JP2005297079A - ロボット装置並びにロボットの関節装置 - Google Patents
ロボット装置並びにロボットの関節装置 Download PDFInfo
- Publication number
- JP2005297079A JP2005297079A JP2004112596A JP2004112596A JP2005297079A JP 2005297079 A JP2005297079 A JP 2005297079A JP 2004112596 A JP2004112596 A JP 2004112596A JP 2004112596 A JP2004112596 A JP 2004112596A JP 2005297079 A JP2005297079 A JP 2005297079A
- Authority
- JP
- Japan
- Prior art keywords
- joint
- robot
- frame
- casing
- planetary gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Landscapes
- Manipulator (AREA)
Abstract
【課題】 ロボットのフレームやアクチュエータ並びに減速機のケーシングの肉厚を増すことなく、十分な捩り強度を得て、小型・軽量化を実現する。
【解決手段】 ロボット本体の関節部フレームと減速機のケーシングを一体化して構成し、部品として共通化することにより、隙間を極小化して小型・軽量化するとともに高剛性化を図る。例えば、減速機として遊星歯車機構を用いる場合、例えば、マグネシウム合金製のロボット本体側の関節部フレームに対し、アルミ製パイプ上の内歯スリーブを圧入し、例えばブローチ加工により内歯歯車を形成し、ロボットの関節部フレームと減速機構を一体化することができる。
【選択図】 図5
【解決手段】 ロボット本体の関節部フレームと減速機のケーシングを一体化して構成し、部品として共通化することにより、隙間を極小化して小型・軽量化するとともに高剛性化を図る。例えば、減速機として遊星歯車機構を用いる場合、例えば、マグネシウム合金製のロボット本体側の関節部フレームに対し、アルミ製パイプ上の内歯スリーブを圧入し、例えばブローチ加工により内歯歯車を形成し、ロボットの関節部フレームと減速機構を一体化することができる。
【選択図】 図5
Description
本発明は、例えば2足歩行や4足歩行を始めとするロボット装置並びにロボットの関節装置に係り、特に、少なくとも1つの関節駆動部はアクチュエータ・モータ及び減速機で構成されるロボット装置並びにロボットの関節装置に関する。
さらに詳しくは、本発明は、アクチュエータ・モータ部分と減速機部分が出力トルクに対し十分な捩り強度を持つロボット装置並びにロボットの関節装置に係り、特に、ロボットのフレームやアクチュエータ並びに減速機のケーシング若しくはハウジングの肉厚を増すことなく、十分な捩り強度を得て、小型・軽量化を実現するロボット装置並びにロボットの関節装置に関する。
最近、イヌやネコのように4足歩行の動物の身体メカニズムやその動作を模したペット型ロボット、あるいは、ヒトのような2足直立歩行を行なう動物の身体メカニズムや動作をモデルにしてデザインされた「人間形」若しくは「人間型」と呼ばれるロボット(humanoid robot)など、脚式移動ロボットに関する研究開発が進展し、実用化への期待も高まってきている。
この種の脚式移動ロボットは、一般に、多数の関節自由度を備え、関節の動きをアクチュエータ・モータで実現するようになっている。また、各モータの回転位置、回転量などを取り出して、サーボ制御を行なうことにより、所望の動作パターンを再現するとともに、姿勢制御を行なうようになっている。
また、アクチュエータ・モータから高出力トルクを得るために、モータの出力端に減速部を設けるのが一般的である。減速部には、例えば遊星歯車機構(例えば、特許文献1を参照のこと)が適用される。遊星歯車機構は、恒星としての太陽歯車と、惑星としての遊星歯車と、遊星歯車の公転軌道を規定する内歯歯車で構成される歯車構造であり、この他に、遊星歯車の軸中心をつなぐ遊星キャリアを備えている。遊星歯車機構を用いた減速機によれば、駆動軸と同軸上で減速をすることが可能なため、複段数の連結により強力な減速比を得ることができる。
また、一般には、ロボットの運動の原動力となるアクチュエータ・ユニットとロボット装置本体側のフレームは、別々に加工されて、アクチュエータのケーシングとロボット装置本体側のフレームを連結若しくは取り付けることでロボット装置が組み上げられる。
ここで、アクチュエータの駆動部すなわちモータ部分と減速機部分は、出力トルクに対し十分な捩り強度を持つ必要がある。このため、そのケース若しくはハウジング類には十分な肉厚が必要であると思料される。
