JP2005321663A - トーションバーを用いた静電駆動型マイクロミラーデバイス - Google Patents
トーションバーを用いた静電駆動型マイクロミラーデバイス Download PDFInfo
- Publication number
- JP2005321663A JP2005321663A JP2004140525A JP2004140525A JP2005321663A JP 2005321663 A JP2005321663 A JP 2005321663A JP 2004140525 A JP2004140525 A JP 2004140525A JP 2004140525 A JP2004140525 A JP 2004140525A JP 2005321663 A JP2005321663 A JP 2005321663A
- Authority
- JP
- Japan
- Prior art keywords
- torsion bar
- mirror
- micromirror
- electrostatically driven
- tension
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Mechanical Light Control Or Optical Switches (AREA)
- Micromachines (AREA)
Abstract
MEMSによって製作されるマイクロミラーデバイスは、低電圧駆動で、大きな回転角を得ることを求められるので、ミラーを支えるトーションバーを柔らかくするようにしているが、ミラー回転以外の変位も発生し易くなる。この変位は、デバイスの動作範囲を制限するため、大きなミラー回転角を得ることが困難であった。
【解決手段】 本発明はトーションバーに張力を加えることによって、回転方向に比較して上下左右方向の剛性を高めることで、問題を解決したものである。引っ張り応力を加える方法は、引張応力の入ったシリコン窒化膜の薄膜でトーションバーを形成する方法、トーションバーに応力が加わっていない状態で微細加工を施し、イオンやラジカルを照射することでトーションバーに応力を発生させ、合力としてトーションバーに沿った張力を発生させる方法、等の各種の手法を適用することが出きる
【選択図】 図1
Description
本発明のトーションバーを用いた静電駆動型マイクロミラーデバイスは、従来のポリゴンミラーなどの大きな体積を持った光走査デバイス等に置き換わるものである。
従来MEMSを用いて製作されていた光走査デバイスにはトーションバーによりマイクロミラーを支持して静電駆動によりミラーを回転走査させるようにしたものがある。
図8はMEMSを用いて製作された従来の静電駆動型マイクロミラーの概略図で,(a)は平板電極の例を示し、(b)は櫛歯電極の例を示す。
図8において、10はマイクロミラー、21,22はマイクロミラー10を支持するトーションバーである。
このような構成の静電駆動型マイクロミラーにおいては、マイクロミラー10を駆動するために、マイクロミラー10と下部電極30の間に電圧を加えると、マイクロミラー10と下部電極30との間に引力が働く。
MEMSを用いて製作された従来の静電駆動型マイクロミラーは通常、低消費電力、既設設備の電源(5Vもしくは12V)で駆動できることが求められるため、ミラーの駆動方式として静電アクチュエータが採用されており、マイクロミラー10に大きな回転角を得るために、トーションバーの材料を柔らかいものに替えたり、図10に示すようにトーションバー21,22の形状に何度も曲がりくねりを入れたミリンダリング状トーションバーを使用して回転に対する剛性を下げるようにしていた。
このような構成の静電駆動型マイクロミラーでは、ミラー10はトーションバー21,22から見て、回転トルクのみならず、図中の下部電極30の方向の下向きの力を受けることになるので、ミラー10には上下方向変位が発生する。
また、静電引力はマイクロミラー10と下部電極30の間のわずかな距離の差であっても、生じる引力に大きな違いを生むため、幾何学的なマイクロミラー10の配置を回転に対して対称として上下方向の力のバランスを取ろうとしても実際にはアンバランスが残るため、上下方向変位を除去することは困難である。
図8の(b)の櫛歯電極型電極を使用した静電駆動型マイクロミラーでは、櫛歯電極30は櫛歯周りの静電引力が面内方向ではバランスして打ち消しあうために、正味上下方向だけの力が残るように構成されているが、実際には面内方向間隔に僅かな誤差があるため、駆動電圧を上げた際にアンバランスに対してトーションバーが面内のミラーの回転を抑えきれないことが生じる。
