JP2005299813A - 磁気支持装置 - Google Patents
磁気支持装置 Download PDFInfo
- Publication number
- JP2005299813A JP2005299813A JP2004117697A JP2004117697A JP2005299813A JP 2005299813 A JP2005299813 A JP 2005299813A JP 2004117697 A JP2004117697 A JP 2004117697A JP 2004117697 A JP2004117697 A JP 2004117697A JP 2005299813 A JP2005299813 A JP 2005299813A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- target position
- position command
- control target
- current control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Magnetic Bearings And Hydrostatic Bearings (AREA)
Abstract
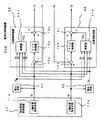
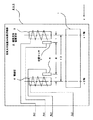
【解決手段】 x及びy軸位置指令手段11a,11bからの位置指令信号Sx,Syに基づいて演算器13d,14dがフィードフォワード信号(補正値)を求め、位置センサ7,8からの位置検出信号Px,Pyに基づくフィードバック制御の補正を行う。例えば、x軸方向の位置制御装置13は、x,y二つの軸に関する位置指令信号Sx,Syに基づいてフィードフォワード信号を求めるので、他軸であるy軸の制御系の影響を軽減できる。
【選択図】 図1
Description
図1は、この発明を実施するための実施の形態1における磁気支持装置の構成を示す構成図である。図1において、磁気支持装置2は電磁石3,4を有する。電磁石3は、x−y軸直交座標系におけるx軸上に配設され、被支持体1を非接触にて支持している。電磁石4は、x−y軸直交座標系におけるy軸上に配設され、被支持体1を非接触にて支持している。位置センサ7,8は、自己と被支持体1との距離を測定することにより、電磁石3,4を基準とした被支持体1のx,y各軸方向の位置を検出する。
Ff1x=A1x×(D11・Sx+(1−D11)Sy)+C1x ・・・(1)
演算器14dにおいて、次の計算式によってフィードフォワード信号としての出力Ff1yを計算する。但し、A1y,C1yは定数である。
Ff1y=A1y×((1−D12)・Sx+D12・Sy)+C1y ・・・(2)
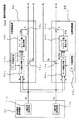
図2は、この発明の実施の形態2による磁気支持装置の構成を示す構成図である。図2において、図1に示した磁気支持装置本体2、位置センサ7、位置センサ8、電流制御器17、電流制御器18と同様のものが設けられているが、これら磁気支持装置本体周辺機器の図示を省略している。なお、後で説明する実施の形態3〜8においても、同様の磁気支持装置本体2、位置センサ7、位置センサ8、電流制御器17、電流制御器18が設けられているが、その旨を断るのを省略する。
Ff2x=A2x×(D21・Sx+(1−D21)・Sy)+B2×(D22・Vx+(1−D22)0.2・Vy)+C2x ・・・(3)
Ff2y=A2y×((1−D23)・Sx+D23・Sy)+B2×((1−D24)・Vx+D24・Vy)+C2y ・・・(4)
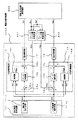
図3は、この発明の実施の形態3による磁気支持装置の構成を示す構成図である。図3において、電磁石制御装置300は、指令軌跡計算装置11及び位置制御装置33,34を有している。x軸方向の位置制御装置33は、x軸方向の位置指令信号Sxとx軸方向の位置センサ7(図1参照)の位置検出信号Pxとが一致するようなフィードバック制御系である加算器13aと、フィードフォワード制御系である補償値記憶手段33fと補償値読込手段33gと加算器13cとを有している。
図4は、この発明の実施の形態4による磁気支持装置の構成を示す構成図である。図4において、電磁石制御装置400は、指令軌跡計算装置11及び位置制御装置43,44を有している。x軸方向の位置制御装置43は、フィードバック制御系である加算器13aを有する。また、また、フィードフォワード補償する制御系である丸め込み演算手段43j,43kと補償値記憶手段43fと補償値読み込み手段43gと演算手段43hと加算器13cとを有する。
Ff4x=A4x×(D41・Sx1c+(1−D41)・Sy1c)+C4x ・・・(5)