このとき、ロボット本体のフレームとアクチュエータは基本的に別体である。したがって、ロボット本体のフレーム、並びに遊星歯車減速機の内歯がそれぞれ出力トルクに対して十分な捩り強度を持つ必要がある。捩り強度を上げるためには、ロボットのフレームやアクチュエータ並びに減速機のケーシング若しくはハウジングの十分な肉厚を必要とする。ところが、これらロボットのフレームと、ケーシング若しくはハウジングの肉厚と隙間を足し合わせると、非常に大きなスペースが必要となる。これは、ロボットの小型・軽量化の障害となる。
本発明の目的は、少なくとも1つの関節駆動部はアクチュエータ・モータ及び減速機により構成される、優れたロボット装置並びにロボットの関節装置を提供することにある。
本発明のさらなる目的は、関節部を駆動させるためのアクチュエータ・モータ部分と減速機部分が出力トルクに対し十分な捩り強度を持つことができる、優れたロボット装置並びにロボットの関節装置を提供することにある。
本発明のさらなる目的は、ロボットのフレームやアクチュエータ並びに減速機のケーシング若しくはハウジングの肉厚を増すことなく、十分な捩り強度を得て、小型・軽量化を実現することができる、優れたロボット装置並びにロボットの関節装置を提供することにある。
本発明は、上記課題を参酌してなされたものであり、複数の関節部を備えたロボット装置において、
関節を駆動するアクチュエータのモータ部と、
前記モータ部の出力端に配設された減速部と、
前記減速部のケーシングと一体的に構成された関節部フレームと、
を具備することを特徴とするロボット装置である。
関節を駆動するアクチュエータのモータ部と、
前記モータ部の出力端に配設された減速部と、
前記減速部のケーシングと一体的に構成された関節部フレームと、
を具備することを特徴とするロボット装置である。
ここで、前記減速部は、恒星としての太陽歯車と、惑星としての遊星歯車と、遊星歯車の公転軌道を規定する内歯歯車からなる遊星歯車機構により構成される。
また、前記関節部フレームは、前記モータ部の取付部位を有する関節部フレーム本体と、前記遊星歯車機構の内歯歯車部を備えている。そして、前記関節部フレームは、パイプ状の部品からなる内歯スリーブを収容する内歯収容部を備え、前記内歯歯車部はこの内歯スリーブ内径部を案内に使ってブローチ加工することにより形設される。
脚式移動ロボットを始めとする多関節型のロボット装置においては、関節の動きをアクチュエータ・モータで実現し、さらにアクチュエータ・モータから高出力トルクを得るために、遊星歯車機構などで構成される減速機がモータ部の出力端に取り付けられる。
ここで、アクチュエータのモータ部分と減速機部分が出力トルクに対し十分な捩り強度を持つためには、これらのケース若しくはハウジング類には十分な肉厚が必要となる。ところが、これら部品間の隙間を考慮すると、ロボットの小型・軽量化の障害となる。すなわち、伝達するトルクに耐える強度を持つ厚みのある部品をロボット装置のフレーム側とアクチュエータ側にそれぞれ使用すると小型・軽量化ができない。
これに対し、本発明によれば、ロボット本体の関節部フレームと減速機のケーシングを一体化して構成し、部品として共通化することにより、隙間を極小化して小型・軽量化するとともに高剛性化を実現する。
例えば、減速機として遊星歯車機構を用いることにより、駆動軸と同軸上で減速をすることが可能なため、複段数の連結により強力な減速比を得ることができる。
ここで、減速機として遊星歯車機構を用いる場合、この遊星減速機の内歯歯車のブローチ加工を関節部フレームと一体化した状態で実現できるかが問題となる。本発明では、ロボットの関節部フレームは、軽量化のため、マグネシウム合金を使用する。そして、この関節部フレームに対し、パイプ状の部品からなる内歯スリーブを取り取り付け、フレームとは別の工程で内歯歯車を製作する。この内歯スリーブには、ブローチ加工のし易さと軽量化を考慮して、アルミ材が使用される。
また、ロボット装置が使用されるさまざまな温度環境下において、マグネシウム合金からなる関節部フレームとアルミニウムからなる内歯歯車が熱膨張率の相違により分離することなく、アクチュエータからフレームに伝達する過大なトルクに耐えられる保持力を持つ必要がある。そこで、アルミ製パイプ状の内歯スリーブを圧入、又は接着固定、熱バメ(ロボット・フレームを熱して内歯スリーブを大きな圧入代で固定)し、2部品を伝達トルクに対して十分に保持できる圧入力を生じさせる組立て方法を採用する。
本発明によれば、関節部の駆動のためのアクチュエータ・モータ部分と減速機部分が出力トルクに対し十分な捩り強度を持つことができる、優れたロボット装置並びにロボットの関節装置を提供することができる。
また、本発明によれば、ロボットのフレームやアクチュエータ並びに減速機のケーシング若しくはハウジングの肉厚を増すことなく、十分な捩り強度を得て、小型・軽量化を実現することができる、優れたロボット装置並びにロボットの関節装置を提供することができる。
本発明によれば、ロボットの関節部フレーム内に内歯歯車を設けて、ロボット骨格と遊星減速機を一体化することにより強度の必要な構造部品を集約でき、無駄なスペースがなくなり、軽量且つコンパクトな関節機構ができる。これにより小型・軽量なロボット装置を実現することができる。