このため従来のMEMSを用いて製作された静電駆動型マイクロミラーにおいては、回転角を大きくするためにトーションバー材料を柔らかいものに替えたり、トーションバー形状に何度も曲がりくねりを入れたりして小さな力でも大きな回転角が得られるようにしているが、回転に対する剛性が下がるため上下方向のばね定数も小さくなり、ミラーの上下左右方向の剛性も落ちてしまうために、静電アクチュエータの駆動電圧が高くなるとPPull−inが生じ、ミラーが下方へ引き込まれ、幾何学的に回転が許されず、ダイナミックレンジが取れないため、ミラーの回転角が大きく取れない問題がある。
大きなミラー回転角を安定に得るには、静電駆動型マイクロミラーのミラーを支えるトーションバーの剛性を高め堅牢な構成にすることが必要であるが、トーションバーを堅牢な構成にすると、消費電力の少ない静電駆動デバイスにおいては駆動電圧が高くなってしまうことが技術的な課題として存在しており、決定的な解決策は未だ得られていない。
トーションバーに張力を加える方法としては、トーションバーに引張応力の入ったシリコン窒化膜の薄膜でトーションバーを形成する方法、トーションバーに応力が加わっていない状態で微細加工を施し、熱的な変形や、イオンやラジカルを照射することでトーションバーに応力を発生させ、合力としてトーションバーに沿った張力を発生させる方法、等の各種の手法を適用することが出きる。
図1は、本発明のトーションバーを用いた静電駆動型マイクロミラーデバイスの動作を説明する概略図で、(a)は平板電極の例を示し、(b)は櫛歯電極の例を示したものである。
図1において、10はマイクロミラー、21,22はマイクロミラー10を支持するトーションバーである。マイクロミラー10とトーションバー21,22はMEMSを用いて一体に形成される。
30はマイクロミラー10を駆動する駆動電極である。駆動電極30はマイクロミラー10と対向した位置に配置されるが、レイアウトの制限から、ミラーの一方にのみ駆動電極を用意することが多い。
マイクロミラー10と駆動電極30との間に駆動電圧を加えると、静電吸引力が働きトーションバー21,22に支持されたマイクロミラー10が回転する。
マイクロミラー10の回転角は、駆動電圧が一定であれば、トーションバー21,22のねじりこわさにより決まり、ねじりこわさが小さいほど回転角は大きくなる。
ねじりこわさ=kGab3‥…(1)
kは、長辺aと短辺bとの比により計算される係数である。
式(1)より、ねじりこわさを小さくするためには、3乗で作用している短辺bを小さくすることが有利であることがわかる。
トーションバーの短辺bを小さくするとねじりこわさを小さくすることができるが、上下方向のばね定数が低下するため、本発明は、静電駆動型マイクロミラーを引張応力を持った状態のトションバーでミラーを支持することによりミラーの上下方向の運動を抑制するようにしたものである。引張応力の存在によりトーションバーは上下方向のばね定数は、3桁増加し、ミラーが下方へ引き込まれる量は抑えられる。
一方、トーションバーが引張応力を持っと、ねじりこわさが増加するが、その増加する割合は3割程度であり、引張応力により得られるる利点の方がはるかに大きく、引張応力を持つトーションバーは低電圧駆動で、大きなミラー回転角を得るために有効であることがわかる。
マイクロミラー10を回転駆動させるために、マイクロミラー10と駆動電極30に電圧を加えると、マイクロミラー10と駆動電極30との間に静電引力が働く。
この場合に、ミラー10に加わる力はトーションバー21,22から見て、回転トルクのみならず、図中の下向きの力F2を受けることになり、ミラー10の上下方向変位は不可避となる。下方向の変位は、ミラー回転を許す幾何学的なスペースを減少させてしまうこともあり、得られる回転角を減らしてしまう。
また、静電引力はマイクロミラー10と駆動電極30の間のわずかな距離の差であっても、生じる引力に大きな違いを生むため、例え幾何学的な配置を回転に対して対称として上下方向の力のバランスを取ろうとしても現実にはアンバランスが残るので、上下方向変位は不可避である。
トーションバー21,22には張力F1が加えられているので、下向きの力F2を受けると上向きの力F3が合成される。これがミラーを上下方向に支える力になり、上下方向変位が抑制される。
櫛歯電極は櫛歯周りの静電引力が面内方向ではバランスして打ち消しあうために、正味上下方向だけの力が残る。しかし、現実には面内方向間隔に僅かな誤差があるため、駆動電圧を上げた際にアンバランスに対してトーションバーが面内のミラー回転を抑えきれないことが生じる。
静電引力がちょっとしたアンバランスをもつと、ミラー部が面内で回転し、事実上、回転角の上限を決める原因となる。この場合にも、トーションバーが変形した際に、引っ張り力F1がミラーを元の配置に戻すように、力F3が合成され櫛歯同士のスティッキングやショート等が抑制される。
静電駆動型マイクロミラーデバイスのトーションバーに張力を持たせる方法は、現在使用されている各種の方法により実施することが可能である。
以下に張力を持つトーションバーの具体的な製作方法の各種の実施例について説明する。
