JP2005502174A - イオン注入器を調整する方法および装置 - Google Patents
イオン注入器を調整する方法および装置 Download PDFInfo
- Publication number
- JP2005502174A JP2005502174A JP2003525879A JP2003525879A JP2005502174A JP 2005502174 A JP2005502174 A JP 2005502174A JP 2003525879 A JP2003525879 A JP 2003525879A JP 2003525879 A JP2003525879 A JP 2003525879A JP 2005502174 A JP2005502174 A JP 2005502174A
- Authority
- JP
- Japan
- Prior art keywords
- target
- beam current
- parameter
- adjustment
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 188
- 239000002245 particle Substances 0.000 claims abstract description 81
- 238000005259 measurement Methods 0.000 claims abstract description 26
- 238000011156 evaluation Methods 0.000 claims abstract description 8
- 238000000926 separation method Methods 0.000 claims description 43
- 230000004044 response Effects 0.000 claims description 42
- 230000008859 change Effects 0.000 claims description 35
- 230000005684 electric field Effects 0.000 claims description 5
- 230000007704 transition Effects 0.000 claims description 5
- 238000004458 analytical method Methods 0.000 claims description 4
- 230000000737 periodic effect Effects 0.000 claims description 4
- 238000005452 bending Methods 0.000 claims 1
- 230000000977 initiatory effect Effects 0.000 claims 1
- 230000000694 effects Effects 0.000 abstract description 11
- 238000012544 monitoring process Methods 0.000 abstract description 7
- 108091027981 Response element Proteins 0.000 abstract description 5
- 230000033228 biological regulation Effects 0.000 abstract description 2
- 150000002500 ions Chemical class 0.000 description 84
- 238000010884 ion-beam technique Methods 0.000 description 63
- 230000008569 process Effects 0.000 description 53
- 230000006870 function Effects 0.000 description 34
- 238000000605 extraction Methods 0.000 description 26
- 235000012431 wafers Nutrition 0.000 description 23
- 238000013459 approach Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 13
- 238000005468 ion implantation Methods 0.000 description 11
- 239000004065 semiconductor Substances 0.000 description 8
- 238000003384 imaging method Methods 0.000 description 7
- 230000000875 corresponding effect Effects 0.000 description 6
- 238000007405 data analysis Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 230000003750 conditioning effect Effects 0.000 description 5
- 239000000523 sample Substances 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 239000007943 implant Substances 0.000 description 4
- 238000013480 data collection Methods 0.000 description 3
- 239000012535 impurity Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000010363 phase shift Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000002513 implantation Methods 0.000 description 2
- 238000012804 iterative process Methods 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 230000000153 supplemental effect Effects 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000004308 accommodation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000001351 cycling effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000004949 mass spectrometry Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/244—Detectors; Associated components or circuits therefor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/26—Bombardment with radiation
- H01L21/263—Bombardment with radiation with high-energy radiation
- H01L21/265—Bombardment with radiation with high-energy radiation producing ion implantation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/304—Controlling tubes by information coming from the objects or from the beam, e.g. correction signals
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/317—Electron-beam or ion-beam tubes for localised treatment of objects for changing properties of the objects or for applying thin layers thereon, e.g. for ion implantation
- H01J37/3171—Electron-beam or ion-beam tubes for localised treatment of objects for changing properties of the objects or for applying thin layers thereon, e.g. for ion implantation for ion implantation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/245—Detection characterised by the variable being measured
- H01J2237/24507—Intensity, dose or other characteristics of particle beams or electromagnetic radiation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/31701—Ion implantation
- H01J2237/31703—Dosimetry
Landscapes
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Toxicology (AREA)
- Health & Medical Sciences (AREA)
- Electron Sources, Ion Sources (AREA)
Abstract
Description
【0001】
本発明は、荷電粒子ビームシステムに関し、特に、イオン注入器に限定はされないがこれを含む荷電粒子ビームシステムを調整する方法および装置に関する。
【背景技術】
【0002】
イオン注入は、半導体ウエアに電気伝導性を変える不純物を導入する標準的な技術である。従来技術のイオン注入では、所望の不純物がイオン源でイオン化され、イオンは所期のエネルギーをもつイオンビームを形成するために加速され、イオンビームはウエハの表面に向けられる。イオンビーム中のエネルギーをもつイオンは半導体材料のバルク内に侵入し、半導体材料の結晶格子内に埋め込まれ、所望の伝導性の領域を形成する。
【特許文献1】
国際公開第02/23586号パンフレット
【0003】
イオン注入に関連した半導体製造プロセスには、ウエハに注入される累積的なイオンドーズ量、注入の深さ、ウエハの表面にわたるドーズ量の一様性、表面のダメージ、および不所望の汚染に関連して、厳格な条件が課せられる。注入されたドーズ量および深さは、注入された領域の電気的な活性を決定するとともに、半導体ウエハ上のすべてのデバイスが特定の制限内で、動作特性をもつことを確実にするために、ドーズ量の一様性が要求される。
【0004】
半導体ウエハ上にデバイスを形成するために、しばしば不純物を異なる深さに注入する必要がある。ビーム中のイオンのエネルギーは、イオンが半導体の格子に留まる前に、半導体ウエハの内で進行する深さを決定するものである。特定のデバイスのためのレシピは、異なる種類、異なるエネルギーおよび異なるドーズ量を使用して、いくつかのイオン注入を行う工程を必要としている。イオンビームのひとつ以上のパラメータが変化するごとに、たとえばイオンビームのエネルギーが変化すると、ビームを運ぶこと、ウエハに移送することを最適にするために、イオン注入器を調整することが必要となる。
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来技術のイオン注入器を調整することは、比較的時間を消費するプロセスである。最初に、イオン注入器の動作を制御するコンピュータが、新しいビームのプロファイルと関連した一般的な調整パラメータを取り出し、これらパラメータをイオン注入器に適用するために、プログラムされる。イオン注入器の種々の要素に、特定のビームレシピに対して近似的な値に関する一般的な調整パラメータが与えられると、操作者は調整プロセスを完了するために設定を最適化する。イオン注入器がウエハにイオンを注入するために使用できるように、ビームを受け入れ可能なレベルに手動で調整するには、経験のある操作者でも50分から30分の時間を要する。大きな磁気要素のような、イオン注入器のひとつ以上の要素が比較的長い安定時間をもつこともあり、また履歴を示すこともあるという事実から、このような比較的長い調整時間が少なくとも必要となる。自動調整(autotune)技術が利用されてきた。しかし、従来技術の自動調整技術は、手動調整技術よりも遅い。従前のイオン注入器の調整は、したがって、時間を浪費する。イオン注入器が、調整されるまで、ウエハにイオンを注入するための使用ができないことから、調整プロセスはイオン注入のスループットの増加を妨げている。
【0006】
さらに、従前の調整手順は、磁石により形成される磁場の強度の正確な知識を必要とする。高感度のガウスプローブを従前のイオン注入の調整プロセスに使用することができるが、残念なことに、高感度のガウスプローブは典型的には、何万ドルと非常に高価なものである。したがって、これらガウスプローブの使用に代え、安価な低感度のガウスプローブを使用できることが望ましい。
【0007】
このように、イオン注入に限定はされないが、これを含む荷電粒子ビームシステムを調整する改良された方法および装置について需要がある。
【課題を解決するための手段】
【0008】
本発明は、荷電粒子ビームシステムのひとつ以上の要素を自動的に調整する方法および装置を提供し、これによりシステムの調整時間を減少させ、調整プロセスにおいて少なくとも部分的に熟練者を必要することがなくなり、上記欠点を解消する。
【0009】
本発明の第一の態様にしたがって、本方法は、荷電粒子ビームシステム(荷電粒子がターゲット要素へと運ばれる)のターゲット要素のターゲットパラメータの調整を評価する。本方法は、(a)ターゲット要素(制御パラメータがターゲット要素と所定の関係を有する)の上流に位置する制御要素の制御パラメータを変える工程、(b)制御パラメータが変わったときにターゲット要素の下流のビーム電流を測定する工程、ならびに(c)ビーム電流の測定に基づいてターゲットパラメータの調整およびターゲット要素と制御パラメータとの間の所定の関係を評価する工程を含む。評価された調整が所定の基準を満たさないときは、ターゲットパラメータは調節される。好適実施例では、荷電粒子ビームシステムはイオン注入器からなる。
【0010】
ターゲット要素は、磁石電流に応答して磁場を形成する磁石を含む。ターゲット要素を調節する工程は磁石電流を調節することを含み得る。制御要素は、制御電圧に応答して電場を形成する静電要素を含み得る。制御要素は、荷電粒子ビームのエネルギーを変化させてもよく、またターゲットへの荷電粒子ビームの入力角度を変化させてもよい。制御パラメータを変化させる工程は、制御電圧を変化させることを含み得る。ターゲット要素は典型的に、応答が遅い要素である。
【0011】
ターゲットパラメータの調整を評価する工程は、ターゲットパラメータの調節を決定するために、ビーム電流測定を分析することを含み得る。ターゲットパラメータは、決定したターゲットパラメータ調節により調節してもよい。ビーム電流測定を分析する工程は、制御パラメータの必要な値へと、ピークビーム電流をシフトするために、ターゲットパラメータの調節方向および大きさを決定することを含み得る。
【0012】
本方法はさらに、測定ビーム電流が所定の基準を満たすまで、ターゲットパラメータの調節が続く、工程(a)、(b)および(c)の一回以上の繰り返しを実行する工程を含み得る。
【0013】