また、本発明によれば、駆動機構が回転軸の延長上に存在するので、ベルトドライブやギアトレインなどによって駆動力を回転軸に伝える方式と比べて減速機構、伝達機構の重量部品が回転軸中心に集まり、慣性モーメントが少ない可動関節機構が実現できる。これにより、歩行、ダンスなどのモーションが速い2足歩行エンターテイメント・ロボットを実現することができる。
また、本発明によれば、フレームと内歯の共通化などの部品共通化により大物構成部品を少なくできることから、材料費、組立て工数などのコストダウンが可能となる。
本発明のさらに他の目的、特徴や利点は、後述する本発明の実施形態や添付する図面に基づくより詳細な説明によって明らかになるであろう。
以下、図面を参照しながら本発明の実施形態について詳解する。
図1及び図2には、本発明の一実施形態に係る動作編集システムによる動作編集となる脚式移動ロボットの外観構成を示している。この脚式移動ロボットは、「人間形」又は「人間型」と呼ばれ、図示の通り、脚式移動ロボットは、胴体部と、頭部と、左右の上肢部と、脚式移動を行う左右2足の下肢部とで構成され、例えば胴体に内蔵されている制御部(図示しない)により機体の動作を統括的にコントロールするようになっている。
左右各々の下肢は、大腿部と、膝関節と、脛部と、足首と、足平とで構成され、股関節によって体幹部の略最下端にて連結されている。また、左右各々の上肢は、上腕と、肘関節と、前腕とで構成され、肩関節によって体幹部の上方の左右各側縁にて連結されている。また、頭部は、首関節によって体幹部の略最上端中央に連結されている。
このように構成された脚式移動ロボットは、制御部による全身協調的な動作制御により、2足歩行を実現することができる。かかる2足歩行は、一般に、以下に示す各動作期間に分割される歩行周期を繰り返すことによって行なわれる。すなわち、
(1)右脚を持ち上げた、左脚による単脚支持期
(2)右足が接地した両脚支持期
(3)左脚を持ち上げた、右脚による単脚支持期
(4)左足が接地した両脚支持期
(2)右足が接地した両脚支持期
(3)左脚を持ち上げた、右脚による単脚支持期
(4)左足が接地した両脚支持期
この脚式移動ロボットの関節自由度は、アクチュエータ・モータを用いて実現され、各モータの回転位置、回転量などを取り出して、サーボ制御を行なうことにより、所望の動作パターンを再現するとともに、姿勢制御を行なうようになっている。すなわち、制御部(図示しない)は、各関節アクチュエータの駆動制御や各センサなどからの外部入力を処理するコントローラ(主制御部)や、電源回路その他の周辺機器類を搭載した筐体である。制御部は、その他、遠隔操作用の通信インターフェースや通信装置を含んでいてもよい。
また、アクチュエータ・モータから高出力トルクを得るために、モータ部の出力端に減速部が配設されている(図3を参照のこと)。本実施形態では、減速部には遊星歯車機構が適用される。遊星歯車機構は、恒星としての太陽歯車と、惑星としての遊星歯車と、遊星歯車の公転軌道を規定する内歯歯車で構成される歯車構造であり、この他に、遊星歯車の軸中心をつなぐ遊星キャリアを備えている。遊星歯車機構を用いた減速機によれば、駆動軸と同軸上で減速をすることが可能なため、複段数の連結により強力な減速比を得ることができる。
ここで、アクチュエータのモータ部分と減速機部分が出力トルクに対し十分な捩り強度を持つためには、これらのケース若しくはハウジング類には十分な肉厚が必要となり、アクチュエータの取り付け側であるロボット本体の関節部フレームの肉厚やこれら部品間の隙間を考慮すると、ロボットの小型・軽量化の障害となる、という問題がある。すなわち、伝達するトルクに耐える強度を持つ厚みのある部品がフレーム側とアクチュエータ側にそれぞれ必要であるために小型・軽量化ができない。
これに対し、本実施形態では、ロボット本体の関節部フレームと減速機のケーシングを一体化して構成し、部品として共通化することにより、隙間を極小化して小型・軽量化、並びに高剛性化を図ることにした。
上述したように、減速機に遊星歯車機構を用いた場合、この遊星減速機の内歯歯車のブローチ加工をフレームと一体化した状態で実現できるかがポイントとなる。何故ならば、ロボット本体のフレームは通常軽量化のためにマグネシウム合金で製造されるが、一般にマグネシウム合金にブローチ加工を行なうことができないからである。
遊星歯車の内歯は、通常、鉄系又はアルミニウム系の歯車形状の加工が容易な材質を用いられる。鉄は比重が高く装置の総重量の増大を招来することから、ロボット装置に組み込む場合には、アルミニウムを選択することが好ましいと本発明者らは思料する。
そこで、ロボット装置の各可動関節部位を、具体的には以下のように構成する。すなわち、
(1)ロボットの可動関節部フレームは、軽量化のため、マグネシウム合金を使用する。これに対し、内歯歯車は、ブローチ加工性のため、アルミ材(例えば、A2017)のパイプ状の部品を、内歯スリーブとして、フレームとは別に製作する。これによって、マグネシウムによるロボット・フレームの超軽量化と、遊星減速機部分の内歯のアルミニウムによる軽量化とブローチ加工性を併せて実現することができる。
