JP2005295680A - 非接触給電装置及び非接触給電システム - Google Patents
非接触給電装置及び非接触給電システム Download PDFInfo
- Publication number
- JP2005295680A JP2005295680A JP2004106833A JP2004106833A JP2005295680A JP 2005295680 A JP2005295680 A JP 2005295680A JP 2004106833 A JP2004106833 A JP 2004106833A JP 2004106833 A JP2004106833 A JP 2004106833A JP 2005295680 A JP2005295680 A JP 2005295680A
- Authority
- JP
- Japan
- Prior art keywords
- power
- voltage
- circuit
- power supply
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001172 regenerating effect Effects 0.000 claims abstract description 151
- 238000007599 discharging Methods 0.000 abstract description 20
- 230000008929 regeneration Effects 0.000 description 31
- 238000011069 regeneration method Methods 0.000 description 31
- 238000009499 grossing Methods 0.000 description 20
- 239000003990 capacitor Substances 0.000 description 15
- 230000005540 biological transmission Effects 0.000 description 11
- 238000001514 detection method Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 11
- 230000000694 effects Effects 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000008054 signal transmission Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images






Landscapes
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】 回生電力を有効利用できる非接触給電装置及び非接触給電システムを提供する。
【解決手段】 充放電制御回路80は、モータM1,M2,…が回生電力を発生させた場合、充電回路81を制御して、蓄電回路83に回生電力を充電させ、放電回路82を制御して、蓄電回路83の放電を停止させる。また、回生電力が発生していない場合、充電回路81を制御して、蓄電回路83の充電を停止させる。更に、モータM1,M2,…が電力を消費している場合、放電回路82を制御して、蓄電回路83に、充電してあった回生電力を放電させる。
【選択図】 図5
【解決手段】 充放電制御回路80は、モータM1,M2,…が回生電力を発生させた場合、充電回路81を制御して、蓄電回路83に回生電力を充電させ、放電回路82を制御して、蓄電回路83の放電を停止させる。また、回生電力が発生していない場合、充電回路81を制御して、蓄電回路83の充電を停止させる。更に、モータM1,M2,…が電力を消費している場合、放電回路82を制御して、蓄電回路83に、充電してあった回生電力を放電させる。
【選択図】 図5
Description
本発明は、高周波電流が流れる給電線から物理的に非接触の状態で受電して負荷(例えばモータ)へ給電する非接触給電装置及び非接触給電システムに関する。
非接触給電システムは、高周波電流が流れる給電線と、該給電線に対して非接触の状態で受電した電力をモータへ供給する受電回路を有する非接触給電装置とを備える。
非接触給電システムは、例えば、搬送車又は昇降機等(以下、移動体という)を備える移動体システムに、駆動用の電力を供給する。この場合、非接触給電装置は移動体に設置されて、移動体が備えるモータへ給電する。このような非接触給電装置は、例えば、給電線に対して非接触の状態で誘導結合されたピックアップコイルを備え、該ピックアップコイルに誘起された電力をモータへ供給するよう構成してある(例えば、特許文献1参照)。
ところで、バッテリを備える電気自動車、又は給電線に対して物理的に接触した状態で給電される電車等においては、減速制動時に発生する回生電力を回収して、加速走行時にその電気自動車で利用したり、加速走行中の他の電車へ供給したりすることが一般に行なわれている(例えば、特許文献2,3参照)。
特開平8−264357号公報
特開平8−163706号公報
特開2001−354053号公報
特開2000−116035号公報
しかしながら、非接触給電を行なう装置又はシステム等においては、従来、回生電力の回収がなされておらず、そのような装置又はシステム等に抵抗器を備えて、該抵抗器に回生電力を供給し、供給された回生電力を熱として消費することが一般になされていた。
また、特許文献4に開示された輸送設備は、モータを駆動するためのバッテリを電動移動体に備えており、そのバッテリに対して非接触で給電を行なうよう構成されているが、該バッテリは、回生電力を回収するよう構成されたものではない。
以上のようなことから、回生電力を有効利用できる非接触給電装置及び非接触給電システムが望まれている。
本発明は斯かる問題を解決するためになされたものであり、モータの回生電力を蓄電する蓄電回路を備えることにより、回生電力を蓄電回路に回収して有効利用できる非接触給電装置、及び該非接触給電装置を備える非接触給電システムを提供することを目的とする。
本発明の他の目的は、モータの回生電力を外部の受電手段へ供給する供給手段を備えることにより、回生電力を外部で回収して有効利用できる非接触給電装置を提供することにある。
本発明の更に他の目的は、受電手段と、該受電手段へモータの回生電力を供給する供給手段を有する非接触給電装置とを備えることにより、回生電力を回収して有効利用できる非接触給電システムを提供することにある。
第1発明に係る非接触給電装置は、交流電流が流れる給電線から非接触で受電してモータへ給電する受電回路を備える非接触給電装置において、モータの回生電力を蓄電する蓄電回路を備えることを特徴とする。