具体的には、CVD成膜の際に、膜応力が引っ張り条件になるようにしておいて、トーションバー状にパターニングした上で下地のシリコンを取り除くことにより形成する。
例えば、幅4μm, 厚さ0.3μm, 長さ200 μmのシリコン窒化膜からなるトーションバーに600Mpaほどの引っ張り応力を入れることが可能である。これにより上下方向のバネ定数を3桁増加できる。ねじれ方向のバネ定数は3割程度の増加である。
デバイス層シリコン:10μm、埋め込み酸化膜:2μm、ハンドリング層シリコン200μmのSOIウェハを1100℃で8時間ウェット酸化し、ウェハの表面に酸化膜を形成したものを素材として使用し、次の(a)から(j)の工程により製作が行われる。
成膜された酸化膜は平均1.7μmである。
(a)このSOIウェハの酸化膜をパターニングすることにより引張応力の入ったシリコン窒化膿を減圧CVDで500nm成膜する。
(b)裏面のハンドリング層シリコンを埋め込み酸化膜までKOHでエッチングして、表面の窒化膜に電極用コンタクトホールをエッチングする。
これは、トーションバーが窒化膜で絶縁物であるため、電気的な接続が取れないのに対して、後から成膜するAu/Cr膜を介した接続を可能とするためである。
(c)その後トーションバー付近のシリコン窒化膜を200nmエッチングを施しレジストを剥離する。
(e)Au/Crをマスクとし緩衝フッ酸により2μmのSiO2を1μmに薄くする。
これは、後に述ペるように犠牲層エッチングを行う際に、ミラー部が先にリリースされることを狙ったものである。
(g)その後、Au/Crをエッチングにより除去し、櫛歯および全体の形状を決めるレイヤのパターニングを行う。
(h)ICP-RIEでシリコン窒化膜をエッチングしトーションバー付近のシリコンのみを露出させる。この時点では、櫛歯付近のシリコン窒化膜は厚さ200nm弱残っている。その後、ICP-RIEによりSF6ガスのみを用いた等方性の条件でトーションバー下部のシリコンがなくなるようにサイドエッチングを入れ、シリコン窒化膜のみの中空構造にする。これが、トーションバーとなる。
櫛歯付近にはシリコン窒化膜が残っているため、エッチングが行われず、トーションバー付近のみを等方性の条件でエッチングすることが可能となっている。
シリコンとシリコン窒化膜のエッチング選択比は140以上であり、シリコンとシリコン窒化膜を選択的にエッチングすることが可能であった。
(i)次に、残していた窒化膜を再びエッチングし櫛歯付近などのシリコン部分を露出させ、Deep RIE により垂直にエッチングし、櫛歯を形成する。
(j)電極用のAu/Crを斜めから蒸着させる。最後にフッ酸蒸気を用い、埋め込み酸化膜をドライエッチングしリリースとなる 。
上記の(e)の工程で埋め込み酸化膜に膜厚差を設けることにより、リリースの工程(j)において、埋め込み酸化膜の薄いミラー、櫛歯部分を早くリリースさせ、固定櫛歯が反ることからミラー部を切り離し、ミラーを安全にリリースさせることが出来る。
図3に示すように、温度850℃で、SiH2Cl2ガス/NH3ガスの混合比を0.5にすると引っ張り応力60Kgf/mm2=600MPaが得られる。混合比を5.3にすると応力をほぼ0にすることもできる。従って、シリコン窒化膜を利用して張力の含まれたトーションバーも、張力0のトーションバーも製作することができる。
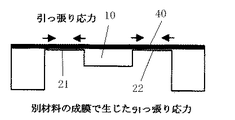
図4において、10はマイクロミラー、21,22はマイクロミラー10を支持するトーションバーである。40はトーションバー21,22の表面にスパッタ蒸着したクロム膜である。
スパッタ蒸着したクロム膜には強い引っ張り応力が含まれることが知られている。予め張力0のトーションバーを製作した場合、又は他の方法で製作したトーションバーには張力を持っていない場合には、図4に示すような電気的接続を得るために後で金属蒸着するクロム膜を利用することで引張応力を得ることができる。
膜応力にはよらずに、製作したシリコン構造体を変形することで、製作後に張力を加えることもできる。
図5において、10はマイクロミラー、21,22はマイクロミラー10を支持するトーションバーである。
図5の実施例では、(a)に示すように、トーションバー21,22をシリコンの2本の梁で製作しておき、(b)(c)に示すように、製作後に通電過熱によって熱的に変形・接触して一体化した後に、(d)に示すように、室温まで冷すことで、トーションバーに張力を生じさせることができる。トーションバーそのものでなくても、周辺構造を変形させて同等の効果を得ることが可能である。
図6において、10はマイクロミラー、21,22はマイクロミラー10を支持するトーションバーである。
図6の実施例では、(a)に示すように、トーションバー21,22をシリコンの2本の梁で製作しておき、(b)に示すように、外側からイオンやラジカルを照射して、圧縮応力を発生させ、(c)に示すように、合力としてトーションバーに張力応力を生じさせることができる。
