning an empty set of edges (meaning that no traffic island has been identified).
Otherwise, identify each further edge AX leaving A having a different road name to AB. If there is one, exit,
Otherwise, for each edge AX, check the following:
Is AX shorter than the threshold length? If no, exit.
Is there a path of length 1 (XB) or length 2(XY, YB) from X to B? If
no:
Are AB and AX flagged as being two sides of the same dual
carriage way? If no, exit.
a potential traffic island has been found consisting of AB, AX and either XB
or XY, YB.
Check if line from midpoint (AB) to midpoint (AX) intersects building in
Master Map data. If no, return traffic island.
END FUNCTION
拡張交差地点基準がどのように適用されるかを描いた図17に示す道路網を検討する。
ノードFから開始すると、拡張交差地点の一部となる近接した要素はEFのみであり、その長さは基準(2)に基づく。ここでノードEが分析される。要素EAは、データ中にフラグづけされ、基準(1)にしたがった同じ交差地点の一部としてデータ中にフラグ付けされる。EGとABの間には、実際には安全地帯が存在するが、それらは安全地帯の一部であるとは認識されない(それ故交差地点の一部であるとも認識されない)。これはノードB及びGによってもたらされる極端な複雑さに起因するものである。
従って、拡張交差地点はF、E及びA、ならびに道路要素EF、EAを構成する。これらのノードに集まる他の全ての道路は、拡張交差地点の外側にあるとみなされる。
7.4.2 交差地点簡略化モジュール
交差地点簡略化モジュール244を以下説明する。
交差地点簡略化モジュール244を以下説明する。
拡張交差地点識別モジュールにより識別された拡張交差地点は、生成する図形の道路網コンテンツを定義づける。拡張交差地点の簡略化されて抽象化された表現は、交差地点簡略化モジュールによって生成され、交差地点概略図に含まれる。
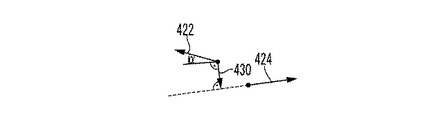
図17の例においては、拡張交差地点FEAは4つの出口を有する。1つはFからの出口に対応する北方向、2つはFとAに対応する西方向、そして、もう1つはEGとABに対応する東方向である。
拡張交差地点は、交差地点の一部を形成するノードのセット、拡張交差地点に至る道路網エッジ(つまり、交差地点ノードへ接続するエッジ)、そして、拡張交差地点に進入し又はそこから出て行く、拡張交差地点の外側の道路網エッジにより定義される。これらを交差地点出口と呼ぶ。
(後に定義されるアルゴリズムにおける次の段階のための)出口の位置を検討する必要のある場所は、出発地点の出口であるノードの位置であるとされる。
拡張交差地点は概念上の中心点を有し、それは、構成される道路網ノードの平均的位置によって定義される。
拡張交差地点は概念上の中心点を有し、それは、構成される道路網ノードの平均的位置によって定義される。
多くの場合(交差地点が単一のノードを構成するような些細なものも含む)、認容される概略図画像は、単に、全て同一の場所から出発する各出口に対応する単一の道路、つまり、交差地点中心部とともに線図を描くことにより、生成される。
この例が,図20A、20B及び20Cである。図20Aは複雑な交差地点についてのMasterMapデータを示し、図20Bは同じ交差地点に対応する道路網データ(例えばTeleAtlas)を示し、図20Cはその交差地点の簡略化された概略図を示す。様々な出口を点として交差地点を概念化することの利点は、概略図が生成される際に、表示される正確な角度と線引が、より標準的な表現となるように処理することができることにある。例えば、図20Cのように、出口は、特定の許容範囲内で、相互に垂直に又は逆行に“折り曲げる”(”snapped”)することができる。
しかしながら場合によっては、同一地点から発する出口の全てを描写することはできない。例えば、図17の複雑な交差地点においては、明確に区別できるが、ほぼ並行な西方向への出口がある。同一の場所で2つの出口を描写したくないもう1つの理由は、交差地点が明らかにねじれの位置にある場合である。
これらの場合には、概略図生成プロセスにおいて更なるステップがある。生成される概略図の複雑さを最小限にしつつも、交差地点の本当の形を伝えるために、交差地点簡略化モジュールは、グループ内の各出口が同一の地点から発するものとして表示される出口のグループを探索する。そのようなグループは交差地点の“群”と呼ばれる。出口が同一の場所に表示される場合は、それらは同一の群にのみ属することになる。交差地点簡略化アルゴリズムは、群の数を最小化しようとし、それ故、各群に属する出口の数を最大化することになる。
交差地点簡略化アルゴリズムは以下のステップを有する。
・外側の交差地点エッジに基づき交差地点出口を定義する。
・交差地点出口を群にグルーピングする。
・群同士の配置関係を識別する。
・配置関係に優先度をつける。
・外側の交差地点エッジに基づき交差地点出口を定義する。
・交差地点出口を群にグルーピングする。
・群同士の配置関係を識別する。
・配置関係に優先度をつける。
交差地点出口の定義づけ
簡略化アルゴリズムは、まず拡張交差地点の外側のエッジに基づき交差地点出口のセットを生成する。各交差地点出口はその特性として以下のものを有する。
・出口に対応する外側エッジ
・外側エッジが交差地点を離れる地点の角度
・外側エッジが接続する交差地点ノードの位置として扱われる出口の位置
簡略化アルゴリズムは、まず拡張交差地点の外側のエッジに基づき交差地点出口のセットを生成する。各交差地点出口はその特性として以下のものを有する。
・出口に対応する外側エッジ
・外側エッジが交差地点を離れる地点の角度
・外側エッジが接続する交差地点ノードの位置として扱われる出口の位置
2つの出口が中央分離帯を有する道路の一部である場合は、その出口は同じ出口であるとみなされる。
出口に対応する外側エッジ(地形ソースデータからの道路網上のエッジ)は、必ずしも直線ではないので、代わりの角度が選択される。出口に関する角度を決定については、様々な手法が利用できる。以下がその例である。
・一定距離以上(例えば50メートル以上)のポリラインセグメント(polyline segment)の平均角度を算出すること。
・一定距離以上のポリラインセグメントの角度を明確な値域の数にグルーピングし、最も頻度の高い値域に基づき、角度を選択する。
・ポリラインセグメントの角度が閾値(例えば90度)を超える場合、残りの角度は無視してもよい。
・ポリラインセグメントと一定距離の地点から始まるノードに接続する直線の角度を計算する。
・前記手法のいずれか1つに基づき選択された角度が、ビルと交差する出口であると定義された場合(MasterMapデータによるもの)、これは、ビルの周囲の道路の屈曲に対応するものとされうる。この場合は異なる角度が選択されうる。
・一定距離以上(例えば50メートル以上)のポリラインセグメント(polyline segment)の平均角度を算出すること。
・一定距離以上のポリラインセグメントの角度を明確な値域の数にグルーピングし、最も頻度の高い値域に基づき、角度を選択する。
・ポリラインセグメントの角度が閾値(例えば90度)を超える場合、残りの角度は無視してもよい。
・ポリラインセグメントと一定距離の地点から始まるノードに接続する直線の角度を計算する。
・前記手法のいずれか1つに基づき選択された角度が、ビルと交差する出口であると定義された場合(MasterMapデータによるもの)、これは、ビルの周囲の道路の屈曲に対応するものとされうる。この場合は異なる角度が選択されうる。
ソースデータにおいて1組のエッジとしてフラグ付けされることで、中央分離帯のある道路と定義付けられる場合、角度と位置の属性は、エッジの角度と開始位置のそれぞれの平均値とされる。
交差地点出口の群へのグルーピング
拡張交差地点に対する出口のセットが、その角度及び位置の属性とともに決定されると、出口の群が識別される。出口の群は同一地点から描くことができる出口をグループ化したものである。
拡張交差地点に対する出口のセットが、その角度及び位置の属性とともに決定されると、出口の群が識別される。出口の群は同一地点から描くことができる出口をグループ化したものである。
群の識別の最初のステップは、同一の群に属すことができない出口の組を識別することである。理由としては、それらが、ほぼ逆行であるが、位置的にはっきりと分離しているため、“ねじれた”出口の組に対応するため、あるいは、完全に並行であり、同一地点に表示することができないためである。ここでいう“ほぼ”と“完全に”は、実験によって設定される特定の要素により決定される。こうした組における各出口は、自身の新たな群に入れられる。出口の組み合わせが、閾値の角度以内に並行であるか、あるいは閾値の角度以内に逆行であり閾値の距離よりも大きく分離されている場合、出口の組み合わせとして可能な全てが、徹底的にテストされ、決定される。
第2のステップでは、出口が1つの群に入るかどうかを基に、1つの群にのみ属することができない出口を識別する。これにより、出口が他の群の出口でもあるという“ほぼ逆行”の関係は除外されることになる。
群分けアルゴリズムの第3及び最後のステップでは、群に未だ入っていない出口は、存在する最も適した群に割り当てられる。これを行なうために、出口は交差地点の周囲に“時計回り”に並べられる。この時計回りへの配置は、拡張交差地点の中心周辺の出口の位置に基づき、最初に行われる。同じ位置にある出口は、各出口と、拡張交差地点の中心から出口の位置までに内在するベクトルの間との角度に基づき、更に配置される。
そして出口は、この出口の配置を維持しつつ、最も近い群に割り当てられる。割当アルゴリズムは、出口がその時計回りに連続して配置しているものとみなす。最初の出口は、最も近い群に割り当てられる。アルゴリズムは、全ての出口が割り当てられるまで、時計回りで全ての出口について続けられる。
具体例
群アルゴリズムがどのように作用するかについて、図17に示された道路網データの例を再び参照し、ノードF、E及びAにより構成される拡張交差地点を検討する。
群アルゴリズムがどのように作用するかについて、図17に示された道路網データの例を再び参照し、ノードF、E及びAにより構成される拡張交差地点を検討する。
図21は、ラベル付けされた出口を有する拡張交差地点を示す。外側の交差地点エッジEGとABは、同一の中央分離帯道路の2つの車線としてソースデータにおいてフラグ付けされている。これらは、交差地点簡略化モジュールにより同一の出口として識別される。
それ故、図21では、e1、e2、e3、及びe4でラベル付けされた合計4つの出口が示されている。
群識別の第1ステップにおいては、どれを別々の群に割り当てるかを決定するために出口が検討される。例では、e3とe4が、ほぼ並行なので、2つの別々の群C1とC2に割り当てられる。この段階では、出口e1とe2はまだ群に割り当てられてない。
第2段階では、残りのエッジが検討される。出口e1は、ほぼ(群C2の)e4と逆行であるので、(e3を含むかぎりにおいて)群C1に属することはできない。同様に、e1はC2にも属することはできない。このような出口は、新しい、別の群に入れられる、つまりここでは、e1は新しい群C3に入れられる。
こうして群が定義され、残りの出口はそれぞれの最も近い群に割り当てられる。ここでは出口e2は群C1に割り当てられる。
群同士の配置の関係性の識別
交差地点に対する概略図の生成の次の段階は、ユーザが認知するものとしての交差地点の重要な外観構造に関連する群同士の関係性の識別に関するものである。これらの関係性は概略図中に群がどのような位置にあるのかを定義するものである。図22の例においては、e1とe4がほぼ逆行であるということが、C2とC3の間の関係性を定義づける。図15の現実の地形を参照すると、多くのユーザが、これらの出口が同じ道路に属していることを認識することは明らかであろう。並行と垂直の角度を利用し、可能な限り水平線、垂直線を描くことにより、これらの関係性の多くをできる限り維持しつつ、その一方で概略図の複雑さを最小化することが目的である。
交差地点に対する概略図の生成の次の段階は、ユーザが認知するものとしての交差地点の重要な外観構造に関連する群同士の関係性の識別に関するものである。これらの関係性は概略図中に群がどのような位置にあるのかを定義するものである。図22の例においては、e1とe4がほぼ逆行であるということが、C2とC3の間の関係性を定義づける。図15の現実の地形を参照すると、多くのユーザが、これらの出口が同じ道路に属していることを認識することは明らかであろう。並行と垂直の角度を利用し、可能な限り水平線、垂直線を描くことにより、これらの関係性の多くをできる限り維持しつつ、その一方で概略図の複雑さを最小化することが目的である。
これらの関係性のセットは、他の全ての群に関する各群の配置のマトリクスによって表現される。これを配置マトリクスと呼ぶ。配置は、2つの群に含まれる出口の各組の関係性の強さに従って、ある群と他の群の“最も”関連性のある位置を表現したベクトルである。これらの関係性は、出口同士の配置が並行であるか、逆行であるというものでもよい。
並行の関係性は、ねじれた出口同士の現実の状態に対応する。逆行の関係性は、実質的に直線で相互に接続される2つの道路区間の状態に対応する。
従がって、出口間が、ほぼ並行の関係性を有している場合、これらを拡張交差地点から外れた、ねじれた並行の出口として描くことができる(そしてその利点がある)。この例が図23Aであり、2つのほぼ並行な出口の元々の関係性が示されている。そして図23Cはこの関係性の簡略化された表現を示している。