第1発明にあっては、例えば、高周波電流が流れる給電線から非接触で受電する受電回路の出力部に、モータと、バッテリ又はコンデンサ等を用いてなる蓄電回路とを接続し、モータによって駆動される昇降機の下降時、又は搬送車の減速時等にモータが発生させる回生電力を蓄電回路に充電する。この場合、蓄電回路は回生電力を回収する。
回生電力を回収した蓄電回路は、昇降機の上昇時又は搬送車の加速時等に放電して、モータ及び/又はモータ以外の負荷へ給電することができる。このため、回生電力を、該非接触給電装置を備える昇降機内又は搬送車内で有効に利用することができる。
なお、蓄電回路が着脱可能に備えられている場合、回生電力を回収した蓄電回路は、装置から取り外され、他の負荷に接続されることによって、該負荷へ給電することができる。
以上のようにして、本発明の非接触給電装置は、従来、無駄に消費されていた回生電力を回収して、有効に利用することができる。
第2発明に係る非接触給電装置は、前記蓄電回路への回生電力の供給を入断する第1スイッチ回路と、前記受電回路の電圧を検出する手段、検出した電圧と所定の第1電圧とを比較する手段、及び、比較結果の高/低に応じて、前記第1スイッチ回路の入/断を制御する手段を有する第1制御回路とを備えることを特徴とする。
第2発明にあっては、第1スイッチ回路が入である場合は蓄電回路へ電流が流入し、断である場合は電流が遮断されるように構成する。また、第1電圧として、モータによる回生電力発生時の電圧を用いる。該電圧は、垂下特性を有する受電回路においては、受電回路の最大出力電圧(無負荷時の出力電圧)より高い。
第1制御回路は、受電回路の電圧を検出し、検出した電圧が第1電圧以上である場合は第1スイッチ回路を入にして蓄電回路へ電流を流入させる。即ち回生電力を蓄電回路へ供給して、蓄電回路を充電する。また、検出した電圧が第1電圧未満である場合は第1スイッチ回路を断にして蓄電回路へ電流を流入させない。即ち蓄電回路の充電を停止する。
以上のようにして、モータで発生した回生電力を蓄電回路が回収するため、回生電力を無駄に消費することが防止できる。また、回生電力の発生中にのみ蓄電回路を充電することによって、モータへ供給すべき電力を蓄電回路が回収してしまうことが防止できる。
また、蓄電回路の充電中は、受電回路の電圧が第1電圧に略等しくなるため、第1電圧を、装置を構成する各機器及びモータが使用可能である電圧の上限以下の電圧としておく場合、回生電力発生時の過電圧によって各機器又はモータが停止したり破損したりすることが防止できる。
第3発明に係る非接触給電装置は、前記蓄電回路からの放電を入断する第2スイッチ回路を備え、前記第1制御回路は、検出した電圧と前記第1電圧より低い第2電圧とを比較する手段、検出した電圧が前記第2電圧以下である場合、前記第2スイッチ回路を入にする手段、及び、検出した電圧が前記第1電圧以上である場合、前記第2スイッチ回路を断にする手段を更に有することを特徴とする。
第3発明にあっては、第2スイッチ回路が入である場合は蓄電回路から電流が流出し、断である場合は電流が遮断されるように構成する。また、第2電圧として、モータが電力を消費している場合の電圧を用いる。該電圧は、垂下特性を有する受電回路においては、受電回路の最大出力電圧(無負荷時の出力電圧)より低い。
第1制御回路は、受電回路の電圧を検出し、検出した電圧が第2電圧以下である場合は第2スイッチ回路を入にして蓄電回路から電流を流出させる。即ち蓄電回路を放電させる。
以上のようにして、蓄電回路が回収した回生電力をモータへ供給するため、回生電力を有効に利用することができる。
また、モータが電力を消費している場合、即ちモータが回生電力を発生していない場合に、蓄電回路から、回収した回生電力を放電することによって、蓄電回路は再び充電可能になるため、回生電力を繰り返し充電/放電して、効率良く回収/利用することができる。
更に第1制御回路は、検出した電圧が第1電圧以上である場合に、第1スイッチ回路を入にして蓄電回路を充電し、第2スイッチ回路を断にして蓄電回路から電流を流出させない。即ち蓄電回路からの放電を停止する。
このようにして蓄電回路の充電と放電とが同時に行なわれることを防止するため、回生電力を効率良く回収することができる。
第4発明に係る非接触給電装置は、前記第1制御回路は、検出した電圧と前記第1電圧より低く前記第2電圧より高い第3電圧とを比較する手段、及び、前記第2スイッチ回路が入にされている場合に、検出した電圧が前記第3電圧以下であるとき、前記第2スイッチ回路を断にする手段を更に有することを特徴とする。
第4発明にあっては、第3電圧として、例えば蓄電回路が放電する設定電圧より小さい電圧を用いる。受電回路の電圧が第3電圧以下になる状態とは、蓄電回路に充電されていた回生電力が減少して蓄電回路の出力電圧が第3電圧以下に低下し、モータが、受電回路から給電される電力も消費している状態である。
この状態のとき、第1制御回路が、第2スイッチ回路を断にして蓄電回路からの放電を停止するため、蓄電回路が回収した回生電力をモータが消費する場合にのみ蓄電回路から放電することができる。
第5発明に係る非接触給電装置は、交流電流が流れる給電線から非接触で受電してモータへ給電する非接触給電装置において、モータの回生電力を外部の受電手段へ供給する供給手段を備えることを特徴とする。
第5発明にあっては、例えば、高周波電流が流れる給電線から非接触で受電する受電回路の出力部に、モータと、供給手段とを接続し、モータによって駆動される昇降機の下降時、又は搬送車の減速時等にモータが発生させる回生電力を、供給手段を介して外部の受電手段へ供給する。この場合、受電手段は回生電力を回収する。
回生電力を回収した受電手段は、回収した回生電力を、非接触給電装置外部の蓄電手段、商用電源、給電線への給電用の電源、又は他の負荷等へ給電することができるため、回生電力を装置外部で有効利用することができる。
以上のようにして、本発明の非接触給電装置は、従来、無駄に消費されていた回生電力を回収して、有効に利用することができる。
第6発明に係る非接触給電装置は、前記受電手段は電線であり、前記供給手段は、前記受電手段に誘導結合すべき供給部と、該供給部への回生電力の供給を入断する第3スイッチ回路とを備えることを特徴とする。
第6発明にあっては、第3スイッチ回路が入である場合は供給手段へ電流が流入し、断である場合は電流が遮断されるように構成する。第3スイッチ回路の入断は、例えば、回生電力が発生しているか否かを検出し、この検出結果に応じて切り替える。即ち、回生電力が発生している場合は第3スイッチ回路を入にし、発生していない場合は断にする。
供給手段の供給部へは、回生電力を高周波電流に変換して流入させる。この場合、供給部と受電手段とは誘導結合して、供給部に流れる交流電流の周波数に等しい周波数を有する交流の電力が誘起される。受電手段は電線であるため、誘起された電力は、例えば受電手段に接続された蓄電手段又は電源等に回収される。
