JP2005299844A - ハイブリッド車のモード遷移制御装置 - Google Patents
ハイブリッド車のモード遷移制御装置 Download PDFInfo
- Publication number
- JP2005299844A JP2005299844A JP2004119095A JP2004119095A JP2005299844A JP 2005299844 A JP2005299844 A JP 2005299844A JP 2004119095 A JP2004119095 A JP 2004119095A JP 2004119095 A JP2004119095 A JP 2004119095A JP 2005299844 A JP2005299844 A JP 2005299844A
- Authority
- JP
- Japan
- Prior art keywords
- mode
- low
- driving force
- mode transition
- transition control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Hybrid Electric Vehicles (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Arrangement Of Transmissions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
【解決手段】 エンジンEと第1モータジェネレータMG1と第2モータジェネレータMG2とを連結した駆動力合成変速機TMを備えたハイブリッド車において、走行モードとして、無段変速比により走行する「無段変速比モード」と、ロー側の固定変速比により走行する「ロー側固定変速比モード」と、を有し、駆動力要求状態を検出する駆動力要求検出手段を設け、前記「無段変速比モード」を選択しての走行時、前記駆動力要求検出手段により駆動力要求状態での走行であると検出された場合、「無段変速比モード」から「ロー側固定変速比モード」へモード遷移する駆動力要求対応モード遷移制御手段を設けた。
【選択図】図6
Description
走行モードとして、無段変速比により走行する無段変速比モードと、ロー側の固定変速比により走行するロー側固定変速比モードと、を有し、
駆動力要求状態を検出する駆動力要求検出手段を設け、
前記無段変速比モードを選択しての発進時、前記駆動力要求検出手段により駆動力要求状態での走行であると検出された場合、無段変速比モードからロー側固定変速比モードへモード遷移する駆動力要求対応モード遷移制御手段を設けた。
図1は実施例1のモード遷移制御装置が適用されたハイブリッド車の駆動系を示す全体システム図である。実施例1におけるハイブリッド車の駆動系は、図1に示すように、エンジンEと、第1モータジェネレータMG1と、第2モータジェネレータMG2と、出力軸OUT(出力部材)と、駆動力合成変速機TMと、を備えている。前記駆動力合成変速機TMは、第1遊星歯車PG1(第1差動装置)と、第2遊星歯車PG2(第2差動装置)と、第3遊星歯車PG3(第3差動装置)と、エンジンクラッチECと、ローブレーキLB(第1摩擦締結要素)と、ハイクラッチHC(第2摩擦締結要素)と、ハイローブレーキHLB(第3摩擦締結要素)と、を有する。
前記第1回転メンバM1(S1,S2)には、第2モータジェネレータMG2が連結されている。
前記第2回転メンバM2(R1,R3)には、入出力要素の何れにも連結されていない。
前記第3回転メンバM3(PC2,R3)には、エンジンクラッチECを介してエンジンEが連結されている。
前記第1ピニオンキャリアPC1には、ハイクラッチHCを介して第2モータジェネレータMG2が連結されている。また、ローブレーキLBを介して変速機ケースTCに連結されている。
前記第2リングギヤR2には、第1モータジェネレータMG1が連結されている。また、ハイローブレーキHLBを介して変速機ケースTCに連結されている。
前記第3ピニオンキャリアPC3には、出力軸OUTが連結されている。なお、出力軸OUTからは、図外のプロペラシャフトやディファレンシャルやドライブシャフトを介して左右の駆動輪に駆動力が伝達される。
実施例1におけるハイブリッド車の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、インバータ3と、バッテリ4と、油圧制御装置5と、統合コントローラ6と、アクセル開度センサ7と、車速センサ8と、エンジン回転数センサ9と、第1モータジェネレータ回転数センサ10と、第2モータジェネレータ回転数センサ11と、第3リングギヤ回転数センサ12と、ナビゲーションシステム13(表示装置)と、ローモードスイッチ14(ロー側固定変速比モードスイッチ)と、路面傾斜角センサ15(路面傾斜角検出手段)と、を有して構成されている。
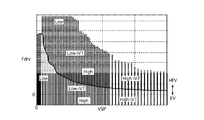
前記「Low-iVTモード」は、図2(b)及び図3(b)の共線図に示すように、ローブレーキLBを締結し、ハイクラッチHCを解放し、ハイローブレーキHLBを解放することで得られるロー側無段変速モードである。
前記「2ndモード」は、図2(c)及び図3(c)の共線図に示すように、ローブレーキLBを締結し、ハイクラッチHCを締結し、ハイローブレーキHLBを解放することで得られる2速固定モードである。