同様に、2つの出口が相互に逆行に近い関係性を有している場合、それらを、直線化し、直線で接続する簡略化する方法で描くことができる。これは図24Aに表され、2つのほぼ逆行出口の元々の関係性が示されている。図24Cはこの関係性の簡略化された表現を示している。
関係性の強さは、並行又は逆行の関係性に従がって、どれくらい現実の地形に近いかに関係する。それは、出口を動かすために要求される摂動項で定義され、その結果出口は完全にその関係性を満たす様式で表現される。
中央分離帯を有する道路に対応する出口の場合、道路の両側の地形が考慮される。更詳しくは、道路の名前を考慮に入れてもよいが、これは交差地点を通る1本の道路が、直線として表示される可能性を増加させるためである。道路の“重要性”(つまり中央分離帯道路、主要道路、主要でない道路)もまた考慮に入れてもよい。
ほぼ逆行の関係性の強さの算出は図24Bに示されている。出口422及び424(矢印で示される)は逆行に近い。出口の角度の調整とは別に、逆行の関係性(直線で接続された2つの道路区間に対応するもの)を完全に満たすためには、出口の1つは、特定の距離(摂動)だけ移動される必要がある。摂動ベクトル430は、関係性を満たすために要求されるこのシフトを表している。
ほぼ並行の関係性の強さの算出は図23Bに示されている。ここでは、出口402及び404は並行に近い(ねじれ出口に対応する)。摂動ベクトル410は
一直線上に接続する道路区間に対して垂直なねじれ出口として出口を表現するために要求されるシフトを表している。
一直線上に接続する道路区間に対して垂直なねじれ出口として出口を表現するために要求されるシフトを表している。
いずれの場合においても、関係性の強さは、摂動ベクトルの長さに対して反比例する。つまり、摂動ベクトルが短いほど、関係性は強くなる。
実施例によっては、摂動ベクトルの長さに加えて摂動角度(図23B及び24Bにの双方にαで示される)もまた関係性の強さを決定する際の判断材料となる。
2つの出口の群における関連する場所を決定するために、全ての出口の群同士の最も強い関連性が識別される。
群同士において、第1の群における各出口と第2の群における各出口との間の最も強い関連性が表された配置マトリクスに入力される。
逆行の関係性は、観測者が普通にまっすぐ接続すると通常認識する拡張交差地点の入口側か出口側のいづれかの2つの出口に対応する。そしてそれ故、そうした関連性は、観察者にとって、並行でねじれ出口型の関係性よりも、より重要度が高いと考えられる。
交差地点簡略化アルゴリズムはそれ故、最も強い逆行関係を最初に検索する。そしてこれを、検討したうえで2つの群の間の最も強い関係性として選択する。逆行関係が見つからない場合は、最も強い並行関係が群同士の最も強い関係である。
この関係性は配置マトリクスに入れられ、群の組の配置は制限されることになる。並行関係も逆行関係も2つの群の各出口間に存在しない場合は、配置マトリクスにおける対応するエントリーは無いままで、かつ、未定義の2つの群の関係性はそのまま残される。
このアルゴリズムは以下のように要約してもよい。
For each pair of clumps < C1、 C2 >
Find strongest anti−parallel relationship of all pairs < el EC1、 e2 E C2 >
If none found:
find strongest parallel relationship of all pairs < eleCl、 e2 E C2 >
Enter strongest relationship found into alignment matrix forCl、 C2、 or leave blank if none found
For each pair of clumps < C1、 C2 >
Find strongest anti−parallel relationship of all pairs < el EC1、 e2 E C2 >
If none found:
find strongest parallel relationship of all pairs < eleCl、 e2 E C2 >
Enter strongest relationship found into alignment matrix forCl、 C2、 or leave blank if none found
中央分離帯を有する道路の場合においては、両方の道路区間が検討される。従がって、中央分離帯道路を表す出口と他の出口間の最も強い関連性は、中央分離帯道路と他の出口間の2つのうち関連性の強い方のいずれかとなる。
図22の例においては、e1とe4の間に逆行関係がある。e1を定義する道路の南側とe4を定義する道路はほぼ完全に並行であるため、この関係性は非常に強いものであるといえる。e1とe3の間にも逆行関係があるものの、これはe1とe4との間の関係性ほど強くはない。
群C2とC1について考えてみると、e3とe4の間には並行関係があり、e2とe4には垂直関係がある。この場合、並行関係の方が、それが有する実際の角度と位置により、強い関係性を持つ。実際のところ、これら2つの関連性は、双方の条件を満たす場所で線図を描くことができるため、相互に矛盾するものとはならない。C2に関連してC1の最適な配置を表す、配置マトリクスにおける入力は、e3とe4の方向の平均値によって定義される並行関係に対して垂直のベクトルとなる。
配置マトリクスは、最も関連する群の位置を表現するこれらのベクトルに満たされる。場合によっては2つの群は特に適した配置を有さないが、この場合、マトリクスには関連するエントリーは無いことになる。数学用語では、このマトリクスは3重対角行列であり、様々な群の相対位置関係に対する制約を表現する。
配置マトリクスは、配置ベクトルと関係性の強さという意味で、群の全ての組同士の間の最も強い関係性を定義づける。上述したように、関係性の強さは、ある出口(他の出口に関連する)を要求された位置にシフトするために必要な摂動によって与えられる。配置ベクトルは一度そのようにシフトされた2つの出口に接続する線の角度と長さを与える。
配置関係の優先づけ
最適な概略図を描くために、交差地点簡略化アルゴリズムは、配置マトリクスによって特定された制限を最も充足する群の位置を検索する。一般に、それら全てを満たすことは不可能であろうし、又、他より劣る位置もあるかもしれない。言い換えるならば、本システムは、制約が過剰又は過小であってもよい。
最適な概略図を描くために、交差地点簡略化アルゴリズムは、配置マトリクスによって特定された制限を最も充足する群の位置を検索する。一般に、それら全てを満たすことは不可能であろうし、又、他より劣る位置もあるかもしれない。言い換えるならば、本システムは、制約が過剰又は過小であってもよい。
交差地点簡略化アルゴリズムは最初に、マトリクスにおける最も強い制約を識別すし(その制約を充足するためにマトリクスは道路網の最小の摂動を要求する)、関係する2つの群の相対位置を固定する。この制限は、制約の指令リストへの最初の入力として追加され、対応するマトリクスの入力は除去される。
固定されていない残された群と既に固定された群のそれぞれの関係性は、空でない入力をマトリクス内で検索することにより評価される。残された最も強い制限は別の群と固定された又は固定されてない群の位置を定義する。この制限は(2番目の場所の)指令リストに追加され、そのエントリーは配置マトリクスから再び除去される。この処理は、配置マトリクスから残された制限が無くなるまで繰り返される。残された固定されていない群間の制限は、(もしあれば)、それらの実際の相対位置に基づき創出される。
他の周知の最適化技術を、配置マトリクスにより特定された制限を最も良く充足する群の配置を識別するために用いることもできる。
制約の指令リストはこうして制限についての優先順位付けを定義づけられる。
これにより、概略図の描画プランを立案することができる。図21と図22の例では、
立案されるプランは、e1とe4により定義される方向に、C2に関連するC3を描き、e2とe3の垂直方向にC2に関連するC3を描くものである。このプランは交差地点描画モジュール246への入力として提供されるものである。
立案されるプランは、e1とe4により定義される方向に、C2に関連するC3を描き、e2とe3の垂直方向にC2に関連するC3を描くものである。このプランは交差地点描画モジュール246への入力として提供されるものである。
上記のアルゴリズムによる概略図は、交差地点が二重になるものであったり、不正確な表現であったりすることがあり得るが、しかし、実際は満足する結果となっている。
6.4.3 交差地点描画モジュール
交差地点描画モジュール246を以下説明する。
交差地点描画モジュール246を以下説明する。
拡張交差地点の描画のためのプランが、交差地点簡略化モジュールにより生成されることで概略図を描くことができる。
そのプランにより定義された制限は順番に処理される。第1の制約に関係する群は任意に固定される。(例えば、描画エリアの中央)。その制約に関係する他の群は、見た目に美しい数値(例えば、水平、垂直、可能であれば45度など)になるよう“スナップ”(”snapped”)された後、その制限により表現される角度において、第1の群に固定された距離で、描画される。合計で3つの群かそれ以下である場合は、この固定された距離は、画面のサイズに基づき計算され、制約における実際の長さは無視される。4つの群かそれ以上の場合は、群間の距離は、画面サイズ及び制約における長さに比例するものとなる。(これは、現実世界の元来の距離とおよそ対応するものとなる。)この4つ又はそれ以上交差地点に対する取り扱いは、長さが無視されることによって簡略化がされ過ぎて、交差地点の構成が破壊されてしまうため、複雑な交差地点に対しては特に必要とされるものである。
このように固定される全ての群の位置付けは、どこの群に属する出口が描かれるかを定義する。出口の角度は適当な角度(例えば、22.5度又は45度づつ)でスナップ(snapped)される。拡張交差地点内の構成は表示されない。
図21の拡張交差地点を交差地点簡略化モジュールが表現し、そこから派生する抽象化交差地点の表現例が、図25に示されている。結果としてできあがる概略図が図26に示される。拡張交差地点それ自身は、差地点から出て行く交差地点出口を表す道路領域とともに、概略図の中心に単純な三角形で表現さる。全ての角度と線は、水平、垂直あるいは45度である。又、認識される交差地点の構成は維持しつつ、線の長さは均等である。
道路領域の長さは、道路分類と、問題となる交差地点出口が経路上にあるかどうかに基づき選択される。可能な長さは、移動端末の種類又は解像度ごとに固定される。こうして、望ましい強調が行われる。例えば、経路の一部である出口に対しては、そうでない出口に比べて長い道路スタブを表示する。
又、概略図は、経路が画面の下部から縦に始まるように方向づけられる。
上述の説明は、現実世界の複雑な交差地点を表現する拡張交差地点に絞って述べている。立体交差の場合のステップも、群配置マトリクスが構築されるところまでは同じステップである。立体交差からの出口は群へ帰着するものの、概略図上の群の位置付けのプランは、(環状の)立体交差の中心と関連する群の位置を表現することによって構築される。
区間ビュー
簡略化交差地点図形は、特に小型又は中型の移動端末の画面への概略図生成に適している。、同一の交差地点簡略化方法を、より大きな経路セクション、例えば、全行程の区間の概略図作成に用いてもよい。こうした概略図は大型の移動端末の画面に適している。このような区間ビューでは通常、個々の拡張交差地点についての概略図を直線又は点線で関係付けることによって、同一の概略図内に複数の交差地点が表示される。これは図27Bによって例示される。図27Bは図27Aに示す現実世界の道路網の概略図の表示である。
簡略化交差地点図形は、特に小型又は中型の移動端末の画面への概略図生成に適している。、同一の交差地点簡略化方法を、より大きな経路セクション、例えば、全行程の区間の概略図作成に用いてもよい。こうした概略図は大型の移動端末の画面に適している。このような区間ビューでは通常、個々の拡張交差地点についての概略図を直線又は点線で関係付けることによって、同一の概略図内に複数の交差地点が表示される。これは図27Bによって例示される。図27Bは図27Aに示す現実世界の道路網の概略図の表示である。
概略図における交差地点相互を隔てる距離については、現実世界の距離を反映させる必要は全く無い。ユーザへの適切な情報は、どのように交差地点を案内するかであるからである。画面における実際の距離は、携帯電話の画面に適するように選択されるユーザが方向を変える(右左折する)必要がある交差地点間の道路網は、図27Bにみられるように、重要でなく、完全に無視されてもよい。現実の道路で右左折が重要な意味を有する場合は、その概略図は折れ線や曲線を用いて関連付けられる。画面上における交差地点間の隔たりが、現実の距離を反映していないということは、従来からの地図記号を用いて表示することができる。この考え方は、図28A、28B及び28Cに示されている。
6.4.4. 関心地点配置・ラベリングモジュール
関心地点配置・ラベリングモジュールは背景情報とラベリング情報を概略図に加える。
関心地点配置・ラベリングモジュールは背景情報とラベリング情報を概略図に加える。
関心地点は経路全体について事前に関心地点セレクタにより識別されている。選択される各関心地点は、経路に沿った特定のノードと関連付けられている。
簡略化交差地点図形ジェネレイタにより生成された概略図の場合、経路上に存在する拡張交差地点ノードと関連付けられた全ての関心地点は、概略図内に含まれるものとみなされる。経路上にないノード又は道路区間の近くに位置する関心地点は一般に、関心地点セレクタによっては選択されず、そのため考慮されない。
関心地点はディスプレイ上に、概略図の種類や、他の制約(画面サイズなど)に従がって、以下のような様々な手法のうちの1つの手法で表示される。
・ポイントとして表示
・ビルの外観又は輪郭として表示
・抽象化された間口として表示
・ポイントとして表示
・ビルの外観又は輪郭として表示
・抽象化された間口として表示
ポイントとしての関心地点表示
これは典型的には、小型のディスプレイに用いられる。又は、複数の関心地点が通路図形に存在することから生じる混乱を避けるために用いられる。
これは典型的には、小型のディスプレイに用いられる。又は、複数の関心地点が通路図形に存在することから生じる混乱を避けるために用いられる。