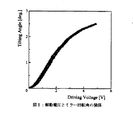
図7のデータは、繰り返し精度を評価するため、初めに計測した結果と、周波数2Hzで1時間(7200cycle)駆動した直後に計測したものを示す。
駆動電圧5Vで2.5°の回転角が得られた。その際には下に引き込まれたミラー変位は100nm以下であることが確認された。面内方向の回転は観察されなかった。
21,22・・・マイクロミラー10を支持するトーションバー,
30・・・マイクロミラー10を駆動する駆動電極,
40・・・トーションバー21,22の表面にスパッタ蒸着したクロム膜,
Claims (6)
- マイクロミラーと一体に形成され該マイクロミラーを回転可能に支持するトーションバーを用いた静電駆動型マイクロミラーデバイスにおいて、
前記トーションバーに張力を持たせてミラーを支持させることにより、回転方向に柔らかく上下左右方向には剛性を高くして、安定にミラーの回転動作が得られるようにしたことを特徴とするトーションバーを用いた静電駆動型マイクロミラーデバイス。 - マイクロミラーと一体に形成され該マイクロミラーを回転可能に支持するトーションバーを用いた静電駆動型マイクロミラーデバイスにおいて、
前記トーションバーに引っ張り応力を利用することで張力を持たせてミラーを支持させることにより、回転方向に柔らかく上下左右方向には剛性を高くして、安定にミラーの回転動作が得られるようにしたことを特徴とするトーションバーを用いた静電駆動型マイクロミラーデバイス。 - マイクロミラーと一体に形成され該マイクロミラーを回転可能に支持するトーションバーを用いた静電駆動型マイクロミラーデバイスにおいて、
前記トーションバーに引っ張り応力を持つよう成膜条件を制御した薄膜を利用することで張力を持たせてミラーを支持させることにより、回転方向に柔らかく上下左右方向には剛性を高くして、安定にミラーの回転動作が得られるようにしたことを特徴とするトーションバーを用いた静電駆動型マイクロミラーデバイス。 - マイクロミラーと一体に形成され該マイクロミラーを回転可能に支持するトーションバーを用いた静電駆動型マイクロミラーデバイスにおいて、
前記トーションバーに応力が加わっていない状態で微細加工を施した後、トーションバーの部分に張力を持った膜を蒸着することにより張力を持たせてミラーを支持させることにより、回転方向に柔らかく上下左右方向には剛性を高くして、安定にミラーの回転動作が得られるようにしたことを特徴とするトーションバーを用いた静電駆動型マイクロミラーデバイス。 - マイクロミラーと一体に形成され該マイクロミラーを回転可能に支持するトーションバーを用いた静電駆動型マイクロミラーデバイスにおいて、
前記トーションバーに応力が加わっていない状態で微細加工を施し、熱処理によってトーションバーを変形させ、変形後に室温でトーションバーに沿った張力を発生させることにより、張力を持たせてミラーを支持させることにより、回転方向に柔らかく上下左右方向には剛性を高くして、安定にミラーの回転動作が得られるようにしたことを特徴とするトーションバーを用いた静電駆動型マイクロミラーデバイス。 - マイクロミラーと一体に形成され該マイクロミラーを回転可能に支持するトーションバーを用いた静電駆動型マイクロミラーデバイスにおいて、
前記トーションバーに応力が加わっていない状態で微細加工を施し、イオンやラジカルを照射することでトーションバーに応力を発生させ、合力としてトーションバーに沿った張力を発生させることにより、張力を持たせてミラーを支持させることにより、回転方向に柔らかく上下左右方向には剛性を高くして、安定にミラーの回転動作が得られるようにしたことを特徴とするトーションバーを用いた静電駆動型マイクロミラーデバイス。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004140525A JP4446038B2 (ja) | 2004-05-11 | 2004-05-11 | トーションバーを用いた静電駆動型マイクロミラーデバイス |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004140525A JP4446038B2 (ja) | 2004-05-11 | 2004-05-11 | トーションバーを用いた静電駆動型マイクロミラーデバイス |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005321663A true JP2005321663A (ja) | 2005-11-17 |
| JP4446038B2 JP4446038B2 (ja) | 2010-04-07 |
Family
ID=35468997