以上のようにして、モータが回生電力を発生させている場合に、発生した回生電力を、誘導起電力として外部の受電手段に回収させることができるため、回生電力を装置外部で有効に利用することができる。
第7発明に係る非接触給電装置は、交流電流が流れる給電線から非接触で受電してモータへ給電するための受電回路を備え、前記供給手段は、前記受電回路の電圧を検出する手段、及び、該手段が検出した電圧の高/低に応じて、前記第3スイッチ回路の入/断を制御する手段を有する第2制御回路を備えることを特徴とする。
第7発明にあっては、供給手段が、受電回路の出力電圧を検出し、検出した電圧と、所定の電圧とを比較する。この所定の電圧として、モータによる回生電力発生時の電圧(例えば、第2発明で用いた第1電圧)を用いる。検出した電圧が所定の電圧以上である場合、発生した回生電力を供給手段から受電手段に供給させるべく、制御手段が第3スイッチ回路を入にする。また、検出した電圧が所定の電圧未満である場合、回生電力以外の電力を供給手段から受電手段に回収させることを防止すべく、制御手段が第3スイッチ回路を断にする。
以上のようにして、回生電力の発生中にのみ供給手段へ電力を供給することによって、モータへ供給すべき電力を供給手段が回収してしまうことを防止でき、回生電力を適切に回収することができる。
また、供給手段から受電手段への電力供給中は、モータの電圧が所定の電圧に略等しくなるため、所定の電圧を、装置を構成する各機器及びモータが使用可能である電圧の上限以下の電圧としておく場合、回生電力発生時の過電圧によって各機器又はモータが停止したり破損したりすることを防止できる。
第8発明に係る非接触給電システムは、交流電流が流れる給電線と第1発明乃至第4発明の何れか一つに係る非接触給電装置とを備えることを特徴とする。
第8発明にあっては、システムに備えられた非接触給電装置が、第1発明乃至第4発明の何れか一つに係る非接触給電装置であるため、該非接触給電装置の効果を得て、従来、無駄に消費されていた回生電力を、有効に利用することができる。
第9発明に係る非接触給電システムは、商用電源から受電して交流電流を出力する電源装置と、該電源装置から出力された交流電流が流れる給電線と、該給電線から非接触で受電してモータへ給電する非接触給電装置とを備える非接触給電システムにおいて、前記非接触給電装置は第5発明乃至第7発明の何れか一つに係る非接触給電装置であり、該非接触給電装置が供給する回生電力を受電する受電手段と、該受電手段が受電した回生電力を、前記商用電源又は前記電源装置へ供給する手段とを備えることを特徴とする。
第9発明にあっては、非接触給電装置が備えている供給手段から供給された回生電力を、受電手段を介して、システム内部の電源装置、又は商用電源へ供給することができるため、従来、無駄に消費されていた回生電力を、システム内部又は外部にて、有効に利用することができる。
第10発明に係る非接触給電システムは、商用電源から受電して交流電流を出力する電源装置と、該電源装置から出力された交流電流が流れる給電線と、該給電線から非接触で受電してモータへ給電する非接触給電装置とを備える非接触給電システムにおいて、前記非接触給電装置は第5発明乃至第7発明の何れか一つに係る非接触給電装置であり、該非接触給電装置が供給する回生電力を受電する受電手段は前記給電線であり、該給電線が受電した回生電力を、前記商用電源又は前記電源装置へ供給する手段を備えることを特徴とする。
第10発明にあっては、非接触給電装置が備えている供給手段から供給された回生電力を、受電手段を介して、システム内部の電源装置、又は商用電源へ供給することができるため、従来、無駄に消費されていた回生電力を、システム内部又は外部にて、有効に利用することができる。
また、受電手段と給電線とが一体であるため、給電線とは別体の受電手段を設ける必要がなく、システムを小型化することができる。
本発明の非接触給電装置及び非接触給電システムによれば、モータが回生電力を発生させている場合に、発生した回生電力を蓄電回路に充電し、例えば、モータが回生電力を発生させていないときに、受電回路からモータへ給電するよりも優先的に、充電してある電力を蓄電回路から放電してモータへ供給することにより、従来、無駄に消費されていた回生電力を有効に利用することができる。このため、システムの消費電力を低減して、省エネルギの効果を得ることができる。
また、モータの消費電力が大きい場合に、受電回路からモータへ給電すると共に、充電してある電力を蓄電回路から放電してモータへ供給するときは、受電回路の受電容量を、モータの消費電力に応じて大きく設ける必要がない。このため、ピックアップコア及び共振回路等の各機器を小型化することができる。
また、蓄電回路を備えることによって、従来の非接触給電回路に備えられていた回生電力消費用の抵抗器を備える必要がなくなり、また、一般に、このような抵抗器よりも蓄電回路の方が小さく構成できるため、装置を小型化することができる。
更に、非接触給電装置は、モータが回生電力を発生させているか否か、又は、モータが電力を消費しているか否かを、受電回路の電圧の高低を用いて検知し、これに応じて蓄電回路を充電したり蓄電回路から放電したりする。この場合、回生電力の発生中は蓄電回路を充電して放電を停止し、電力の消費中は蓄電回路から放電して充電を停止する。このため、回生電力の電圧による過電圧でモータが停止したり装置を構成する機器が破損したりする前に、装置の電圧を減少させることができる。また、蓄電回路の充放電を効率良く行なうことができる。
また、本発明の非接触給電装置及び非接触給電システムによれば、モータが回生電力を発生させている場合に、発生した回生電力を外部の受電手段に供給することにより、従来、無駄に消費されていた回生電力を有効に利用することができるため、消費電力を低減して、省エネルギの効果を得ることができる。
また、回生電力を、非接触で受電手段に回収させるため、回生電力の回収に際し、受電手段と供給手段との移動しながらの接触によるゴミの発生を防止することができ、また、受電手段と供給手段との接触部となる導体を露出させる必要がなく、更に、非接触給電装置の移動中に、受電手段と供給手段とを接触させるために非接触給電装置を停止させる必要がない等の効果を得ることができる。
更に、非接触給電装置内部ではなく、受電手段を介して装置外部で回収し、更に、商用電源又は電源装置等に回収するため、回収した回生電力を再び非接触給電装置へ供給するのみならず、システム内部の他の非接触給電装置、あるいはシステム外部の他の負荷へ供給することが容易である等、本発明は優れた効果を奏する。
以下、本発明を、その実施の形態を示す図面に基づいて詳述する。
(実施の形態 1.)
