JP2005299568A - 可動翼ポンプ装置及びその運転方法 - Google Patents
可動翼ポンプ装置及びその運転方法 Download PDFInfo
- Publication number
- JP2005299568A JP2005299568A JP2004119372A JP2004119372A JP2005299568A JP 2005299568 A JP2005299568 A JP 2005299568A JP 2004119372 A JP2004119372 A JP 2004119372A JP 2004119372 A JP2004119372 A JP 2004119372A JP 2005299568 A JP2005299568 A JP 2005299568A
- Authority
- JP
- Japan
- Prior art keywords
- blade angle
- blade
- shaft
- movable blade
- drive shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

Landscapes
- Control Of Non-Positive-Displacement Pumps (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
Abstract
【課題】 設備費の嵩む潤滑水供給機構が不要な軸受を備えた可動翼ポンプ装置を提供する。
【解決手段】 中空の駆動軸24に対して翼角が変更可能に軸支された可動翼羽根車28をポンプケーシングに収容し、前記駆動軸24に挿通された操作軸25により前記翼角を操作する翼角操作機構を備えてなる可動翼ポンプの複数を同軸上に連結して、動力伝達機構により前記可動翼羽根車28を前記駆動軸24に連動して回転させるように構成し、前記駆動軸24を無注水軸受32を介して前記ポンプケーシング21に支持して可動翼ポンプ装置を構成する。
【選択図】 図1
【解決手段】 中空の駆動軸24に対して翼角が変更可能に軸支された可動翼羽根車28をポンプケーシングに収容し、前記駆動軸24に挿通された操作軸25により前記翼角を操作する翼角操作機構を備えてなる可動翼ポンプの複数を同軸上に連結して、動力伝達機構により前記可動翼羽根車28を前記駆動軸24に連動して回転させるように構成し、前記駆動軸24を無注水軸受32を介して前記ポンプケーシング21に支持して可動翼ポンプ装置を構成する。
【選択図】 図1
Description
本発明は、排水ポンプに関し、特に、水路に流入する雨水等の流入水を大深度の地下に設けられた流入水路に集め、集めた流入水を排水ポンプ機場に導いて河川等に放流する地下排水施設や上水道の揚水設備、下水道の揚水設備に好適な可動翼ポンプ装置に関する。
地下排水施設では、降雨による流入量の急激な増加に対応させて計画水量の排水を行わせるため、流入水によるポンプ井の水位の急上昇が生じる前に、つまりポンプ井の水位が低い状態から排水ポンプの運転を開始するいわゆる先行待機運転が必要となる。このような先行待機運転の場合、あるいは流入量の変化に合わせ、排水ポンプの吐出量を容易にかつ経済的に調節することが要望される。また上水道や下水道の揚水設備では計画水量に応じて、ポンプの吐出量を容易にかつ経済的に調整することが要望されている。このような要望を満たすポンプとして可動翼ポンプがあるが、揚程の大きな設備に採用するために、複数の立軸ポンプを同一軸上に多段に連結し、比速度を斜流羽根および軸流羽根の領域とし、かつオープン羽根で製作可能な全揚程とすることで、駆動軸に対して翼角を変更可能に軸支された可動翼羽根車と、該可動翼羽根車を支持軸周りに回転させて翼角を操作する翼角操作機構とを有する可動翼ポンプを採用した立軸多段可動翼ポンプが提案されている。そして、このような立軸ポンプの駆動軸を支持する軸受構造として、従来は清水の注水を必要とするゴム軸受が最も一般的に使用されている。
実開昭59−70098号公報
しかし、上述した従来の技術によるゴム軸受は、清水中では良好な摺動特性が得られるものの、河川水中や下水中、気中では劣悪となり磨耗による破損を招く虞があるため、運転中は絶えず清水で潤滑させる必要があるところ、始動前には揚水管内に清水が満たされていないので、駆動軸を保護管で被い、始動前に該保護管を介してゴム軸受に外部から充分な潤滑水(清水)を供給する潤滑水供給機構を設ける必要があり、このための圧力水源、給水配管、給水量制御設備、及びそのメンテナンスが必要とされるという問題があった。