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004140525A Expired - Lifetime JP4446038B2 (ja) | 2004-05-11 | 2004-05-11 | トーションバーを用いた静電駆動型マイクロミラーデバイス |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4446038B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008055516A (ja) * | 2006-08-29 | 2008-03-13 | Fujitsu Ltd | マイクロ揺動素子 |
| JP2008292451A (ja) * | 2007-01-19 | 2008-12-04 | Stmicroelectronics Srl | 酸素吸収剤及び耐膨潤性、耐剥離性及び表面平滑性に優れた脱酸素性容器 |
| US7564890B2 (en) | 2005-12-20 | 2009-07-21 | Denso Corporation | Laser equipment |
| JP2011521797A (ja) * | 2008-05-29 | 2011-07-28 | フリースケール セミコンダクター インコーポレイテッド | パッケージ応力を補償する応力逃がしを有する容量性センサ |
| JP2012115981A (ja) * | 2011-12-09 | 2012-06-21 | Fujitsu Ltd | マイクロ揺動素子 |
| US9834437B2 (en) | 2014-12-02 | 2017-12-05 | Csmc Technologies Fabi Co., Ltd. | Method for manufacturing MEMS torsional electrostatic actuator |
| EP3919436A1 (en) | 2020-06-03 | 2021-12-08 | Funai Electric Co., Ltd. | Vibrating element |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110849507A (zh) * | 2019-11-20 | 2020-02-28 | 清华大学 | Mems中的薄膜应力检测结构及其制备方法 |
-
2004
- 2004-05-11 JP JP2004140525A patent/JP4446038B2/ja not_active Expired - Lifetime
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7564890B2 (en) | 2005-12-20 | 2009-07-21 | Denso Corporation | Laser equipment |
| US7843987B2 (en) | 2005-12-20 | 2010-11-30 | Denso Corporation | Laser equipment |
| JP2008055516A (ja) * | 2006-08-29 | 2008-03-13 | Fujitsu Ltd | マイクロ揺動素子 |
| JP2008292451A (ja) * | 2007-01-19 | 2008-12-04 | Stmicroelectronics Srl | 酸素吸収剤及び耐膨潤性、耐剥離性及び表面平滑性に優れた脱酸素性容器 |
| US8661900B2 (en) | 2007-01-19 | 2014-03-04 | Stmicroelectronics S.R.L. | Z-axis microelectromechanical device with improved stopper structure |
| JP2011521797A (ja) * | 2008-05-29 | 2011-07-28 | フリースケール セミコンダクター インコーポレイテッド | パッケージ応力を補償する応力逃がしを有する容量性センサ |
| JP2012115981A (ja) * | 2011-12-09 | 2012-06-21 | Fujitsu Ltd | マイクロ揺動素子 |
| US9834437B2 (en) | 2014-12-02 | 2017-12-05 | Csmc Technologies Fabi Co., Ltd. | Method for manufacturing MEMS torsional electrostatic actuator |
| EP3919436A1 (en) | 2020-06-03 | 2021-12-08 | Funai Electric Co., Ltd. | Vibrating element |