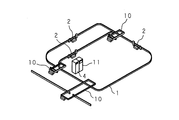
図1は、本発明の実施の形態1に係る非接触給電システムを用いた移動体システムの構成を示す斜視図である。
図1は、本発明の実施の形態1に係る非接触給電システムを用いた移動体システムの構成を示す斜視図である。
図中1は、モノレール方式の移動体システムを構成するレールである。レール1は、工場又は倉庫等の天井に敷設されており、レール1に、システムコントローラ11によって駆動制御される複数の移動体2,2,…が夫々懸架されている。また、レール1は、図示しない複数のステーションを結んで、多重のループ状に設けられており、このため、交差部を有する。
交差部には、スイッチレール方式の分岐・合流部10,10,…が設けられており、分岐・合流部10,10,…は、移動体2,2,…の目的地に応じて、レール1を切り替えるよう構成してある。
各移動体2は、非接触給電システムを介して駆動用の電力を得る。非接触給電システムは、AC200V、60Hzの商用電源から受電して、10KHzの定電流(振幅一定又は実効電流一定の交流電流)を出力する高周波電源装置4(電源装置)を備える。
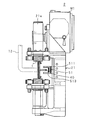
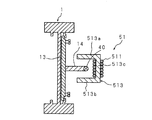
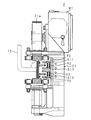
図2及び図3は、移動体システムに備えられた移動体2の構成を示す側面図及び正面図であり、図4は、非接触給電システムが備える給電線40及びピックアップコイル511を示す断面図である。
レール1はI字型の断面形状を有し、その一側面には、支持腕12,12,…が、レール1の長手方向に適宜の間隔で設けられている。支持腕12,12,…によって、レール1は天井から略水平に吊り下げられている。
レール1の他側面には、取付板13がネジ留めされており、取付板13の上下方向中央部に、多数の棒状部材を用いてなる支持部材14,14,…が、略水平に並んで設けられている。
給電線40は、支持部材14,14,…の先端部に固定されることによって、レール1に沿って敷設されている。また、給電線40は、高周波電源装置4に接続されており(図5参照)、高周波電源装置4によって10KHzの交流定電流を供給されている。
各移動体2は、正面視がコの字状である前後一対の車体枠21,22を備え、車体枠21,22の上部に、前輪21a及び後輪22aを夫々回動可能に備える。前輪21a及び後輪22aをレール1に転接させることによって、移動体2は、レール1に懸架される。また、車体枠21は、前輪21a近傍に、前輪21aに連繋する走行用のモータM1を固定してある。また、移動体2は、被搬送物を着脱可能に取り付けることができるキャリア23を備え、キャリア23は、車体枠21,22夫々の下部にわたして設けられ、昇降用のモータM2(図5参照)によって昇降自在に駆動されるよう車体枠21,22によってレール1の下側に吊り下げられている。移動体2は、システムコントローラ11に制御されて、キャリア23にて一のステーション上の被搬送物を持ち上げ、白抜矢符方向へ走行し、その被搬送物を他のステーション上へ下ろす。
移動体2は、ピックアップコイル511及びピックアップコア513を備える非接触給電装置51を搭載してあり、非接触給電装置51にモータM1,M2,…を接続して、非接触給電装置51を介し、給電線40から駆動用の電力を得るよう構成されている。
ピックアップコア513は、ピックアップコイル511を巻装してあり、車体枠21のレール1側に固定されている。ピックアップコア513は、断面形状がコの字状に形成された磁性体であり、ピックアップコイル511を巻回してある柱部513cと、柱部513cの両端に夫々設けられた突起部513a,513bとを有する。
レール1に移動体2を載架する場合は、ピックアップコア513が、給電線40と所定の間隔を隔てて対面し、給電線40が突起部513a,513bの間に位置するよう配置する。
高周波電源装置4によって給電線40に高周波交流電流が通電された場合、給電線40の周囲に、時間的に変化する磁束が形成される。非接触給電装置51は、その磁束がピックアップコイル511に鎖交することによってピックアップコイル511に発生した誘導起電力を受電し、モータM1,M2,…へ供給するよう構成してある。
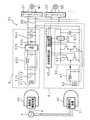
図5は、非接触給電システムが備える非接触給電装置51の構成を示す電気回路図である。
図中9は商用電源であり、商用電源9に接続された高周波電源装置4は、商用電源9の出力を整流し、平滑化して直流とし、該直流をインバータ(DC−AC変換器)に入力して高周波交流電流に変換して、変換した高周波電流を給電線40へ定電流として出力する。
各移動体2に搭載してある非接触給電装置51は、受電回路5と蓄電部8とを備える。また、受電回路5の出力部に、DCバスDBを介してモータドライバD1,D2,…が接続してあり、モータドライバD1,D2,…は、負荷としてのモータM1,M2,…を駆動する。モータM1,M2,…は交流モータであり、モータドライバD1,D2,…を介して、受電回路5の出力部に接続してある。