図9から図12は、関心地点がポイントとして表示されている概略図の例である。
ビルの外観又は外形としての関心地点表示
この例は、ノードイメージャ(node imager)について既に説明したものであり、関心地点はビルのシルエットとして示される。
この例は、ノードイメージャ(node imager)について既に説明したものであり、関心地点はビルのシルエットとして示される。
抽象化された間口としての関心地点表示
この方式では、道路から見た間口の抽象化表現が生成される。
この方式では、道路から見た間口の抽象化表現が生成される。
交差地点に近い関心地点の以下の特性が、関心地点の表示の際以下のように考慮される。
1)関心地点が所定の道路から完全に見ることができるかどうか。
2)関心地点が所定の道路からどれくらい大きさで見えるか。これは以下のいずれかに分類される。
a) 小
b) 中
c) 大
3)関心地点が交差地点にどれくらい近いか。これは以下のいずれかに分類される。
a) 交差地点上にある
b) 交差地点の近く
c) 交差地点に近くない
1)関心地点が所定の道路から完全に見ることができるかどうか。
2)関心地点が所定の道路からどれくらい大きさで見えるか。これは以下のいずれかに分類される。
a) 小
b) 中
c) 大
3)関心地点が交差地点にどれくらい近いか。これは以下のいずれかに分類される。
a) 交差地点上にある
b) 交差地点の近く
c) 交差地点に近くない
関心地点の形、エリア、道路からの距離といった関心地点のその他の特性は、重要度が低いとみなされる。関心地点が所定の道路から見ることができるかどうかの特性は、個人の家である場合は特に重要である。単に、家の住所の一部の数字がラベリング去れている場合、この住所がどの道路にあるかを示すことが重要であるからである。
交差地点図形を背景として関心地点が表示される場合、交差地点において関心地点を囲む2つの出口に関して、関心地点のために上記特性が算出される。これら2つの出口は、交差地点の中央から見た場合、交差地点の左側と右側への出口である。特性は、ビルのOrdinance Survey MasterMapの図形を用いて計算される。
1)は、ビルの図形上の道路へ最も近い地点から、道路上のこの最も近い点まで描かれた線が、他のビルと交差しているか否かを決定することにより算出される。
2)は、関心地点の図形を道路に投影し、その投影したものの長さを測る
ことにより算出される。
3)は、関心地点の図形を道路に投影し、その投影したものから交差地点
までの距離を測ることにより算出される。
2)は、関心地点の図形を道路に投影し、その投影したものの長さを測る
ことにより算出される。
3)は、関心地点の図形を道路に投影し、その投影したものから交差地点
までの距離を測ることにより算出される。
交差地点のこれらの特性が算出されると、その特性により関心地点が抽象的に表現され、関心地点の現実の地形は廃棄される。
この情報を表示することで、各道路沿いの関心地点の間口を、関心地点が見える場所から描くことができる。ユーザが適切な線の形式を用いることで、画面は、実際のビルの2次元の形を表現するのではなく、この間口のみを表示することができる。
具体例が図29Aと29Bに示されている。図29Aは問題となる交差地点についてのOrdinance Survey MasterMapデータを示している。表示のために関心地点として選択されたビルは、斜線で示される。図29Bは交差地点の簡略化交差地点図形を示し、ビルの間口を表しつつ、表示される関心地点の簡略表現も示されている。
図29Bにおいては、交差地点は、完全な十字路として簡略化されている。ビルの1方向は他方よりも長いが、これは、交差地点のユーザには関係のないことである。両方の道路について、その特性は、上記2)のc(大)である。同様に、ある道路が他の道路からよりも遠いということも関係がない。関心地点は交差地点の角にあり、いづれかの道路から見ることができる。
図30Aと30Bは、同一の交差地点の異なる関心地点についての同様の例を示している。この例では、関心地点は1つの道路からのみ見ることができる。この道路沿いのビルの間口は、中くらいの長さであると分類されている。他の各道路に沿って(いずれかの方向から)交差地点に近づいてくるユーザは、自分が交差地点に到達するまではその関心地点は見ることができないであろうことをすぐに理解する。
概略図における形式や、関心地点の道路からの長さ、その補正は、全て、移動端末の種類、画面表示に用いられるスペースを最適化する解像度、表示の美しさに基づいて設定されるものであり、関心地点の現実の地形に影響を受けるものではない。もっとも、上述の関心地点の抽象化特性2)a、b又はcと3)a、b又はcに用いられる数値は別である。
関心地点を、2つの道路(あるいは、上述の用語で拡張交差地点、2つの交差地点出口)沿いの抽象化された間口に変換する技術によって、概略図の画面表示を決定する際に、柔軟性が得られるようになる。つまり関心地点の表示はそのままで、交差地点表示アルゴリズムによって出口は配置され、又は、出口の向きは回転される。
位置図形
上述の簡略化交差地点図形ジェネレイタのバリエーションは、(経路区間ではなく)位置の概観を表現する概略図の生成に用いることができる。そのような位置図は、位置の全般的な情報を提供することにも用いることができる。又、方向図として用いて、通常、道路網の位置を固定し、既知のエリア内で、より正確に自己の位置を判断することができる。
上述の簡略化交差地点図形ジェネレイタのバリエーションは、(経路区間ではなく)位置の概観を表現する概略図の生成に用いることができる。そのような位置図は、位置の全般的な情報を提供することにも用いることができる。又、方向図として用いて、通常、道路網の位置を固定し、既知のエリア内で、より正確に自己の位置を判断することができる。
移動端末のディスプレイ技術の限界による制約のなかで、ユーザに的確な情報を提供するために、位置図又は方向図は、ユーザの位置の簡略化した表示を提供する。
そのような簡略化は、関連の薄い情報の除去や、通常、交差地点における道路同士の角度の相互関係を維持しつつ、カーブした道路を特定許容範囲内で直線化すること含む。
そのような簡略化は、関連の薄い情報の除去や、通常、交差地点における道路同士の角度の相互関係を維持しつつ、カーブした道路を特定許容範囲内で直線化すること含む。
既知のエリア内にある全ての道路網のノードは空間的な検索により識別される。
そしてこれらのノードの情報は拡張交差地点識別モジュールに送られる。このモジュールの出力は拡張交差地点のセットであり、その各々は1又はそれ以上の元のノードのセットを含む。つまり拡張交差地点は道路網上のノードのグループを表現している。
次にこれらの拡張交差地点は、交差地点簡略化モジュール244により簡略化され、交差地点描画モジュール246により描くことができる。関心地点配置・ラベリングモジュール248により、関心地点は、背景として表示された各拡張交差地点上に、表示されても良いし、概略図上に、それ自身固有のものとして別個に表示されるように取り扱われても良い。方向図において形式化された道路網は、上述のように、位置決めされたエリアに該当する非交差地点(の一部)の要素とともに認識された交差地点に基づくものである。
位置図と方向図はこうして位置決めされたエリア全体をカバーする。それは、関心地点の選択と他の背景情報とともに上述のように、道路網データに基づいて形式化された画像を提供する。
例えば、方向図は大きなビルや他の構成要素、エリア(例示:オフィス区画、地下鉄駅、駐車場)からの複数の出口を表現できる。実際の道路の交差地点上に無い出口の場合は、“仮想交差地点”が出口に作成される。仮想交差地点は、どのような場所であっても既存の道路網データによっては道路の交差地点であるとはみなされないが、経路の決定又はユーザの案内を目的として、経路指定アプリケーションにより交差地点とみなされる。
経路外の関心地点
上述の関心地点ランキングスキームは、関心地点を用いた経路表示の際、経路外にある興味のある場所への“ヒント”や“道標”が表示されるように、拡張されてもよい。このような道標の例は、“英国博物館へはこちらから200m”というものであってもよい。この道標は、ユーザが興味を示すようなもの(例えば、お気に入りのコーヒーショップや、旅行者が通り過ぎる、マイプレイスリストに登録されている場所)や、サービスプロバイダがユーザの気を引こうとするもの(例えば広告)を示すことができる。
上述の関心地点ランキングスキームは、関心地点を用いた経路表示の際、経路外にある興味のある場所への“ヒント”や“道標”が表示されるように、拡張されてもよい。このような道標の例は、“英国博物館へはこちらから200m”というものであってもよい。この道標は、ユーザが興味を示すようなもの(例えば、お気に入りのコーヒーショップや、旅行者が通り過ぎる、マイプレイスリストに登録されている場所)や、サービスプロバイダがユーザの気を引こうとするもの(例えば広告)を示すことができる。
このために、良く知られたマークを用いた表示アイコンが使用されることになる。例えば、マクドナルドの“M”マークや、ロンドン地下鉄のロゴ、あるいは教会の十字架マークなどである。
ラベリング処理
概略図が画像として組み立てられると、その画像にラベル付けされる。ラベル付けされる地物の数は、利用可能な画面サイズに従がって限定される。各ラベルに対して、ラベル付け可能な場所の個々のセットが、最も分離が小さい距離及び最も分離が大きい距離とともに、ラベル付けされるアイテムの地理上の地点をもとに算出される。そして、一連の距離に位置する各地点の上方、下方、右方、左方のラベル位置を計算する。
概略図が画像として組み立てられると、その画像にラベル付けされる。ラベル付けされる地物の数は、利用可能な画面サイズに従がって限定される。各ラベルに対して、ラベル付け可能な場所の個々のセットが、最も分離が小さい距離及び最も分離が大きい距離とともに、ラベル付けされるアイテムの地理上の地点をもとに算出される。そして、一連の距離に位置する各地点の上方、下方、右方、左方のラベル位置を計算する。
又、ラベル付けが可能な各場所に対し、ラベリングアルゴリズムは、通常、分離した1本及び複数の線の“位置”と更に、ラベルがハイフンで結ばれる位置も算出する。
これらの位置のそれぞれについての“コスト”が、ラベルが付されたアイテムに対するラベルの近さ、他の表示アイテムとの衝突(confrict)、他のアイテムとの重複の度合い、他のラベル(及びその始端部)との衝突、などを用いて算出される。ラベリング処理を避けるべきアイテムの表示について優先順位が割り当てられる(例えば、経路の一部を形成する道路は高い順位で、一方、側道は低い順位である)。又、ラベリング処理されるアイテムについて優先順位が割り当てられる(例えば、ユーザが右左折する必要のある次の道路は高い順位で、一方セグメントの途中にある側道は低い順位である。交差地点の近くにある大きな関心地点ビルは高い順位で、小さいものは低い順位である)。多くの衝突が発見された場合、高いコストはラベル付け可能な位置がないことと関連付けられてもよいが、この段階ではラベル付け可能な位置がないことは無視される。
ダミーの“見えない”コストは、実際には表示されないラベルと関連するコストが存在することを意味する。このコストの値は、いくつかの特に適切でない位置が、全く表示が無い場合よりもコスト高とみなされるように選択される。ラベルが背景地形や道路と相互に影響する場合、又は、ラベルが1本又は複数の線で表示されるか、あるいはハイフンで結ばれているかによって、コスト関数は当該ラベルにコストペナルティを割り当てる。
コスト関数は又、ラベル付けされたアイテムからラベルまでの距離に依存する。ラベル付けされる各アイテムは優先順位を持っている。すなわち、例えば、上位5つのラベルというように、最も高い優先順位のラベルのみが考慮に入れられる。そして、優先順位はどのような種類のアイテムがラベル付けされるかによって決定される。例えば経路に関して、概略図の外部に続く道路は、最も高い優先順位が与えられ、次に主要な関心地点が続き、その次に概略図内に描かれる道路となる。
全てのラベルについて最適な構成は、全てのラベル位置の、全ての組み合わせの決定位置を検討することにより、探索される。決定の可能性(全てのラベルの構成、ラベル付けが可能な場所のうちの1つのそれぞれ)を設定すると、その決定は各ラベル位置のコストの評価と、その位置におけるラベル同士の相互の衝突によりランク付けされる。これは古典的な最適化の問題であり、骨の折れるサーチや、擬似アニーリング(simmulated annealing)、あるいは他の適切な周知の方法によって解決してもよい。
最も優先順位の高い関心地点については、異なるラベル位置のコストが計算される。そして、優先順位の高いアイテムについてのラベル位置の組み合わせを最適化する試みによって、最適な最終位置が算出される。このことによりいくつかはラベル付けされないことになる。なぜならば、特定の組み合わせについては、ラベル付けのコストが、全く表示しない場合のコストを上回るからである。その後、ラベル付けされるどのアイテムも、最も高い優先順位から最も低い優先順位まで検討される。これは、“先着順”で行われる。つまり、次のアイテムが検討され、そして、もし”見えない”コストよりも小さいコストを有するラベル位置が発見された場合は、そのアイテムはその位置で表示され、ラベル付けされる、そうでなければ表示されない。
関心地点はラベルなしには表示されない。これはつまり、所定のラベリング処理において、そのラベルは表示しない場合、関心地点は概略図から除去されることを意味する。逆にいうと、始点と終点における関心地点は常に表示される。
追加情報
追加的な情報が、ユーザを更に補助するために概略図に表示される。
追加的な情報が、ユーザを更に補助するために概略図に表示される。
交差地点において、1又はそれ以上の矢印が概略図に追加され、交差地点を通過する提案経路が示される。その経路を辿る際、交差地点にさしかかる道路区間と、その交差地点から出た所の道路区間との間の角度が所定の閾値より小さい場合、原則としてユーザは、真っ直ぐ進む、と指示される。
この例では、単一の矢印が交差地点の中央に表示される。もしその角度が閾値を超える場合は、右左折を表示し、2つの矢印が描かれる。1つは交差地点への進入路を表し、もう一方は交差地点からの退出路を表す。