本発明の他の態様にしたがって、荷電粒子ビームシステム(荷電粒子ビームがターゲット要素に運ばれる)のターゲット要素のターゲットパラメータを調整する方法が提供される。本方法は、(a)公称ターゲットパラメータ値(ターゲットパラメータはターゲット要素に与えられた電源出力の近似的な値を含む)を決定する工程、(b)電源出力の公称リードバック値を測定する工程、(c)公称ターゲットパラメータ値についての所定のパターンで、ターゲットパラメータを変化させる工程、(d)ターゲット要素が変化したときに、電源出力のターゲットパラメータリードバック値、および荷電粒子ビームシステムのターゲット要素の下流のビーム電流を測定する工程、(e)少なくとも観測されたピークビーム電流の所定の部分、少なくともビーム電流のひとつの測定とほぼ同時に記録されたターゲットパラメータリードバック値の、少なくともひとつの測定からなるセットの最大の構成要素により境界をもつ値の範囲内で、最適なリードバック値を決定する工程と、(f)公称リードバック値と最適なリードバック値との間の、符号付き違いの予め定められた関数により、公称ターゲットパラメータ値を調節する工程、ならびに(g)ビーム電流が所定の基準値を満たすまで、少なくとも工程(b)、(c)、(d)および(e)の二つ以上の繰り返しを実行する工程とを含む。
【0014】
さらに、本発明の他の態様にしたがって、荷電粒子ビームシステムにおいて、ターゲット要素のターゲットパラメータの調整を評価する方法が提供されるが、ここで、荷電粒子ビームはターゲット要素を通過し、ターゲットパラメータは荷電粒子ビームの下流の近似的な焦点を決定する。本方法は、(a)公称ターゲットパラメータ値(ここで、ターゲットパラメータはターゲット要素の下流に位置するビーム電流検知装置の面における、荷電粒子ビームの近似的な位置を決定する)を決定する工程、(b)荷電粒子ビームが交互に、電流検知装置上に入射したり、入射しないように、公称制御パラメータ値について、所定のパターンでターゲットパラメータを変化させる工程、(c)ターゲットパラメータが変化したとき、ビーム電流検知装置でビーム電流を測定する工程、(d)ビーム電流検知装置上への荷電粒子ビームの入射と、入射しないこととの間の遷移のシャープ性を決定する工程、および(e)少なくとも部分的に遷移のシャープ性に基づいてターゲットパラメータの調整を評価する工程を含む。
【0015】
本発明の他の態様にしたがって、荷電粒子ビームシステム(荷電粒子ビームがターゲット要素を通って運ばれる)において、ターゲット要素のターゲットパラメータの調整を評価する装置が提供される。本装置は、ターゲット要素の下流に位置する制御要素の制御パラメータを変化させる手段(制御パラメータはターゲット要素と所定の関連をもつ)、制御パラメータが変化したとき、ターゲット要素の下流のビーム電流を測定する手段、およびビーム電流測定およびターゲット要素と制御パラメータとの間の所定関係に基づいてターゲットパラメータの調整を評価する手段を含む。
【0016】
本発明の他の態様にしたがって、荷電粒子ビーム装置が提供される。荷電粒子ビーム装置は、ターゲットパラメータにより制御されるターゲット要素、制御パラメータにより制御され、ターゲット要素の下流に位置する制御要素、制御要素およびターゲット要素を通って運ばれる荷電粒子ビームを検知する、ターゲット要素の下流に位置するビーム検知器、および制御パラメータを変化させ、ターゲット要素と制御パラメータとの間の所定の関係に基づいて、ビーム検知器から受信するビーム電流測定値に応答して、ターゲットパラメータの調整を評価する制御器を含む。
【0017】
本発明の他の態様にしたがって、荷電粒子ビームシステムが提供される。荷電粒子ビームシステムは、荷電粒子ビームが運ばれて通るひとつ以上のビームライン要素、システムを制御する中央制御器、および中央制御器からの調整命令に応じて、ビームライン要素の選択されたひとつを自動的に調整する調整アルゴリズムを含む、少なくともひとつの局所制御器を含む。
【0018】
本発明の他の態様にしたがって、荷電粒子ビームの焦点を調節する方法が提供される。本方法は、(a)開口のエッジを横切って荷電粒子ビームを偏向する工程、(b)ビームが開口のエッジを横切って偏向されたとき開口の下流のビーム電流の変化の割合を決定する工程、(c)荷電粒子ビームの焦点を種々に設定するために、工程(a)および(b)を繰り返す工程、および(d)ビームが開口のエッジを横切って偏向したときに開口の下流におけるビーム電流の変化が最も高い割合となるように、焦点設定を選択する工程を含む。
【0019】
本発明の他の態様にしたがって、荷電粒子ビームが運ばれて通る複数のビームライン要素、集中制御器、ビームライン要素の個々を制御する、ひとつ以上の電源制御器を含む荷電粒子ビームシステムのための調整方法が提供される。本方法の工程は、中央制御器が電源インターフェースの選択されたひとつに調整命令を送ること、選択された電源の制御器が自動的に、調整命令に応じて調整アルゴリズムを実行することを含む。
【0020】
本発明は添付図面に関連した以下の詳細な説明に基づき理解されよう。図面は、同じまたは同様の要素には同じ符号が付されている。明確化の目的で、全ての要素に符号が付されてはいない。
【発明を実施するための最良の形態】
【0021】
本発明は、イオン注入器に限定するものではないが、荷電粒子ビームの自動調整の方法および装置を提供する。イオン種および/またはイオンエネルギーのような、イオン注入器により生成されるイオンビームのパラメータが変化するときに、調整が必要となる。さらに、ドリフトおよびイオンビームに影響を与える他の変化を補償するために、動作中、或る間隔で調整が必要となる。本発明は、従来技術の手動および自動調整技術と比較して高速で調整する方法および装置を提供する。本発明は特に、磁気要素のような応答の遅い要素(応答の遅い要素に限定されないが)に対して有用である。本発明の実施に適したイオン注入が下述される。しかし、本発明はどのイオン注入器にも適用でき、特に、荷電粒子加速器または質量スペクトロメータといった、どの荷電粒子ビームシステムにも適用できる。
【0022】
図1に示されているように、イン注入器10がイオン源12を含む。イオン源12からのイオンが、正のイオンビーム14を形成するために、抽出電圧の適用により加速される。この段階でのイオンビームはイオン化されたイオン源材料の多数の成分および多数の同位体を含む。特定の同位体が質量分析器16により選択される。そして、イオンビーム14は低エネルギー磁気四重極子18(加速器20に入射する前に、ビームの焦点が合わされ集中化される)で調整される。イオンビーム14は加速器20により所望のエネルギーへと加速される。
【0023】
イオンビーム14が加速器20から出た後、ビーム14を走査器24へとその入口に集束する高エネルギー磁気四重極子22により調整される。高エネルギー磁気四重極子22を通ったビーム14は、不所望の電荷状態をもつイオンを除去するための電荷状態分離磁石23を通って、走査器24に至る。走査器24はエンドステーション28にあるウエハ27の表面にわたってビームを走査する。平行化磁石26はエンドステーション28内のウエハ27上へのビームの入射前に、ビームを平行化して、ビーム14がウエハ27の表面にわたって一定の角度で入射することを確実にするためのものである。可動なファラデーカップは、イオンビーム14の調整を容易にするために、ビーム経路にそって設けられる。
【0024】
制御システム
イオン注入器の各要素12、16、18、20、22、24、26を制御するために、制御システム29が与えられている。図2に示されているように、制御システム29は中央制御器30およびひとつ以上の分散した電源インターフェースを含む。中央制御器30は、動作電圧および電流のような一般的パラメータをこれらの要素に対して設定するため、そしてイオンビームを最適化すべく個々の要素を調整するために分散電源インターフェースと関連して使用される。
【0025】
一実施例では、中央制御器30は、イオン注入器の使用者からの入力を受信し、イオン注入器を調整するように構成されたコンピュータシステムのハードウエア、ファームウエアおよびソフトウエア要素の組み合わせである。コンピュータシステムは、この例では、イオン注入器が、所望のビームパラメータを入力すること以外、使用者により重大な介入なく、所望のビームプロファイルを自動的に生成できるように、構成されている。本発明は、開示の実施例に限定されず、制御システムの特定の条件、イオン注入器の要素の物理的な相互関係、および使用されるコンピュータ設備のタイプに依存して種々の形態をとることができる。たとえば、制御システムは、任意に(必須ではないが)、個々のウエハを追跡すること、注入走査の間ウエハに適用されたドーズ量のレベルを規定することといった付加的な機能、イオン注入器に関連した制御システムによって共通に達成される他の機能を実行してもよい。
【0026】
適した制御システムの例のブロック図が図2に示されている。イオン注入器制御システム29は中央制御器30、およびイオン注入器の個々の要素または要素群と関連した電源インターフェースを含む。中央制御器30は、第一の直列リンク32および第二の直接リンク33により、質量分析電源インターフェース34、低エネルギー四重極子電源インターフェース36、高エネルギー四重極子電源インターフェース38および磁石電源インターフェース40に接続されている。直列リンク32および33は電源インターフェースにループとなって接続する。制御システム29は、直列リンク32および33の破線部分により示されたような付加的な電源インターフェースを含んでもよい。電源インターフェースに反対向きになって接続された二つの直列リンクは、冗長性のために利用される。直列リンク32および33は光ファイバー通信であってもよく、従来から知られているように、SDLC直列プロトコルを利用してもよい。電源インターフェース34−40は下述するように、イオン注入器の個々の要素および中央制御器30と通信する。
【0027】
異なる制御システムのアーキテクチャが利用できることは理解されよう。たとえば、直列リンク32および33は、光または電気信号を使用することができる。さらに、直列リンク32および33は、パラレルバスまたは他の適切な通信技術で置き換えることもできる。中央制御器30はループ構成によるほか、電源インターフェースのそれぞれと個々に直接接続されてもよい。
【0028】
制御システムの機能は種々の方法で区分化されてもよい。好適な実施例では、電源インターフェース34−40は下述するように調整アルゴリズムを実行する十分な能力をもつ。このアーキテクチャは、中央制御器30と個々の電源インターフェースとの比較的頻繁な通信の調整速度を高めるといる利点をもつ。他のアーキテクチャでは、電源インターフェースの機能のほとんど、またはすべては中央制御器30に組み込まれる。このアプローチは中央制御器30を複雑にするという欠点がある。
【0029】
中央制御器30はマイクロプロセッサ、RAM、ROM、ディスク・ストレージのようなメモリーデバイス、ユーザーインターフェースおよび電源インターフェース34−40と通信する通信ポートを含む汎用性コンピュータであってもよい。ユーザーインターフェースは従来から知られているビデオモニター、キーボード、およびポインティングデバイスを含んでもよい。コンピュータシステムはまた、特別にプログラムされた、特別なハードウエア、アプリケーション専用集積回路またはハードウエハ要素、ソフトウエア要素の組み合わせで実施されてもよい。
【0030】
質量分析器の電源インターフェース34の実施例のブロック図が図3に示されている。汎用性ハードハードウエアの構成が利用されてもよく、電源インターフェース36−40は同じハードウエア構成をもってもよい。電源インターフェース34はバス156により相互接続されたプロセッサ(CPU)150、ランダム・アクセス・メモリー(RAM)152およびリード・オンリー・メモリー(ROM)154を含む。中央制御インターフェース160は、直列リンク32,33とバス156との間のインターフェースを備える。アナログ−デジタルコンバーター162がイオン注入器の要素からのアナログ入力を受信し、対応するデジタル信号をバス156に与える。デジタル−アナログコンバータ164がバス156上のデジタル信号を受信し、イオン注入器の要素にアナログ出力を与える。バス156に接続されたデジタルI/Oインターフェース166がイオン注入器からのデジタル入力をイオン注入器に与える。電源インターフェースは種々の動作、設定および診断機能を実行し、特に下述される調整アルゴリズムを実行するようにプログラムされている。電源インターフェースは図3の実施例に限定されず、汎用性および特定の目的のプロセッサ構成が本発明の範囲内で利用することができることは理解されよう。
【0031】
制御プロセス
図2のイオン注入器制御システムにより実施される制御プロセスの例が図4に示されている。一実施例では、プロセス工程のひとつのサブセットが中央制御器30により実施され、プロセス工程の他のサブセットが電源インターフェース34−40により実施される。図示の実施例では、中央制御器30と電源インターフェース34−40との間の制御プロセスをこのように分離することで、付加的なタスクを開始するために、中央制御器30が都合よく機能できるようになる。さらに、この構成により、中央制御器30は、要素の局所的なサブグループにわたっての制御を、電源インターフェースに任せることができ、これによりコンピュータに必要な多数の通信チャネルを最少にすることができる。さらにまた、電源インターフェース34−40の制御機能の一部を電源インターフェース34−40にもたせることにより、イオン注入器調整速度は、従来技術のイオン注入器アーキテクチャ(ここでは、コンピュータは、10Hzから20Hzのオーダの割合で、電源インターフェースからの更新を受信)と比較して増加する。図4に図示の実施例では、工程200−216および220−224は中央制御器30で実行され、工程226−238はひとつ以上の電源インターフェース34−40で実行される。しかし、本発明はこの例に限定されず、中央制御器30と電源インターフェース34−40との間の制御プロセスでどのような便利な分離も使用するがことができる。実際、本発明はこのようにして制御プロセスの分離を利用するシステムに限定されず、必要であれば、中央制御器30は制御プロセスの全工程を実行するように構成してもよい。各電源インターフェースにより手順を実行するためのプロセスは、下述される。
【0032】
図4に示されている実施例では、中央制御器30は最初に工程200で待機する。中央制御器30は、イオン注入器10により形成される所望のビームプロファイルに関する工程208で、ユーザーからの入力を受信したとき、中央制御器30は工程210で所望のビームプロファイルに対応するデータベースから情報を検索する。中央制御器30はつぎに、ビームを確立するために工程212で電源インターフェース34−40へと、最初のパラメータ値を出力し、工程214および216で、調整命令を電源インターフェースに送ることにより、関連した要素を調整するように、第一の電源インターフェース34に指示する。中央制御器30が、工程218で、電源インターフェース34−40のひとつからの、電源インターフェースがイオン注入10のそれぞれの要素を調整したことを示す応答を受信したとき、中央制御器30は、全電源インターフェースが工程220でそれぞれの要素を調整したかどうかを決定するために、確認する。全ての要素が工程222で調整していないならば、中央制御器30は工程214および216で、電源インターフェース34−40のつぎの一つに、調整命令を送る。全ての要素が調整したとき、中央制御器30は工程224に戻り、工程200で付加的な入力を待つ。イオン注入器が典型的にイオン源で開始し、ウエハへと下流にむかって機能しながら調整される。しかし、本発明はこのことに限定されない。
【0033】
イオン注入器10の操作者は任意に、このプロセスの間、ひとつ以上の間隔で更新されてもよい。好適に、イオン注入器10の操作者は、イオン注入器が調整したときに、少なくとも工程224で知らせを受ける。
【0034】