受電回路5は共振回路部510を備え、共振回路部510は、ピックアップコイル511と、ピックアップコイル511に並列に接続された共振コンデンサ512とを備える。共振回路部510は、給電線40に誘導結合すべく、給電線40に対し離隔配置されているピックアップコイル511のインダクタンスと、共振コンデンサ512のキャパシタンスとが、給電線40を流れる高周波交流電流の周波数と共振状態になるよう構成されている。即ち、共振回路部510は、ピックアップコイル511に誘起された電力を受けて、高周波交流の定電流源として機能する。
受電回路5は、共振回路部510の他に、共振回路部510の出力である交流定電流を定電圧(振幅一定又は実効電圧一定の交流電圧)に変換するイミタンス変換回路520と、イミタンス変換回路520の出力である交流定電圧を全波整流するダイオードブリッジを用いた整流回路530と、平滑コンデンサを用いてなり、整流回路530が出力した全波整流波形を平滑化する平滑回路540とを備える。また、受電回路5は、整流回路530と平滑回路540との間に、高周波電源装置4及びモータM1,M2,…が停止している場合にコンデンサ540に蓄電されている電荷を放電するための抵抗器550を備える。
なお、整流回路530を、全波整流するダイオードブリッジの代わりに半波整流するダイオードを用いて構成しても良い。また、抵抗器550は、平滑回路540と受電回路5の出力部との間に備えられていても良い。
受電回路5は、共振回路部510の出力(定電流)を、イミタンス変換回路520で定電圧に変換し、整流回路530で全波整流し、平滑回路540で平滑することによって、直流電流をモータドライバD1,D2,…へ供給する。
モータドライバD1,D2,…はインバータ機能を有するよう構成してあり、供給された直流電流を交流電流に変換して、モータM1,M2,…へ供給する。モータM1,M2,…は、交流電流を受けて回転する。また、モータM1,M2,…は、回生電力を発生する場合、発電機として機能して交流電流を出力する。モータM1,M2,…から交流電流が出力された場合、モータドライバD1,D2,…は、その交流電流を直流電流に変換して出力する。
受電回路5は垂下特性を有するため、その出力電圧は、無負荷時(モータM1,M2,…が停止しているとき)の電圧Vs が最大電圧であり、前記出力電圧は、モータM1,M2,…が駆動を開始することによって低下する。このため、回生電力が発生していない場合、受電回路5の出力部の電圧VはV≦Vsである。一方、回生電力が発生した場合、受電回路5の出力部の電圧VはV>Vs となる。このため、モータドライバD1,D2,…が出力した直流電流は、非接触給電装置51の蓄電部8へ流入する。
蓄電部8は、充放電制御回路80と、バッテリを用いてなる蓄電回路83とを備え、蓄電回路83は、充電回路81及び放電回路82を夫々介して、DCバスDBに接続されている。また、充放電制御回路80も、DCバスDBに接続されている。
充放電制御回路80(第1制御回路)は、受電回路5の出力部の電圧Vを検出する検出部80aを備え、検出した電圧Vが第1電圧V1 以上である場合、充電回路81へ制御信号を伝送し、かつ、放電回路82への制御信号の伝送を停止する。また、検出した電圧Vが第1電圧V1未満である場合、充電回路81への制御信号の伝送を停止する。また、検出した電圧Vが第2電圧V2 以下である場合、放電回路82への制御信号の伝送を行ない、放電回路82への制御信号の伝送中に検出した電圧Vが第3電圧V3以下であるとき、放電回路82への制御信号の伝送を停止する。
第1電圧V1 、第2電圧V2 、及び第3電圧V3 は、予め定められて充放電制御回路80に設定される(後述)。
充電回路81(第1スイッチ回路)は、制御信号が伝送された場合に、受電回路5及びモータドライバD1,D2,…側から流入する電流を通電し(即ち充電回路81が入になり)、制御信号が伝送されない場合に、電流を遮断する(即ち充電回路81が断になる)よう構成してある。
放電回路82(第2スイッチ回路)は、制御信号が伝送された場合に、蓄電回路83側から流入する電流を通電して(即ち放電回路82が入になり)、受電回路5の最大出力電圧(無負荷時の電圧)である電圧Vs より高い電圧Vd の定電圧として出力し、制御信号が伝送されない場合に、電流を遮断する(即ち放電回路82が断になる)よう構成してある。
充放電制御回路80に設定される第1電圧V1 としては、電圧Vs 及び電圧Vdより大きく、非接触給電装置51の各機器、モータドライバD1,D2,…、及びモータM1,M2,…が使用可能である電圧の上限以下の電圧を用いる。第2電圧V2としては、受電回路5の最大出力電圧Vs より僅かに低い電圧を用いる。第3電圧V3 としては、放電回路82の出力電圧Vdより低く第2電圧V2 より高い電圧を用いる。
なお、蓄電回路83は、バッテリではなく、スーパーコンデンサ(電気二重層コンデンサ)、又は大容量のコンデンサ等を用いて構成しても良い。また、放電回路82の出力電圧Vd は、受電回路5の最大出力電圧Vs 以下の電圧であっても良い。更にまた、蓄電回路83の放電が進むとバッテリ電圧が低下し、放電回路82の出力電圧Vdが低下するため、第3電圧V3 として、第2電圧V2 より低い電圧を用いても良い。
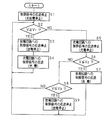
図6は、非接触給電装置51の蓄電回路83を充放電させる充放電制御回路80の動作を示すフローチャートである。