また翼角操作機構は、通常、操作軸を上下操作するギヤ機構と、ギヤ機構により上下操作される操作軸に連動して羽根の角度を変更するアームを駆動するリンク機構と、アーム通りンク機構とを連結する連結機構を備えて構成されるが、これらを円滑に作動させるためには夫々機械的クリアランスを設定する必要があり、翼角を設定開度に操作する場合、開度の大なる方から小なる方への設定操作と、開度の小なる方から大なる方への設定操作では、機械的クリアランスに起因するヒステリシスが存在する。
つまり、設定開度を示すゲージが同値を示しているにもかかわらず、実際の翼角は若干異なる値になるという現象が現れるのである。このようなヒステリシス現象により、同一開度に設定された場合であっても流量比で数%の差が生じ、目標流量に設定するために翼角を流量によるフィードバック制御で調整すると、翼角の開閉を繰り返してハンチングを生じて収束しない虞があり、ハンチング現象を解消すべく不感帯を大きくすると制御精度が低下するという問題があった。
さらに吸込流体が可動翼に及ぼす力が前記翼角制御機構の摩擦力を上回った場合、機械的クリアランスの方向によっては翼角が変化し、流量が変化するという問題もあった。
本発明の目的は、上述の従来欠点に鑑み、設備費の嵩む潤滑水供給機構が不要な軸受を備えた可動翼ポンプ装置を提供する点にある。また翼角制御装置の操作方向の違いにより生じる翼角位置の差および流体力による翼角の変動が生じない流量制御精度に優れた可動翼運転方法を提供する点にある。
上述の目的を達成するため、本発明による可動翼ポンプ装置の第一の特徴構成は、特許請求の範囲の書類の請求項1に記載した通り、中空の駆動軸に対して翼角が変更可能に軸支された可動翼羽根車をポンプケーシングに収容し、前記駆動軸に挿通された操作軸により前記翼角を操作する翼角操作機構を備えてなる可動翼ポンプの複数を同軸上に連結して、動力伝達機構により前記可動翼羽根車を前記駆動軸に連動して回転させるように構成してある可動翼ポンプ装置であって、前記駆動軸を無注水軸受を介して前記ポンプケーシングに支持してある点にある。
上述の構成によれば、無注水軸受を採用することにより、従来のゴム軸受のための潤滑水(清水)の注水が不要となるので、圧力水源、給水配管、給水量制御設備等の設備を設けなくとも、運転することが可能となる。
本発明による可動翼ポンプ装置の第二の特徴構成は同請求項2に記載した通り、前記ポンプの吸込側に羽根車ハブカバーと羽根車ハブカバー支持軸を設け、該支持軸を無注水軸受けで支持した点にある。
上述の構成によれば、可動翼ポンプが多段に設けられ、振動の激しいポンプ装置であっても、最下位の羽根車ハブの回転軸側から支持することにより、振動を抑制し、延いては複数の軸受に掛かる負荷変動を押さえ、長期に亘り安定的に運転可能となるのである。
本発明による可動翼ポンプ装置の運転方法の第一の特徴構成は、同請求項3に記載した通り、中空の駆動軸に対して翼角が変更可能に軸支された可動翼羽根車をポンプケーシングに収容し、前記駆動軸に挿通された操作軸により前記翼角を操作する翼角操作機構を備えてなり、前記翼角は操作軸またはこれに連動する軸受ハウジングの変位を測定して制御し、動力伝達機構により前記可動翼羽根車を前記駆動軸に連動して回転させるように構成してある可動翼ポンプ装置の運転方法であって、前記翼角を操作軸または軸受けハウジングの変位をもとに目標設定開度に操作するときに、前記設定開度において生じる前記翼角操作機構の機械的クリアランスが、常に予め定めた所定の方向側に生じるように操作する点にある。即ち常に全閉側から開方向に操作するが全開側から開方向に操作するかのいずれかを予め定めて操作する点にある。
翼角操作機構は、通常、操作軸を上下操作するギヤ機構と、ギヤ機構により上下操作される操作軸に連動して羽根の角度を変更するアームを駆動するリンク機構と、アーム通りンク機構とを連結する連結機構を備えて構成されるが、これらを円滑に作動させるためには夫々機械的クリアランスを設定する必要があり、翼角を設定開度に操作する場合、開度の大なる方から小なる方への設定操作と、開度の小なる方から大なる方への設定操作では、機械的クリアランスに起因するヒステリシスが存在する。