工程216で、調整命令を受けると、個々の電源インターフェースは、工程226で制御する注入器10の要素のひとつ以上に、最初の制御電圧を出力する。要素の調整を起こすことができるように、電源インターフェースはまた、下述するように工程216で制御要素に、変調信号を出力する。変調信号は、イオンビームでのターゲット要素の影響をモニターする目的で、制御要素の動作電圧または電流のような制御パラメータを変調するために使用され、これにより、ターゲット要素に影響を与えるターゲットパラメータをどのように調節するかが決定される。
【0035】
最初の制御電圧の設定後に、電源インターフェースは制御パラメータを変調し、変調の間、ビーム電流または対象の他のビームパラメータを表わすリードバック信号を工程228で受信する。電源インターフェースは、ターゲット要素が十分に調整されているかどうか、そして工程230でターゲット要素の調整を改善するために、ターゲットパラメータの交代がありそうかどうかを決定するために、リードバック信号を使用する。ターゲット要素が十分に調整されたかどうかの決定は下述する。リードバック信号はイオンビームにおける変調信号の効果を反映することから、電源インターフェースは、イオン注入器10の動作を信号値の範囲にわたってモニターし、ターゲットパラメータがそこからターゲット要素の調整を達成するために調節されるべき方向を演繹する。
【0036】
工程232でターゲット要素が十分に調整されないと、電源インターフェースは工程234で、新しいターゲットパラメータを出力する。新しいターゲットパラメータは、今のターゲットパラメータから、固定または可変の量を加えまたは引くといった、適切なアルゴリズムを使用して計算することができる。加え、また引く量が変化すると、特定の量は、たとえば、電源インターフェースにより、下述する効果的な方法で、ターゲットパラメータを最良の値に集束させる、内挿アルゴリズム、積分アルゴリズム、または他のアルゴリズムを使用して、決定してもよい。
【0037】
ターゲットパラメータが工程234で出力されると、電源インターフェースは工程228でリードバック信号を受信し、再度工程230で要素が十分に調整されているかを決定する。電源インターフェースは、下述するようにターゲット要素が工程236で十分に調整されたかどうかを決定するまで、工程228,230、232および234の調整プロセスを繰り返す。電源インターフェースは、調整手順を完了すると、工程238で変調信号を終了し、工程218で中央制御器30に調整応答を出力する。電源インターフェースがひとつ以上の要素、または対象の要素のひとつ以上のパラメータの調整を担当してもよく、この場合、電源インターフェースは、調整すべき各要素またはパラメータに対して、工程228,230、232および234の調整プロセスを実行する。
【0038】
調整プロセス
調整プロセスの一つの目的は、イオン注入器のビームラインを通して、所望の種のイオンビーム電流を最大にすることである。質量分析器16および平行化磁石26のような磁気的な要素に対して、従来技術の調整プロセスは典型的に、数値範囲にわって磁石の電流を変化させること、ビーム電流をモニターすることに関する。磁石電流は、最大のビーム電流を生成した値に設定された。しかし、イオン注入器や荷電粒子ビームシステムに使用される磁気的要素は典型的に大きく、本質的に磁石電流の変化に対する応答が遅いものである。したがって、調整プロセスは本質的に遅い。
【0039】
図5に示されているように、調整プロセスの速度は、本発明の態様にしたがい、制御要素300の制御パラメータを変調し、制御要素の下流のイオンビームにおける効果を測定することにより、従来技術の調整プロセスに比べ増加する。変調は、事実上、数値範囲にわたって、連続的にまたは段階的に、制御パラメータの走引を行う。変調は、たとえば、周期的な波形、または分離した値の連続であってもよい。ターゲット要素310は典型的に、制御要素300とターゲット要素310との間の特定の関係から、制御パラメータが変化し、または変調されたとき、イオンビームに可変な効果を及ぼす。
【0040】
図5において、ターゲット要素310は調整を必要とする要素であり、制御要素300はターゲット要素310の調整を支援するために使用される。イオンビーム電流は、たとえば、ターゲット要素310の下流に位置するファラデービーム検知器のようなビーム検知器312により測定されてもよい。制御パラメータおよびターゲットパラメータは電源インターフェース314により生成され、ビーム検知器312からのビーム電流リードバックは電源インターフェース314によりモニターされる。
【0041】
ターゲット要素310の下流のイオンビームにおける、変調された制御パラメータの効果は、ターゲット要素310のターゲットパラメータの調節の必要性を評価するために使用される。ターゲット要素310の調整の評価が誤りの調整状態を示す場合、ターゲットパラメータは、調整を改良するために調節することができる。典型的に、ターゲット要素310は磁気要素のように、応答の遅い要素であり、制御パラメータ300は、静電ビーム加速器または静電ビーム偏光器のような、応答の早い要素である。調整手順は、制御要素300とターゲット要素310との間の既知の関係、およびターゲット要素310の下流のイオンビーム電流がターゲットパラメータおよび制御パラメータの両方の関数であることに基づく。
【0042】
上述したように、イオンビーム電流はファラデービーム検出器によりモニターすることができる。他の実施例では、イオンビーム電流は、ピアソンコイルのような検知コイルによりモニターすることができる。ある実施例では、イオンビーム電流は、Bergozから入手可能な変調パラメトリック電流変圧器によりモニターすることができる。一般的に、イオンビーム電流を検知することができるどのデバイスも利用できる。
【0043】
電源インターフェース314は調整アルゴリズムにしたがって、制御パラメータを調整し、ビーム電流のリードバックに応答してターゲットパラメータの調整を評価する。誤った調整状態が観測されると、ターゲットパラメータは調節される。電源インターフェース314は中央制御器から調整命令を受信し、その調整命令に応答して、自動的に、調整アルゴリズムを実行する。
【0044】
図5の実施例では、「画像化」法として参照される調整方法が、ターゲット要素310およびターゲット要素310の下流に位置する制御要素300を使用する。他の実施例では、「サーチ」法として参照される調整方法が、別個の制御要素を使用せず、調整の評価が、ターゲットパラメータを変調し、ターゲット要素の下流のイオンビーム電流におけるこの変調の効果をモニターすることによりなされる。他の実施例では、イオンビームのスポットの大きさは、開口のエッジを横切ってビームを走査し、ビームの焦点の鮮明さを評価することにより、評価される。
【0045】
ターゲット要素310のような、ビームライン要素に関し、ターゲット要素に対するターゲットパラメータをビーム電流に関連付ける関数F1がある。この関数は、X軸がターゲットパラメータで、Y軸がビーム電流のグラフで示すことができる。正しい調整が、最大のビーム電流に対応するとき(最もよいビームライン要素に対して正しい)、調整手順の目的は、このグラフに全体的なピークを位置づけ、最大のビーム電流を達成するために調節することである。
【0046】
多くの場合、制御要素300のような、第二の要素がターゲット要素310と特別な関係をもつ。特に、システムがある状態にあるとき、ターゲット要素310のターゲットパラメータを値Aに調節し、または制御要素300の制御パラメータを値Bに調節することにより、ビームに同じ変化を生じさせることが可能となる。このことは、制御要素300の制御パラメータを調節することが、ターゲット要素310のターゲットパラメータを調節することよりも容易であるとき、同様の調整情報がどちらかのパラメータを調節することにより得られることから、有用である。数学的には、このことは、ターゲット装置310のターゲットパラメータおよび制御要素300の制御パラメータに関連する伝達関数Tとして示され、制御要素300の制御パラメータを値Bに調節することが、ターゲット要素310のターゲットパラメータを値Aに調節することと同じ電流値をもたらす。実際上、ターゲット要素310に対する可能な設定の範囲は、制御要素300に対する可能なセットの範囲にある。このことは、ターゲット要素310のターゲットパラメータの正しい設定に関する情報が、制御要素300の制御パラメータを変えることにより得られることを意味する。
【0047】
都合のよいことに、伝達関数Tが単調関数であるときには、伝達関数Tの正確な形を知る必要がない。特に、相関関係は、ターゲット要素310と制御要素300との間の方向性の相互関係が知られている限り、活用することができる。したがって、制御要素300の制御パラメータをそのベースライン値の上または下に調節することが最大のビーム電流を形成するかどうかを決定することにより、ターゲット要素310に対するターゲットパラメータが調節されなければならない方向に関する(制御要素300の制御パラメータがそのベースライン値に戻ると仮定して)情報が与えられる。
【0048】
たとえば、偏向磁石による荷電粒子ビームの偏向は、磁石により形成される磁場および荷電粒子ビーム内の荷電粒子のエネルギーの関数である。イオンビームから所望の種を選択するために使用される質量分析器16は図6に示されている。質量分析器16は、磁石332、分離マスク334および磁石電源336を含む。磁石332は、離された磁石ポールピース(イオンビーム14の経路のために間に間隙を有する)および磁石コイル(図示せず)を含む。磁石電源336は、磁石ポールピースの間の間隙に磁場Bを形成するために、磁石コイルに磁気電流を与える。分離マスク334は所望のイオン種を通過させる分離スリット338を有する。
【0049】
イオン源12はアークチェンバー340、抽出電極342および抽出電源346を含む。アークチェンバー340はイオンビームを生成し、抽出電極342はイオンビーム14を所望のエネルギーへと加速する。イオンビーム14のエネルギーは、抽出電源346で抽出電極342に適用される抽出電圧により決定される。
【0050】
質量分析器16が適正に調整されたとき、イオンビーム14内の所望の種が、磁石332により既知の角度だけ偏向され、分離スリット338を通過する。望ましくないイオン種は、いろいろな角度に偏向され、分離マスク334により遮断される。磁石332による所望のイオン種の偏向は、磁石ポールピースの間の間隙の磁場Bの関数である(また、磁石電源336により供給される磁石電流の近似的な関数である)。さらに、磁石332によりイオンビーム14の偏向はイオンビームエネルギーの関数である(また、イオン源12の抽出電力342に適用される抽出電極の関数である)。
【0051】
この例では、磁場Bは磁石電流の変化に対し遅い応答を示すのに対して、ビームエネルギーは抽出電圧の変化に対し早い応答を示す。遅い応答の磁石332を素早く調整するために、磁石はターゲット要素として指定され、イオン源12の抽出電極は制御要素として指定される。抽出電圧(制御パラメータ)は所望のベースライン値について変調され、分離スリット338の下流のビーム電流は、典型的にビーム検知器350により、モニターされる。ファラデービーム検出器350は好適に、検知されたビーム電流に応答してファラデーリードバック電圧を与える電流−電圧コンバータを含む。リードバック電圧は、したがってイオンビーム電流を表わす。
【0052】
電源インターフェースは、制御パラメータおよび対応するビーム電流の対となった値のセットを得る。制御パラメータ値は予め定めた変調値または測定値であってもよい。対となった値は同時にまたは非同時に得られる。対となった値のセットは、磁石要素の調整を評価するために使用される。
【0053】
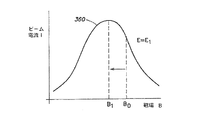
図7に示されているように、曲線360は磁石332により形成される磁場Bの関数として、分離スリット338の下流のビーム電流Iを示す。ビーム電流は磁場B1に対してピーク値をもつ。注入プロセスの条件に基づき、磁場が初期値B0をもち、必要なビームエネルギーがE1とする。調整プロセスの目的は、分離スリット338の下流のピークビーム電流Iが必要なエネルギーE1で生じるように、磁場を値B1に調節することである。図8に示されているように、分離スリット338の下流のビーム電流はビームエネルギーEの関数である。曲線362は未調整状態に対するビームエネルギーの関数として、ビーム電流を示す(ここで、磁場はB0で、ピークビーム電流はエネルギーE1で生じない)。曲線364は調整状態に対するビームエネルギーの関数として、ビーム電流を示す(ここで、磁場はB1で、ピークビーム電流はE1で生じる)。
【0054】
エネルギーE1のピークビーム電流を形成する磁場B1で確実に動作するように、質量分析器磁石332を素早く調整するプロセスの例が図9のフローチャートを参照して説明される。応答の遅い磁石332はターゲット要素として指定され、イオン源12の応答の早い抽出電極342は制御要素として指定される。工程370で、制御パラメータ(抽出電圧)は抽出電源346で適用された抽出制御電圧を調整することにより、所望の値について変調される。図6−図8の例では、抽出電圧は、図8の矢印366により示されているように、必要なビームエネルギーE1についてビームエネルギーを変調するように、抽出電圧は変調されている。
【0055】
工程372で、ターゲット要素の下流のビーム電流は、制御パラメータが変調されたときに測定される。図6−図8の例において、分離スリット338の下流のビーム電流はファラデービーム検知器350により測定される。かくして、所望の偏向角のビーム電流が測定される。図10は、制御パラメータの変調の間、時間の関数となる、ファラデーリードバックの例を示す。図10において、曲線390は変調された制御パラメータを表わし、曲線392はサンプルファラデーリードバック電圧を表わす。制御パラメータの変調の中心は時刻t1で生じ、ピークリードバック電圧は時刻t2で生じる(未調整の状態を示す)。ビーム電流測定値は工程374で分析され、特にピークビーム電流は所望のビームエネルギーE1のビーム電流と比較されてもよい。エネルギーE1のビーム電流とピークビーム電流との差は、ターゲット要素の調整または未調整を示す。すなわち、エネルギーE1のビーム電流およびピークビーム電流が異なる場合は、ターゲット要素は未調整である。
【0056】
工程376において、ターゲットパラメータが最適な調整を示す所望の値に十分に接近しているかどうかが決定される。ターゲットパラメータが所望の値に十分に接近しているかどうかの決定は下述される。しかし、この決定は、エネルギーE1のビーム電流がピークビーム電流の特定の範囲に内にあるという決定に基づく。
【0057】
ターゲットパラメータが工程376で、所望の値に十分に接近していないと判定されたとき、ターゲットパラメータの調節が工程378で決定される。調節の方向および増加の大きさの両方が、ターゲットパラメータの調節と関連する。調節の方向は典型的に、曲線362のエネルギーE1からのずれ(図8)の方向、および制御およびターゲット要素の動作特性に基づいて知られている。調節の方向は、工程372で得られたビーム電流の測定値に応答して、制御器で再度プログラムされてもよい。ターゲットパラメータ調節の大きさはまた、制御要素およびターゲット要素の知識、ならびにE1のビーム電流とピークビーム電流との違いに基づいてもよい。しかし、調節が調整工程で一度以上の繰り返しで達成され得ることから、正確な調節の大きさは要求されない。一つのアプローチとして、調節の増加は、調整の開始でより大きく、続く切り返しで減少する。工程380で、ターゲットパラメータは選択された調節の増加により、選択された方向に調節される。プロセスはつぎに、調節プロセスの他の繰り返しを実行するために工程370に戻る。ターゲットパラメータが所望の値に十分に接近しているという決定が工程376でなされると、ターゲット要素の調整プロセスは完了する。
【0058】
電源インターフェース
個々の電源インターフェース34−40および各電源インターフェース34−40により影響を受ける要素は、図11、図13、図15および17に示されている。イオン注入器10の要素の制御は電源インターフェース34−40(ここで説明した調整アルゴリズムを実行する)と関連して記述する。電源インターフェース34−40により実行される調整プロセスの実施例のフロー図がそれぞれ、図12、図14、図16および図18に示されている。
【0059】