充放電制御回路80は、まず、充電回路81及び放電回路82への制御信号の伝送を停止する(S1)。即ち、移動体2の駆動開始前は、制御信号を伝送しない。このため、蓄電回路83の充放電は停止している。
移動体2の駆動開始後、充放電制御回路80は、検出した電圧Vが、第1電圧V1 以上であるか否かを判定する(S2)。V≧V1 である場合(S2でYES)、充放電制御回路80は、放電回路82への制御信号の伝送を停止し(S3)、かつ、充電回路81へ制御信号を伝送する(S4)。即ち、S3にて蓄電回路83の放電が停止し、S4にて蓄電回路83が充電される。
次いで、充放電制御回路80は、充電回路81へ制御信号を伝送しつつ、また、放電回路82へ制御信号を伝送しないまま、再びS2の動作を行なう。
充放電制御回路80は、S2にて、検出した電圧Vが第1電圧V1 以上であるか否かを判定し、V<V1 である場合(S2でNO)、充電回路81への制御信号の伝送を停止する(S5)。即ち、蓄電回路83の充電が停止する。
次いで、充放電制御回路80は、検出した電圧Vが、第2電圧V2 以下であるか否かを判定する(S6)。V≦V2 である場合(S6でYES)、充放電制御回路80は、放電回路82へ制御信号を伝送する(S7)。即ち、蓄電回路83が放電する。
次いで、充放電制御回路80は、放電回路82へ制御信号を伝送しつつ、また、充電回路81へ制御信号を伝送しないまま、再びS2の動作を行なう。
充放電制御回路80は、S6にて、検出した電圧Vが第2電圧V2 以下であるか否かを判定し、V>V2 である場合(S6でNO)、検出した電圧Vが第3電圧V3以下であるか否かを判定する(S8)。V>V3 である場合(S8でNO)、充放電制御回路80は、放電回路82へ制御信号を伝送中であるときは、その伝送を継続しつつ、また、充電回路81へ制御信号を伝送しないまま、再びS2の動作を行ない、放電回路82へ制御信号を伝送中でないときは、充電回路81及び放電回路82へ制御信号を伝送しないまま、再びS2の動作を行なう。
充放電制御回路80は、S8にて、検出した電圧Vが第3電圧V3 以下であるか否かを判定し、V≦V3 である場合(S8でYES)、放電回路82への制御信号の伝送を停止する(S9)。即ち、蓄電回路83の放電が停止する。
次いで、充放電制御回路80は、充電回路81及び放電回路82へ制御信号を伝送しないまま、再びS2の動作を行なう。
以上のようにして、充放電制御回路80は、検出部80aにて受電回路5の電圧Vを検出し、S2にて、検出した電圧Vと第1電圧V1 とを比較し、比較結果の高低に応じて、S4,S5にて、充電回路81の入/断を制御する。
また、充放電制御回路80は、検出部80aにて受電回路5の電圧Vを検出し、S6にて、検出した電圧Vと第2電圧V2 とを比較し、電圧Vが第2電圧V2 以下である場合、S7にて、放電回路82を入にし、電圧Vが第1電圧V1以上である場合、S3にて、放電回路82を断にする。
更に、充放電制御回路80は、検出部80aにて受電回路5の電圧Vを検出し、S7にて放電回路82を入にし、次いで、S8にて、検出した電圧Vと第3電圧V3 とを比較し、電圧Vが第3電圧V3 以下である場合、S9にて、放電回路82を断にする。
図7は、非接触給電装置51の受電回路5の電圧を示す特性図である。図中の縦軸は、充放電制御回路80が検出する受電回路5の出力部の電圧Vを示し、横軸は、経過時間tを示す。以下では、移動体2が、モータM1を停止させ、モータM2によってキャリア23を昇降させている場合を例示する。この場合、蓄電回路83は、モータM2の駆動開始前は、全く充電されていないものとする。
移動体2がキャリア23を昇降させていない場合(図中T1)、モータM2は停止しており、電圧V=Vs (無負荷時の電圧、即ち受電回路5の最大電圧)であるが、キャリア23の上昇を開始させ、モータM2を加速駆動させている場合(T2)、電圧V<Vsである。この場合、電圧V≦V2 となったときに放電回路82が入にされるが、蓄電回路83に充電されていないため、放電は起こらない。次いで、モータM2が一定速度で駆動され(T3)、更に減速駆動され(T4)、停止する(T5)。
次いで、移動体2が、キャリア23を下降させている場合(T6)、モータM2が回生電力を発生し、電圧V≧Vs となる。このとき、モータM2が発生させた回生電力は、受電回路5の平滑回路540に充電される。次いで、電圧V≧V1となった場合、充電回路81が入にされ、蓄電回路83が充電される。この後、蓄電回路83の充電中は、キャリア23を一定速度で下降させている場合であっても(T7)、減速しながら下降させている場合であっても(T8)、V<V1にならない限りは、V≒V1 で略一定になる。移動体2が、キャリア23を減速しながら下降させ続け、電圧V<V1 となった場合(T9)、充電回路81が断にされ、蓄電回路83の充電が停止する。このとき、モータM2が発生させた回生電力は、受電回路5の平滑回路540に充電される。
次いで、モータM2が停止し、電圧V=Vs となる(T10)。
移動体2が、キャリア23の上昇を再び開始させ、モータM2を加速駆動させている場合(T11〜T14)、電圧V<Vs となり(T11)、電圧V≦V2 となったときに、放電回路82が入にされ、蓄電回路83が放電される(T12)。この場合、蓄電回路83の放電中は、電圧V≒Vdで略一定となり、蓄電回路83に充電されていた電力が減少した場合に電圧V<Vd となり(T13)、電圧V≦V3 となったときに、放電回路82が断にされ、蓄電回路83の放電が停止して、電圧V<Vsとなる(T14)。