他の表示される追加情報の例は、太陽、月、その影(現在日時と天候にしたがう)の現在位置を視覚的に表示を用いるものであり、ユーザは移動端末上に表示される概略図と比較して現在時点の方向を決定することができる。
移動端末によっては方位磁針(compusses)を有するものもある。それは概略図を画面上に描くために用いるか、ユーザの現在の方向の視覚表示を提供するために用いられる。
完成する経路図形は、要求があれば、テキスト表現によって補強されてもよい。それは、テキストとして表現される方向や、距離、残された旅程の時間を用いるものである。
これまで述べてきた本発明はあくまでも実施の一例であり、微細な点についての変更は本発明の範囲内で行ない得ることは明白であろう。
本明細書中の各特徴点及び、(必要であれば)特許請求の範囲と図面は独立して提供されるものであってもよいし、適切な組み合わせであってもよい。
本明細書中の各特徴点及び、(必要であれば)特許請求の範囲と図面は独立して提供されるものであってもよいし、適切な組み合わせであってもよい。
Claims (105)
- 地理的交通網の表示データを生成する方法であって、
地理的交通網の表現であるノードと前記ノードに接続されるエッジを含むデータベースを用い、
(a)少なくとも1つの前記ノードと少なくとも1つの前記エッジを含む拡張交差地点に関連するデータベースからデータを抽出するステップと、
(b)前記抽出データを出力するステップとを備える
方法。 - 請求項1に記載の方法において、
データを抽出する前記ステップは、
(i)前記拡張交差地点の一部を形成するノードを前記データベースから抽出するステップと、
(ii)前記拡張交差地点の一部を形成し、前記抽出されたノードに接続された少なくとも1つのエッジを規定の基準に基づき前記データベースから抽出するステップとを備える
方法。 - 請求項2に記載の方法において、
データを抽出する前記ステップは、
エッジの長さが規定の長さより短い場合、前記エッジを抽出するステップを備える
方法。 - 請求項2又は3に記載の方法において、
データを抽出する前記ステップは、
前記データベースにおいて関連するフラグに基づき、エッジを抽出するステップを備える
方法。 - 請求項2から4いずれか1項に記載の方法において、
データを抽出する前記ステップは、
前記データベースから既に抽出された他のエッジに関連するデータに基づき、エッジを抽出するステップを備える
方法。 - 請求項2から5いずれか1項に記載の方法において、
データを抽出する前記ステップは、
エッジが立体交差、2車線道路及び中央分離帯のような道路人工物の要素である場合、前記エッジを抽出するステップを備える
方法。 - 請求項6に記載の方法において、
データを抽出する前記ステップは、
前記エッジが道路人工物かどうかを判定するため前記エッジの周辺の前記交通網を分析するステップを更に備える
方法。 - 上記いずれかの請求項に記載の方法において、
データを抽出する前記ステップは、
前記抽出したいくつかのエッジに接続された少なくとも1つのノードを抽出するステップを更に備える
方法。 - 上記いずれかの請求項に記載の方法において、
データを抽出する前記ステップは、
前記拡張交差地点の一部を形成しなくても前記拡張交差点に接続された少なくとも1つのエッジを抽出するステップを更に備える
方法。 - 上記いずれかの請求項に記載の方法において、
抽出データを出力する前記ステップは、
ユーザの端末装置に前記抽出データを送信するステップを更に備える
方法。 - 上記いずれかの請求項に記載の方法において、
前記抽出データは携帯端末装置の画面に表示され、好ましくは、概略図の形式で表示されるステップを更に備える
方法。 - 請求項2から11に記載の方法において、
前記データベース内の他のノードを更に抽出することによって、更に拡張された交差地点に関連する他のデータを抽出するステップと、
前記抽出ノードに接続される1つ以上の他のエッジを識別し、更に規定される基準を満たすステップと、
前記更に拡張された交差地点に関連する前記他のデータを更に出力するステップとを更に備える
方法。 - 地理的交通網の表示データを処理する方法において、
前記交通網は、エッジによって接続されたノードから形成され、前記エッジを抽出するステップと、
前記エッジが人工物の要素であるかどうかを判定するために前記抽出エッジ付近の前記交通網の一部を分析するステップと、
前記分析の結果に対応して前記抽出エッジを処理するステップとを備える
地理的交通網の表示データを処理する方法。 - 請求項13に記載の方法において、
分析する前記ステップは、
前記抽出エッジ付近の交通網の一部の配置が規定の基準を満たすかどうかを判定するステップを備える
方法。 - 請求項13又は14に記載の方法において、
前記交通網は道路網であり、
前記交通網を分析する前記ステップは、中央分離帯の一部を形成する前記エッジかどうかを判定するステップを備える
方法。 - 上記いずれかの請求項に記載の方法において、
抽出したノードの組と、修正アルゴリズムに基づくエッジとを処理するステップを更に備える
方法。 - 地理的交通網の表示データを処理する方法であって、
a)データベースから前記データを検索するステップと、
b)修正アルゴリズムに基づき前記データを処理するステップと、
c)前記処理データを出力するステップとを備える方法。 - 請求項16又は17に記載の方法において、
前記修正アルゴリズムは、データを地形的に簡略化する
方法。 - 請求項16から18いずれか1項に記載の方法において、
前記データは、複数のノードを含み、
前記修正アルゴリズムは、前記ノードの相対位置を調節する
方法。 - 請求項16から19いずれか1項に記載の方法において、
前記データは、複数のエッジを含み、
前記修正アルゴリズムは、少なくとも2つのエッジの間の相対角度を調節する
方法。 - 請求項20に記載の方法において、
前記修正アルゴリズムは、少なくとも2つのエッジの相対角度を、優先する角度の組の1つにする(snaps)
方法。 - 請求項20又は21に記載の方法において、
前記修正アルゴリズムは、少なくとも2つのエッジの相対角度を並行又は逆行に調節する
方法。 - 請求行16から22いずれか1項に記載の方法において、
前記修正アルゴリズムは、
a)異なる要素のデータ間で、望ましい配置関係を識別するステップと、
b)識別された望ましい関係を最も満足する配置を提供するため、前記要素の相対位置を調節するステップとを備える
方法。 - 請求行23に記載の方法において、
前記データは、少なくとも1つのノードと、前記ノードに接続された少なくとも1つのエッジを含み、
少なくとも1つの交差地点の出口は表示され、
前記修正アルゴリズムは、少なくとも1つのエッジを、交差地点の出口として識別するステップと、
識別された望ましい関係を最も満足する配置を提供するため、前記交差地点の出口の相対位置及び/又は角度を調節するステップを備える
方法。 - 請求項23又は24に記載の方法において
規定された関係と要素の形状との類似点に対応した位置関係の強度を算出するステップを更に備える
方法。 - 請求項16から25いずれか1項に記載の方法において、
前記データは、少なくとも1つのノードと、前記ノードに接続された少なくとも1つのエッジを含み、
前記修正アルゴリズムは、エッジ同士の並行関係に優先して、エッジ同士の逆行関係を維持する
方法。 - 請求項16から26いずれか1項に記載の方法において、
前記データは、少なくとも1つのノードと、前記ノードに接続された少なくとも1つのエッジを含み、
前記修正アルゴリズムは、1つ以上の前記エッジを、交差地点の出口として識別するステップと、
前記交差地点の出口をグループ化し交差地点出口群とするステップとを含み、
前記交差地点出口群は同じ点から発するように表示され得る
方法。 - 請求項27に記載の方法において、
前記修正アルゴリズムは、前記群の数を最小化するように試行する
方法。 - 請求項16から28に記載の方法において、
前記データは、少なくとも1つのノードと、前記ノードに接続された少なくとも1つのエッジを含み、
前記修正アルゴリズムは、
a)1以上の前記エッジを、交差地点の出口として識別するステップと
b)前記交差地点出口のそれぞれの角度を決定するステップと、
c)前記交差地点出口の角度に基づいて前記データを修正するステップとを備える
方法。 - 請求項29に記載の方法において、
前記交差地点出口は異なる角度を持つ一連のポリライン線(polyline segment)によって定義され、
前記交差点出口の角度は、表示する角度を決定するために前記ポリライン線を分析することで決定される
方法。 - 上記いずれかの請求項に記載の方法において、
前記抽出あるいは処理されたデータを出力するステップは、
前記データを図形データとして出力し、好ましくは、概略図の形式の図形データとして、前記データを出力するステップを含む
方法。 - 請求項31に記載の方法において、
前記修正アルゴリズムは、選択された画面の形状に合わせて図形データを配置する
方法。 - 上記いずれかの請求項に記載の方法において、
ノードの対として経路を定義する経路データを受信するステップと、
前記ノードの1つの重要度を測定するステップと、
測定された重要度に基づき前記経路データを処理するステップとを更に備える
方法。 - 地理的交通網の表示データを処理する方法であって、
ノードの対として経路を定義する経路データを受信するステップと、
前記ノードの1つの重要度を測定を行なうステップと、
測定された重要度に基づき前記経路データを処理するステップとを備える
方法。 - 請求項33又は34に記載の方法において、
ノードの重要度を測定するステップは、
前記ノードを、重要か無意味かのどちらか1つとして分類するステップを含む
方法。 - 請求項33から35いずれか1項に記載の方法において、
ノードの重要度を測定するステップは、前記ノードに接続された第1のエッジに対応する第1のパラメータと、前記ノードに接続された第2のエッジに対応する第2のパラメータを検索するステップと、
第1と第2のパラメータを比較するステップとを備える
方法。 - 請求項36に記載の方法において、
第1のパラメータは、第1のエッジに対応する等級を含み、
第2のパラメータは、第2のエッジに対応する等級を含む
方法。 - 請求項36から37いずれか1項に記載の方法において、
第1のパラメータは、第1のエッジに対応する道路の名前を含み、
第2のパラメータは、第2のエッジに対応する道路の名前を含む
方法。 - 請求項33から38いずれか1項に記載の方法において、
前記測定された重要度に基づいて複数の経路区間(route segment)に分化するステップを更に備える
方法。 - 請求項33から39いずれか1項に記載の方法において、
複数の前記ノードのそれぞれの重要度を測定するステップを更に備える
方法。 - 請求項40に記載の方法において、
前記測定された重要度に基づき、経路を複数の経路区間に分割するステップを備える
方法 - 請求項33から41いずれか1項に記載の方法において、
経路を複数の経路区間に分割するステップを含み、
前記経路を分割するステップは、
2つの重要なノードによって分けられた複数の経路区間を生成するステップとを備える
方法。 - 請求項33から42いずれか1項に記載の方法において、
経路を複数の経路区間に分割するステップと、
前記経路は、始点ノードと終点ノードを有し、
経路を分割するステップは、
2つの重要なノード、又は、1つの重要なノードと1つの始点ノードと1つの終点ノードとによって分けられた複数の経路区間を生成するステップとを備える
方法。 - 請求項33から43いずれか1項に記載の方法において、
経路を複数の経路区間に分割するステップと、
前記区間が、予定した長さを超える場合、複数の経路区間の1つを更に分割するステップとを更に備える
方法。 - 請求項33から44いずれか1項に記載の方法において、
経路を複数の経路区間に分割するステップと、
前記区間が、規定された数の以上の重要ではないノードを含む場合、複数の経路区間の1つを更に分割するステップとを更に備える - 場所の写実的な概略図を提供する方法において、
a)規定された抽出アルゴリズムに基づいてデータベースから1つ以上の関心地点を抽出するステップと、
b)関心地点を含む写実的な概略図を生成するステップと、
c)生成された写実的な概略図を出力するステップとを備える
方法。 - 請求項46に記載の方法において、
前記アルゴリズムは、
a)関心地点のランク付けを行なうステップと、
b)前記関心地点のランクに基づいて1つ以上の関心地点を抽出するステップとを備える
方法。 - 請求項46又は47いずれか1項に記載の方法において
前記アルゴリズムは、
a)各関心地点に基づいて1つ以上の記録されたパラメータを検索するステップと、
b)各関心地点に関連付けられて記録されたパタメータに基づいて1つ以上の関心地点を抽出するステップとを備える
方法。 - 請求項46から48いずれか1項に記載の方法において、
前記抽出アルゴリズムは、
a)位置を抽出するステップと、
b)抽出した位置から規定された半径以内にある1つ以上の関心地点を抽出するステップとを備える
方法。 - 請求項46から49いずれか1項に記載の方法において、
前記データベースは、複数のノードを含み、
前記抽出アルゴリズムは、
a)ノードを抽出するステップと、
b)前記ノードの周辺の領域の範囲を決定するステップと、
c)前記決定された領域内にある関心地点を抽出するステップとを備える
方法。 - 請求項50に記載の方法において、
前記ノードの周辺の領域の範囲を決定するステップは、
前記ノードを中心とした円で領域を決定するステップを備える
方法。 - 請求項46から51いずれか1項に記載の方法において、
抽出アルゴリズムは、関心地点の視認性に基づき前記データベースから1つ以上の関心地点を抽出する
方法。 - 請求項46から52いずれか1項に記載の方法において、
前記抽出アルゴリズムは、日時に基づき前記データベースから1つ以上の関心地点を抽出する
方法。 - 請求項46から53いずれか1項に記載の方法において、
特定のユーザに対応する気に入った関心地点のリストを記録するステップとを更に含み、
前記抽出アルゴリズムは、前記リストに記録された関心地点を優先的に抽出する
方法。 - 請求項46から54いずれか1項に記載の方法において、
a)道順を計算するステップと、
b)前記計算された道順の表示を示すデータを出力するステップとを更に備える