図11、図13、図15および図17に示されているように、イオン注入器のそれぞれの要素の動作に必要な電源は各ブロック内に含まれ、電源インターフェースは各電源に制御信号を送る。したがって、たとえば、図11において、イオン源12は抽出電源346(図6)を含み、質量分析器16は磁石電源336を含む。
【0060】
図11に示されているように、質量分析器電源インターフェース(PSI)34はイオン源12、質量分析器16および低エネルギーファラデービーム検知器58と接続する。従来から知られているように、ファラデービーム検知器はイオンビームに応答して電流を生成する装置である。ファラデービーム検知器58は好適に、検知されたビーム電流に応答して、ファラデーリードバック電圧を生成するための電流−電圧コンバータを含む。PSI34は、イオン源12の抽出電源を制御するために、抽出制御電圧をライン72に出力し、質量分析器16の質量分析器電源を制御するために、質量分析器制御電圧をライン74に出力する。PSI34は、ライン82の制御出力信号を介して、コンピュータ32と通信する。PSI34はまた、入力として、コンピュータ32から、ライン74で制御入力信号を、ライン78で抽出リードバック電圧を、ライン80で低エネルギーファラデーリードバック電圧を受信する。抽出リードバック電圧は抽出電源の出力を表わし、ファラデーリードバック電圧は質量分析器16の下流のビーム電流を表わす。
【0061】
動作中、図12に示されているように、中央制御器30は工程400で質量分析器の調整のためにイオン注入器をセットする。このことは低エネルギーファラデービーム検出器58を所定の位置に移動することを含む。工程402において、中央制御器30は質量分析器PSI34に調整命令を送る。選択されたビームプロファイルに対して制御電圧の近似的な値が、中央制御器30によりシステムデータベースでアクセスでき、質量分析器PSI34に送られる。質量分析器PSI34は、工程404で初期の制御電圧を送るために、近似的な値を使用する。特に、質量分析器PSI34は、ライン72で初期の抽出制御電圧を、ライン74で初期の質量分析器制御電圧を設定する。図5−図10に示され、上述した調整アルゴリズムが利用される。質量分析器PSI34は、イオン源12に適用される抽出制御電圧を変調し、低エネルギーファラデーリードバック電圧をモニターする。リードバック電圧値は、上述のように質量分析器制御電圧に対する必要な調整を決定するために分析される。調整アルゴリズムを数回繰り返すことが、所望の調整を達成するために必要となるかもしれない。質量分析器の調整が完了した後、調整した応答が工程408で中央制御器30に送られる。
【0062】
ライン74での質量分析器制御電圧をモニターすることによる質量分析器16の調整は、ライン74での制御電圧が変化したとき質量分析器16の磁石が安定化するために数秒を要することから、時間の浪費となろう。
【0063】
より速い同調を達成するために、質量分析器16はライン72での抽出制御電圧をモニターし、質量分析器16の下流のイオンビームを低エネルギーファラデービーム検知器58でモニターすることにより、調整される。イオンビームエネルギーが変化するように、ライン72での抽出制御電圧を変調することは、質量分析器16の磁石の磁場を変調することと同等であり、PSI34がイオンビーム14におけるより強いまたはより弱い効果を判定することができるようにする。
【0064】
低エネルギー磁気四重極子18の調整が、図13および図14に関連して説明される。図13に示されているように、低エネルギーの磁気四重極子電源インターフェース(PSI)36は低エネルギー磁気四重極子18および高エネルギーファラデー62と接続する。特に、PSI36はライン84において低エネルギー磁気四重極子制御電圧を出力する。この実施例の低エネルギー磁気四重極子18は対となった数個の電極を有し、各対は電源から自らの動作電圧を受信する。したがって、ライン84での制御電圧は、左右のバランス、上下のバランス、強度およびトリム(trim)を含む、低エネルギー磁気四重極子18の複数のパラメータを制御するために使用される。
【0065】
PSI36はまた、ライン86で低エネルギー磁気四重極子リードバック電圧を、ライン88で低エネルギーファラデーリードバック電圧を、さらにライン90で制御器入力を受信する。低エネルギー四重極子リードバック電圧は低エネルギー四重極子電源の出力を表わし、低エネルギーファラデーリードバック電圧は電荷状態分離磁石23の下流のビーム電流を表わす。低エネルギー磁気四重極子18が完全に調整されたとき、PSI36はライン92において調整応答を出力する。
【0066】
動作中、図14に示されているように、中央制御器は工程500で低エネルギー四重極子の調整のためにイオン注入器を設定する。セットは、高エネルギーファラデービーム検知器62を所定の位置に移動することを含む。一実施例では、高エネルギーファラデービーム検知器62は走査器24の偏向プレートの間に配置される。他の実施例では、高エネルギーファラデービーム検知器62は平行化磁石26のためのビームダンプ(dump)に配置される。この実施例では、平行化磁石26は高エネルギーファラデービーム検知器62でビーム電流の測定を行うためにオフとなる。工程502において、中央制御器30は低エネルギー四重極子PSI36に調整命令を送る。選択されたビームのプロファイルに対する制御電圧の近似的な値が中央制御器30によりシステムデータベースより入手され、PSI36に送られる。工程504にいて、PSI36は選択されたビームのプロファイルのために初期の制御電圧を設定するために近似的な値を使用する。特に、PSI36はライン84において、低エネルギー四重極子18の電極のセットのそれぞれに対する低エネルギー四重極子制御電圧を設定する。PSI36は、工程506で、ピークビーム電流に対して、選択された電極のセットの制御電圧を調節する。この調節は、選択された電極の制御電圧を変調し、ピークビーム電流を与える制御電圧値を観測することにより、達成される。制御電圧は、ピークビーム電流を与える値に設定される。工程508において、調節プロセスは低エネルギー四重極子18の電極の各セットに対して繰り返される。全ての電極のセットがピークビーム電流に対して調節された後、調整応答が工程510で中央制御器30に送られる。
【0067】
高エネルギーファラデービーム検知器62はつぎに、必要に応じてイオンビームの経路から移動してもよく、または電荷状態分離磁石23または高エネルギー磁気四重極子22のような、次のベースライン要素を調整する他の電源インターフェースの使用のための位置に残されてもよい。
【0068】
低エネルギー磁気四重極子18を調整するために、PSI36は、変調された制御電圧を形成するために、AC成分を選択されたライン84のDC制御電圧に重ね合わせる。低エネルギー磁気四重極子18の電極に生じる実電圧はライン86において、低エネルギー磁気四重極子リードバック電圧を通して、PSI36に入力される。PSI36はライン88において、高エネルギーファラデーリードバック電圧サンプルを受信し、これら電圧サンプルを、低エネルギー磁気四重極子18の電極の電圧に関連付け、最大のビーム電流を与える制御電圧を決定する。同じプロセスが、低エネルギー磁気四重極子18の電極の各セットに対して実行される。
【0069】
低エネルギー磁気四重極子を調整するためのプロセスに似ている。同様に、電荷状態分離磁石23の調整も図11および図12と関連して上述したように、質量分析器14を調整するためのプロセスの概念と近似する。これら二つの要素を調整することが図15および図16に関連して説明される。
【0070】
図15に示されているように、高エネルギー磁気四重極子の電源インターフェース(PSI)38は高エネルギー磁気四重極子22、電荷状態分離磁石23、および高エネルギーファラデービーム検知器62と接続する。上述したように、高エネルギーファラデービーム検知器62は検知器24内に配置されてもよく、あるいは平行化磁石26の下流に位置してもよい。PSI38はライン94において高エネルギー磁気四重極子の制御電圧を出力し、ライン96において電荷状態分離磁石の制御電圧を出力する。低エネルギー磁気四重極子18のように、この実施例の高エネルギー磁気四重極子は複数個の、対となったの電極をもち、各対は、電源からそれ自身の動作電圧を受信する。この場合の高エネルギー磁気四重極子の電極は、たとえば、左右の均衡および上下の均衡といったいくつかのビームパラメータのひとつを制御する。高エネルギー磁気四重極子22は、必要であれば、強度やトリムのような付加的なビームパラメータを制御することができる。
【0071】
PSI38は入力として、ライン98で、高エネルギー磁気四重極子リードバック電圧を、ライン100で高エネルギーファラデーリードバック電圧を、さらにライン102で制御入力を受信する。高エネルギー四重極子リードバック電圧は、高エネルギー四重極子電源の出力を表わし、高エネルギーファラデーリードバック電圧は電荷状態分離磁石23の下流のビーム電流を示す。高エネルギー磁気四重極子22および電荷状態分離磁石23が調整された後、PSI38はライン104において調整応答を出力する。
【0072】
動作において、図16に示されているように、中央制御器30は工程600で、高エネルギー四重極子の調整および電荷状態分離磁石の調整に対して、イオン注入器を設定する。この設定はビームの検知のための位置に、高エネルギーファラデービーム検知器62を移動することを含む。工程602において、中央制御器30は高エネルギー四重極子PSI38に、調整命令を送る。選択されたビームのプロファイルに対する制御電圧の近似的な値がシステムのデータベースにおいて入手され、PSI38に送られる。工程604において、PSI38は中央制御器30から送信された近似的な値にしたがって、初期の制御電圧を設定する。特に、PSI38はライン94において高エネルギー四重極子の制御電圧を設定し、ライン96において電荷状態分離磁石の制御電圧を設定する。工程606において、PSI38はピークビーム電流に対し、高エネルギー四重極子22の選択された電極のセットの制御電圧を調節する。低エネルギー四重極子18に関連して上述したように、PSI38は変調された制御電圧を与えるために、選択された電極のセットのDC制御電圧に、AC要素を重ね合わせる。高エネルギーファラデーリードバック電圧は、四重極子の制御電圧が変調されるときにモニターされ、制御電圧がピークビーム電流を与える値に調節される。工程608において、調節は、高エネルギー四重極子22の電極の各セットに対して繰り返される。
【0073】
工程610において、電荷状態分離磁石の調整アルゴリズムが実行される。電荷状態分離磁石23は、電荷状態にしたがいイオンをいろいろに偏向させることにより、いろいろな電荷状態をもつイオンを分離する。電荷状態分離磁石23に対する調整アルゴリズムは図5および図9に関連して上述した調整アルゴリズムに対応する。このアルゴリズムにおいて、ターゲット要素は電荷状態分離磁石23であり、ターゲットパラメータは電荷状態分離磁石制御電圧であり、制御要素は高エネルギー四重極子22の、選択された電極のセットであり、制御パラメータは高エネルギー四重極子の、選択された電極のセットの制御電圧である。高エネルギー四重極子22は、選択された電極のセットが制御電圧に応答してイオンビームの偏向を行うように設計される。偏向により、イオンビームは、ビームの偏向の関数である入射角で、電荷状態分離磁石23に入射する。イオンがいろいろな角度で電荷状態磁石23に入射することにより、イオンビームは、異なる位置で電荷状態分離磁石23から出て行くことになる。ビーム電流は入射角度の関数で変化する。ピークビーム電流が所望の入射角度と異なる入射角度で生じるとき、電荷状態分離磁石の制御電圧についての調節が決定される。決定された調節は電荷状態分離磁石に適用され、測定が繰り返される。調整プロセスは、ピークビーム電流が所望のビーム入射角度で生じまで続けられる。この調整アルゴリズムにおいて、電荷状態分離磁石23へのイオンビームの入射角度は変調された制御パラメータである。
【0074】
ライン96での制御電圧の変調により電荷状態分離磁石23を調整することは、磁石23が比較的長い応答時間をもち、ライン96における制御電圧に変化が生じると、安定化のために実質的に長い時間を要することから、比較的時間の浪費となろう。
【0075】
電荷状態分離磁石23を素早く調整するために、高エネルギー四重極子に適用される制御電圧のひとつが、電荷状態分離磁石の制御電圧の変調をシミュレートするために変調される。高エネルギー四重極子の制御電圧の変調により、イオンビームが偏向し、電荷状態磁石23への、イオンビームの入射角が変化する。高エネルギー磁気四重極子22の制御電圧の変調は、PSI38が変調のコースの間イオンビームを画像化し、上述したように電荷状態分離磁石23を調整するためのその画像を使用することできるようにする。さらに、ライン94において、高エネルギー四重極子の制御電圧を変調することは、電荷状態分離磁石23の磁場を変調することと等価であると扱うことができる。どちらの変調によっても、PSI38が、より強いまたはより弱い磁場がイオンビーム14にどのように影響を及ぼすかを決定することができるようにするからである。PSI38は、電荷状態分離磁石が調整されていないことを決定すると、ライン96において制御電圧が調節される方向を決定し、適切な調節を行う。
【0076】
工程612において、高エネルギー四重極子22の焦点を合わせる焦点合わせアルゴリズムが実行される。焦点合わせアルゴリズムは、高エネルギー四重極子22の、選択された電極のセットに、変調された制御電圧を適用することに関する。その変調は、イオンビームを、走査器入口プレート108の間の開口106を横切るようにゆっくりと走引させる。
【0077】
高エネルギーファラデービーム検知器62は開口106の背後に位置し、したがって、ビームが走査器入口プレート108により阻止されたときにのみ、ビーム14を検出する。ファラデーリードバック電圧の変化の割合を、開口106でのイオンビーム14のスポットサイズに関連付けることが可能であることが分かった。特に、より小さな直径をもつイオンビームが、一定の走引とすると、より大きな直径をもつイオンビームよりも速く開口106の縁にわたって遷移することが分かった。したがって、ファラデービーム検知器62にわたってビームが走引されると、リードバック電圧の最も大きな、一次導関数を検索することにより、高エネルギー磁気四重極子22の制御電圧を調整し、スポットサイズを最小にし、したがってビームを走査器24に入口に焦点合わせを行うことが可能になる。
【0078】
異なるスポットサイズに対し、イオンビームが開口106を横切って走引されるときに、時間の関数となるファラデーリードバック電圧の例が図19に示されている。曲線630、632および634はそれぞれ、大、中および小の直径を表わす。図示されているように、曲線634(小さなビーム直径を表わす)は開口のエッジを横切って素早く遷移し、リードバック電圧の、最も大きい、一次導関数をもつ。
【0079】
焦点合わせのアルゴリズムが工程612で実行された後、PSI38は工程614で中央制御器30に調整された応答を送る。
【0080】
平行化磁石26の調節および高エネルギー四重極子22の、任意で最後の調節が、図17および図18に記述されている。図17に示されているように、平行化磁石電源インターフェース40は、ライン110において制御入力を受信し、ライン112において制御電圧を高エネルギー磁気四重極子22に、ライン114において制御電圧を走査器24に、そしてライン116において制御電圧を平行化磁石26に出力する。PSI40はまた、ライン118において、高エネルギー磁気四重極子リードバック電圧を受信し、ライン120においてプロファイリング・ファラデーリードバック電圧を受信する。高エネルギー四重極子のリードバック電圧は、高エネルギー四重極子の電源の出力を表わし、プロファイリング・ファラデーリードバック電圧は平行化磁石26の下流のビーム電流を表わす。プロファイリング・ファラデービーム検知器68はエンドステーション28に位置し、好適には進行路の中心に位置する。
【0081】