Ff4y=A4y×((1−D42)・Sx2c+D42・Sy2c)+C4y ・・・(6)
図5及び図6は、この発明の実施の形態5を示すものであり、図5は磁気支持装置の構成を示す構成図、図6はフィードフォワード値算出手段の動作を説明するための説明図である。図5において、電磁石制御装置500は、指令軌跡計算装置11及び位置制御装置53,54を有している。x軸方向の位置制御装置53は、x軸方向の位置指令信号Sxとx軸方向の位置センサ7(図1参照)の検出した位置検出信号Pxとが一致するようなフィードバック制御系である加算器13aを有する。また、フィードフォワード制御系である補間用の補間用のデータ記憶手段53a、データ読込手段53b、フィードフォワード値算出手段53c、加算器13cを有する。補間用のデータ読込手段53bは、x軸方向の位置指令信号Sxとy軸方向の位置指令信号Syの前後のこれらの信号の値に最も近い4点のデータDx1〜Dx4を補間用のデータ記憶手段53aから読み込み、フィードフォワード値算出手段53cへ渡す。フィードフォワード値算出手段53cは、これらの値から補間法により補正値を求め、フィードフォワード信号Ff5xとして加算器13cへ出力する。
Ff5x=(Z1・0.6+Z2・0.4)×0.8+(Z3・0.6+Z4・0.4)×0.2
となる。このフィードフォワード信号Ff5xを加算器13cへ出力する。
図7は、この発明の実施の形態6による磁気支持装置の構成を示す構成図である。図7において、電磁石制御装置600は、x軸方向の位置制御装置63とy軸方向の位置制御装置64とを有する。x軸方向の位置制御装置63は、x軸方向の位置指令信号Sxとx軸方向の位置センサ7(図1参照)の検出値Pxとが一致するように制御するフィードバック制御系である加算器13aとPID制御器13bと、フィードフォワード補償する制御系である演算器63a,63bを有する。演算器63a,63bは、x軸方向の位置指令信号Sxとy軸方向の位置指令信号Syとのそれぞれについて個別に所定の演算をして、その値を加算器13cに出力する。そして、加算器13cからは、PID制御器13bの信号を演算器63a,63bからの信号により補正して、制御信号Cxが出力される。
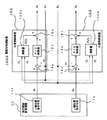
図8は、この発明の実施の形態7による磁気支持装置の構成を示す構成図である。図8において、電磁石制御装置1000は、指令軌跡計算装置11及び位置制御装置103,104を有している。位置制御装置103は加算器13a、PID制御器13b、加算器13c、演算器103dを有する。演算器103dには、位置センサ7からのフィードバック信号であるx軸方向の位置検出信号Pxと、位置センサ8(図1参照)からのフィードバック信号であるy軸方向の位置検出信号Pyが入力され、例えば次のような演算が行われ、補償信号Fb7xが加算器13cへ出力される。但し、A7x,C7x,D71は定数で、かつ0<D71<1である。
Fb7x=A7x×(D71・Px+(1−D71)・Py)+C7x ・・・(7)
Fb7y=A7y×((1−D72)・Px+D72・Py)+C7y ・・・(8)
このように、位置センサ3,4によるx,y両方向の位置検出信号Px,Pyによりフィードバック制御系の補正を行うことにより、他方の軸方向への移動により、電磁石と被支持体の距離が変動することによる影響を抑制し、制御性能を向上させることができる。特に、他方向のフィードバック信号を用いることで追従遅れによる影響を受けず補償することができるため、制御性能が向上する。
図9及び図10は、この発明の実施の形態8を示すものであり、図9は磁気支持装置の構成を示す構成図、図10は磁気支持装置本体周辺機器の詳細構成を示す構成図である。図9における磁気支持装置本体周辺機器890の詳細構成を図10に示す。図10において、被支持体1を電磁石3,4にて図の上下方向から非接触にて支持している。電磁石3,4は、被支持体1の上面に垂直で図10の左右方向に所定の距離を有する互いに平行な第一及び第二の軸であるx1軸及びx2軸上に、被支持体1の上面と間隙を設けて配設されている。位置センサ7,8はそれぞれ電磁石3,4の近傍に、すなわち位置センサ7はx1軸の左方近傍に、位置センサ8はx2軸の右方近傍に配置され、それぞれ被支持体1と間の距離を測定する。
Px1c=(9・Px1−Px2)/8
Px2c=(9・Px2−Px1)/8
のように計算することができる。これにより、電磁石3,4と被支持体1の吸引面の距離をより正確に推定することができる。
図11は、この発明の実施の形態9を示す磁気支持装置の構成を示す構成図である。図11において、電磁石制御装置1100は、図9の電磁石制御装置1000に比して、次の点が異なるが、その制御動作については同様の動作をする。x1軸方向の位置制御装置113は、フィードバック信号補正器801の補正信号Px1cと位置指令信号Sx1とが一致するように電磁石3(図10)の電流を制御するフィードバック制御系である加算器13aとPID制御器13bとを有する。