方法。 - 場所の写実的な概略図を提供する方法であって、
a)道順を計算するステップと、
b)前記計算された道順の表示を示す情報を含む写実的な概略図を生成するステップと、
c)前記写実的な概略図を出力するステップとを備える
方法。 - 請求項55又は56に記載の方法において、
前記情報は、目印(marker)を含む
方法。 - 請求項57に記載の方法において、
前記目印は矢印を含む
方法。 - 請求項55から58いずれか1項に記載の方法において、
前記写実的な概略図は、交差地点に入る進入道路区間と、前記交差地点から出る進出道路区間とを有する交差地点を含み、
進入道路区間と進出道路区間との間の角度を決定するステップと、
前記角度に基づいて、ステップb)において、前記情報を抽出するステップとを備える
方法。 - 請求項58及び59に記載の方法において、
前記写実的な概略図内の前記矢印の数は、前記角度に基づき変化する
方法。 - 上記いずれかの請求項に記載の方法において、
a)月や太陽の現在位置を決定するステップと、
b)月や太陽の前記現在位置を表示するデータを出力するステップとを更に備える
方法。 - 場所の写実的な概略図を提供する方法であって、
a)月や太陽の現在位置を決定するステップと、
b)決定した月や太陽の前記現在位置を示す情報を含む、前記場所の写実的な外略図を生成するステップと、
c)前記概略図を出力するステップとを備える
方法。 - 請求項61又は62に記載の方法において、
前記情報は、目印(marker)を含む
方法。 - 請求項63に記載の方法において、
前記概略図内の前記目印の位置は月や太陽の前記現在位置に対応する
方法。 - 請求項63又は64に記載の方法において、
前記目印は、投影画像を含み、前記投影画像の配置は月や太陽の前記現在位置に対応する
方法。 - 上記いずれかに記載の請求項において、
a)配置(configuration)データを受信するステップと、
b)ステップa)において受信した前記配置データに基づいて写実的な概略図を生成するステップとを更に備える
方法。 - 写実的な概略図のデータを提供する方法であって、
a)配置(configuration)データを受信するステップと、
b)ステップa)において受信した前記配置データに基づいて写実的な概略図を生成するステップと、
c)ステップb)において生成した写実的な概略図を出力するステップとを備える
方法。 - 請求項66又は67に記載の方法において、
前記概略図は端末装置に出力され、
前記配置データは前記端末装置の表示特性である
方法。 - 請求項68に記載の方法において、
前記特性は、前記端末装置の画面解像度である
方法。 - 請求項66から69いずれか1項に記載の方法において、
前記配置データは、ユーザの好みを示す
方法。 - 上記のいずれかに記載の請求項において、
a)データベースから交通網要素を抽出するステップと、
b)規定された抽出アルゴリズムに基づいて、データベースから関心地点を抽出するステップと、
c)ステップa)において抽出された前記交通網要素と、ステップb)において抽出された前記関心地点との間の地理的関係を測定するステップと、
d)ステップc)において測定された前記地理的関係に基づいて、前記関心地点の抽象的表示を生成するステップと、
e)ステップa)において抽出された交通網要素のセットと、ステップd)において生成された前記関心地点の抽象的表示とを含む写実的な概略図を生成するステップと、
f)前記写実的な概略図を出力するステップとを更に備える
方法。 - 場所の写実的な概略図を提供する方法であって、
a)データベースから交通網要素を抽出するステップと、
b)規定された抽出アルゴリズムに基づいて、データベースから関心地点を抽出するステップと、
c)ステップa)において抽出された前記交通網要素と、ステップb)において抽出された前記関心地点との間の地理的関係を測定するステップと、
d)ステップc)において測定された前記地理的関係に基づいて、前記関心地点の抽象的表示を生成するステップと、
e)ステップa)において抽出された交通網要素のセットと、ステップd)において生成された前記関心地点の抽象的表示とを含む写実的な概略図を生成するステップと、
f)前記写実的な概略図を出力するステップとを更に備える
方法。 - 請求項71又は72に記載の方法において、
前記地理的関係は前記エッジから前記関心地点に対する視認性に対応する
方法。 - 請求項71から73いずれか1項に記載の方法において、
前記地理的関係は、前記エッジから前記関心地点を見た時のサイズに対応する
方法。 - 請求項71から74いずれか1項に記載の方法において、
前記地理的関係は、前記エッジから前記関心地点までの距離に対応する
方法。 - 請求項71から75いずれか1項に記載の方法において、
前記関心地点の抽象的表示は、前記エッジに対する前記関心地点の正面の抽象的表現を含む
方法。 - 決められた地理的領域によって囲まれた場所の写実的な概略図を提供する方法であって、
a)データベースから前記決められた領域から外れている1つ以上の関心地点を抽出するステップと、
b)前記決められた領域から外れている前記関心地点までの道順を示す表示を含む、決められた領域の写実的な概略図を生成するステップと、
c)ステップb)において生成された前記写実的な概略図を出力するステップとを備える
方法。 - 請求項77に記載の方法において、
前記写実的な概略図は、前記決められた地理的領域から外れている前記関心地点までの距離の表示を含む
方法。 - 上記いずれかの請求項に記載の方法において、
前記写実的な概略図は、第1の情報源からの第1のソースデータと第2の情報源からの第2のソースデータを含む
方法。 - 写実的な概略図を提供する方法であって、
a)第1の情報源から第1のソースデータを取得するステップと、
b)第2の情報源から第2のソースデータを取得するステップと、
c)前記第1のソースデータと前記第2のソースデータを含む写実的な概略図を生成するステップと、
d)ステップc)において生成された前記写実的な概略図を出力するステップとを備える
方法。 - 請求項79又は80に記載の方法において、
a)第1の情報源において第1の地物を識別するステップと、
b)第2の情報源において第2の地物を識別するステップと、
c)前記第2の地物が前記第1の地物と重なるかどうかを測定するステップと、
d)前記第2の地物が前記第1の地物と重なる場合、前記第2の地物と前記第1の地物を関連付けるステップとを備える
方法。 - 上記いずれかの請求項に記載の方法において、
前記データや概略図は、中央サーバ(central server)によって生成され、処理され、そして/又は、出力され、
携帯端末装置において、前記データや概略図を受信し、表示する
方法。 - 請求項1から82いずれか1項に記載の方法を実現するシステムであって、
概略図を生成し、携帯端末装置に対し出力する中央サーバと、前記概略図を受信し、表示する顧客の携帯端末装置とを具備する
システム。 - 請求項1から82いずれか1項に記載の方法によって、データや概略図を受信あるいは、表示する顧客の携帯端末装置。
- ノードと前記ノードに接続されたエッジの表示データを含むデータベースを使用して、地理的交通網を表示するデータを生成する装置であって、
前記ノードと前記エッジは地理的交通網を表現し、
(a)少なくとも1つの前記ノードと少なくとも1つの前記エッジを含む拡張交差地点に関連するデータベースからデータを抽出する手段と、
(b)前記抽出データを出力する手段とを備える
装置。 - エッジを介して接続されたノードから形成された地理的交通網の表示データを処理する装置であって、
エッジを抽出する手段と、
前記エッジが人工物であるかどうかを判定するために前記抽出されたエッジの付近の前記交通網の一部を分析する手段と、
前記分析の結果に従って抽出した前記エッジを処理する手段とを備える
装置。 - 地理的交通網の表示データを処理する装置であって、
a)データベースから前記データを検索する手段と、
b)修正アルゴリズムに基づき前記データを処理する手段と、
c)前記処理データを出力する手段とを備える
装置。 - 場所の写実的な概略図を提供する装置であって、
a)規定された抽出アルゴリズムに基づいてデータベースから1つ以上の関心地点を抽出する手段と、
b)関心地点を含む写実的な概略図を生成する手段と、
c)生成された写実的な概略図を出力する手段とを備える
装置。 - 場所の写実的な概略図を提供する装置であって、
a)道順を計算する手段と、
b)前記計算された道順の表示を示す情報を含む写実的な概略図を生成する手段と、
c)前記写実的な概略図を出力する手段とを備える
装置。 - 場所の写実的な概略図を提供する装置であって、
a)月や太陽の現在位置を決定する手段と、
b)決定した月や太陽の前記現在位置を示す情報を含む、前記場所の写実的な外略図を生成する手段と、
c)前記概略図を出力する手段とを備える
装置。 - 写実的な概略図を提供する装置であって、
a)配置(configuration)データを受信する手段と、
b)ステップa)において受信した前記配置データに基づいて写実的な概略図を生成する手段と、
c)ステップb)において生成した写実的な概略図を出力する手段とを備える
装置。 - 場所の写実的な概略図を提供する装置であって、
a)データベースから交通網要素を抽出する手段と、
b)規定された抽出アルゴリズムに基づいて、データベースから関心地点を抽出するステップと、
c)ステップa)において抽出された前記交通網要素と、ステップb)において抽出された前記関心地点との間の地理的関係を測定するステップと、
d)ステップc)において測定された前記地理的関係に基づいて、前記関心地点の抽象的表示を生成するステップと、
e)ステップa)において抽出された交通網要素のセットと、ステップd)において生成された前記関心地点の抽象的表示とを含む写実的な概略図を生成するステップと、
f)前記写実的な概略図を出力するステップとを更に備える
方法。 - 決められた地理的領域によって囲まれた場所の写実的な概略図を提供する装置であって、
a)データベースから前記決められた領域から外れている1つ以上の関心地点を抽出する手段と、
b)前記決められた領域から外れている前記関心地点までの道順を示す表示を含む、決められた領域の写実的な概略図を生成する手段と、
c)ステップb)において生成された前記写実的な概略図を出力する手段とを備える
装置。 - 写実的な概略図を提供する装置であって、
a)第1の情報源から第1のソースデータを取得する手段と、
b)第2の情報源から第2のソースデータを取得する手段と、
c)前記第1のソースデータと前記第2のソースデータを含む写実的な概略図を生成する手段と、
d)ステップc)において生成された前記写実的な概略図を出力する手段とを備える
装置。 - 請求項85から94いずれか1項に記載の装置において、
携帯端末装置を備える
装置。 - 請求項95に記載の装置において、
無線交通網を介して前記携帯端末装置に接続されたサーバを更に備える
装置。 - 請求項1から82いずれか1項に記載の方法を実行するように用いられる
携帯端末装置。 - 複数の携帯端末装置と通信する手段を含み、請求項1から82いずれか1項に記載の方法を実行するように用いられる
中央サーバ(central server) - 請求項85から94いずれか1項に記載の装置と、
携帯端末装置とを備える
システム。 - 請求項1から82いずれか1項に記載の方法を実行させるための
コンピュータプログラム。 - 請求項100に記載のコンピュータプログラムを記録した読取り容易な
記録媒体。 - 請求項100に記載のコンピュータプログラムを明白に実行する
信号。 - 請求項102に記載の信号を転送する方法。
- 図1から図30Bのいずれかを参照し、この中で詳述される方法。
- 図1から図3、図18a、図18b、及び図18cのいずれかを参照し、この中で詳述される装置。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0201517A GB0201517D0 (en) | 2002-01-23 | 2002-01-23 | Method of providing a graphical schematic of a location determining the location of a device and searching a database |
| GB0227466A GB0227466D0 (en) | 2002-01-23 | 2002-11-25 | Schematic generation |
| GB0227467A GB0227467D0 (en) | 2002-01-23 | 2002-11-25 | Routing framework |
| PCT/GB2003/000297 WO2003062749A2 (en) | 2002-01-23 | 2003-01-23 | Schematic generation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005515513A true JP2005515513A (ja) | 2005-05-26 |
| JP2005515513A5 JP2005515513A5 (ja) | 2006-03-09 |
Family
ID=27617144
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003562571A Pending JP2005515513A (ja) | 2002-01-23 | 2003-01-23 | 概略図の生成 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7440875B2 (ja) |
| EP (1) | EP1478904A2 (ja) |
| JP (1) | JP2005515513A (ja) |
| AU (2) | AU2003205831A1 (ja) |
| WO (2) | WO2003062749A2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008241314A (ja) * | 2007-03-26 | 2008-10-09 | Victor Co Of Japan Ltd | 経路誘導装置及び経路誘導方法 |