PSI40は、走査器24でイオンビームを偏向し、プロファイル・ファラデーリードバック電圧への偏向の効果をモニターする。特に、平行化磁石26は、走査器24の応答時間に比べ、ライン116における制御電圧の変化に比較的ゆっくりと応答する。したがって、平行化磁石の制御電圧の変調をシミュレートするために、イオンビーム14を走査器24で偏向することがより速くなる。PSI40は、平行化磁石の制御電圧が調節されるべき方向を決定するために、プロファイリング・ファラデービーム検知器68からのリードバック電圧を使用する。
【0082】
動作において、図18に示されているように、中央制御器30は、工程700において、平行化磁石26を調整するためにイオン注入器を設定する。このことは、プロファイリング・ファラデービーム検知器68をその進行路の中心に移動することを含む。工程702において、中央制御器30は、選択されたビームプロファイルに対する制御電圧の適切な値とともに、平行化磁石PSI40に、調整命令を送る。工程704において、PSI40は中央制御器30から送信された適切な値に対応する初期の制御電圧を設定する。特に、PSI40はライン112において、初期の高エネルギー四重極子の制御電圧を、ライン114において走査器の制御電圧を、ライン116において平行化磁石の制御電圧を設定する。つぎに、PSI40は、工程706において、平行化調整アルゴリズムを実行する。特に、ライン114において、走査器の制御電圧はビーム14の偏向を行うために変調される。このことにより、平行化磁石26へのイオンビームの入射角度が偏向にしたがって変化する。入射角度の変化は、平行化磁石26の出力において、イオンビームの位置に変化をもたらす。プロファイリング・ファラデービーム検知器68はビームを検知し、ビームが走査器24により偏向されると、ファラデーリードバック電圧をPSI40に与える。ピークビーム電流を生成する入射角度は、平行化磁石の制御電圧116への必要な調節を決定するために使用される。このプロセスは、ピークビーム電流が走査器24によるイオンビームの所望の偏向に対して得られるまで繰り返される。
【0083】
平行化磁石の調節アルゴリズムは、上述したように、電荷状態分離磁石23を調整するために使用されたアルゴリズムと似たものである。特に、磁石はターゲット要素であり、磁石の制御電圧は磁石パラメータである。制御要素は走査器(走査器の制御電圧の変調に応答してイオンビームの偏向を行うもの)である。このアルゴリズムでは、平行化磁石26へのイオンビームの入射角度の変化は、平行化磁石26の磁場を変化させることと等価である。しかし、入射角度は、磁場よりもより素早く変化でき、したがってより素早い調整が可能となる。平行化磁石の調整アルゴリズムを工程706で完了し後、PSI40は工程708において、中央制御器30に調整された応答を送る。
【0084】
前述の説明は、イオン注入器ならびにイオン注入器の調整のための方法および装置によっている。本発明はこれに限定されるものではなく、本発明はどの荷電粒子ビームシステムも調整すべく、広く適用できるものである。
【0085】
調整手順
調整の一実施例が以下で詳細に説明される。図2に示された制御システムは、調整される要素のタイプに依存する特定の手順を実施する。しかし、制御システムにより実行される調整手順は、三つの方法、画像化、検索およびスポットの寸法の調整にグループ分けすることができる。
【0086】
画像化方法は、磁石のような応答の遅い要素を調整するために使用される。この方法において、ビームが連続して効果的に画像化されるように静電要素が変調されるとともに、磁石または他の応答の遅い要素は修正の設定(図12を参照)に調節されている。
【0087】
例示の画像化の一実施例が図10に示されている。図10において、画像化の調整方法では、静電要素のような制御要素に適用される制御電圧は変化し、ファラデービーム検知器により典型的に取得されるリードバック電圧により表わされる応答は変調の間、記録される。このことは、磁気要素に与えられるビームの空間分布の「画像」を形成する。磁気要素の制御電圧は、ビームの最も強い部分が磁気要素から離れた整合の補正をなすように調節される。
【0088】
検索方法は、応答が速い静電要素について使用することができる。この方法では、調整される要素は、今の値を取り囲む領域を効率的に画像化するために変調され、変調の中心はピークに向けて調節される。このことは、ビームの変動に対し堅牢さを与え、画像化方法と同じ調整アルゴリズムで実行することができる。
【0089】
スポット寸法の調整は、高エネルギー磁気四重極子22および高エネルギービームの焦点合わせに影響を与える他の要素を調整するために使用することができる。検索および画像化法はビーム電流を最大にしようとするものであるが、この工程はビームのスポット寸法をモニターもする。このパラメータの調整は、ビームの位置の関数となる、ビーム電流の一次導関数により示される、ビームの焦点合わせの鮮明を評価するために実行される。
【0090】
この一般化された枠組みで、制御システム特定の想定値をもたらし、これら測定値からビーム14を調整するための最適なパラメータに関する結論を引き出さなければならない。制御システムがその結論に達する方法についていくつかの対応が下述される。
【0091】
入口条件
制御システムは、ある初期の条件を確立することにより調節プロセスを開始する。たとえば、ビームがないとき、またはビームが温度の上昇のため、または種の変化のために安定しないとき、調整は実行することができない。一般に、イオン注入器が安定したビームをもたらし、制御システムが、影響が与えられる注入プロセスに対してほぼ正しい値に、ベースライン制御パラメータを初期化したことが前提となる。
【0092】
もちろん、制御システムがベースラインを完全に調整された値に初期化することができるというのではない。この場合、調整は不要であろう。用語「近似的正しい」は、調整される各要素に対し、ある補足範囲があること(初期値と調整された値との間の違いがこの範囲にあるとき、調整は達成することができる)を意味する。一般に、制御システムは、適切な補足範囲を形成するために調節されるパラメータを受け入れる。
【0093】
ファームウエア・パラメータ
ここで開示された変調調整手順は繰り返しプロセスで、ここで中心的なアルゴリズムは調整が完了するまで繰り返される。各繰り返しは、基本的には、独立したプロセスである。各繰り返しの間、プロセスはデータを収集し、そのデータを分析し、調整を調節する。特に、制御パラメータは、一連の工程を通して変化し(公称値の上下両方)、ビーム電流はモニターされ、妥当な値が記憶される。サイクルの終端で、記憶されたデータは、ターゲットパラメータがどのように調節されるべきかを決定するために分析される。最後に、ターゲットパラメータは調整された値へと調節される。
【0094】
各繰り返しにおいて、種々の条件が明らかにされなければならない。たとえば、ハードウエアにおいて、特に電源において、位相のずれがある。これら位相のずれは、ひとつのサイクルからの制御パラメータの変調が実際に、次のサイクルの期間でなされるときには、アルゴリズムの純粋度を乱す。このことは一般的に、全てのサイクルがこのような変調に関することから些細な問題であり、アルゴリズムは、電源が実際どのように機能するのかを決定するためにリードバック(命令ではない)に依存する。
【0095】
同様に、ひとつのサイクルからのデータは、装置が最適に調整されていると言えるには不十分である。したがって、多数のサイクルのからのデータが、暫定的な成功を確認するために、収集され、前のサイクルまたは直前のサイクルと関連付けれ得る。
【0096】
最後に、調整プロセスが進行すると、ターゲット要素は、調整された条件に接近する調節される。一実施例では、サイクルレベルのパラメータは、この段階で変えられる。この実施例の初期のサイクルは、偽ピークを選別できるように、広い取得範囲をもち、試験される領域が減少するように、単にピークを中央領域に入れるようにする。この実施例の後のサイクルは、ターゲット要素がほぼ調整される入力条件に依存するより狭い取得範囲をもち、最適な調整を示す最終条件に特別な注意を払う。
【0097】
データ収集
データ収集の位相に影響を与える主要な要因は、制御パラメータの変調の形状および速度を含む。ビーム電流のリードバックおよび制御パラメータが、ファームウエアの制限内で、可能か限り頻繁に達成されることを前提とし、リードバック周波数パラメータを必要であれば含めることができるが、中央制御器30から電源インターフェースへとリードバックパラメータが送信される必要はない。
【0098】
一般に、制御パラメータの変調と関連して、どの所望の波形も使用することができる。しかし、どのパラメータにおいても急速な変化を生成することは一般的に望ましくないので、公称値について徐々に行きつ戻りつする変化が望ましい。これは、サイン波、三角波、または同様の波形であってもよい。三角波は、制御パラメータの変化の最大速度を最少にすることから、いまのところ最適なものと考えられる。
【0099】
特定の波形に対する特別な需要はないが、一実施例として、所望の振幅の制御パラメータの変調があると、ソフトウエアが、それ自身の連続した制御パラメータ電圧を生成するために構成される。他の実施例では、たくさんのパラメータを導入することなく、柔軟性を最大にするために、付加的なパラメータが、列挙して、所定のセットのオプション(サイン、三角、ランプ−ドロップ(ramp-then-drop)など)からどの一般的なタイプの曲線波形が望ましいかを特定するために使用される。
【0100】
しかし、波形とちがって、制御パラメータの変調速度は一般的に重要である。変調が振幅に関してあまりにも速いと、電源を駆動する制御パラメータは維持することができなくなる。変調が、制御電圧の変化がどの程度急速に命令され得るかについてのファームウエアの限界に関連して、あまりにも速いと、命令パラメータの曲線がギザギザになる。変調が、ビーム電流のリードバックがどの程度急速にサンプル化されるかについてあまりにも速いと、生じたビームの画像に間隙があり、その結果真のピークを見逃したデータ収集となる。逆に、変調があまりにも遅いと、全体の調整プロセスは許容できない遅さとなる。
【0101】
速度の変化にはふたつのタイプがある。ひとつの変化は全サイクルの間であり、他はパラメータの命令の間の間隔である。命令がファームウエアの命令限界で送られるとすると、アルゴリズムは、所望のサイクル期間では、適切な細分性の工程手順を自動的に形成する。この場合、唯一の速度パラメータはサイクル期間である。許容値を拘束する要因は、ファームウエアの動作速度(たとえば、リードバック割合)に依存するが、他は物理的な時間(たとえば、電源)に依存する。
【0102】
データ分析
データ分析相では、PSIは、ターゲットパラメータがあまりにも高いか、あまりにも低いか、または許容範囲内かを決定する。最適化のような、データ分析相のいろいろな態様、ターゲットパラメータが十分に接近しているどうかを決定すること、エラーの方向性が下述される。
【0103】
最適化
最初に、PSIは最適な制御パラメータの設定のための値を決定しなければならない。ひとつのアプローチは、観測された最も高いビーム電流に対応する制御パラメータのリードバックを記録することである。
【0104】
このアプローチについての潜在的な問題は、エンドケース区別が許されないことである。ピークはひとつの定義された制御パラメータの設定にないかもしれない。範囲にわたって最適なビーム電流の平坦期があり、調整手順はその範囲の中心を見つけ出すことが望ましいものにする。単に、観測されたビーム電流の選択することは、各サイクルにおいて、プロセスをこの平坦期のランダム点に引き寄せるからである。アルゴリズムが、平坦期が観測される精度レベルで調整を行うことが求められるときに、これらファントムプル(phantom pull)により、アルゴリズムは、平坦期において常に動く「最良の」点について、絶え間なく精密な調整を行うことになる
【0105】
一実施例では、この問題を解決するために、最適に近いビーム電流を示す全ての読み取りからの制御パラメータのリードバックは平均化される。この方法は平坦期の中心を目指している。このことは、サイクルの間、ピークを観測したビーム電流の一部として何が最適に近いものになることを示すパラメータを必要とする。概念的には、このパラメータは平坦期の高さに関連した閾値であると考えられる。ひとつの最適なビーム電流の観測を行う単純な場合では、このパラメータは100%にセットすることができ、ピーク読み出しのみが使用される。
【0106】
平坦期の一部(全部ではなく)が可視的であると(制御パラメータの変調が平坦期に一端(他ではない)からビームをなくすことによる)、平均化技術は依然として、ターゲットパラメータに対して最適な設定の方向に関し正しい結果をもたらす。特に、平坦期の一端のみが視覚的であると、ターゲットは、制御パラメータの対称的な変化が平坦期の一端のみに及ぶことから、ピークの中心に調整されない。この場合、中心点は常に、平坦期の可視的な端部から離れている。
【0107】
最適な制御パラメータの設定が決定されると、ターゲットパラメータが余りにも高いか、または余りにも低いかを決定する必要がある。このことは、制御パラメータの変化と、ビームへの対応する効果との間の符号関係を示す極性に依存する。
【0108】
「十分な接近」の決定
最適な制御パラメータの決定に関連して、パラメータが正しい調整に十分に接近しているかどうかを決定する必要がある。制御パラメータとビーム電流との間に直接的および信頼性のある関係があると、十分な接近がどの程度の接近かを示すことについて、ひとつのパラメータで十分である。これは、たとえば制御パラメータの変化の単位のカウントとして、または全制御パラメータの変調範囲の分画(fraction)として与えられる。
【0109】
しかし、複雑な要因がある。第一に、ビーム電流はノイズを含み、「十分な接近」の条件が変化のないターゲットパラメータとともに数サイクルにわたって信頼性のあることを示すことが必要となることである。第二に、上述したように、範囲にわたって、最適なビーム電流となる平坦期があることである。第三に、あるパラメータでは、ピークの中心にあることが本当に理想的ではなく、ピークの端部にシフトすることが好適であることである。これらの問題の第一のものは、統計的に導かれたパラメータを示す一方、第二、第三のものは現れるであろう可能な曲線形状について仮説を必要とする。
【0110】
統計的な問題への、最も単純なアプローチは、「十分な接近」を全て示す一連の連続した読み出しを必要とすることである。さらに、より慎重な方法が、この窓の外に読み出しがときおりある(4の3ボーティングルールのように)ことを許す。しかし、サイクルから境界外の結果を可能にする複雑な方法がある。特に、サイクルが十分な接近を示めさないと、このアルゴリズムの正規な応答はターゲットパラメータに調節を命じることである。ターゲット要素は今や別に調整されることから、前の読み出しは、今の調整の精度の統計的な決定に直接に、妥当なものでなくなっている。したがって、「十分な接近」の範囲の外の読み出しを考慮する統計的なアプローチは調整動作を妨げるにちがいないが、ボーティングは進行する。
【0111】
連続した読み出しアプローチは、3の3ルールといったもののような、このボーティング方法の基礎的なもののように見ることができる。このアプローチでは、この区域外のサイクルは調整を再開させる。したがって、最大の柔軟性を可能にするために、ボーティング方法をファームウエアに組み込むことに利点がある。
【0112】
エラーの検出
いくつかのタイプのエラーがトラッピングのために考慮され得る。たとえば、ある場合では、偽りのピークがリードバック電圧に現れる。偽りのピークが、荷電粒子ビームシステムが不所望の同位体または要素に調整されるために、ビーム電流のピークを表わす。真のピークが、偽のピークより(偽のピークが平坦期の高さ閾値以下という十分なマージン分)高いと、偽りのピークは単に無視される。真のピークが偽りのピークより低いと、偽りのピークを除去するための何かが必要となる。任意であるが、パラメータの賢明な選択および開始条件は、偽りのピークがPSIにより検出されることを妨げることができる。しかし、他の場合、より慎重な手順が偽りのピークを除去するために必要とされる。
【0113】
一実施例では、偽りのピークは悪い区域外の結果があるサイクルで、ボーティングの早期の終了を引き起こすことにより除去できる。このことは、上述し、各サイクルからの結果の大きさを無視はするが、その結果が区域内か、区域外かを単に決定する基本的な方法の拡張である。この方法を実施するために、パラメータ(「十分な接近」閾値パラメータと似た単位で)は与えられ、サイクルが特定の範囲の外にあるとき、ボーティングが終了し、プロセスが調整に戻ることを特定する。