つまり、設定開度を示すゲージが同値を示しているにもかかわらず、実際の翼角は若干異なる値になるという現象が現れるのである。このようなヒステリシス現象により、同一開度に設定された場合であっても流量比で数%の差が生じ、目標流量に設定するために翼角を流量によるフィードバック制御で調整すると、翼角の開閉を繰り返してハンチングを生じて収束しない虞があり、ハンチング現象を解消すべく不感帯を大きくすると制御精度が低下するという問題がある。
それに対して上述のように、前記翼角制御機構の機械的クリアランスが常に予め定めた所定の方向側に生じるように操作すれば、翼角制御機構の機械的クリアランスに起因するヒステリシスに影響されることなく正確な流量制御が可能となるのである。
本発明による可動翼ポンプ装置の運転方法の第二の特徴構成は、同請求項4に記載した通り、中空の駆動軸に対して翼角が変更可能に軸支された可動翼羽根車をポンプケーシングに収容し、前記駆動軸に挿通された操作軸により前記翼角を操作する翼角操作機構を備えてなり、前記翼角は操作軸またはこれに連動する軸受ハウジングの位置の変位を計測して制御し、動力伝達機構により前記可動軸羽根車を前記駆動軸に連動して回転させるように構成してある可動翼ポンプ装置の運転方法であって、前記翼角を操作軸または軸受ハウジングの変位をもとに目標設定開度に操作するときに、予め定めた所定の方向からの操作を基準とし、逆の側から操作する場合は、前記翼角操作機構の機械的クリアランスにより生じる翼の角度の差を補正した変位に目標値を修正して操作することで、基準方向からの操作と逆方向からの操作とで実際の翼の角度に差を生じないように操作する点にある。
このように操作すれば、翼角制御機構の機械的なクリアランスに起因するヒステリシスに影響されることなく正確な流量調整が可能となるうえ、目標値によっては、翼角制御のための前記変位の目標値を一度通り過ぎて逆方向に戻すという手順が不要となるのである。
本発明による可動翼ポンプ装置の運転方法の第三の特徴構成は、上述した第二の特徴構成に加えて、目標設定開度における、吸込流体が可動翼に及ぼす力の方向を判定し、前記翼角操作機構の機械的クリアランスを生じる方向が、前記設定開度において該流体力と逆の方向となる方向から操作する点にある。
このように操作することで、前述のヒステリシスの影響を受けない他、吸込流体の流体力による可動翼の翼角の変動も生じないので、より正確な流量制御が可能となるのである。
以上説明した通り、本発明によれば、設備費の嵩む潤滑水供給機構が不要な軸受を備えた可動翼ポンプ、及び、翼角操作機構の機械的クリアランスに起因する翼角位置の変動、並びに、流体力による翼角の変動が生じない可動翼ポンプの運転方法を提供することができるようになった。
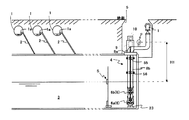
以下に本発明による可動翼ポンプ装置の実施の形態を説明する。図2に示すように、汚水と雨水を同一の管路1に収容して排水処理場に搬送する合流方式の自然流下下水管路施設に、雨天時に管路1の水量が増大したときに堰1aからのオーバーフロー水を分岐管路2により分岐させて、地中に埋設された貯水槽3に排水し、以って洪水や冠水などの災害を回避するように構成されている。当該貯水槽3は管径が数メートルで管長が数キロメートルに及ぶ大型の貯水槽で、大量の水を一時貯水できるものであり、晴天時などには当該貯水槽3から排水処理場などに向けて水を送水するポンプ設備4が備えられている。
前記ポンプ設備4は、貯水槽3の近傍に設けられたマンホール5に設置され、上下二段に配置された可動翼ポンプ装置6を備えて、下段のポンプ6aの吸込口がベルマウス23を介して貯水槽3に連通されるとともに吐出口が上段のポンプ6bに直結され、さらに上段のポンプ6bの吐出口は吐出管8bに連結され、管路1を介して河川に放流されるように構成されている。また貯水棟の水位を計測する水位計Sとポンプ出口の圧力を計測する圧力計Pが設置されている。
前記可動翼ポンプ装置6の駆動軸は吐出エルボ管8a部から上方に引き出され、動力伝達機構9に連結され、駆動軸は後述するように中空に形成され、その中空部に翼角の操作軸が挿通され、操作軸の上端が翼角制御装置10に連結されている。また前記翼角制御装置10の上部にカップリングを介して、電動モータあるいはディーゼルエンジン等の原動機(図示せず)を連結して、ポンプを駆動する。
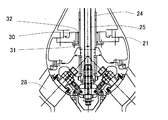