前記「High-iVTモード」は、図2(d)及び図3(d)の共線図に示すように、ローブレーキLBを解放し、ハイクラッチHCを締結し、ハイローブレーキHLBを解放することで得られるハイ側無段変速モードである。
前記「Highモード」は、図2(e)及び図3(e)の共線図に示すように、ローブレーキLBを解放し、ハイクラッチHCを締結し、ハイローブレーキHLBを締結することで得られるハイギヤ固定モードである。
図6は実施例1の統合コントローラ6において実行される駆動力要求対応モード遷移制御処理の流れを示すフローチャートであり、以下、各ステップについて説明する(駆動力要求対応モード遷移制御手段)。
特開2003−32808号公報には、共線図上に4つの入出力要素が配列される4要素2自由度の遊星歯車機構を構成し、前記入出力要素のうちの内側に配列される2つの要素の一方にエンジンからの入力を、他方に駆動系統への出力をそれぞれ割り当てると共に、前記内側の要素の両外側に配列される2つの要素にそれぞれ第1モータジェネレータと第2モータジェネレータとを連結したハイブリッド駆動装置が記載されている。これによりエンジン出力に対してモータジェネレータ側が負担するトルクを小さくしてその小型化を図れると共に、モータジェネレータを通過するエネルギがより低減することから、駆動装置としての伝達効率が向上する。
これに対し、実施例1のハイブリッド車のモード遷移制御装置にあっては、「無段変速比モード」を選択しての発進時、駆動力要求検出手段により駆動力要求状態での走行であると検出された場合(ドライバによる駆動力要求時と、走行環境による駆動力要求時とを含む。)、「無段変速比モード」から「ロー側固定変速比モード」へモード遷移する駆動力要求対応モード遷移制御手段を設けることで、上記課題を解決した。
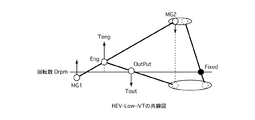
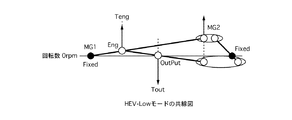
まず、図9(a)は「HEV-Low-iVTモード」での車両停止時を示す共線図であり、両モータジェネレータMG1,MG2により共線図上のレバーをバランスさせている。この「HEV-Low-iVTモード」で発進する場合、例えば、ドライバが高い駆動力を要求してローモードスイッチ14をONにすると、図9(b)の共線図に示すように、エンジンクラッチECを解放し、同時に、第1モータジェネレータMG1と第2モータジェネレータMG2の回転数N1,N2を0rpmとなるように制御する。次に、図9(c)の共線図に示すように、ハイローブレーキHLBを締結して第2リングギヤR2をケース固定とすることで、第2モータジェネレータMG2のみを駆動源とする「EV-Lowモード」での発進を開始する。その後、第2モータジェネレータMG2の正トルクを増し、エンジン回転数Neと第3回転メンバM3の回転数が共線図上で一致すると、エンジンクラッチECを締結し、エンジンEと第2モータジェネレータMG2とを駆動源とする「HEV-Lowモード」へ移行する。
実施例1のハイブリッド車のモード遷移制御装置にあっては、下記に列挙する効果を得ることができる。
図11は実施例2の統合コントローラ6において実行される駆動力要求対応モード遷移制御処理の流れを示すフローチャートであり、以下、各ステップについて説明する(駆動力要求対応モード遷移制御手段)。なお、ステップS21〜ステップS29のそれぞれのステップは、図6のステップS1〜ステップS9と同じ処理を行うステップであるため、説明を省略する。
第2実施例のハイブリッド車にあっては、「HEV-Low-iVTモード」から「HEV-Lowモード」へモード遷移するにあたって、「EV-Lowモード」にモード遷移したときに、バッテリS.O.Cが低い場合、図11に示すフローチャートにおいて、ステップS27からステップS30→ステップS31→ステップS28→ステップS29へと進む流れとなり、モータジェネレータクラッチMGCを解放しシリーズクラッチSCを締結することでエンジンEと第1モータジェネレータMG1とを差動装置から切り離し、エンジンEにより第1モータジェネレータMG1を駆動して発電し、その後、「HEV-Lowモード」へ移行する。
実施例2のハイブリッド車のモード遷移制御装置では、実施例1の(1)〜(9)の効果に加え、下記の効果を得ることができる。
MG1 第1モータジェネレータ
MG2 第2モータジェネレータ
OUT 出力軸(出力部材)
PG1 第1遊星歯車(第1差動装置)
PG2 第2遊星歯車(第2差動装置)
PG3 第3遊星歯車(第3差動装置)
EC エンジンクラッチ
LB ローブレーキ(第1摩擦締結要素)
HC ハイクラッチ(第2摩擦締結要素)
HLB ハイローブレーキ(第3摩擦締結要素)
MGC モータジェネレータクラッチ(第4摩擦締結要素)
SC シリーズクラッチ(第5摩擦締結要素)
1 エンジンコントローラ
2 モータコントローラ
3 インバータ
4 バッテリ
5 油圧制御装置
6 統合コントローラ
7 アクセル開度センサ
8 車速センサ
9 エンジン回転数センサ
10 第1モータジェネレータ回転数センサ
11 第2モータジェネレータ回転数センサ
12 第3リングギヤ回転数センサ
13 ナビゲーションシステム(表示装置)
14 ローモードスイッチ(ロー側固定変速比モードスイッチ)
15 路面傾斜角センサ(路面傾斜角検出手段)
Claims (10)
- 共線図上に4つ以上の入出力要素が配列される差動装置を有し、前記入出力要素のうちの内側に配列される2つの要素の一方にエンジンからの入力を、他方に駆動系統への出力部材をそれぞれ割り当てると共に、前記内側の要素の両外側に配列される2つの要素にそれぞれ第1モータジェネレータと第2モータジェネレータとを連結した駆動力合成変速機を備えたハイブリッド車において、