次いで、モータM2が一定速度で駆動され(T15)、更に減速駆動され(T16)、停止して、電圧V=Vs となる(T17)。
以上のような非接触給電装置51は、蓄電回路83に対して回生電力を繰り返し充放電することによって、回生電力を回収し、移動体2内で有効に利用することができる。また、回生電力の発生中にのみ蓄電回路83を充電することによって、モータM1,M2,…へ供給すべき電力を蓄電回路83が回収してしまうことを防止できる。更に、回生電力を蓄電回路83へ供給することによって受電回路5の出力部の電圧Vを第1電圧V1 以下に保ち、受電回路5及びモータM1,M2,…等が過電圧によって停止したり破損したりすることを防止できる。
また、非接触給電装置51は、受電回路5を制御することなく、回生電力を回収/有効利用することができる。
なお、受電回路5の出力部の電圧Vを直接的に検出するだけでなく、出力部の電圧Vに対応する電圧又は電流を検出することによって間接的に検出する構成であっても良い。
また、蓄電回路83の電圧又は電流も検出し、該電圧又は電流の大小に応じて充放電を開始/停止させるよう構成しても良い。この場合、蓄電回路の過充電及び過放電を防止することができる。
また、受電回路5の出力部の電圧Vが第1電圧V1 以上である場合にのみ蓄電回路83の放電を停止するよう構成しても良い。
また、受電回路5の代わりに、安定化された(垂下特性を有しない)受電回路を用いて非接触給電装置を構成しても良い。この場合、受電回路の電圧Vの大小ではなく、受電回路の電流の向きに応じて充放電を制御する。
更に、充放電制御回路80は、第1電圧V1 及び第2電圧V2 等を発生させる基準電圧発生回路、並びに、該基準電圧発生回路が発生させた電圧と受電回路5の出力部の電圧Vとの大小を比較し、比較結果に応じて所定の信号を出力する比較回路等を用いてアナログ回路として構成しても良い。即ち、基準電圧発生回路及び比較回路等を用いて検出部80aを構成し、この検出部80aで受電回路の電圧Vを検出し、検出した電圧Vと所定の電圧とを比較し、比較結果の高/低に応じて、各スイッチ回路の入/断を制御するよう構成する。
又は、充放電制御回路80は、受電回路5の出力部の電圧Vを検出する電圧センサ、第1電圧V1 及び第2電圧V2 等を記憶するメモリ、並びに、電圧センサである検出部80aの検出結果とメモリに記憶された電圧とを比較し、比較結果に応じて所定の信号を出力するCPU等を用いてデジタル回路として構成しても良い。即ち、検出部80a、メモリ、及びCPU等を用いて、受電回路の電圧Vを検出し、検出した電圧Vと所定の電圧とを比較し、比較結果の高/低に応じて、各スイッチ回路の入/断を制御するよう構成する。
(実施の形態 2.)
以下では、移動体システム(図1参照)に駆動用の電力を供給し、また、回生電力を回収して商用電源へ供給する非接触給電システム、及び該非接触給電システムを構成し、モータが発生させた回生電力を受電手段へに供給する非接触給電装置52を例示する。また、本実施の形態では、非接触給電装置52から供給された回生電力を受電する受電手段として、給電線40とは異なる電線(受電線70)を用いる場合を例示する。
以下では、移動体システム(図1参照)に駆動用の電力を供給し、また、回生電力を回収して商用電源へ供給する非接触給電システム、及び該非接触給電システムを構成し、モータが発生させた回生電力を受電手段へに供給する非接触給電装置52を例示する。また、本実施の形態では、非接触給電装置52から供給された回生電力を受電する受電手段として、給電線40とは異なる電線(受電線70)を用いる場合を例示する。
また、実施の形態1に対応する部分には同一符号を付してそれらの説明を省略する。
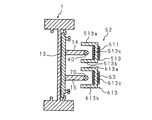
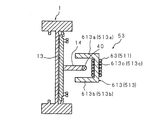
図8及び図9は、本発明の実施の形態2に係る非接触給電システムを用いた移動体システムに備えられた移動体2の構成を示す側面図及び正面図であり、図10は、非接触給電システムが備える給電線40、受電線70、及びピックアップコイル511及び供給コイル63を示す断面図である。
レール1の側面にネジ留めされている取付板13の上部及び下部には、多数の棒状部材を用いてなる支持部材14,14,…及び支持部材15,15,…が、夫々略水平に並んで設けられている。
給電線40は、支持部材14,14,…の先端部に固定されることによって、レール1に沿って敷設されており、高周波電源装置4に接続されて(図11参照)、定電流を供給されている。また、受電線70は、支持部材15,15,…の先端部に固定されることによって、給電線40に並行に敷設されており、電源回生装置71に接続されている(図11参照)。
移動体2は、ピックアップコイル511、ピックアップコア513、供給コイル63及び供給コア613を備える非接触給電装置52を搭載してあり、非接触給電装置52にモータM1,M2,…を接続して(図11参照)、非接触給電装置52を介し、給電線40から駆動用の電力を得るよう構成されている。また、移動体2は、非接触給電装置52を介して、モータM1,M2,…が発生させた回生電力を受電線70に供給するよう構成されている。