| WO2008149537A1 (ja) * | 2007-05-31 | 2008-12-11 | Panasonic Corporation | 画像撮影装置、付加情報提供サーバ及び付加情報フィルタリングシステム |
| JP2009109643A (ja) * | 2007-10-29 | 2009-05-21 | Mitsubishi Electric Corp | デフォルメ地図生成装置 |
| JP2009145100A (ja) * | 2007-12-12 | 2009-07-02 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2010128084A (ja) * | 2008-11-26 | 2010-06-10 | Mitsubishi Electric Corp | デフォルメ地図生成装置 |
| JP2012185168A (ja) * | 2012-04-20 | 2012-09-27 | Pioneer Electronic Corp | 広告情報提供装置及び広告情報提供方法 |
| KR101815511B1 (ko) * | 2016-12-29 | 2018-01-30 | (주) 아인스에스엔씨 | 교통 시뮬레이션을 위한 프레임워크 및 이를 이용한 시뮬레이션방법 |
| KR20210106893A (ko) * | 2020-02-21 | 2021-08-31 | 네이버 주식회사 | 도식적 맵을 생성하기 위한 방법 및 시스템 |
| WO2022123691A1 (ja) * | 2020-12-09 | 2022-06-16 | 日本電信電話株式会社 | データ格納装置、データ格納方法、および、データ格納プログラム |
Families Citing this family (75)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050021223A1 (en) * | 2003-04-15 | 2005-01-27 | United Parcel Service Of America, Inc. | Rush hour modeling for routing and scheduling |
| US7373244B2 (en) * | 2004-04-20 | 2008-05-13 | Keith Kreft | Information mapping approaches |
| KR100697098B1 (ko) * | 2004-06-30 | 2007-03-20 | 에스케이 주식회사 | 안내점 지도를 이용한 텔레매틱스 서비스 제공 시스템 및그 방법 |
| US7873911B2 (en) * | 2004-08-31 | 2011-01-18 | Gopalakrishnan Kumar C | Methods for providing information services related to visual imagery |
| EP1810182A4 (en) * | 2004-08-31 | 2010-07-07 | Kumar Gopalakrishnan | METHOD AND SYSTEM FOR PROVIDING INFORMATION SERVICES RELEVANT TO VISUAL IMAGE |
| US8370323B2 (en) * | 2004-08-31 | 2013-02-05 | Intel Corporation | Providing information services related to multimodal inputs |
| US20070005490A1 (en) * | 2004-08-31 | 2007-01-04 | Gopalakrishnan Kumar C | Methods and System for Distributed E-commerce |
| US7480567B2 (en) * | 2004-09-24 | 2009-01-20 | Nokia Corporation | Displaying a map having a close known location |
| US7610560B2 (en) | 2004-11-16 | 2009-10-27 | Microsoft Corporation | Methods for automated and semiautomated composition of visual sequences, flows, and flyovers based on content and context |
| JP4613075B2 (ja) * | 2005-02-16 | 2011-01-12 | クラリオン株式会社 | 地図処理装置、ナビゲーション装置及び地図表示方法 |
| DE102005009105A1 (de) * | 2005-02-28 | 2006-09-07 | Siemens Ag | Verfahren und Verwalten einer Anzeigeeinrichtung |
| US7508400B2 (en) * | 2005-03-23 | 2009-03-24 | Zenrin Co., Ltd. | Digital map data processing system |
| DE102005020151A1 (de) * | 2005-04-29 | 2006-11-02 | Volkswagen Ag | Verfahren zum Steuern einer Anzeigevorrichtung in einem Kraftfahrzeug und Anzeigevorrichtung |
| CA2605879C (en) * | 2005-05-09 | 2012-07-17 | United Parcel Service Of America, Inc. | Systems and methods for routing and scheduling |
| US7831381B2 (en) * | 2005-08-04 | 2010-11-09 | Microsoft Corporation | Data engine for ranking popularity of landmarks in a geographical area |
| US7634354B2 (en) * | 2005-08-31 | 2009-12-15 | Microsoft Corporation | Location signposting and orientation |
| US8731585B2 (en) * | 2006-02-10 | 2014-05-20 | Telecommunications Systems, Inc. | Intelligent reverse geocoding |
| US20070078596A1 (en) * | 2005-09-30 | 2007-04-05 | John Grace | Landmark enhanced directions |
| JP4859447B2 (ja) | 2005-11-28 | 2012-01-25 | 富士通株式会社 | ナビゲーション装置 |
| US20070229538A1 (en) * | 2006-03-31 | 2007-10-04 | Research In Motion Limited | Methods and apparatus for dynamically labeling map objects in visually displayed maps of mobile communication devices |
| US8793066B2 (en) | 2006-06-27 | 2014-07-29 | Microsoft Corporation | Route monetization |
| NZ549547A (en) * | 2006-08-31 | 2008-12-24 | Trekwizard Ltd | Methods and apparatus of grading a route and calculating travel time information for the route |
| WO2008075492A1 (ja) * | 2006-12-19 | 2008-06-26 | Mitsubishi Electric Corporation | 地図表示装置 |
| WO2008083978A1 (en) * | 2007-01-10 | 2008-07-17 | Tomtom International B.V. | Improved navigation device and method |
| KR100875374B1 (ko) * | 2007-03-07 | 2008-12-23 | 팅크웨어(주) | 트리 구조의 명칭 검색 방법 및 그 시스템 |
| DE102007028761A1 (de) * | 2007-06-22 | 2008-12-24 | Audi Ag | Verfahren zum situationsabhängigen Anzeigen eines einem Point-of-Interest zugeordenten Symbols mittels einer Anzeigeeinrichtung eines Navigationssystems und Navigationssystem |
| US7801675B2 (en) * | 2007-07-13 | 2010-09-21 | Dash Navigation, Inc. | System and method of identifying portions of roads |
| US10147099B2 (en) * | 2007-07-25 | 2018-12-04 | Yellowpages.Com Llc | Systems and methods to dynamically generate listings to selectively track user responses |
| US8473198B2 (en) | 2007-12-14 | 2013-06-25 | Microsoft Corporation | Additional content based on intended travel destination |
| US8090532B2 (en) | 2007-12-14 | 2012-01-03 | Microsoft Corporation | Pedestrian route production |
| US8428859B2 (en) | 2007-12-14 | 2013-04-23 | Microsoft Corporation | Federated route production |
| US8793065B2 (en) | 2008-02-19 | 2014-07-29 | Microsoft Corporation | Route-based activity planner |
| EP2255215A1 (fr) * | 2008-02-20 | 2010-12-01 | France Telecom | Localisation d'un objet |
| US7917877B2 (en) * | 2008-05-09 | 2011-03-29 | Cadence Design Systems, Inc. | System and method for circuit schematic generation |
| US9739634B2 (en) * | 2008-09-30 | 2017-08-22 | Verizon Patent And Licensing Inc. | Multicomputer data transferring for transferring data between multiple computers that use the data after the transfer |
| US8581900B2 (en) * | 2009-06-10 | 2013-11-12 | Microsoft Corporation | Computing transitions between captured driving runs |
| US8725407B2 (en) * | 2009-11-09 | 2014-05-13 | United Parcel Service Of America, Inc. | Enhanced location information for points of interest |
| US20110153193A1 (en) * | 2009-12-22 | 2011-06-23 | General Electric Company | Navigation systems and methods for users having different physical classifications |
| US8781990B1 (en) * | 2010-02-25 | 2014-07-15 | Google Inc. | Crowdsensus: deriving consensus information from statements made by a crowd of users |
| US9389095B2 (en) * | 2010-03-23 | 2016-07-12 | Telenav, Inc. | Navigation system with point of interest ranking mechanism and method of operation thereof |
| US20150117796A1 (en) * | 2011-03-28 | 2015-04-30 | Google Inc. | Method and system for prioritizing points of interest for display in a map |
| US8533146B1 (en) | 2011-04-29 | 2013-09-10 | Google Inc. | Identification of over-clustered map features |