前記可動翼ポンプ装置6は、図1に示すように、中空の駆動軸24に対して翼角が変更可能に軸支された可動翼羽根車28を内部ケーシング21に収容し、前記駆動軸24に挿通された操作軸25により前記翼角を操作する翼角操作機構を備えてなる二基の可動翼ポンプ6a,6bを同軸上に連結して、前記動力伝達機構により前記可動翼羽根車28を前記駆動軸24に連動して回転させるように構成してある。
詳述すると、可動翼ポンプ6aは、外部ケーシング20と、この外部ケーシング20の吸込側にフランジ接続されたベルマウス23とで、その外殻が回転対称形に形成され、外部ケーシング20の内部に、回転軸心を一致させて同じく回転対称形の内部ケーシング21が配置され、案内羽根22により固定されている。
前記回転軸心に沿って中空状の駆動軸24が配置され、前記駆動軸24は軸受32により内部ケーシング21に回転自在に支持されるとともに、駆動軸24の周部に形成されたキー溝に嵌合するキーが内周部に形成された羽根車ハブ29が当該駆動軸24に回転自在に支持されている。
前記羽根車ハブ29には、軸受40,41により支持されたステム軸42を介してベルマウス23の内面に向かう複数の羽根車28が取り付けられ、駆動軸24の中空部に挿通された操作軸25の下端に取り付けられたクロスヘッド26が連結部材44を介して前記ステム軸42に取り付けられたアーム27に連結されている。つまり、クロスヘッド26と連結部材44とアーム27により、操作軸25の上下直線運動を羽根車28の翼角回転運動に変換するリンク機構が構成される。
図5に示すように、前記内部ケーシング21に固定設置された軸受ケーシング30に軸受シェル31を介して無注水軸受32が支承され、これにより、潤滑水(清水)を注水するための注水機構が不要となる。特に複数の可動翼ポンプを同軸上に連結する場合、注水機構が複雑になるため、無注水軸受を用いる効果は大きい。
前記羽根車ハブ29の下端部に、羽根車ハブカバー43が羽根車ハブ29と連動するように取り付けられ、羽根車ハブカバー43の下側には被支持軸43aが延設され、被支持軸43aも上述と同様に、無注水軸受52により回転自在に支持されている。つまり、前記ベルマウス23に設けられた複数のリブ36により支持される軸受ケーシング50に軸受シェル51を介して無注水軸受52が支承されている。これにより可動翼ポンプが多段に設けられ、振動の激しいポンプ装置であっても、最下位の羽根車ハブ29の回転軸側から支持することにより、振動を抑制し、延いては複数の軸受に掛かる負荷変動を押さえ、長期に亘り安定的に運転可能に構成されている。
上段側の可動翼ポンプ6bも上述と同様に構成され、同じく無注水軸受により駆動軸24が回転自在に支持されている。さらに、上段側の可動翼ポンプ6bの外部ケーシングにフランジ接続された複数の吐出管8bの内部においても、図2に示すように、無注水軸受55,56により駆動軸24が回転自在に支持されている。
無注水軸受としては、大気中での先行待機運転を行う場合には耐熱衝撃性に優れた窒化ケイ素や、カーボン繊維とPEEK樹脂の複合体、あるいは特殊繊維フェノール樹脂などを用いる。大気中での先行待機運転を行わない用途の場合には炭化ケイ素などを使用することができる。
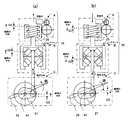
以下に、上述の可動翼ポンプ装置6の翼角制御のための運転方法を説明する。図3に示すように、前記可動翼羽根車28は、油圧または電動モータを備えた駆動部と、駆動部による駆動力により操作軸25をその軸心方向に沿って上下に移動させるギヤ機構Aと、ギヤ機構Aにより上下操作される操作軸25に連動して羽根の角度を変更するアーム27を駆動する軸受ハウジングBと、アーム27とステム軸42とを連結する連結機構Cを備えて構成される翼角操作機構70と、前記翼角操作機構70による翼角を調整する翼角制御装置10によりその翼角が変更制御される。また翼角は、軸受ハウジングの位置をリニアゲージで測定して求める。
前記翼角制御装置10は検出された吸い込み流量が目標流量になるように即ち翼角が目標翼角となるように変更操作するべく駆動部を作動させるフィードバック制御機構で構成され、目標翼角に操作する際に、吸込流体が可動翼羽根車に及ぼす力の方向と逆の側に前記翼角操作機構の機械的クリアランスが生じるように操作する。
また、ギヤ機構A、軸受ハウジングB、連結機構Cの夫々にはそれらを円滑に作動させるため機械的クリアランスG1,G2,G3が設けられているために、翼角を設定開度に操作する場合、開度の大なる方から小なる方への設定操作と、開度の小なる方から大なる方への設定操作では、機械的クリアランスに起因するヒステリシスが存在する。