| US11921283B2 (en) | 2020-06-03 | 2024-03-05 | Funai Electric Co., Ltd. | Vibrating element |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4446038B2 (ja) | 2010-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3065611B1 (ja) | マイクロミラ―装置およびその製造方法 | |
| JP5313666B2 (ja) | Mems装置、光制御方法及びミラー形成方法 | |
| JP4401442B2 (ja) | マイクロメカニカル式の装置のための製造方法 | |
| JP4206102B2 (ja) | 垂直くし型電極を具備したアクチュエータ | |
| JP4385938B2 (ja) | アクチュエータ | |
| US20050099665A1 (en) | Frequency tunable resonant scanner | |
| US6679995B1 (en) | Method of micromechanical manufacturing of a semiconductor element, in particular an acceleration sensor | |
| JP2012528343A (ja) | マイクロマシニング型の構成素子及び該マイクロマシニング型の構成素子の製造方法 | |
| US6838304B2 (en) | MEMS element manufacturing method | |
| US7042613B2 (en) | Bouncing mode operated scanning micro-mirror | |
| JP4446038B2 (ja) | トーションバーを用いた静電駆動型マイクロミラーデバイス | |
| Chollet et al. | A (not so) short introduction to Micro Electro Mechanical Systems | |
| JP2016114798A (ja) | 光偏向器及び光偏向器の製造方法 | |
| CN101279712B (zh) | 生成微机械结构的方法 | |
| Jeong et al. | A novel microfabrication of a self-aligned vertical comb drive on a single SOI wafer for optical MEMS applications | |
| JP7386625B2 (ja) | 光偏向器の製造方法及び光偏向器 | |
| JP2005506909A (ja) | 補強面微細加工構造物およびその製造方法 | |
| US7261825B2 (en) | Method for the production of a micromechanical device, particularly a micromechanical oscillating mirror device | |
| TW200925104A (en) | MEMS scanning micromirror manufacturing method | |
| CN103018895A (zh) | 一种表面微机械加工的模拟微镜 | |
| JP7105934B2 (ja) | Memsミラー装置及びその製造方法 | |
| TWI249506B (en) | Optical micro-electromechanical device and its manufacturing method | |
| Sasaki et al. | Performance of tense thin-film torsion bar for large rotation and low-voltage driving of micromirror | |
| JP7073876B2 (ja) | 半導体装置およびその製造方法 | |
| JP2001001300A (ja) | 微細梁構造およびその製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070508 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090811 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091201 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4446038 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| EXPY | Cancellation because of completion of term |