【0114】
他の実施例では、曲線の形状(ビーム電流対制御パラメータ)に付加的な定義が、遭遇するであろう曲線のタイプに関し、さらにイオン注入器を有効かつ正確に調整するために、アルゴリズムがどのようにこれら条件に対応するかについて、与えられる。特に、このような場合、正確な調整が最適なビーム電流に向けられず、または平坦期の中心でなく、この位置からずれている。
【0115】
調整の調節
データ分析の相が、ターゲットパラメータがどのように調節されるか(調節されるのかどうか)を決定したことから、最終の工程は実際に、正しい調整に向けたターゲットパラメータを調節することである。ひとつの問題が、命令されるべき変化の大きさである。
【0116】
必要な調整の変化の大きさを、利用できるデータから計算することは可能ではあるが容易ではない。しかし、最適な値に近づくようにターゲットパラメータを調節する方向を決定するとは、一般的に速くかつ可能である。
【0117】
調整プロセスにある時点(たとえば、あるサイクル)で、一般的に、制御パラメータで走引される範囲と、ターゲットパラメータに対して予想される調節の補償的なスケールとの間に関係がある。この知識は外部に記憶でき、一般的にファームウエアに伝達される必要がない。したがって、一実施例では、ファームウエアに、ターゲットパラメータの所望の増加が与えられる。調整がデータ分析により示されると、ターゲットパラメータは示された方向に増加だけ調節される。
【0118】
本発明はセットした増加の使用に限定されず、より程度の高いインテリジェンスが採用されてもよい。たとえば、データ分析が、ターゲットが「十分に接近」の範囲外であることを示すときには、ターゲットパラメータの変化がより小さいことが望ましい。この評価には二つの基本的なアプローチがある。一つは、ターゲットパラメータを調節する大きさに対して異なる値をもついくつかの「ビン(bin)」をもつことであり、他のものは、大きさを計算する線形または多項関数をもつことである。必要であれば、両方法を利用してもよい。これらの方法のいずれも、正および負の変化の大きさは対称である必要はない。
【0119】
ターゲットパラメータの低レート
上記説明は、ターゲットパラメータの変化の大きさに、これらの変化が支配されるレートに関連することなく、焦点を合わせてきた。制御パラメータのように、ターゲットパラメータが調節される速度に対して上限がある。
【0120】
電源における遅延のように、時間とともに変化する効果を最少にするために、調整プロセスの間中、サイクルを続けることは制御パラメータにとって望ましい。また、不意に開始し、停止する変調波形は、位相シフトがあると、使用が不適切となろう。さらに、電源は、このような入力に満足のいくようには応答しないかもしれない。
【0121】
アルゴリズムが、ターゲットパラメータがどのように調節されなければならないかを知るために、ひとつのサイクルからの情報を利用することから、ターゲットパラメータがひとつのサイクルに一度調節されるとする。そのことがあまりにも速いと、一つの解決策は、サイクルがより長くなるように、単にサイクルを遅くすることである。遅いサイクルのひとつの不利な結果は、調整が遅くなることである。しかし、こうしたことを、速度が制限されるという理由が、ターゲットパラメータの調節速度に対する制限であるならば、採用しないとすべきではない。したがって、好適実施例では、ターゲットパラメータの調節速度に対し、独立したパラメータを含める必要はない。
【0122】
多サイクル
上記考察は、個々の調整サイクルのレベルに限定したものである。しかし、全調整は、多くのサイクルにわたる繰り返しプロセスである。サイクルレベルのパラメータは、さらに細かい細分性が使用されるとき、連続した調整の間に変化しもよい。上述したように、中央制御器30により調整命令は、PSIのファームウエアが基本的に自立している間、他サイクル調整プロセスを開始する。したがって、ファームウエアは調整の各相に対して、適切なサイクルレベルパラメータを決定する必要がある。
【0123】
好適実施例では、調整は一連の、個別の相であり、各相は入口条件、出口条件、および調整計画法に基づく。入口条件は、必要とされる「取得範囲」(ターゲット要素はある相の開始点で、どの程度悪く調整されたか)に関する。出口条件は、ある相での必要な調整精度に関する(初期の位相は次の位相の取得名範囲内にあることのみ必要とするが、最終調整は動作を満足するものでなければならない)。計画法は、入口状態から出口状態に進行するために選択されたパラメータの範囲で表現される。
【0124】
一実施例では、位相の数が少ないと予想される場合(すなわち、一つから十程度)、ファームウエアは一連のパラメータ(各相に対して一つの要素)であってもよい。
【0125】
失敗応答
時にうまくいかない調整が試みられる。システムは、失敗を検出し、第二の調整に適宜応答し、ビームが最適でないときに、失敗を中央制御器30に報告することができる。
【0126】
ビームが見出されても、調整がいくつかの理由で失敗となることがある。
1)電源が容易に安定しない。その結果、調整されたビームが、「うまいいった」調整に続いて、調整からドリフトしていく。この場合、調整プロセスは、サイクル時間を延ばすことなどによいゆっくりとなり、または変化が極端でなくなり、すなわち制御パラメータの変調の振幅は減少し、またはターゲットパラメータ調節の振幅が減少する。
2)アルゴリズムが、ある理由でビームからそれてしまうかもしれない。アルゴリズムは、細分性の今のレベルに対して「取得範囲」内にあると、一般的にビームを再度取得することが可能である。しかし、ビームが取得範囲から出て行ってしまうと、システムは、ビームが見出されないかのように反応する。
3)アルゴリズムが早めに調整が完了したと宣言してしまうかもしれない。この場合、最後の調整の繰り返しを終了するための「終了条件パラメータ」は不十分である。
4)システムは失敗ピークを見い出し、そのピークを最適することができる。
【0127】
一実施例では、予想された最少のビーム電流パラメータが、失敗のピークを見い出すこと、またはノイズ内の調整のリスクを減少させるために使用される。最少の電流パラメータは、アルゴリズムに、その種類の信号が期待されるかを示す。最少のビーム電流が検出されないと、何かが調整を妨げるのに十分に悪くなっている。装置の初期状態が、調整のアルゴリズムの「取得範囲」の外であるかもしれず、あるいはビームは単に存在していないのかもしれない。
【0128】
ビーム電流がないことに応答できるように、一実施例では、調整アルゴリズムは、この場合、広い調整走引を試みる。というのは、このタイプのエラーは一般的に、電流調整相の範囲の外にビームがあることを示すからである。このエラーがどの相でも遭遇することから、第一の調整相に単に戻ることは最も妥当なことである(ただし、非常に速い相で、これが不可能であるときを除く)。このことにより、システムは、広い範囲を捉えることができ、広い検索の間、システムの動作が適切に支配される。任意であるが、このエラーが第一の相で生じると、際だって広い範囲について、通常スキップされる「ゼロ相」が試みられる。
【0129】
他の実施例では、今のイオンビームの調整を評価する工程(図4の工程230)は、ビーム電流のリードバックのフーリエ分析からなる。制御パラメータの変調は、制御パラメータから下流のビーム電流の変調を含む。ビームラインが正しく調整されると、ビーム電流波形は、制御パラメータの変調の周波数の、規則的なピークをもつ。しかし、ビームラインが正しく調整されていないと、ビーム電流波形は、ビーム電流のリードバックの周波数スペクトル(これらピークの間の間隔により生成される高周波数成分を含む)に、不純なものを導入する「ダブルバンプ(double bump)」をもつ。これら周波数の不純なものは、ターゲットパラメータの正しくない調整を示す。これら不純なものの周波数分析は、使用される特定の波形の知識と組み合わされて、ターゲットパラメータが調整を改良するために増減すべきかどうかを決定するために使用することができる。
【0130】
調整命令
調整プロセスは、上述したように、PSIがビームを調節できるようにする、ひとつの命令を含むパラメータにより開始する。例示の調整命令において、第一のデータ構成は送信されるが、つぎのような数サイクルに対し独立したパラメータを含む。
1)最小ビーム電流
2)ターゲットパラメータ−最小値
3)ターゲットパラメータ−最大値
4)制御パラメータ−最小値
5)制御パラメータ−最大値
【0131】
さらに、六番目のパラメータとして、第一のデータ構成は各調整相に対して一つの列をもつ、一連の第二のデータ構成を含むことができる。この第二のデータ構成は、つぎのようなパラメータを含むことができる。
1)制御パラメータの変調の振幅
2)制御パラメータの変調波形のタイプ
3)制御パラメータの変調サイクル期間
4)必要な調整の符号を決定するために使用される関係の極性
5)平均したピークの中心を見出すべく、データを選択するための、平坦期の高さ閾値
6)相を終了するために、十分な調整を決定するための「十分な接近」閾値
7)極端に正のオフピーク条件に対するターゲット調節の大きさ
8)近中心条件のためのターゲット調節の大きさ
9)極端に負のオフピーク条件に対するターゲット調節の大きさ
10)うまくいったことを宣言するために、信頼性のないデータの検出のためのボーティング終了閾値
11)うまくいったことを宣言するために、「十分な接近」でなければならない試みの数
12)先の値が達成されなければならない範囲内の試みの数
【0132】
パラメータのこれらリストは全部というわけではなく、制御システムのプロトコルまたは構成、および使用された特定のハードウエハまたはファームウエアに依存して、ほかのパラメータが望まれてもよく、また必要とされてもよい。たとえば、他のパラメータが、I/Oラインを特定するために、またはハードウエアとファームウエアとの間の相互関係を柔軟にするために必要とされてもよい。
【0133】
調整確認
イオン注入に対する標準的適用例では、シリコンウエハが、イオン注入プロセスのために、ウエハ27(図1)として、ビームラインに連続して配置される。延長した時間にわたって、ビームライン要素におけるドリフトにより、正しく調整されたビームの調整が僅かに崩れる。質を確実に適正とするために、ビームの調整を周期的に評価し、他のウエハを処理する前に崩れた調整を検出することが望ましい。
【0134】
標準的なプロセスを開始することなく、ビーム調整を評価することが望ましい。ビームの評価は、ビームの調整よりも非常に素早く達成することができ、このような評価は、ウエハのスループットに影響を与えることなく、ウエハの処理の間、頻繁に達成することができる。ビームの調整が完全に崩れるときは、操作者に警告を発し、ウエハの処理を中断し、全ビーム調整手順を任意に開始することが望ましい。
【0135】
この目的のために、ビームを評価するために、完全な調整法の一部が使用できる。特に、ターゲットパラメータは、初期の値について変調され、その値を記憶するとともに、ビーム電流は制御パラメータの下流でサンプル化される。ビームが正しく調整されたことを確認するために、調整プロセスの終わりで使用される、標準ビーム評価手順は、ビームの質を評価するために使用することができる。
【0136】
図面に示され、明細書で説明された実施例の変更、修正は本発明の思想および範囲内でなし得ることは理解されよう。したがって、上記説明に含まれ、図面に示された全ての事項は説明のためであり、制限のためではない。本発明は特許請求の範囲およびその均等物によってのみ制限される。
【図面の簡単な説明】
【0137】
【図1】図1は、本発明の実施に適したイオン注入器の実施例のブロック図である。
【図2】図2は、図1のイオン注入器の制御システムの実施例のブロック図である。
【図3】図3は、図2の電源インターフェースの実施例のブロック図である。
【図4】図4は、図2の中央制御器および電源インターフェースで実行される制御プログラムの実施例の状態ブロック図である。
【図5】図5は、本発明にしたがった調整手順に関連したビームライン要素のブロック図である。
【図6】図6は、図5に示されたターゲットおよび制御要素の例の略示ブロック図である。
【図7】図7は、図6の構成における、磁場Bの関数となる、分離スリットの下流のビーム電流のグラフである。
【図8】図8は、図6の構成における、ビーム電流Eの関数となる、分離スリットの下流のビーム電流のグラフである。
【図9】図9は、本発明にしたがってターゲット要素を調整するための調整手順の例のフローチャートである。
【図10】図10は、制御パラメータが変調したときに、測定されたリードバック電圧の例を示す、時間の関数となる電圧のグラフである。
【図11】図11は、図1のイオン注入器における、第一の電源インターフェースおよび要素の第一のサブセットの実施例のブロック図である。
【図12】図12は、図11の電源インターフェースにより実行されるプログラムの実施例のフローチャートである。
【図13】図13は、図1のイオン注入器の第二の電源インターフェースおよび要素の第二のサブセットの実施例のブロック図である。
【図14】図14は、図13の電源インターフェースにより実行されるプログラムの実施例のフローチャートである。
【図15】図15は、図1のイオン注入器の第三の電源インターフェースおよび要素の第三のサブセットの実施例のブロック図である
【図16】図16は、図15の電源インターフェースにより実行されるプログラムの実施例のフローチャートである。
【図17】図17は、図1のイオン注入器の第四の電源インターフェースおよび要素の第四のサブセットの実施例のブロック図である
【図18】図18は、図17の電源インターフェースにより実行されるプログラムの実施例のフローチャートである。
【図19】図19は、いろいろなビームサイズのための開口に対してビームが偏向されたときに、ファラデーリードバック値を示す、時間の関数となる電圧のグラフである。
Claims (72)
- 荷電粒子がターゲット要素を通過して運ばれる荷電粒子ビームシステムのターゲット要素のターゲットパラメータの調整を評価する方法であって、
(a)ターゲット要素の下流に位置する制御要素の制御パラメータであって、前記制御要素に所定の関係をもつところの制御パラメータを変化させる工程と、
(b)前記制御パラメータが変化したとき、前記荷電粒子ビームの前記ターゲット要素の下流のビーム電流を測定する工程と、
(c)ビーム電流の測定およびターゲット要素と制御パラメータとの間の所定の関係に基づいて前記ターゲットパラメータの調整を評価する工程と、
を含む方法。 - 前記ターゲットパラメータの調整を評価する工程は、ビーム電流が、前記制御パラメータがその初期の値であるときに、観測された最大のビーム電流の、少なくとも所定の部分であるかどうかを決定することを含む、請求項1に記載の方法。
- さらに、所定のボーティング基準に達するまで、全ての工程を二回以上繰り返す工程を含む、請求項2に記載の方法。
- 所定のボーティング基準は、少なくとも所定の数の繰り返しで、観測された最大のビーム電流の所定の部分を越えるビーム電流からなる、請求項3に記載の方法。
- 前記ターゲットパラメータの調整の評価工程は、前記制御パラメータがその初期値の上にずれているか、またはその初期値の下にずれているのかどうかを決定することを含む、請求項1に記載の方法。
- 前記ターゲットパラメータの調整の評価工程は、ビーム電流の測定および前記ターゲット要素と前記制御パラメータの間の所定の関係に基づき、前記ターゲットパラメータから下流で測定されて最大のビーム電流となるよりも高い値または低い値に前記ターゲットパラメータが調整されたかどうかを決定することを含む、請求項1に記載の方法。
- さらに、前記ターゲットパラメータの調整の評価に基づいて前記ターゲットパラメータを調整する工程を含む、請求項1に記載の方法。
- さらに、測定したビーム電流が所定の基準を満たすまで、全ての工程を二度以上繰り返しことを含む、請求項7に記載の方法。
- 前記制御パラメータの変化の大きさは、繰り返しの間、前の繰り返しのときよりも小さい、請求項8に記載の方法。