例えば、可動翼羽根車の開方向から、閉操作を行う場合は、図3(b)に示すように、操作方向と同じ下向き方向側に機械的クリアランスG1、G2、G3が生じる。一方、閉方向から開操作を行う場合には、図3(a)に示すように、閉操作の場合とは反対の上向き方向側に機械的クリアランスが生じるので、リニアゲージの出力値が同じであっても、G2とG3の隙間方向の差に相当する角度分翼角度が異なるというヒステリシス現象を生じ、翼角を流量によるフィードバック制御で調整すると翼角の開閉を繰り返してハンチングを生じて収束しない虞があり、ハンチング現象を解消すべく不感帯を大きくすると制御精度が低下するという問題がある。
そこで、前記翼角を操作軸または軸受けハウジングの変位をもとに目標設定開度に操作するときに、前記設定開度において生じる前記翼角操作機構の機械的クリアランスが、常に予め定めた所定の方向側に生じるように操作することにより、ヒステリシス現象によるハンチングを防止し、正確に流量を制御することができるのである。
あるいは、前記翼角を操作軸または軸受ハウジングの変位をもとに目標設定開度に操作するときに、予め定めた所定の方向からの操作を基準とし、逆の側から操作する場合は、前記翼角操作機構の機械的クリアランスにより生じる翼の角度の差を補正した変位に目標値を修正して操作することで、基準方向からの操作と逆方向からの操作とで実際の翼の角度に差を生じないように操作することにより、ヒステリシス現象によるハンチングを防止し、正確に流量を制御できるのである。
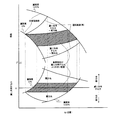
可動翼ポンプの特性曲線及び流体が翼に及ぼす力の方向の例を図4に示す。翼の開度と全揚程流量により、流体が翼に及ぼす力の方向は変動し、翼角操作機構の摩擦力より大きな流体力が働くと、即ち図4の斜線部を超える力が働くと、翼角操作機構のすき間の方向によっては翼は開方向又は閉方向に移動するおそれがある。
そこで、図3に示した翼角操作機構のすき間の方向G1、G2、G3を考慮して、吸込流体が可動翼に及ぼす力の方向を判定し、前記翼角操作機構の機械的クリアランスを生じる方向が、前記設定開度において該流体力と逆の方向となる方向から操作することで、流体力による翼の移動を生じないように操作できる。
即ち図3のような機構の場合、開方向の力が作用する流量条件の場合は開方向から閉操作により、閉方向の力が作用する流量条件の場合は閉方向から開操作により所定の翼角に調整する。このとき翼角の調整には、ヒステリシスを生じない前述の操作手法を併用することは言うまでない。
なお、目標翼角において翼に作用する力の方向は、図4の特性曲線のどの位置で動作にあたるかを判定することに他ならない。このとき現状の全揚程Hは、水位計Sの測定値と圧力計の取付位置から揚程H1を求め、この値に圧力計の読みHpを足し合わせることで求めることができる。このとき同じ可動翼ポンプを2段用いている場合は、1段あたりの全揚程hはh=(H1+Hp)/2で求めることができる。この1段あたりの全揚程hと目標流量とから目標とする翼角度が決まり、次にポンプの特性曲線から翼に作用する力の方向を判定し、翼角度の操作方向を決める。この手順は制御装置で自動的に実施することもできるし、手動設定でもよい。また、ポンプの特性が異なる場合は、上下のポンプの間に圧力測定口を設けて、当該位置の圧力を測定することで、各ポンプ毎の翼に作用する力の方向を判定することができる。一方、ポンプの運転条件範囲から判断して、常に翼に作用する力の方向が一定の場合や、力の方向が変化しても、翼角操作機構の摩擦力よりも小さな場合は、機械的クリアランスの方向を考慮して、翼角の操作方向を定めるだけで正確な流量制御が可能となる。
上述した実施形態において、上下二段に亘り可動翼ポンプを同軸上に連結した可動翼ポンプ装置を説明したが、同軸上に連結される可動翼ポンプの数はこれに限るものではなく複数段設けることができることはいうまでもない。また、可動翼ポンプは立て軸ポンプのみならず横軸ポンプまたは斜軸ポンプで構成することも可能である。
上述した実施形態では、上下二段に亘り可動翼ポンプを同軸上に連結した可動翼ポンプ装置についての運転方法を説明したが、本発明による運転方法は、単一の可動翼ポンプ装置にも適用可能である。
6:可動翼ポンプ装置
6a,6b:可動翼ポンプ
20:外部ケーシング
21:内部ケーシング
24:駆動軸
25:操作軸
26:クロスヘッド
27:アーム
28:可動羽根車