(2)温度環境下でマグネシウムとアルミニウムの伸び縮みの差が生じても、アクチュエータからフレームに伝達する過大なトルクに耐えられる保持力を持つ必要がある。そこで、アルミ製パイプ状の内歯スリーブを圧入、又は接着固定、熱バメ(ロボット・フレームを熱して内歯スリーブを大きな圧入代で固定)し、2部品を伝達トルクに対して十分に保持できる圧入力を生じさせる組立て方法を採用する。
(3)そして、このような関節部フレームと内歯スリーブの組み立て部材を構成した後、内歯スリーブ内径部を案内に使ってブローチ加工して、フレームと遊星減速機内歯を一体化して構成する。この結果、小型、軽量、高捩り剛性の可動関節を実現することができる。
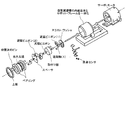
図4には、ロボット装置本体の関節部フレームと一体をなす減速部を備えた関節駆動用アクチュエータ装置の外観構成を示している。また、図5には、このアクチュエータ装置の分解図を示している。
図5に示すように、アクチュエータ装置は、駆動源としてのサーボ・モータの出力軸と同軸状に、遊星歯車機構からなる減速部が取り付けらける。この減速部のケーシングは、遊星減速機の内歯歯車とロボットの関節部フレームとを一体とした構造体であり、マグネシウム合金を型に鋳込むことで製作される。
また、遊星歯車機構は、図示の通り、スラスト・ワッシャー、遊星ピニオン(1)、遊星軸(1)、取付け板、太陽ピニオン、遊星ピニオン(2)、スペーサ、遊星軸(2)、一対のベアリングに挟まれた出力太陽、並びに上板が軸方向に配設され、マグネシウム合金からなる上記の減速部ケーシング内に収容されることにより構成される。
また、減速部のケーシング内部には、サーボ・モータの出力軸の原点を検出するための原点センサやその他の計測機器類も収容される。
このような関節駆動用アクチュエータ装置は、図1並びに図2に示した脚式移動ロボットの各可動関節部位に適用することができる。図6には、この脚式移動ロボットの脚部の構造を取り出して示している。図示の脚部は、大腿部フレームと、脛部フレームと、足平フレームを備えている。
胴体部に接続する腰部フレームの下面には、股関節(ピッチ軸)アクチュエータの出力を減速する減速機用のケーシングが一体的に構成されている。そして、減速機ケーシングの内周には内歯歯車が形設され、図6に示したように遊星歯車機構が内蔵されている。そして、股関節(ピッチ軸)アクチュエータの出力軸は大腿部フレームの上端部に取り付けられている。
また、大腿部フレームの下端には、膝関節(ピッチ軸)アクチュエータの出力を減速する減速機用のケーシングが一体的に構成されている。そして、減速機ケーシングの内周には内歯歯車が形設され、図6に示したように遊星歯車機構が内蔵されている。そして、膝関節(ピッチ軸)アクチュエータの出力軸は脛部フレームの上端部に取り付けられている。
また、足平フレームの上面には、足首関節(ピッチ軸)アクチュエータの出力を減速すると減速機用のケーシングが一体的に構成されている。そして、減速機ケーシングの内周には内歯歯車が形設され、図6に示したように遊星歯車機構が内蔵されている。そして、足首関節(ピッチ軸)アクチュエータの出力軸は脛部フレームの下端部に取り付けられている。
図7には、図4に示したアクチュエータ装置をロボットの脚部に適用した様子を示している。
図示の通り、アクチュエータ装置のサーボ・モータの入力軸は、ベアリング及びストッパを介して一方の膝部フレームに螺着されている。
また、アクチュエータ装置のサーボ・モータの出力軸に取り付けられた減速部の出力軸は、ワッシャーを介して他方の膝部フレームに螺着されている。
図8には、本実施形態に係るアクチュエータ装置をロボット装置の膝部に組み込んだ様子を示している。図示の通り、膝関節を構成する大腿部フレームの下端部において内歯歯車を形設し、ロボットの骨格に相当する大腿部フレームと遊星減速機を一体化することにより、この膝関節部を駆動するためのアクチュエータ・モータ部分と減速機部分が出力トルクに対し十分な捩り強度を持つことができる。
また、このようにロボット骨格と遊星減速機を一体化することにより強度の必要な構造部品を集約でき、無駄なスペースがなくなり、軽量且つコンパクトな関節機構ができる。これにより小型・軽量なロボット装置を実現することができる、という点を十分理解されたい。
また、図7並びに図8に示すような関節部構造によれば、駆動機構が回転軸の延長上に存在するので、ベルトドライブやギアトレインなどによって駆動力を回転軸に伝える方式と比べて減速機構、伝達機構の重量部品が回転軸中心に集まり、慣性モーメントが少ない可動関節機構が実現できる。これにより、歩行、ダンスなどのモーションが速い2足歩行エンターテイメント・ロボットを実現することができる。勿論、フレームと内歯の共通化などの部品共通化により大物構成部品を少なくできることから、材料費、組立て工数などのコストダウンが可能となる。