| US8700580B1 (en) | 2011-04-29 | 2014-04-15 | Google Inc. | Moderation of user-generated content |
| US8862492B1 (en) | 2011-04-29 | 2014-10-14 | Google Inc. | Identifying unreliable contributors of user-generated content |
| US8694603B2 (en) | 2011-06-20 | 2014-04-08 | International Business Machines Corporation | Geospatial visualization performance improvement for contiguous polylines with similar dynamic characteristics |
| US20130007089A1 (en) * | 2011-06-29 | 2013-01-03 | O'donnell Cornelius J | Distributing points of interest |
| GB2492381A (en) * | 2011-06-30 | 2013-01-02 | Tomtom Int Bv | Controlling a map displayed on a navigation apparatus in order to maximise the display of a remaining route |
| US20130262479A1 (en) * | 2011-10-08 | 2013-10-03 | Alohar Mobile Inc. | Points of interest (poi) ranking based on mobile user related data |
| US8832116B1 (en) | 2012-01-11 | 2014-09-09 | Google Inc. | Using mobile application logs to measure and maintain accuracy of business information |
| US20130227113A1 (en) * | 2012-02-26 | 2013-08-29 | International Business Machines Corporation | Managing virtualized networks based on node relationships |
| US9146125B2 (en) | 2012-06-05 | 2015-09-29 | Apple Inc. | Navigation application with adaptive display of graphical directional indicators |
| US9482296B2 (en) | 2012-06-05 | 2016-11-01 | Apple Inc. | Rendering road signs during navigation |
| US9997069B2 (en) | 2012-06-05 | 2018-06-12 | Apple Inc. | Context-aware voice guidance |
| US9886794B2 (en) | 2012-06-05 | 2018-02-06 | Apple Inc. | Problem reporting in maps |
| US20130321400A1 (en) * | 2012-06-05 | 2013-12-05 | Apple Inc. | 3D Map Views for 3D Maps |
| US10176633B2 (en) | 2012-06-05 | 2019-01-08 | Apple Inc. | Integrated mapping and navigation application |
| US9418672B2 (en) | 2012-06-05 | 2016-08-16 | Apple Inc. | Navigation application with adaptive instruction text |
| US8965696B2 (en) | 2012-06-05 | 2015-02-24 | Apple Inc. | Providing navigation instructions while operating navigation application in background |
| US9230556B2 (en) | 2012-06-05 | 2016-01-05 | Apple Inc. | Voice instructions during navigation |
| US20130328861A1 (en) | 2012-06-06 | 2013-12-12 | Apple Inc. | Generation of Road Data |
| US9207094B2 (en) | 2012-06-10 | 2015-12-08 | Apple Inc. | Road height generation for a road network |
| US9208601B2 (en) * | 2012-06-10 | 2015-12-08 | Apple Inc. | Computing plausible road surfaces in 3D from 2D geometry |
| US9298358B1 (en) * | 2012-08-21 | 2016-03-29 | Google Inc. | Scrollable notifications |
| US9194715B2 (en) * | 2012-10-14 | 2015-11-24 | Mitac International Corp. | System and related method for offering navigation guidance |
| US9122702B2 (en) * | 2012-10-16 | 2015-09-01 | Nokia Technologies Oy | Method and apparatus for providing location trajectory compression based on map structure |
| US9449110B2 (en) * | 2013-01-31 | 2016-09-20 | Microsoft Technology Licensing, Llc | Geotiles for finding relevant results from a geographically distributed set |
| CN103198151B (zh) * | 2013-04-24 | 2016-05-11 | 北京航空航天大学 | 区域性城市公交车辆运行信息的索引查询系统及方法 |
| JP6282174B2 (ja) * | 2014-05-24 | 2018-02-21 | インターナショナル・ビジネス・マシーンズ・コーポレーションInternational Business Machines Corporation | テキストを用いたルート案内方法 |
| CN109071015B (zh) | 2016-04-29 | 2021-11-30 | 美国联合包裹服务公司 | 无人机拾取及递送系统 |
| US10730626B2 (en) | 2016-04-29 | 2020-08-04 | United Parcel Service Of America, Inc. | Methods of photo matching and photo confirmation for parcel pickup and delivery |
| US10775792B2 (en) | 2017-06-13 | 2020-09-15 | United Parcel Service Of America, Inc. | Autonomously delivering items to corresponding delivery locations proximate a delivery route |
| US11164036B2 (en) * | 2018-08-30 | 2021-11-02 | The Government Of The United States Of America, As Represented By The Secretary Of The Navy | Human-assisted machine learning through geometric manipulation and refinement |
| US20200209010A1 (en) * | 2018-12-26 | 2020-07-02 | Here Global B.V. | Method and apparatus for rendering a parking search route |
| US11781875B2 (en) * | 2019-08-21 | 2023-10-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Apparatus and method for forming and analyzing connected roads |
| US11473924B2 (en) * | 2020-02-28 | 2022-10-18 | Lyft, Inc. | Transition of navigation modes for multi-modal transportation |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4253150A (en) | 1978-09-29 | 1981-02-24 | Scovill Royal J | Pictorial navigation computer |
| GB2119140A (en) | 1982-04-02 | 1983-11-09 | Mcmichael Ltd | Map display systems |
| US4558302A (en) | 1983-06-20 | 1985-12-10 | Sperry Corporation | High speed data compression and decompression apparatus and method |
| GB2258062A (en) | 1991-07-20 | 1993-01-27 | Frank Guinard | Updating marine charts |
| GB2275120A (en) | 1993-02-03 | 1994-08-17 | Medi Mark Limited | Personal Organiser with Map feature. |
| US5790946A (en) * | 1993-07-15 | 1998-08-04 | Rotzoll; Robert R. | Wake up device for a communications system |
| US6580904B2 (en) | 1994-04-28 | 2003-06-17 | Metro One Telecommunications, Inc. | Method of providing directional assistance to a mobile telephone subscriber |
| MY125706A (en) | 1994-08-19 | 2006-08-30 | Thomson Consumer Electronics | High speed signal processing smart card |
| GB9417600D0 (en) | 1994-09-01 | 1994-10-19 | British Telecomm | Navigation information system |
| JP2910674B2 (ja) | 1996-05-28 | 1999-06-23 | 日本電気株式会社 | 音声による携帯電話のナビゲーションシステム |
| FR2761837B1 (fr) | 1997-04-08 | 1999-06-11 | Sophie Sommelet | Dispositif d'aide a la navigation ayant une architecture distribuee basee sur internet |
| US20030221118A1 (en) * | 1998-01-15 | 2003-11-27 | Kline & Walker, Llc | Automated accounting system that values, controls, records and bills the uses of equipment/vehicles for society |
| GB2336673B (en) | 1998-04-23 | 2002-04-03 | Yeoman Group Plc | Referencing maps with respect to digitising apparatuses |
| AU5220199A (en) | 1998-07-20 | 2000-02-07 | Signalsoft Corp. | Subscriber delivered location-based services |
| DE19836485A1 (de) | 1998-08-12 | 2000-02-17 | Bosch Gmbh Robert | Verfahren zum Bestimmen einer Route von einem Ausgangspunkt zu einem Zielpunkt auf einem Routennetz |
| US6321092B1 (en) | 1998-11-03 | 2001-11-20 | Signal Soft Corporation | Multiple input data management for wireless location-based applications |