11a x軸位置指令手段、11b y軸位置指令手段、13,14 位置制御装置、
13a,14a 加算器、13b,14b PID制御器、13d,14d 演算器、
23,24 位置制御装置、23d,24d 演算器、33,34 位置制御装置、
33f,34f 補償値記憶手段、33g,34g 補償値読込手段、
43,44 位置制御装置、43f,44f 補償値記憶手段、
43g,44g 補償値読込手段、43h,44h 演算手段、
43j,43k,43j,43k 丸め演算手段、53,54 位置制御装置、
53f,54f データ記憶憶手段、53g,54g データ読込手段、
53h,54h フィードフォワード値算出手段、63,64 位置制御装置、
63a,63b,64a,64b 演算器、103,104 位置制御装置、
103d,104d 演算器、801,802 フィードバック信号補正器、
63a,63b,64a,64b 演算器、111 指令軌跡計算装置、
111a x軸位置指令手段、111b y軸位置指令手段、
113,114 位置制御装置、113d,114d 演算器。
Claims (10)
- 被支持体を磁気力により第一及び第二の軸方向からそれぞれ非接触にて支持する第一及び第二の電磁石と、上記第一の電磁石の近傍に配設され上記被支持体の位置を検出して第一の位置検出信号を発信する第一の位置センサと、上記第二の電磁石の近傍に配設され上記被支持体の位置を検出して第二の位置検出信号を発信する第二の位置センサと、上記被支持体の目標位置を指令する第一及び第二の制御目標位置指令信号を発信する第一及び第二の制御目標位置指令信号発信手段と、上記第一の位置検出信号と上記第一の制御目標位置指令信号とに基づいて上記第一の電磁石の電流を制御する第一の電流制御信号を発信する第一の電流制御信号発信手段と、上記第一及び第二の制御目標位置指令信号に基づいて上記第一の電流制御信号を補正する第一の信号補正手段と、上記第二の位置検出信号と上記第二の制御目標位置指令信号とに基づいて上記第二の電磁石の電流を制御する第二の電流制御信号を発信する第二の電流制御信号発信手段と、上記第一及び第二の制御目標位置指令信号に基づいて上記第二の電流制御信号を補正する第二の信号補正手段とを備えた磁気支持装置。
- 上記第一の信号補正手段は上記第一及び第二の位置検出信号の関数式に基づいて求めた第一の関数式補正値に基づき上記第一の電流制御信号を補正し、上記第二の信号補正手段は上記第一及び第二の位置検出信号の関数式に基づいて求めた第二の関数式補正値に基づき上記第二の電流制御信号を補正するものであることを特徴とする請求項1に記載の磁気支持装置。
- 上記第一の信号補正手段は上記第一及び第二の制御目標位置指令信号と上記第一及び第二の制御目標位置指令信号の時間変化分とに基づいて上記第一の電流制御信号を補正し、上記第二の信号補正手段は上記第一及び第二の制御目標位置指令信号と上記第一及び第二の制御目標位置指令信号の時間変化分とに基づいて上記第二の電流制御信号を補正するものであることを特徴とする請求項1に記載の磁気支持装置。
- 上記第一の信号補正手段は上記第一及び第二の制御目標位置指令信号の各値に対応させて予め定められた第一の補正値に基づいて上記第一の電流制御信号を補正し、上記第二の信号補正手段は上記第一及び第二の制御目標位置指令信号の各値に対応させて予め定められた第二の補正値に基づいて上記第二の電流制御信号を補正するものであることを特徴とする請求項1に記載の磁気支持装位置。
- 上記第一の信号補正手段は上記第一及び第二の制御目標位置指令信号の各値を丸める第一の丸め手段を有し丸められた上記第一及び第二の制御目標位置指令信号の各値に対応させて予め定められた第一の丸め補正値に基づいて上記第一の電流制御信号を補正し、上記第二の信号補正手段は上記第一及び第二の制御目標位置指令信号の各値を丸める第二の丸め手段を有し丸められた上記第一及び第二の制御目標位置指令信号の各値に対応させて予め定められた第二の丸め補正値に基づいて上記第二の電流制御信号を補正するものであることを特徴とする請求項4に記載の磁気支持装位置。
- 上記第一の信号補正手段は上記第一及び第二の制御目標位置指令信号の各値に対応させて予め定められた第一の補間用データを記憶する第一の補間用データ記憶手段と上記第一の補間用データから補間法により上記第一の制御目標位置指令信号に応じた第一の補間補正値を求める第一の補間補正値算出手段とを有し上記第一の補間補正値に基づき上記第一の電流制御信号を補正するものであり、上記第二の信号補正手段は上記第一及び第二の制御目標位置指令信号の各値に対応させて予め定められた第二の補間用データを記憶する第二の補間用データ記憶手段と上記第二の補間用データから補間法により上記第二の制御目標位置指令信号に応じた第二の補間補正値を求める第二の補間補正値算出手段とを有し上記第一の補間補正値に基づき上記第二の電流制御信号を補正するものであることを特徴とする請求項4に記載の磁気支持装置。