図9及び図10には、本発明の実施形態に係るロボット装置の関節部構造の斜視図と軸方向断面構成図をそれぞれ示している。既に述べたように、本実施形態においては、関節部フレームと減速機ケーシングが一体的に構成されている。また、図11及び図12には、これとの比較のため、従来の設計方式に基づいて関節部フレームと減速機ケーシングが別個の独立した部品として構成された場合の、関節部構造の斜視図と軸方向断面構成図をそれぞれ示している。
参照番号1は、ベースとなる関節部フレームであり、関節駆動用アクチュエータが取り付けられる。関節駆動用アクチュエータは、アクチュエータ・モータとその出力を減速する減速部で構成される。本実施形態では、減速部は、遊星歯車減速機により構成される。関節部フレーム1は、軽量化のため、マグネシウム合金の鋳造部品として構成される。
参照番号2は減速機ケーシングであり、その内周に沿って遊星歯車の公転軌道を規定する内歯歯車が形設されている。また、参照番号3はアクチュエータ・モータのケーシングである。
減速機ケーシング2、並びにアクチュエータ・モータのケーシング3には<タップ穴を持つ脚となる部分が2つずつ設けられている。図11並びに図12に示した従来の設計方式においては、これらのタップ穴はロボット装置側の関節部フレーム1への取り付けのために使われる。これに対し、本実施形態では、関節部フレーム1と減速機ケーシング2が一体的に構成されることから、これらのタップ穴が不要となる、というメリットがある。図11においては、減速機ケーシング2が図中下方から数本の螺子により関節部フレーム1に螺着されているが、図9では、これが不要である。
参照番号4は、関節駆動用アクチュエータが駆動する対象となる、ロボット装置の他方の関節部フレームである。関節部フレーム4は、対となる関節部フレーム1と同様に、軽量化のため、マグネシウム合金の鋳造部品として構成される。
参照番号5は、内歯スリーブであり、関節部フレームに対し、例えば圧入接着で固定され、アクチュエータからフレームに伝達する過大なトルクに耐えられる保持力が与えられている。この内歯スリーブ5の内径部分はブローチ加工により内歯が切られている。内歯スリーブ5は、軽量であるとともに加工容易性が求められ、本実施形態ではアルミ材質により構成される。
参照番号6は、アクチュエータの出力軸を回動可能に支持するための軸受けであり、その内輪を出力太陽7に圧入されている。
参照番号8は、軸受け6をアクチュエータの軸方向にて支持する上板である。本実施形態では、この上板8は可撓性を持つ板バネで構成されており、この板バネの弾性力若しくは復元力を利用して、軸受け6及び出力太陽7に予圧を印加し、出力太陽7に回転剛性を与える構成となっている。
参照番号9は、位置決めピンであり、出力太陽7に圧入され、出力太陽7と駆動対象部品(図示の例では関節フレーム4)との位相関係を規定する役目を持つ。
参照番号10は、出力段側遊星軸である。図示の例では、出力太陽7に対し、3本の出力段側遊星軸10が円周上で均等に配置され、圧入されている、
参照番号11は、出力段側遊星ピニオンであり、その表面をグリース(潤滑油)で十分に潤滑されてから、出力段側遊星軸10に取り付けられる。
参照番号12は、太陽ピニオンであり、取り付け板13により圧入されている。
参照番号14は、入力段側遊星軸である。図示の例では、3本の入力段側遊星軸14が円周上で均等に配置され、圧入されている、
参照番号15は、入力段側遊星ピニオンであり、その表面をグリース(潤滑油)で十分に潤滑されてから、入力段側遊星軸14に取り付けられる。
ここで、キャリア・プレート上の3本の入力段遊星軸14と太陽ピニオン12の間の平行度並びに同芯度を十分に高い精度(例えば50μm以下)に抑えることが、遊星ピニオン11、15や内歯の摩滅を防ぐ上で必要になる。
参照番号16は入力ピニオン、参照番号17は、アクチュエータ・モータ側のケーシング3と入力段側遊星ピニオン15の間の摩擦を減らすために挿設された胴ワッシャーである。また、参照番号18はアクチュエータ・モータのケーシング3用のベアリングであり、参照番号19はアクチュエータ・モータの固定子巻き線組み立て部品である。これらをアクチュエータ・モータ側のケーシング3内に圧入接着により固定された上で、駆動用のコイル巻き線の振動を抑制するために、粘度の高い接着剤により含浸固定される。
参照番号20は、アクチュエータ・モータの回転子マグネット組み立て部品であり、段付き軸とマグネットを接着固定した後に、マグネットを着磁磁化して使用する。
参照番号21は、駆動基板であり、回転子マグネットへの駆動電流(モータ電流)を制御する。
参照番号22は、側板であり、アクチュエータ・モータのケーシング3内部にすべての部品を組み込んだ後に内部を隠蔽する(蓋をする)ために用いられる。
参照番号23は、ボール・ベアリングであり、回転子マグネット20を回転可能に軸支する。
参照番号24は、通信基板であり、外部システムとの通信と、回転センサ基板25から出力される回転子マグネット20の回転状態の情報を受信し、駆動基板21への信号や電源の供給を行なう。
回転センサ基板25は、回転子マグネット20の端面に取り付けられたマグネットの磁気を感知するセンサ(ホール素子)を搭載している。
参照番号26は、回転子マグネット20の回転位相の原点を感知する原点センサである。
続いて、減速機ケーシング2に内歯スリーブ5を取り付けて内歯歯車を形設することにより、ベース側の関節部フレーム1と減速機ケーシング2を一体化するための製作手順について説明する。
関節部フレーム1は、その比強度の高さからマグネシウム合金(例えばAZ91D)が用いられる。但し、マグネシウム合金に直接ブローチ加工をして内歯を生成することができない。代替の工程について、図13〜図18を参照しながら説明する。
(1)まず、パイ部状の部品からなる内歯スリーブを製作する。内歯スリーブ5には、加工性の良さからアルミニウム(例えばA2017)が用いられ、ブローチ加工によりその内周に内歯歯車が形設される。
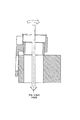
(2)次いで、ロボットの関節部フレーム1(マグネシウム合金)に内歯スリーブ5(A2017)を圧入又は接着固定、熱バメ(ロボットの関節部フレーム1を熱して内歯スリーブを大きな圧入代で固定)する(図13を参照のこと)。
このような内歯スリーブ5の取り付け方法により、ロボットの関節部装置として完成し、通常の装置駆動により想定されるさまざまな温度環境下でマグネシウムとアルミニウムの伸び縮みの差が生じても、マグネシウム合金からなる関節部フレームとアルミニウムからなる内歯歯車が熱膨張率の相違により分離することなく、アクチュエータからフレームに伝達する過大なトルクに耐えられる保持力を得ることができる。
ここで、外径φ25〜30mmのパイプ材を製品使用温度環境下で十分な保持力を与えるだけの圧入代で圧入するためには数百キロの圧入力が必要になる。そこで、事前にロボットの関節部フレーム1のマグネシウム合金を加熱して熱膨張させ、その内径を内歯スリーブ5の外径よりも大きくした状態を形成した後、瞬間的に隙間バメする根ツバメの方が良好な圧入が可能なので好ましい。圧入の良し悪しがブローチ加工や遊星ギアの出来具合に影響するので、安定した圧入作業が要求される。
(3)次いで、内歯スリーブ5とロボット側の関節部フレーム1の内歯スリーブ内径部を案内に使って、内歯スリーブのパイプの内周にブローチ加工を施し、内歯歯車を形設する(図14を参照のこと)。
このとき、関節部フレームをセッティングする際(図16を参照のこと)、内歯スリーブ5とロボット側の関節部フレーム1単体で立てるには形状的なバランスがよくないので(図17を参照のこと)、冶具に内歯スリーブ内径部が加工する円筒の端面を全周均等に受けて直角に立つような工夫することが必要になる(図18を参照のこと)。
図17に示したように、安定したセッティングが出来ないと、ブローチ加工中の切削抵抗によってサンプルが傾き、内歯が曲がってあけられてしまう。すると内部に組みつけられる遊星ピニオンとの接触若しくは隙間関係が設計通りにならない。最悪の場合、部品を組み付けるためのすきますら確保できず、組み立て不能となってしまう。また、接触若しくは隙間関係が設計通りでないと、設計目標のバックラッシュ、バックドライブを実現できなかったり、減速機運転中に短時間で歯が摩滅してしまったりすることになる。
(4)最後に、バリ取りを行ない、組み上がった状態で洗浄する(図15を参照のこと)。以上の工程により、減速機ケーシング2と一体化した関節部フレーム1が完成する。
本明細書では、特定の実施形態を参照しながら、本発明について詳解してきた。しかしながら、本発明の要旨を逸脱しない範囲で当業者が該実施形態の修正や代用を成し得ることは自明である。
本発明の要旨は、必ずしも「ロボット」と称される製品には限定されない。すなわち、電気的若しくは磁気的な作用を用いて人間の動作に似せた運動を行なう機械装置あるいはその他一般的な移動体装置であるならば、例えば玩具などのような他の産業分野に属する製品であっても、同様に本発明を適用することができる。
要するに、例示という形態で本発明を開示してきたのであり、本明細書の記載内容を限定的に解釈するべきではない。本発明の要旨を判断するためには、冒頭に記載した特許請求の範囲の欄を参酌すべきである。
1…関節部フレーム(ベース)
2…減速機ケーシング
3…アクチュエータ・モータのケーシング
4…関節部フレーム(駆動対象部品)
5…内歯スリーブ
6…軸受け
7…出力太陽
8…上板(板バネ)
9…位置決めピン
10…出力段側遊星軸
11…出力段側遊星ピニオン
12…太陽ピニオン
13…取り付け板
14…入力段側遊星軸
15…入力段側遊星ピニオン
16…入力ピニオン
17…胴ワッシャー
18…ベアリング
19…固定子コア巻き線組み立て部品
20…回転子マグネット組み立て部品
21…駆動基板
22…側板
23…ボール・ベアリング
24…通信基盤
25…回転センサ基板
26…原点センサ
2…減速機ケーシング
3…アクチュエータ・モータのケーシング
4…関節部フレーム(駆動対象部品)
5…内歯スリーブ
6…軸受け
7…出力太陽
8…上板(板バネ)
9…位置決めピン
10…出力段側遊星軸
11…出力段側遊星ピニオン
12…太陽ピニオン
13…取り付け板
14…入力段側遊星軸
15…入力段側遊星ピニオン
16…入力ピニオン
17…胴ワッシャー
18…ベアリング
19…固定子コア巻き線組み立て部品
20…回転子マグネット組み立て部品
21…駆動基板
22…側板
23…ボール・ベアリング
24…通信基盤
25…回転センサ基板
26…原点センサ
Claims (12)
- 複数の関節部を備えたロボット装置において、
関節を駆動するアクチュエータのモータ部と、
前記モータ部の出力端に配設された減速部と、
前記減速部のケーシングと一体的に構成された関節部フレームと、
を具備することを特徴とするロボット装置。 - 前記減速部は、恒星としての太陽歯車と、惑星としての遊星歯車と、遊星歯車の公転軌道を規定する内歯歯車からなる遊星歯車機構により構成される、
ことを特徴とする請求項1に記載のロボット装置。 - 前記関節部フレームは、前記モータ部の取付部位を有する関節部フレーム本体と、前記遊星歯車機構の内歯歯車部を備える、
ことを特徴とする請求項2に記載のロボット装置。 - 前記関節部フレームは、パイプ状の部品からなる内歯スリーブを収容する内歯収容部を備え、
前記内歯歯車部は、前記内歯収容部に収容された内歯スリーブ内径部を案内に使ってブローチ加工を施して形設される、
ことを特徴とする請求項3に記載のロボット装置。 - 前記内歯スリーブを圧入、又は接着固定、熱バメにより前記関節部フレームの内歯収容部に取り付ける、
ことを特徴とする請求項3に記載のロボット装置。 - 前記関節部フレームはマグネシウム合金により構成され、前記内歯スリーブはアルミニウム系材質により構成される、
ことを特徴とする請求項3に記載のロボット装置。 - ロボットの関節自由度を構成する関節装置において、
関節を駆動するアクチュエータのモータ部と、
前記モータ部の出力端に配設された減速部と、
前記ロボットの関節部フレームと一体的に構成された前記減速部のケーシングと、
を具備することを特徴とするロボットのための関節装置。 - 前記減速部は、恒星としての太陽歯車と、惑星としての遊星歯車と、遊星歯車の公転軌道を規定する内歯歯車からなる遊星歯車機構により構成される、
ことを特徴とする請求項7に記載のロボットのための関節装置。 - 前記減速部のケーシングは、前記モータ部の取付部位と、前記遊星歯車機構の内歯歯車部を備える、
ことを特徴とする請求項8に記載のロボットのための関節装置。 - 前記減速部のケーシングは、パイプ状の部品からなる内歯スリーブを収容する内歯収容部を備え、
前記内歯歯車部は、前記内歯収容部に収容された内歯スリーブ内径部を案内に使ってブローチ加工を施して形設される、
ことを特徴とする請求項9に記載のロボットのための関節装置。 - 前記内歯スリーブを圧入、又は接着固定、熱バメにより前記減速部のケーシングの内歯収容部に取り付ける、
ことを特徴とする請求項9に記載のロボットのための関節装置。 - 前記減速部のケーシングはマグネシウム合金により構成され、前記内歯スリーブはアルミニウム系材質により構成される、
ことを特徴とする請求項9に記載のロボットのための関節装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004112596A JP2005297079A (ja) | 2004-04-06 | 2004-04-06 | ロボット装置並びにロボットの関節装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004112596A JP2005297079A (ja) | 2004-04-06 | 2004-04-06 | ロボット装置並びにロボットの関節装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297079A true JP2005297079A (ja) | 2005-10-27 |
Family
ID=35329250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004112596A Pending JP2005297079A (ja) | 2004-04-06 | 2004-04-06 | ロボット装置並びにロボットの関節装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297079A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015151842A1 (ja) * | 2014-04-03 | 2015-10-08 | ナブテスコ株式会社 | ヒューマノイドロボットの関節機構 |
| WO2015151843A1 (ja) * | 2014-04-03 | 2015-10-08 | ナブテスコ株式会社 | ヒューマノイドロボットの関節機構 |
| CN111355331A (zh) * | 2018-12-21 | 2020-06-30 | 日本电产株式会社 | 致动器 |
| WO2024140199A1 (zh) * | 2022-12-30 | 2024-07-04 | 北京石头世纪科技股份有限公司 | 机械关节、机械臂和自移动清洁设备 |
-
2004
- 2004-04-06 JP JP2004112596A patent/JP2005297079A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015151842A1 (ja) * | 2014-04-03 | 2015-10-08 | ナブテスコ株式会社 | ヒューマノイドロボットの関節機構 |
| WO2015151843A1 (ja) * | 2014-04-03 | 2015-10-08 | ナブテスコ株式会社 | ヒューマノイドロボットの関節機構 |
| JP2015196238A (ja) * | 2014-04-03 | 2015-11-09 | ナブテスコ株式会社 | ヒューマノイドロボットの関節機構 |
| JP2015196237A (ja) * | 2014-04-03 | 2015-11-09 | ナブテスコ株式会社 | ヒューマノイドロボットの関節機構 |
| CN111355331A (zh) * | 2018-12-21 | 2020-06-30 | 日本电产株式会社 | 致动器 |
| JP2020102939A (ja) * | 2018-12-21 | 2020-07-02 | 日本電産株式会社 | アクチュエータ |
| CN111355331B (zh) * | 2018-12-21 | 2022-10-21 | 日本电产株式会社 | 致动器 |
| WO2024140199A1 (zh) * | 2022-12-30 | 2024-07-04 | 北京石头世纪科技股份有限公司 | 机械关节、机械臂和自移动清洁设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7288926B2 (ja) | 脚付きロボット用のねじアクチュエータ | |
| JP6859434B2 (ja) | 脚付きロボット用の一体化された過負荷保護を有する伝動装置 | |
| US9879760B2 (en) | Rotary actuator with shortest force path configuration | |
| KR0178812B1 (ko) | 조합된 가속기어유닛을 구비한 산업용 로보트 | |
| JP2021182862A (ja) | 脚付きロボット用のモーターおよびコントローラ一体化 | |
| JP5528207B2 (ja) | リンク作動装置 | |
| US5355743A (en) | Robot and robot actuator module therefor | |
| JP2006507464A (ja) | 標準化された回転アクチュエータ | |
| EP2532927B1 (en) | Modular rotational electric actuator | |
| WO2020078158A1 (zh) | 机器人双关节单元及应用其的足式机器人和协作机械臂 | |
| US12564940B2 (en) | Screw actuator | |
| CN101112760A (zh) | 空间机械臂模块化关节 | |
| US20240217096A1 (en) | Robotic Joint Actuator | |
| CN106132641A (zh) | 类人机器人的关节机构 | |
| CN114800602A (zh) | 一种具有柔性元件的紧凑型变刚度关节模组 | |
| CN112405606B (zh) | 一种带机械锁定功能的五自由度分时驱动助力机械臂 | |
| JP2005297079A (ja) | ロボット装置並びにロボットの関節装置 | |
| CN112104149A (zh) | 一种双足机器人模块化关节 | |
| JP2005297081A (ja) | ロボット装置並びにロボットの関節装置 | |
| JP2005297080A (ja) | ロボット装置並びにロボットの関節装置 | |
| CN112659175B (zh) | 流线型外壳包络的关节 | |
| CN213566217U (zh) | 关节驱动机构及机器人 | |
| CN121468652B (en) | Multi-mode robot elbow joint mechanism | |
| CN114952926A (zh) | 一种紧凑型一体式双关节模组 | |
| CN224144687U (zh) | 一种关节结构及机器人 |