走行モードとして、無段変速比により走行する無段変速比モードと、ロー側の固定変速比により走行するロー側固定変速比モードと、を有し、
駆動力要求を検出する駆動力要求検出手段を設け、
前記無段変速比モードを選択しての走行時、前記駆動力要求検出手段により駆動力要求状態での走行であると検出された場合、無段変速比モードからロー側固定変速比モードへモード遷移する駆動力要求対応モード遷移制御手段を設けたことを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力要求検出手段は、無段変速モードを選択しての走行時、ドライバにより操作されるロー側固定変速比モードスイッチからの信号がオン信号である場合、駆動力要求状態であると検出することを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力要求検出手段は、無段変速モードを選択しての走行時、ナビゲーションシステムからの地形情報により自車の走行する路面が登坂路または自車が走行を予定している路面が登坂路である場合、駆動力要求状態であると検出することを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力要求検出手段は、無段変速モードを選択しての走行時、路面傾斜角検出手段からの検出値が登坂勾配路面を示す場合、駆動力要求状態であると検出することを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力要求検出手段は、無段変速モードを選択しての走行時、アクセル開度検出手段からの検出値が設定値以上である場合、駆動力要求状態であると検出することを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1乃至5の何れか1項に記載されたハイブリッド車のモード遷移制御装置において、
前記エンジンと前記差動装置のエンジン入力要素との間にエンジンクラッチを設け、
前記差動装置の一つの要素をケースに固定し、ロー側の固定変速比を得るロー側固定変速比用ブレーキを設け、
前記駆動力要求対応モード遷移制御手段は、無段変速比モードからロー側固定変速比モードへモード遷移する場合、エンジンクラッチを解放し、第1モータジェネレータと第2モータジェネレータの回転数制御により共線図の傾きをロー側固定変速比モードの傾きに制御し、ロー側固定変速比用ブレーキを締結するシーケンス制御によりモータジェネレータを駆動源とするロー側固定変速比モードへのモード遷移を行うことを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項6に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力要求対応モード遷移制御手段は、ロー側固定変速比用ブレーキを締結することにより無段変速比モードからモータジェネレータを駆動源とするロー側固定変速比モードへモード遷移した後、前記差動装置のエンジン入力要素の回転数とエンジン回転数とが一致した時点でエンジンクラッチを締結することでエンジンとモータジェネレータを駆動源とするロー側固定変速比モードへのモード遷移を行うことを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1乃至7の何れか1項に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力要求対応モード遷移制御手段により無段変速比モードからロー側固定変速比モードへモード遷移した際、選択されている走行モードがロー側固定変速比モードであることをドライバから視認可能な位置に設けられた表示装置に表示することを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項1乃至8の何れか1項に記載されたハイブリッド車のモード遷移制御装置において、
前記駆動力合成変速機は、2自由度3要素の第1差動装置と第2差動装置と第3差動装置により構成され、
前記第2差動装置の共線図上で内側に配列される要素と前記第3差動装置の共線図上で一端に配列される要素とを連結してエンジンを割り当て、前記第2差動装置の共線図上で一端に配列される要素に第1モータジェネレータを割り当て、前記第1差動装置の共線図上で一端に配列される要素と前記第2差動装置の共線図上で一端に配列される要素とを連結して第2モータジェネレータを割り当て、前記第3差動装置の共線図上で内側に配列される要素に出力部材を割り当て、
前記第1差動装置の共線図上で他端に配列される要素と前記第3差動装置の共線図上で他端に配列される要素とを直結要素により連結し、前記第1差動装置の共線図上で内側に配列される要素と変速機ケースとの間に第1摩擦締結要素を設け、第2モータジェネレータが割り当てられる要素と前記直結要素との間に第2摩擦締結要素を設け、前記第2差動装置の共線図上で一端に配列される要素と変速機ケースとの間に第3摩擦締結要素を設け、
前記無段変速比モードは、第1摩擦締結要素を締結し、第2摩擦締結要素を解放し、第3摩擦締結要素を解放することで得られるロー側無段変速モードであり、
前記ロー側固定変速比モードは、第1摩擦締結要素を締結し、第2摩擦締結要素を解放し、第3摩擦締結要素を締結することで得られるローギヤ固定モードであり、