29:羽根車ハブ
30:軸受ケーシング
31:軸受シェル
32:軸受
S:水位計
P:圧力計
6a,6b:可動翼ポンプ
20:外部ケーシング
21:内部ケーシング
24:駆動軸
25:操作軸
26:クロスヘッド
27:アーム
28:可動羽根車
29:羽根車ハブ
30:軸受ケーシング
31:軸受シェル
32:軸受
S:水位計
P:圧力計
Claims (5)
- 中空の駆動軸に対して翼角が変更可能に軸支された可動翼羽根車をポンプケーシングに収容し、前記駆動軸に挿通された操作軸により前記翼角を操作する翼角操作機構を備えてなる可動翼ポンプの複数を同軸上に連結して、動力伝達機構により前記可動翼羽根車を前記駆動軸に連動して回転させるように構成してある可動翼ポンプ装置であって、
前記駆動軸を無注水軸受を介して前記ポンプケーシングに支持してある可動翼ポンプ装置。 - 前記ポンプの吸込側に羽根車ハブカバーと羽根車ハブカバー支持軸を設け、該支持軸を無注水軸受けで支持してある請求項1記載の可動翼ポンプ装置。
- 中空の駆動軸に対して翼角が変更可能に軸支された可動翼羽根車をポンプケーシングに収容し、前記駆動軸に挿通された操作軸により前記翼角を操作する翼角操作機構を備えてなり、前記翼角は操作軸またはこれに連動する軸受けハウジングの変位を計測して制御し、動力伝達機構により前記可動軸羽根車を前記駆動軸に連動して回転させるように構成してある可動翼ポンプ装置の運転方法であって、
前記翼角を操作軸または軸受けハウジングの変位をもとに目標設定開度に操作するときに、前記設定開度において生じる前記翼角操作機構の機械的クリアランスが、常に予め定めた所定の方向側に生じるように操作する可動翼ポンプ装置の運転方法。 - 中空の駆動軸に対して翼角が変更可能に軸支された可動翼羽根車をポンプケーシングに収容し、前記駆動軸に挿通された操作軸により前記翼角を操作する翼角操作機構を備えてなり、前記翼角は操作軸またはこれに連動する軸受けハウジングの位置の変位を計測して制御し、動力伝達機構により前記可動軸羽根車を前記駆動軸に連動して回転させるように構成してある可動翼ポンプ装置の運転方法であって、
前記翼角を操作軸または軸受けハウジングの変位をもとに目標設定開度に操作するときに、予め定めた所定の方向からの操作を基準とし、逆の側から操作する場合は、前記翼角操作機構の機械的クリアランスにより生じる翼の角度の差を補正した変位に目標値を修正して操作することで、基準方向からの操作と逆方向からの操作とで実際の翼の角度に差を生じないように操作する可動翼ポンプ装置の運転方法。 - 目標設定開度における、吸込流体が可動翼に及ぼす力の方向を判定し、前記翼角操作機構の機械的クリアランスを生じる方向が、前記設定開度において該流体力と逆の方向となる方向から操作する請求項4記載の可動翼ポンプ装置の運転方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119372A JP2005299568A (ja) | 2004-04-14 | 2004-04-14 | 可動翼ポンプ装置及びその運転方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119372A JP2005299568A (ja) | 2004-04-14 | 2004-04-14 | 可動翼ポンプ装置及びその運転方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007050956A Division JP2007138961A (ja) | 2007-03-01 | 2007-03-01 | 可動翼ポンプ装置の運転方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005299568A true JP2005299568A (ja) | 2005-10-27 |
| JP2005299568A5 JP2005299568A5 (ja) | 2007-04-19 |
Family
ID=35331411
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004119372A Withdrawn JP2005299568A (ja) | 2004-04-14 | 2004-04-14 | 可動翼ポンプ装置及びその運転方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005299568A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101747554B1 (ko) * | 2015-12-14 | 2017-06-14 | 대우조선해양 주식회사 | 잠수함용 해수 냉각 시스템 및 이를 사용한 해수 냉각 방법 |