- 上記第一の信号補正手段は上記第一の制御目標位置指令信号に基づいて求めた第一の演算補正値と上記第二の制御目標位置指令信号の値に基づいて求めた第二の演算補正値とに基づいて上記第一の電流制御信号を補正し、上記第二の信号補正手段は上記第一の制御目標位置指令信号に基づいて求めた第三の演算補正値と上記第二の制御目標位置指令信号の値に基づいて求めた第四の演算補正値に基づいて上記第二の電流制御信号を補正するものであることを特徴とする請求項1に記載の磁気支持装位置。
- 被支持体を磁気力により第一及び第二の軸方向からそれぞれ非接触にて支持する第一及び第二の電磁石と、上記第一の電磁石の近傍に配設され上記被支持体の位置を検出して第一の位置検出信号を発信する第一の位置センサと、上記第二の電磁石の近傍に配設され上記被支持体の位置を検出して第二の位置検出信号を発信する第二の位置センサと、上記被支持体の目標位置を指令する第一及び第二の制御目標位置指令信号を発信する第一及び第二の制御目標位置指令信号発信手段と、上記第一の位置検出信号と上記第一の制御目標位置指令信号とに基づいて上記第一の電磁石の電流を制御する第一の電流制御信号を発信する第一の電流制御信号発信手段と、上記第一及び第二の位置検出信号に基づいて上記第一の電流制御信号を補正する第一の信号補正手段と、上記第二の位置検出信号と上記第二の制御目標位置指令信号とに基づいて上記第二の電磁石の電流を制御する第二の電流制御信号を発信する第二の電流制御信号発信手段と、上記第一及び第二の位置検出信号に基づいて上記第二の電流制御信号を補正する第二の信号補正手段とを備えた磁気支持装置。
- 上記第一及び第二の軸は、互いに交差するものであることを特徴とする請求項1ないし8のいずれか1項に記載の磁気支持装置。
- 被支持体を磁気力により互いに平行な第一及び第二の軸方向からそれぞれ非接触にて支持する第一及び第二の電磁石と、上記第一の電磁石の近傍に配設され上記被支持体の位置を検出して第一の位置検出信号を発信する第一の位置センサと、上記第二の電磁石の近傍に配設され上記被支持体の位置を検出して第二の位置検出信号を発信する第二の位置センサと、上記第一及び第二の位置検出信号に基づいて補正した第一の補正位置検出信号を求める第一の補正位置信号算出手段と、上記第一及び第二の位置検出信号に基づいて補正した第二の補正位置検出信号を求める第二の補正位置信号算出手段と、上記被支持体の目標位置を指令する第一及び第二の制御目標位置指令信号を発信する第一及び第二の制御目標位置指令信号発信手段と、上記第一の補正位置検出信号と上記第一の制御目標位置指令信号とに基づいて上記第一の電磁石の電流を制御する第一の電流制御信号を発信する第一の電流制御信号発信手段と、上記第二の補正位置検出信号と上記第二の制御目標位置指令信号とに基づいて上記第二の電磁石の電流を制御する第二の電流制御信号を発信する第二の電流制御信号発信手段とを備えた磁気支持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004117697A JP2005299813A (ja) | 2004-04-13 | 2004-04-13 | 磁気支持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004117697A JP2005299813A (ja) | 2004-04-13 | 2004-04-13 | 磁気支持装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005299813A true JP2005299813A (ja) | 2005-10-27 |
Family
ID=35331586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004117697A Pending JP2005299813A (ja) | 2004-04-13 | 2004-04-13 | 磁気支持装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005299813A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100388620C (zh) * | 2006-06-13 | 2008-05-14 | 上海微电子装备有限公司 | 一种提高永磁直线电机运动精度的方法 |
| CN103901904A (zh) * | 2012-12-28 | 2014-07-02 | 上海微电子装备有限公司 | 一种电机位置干扰力校准方法 |
| JP2015010716A (ja) * | 2013-06-28 | 2015-01-19 | エスカエフ・マニュティック・メシャトロニク | 改良された能動型磁気軸受制御システム |