前記駆動力要求対応モード遷移制御手段は、ロー側無段変速モードを選択しての走行時、前記駆動力要求検出手段により駆動力要求状態での走行であると検出された場合、ロー側無段変速モードからローギヤ固定モードへモード遷移することを特徴とするハイブリッド車のモード遷移制御装置。 - 請求項9に記載されたハイブリッド車のモード遷移制御装置において、
前記第2差動装置の共線図上で一端に配列される要素と第1モータジェネレータとの間に第4摩擦締結要素を設け、前記エンジンと第1モータジェネレータとの間に第5摩擦締結要素を設け、
前記駆動力要求対応モード遷移制御手段は、ロー側無段変速モードからローギヤ固定モードへモード遷移するにあたって、バッテリ容量が低い場合、第4摩擦締結要素を解放し第5摩擦締結要素を締結することでエンジンと第1モータジェネレータとを差動装置から切り離し、エンジンにより第1モータジェネレータを駆動して発電し、その後、ローギヤ固定モードへ移行することを特徴とするハイブリッド車のモード遷移制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119095A JP4135672B2 (ja) | 2004-04-14 | 2004-04-14 | ハイブリッド車のモード遷移制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119095A JP4135672B2 (ja) | 2004-04-14 | 2004-04-14 | ハイブリッド車のモード遷移制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005299844A true JP2005299844A (ja) | 2005-10-27 |
| JP4135672B2 JP4135672B2 (ja) | 2008-08-20 |
Family
ID=35331612
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004119095A Expired - Fee Related JP4135672B2 (ja) | 2004-04-14 | 2004-04-14 | ハイブリッド車のモード遷移制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4135672B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013086688A (ja) * | 2011-10-19 | 2013-05-13 | Aisin Aw Co Ltd | ハイブリッド車両の駆動装置 |
| US8788162B2 (en) | 2010-12-03 | 2014-07-22 | Hyundai Motor Company | Shifting control for a hybrid vehicle |
| JP2015147452A (ja) * | 2014-02-05 | 2015-08-20 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| KR101588760B1 (ko) * | 2014-10-17 | 2016-01-26 | 현대자동차 주식회사 | 하이브리드 차량의 동력전달장치의 제어 장치 및 방법 |
| JP2016053904A (ja) * | 2014-09-04 | 2016-04-14 | 株式会社日本自動車部品総合研究所 | 車載装置、車載システム |
| KR101694022B1 (ko) * | 2015-06-29 | 2017-01-06 | 현대자동차주식회사 | 하이브리드 차량용 주행 제어방법 |
| KR101714205B1 (ko) * | 2015-09-02 | 2017-03-08 | 현대자동차주식회사 | 하이브리드 차량의 주행 모드 제어 장치 및 방법 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06240935A (ja) * | 1993-02-15 | 1994-08-30 | Power Fuiirudo:Kk | 光選別キー及び光選別キー用鍵穴 |
| KR101251512B1 (ko) | 2010-12-06 | 2013-04-05 | 기아자동차주식회사 | 하이브리드 차량의 변속 제어방법 |
-
2004
- 2004-04-14 JP JP2004119095A patent/JP4135672B2/ja not_active Expired - Fee Related
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8788162B2 (en) | 2010-12-03 | 2014-07-22 | Hyundai Motor Company | Shifting control for a hybrid vehicle |
| JP2013086688A (ja) * | 2011-10-19 | 2013-05-13 | Aisin Aw Co Ltd | ハイブリッド車両の駆動装置 |
| JP2015147452A (ja) * | 2014-02-05 | 2015-08-20 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US9650035B2 (en) | 2014-02-05 | 2017-05-16 | Toyota Jidosha Kabushiki Kaisha | Control apparatus for hybrid vehicle |