| US6208934B1 (en) | 1999-01-19 | 2001-03-27 | Navigation Technologies Corp. | Method and system for providing walking instructions with route guidance in a navigation program |
| US6212392B1 (en) | 1999-02-26 | 2001-04-03 | Signal Soft Corp. | Method for determining if the location of a wireless communication device is within a specified area |
| JP3773705B2 (ja) | 1999-06-18 | 2006-05-10 | 株式会社エヌ・ティ・ティ・ドコモ | 地図情報システム及び地図配信方法 |
| JP2001004393A (ja) | 1999-06-18 | 2001-01-12 | Ntt Docomo Inc | 地図生成装置、地図表示システム、及び地図生成プログラムを記録した記録媒体 |
| WO2001026393A1 (en) | 1999-10-01 | 2001-04-12 | Signalsoft Corp. | Location based auctioning services for wireless networks |
| WO2001027812A2 (en) | 1999-10-12 | 2001-04-19 | Autodesk, Inc. | Geographic maps on a personal digital assistant (pda) and server |
| AU1584801A (en) | 1999-11-05 | 2001-05-14 | Signalsoft Corp. | Spatial toolkits for wireless location based services |
| US20010041561A1 (en) | 2000-01-14 | 2001-11-15 | Thomas Ventulett | System and method for location-based stimuli motivated information delivery |
| US6314365B1 (en) | 2000-01-18 | 2001-11-06 | Navigation Technologies Corp. | Method and system of providing navigation services to cellular phone devices from a server |
| US6424933B1 (en) | 2000-03-17 | 2002-07-23 | Vicinity Corporation | System and method for non-uniform scaled mapping |
| EP1266282B1 (en) | 2000-03-17 | 2010-04-21 | Microsoft Corporation | System and method for non-uniform scaled mapping |
| GB2360588B (en) | 2000-03-23 | 2004-04-07 | Yeoman Group Plc | Navigation system |
| US6353797B1 (en) | 2000-06-01 | 2002-03-05 | Airflash | Database minimizing by wireless input of location related information |
| US6915204B1 (en) | 2000-06-01 | 2005-07-05 | Webraska, Inc. | Method, system, and article of manufacture for minimizing travel time to a user selected location |
| DE10030805A1 (de) | 2000-06-29 | 2002-01-10 | Nokia Mobile Phones Ltd | Verfahren und Mobilstation zur Wegführung |
| US20020107029A1 (en) | 2001-02-05 | 2002-08-08 | Caughran Jack Ray | Method and apparatus for obtaining location zone data for a mobile subscriber unit |
-
2003
- 2003-01-23 EP EP03702708A patent/EP1478904A2/en not_active Withdrawn
- 2003-01-23 WO PCT/GB2003/000297 patent/WO2003062749A2/en active Application Filing
- 2003-01-23 WO PCT/GB2003/000300 patent/WO2003063521A2/en not_active Application Discontinuation
- 2003-01-23 AU AU2003205831A patent/AU2003205831A1/en not_active Abandoned
- 2003-01-23 US US10/502,276 patent/US7440875B2/en not_active Expired - Fee Related
- 2003-01-23 JP JP2003562571A patent/JP2005515513A/ja active Pending
- 2003-01-23 AU AU2003202073A patent/AU2003202073A1/en not_active Abandoned
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008241314A (ja) * | 2007-03-26 | 2008-10-09 | Victor Co Of Japan Ltd | 経路誘導装置及び経路誘導方法 |
| WO2008149537A1 (ja) * | 2007-05-31 | 2008-12-11 | Panasonic Corporation | 画像撮影装置、付加情報提供サーバ及び付加情報フィルタリングシステム |
| US8264584B2 (en) | 2007-05-31 | 2012-09-11 | Panasonic Corporation | Image capturing apparatus, additional information providing server, and additional information filtering system |
| JP2009109643A (ja) * | 2007-10-29 | 2009-05-21 | Mitsubishi Electric Corp | デフォルメ地図生成装置 |
| JP2009145100A (ja) * | 2007-12-12 | 2009-07-02 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2010128084A (ja) * | 2008-11-26 | 2010-06-10 | Mitsubishi Electric Corp | デフォルメ地図生成装置 |
| JP2012185168A (ja) * | 2012-04-20 | 2012-09-27 | Pioneer Electronic Corp | 広告情報提供装置及び広告情報提供方法 |
| KR101815511B1 (ko) * | 2016-12-29 | 2018-01-30 | (주) 아인스에스엔씨 | 교통 시뮬레이션을 위한 프레임워크 및 이를 이용한 시뮬레이션방법 |
| KR20210106893A (ko) * | 2020-02-21 | 2021-08-31 | 네이버 주식회사 | 도식적 맵을 생성하기 위한 방법 및 시스템 |
| KR102525605B1 (ko) | 2020-02-21 | 2023-04-25 | 네이버 주식회사 | 도식적 맵을 생성하기 위한 방법 및 시스템 |
| WO2022123691A1 (ja) * | 2020-12-09 | 2022-06-16 | 日本電信電話株式会社 | データ格納装置、データ格納方法、および、データ格納プログラム |
| JP7468702B2 (ja) | 2020-12-09 | 2024-04-16 | 日本電信電話株式会社 | データ格納装置、データ格納方法、および、データ格納プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2003062749A2 (en) | 2003-07-31 |
| WO2003063521A8 (en) | 2003-11-20 |
| AU2003205831A1 (en) | 2003-09-02 |
| US20050107993A1 (en) | 2005-05-19 |
| WO2003063521A2 (en) | 2003-07-31 |
| US7440875B2 (en) | 2008-10-21 |
| EP1478904A2 (en) | 2004-11-24 |
| AU2003202073A1 (en) | 2003-09-02 |
| WO2003062749A8 (en) | 2003-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005515513A (ja) | 概略図の生成 | |
| US10309797B2 (en) | User interface for displaying navigation information in a small display | |
| US9146126B2 (en) | Interactive geographic feature | |
| CN109478184B (zh) | 识别、处理和显示数据点聚类 | |
| US6487305B2 (en) | Deformed map automatic generation system including automatic extraction of road area from a block map and shape deformation of at least one road area drawn in the map | |
| JP3793032B2 (ja) | 道案内方法及び装置 | |
| US20130018579A1 (en) | Pictorial navigation | |
| JP6601947B2 (ja) | ナビゲーションシステム、ナビゲーション方法及びプログラム | |
| JP2004347420A (ja) | カーナビゲーション装置 | |
| US9250075B2 (en) | Generating travel time data | |
| US10030982B2 (en) | Generalising topographical map data | |
| JP4781685B2 (ja) | 略地図生成装置 | |
| US20210270629A1 (en) | Method and apparatus for selecting a path to a destination | |
| CN107202587B (zh) | 规划出行路线的方法和装置 | |
| CN114580796B (zh) | 一种旅游属性路径规划方法及系统 | |
| KR102156809B1 (ko) | 위치 표현 방법 및 시스템 | |
| Chandrasekara et al. | Landmarks based route planning and linear path generation for mobile navigation applications | |
| KR20200138056A (ko) | 출발지에 독립적인 액세스 맵 생성을 위한 시스템 및 방법 | |
| Cooley et al. | Package ‘googleway’ | |
| KR102367425B1 (ko) | 기상에 따른 도로구간 위험도의 지도 표출 방법, 이를 수행하는 지도 서비스 시스템, 및 이에 사용되는 웹서버 | |
| Chowaw-Liebman et al. | Evaluation of an indoor navigation approach based on approximate positions | |
| Chernykh et al. | Development of a Navigation System on the University Territory Using Augmented Reality Technology | |
| Ziegler et al. | COPERNICUS: Context‐Preserving Engine for Route Navigation with Interactive User‐modifiable Scaling | |
| Mahaulpatha et al. | Landmark Based Path Planning And Linear Path Generation For Mobile Map Applications | |
| KR20200069113A (ko) | 위치 표현 방법 및 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090106 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090619 |