-
2004
- 2004-04-14 JP JP2004119372A patent/JP2005299568A/ja not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101747554B1 (ko) * | 2015-12-14 | 2017-06-14 | 대우조선해양 주식회사 | 잠수함용 해수 냉각 시스템 및 이를 사용한 해수 냉각 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8496444B2 (en) | Water-lifting pump apparatus and method of controlling operation thereof | |
| US5360290A (en) | Underground drainage facility, vertical-shaft multi-stage adjustable vane pump, and method of running drainage pump | |
| US8336632B2 (en) | System and method for direct drive pump | |
| JPS6158666B2 (ja) | ||
| US20130330211A1 (en) | System and method for direct drive pump | |
| JP2007138961A (ja) | 可動翼ポンプ装置の運転方法 | |
| RU2554380C2 (ru) | Система насоса с непосредственным приводом | |
| JP2005299568A (ja) | 可動翼ポンプ装置及びその運転方法 | |
| JP2005299568A5 (ja) | ||
| US6004096A (en) | Hydro-surge bowl valve | |
| Bankston et al. | Selecting the Proper Pump | |
| JP3496121B2 (ja) | 地下排水施設用ポンプ及び立軸多段可動翼ポンプ | |
| RU2263824C2 (ru) | Способ пуска центробежного насосного агрегата | |
| CN201363308Y (zh) | 立式水泵用叶片全调节装置 | |
| JP3306453B2 (ja) | 地下排水施設 | |
| Hasan et al. | Pumps for Irrigation Systems | |
| JP4120578B2 (ja) | ランナベーンの水圧駆動装置。 | |
| JP2932062B2 (ja) | 大深度地下排水施設 | |
| CN222315394U (zh) | 一种液体输出调整装置 | |
| CN221482183U (zh) | 一种自耦安装卧式潜水泵 | |
| SAVVA et al. | Irrigation pumping plant | |
| JP7247010B2 (ja) | 先行待機型ポンプ | |
| Conant et al. | TURBINE WELL PUMPS—THEIR HISTORY AND DEVELOPMENT [with DISCUSSION] | |
| JPH06185496A (ja) | 可動翼排水ポンプ | |
| RU2125140C1 (ru) | Устройство для подачи воды из скважины |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Effective date: 20070301 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070327 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20080725 |