- 前記所定の基準は、前記制御パラメータがその初期の値であるとき観測された最大のビーム電流の、少なくとも所定の一部であるビーム電流からなる、請求項8に記載の方法。
- 前記ターゲットパラメータを調節する工程は、ターゲットパラメータの調節を決定するためにビーム電流の測定値を分析する工程、および、決定されたターゲットパラメータの調節により前記ターゲットパラメータを調節する工程を含む、請求項7に記載の方法。
- 前記ビーム電流の測定値を分析する工程は、前記制御パラメータの必要な値に、ピークビーム電流をシフトするために、ターゲットパラメータの調節方向および大きさを決定する工程を含む、請求項11に記載の方法。
- 前記ターゲット要素は、電流に応答して磁場を形成する磁石からなり、前記ターゲットパラメータは前記磁石に適用される近似的な電流からなる、請求項1に記載の方法。
- 制御要素は、制御電圧に応答して電場を形成する静電要素からなり、制御パラメータを変化させる工程は制御電圧を変化させる工程からなる、請求項13に記載の方法。
- 前記制御パラメータは前記磁石への、荷電粒子ビームの近似的な入射角度からなる、請求項13に記載の方法。
- 前記制御パラメータは前記磁石への、荷電粒子ビームの近似的な入射速度からなる、請求項13に記載の方法。
- 前記ターゲット要素は質量分析器の曲げ磁石からなる、請求項13に記載の方法。
- 前記ターゲット要素は電荷状態分離磁石からなる、請求項13に記載の方法。
- 前記ターゲット要素は、前記ビームの軌道をほぼ平行な軌道に収束する平行化磁石からなる、請求項13に記載の方法。
- 前記ターゲット要素は電圧に応答して、電場を形成する静電要素からなり、前記ターゲットパラメータは前記静電要素に適用される近似的な電圧からなる、請求項1に記載の方法。
- 前記制御パラメータは前記制御要素に供給される電源出力のおおよその値からなる、請求項1に記載の方法。
- さらに、前記制御パラメータの変化の間、前記電源の出力の値を測定する工程を含む、請求項21に記載の方法。
- さらに、少なくとも観測されたピークビーム電流の所定の部分、少なくとも前記ビーム電流のひとつの測定とほぼ同時に記録された前記制御パラメータリードバック値の、少なくともひとつの測定からなるセットの最大の構成要素により境界をもつ値の範囲内で、前記電源の二次的な値を決定する工程を含む、請求項222に記載の方法。
- さらに、前記制御パラメータの変化を開始する前に公称制御パラメータのリードバック値を読み出す工程、前記電源の第二の値値と前記公称制御パラメータのリードバック値との間の符号付きの違いの所定の関数により、前記ターゲットパラメータをその初期値から調節する工程を含む、請求項23に記載の方法。
- 前記制御パラメータを変える工程は、周期的な波形で制御パラメータを変調する工程を含む、請求項1に記載の方法。
- 前記制御パラメータを変える工程は、個別の値の所定のパターンを通して、制御パラメータを段々と変える工程を含む、請求項1に記載の方法。
- 前記制御パラメータが前記制御要素に与えられる電源出力の近似的な値からなる、請求項1に記載の方法。
- 前記制御パラメータを変える工程は、各設定に応答して前記電源出力が安定化するよりも急速に個別の値の所定のパターンを通して、制御パラメータを段々と変える工程を含む、請求項27に記載の方法。
- ビーム電流を測定する工程は、前記ターゲット要素の下流に位置するファラデービーム検知器でビーム電流を測定する工程からなる、請求項1に記載の方法。
- ビーム電流を測定する工程は、前記ターゲット要素の下流に位置するパラメトリック電流変成器でビーム電流を測定する工程からなる、請求項1に記載の方法。
- ビーム電流を測定する工程は、前記制御パラメータの異なる値に対して、ビーム電流のサンプルを測定する工程からなる、請求項1に記載の方法。
- さらに、前記制御パラメータをその初期値の戻す工程を含む、請求項1に記載の方法。
- 前記制御パラメータは、前記ターゲット要素が調節に応じるよりも急速に調節に応答する、請求項1に記載の方法。
- 前記ターゲットパラメータを評価する工程は、測定されたビーム電流の波形について、フーリエ分析を実行する工程を含む、請求項1に記載の方法。
- 前記荷電粒子ビームシステムはイオン注入器からなる、請求項1に記載の方法。
- 前記荷電粒子ビームシステムは粒子加速器からなる、請求項1に記載の方法。
- 前記荷電粒子ビームシステムは質量分析器からなる、請求項1に記載の方法。
- 荷電粒子がターゲット要素を通過して運ばれる荷電粒子ビームシステムのターゲット要素のターゲットパラメータを調整する方法であって、
(a)公称ターゲットパラメータ値を決定する工程と、
(b)前記ターゲットパラメータの公称リードバック値を測定する工程と、
(c)前記公称ターゲットパラメータ値について、所定のパターンで前記ターゲットパラメータを変化させる工程と、
(d)前記荷電粒子ビームシステムの前記ターゲット要素の下流のビーム電流、および前記電源出力のターゲットパラメータリードバック値を、前記ターゲットパラメータが変化したときに、測定する工程と、
(e)少なくとも観測されたピークビーム電流の所定の部分、少なくとも前記ビーム電流のひとつの測定とほぼ同時に記録された前記ターゲットパラメータリードバック値の、少なくともひとつの測定からなるセットの最大の構成要素により境界をもつ値の範囲内で、最適なリードバック値を決定する工程と、
(f)前記公称リードバック値と前記最適なリードバック値との間の符号付きの違いの所定の関数により、公称ターゲットパラメータを調節する工程と、
(g)前記ビーム電流の測定値が所定の基準を満たすまで、少なくとも、工程(b)(c)(d)および(e)の二度以上の繰り返しを行う工程と、
を含む方法。 - 前記ターゲットパラメータの変化の大きさは、繰り返しの間、前の繰り返しのときと等しいかまたはより小さい、請求項38に記載の方法。
- 前記所定の基準は、前記最適なリードバック値と前記公称リードバック値との間の違い絶対値の大きさが、所定の閾値よりも小さいときに、少なくとも、観測された最大のビーム電流の所定の部分である、請求項38に記載の方法。
- 前記ターゲット要素は、電圧に応答して電場を形成する静電要素からなり、前記ターゲットパラメータは前記静電要素に適用される近似的な電圧からなる、請求項38に記載の方法。
- 前記ターゲットパラメータを変化する工程は、周期的な波形でターゲットパラメータを変調する工程を含む、請求項38に記載の方法。
- 前記ターゲットパラメータを変える工程は、一連の個別の値を通して、ターゲットパラメータを段々と変える工程を含む、請求項38に記載の方法。
- 前記ターゲットパラメータが前記ターゲット要素に与えられる電源出力の近似的な値からなる、請求項38に記載の方法。
- 前記ターゲットパラメータを変える工程は、各設定に応答して前記電源出力が安定化するよりも急速に、一連の個別の値の所定値を通して、ターゲットパラメータを段々と変える工程からなる、請求項44に記載の方法。
- ビーム電流を測定する工程は、前記ターゲット要素の下流に位置するファラデービーム検知器でビーム電流を測定する工程からなる、請求項38に記載の方法。
- ビーム電流を測定する工程は、前記ターゲット要素の下流に位置するパラメトリック電流変成器でビーム電流を測定する工程からなる、請求項38に記載の方法。
- ビーム電流を測定する工程は、前記ターゲットパラメータの異なる値に対して、ビーム電流のサンプルを測定する工程からなる、請求項38に記載の方法。
- 前記ターゲットパラメータを評価する工程は、測定されたビーム電流の波形について、フーリエ分析を実行する工程を含む、請求項38に記載の方法。
- 前記荷電粒子ビームシステムはイオン注入器からなる、請求項38記載の方法。
- 前記荷電粒子ビームシステムは粒子加速器からなる、請求項38に記載の方法。
- 前記荷電粒子ビームシステムは質量分析器からなる、請求項38に記載の方法。
- 荷電粒子がターゲット要素を通過して運ばれ、ターゲットパラメータが前記荷電粒子ビームの下流の焦点をおおむね決定し、前記ターゲットパラメータが、前記荷電粒子ビームシステム内で前記ターゲット要素から下流に位置するビーム電流検知装置の面において、前記荷電粒子ビームの位置を近似的に決定するところの、荷電粒子ビームシステムのターゲット要素のターゲットパラメータの調整を評価する方法であって、
(a)公称ターゲットパラメータ値を決定する工程と、
(b)前記荷電粒子ビームが交互に、前記ビーム電流検知装置に入射するように、または入射しないように、前記公称制御パラメータ値について所定のパターンで前記ターゲットパラメータを変化させる工程と、
(c)前記ターゲットパラメータが変化したとき、ビーム電流を前記ビーム電流検知装置で測定する工程と、
(d)前記荷電粒子ビームが、前記ビーム電流検知装置に入射することと入射しないこととの間の遷移のシャープ性を決定する工程と、
(e)少なくとも部分的に前記シャープ性に基づいて、前記ターゲットパラメータの調整を評価する工程と、
を含む方法。 - シャープ性を決定する工程は、前記荷電粒子ビームが前記ビーム電流検知装置の縁にわたって通過したとき、前記ターゲットパラメータの関数として、ビーム電流の導関数を決定することを含む、請求項53に記載の方法。
- 前記ターゲットパラメータの調整を評価する工程は、少なくとも前記シャープ性および観測された最大のビーム電流を入力とすることで、所定の関数を評価する工程を含む、請求項53に記載の方法。
- 前記ターゲット要素が所定の基準を満たすまで、少なくとも工程(b)、(c)、(d)および(e)の二度以上の繰り返しを行う工程を含む、請求項53に記載の方法。
- 前記制御パラメータの変化の大きさは、繰り返しの間、前の繰り返しのときと等しいかまたはより小さい、請求項56に記載の方法。
- 前記所定の基準は、前記最適なリードバック値と前記公称リードバック値との間の違いの絶対的な大きさが、所定の閾値よりも小さいときに、少なくとも、観測された最大のビーム電流の所定の部分である、請求項56に記載の方法。
- 前記ターゲット要素は、電圧に応答して電場を形成する静電要素からなり、前記ターゲットパラメータは前記静電要素に適用される近似的な電圧からなる、請求項53に記載の方法。
- 前記ターゲットパラメータを変化する工程は、周期的な波形でターゲットパラメータを変調する工程を含む、請求項53に記載の方法。
- 前記ターゲットパラメータを変える工程は、一連の個別の値を通して、ターゲットパラメータを段々と変える工程を含む、請求項53に記載の方法。
- 前記ターゲットパラメータを変える工程は、各設定に応答して前記電源出力が安定化するよりも急速に、一連の個別の値の所定値を通して、ターゲットパラメータを段々と変える工程からなる、請求項53に記載の方法。
- ビーム電流を測定する工程は、前記ターゲット要素の下流に位置するファラデービーム検出器でビーム電流を測定する工程からなる、請求項53に記載の方法。
- ビーム電流を測定する工程は、前記ターゲット要素の下流に位置するパラメトリック電流変成器でビーム電流を測定する工程からなる、請求項53に記載の方法。
- ビーム電流を測定する工程は、前記ターゲットパラメータの異なる値に対して、ビーム電流のサンプルを測定する工程からなる、請求項53に記載の方法。
- 前記荷電粒子ビームシステムはイオン注入器からなる、請求項53記載の方法。
- 前記荷電粒子ビームシステムは粒子加速器からなる、請求項53に記載の方法。
- 荷電粒子がターゲット要素を通過して運ばれる荷電粒子ビームシステムのターゲット要素のターゲットパラメータの調整を評価する装置であって、
(a)ターゲット要素の下流に位置する制御要素の制御パラメータであって、前記制御要素に所定の関係をもつところの制御パラメータを変化させる手段と、
(b)前記制御パラメータが変化したとき、前記荷電粒子ビームの前記ターゲット要素の下流のビーム電流を測定する手段と、
(c)ビーム電流の測定およびターゲット要素と制御パラメータとの間の所定の関係に基づいて前記ターゲットパラメータの調節を評価する手段と、
を含む装置。 - 荷電粒子ビーム装置であって、
ターゲットパラメータにより制御されるターゲット要素と、
制御パラメータにより制御され、ターゲット要素の下流に位置する制御要素と、
制御要素およびターゲット要素を通過して運ばれる荷電粒子ビームを検知するための、ターゲット要素の下流に位置するビーム検出器と、
制御パラメータを変化するため、およびターゲット要素と制御パラメータとの間の所定の関係に基づいてビーム検出器から受信したビーム電流の測定に応答してターゲットパラメータの調整を評価するための制御器と、
を含む装置。 - 荷電粒子ビームシステムであって、
荷電粒子が運ばれて通過する、ひとつ以上のビームライン要素と、
該システムを制御する中央制御器と、
前記中央制御器からの調整命令に応答して、前記ひとつ以上のビームライン要素のうちの選択されたひとつを自動的に調整するための、調整アルゴリズムを含む、少なくともひとつの局所制御器と、
を含む装置。 - 荷電粒子ビームの焦点を調節する方法であって、
(a)開口の縁を横切る荷電粒子を偏向する工程と、
(b)ビームが開口の縁を横切って偏向したときに、開口の下流のビーム電流の変化割合を決定する工程と、
(c)荷電粒子ビームの異なる焦点設定のために、工程(a)および(b)を繰り返す工程と、
(d)ビームが開口の縁を横切って偏向したとき、開口の下流のビーム電流の変化の最も高い割合を与える焦点設定を選択する工程と、
を含む方法。 - 荷電粒子ビームが運ばれて通過する複数のビームライン要素、中央制御器、および前記ビームライン要素のそれぞれを制御するひとつ以上の電源制御器を含む荷電粒子ビームシステムにおいて、
前記中央制御器が前記電源の制御器のうち選択された一つに調整命令を送り、
前記選択された電源制御器が調整命令に応答して調整アルゴリズムを自動的に実行すること含む、調整方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/943,625 US7282721B2 (en) | 2001-08-30 | 2001-08-30 | Method and apparatus for tuning ion implanters |
| PCT/US2002/021751 WO2003021630A1 (en) | 2001-08-30 | 2002-07-10 | Method and apparatus for tuning ion implanters |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005502174A true JP2005502174A (ja) | 2005-01-20 |
| JP2005502174A5 JP2005502174A5 (ja) | 2006-01-05 |
Family
ID=25479965
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003525879A Pending JP2005502174A (ja) | 2001-08-30 | 2002-07-10 | イオン注入器を調整する方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7282721B2 (ja) |
| EP (1) | EP1421598A1 (ja) |
| JP (1) | JP2005502174A (ja) |
| KR (1) | KR20040029140A (ja) |
| CN (1) | CN100456416C (ja) |
| TW (1) | TW571351B (ja) |
| WO (1) | WO2003021630A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007538383A (ja) * | 2003-11-03 | 2007-12-27 | アドバンスト・マイクロ・ディバイシズ・インコーポレイテッド | イオン注入プロセスの欠陥検出および制御方法、およびその実行システム |
| JP2016526254A (ja) * | 2013-05-03 | 2016-09-01 | ヴァリアン セミコンダクター イクイップメント アソシエイツ インコーポレイテッド | イオン注入均一性を制御するための装置及び技術 |