| JP2016053904A (ja) * | 2014-09-04 | 2016-04-14 | 株式会社日本自動車部品総合研究所 | 車載装置、車載システム |
| US10061030B2 (en) | 2014-09-04 | 2018-08-28 | Denso Corporation | In-vehicle apparatus performing an operation based on a distance measured, and in-vehicle system including the in-vehicle apparatus |
| KR101588760B1 (ko) * | 2014-10-17 | 2016-01-26 | 현대자동차 주식회사 | 하이브리드 차량의 동력전달장치의 제어 장치 및 방법 |
| US9493154B2 (en) | 2014-10-17 | 2016-11-15 | Hyundai Motor Company | Control apparatus and method of power transmission system for hybrid elecric vehicle |
| KR101694022B1 (ko) * | 2015-06-29 | 2017-01-06 | 현대자동차주식회사 | 하이브리드 차량용 주행 제어방법 |
| KR101714205B1 (ko) * | 2015-09-02 | 2017-03-08 | 현대자동차주식회사 | 하이브리드 차량의 주행 모드 제어 장치 및 방법 |
| US10086827B2 (en) | 2015-09-02 | 2018-10-02 | Hyundai Motor Company | Apparatus and method for controlling driving mode of hybrid electric vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4135672B2 (ja) | 2008-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007001493A (ja) | ハイブリッド車両の制御装置 | |
| JP2006077859A (ja) | ハイブリッド車の駆動装置 | |
| JP4135708B2 (ja) | ハイブリッド車の制御装置 | |
| JP2006022844A (ja) | ハイブリッド車両の制御装置 | |
| JP4135672B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP2006298080A (ja) | ハイブリッド駆動装置 | |
| JP2006062396A (ja) | ハイブリッド車の駆動装置 | |
| JP4135668B2 (ja) | ハイブリッド駆動装置 | |
| JP2005304229A (ja) | ハイブリッド車のモータフェイル対応制御装置 | |
| JP4222301B2 (ja) | ハイブリッド車のエンジン始動制御装置 | |
| JP4193776B2 (ja) | ハイブリッド車の駆動装置 | |
| JP4039390B2 (ja) | ハイブリッド車のモード遷移制御装置およびモード遷移制御方法 | |
| JP2006017229A (ja) | ハイブリッド車両のヒルホールド制御装置 | |
| JP4228970B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP2006187049A (ja) | ハイブリッド車両の制御装置 | |
| JP4144572B2 (ja) | ハイブリッド車両のモード遷移制御装置 | |
| JP4144559B2 (ja) | ハイブリッド車のエンジン逆転防止制御装置 | |
| JP2006046577A (ja) | ハイブリッド車両の制御装置 | |
| JP4228969B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4135693B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4135671B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP3979398B2 (ja) | ハイブリッド変速機 | |
| JP4172431B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2007069843A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP4140589B2 (ja) | ハイブリッド車のパーキングロック制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051117 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080513 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080526 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110613 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |