JP2005296765A - Human body vibration device - Google Patents
Human body vibration device Download PDFInfo
- Publication number
- JP2005296765A JP2005296765A JP2004114943A JP2004114943A JP2005296765A JP 2005296765 A JP2005296765 A JP 2005296765A JP 2004114943 A JP2004114943 A JP 2004114943A JP 2004114943 A JP2004114943 A JP 2004114943A JP 2005296765 A JP2005296765 A JP 2005296765A
- Authority
- JP
- Japan
- Prior art keywords
- human body
- vibration
- amplitude
- resonance frequency
- phase difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims description 4
- 239000003638 chemical reducing agent Substances 0.000 description 7
- 239000007787 solid Substances 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000036541 health Effects 0.000 description 4
- 210000001624 hip Anatomy 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 210000002414 leg Anatomy 0.000 description 3
- 230000017531 blood circulation Effects 0.000 description 2
- 210000000689 upper leg Anatomy 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images


Landscapes
- Percussion Or Vibration Massage (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Abstract
Description
本発明は、人体の下半身と上半身との間にねじり振動を生じさせるための人体振動装置に関するものである。 The present invention relates to a human body vibration device for generating torsional vibration between a lower body and an upper body of a human body.
近時における健康志向により、種々形態の健康機器が提案されるに至っており、例えば棒状部材等にぶら下がって健康増進を図るもの、或いは脚や腰等に振動を付与して当該部位の血行を良くするもの等が提供されている。特に、脚や腰等に振動を付与するものにおいては、その多くは振動付与手段を有した人体振動装置から成り、ベルト等を介して人体に振動を付与するものであった。尚、かかる先行技術は、文献公知発明に係るものでないため、記載すべき先行技術文献情報はない。 Due to the recent health orientation, various types of health devices have been proposed, such as those that are hung on a rod-like member or the like to improve health, or that vibration is applied to the legs or waist to improve blood circulation at the site. What to do is provided. In particular, many devices that apply vibrations to legs, waists, and the like are composed of a human body vibration device having vibration applying means and apply vibrations to the human body via a belt or the like. In addition, since this prior art does not relate to the literature known invention, there is no prior art document information to be described.
しかしながら、上記従来の人体振動装置においては、付与される振動により血行をよくし健康増進を図るものであり、全身運動を図るものではなかった。ところで、全身運動として、下半身と上半身との間にねじりを生じさせる運動が健康によいことが知られており、本出願人は、かかる運動を人体振動装置にて行わせることを検討した。 However, in the conventional human body vibration device, blood circulation is improved by the applied vibration to promote health, and the whole body exercise is not intended. By the way, it is known that as a whole body exercise, an exercise that causes torsion between the lower body and the upper body is known to be healthy, and the applicant of the present application has studied to perform such an exercise with a human body vibration device.
本発明は、このような事情に鑑みてなされたもので、簡易且つ有効的に上半身と下半身との間のねじり運動を行わせることができる人体振動装置を提供することにある。 This invention is made | formed in view of such a situation, and it is providing the human body vibration apparatus which can perform the torsional motion between an upper half body and a lower half body simply and effectively.
請求項1記載の発明は、人体の下半身に対して外部から振動を付与する振動付与手段を具備し、当該人体の下半身と上半身との間にねじり振動を生じさせる人体振動装置であって、前記振動付与手段は、人体の特性に基づき予め求められ、当該人体の上半身と下半身との位相差及び振幅が共に大となる近共振振動数にて振動を付与することを特徴とする。ここで、位相差が共振振動数より若干高い振動数で極大となり、且つ、振幅が共振振動数にて極大となることから、当該位相差及び振幅が共に大である近共振振動数とは、共振振動数より若干高い振動数をいう。
The invention according to
請求項2記載の発明は、請求項1記載の人体振動装置において、前記振動付与手段は、直立した人体の足下に対して振動を付与するものであることを特徴とする。 According to a second aspect of the present invention, in the human body vibration device according to the first aspect, the vibration imparting means imparts vibrations to the feet of an upright human body.
請求項3記載の発明は、請求項1記載の人体振動装置において、前記振動付与手段は、着座した人体の着座部に対して振動を付与するものであることを特徴とする。 According to a third aspect of the present invention, in the human body vibration device according to the first aspect, the vibration imparting means imparts vibration to a seating portion of the seated human body.
請求項4記載の発明は、請求項2又は請求項3に記載の人体振動装置において、前記近共振振動数は、直立した人体については略2〜7Hz、着座した人体については略1〜4Hzとされたことを特徴とする。 According to a fourth aspect of the present invention, in the human body vibration device according to the second or third aspect, the near resonance frequency is about 2 to 7 Hz for an upright human body and about 1 to 4 Hz for a seated human body. It is characterized by that.
請求項5記載の発明は、請求項1〜請求項4の何れか1つに記載の人体振動装置において、前記振動付与手段にて振動が付与された人体における下半身と上半身との位相差及び振幅を検知する検知手段を具備したことを特徴とする。 According to a fifth aspect of the present invention, in the human body vibration device according to any one of the first to fourth aspects, a phase difference and an amplitude between a lower body and an upper body in a human body to which vibration is applied by the vibration applying unit. It has a detecting means for detecting the above.
請求項1の発明によれば、人体の特性に基づき予め求められ、当該人体の上半身と下半身との位相差及び振幅が共に大となる近共振振動数にて振動を付与するので、簡易且つ有効的に上半身と下半身との間のねじり運動を行わせることができる。 According to the first aspect of the present invention, vibration is applied at a near-resonance frequency that is obtained in advance based on the characteristics of the human body and has a large phase difference and amplitude between the upper and lower body of the human body. Thus, the torsional movement between the upper body and the lower body can be performed.
請求項2の発明によれば、直立した人体の足下に対して振動を付与するので、振動付与手段の構成を簡素化することができる。 According to the second aspect of the present invention, since vibration is applied to the feet of an upright human body, the configuration of the vibration applying means can be simplified.
請求項3の発明によれば、着座した人体の着座部に対して振動を付与するので、自然で楽な姿勢にて上半身と下半身との間のねじり運動を行わせることができる。また、着座して振動が付与されるので、直立したものに比べ、年齢や体力など人体の特性に関わらず安定してねじり運動を行わせることができる。
According to the invention of
請求項4の発明によれば、近共振振動数が、直立した人体については略2〜7Hz、着座した人体については略1〜4Hzとされているので、より幅広い人体に適用することができる。 According to the fourth aspect of the present invention, the near resonance frequency is about 2 to 7 Hz for an upright human body and about 1 to 4 Hz for a seated human body, so that it can be applied to a wider human body.
請求項5の発明によれば、振動が付与された人体における下半身と上半身との位相差及び振幅を検知する検知手段を具備したので、該検知手段で検知された位相差及び振幅と振動付与手段で振動を付与するため予め求められた近共振振動数とを比較すれば、適正にねじり運動がなされているか否かが判定できるとともに、人体の柔らかさを判別することができる。
According to the invention of
以下、本発明の実施形態について図面を参照しながら具体的に説明する。
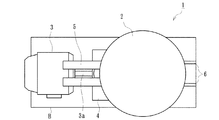
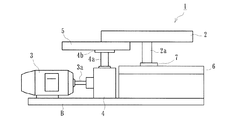
第1の実施形態に係る人体振動装置は、人体の下半身と上半身との間にねじり振動を生じさせるためのものであり、図1及び図2に示すように、振動付与手段1により主に構成されている。かかる振動付与手段1は、人を載置可能とされた円板状の載置台2と、モータ3と、減速機4と、レバー5と、ベアリング8(図3参照)とをベースB上に配設して構成されている。
Hereinafter, embodiments of the present invention will be specifically described with reference to the drawings.
The human body vibration device according to the first embodiment is for generating a torsional vibration between the lower body and upper body of the human body, and is mainly composed of
載置台2は、その裏面における中心から下方に延びた軸部材2aを中心に回転振動(揺動)可能とされたもので、人が載っても耐え得る強度とされている。また、載置台2の裏面には、互いに所定寸法離間しつつ側方に延びる一対のレバー5が固設されており、該レバー5に付与された駆動力により当該載置台2が回転振動するよう構成されている。尚、本実施形態における載置台2は、円板状とされているが、人を載置可能であれば他の形状(例えば矩形状)のものとしてもよい。
The mounting table 2 is capable of rotational vibration (swing) around a
モータ3は、振動付与手段1の駆動源を成し、図示しない電源に接続されることにより、一定の回転数で出力軸3aを回転可能とされたものである。かかる出力軸3aの先端は、減速機4に接続されており、モータ3の駆動力が当該減速機4にて減速されつつ出力軸4aに伝達されるよう構成されている。この減速機4の出力軸4aは、上方に延設されており、ベアリング8を有したクランク4bが先端に形成されている。
The
ベアリング8は、クランク4bの中心から所定寸法オフセットして配設されており、図3に示すように、一対のレバー5により挟持された状態とされる。これにより、モータ3を駆動すると、その回転駆動力が減速機4を介してクランク4bに伝達され、ベアリング8の動作によりレバー5及び載置台2が所定の振動数で回転振動され得るようになっている。尚、載置台2の回転振動を振動aと呼ぶこととする。
The bearing 8 is disposed with a predetermined dimension offset from the center of the
また、モータ3の回転数を図示しないダイヤル又はスイッチボタン等を操作することに設定できるようになっており、振動aの振動数を近共振振動数に設定することができるよう構成されている。
Further, the number of rotations of the
更に、載置台2の軸部材2aの下端には、レール6上を摺動し得るスライダ7が配設されており、載置台2を回転自在としつつクランク4bとの離間寸法を変更し得るようになっている。即ち、スライダ7を摺動させて、載置台2の回転中心(軸部材2a)とクランク4bの回転中心との間の長さt(図3参照)を変えることにより、ベアリング8のレバー5に対する当接位置を変更することができ、これにより載置台2の揺動角を変更可能としているのである。
Further, a
かかる揺動角は、2〜8度程度が好ましく、本実施形態(第2の実施形態も同様)においては6度に設定されている。即ち、揺動角を2度以下に設定すると、人体の上半身と下半身とのねじり運動が不十分となり、8度以上に設定すると、ねじり運動が過大となって、却って人体に悪影響を及ぼす虞があるからである。 Such a swing angle is preferably about 2 to 8 degrees, and is set to 6 degrees in the present embodiment (the same applies to the second embodiment). That is, if the swing angle is set to 2 degrees or less, the torsional motion between the upper body and the lower body of the human body becomes insufficient, and if it is set to 8 degrees or more, the torsional motion becomes excessive, which may adversely affect the human body. Because there is.
従って、モータ3の回転数を設定することにより任意に振動数を近共振振動数に設定することができるとともに、スライダ7を任意位置とすることにより、載置台2における回転振動の振幅を容易に設定することができる。ベアリング8は、ローラベアリングやニードルベアリング等種々のものを使用することができるとともに、レバー5と当接しつつ摺動して、相対的な当接位置を変更し得るものであれば単なる凸形状部等であってもよい。
Therefore, by setting the rotation speed of the
ここで、本実施形態においては、載置台2上に直立した人体の足下に対して所定の振動a(回転振動)を付与することにより、人体の上半身と下半身との間にねじり振動を生じさせるよう構成されており、具体的には、振動付与手段1にて人体Hに付与される振動aが、人体の特性に基づき予め求められ、当該人体の上半身と下半身との位相差及び振幅が共に大となる近共振振動数とされている。
Here, in the present embodiment, torsional vibration is generated between the upper body and the lower body of the human body by applying a predetermined vibration a (rotational vibration) to the foot of the human body standing upright on the mounting table 2. Specifically, the vibration a applied to the human body H by the
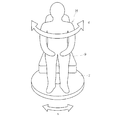
即ち、図4に示すように、載置台2上の人体Hに対し振動aを付与すると、人体Hの大腿部(下半身)の回転振動b、腰部(下半身)の回転振動c及び胸部(上半身)の回転振動dが生じることとなるので、回転振動b及びcに対して回転振動dが逆位相(位相差が極大)であって振幅が極大となれば、上半身と下半身との間に大きなねじりが加えられたこととなる。このように、位相差及び振幅を共に大とするべく載置台2に加えられる振動aの振動数を近共振振動数と呼ぶこととし、当該近共振振動数を求めるための実験について以下に説明する。 That is, as shown in FIG. 4, when vibration a is applied to the human body H on the mounting table 2, rotational vibration b of the thigh (lower half) of the human body H, rotational vibration c of the waist (lower half), and chest (upper body). ), The rotation vibration d is opposite in phase to the rotation vibrations b and c (the phase difference is maximal) and the amplitude is maximal, so that the vibration is large between the upper body and the lower body. A twist was added. Thus, the frequency of the vibration a applied to the mounting table 2 so as to increase both the phase difference and the amplitude will be referred to as a near resonance frequency, and an experiment for obtaining the near resonance frequency will be described below. .
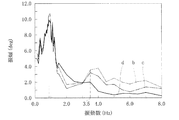
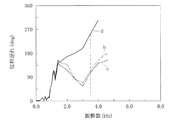
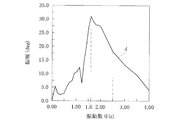
まず、載置台2、人体Hの大腿部、腰部及び胸部のそれぞれに光学式ポジションセンサを取り付けるとともに、当該人体H(若年者)を直立した状態(腕は組んだ状態)にて載置台2上に載せ、載置台2の振動aを任意変えつつモータ3を駆動した。その結果として、若年者における各部位の振幅特性(振動aの振動数−各部位の振幅)を図5に、位相遅れ(振動aの振動数−各部位の位相遅れ)を図6に示す。これら実験結果からも分かるように、若年の人体Hの上半身と下半身との位相差は3(Hz)から大となり、振幅は3.5(Hz)で極大となるので、これらが共に大となる近共振振動数は、3.5〜4(Hz)程度であることが分かる。尚、特に図5において、振動aの振動数が0.8(Hz)でも振幅が極大となっているが、かかる振動数では、振動aと他の振動b〜dとの位相差であり、上半身と下半身との間の位相差でない(足下とそれより上の部位との位相差である)ことが明らかである。
First, an optical position sensor is attached to each of the mounting table 2 and the thigh, waist, and chest of the human body H, and the human body H (young person) stands upright (arms are assembled). The
一方、人体Hを高齢者として同様の実験をし、その結果を図7(振幅特性)及び図8(位相遅れ)に示す。かかる実験結果からも分かるように、老齢の人体Hの上半身と下半身との位相差及び振幅が共に大となる近共振振動数が5〜5.5(Hz)程度であることが分かる。 On the other hand, the same experiment was conducted with the human body H as an elderly person, and the results are shown in FIG. 7 (amplitude characteristics) and FIG. 8 (phase delay). As can be seen from the experimental results, it can be seen that the near-resonance frequency at which the phase difference and amplitude between the upper and lower bodies of the old human body H are large is about 5 to 5.5 (Hz).
このように、人体の特性から予め近共振振動数が求められるため、かかる近共振振動数にて振動付与手段1から人体に回転振動を付与すれば、人体の上半身と下半身との位相差及び振幅が共に大となり、簡易且つ有効的に上半身と下半身との間のねじり運動を行わせることができる。また、本実施形態によれば、直立した人体の足下に対して振動を付与するので、振動付与手段1の構成を簡素化することができる。更に、近共振振動数を略2〜7(Hz)程度に設定すれば、若年者から高齢者までより幅広い人体に適用することができる。
As described above, since the near resonance frequency is obtained in advance from the characteristics of the human body, if rotational vibration is applied to the human body from the
次に、本発明に係る第2の実施形態について説明する。
本実施形態に係る振動付与手段は、第1の実施形態とほぼ同様の構成とされているものの、図9に示すように、載置台2上に人体Hが着座し得る椅子9が配設されたものである。そして、載置台2を近共振振動数にて回転振動させ、着座した人体Hの着座部(尻下)に対して振動を付与することにより、図10に示すように、振動aにより着座した人体Hの胸部に振動dを生じさせるよう構成されている。
Next, a second embodiment according to the present invention will be described.
Although the vibration applying means according to the present embodiment has substantially the same configuration as that of the first embodiment, as shown in FIG. 9, a
即ち、載置台2上において椅子9に着座した人体Hに振動aを付与すると、人体Hの胸部(上半身)の回転振動dが生じることとなるので、回転振動aに対して回転振動dが逆位相(位相差が極大)であり振幅が極大となれば、上半身と下半身との間に大きなねじりが加えられたこととなる。このときの近共振振動数を求めるための実験について以下に説明する。
That is, when vibration a is applied to the human body H seated on the
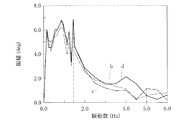
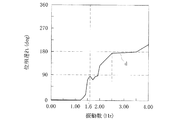
まず、載置台2及び人体Hの胸部のそれぞれに光学式ポジションセンサを取り付けるとともに、当該人体Hを椅子に着座させ、載置台2の振動aを任意変えつつモータ3を駆動した。その結果として、胸部の振幅特性(振動aの振動数−各部位の振幅)を図11に、位相遅れ(振動aの振動数−各部位の位相遅れ)を図12に示す。これら実験結果からも分かるように、着座した状態の人体Hの上半身と下半身との位相差は2.5Hz程度で最大となり、振幅は1.6(Hz)程度で極大となるので、共振振動数は1.6Hz近傍であることが分かる。
First, an optical position sensor was attached to each of the mounting table 2 and the chest of the human body H, the human body H was seated on a chair, and the
このように、人体の特性から予め近共振振動数が求められるため、第1の実施形態と同様、近共振振動数(本実験においては1.6〜2.5Hzの間)にて振動付与手段1から人体に回転振動を付与すれば、人体の上半身と下半身との位相差及び振幅が共に大となり、簡易且つ有効的に上半身と下半身との間のねじり運動を行わせることができる。また、本実施形態によれば、着座した人体の着座部に対して振動を付与するので、自然で楽な姿勢にて上半身と下半身との間のねじり運動を行わせることができる。更に、着座して振動が付与されるので、直立したものに比べ、年齢や体力など人体の特性に関わらず安定してねじり運動を行わせることができる。尚、近共振振動数を略1〜4(Hz)程度に設定すれば、第1の実施形態と同様、幅広い人体に適用することができる。 As described above, since the near resonance frequency is obtained in advance from the characteristics of the human body, the vibration applying means is used at the near resonance frequency (between 1.6 and 2.5 Hz in this experiment) as in the first embodiment. If rotational vibration is applied from 1 to the human body, the phase difference and amplitude between the upper body and lower body of the human body both increase, and a torsional motion between the upper body and lower body can be performed easily and effectively. In addition, according to the present embodiment, vibration is applied to the seated portion of the seated human body, so that the torsional motion between the upper body and the lower body can be performed in a natural and easy posture. Furthermore, since the vibration is applied by sitting, the torsional motion can be stably performed regardless of the characteristics of the human body such as age and physical strength, compared to the case of standing upright. In addition, if the near resonance frequency is set to about 1 to 4 (Hz), it can be applied to a wide range of human bodies as in the first embodiment.
以上、本実施形態について説明したが、本発明はこれらに限定されるものではなく、例えば振動付与手段1にて回転振動が付与された人体における下半身と上半身との位相差及び振幅を検知する検知手段を具備した人体振動装置としてもよい。例えば、上記実験にて行われたような光学式ポジションセンサを人体の各部に配設しておき、かかる光学式ポジションセンサで検知された位相差及び振幅と振動付与手段1で回転振動を付与するため予め求められた近共振振動数となるべき位相差及び振幅とを比較すれば、適正にねじり運動がなされているか否かが判定できる。
Although the present embodiment has been described above, the present invention is not limited thereto. For example, detection for detecting the phase difference and amplitude between the lower body and the upper body of a human body to which rotational vibration is applied by the
即ち、上記実施形態において上半身と下半身との位相差及び振幅が共に大となる近共振振動数が求められているため、当該近共振振動数が検知手段にて検知された位相差及び振幅に基づく近共振振動数に比べて高いと、人体が硬いといった特性が分かるのである。尚、高齢となれば近共振振動数が高くなることが、上記実験結果より分かっている。 That is, in the above-described embodiment, a near resonance frequency in which both the phase difference and amplitude between the upper body and the lower body are large is obtained, and therefore the near resonance frequency is based on the phase difference and amplitude detected by the detection means. When the frequency is higher than the near resonance frequency, it is understood that the human body is hard. In addition, it turns out from the said experimental result that near resonance frequency becomes high if it is elderly.
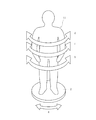
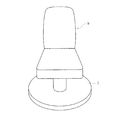
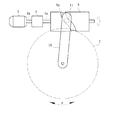
更に、振動付与手段1は、本実施形態に係るものとは異なる機構を採用してもよい。例えば、図13に示すように、載置台2の中心から延びるアーム10と、該アーム10の先端近傍に配設されたローラ11と、円筒状に形成され、その側面に所定軌跡の溝9aが形成された立体カム9と、該立体カム9を回転駆動させるためのモータ3及び減速機4とを具備した振動付与手段とし、ローラ11を立体カム9の溝9a内に配設させるようにしてもよい。
Furthermore, the
かかる構成によれば、モータ3を駆動させると、その回転駆動力が減速機4を介して立体カム9に伝達されて回転するので、ローラ11が溝9aの軌跡に沿って移動し、アーム11を介して載置台2を回転振動させることができる。これにより、より小型な振動付与手段とすることができ、人体振動装置全体を小型化することができる。尚、側面に溝が形成された立体カム9の他、同様の軌跡の凸条部を側面に形成した立体カムとするとともに、該凸条部を挟持させた一対のローラがアーム11に形成されたものとしてもよい。
According to this configuration, when the
振動付与手段が、人体の特性に基づき予め求められ、当該人体の上半身と下半身との位相差及び振幅が共に大となる近共振振動数にて振動を付与する人体振動装置であれば、外観形状が異なるもの或いは他の機能が付加されたものであっても適用することができる。 If the vibration applying means is a human body vibration device that is obtained in advance based on the characteristics of the human body and applies vibration at a near resonance frequency in which both the phase difference and amplitude between the upper and lower body of the human body are large, the external shape It is possible to apply even if they are different or have other functions added.
1 振動付与手段
2 載置台
3 モータ
4 減速機
5 レバー
6 レール
7 スライダ
8 ベアリング
9 立体カム
9a 溝
10 アーム
11 ローラ
DESCRIPTION OF
Claims (5)
前記振動付与手段は、人体の特性に基づき予め求められ、当該人体の上半身と下半身との位相差及び振幅が共に大となる近共振振動数にて振動を付与することを特徴とする人体振動装置。 A human body vibration device comprising vibration applying means for applying vibration to the lower body of the human body from the outside, and generating torsional vibration between the lower body and upper body of the human body,
The vibration applying means is provided in advance based on characteristics of a human body, and applies vibrations at a near resonance frequency at which both the phase difference and amplitude between the upper and lower body of the human body are large. .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004114943A JP2005296765A (en) | 2004-04-09 | 2004-04-09 | Human body vibration device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004114943A JP2005296765A (en) | 2004-04-09 | 2004-04-09 | Human body vibration device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005296765A true JP2005296765A (en) | 2005-10-27 |
Family
ID=35328962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004114943A Pending JP2005296765A (en) | 2004-04-09 | 2004-04-09 | Human body vibration device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005296765A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006116859A1 (en) * | 2005-05-04 | 2006-11-09 | Stryker Canadian Management Inc. | Vibrating patient support apparatus with a resonant referencing percussion device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5173159U (en) * | 1974-12-04 | 1976-06-09 | ||
| JPS60236668A (en) * | 1984-05-10 | 1985-11-25 | セノ−株式会社 | Abdominal muscle training machine |
| JPS63154174A (en) * | 1986-12-18 | 1988-06-27 | 片田 豊三 | Vertebra correcting apparatus |
| JPH0440669U (en) * | 1990-07-31 | 1992-04-07 | ||
| JP2003126188A (en) * | 2001-10-26 | 2003-05-07 | Matsushita Electric Works Ltd | Balance training device |
-
2004
- 2004-04-09 JP JP2004114943A patent/JP2005296765A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5173159U (en) * | 1974-12-04 | 1976-06-09 | ||
| JPS60236668A (en) * | 1984-05-10 | 1985-11-25 | セノ−株式会社 | Abdominal muscle training machine |
| JPS63154174A (en) * | 1986-12-18 | 1988-06-27 | 片田 豊三 | Vertebra correcting apparatus |
| JPH0440669U (en) * | 1990-07-31 | 1992-04-07 | ||
| JP2003126188A (en) * | 2001-10-26 | 2003-05-07 | Matsushita Electric Works Ltd | Balance training device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006116859A1 (en) * | 2005-05-04 | 2006-11-09 | Stryker Canadian Management Inc. | Vibrating patient support apparatus with a resonant referencing percussion device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5719630B2 (en) | Massage machine | |
| KR102173734B1 (en) | Massager | |
| JP3764471B1 (en) | Balance health machine | |
| KR101146851B1 (en) | Massage mechanism | |
| JP6424199B2 (en) | Musculoskeletal vibration system providing independent vibration and bias control | |
| KR102532928B1 (en) | Treatment unit and massage machine | |
| US20110118637A1 (en) | Percussive massager | |
| WO2018154986A1 (en) | Knee joint stimulation device | |
| TW200930347A (en) | Powered exercise equipment | |
| KR102202659B1 (en) | Massage Machine | |
| JP7647663B2 (en) | Foot-pedaling exercise system, control method, and program | |
| JP2006101982A (en) | Swinging exercise apparatus | |
| KR101758200B1 (en) | Exercising device and operating method thereof | |
| JP2008079834A (en) | Rocking equipment for body stimulation | |
| JP2007089650A (en) | Exercise assisting apparatus | |
| JP2005296765A (en) | Human body vibration device | |
| KR100864142B1 (en) | Vibration exercise equipment | |
| JP5542170B2 (en) | Lumbar exercise machine | |
| JP2002272875A (en) | Leg oscillation health appliance | |
| JPH0857080A (en) | Whole body exercise machine | |
| CN105983207B (en) | Swinging sports equipment and adjusting method thereof | |
| JP7089725B2 (en) | Massage machine | |
| JP2008272328A (en) | Standing type exercise equipment | |
| JP2007061180A (en) | Training device | |
| JP2007167625A (en) | Exercise equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091001 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100318 |
|
| A02 | Decision of refusal |
Effective date: 20100705 Free format text: JAPANESE INTERMEDIATE CODE: A02 |