| US10121666B2 (en) | 2015-12-10 | 2018-11-06 | Sumitomo Heavy Industries Ion Technology Co., Ltd. | Ion implantation method and ion implantation apparatus |
| US10453689B2 (en) | 2016-03-18 | 2019-10-22 | Sumitomo Heavy Industries Ion Technology Co., Ltd. | Ion implantation method and ion implantation apparatus |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2432039B (en) * | 2004-01-09 | 2009-03-11 | Applied Materials Inc | Improvements relating to ion implantation |
| US6903350B1 (en) * | 2004-06-10 | 2005-06-07 | Axcelis Technologies, Inc. | Ion beam scanning systems and methods for improved ion implantation uniformity |
| US7442944B2 (en) * | 2004-10-07 | 2008-10-28 | Varian Semiconductor Equipment Associates, Inc. | Ion beam implant current, spot width and position tuning |
| US6992311B1 (en) * | 2005-01-18 | 2006-01-31 | Axcelis Technologies, Inc. | In-situ cleaning of beam defining apertures in an ion implanter |
| US7397047B2 (en) * | 2005-05-06 | 2008-07-08 | Varian Semiconductor Equipment Associates, Inc. | Technique for tuning an ion implanter system |
| KR100755069B1 (ko) * | 2006-04-28 | 2007-09-06 | 주식회사 하이닉스반도체 | 불균일한 이온주입에너지를 갖도록 하는 이온주입장치 및방법 |
| GB2438893B (en) * | 2006-06-09 | 2010-10-27 | Applied Materials Inc | Ion beams in an ion implanter |
| US7227160B1 (en) * | 2006-09-13 | 2007-06-05 | Axcelis Technologies, Inc. | Systems and methods for beam angle adjustment in ion implanters |
| US20080245957A1 (en) * | 2007-04-03 | 2008-10-09 | Atul Gupta | Tuning an ion implanter for optimal performance |
| CN102347193B (zh) * | 2010-08-02 | 2015-09-30 | 北京中科信电子装备有限公司 | 一种大角度离子注入机快速调束的优化算法 |
| US9234932B2 (en) * | 2013-03-13 | 2016-01-12 | Thermo Finnigan Llc | Method and apparatus for monitoring ion lens connections |
| US9870896B2 (en) * | 2013-12-06 | 2018-01-16 | Taiwan Semiconductor Manufacturing Co., Ltd. | System and method for controlling ion implanter |
| US9423635B1 (en) * | 2014-01-31 | 2016-08-23 | The University Of Toledo | Integrated magneto-optic modulator/compensator system, methods of making, and methods of using the same |
| US10515780B1 (en) * | 2018-12-19 | 2019-12-24 | Axcelis Technologies, Inc. | System and method of arc detection using dynamic threshold |
| CN111175569B (zh) * | 2020-02-20 | 2021-11-05 | 中国科学院上海应用物理研究所 | 一种基于宽带串行化的极窄束流信号峰值幅度提取方法 |
| JP2022122112A (ja) * | 2021-02-09 | 2022-08-22 | 住友重機械イオンテクノロジー株式会社 | イオン注入装置およびイオン注入方法 |
| CN113571401A (zh) * | 2021-07-19 | 2021-10-29 | 广州粤芯半导体技术有限公司 | 狭缝组件及离子注入机台 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4595837A (en) * | 1983-09-16 | 1986-06-17 | Rca Corporation | Method for preventing arcing in a device during ion-implantation |
| US5653811A (en) * | 1995-07-19 | 1997-08-05 | Chan; Chung | System for the plasma treatment of large area substrates |
| CN1155152A (zh) * | 1995-12-11 | 1997-07-23 | 株式会社日立制作所 | 带电粒子束装置及其操作方法 |
| JPH10134745A (ja) | 1996-10-29 | 1998-05-22 | Jeol Ltd | 電子ビームの電流密度制御方法および装置 |
| US5861632A (en) * | 1997-08-05 | 1999-01-19 | Advanced Micro Devices, Inc. | Method for monitoring the performance of an ion implanter using reusable wafers |
| US6137112A (en) | 1998-09-10 | 2000-10-24 | Eaton Corporation | Time of flight energy measurement apparatus for an ion beam implanter |
| BE1012358A5 (fr) * | 1998-12-21 | 2000-10-03 | Ion Beam Applic Sa | Procede de variation de l'energie d'un faisceau de particules extraites d'un accelerateur et dispositif a cet effet. |
| US7309997B1 (en) | 2000-09-15 | 2007-12-18 | Varian Semiconductor Equipment Associates, Inc. | Monitor system and method for semiconductor processes |
| US6774378B1 (en) * | 2003-10-08 | 2004-08-10 | Axcelis Technologies, Inc. | Method of tuning electrostatic quadrupole electrodes of an ion beam implanter |
-
2001
- 2001-08-30 US US09/943,625 patent/US7282721B2/en active Active
-
2002
- 2002-07-10 JP JP2003525879A patent/JP2005502174A/ja active Pending
- 2002-07-10 KR KR10-2004-7003143A patent/KR20040029140A/ko not_active Application Discontinuation
- 2002-07-10 WO PCT/US2002/021751 patent/WO2003021630A1/en not_active Application Discontinuation
- 2002-07-10 CN CNB028185714A patent/CN100456416C/zh not_active Expired - Fee Related
- 2002-07-10 EP EP02749890A patent/EP1421598A1/en not_active Withdrawn
- 2002-07-16 TW TW091115804A patent/TW571351B/zh not_active IP Right Cessation
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007538383A (ja) * | 2003-11-03 | 2007-12-27 | アドバンスト・マイクロ・ディバイシズ・インコーポレイテッド | イオン注入プロセスの欠陥検出および制御方法、およびその実行システム |
| JP2016526254A (ja) * | 2013-05-03 | 2016-09-01 | ヴァリアン セミコンダクター イクイップメント アソシエイツ インコーポレイテッド | イオン注入均一性を制御するための装置及び技術 |
| JP2016526253A (ja) * | 2013-05-03 | 2016-09-01 | ヴァリアン セミコンダクター イクイップメント アソシエイツ インコーポレイテッド | イオン注入均一性を制御するための装置及び技術 |
| US10121666B2 (en) | 2015-12-10 | 2018-11-06 | Sumitomo Heavy Industries Ion Technology Co., Ltd. | Ion implantation method and ion implantation apparatus |
| US10453689B2 (en) | 2016-03-18 | 2019-10-22 | Sumitomo Heavy Industries Ion Technology Co., Ltd. | Ion implantation method and ion implantation apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100456416C (zh) | 2009-01-28 |
| EP1421598A1 (en) | 2004-05-26 |
| CN1557012A (zh) | 2004-12-22 |
| US20030042427A1 (en) | 2003-03-06 |
| WO2003021630A1 (en) | 2003-03-13 |
| TW571351B (en) | 2004-01-11 |
| US7282721B2 (en) | 2007-10-16 |
| KR20040029140A (ko) | 2004-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005502174A (ja) | イオン注入器を調整する方法および装置 | |
| US8692216B2 (en) | Ion implantation apparatus and control method thereof | |
| JP7050053B2 (ja) | 走査イオン注入システムにおけるインサイチュでのイオンビーム電流の監視および制御 | |
| US8258475B2 (en) | Charged particle radiation device provided with aberration corrector | |
| JP6379182B2 (ja) | イオン注入均一性を制御するための装置及び技術 | |
| KR101380149B1 (ko) | 이온 주입기를 위한 패러데이 컵의 자기적 모니터링 | |
| US9905397B2 (en) | Ion implantation apparatus and scanning waveform preparation method | |
| KR100883238B1 (ko) | 이온 주입기에서의 주사 빔 균일성 조절을 위한 방법 및장치 | |
| US7723706B2 (en) | Horizontal and vertical beam angle measurement technique | |
| US7547460B2 (en) | Ion implanter optimizer scan waveform retention and recovery | |
| US7189980B2 (en) | Methods and systems for optimizing ion implantation uniformity control | |
| US20170047210A1 (en) | Quantitative measurements of elemental and molecular species using high mass resolution mass spectrometry | |
| JP4752138B2 (ja) | 荷電粒子線調整方法及び荷電粒子線装置 | |
| CN116888707A (zh) | 嵌套的静电线性离子阱和操作其的方法 | |
| CN111263972B (zh) | 监测离子束的装置、控制离子束的装置及方法 | |
| US20230140499A1 (en) | Ion implantation method, ion implanter, and method for manufacturing semiconductor device | |
| JPH06310082A (ja) | イオン注入装置におけるビーム軌道の復元方法 | |
| US20230057995A1 (en) | Fast beam calibration procedure for beamline ion implanter | |
| JP2720651B2 (ja) | イオン注入装置 | |
| JPH04268743A (ja) | 電子ビーム装置 | |
| JPH0774071A (ja) | 荷電粒子ビーム露光装置及び荷電粒子ビーム露光方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20050711 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050711 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050711 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071107 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080612 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090106 |