-
2004
- 2004-04-13 JP JP2004117697A patent/JP2005299813A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100388620C (zh) * | 2006-06-13 | 2008-05-14 | 上海微电子装备有限公司 | 一种提高永磁直线电机运动精度的方法 |
| CN103901904A (zh) * | 2012-12-28 | 2014-07-02 | 上海微电子装备有限公司 | 一种电机位置干扰力校准方法 |
| CN103901904B (zh) * | 2012-12-28 | 2016-09-28 | 上海微电子装备有限公司 | 一种电机位置干扰力校准方法 |
| JP2015010716A (ja) * | 2013-06-28 | 2015-01-19 | エスカエフ・マニュティック・メシャトロニク | 改良された能動型磁気軸受制御システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9724825B2 (en) | Robot controller for robot which sets two objects in combined state | |
| KR20110004788A (ko) | 머니퓰레이터를 작동시키기 위한 방법 및 장치 | |
| US11691293B2 (en) | Robot | |
| US7348745B2 (en) | Controller | |
| JP2019181610A (ja) | モータエンコーダ及びセンサを用いて学習制御を行うロボットシステム | |
| CN113581288B (zh) | 自动驾驶横向偏移动态修正方法、装置、设备及存储介质 | |
| TWI412908B (zh) | 並聯驅動系統 | |
| CN119356334B (zh) | 一种工业机器人实时路径修正方法及装置 | |
| JP4639417B2 (ja) | ロボットの制御装置 | |
| EP2930575B1 (en) | Positioning control device | |
| KR100450455B1 (ko) | 서보 제어 방법 | |
| JP2005299813A (ja) | 磁気支持装置 | |
| US20060144182A1 (en) | Rotary shaft control apparatus | |
| US20230152074A1 (en) | Repeated determination of a position of a movable part of a coordinate measuring machine | |
| JP2000330642A (ja) | ステージの位置制御装置及び速度制御装置 | |
| JP6767436B2 (ja) | 自動機械及び制御装置 | |
| KR100457411B1 (ko) | 위치 제어 시스템 | |
| US11085801B2 (en) | Physical quantity measuring apparatus | |
| CN113383281A (zh) | 控制装置以及控制程序 | |
| JP5361334B2 (ja) | 産業機械 | |
| JP2010038896A (ja) | 速度検出装置および位置検出装置および位置決め装置 | |
| JPWO2009013985A1 (ja) | 多自由度ステージ制御装置 | |
| JP2024005713A (ja) | 計測システム、制御装置および計測方法 | |
| KR20230106249A (ko) | 산업용로봇 경로오차보상 시스템 및 이를 이용한 방법 | |
| WO2020250789A1 (ja) | 直接教示装置及び直接教示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20051209 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Effective date: 20081031 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081111 |
|
| A521 | Written amendment |
Effective date: 20090113 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A02 | Decision of refusal |
Effective date: 20090421 Free format text: JAPANESE INTERMEDIATE CODE: A02 |