受電線70に供給された回生電力は、電源回生装置71へ供給される。
ピックアップコア513及び供給コア613は、ピックアップコイル511及び供給コイル63を巻装してあり、車体枠21のレール1側に、上下に並設して固定されている。
供給コア613は、断面形状がコの字状に形成された磁性体であり、供給コイル63を巻回してある柱部613cと、柱部613cの両端に夫々設けられた突起部613a,613bとを有する。
レール1に移動体2を載架する場合は、ピックアップコア513及び供給コア613が、給電線40,受電線70と所定の間隔を隔てて対面し、給電線40が突起部513a,513bの間に位置し、受電線70が突起部613a,613bの間に位置するよう配置する。
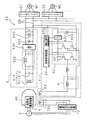
図11は、非接触給電システムが備える非接触給電装置52の構成を示す電気回路図である。
図中9は商用電源であり、商用電源9の出力を高周波電源装置4が整流し、平滑化し、10KHzの周波数を有する定電流に変換して、変換した交流定電流を給電線40へ出力する。
各移動体2に搭載してある非接触給電装置52は、受電回路5と給電回路6とを備える。
給電回路6(供給手段)は、供給制御回路60と、共振回路部61と、高周波インバータ62と、供給コイル63とを備え、供給制御回路60と高周波インバータ62とは、DCバスDBに接続されている。
供給コイル63(供給部)は、受電線70に対し離隔配置されている。共振回路部61は、高周波インバータ62と供給コイル63とに接続されており、高周波インバータ62から共振回路部61へ交流電流が流入した場合、供給コイル63を介して、受電線70にその交流電流の周波数に等しい周波数を有する交流の電力が誘起されるよう構成してある。
高周波インバータ62は、高周波インバータ62に入力される直流を平滑化する平滑コンデンサ623と、複数のトランジスタを用いてなるインバータ部621(第3スイッチ回路)とを備え、該インバータ部621の出力側が共振回路部61に接続されている。
供給制御回路60(第2制御回路)は、受電回路5の出力部の電圧Vを検出する検出部60aを備え、検出した電圧Vが第1電圧V1 以上である場合、高周波インバータ62のインバータ部621へ制御信号を伝送し、検出した電圧Vが第1電圧V1未満である場合、インバータ部621への制御信号の伝送を停止する。
供給制御回路60及び高周波インバータ62は、高周波インバータ62に直流の回生電力が供給された場合に供給された回生電力を交流に変換する手段である。
また、供給制御回路60は、高周波インバータ62内の電流を検出する電流センサ(CT)622の検出結果に応じて、高周波インバータ62から共振回路部61へ流出させる交流電流の大小を制御する。これによって、受電線70への供給量を制御する。本実施の形態では、検出した電圧Vが第1電圧V1 以上である場合、所定の電流値I1 を越える電流を検出したときに、インバータ部621への制御信号の伝送を停止する場合を例示する。
以上のような第1電圧V1 としては、受電回路の最大出力電圧Vs より大きく、非接触給電装置52の各機器、モータドライバD1,D2,…、及びモータM1,M2,…が使用可能である電圧の上限以下の電圧を用い、該第1電圧V1が、予め供給制御回路60に設定される。
高周波インバータ62は、制御信号が伝送された場合、受電回路5の出力部及びモータドライバD1,D2,…側から流入してきた直流電流を交流電流(例えば20KHzの高周波電流)に変換して共振回路部61へ流出させ(即ち供給制御回路60によって高周波インバータ62が入にされ)、制御信号を伝送されていない場合はその直流電流を遮断する(高周波インバータ62が断にされる)。
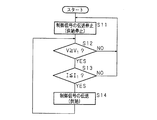
図12は、非接触給電装置52の供給制御回路60の動作を示すフローチャートである。
供給制御回路60は、まず、高周波インバータ62のインバータ部621への制御信号の伝送を停止する(S11)。即ち、移動体2の駆動開始前は、制御信号を伝送しない。このため、供給コイル63に交流が供給されず、このため、誘導結合が生じず、この結果、受電線70へも回生電力が供給されない。
移動体2の駆動開始後、供給制御回路60は、検出した電圧Vが、第1電圧V1 以上であるか否かを判定する(S12)。V≧V1 である場合(S12でYES)、供給制御回路60は、検出した電流Iが、所定の電流値I1以下であるか否かを判定する(S13)。I≦I1 である場合(S13でYES)、供給制御回路60は、インバータ部621へ制御信号を伝送する(S14)。このため、供給コイル63に交流が供給されて誘導結合が生じ、この結果、受電線70へ回生電力が供給される。
S14の処理の完了後、供給制御回路60は、処理をS12へ戻す。
供給制御回路60は、V<V1 である場合(S12でNO)、又は、I>I1 である場合(S13でNO)、処理をS11へ戻して、制御信号を伝送しているときは制御信号の伝送を停止し、制御信号を伝送していないときは、制御信号の伝送を行なわず、S12の処理を行なう。
以上のようにして、供給制御回路60は、検出部60aにて受電回路5の電圧Vを検出し、S12にて、検出した電圧Vと第1電圧V1 とを比較し、比較結果の高低に応じて、S14,S11にて、高周波インバータ62(インバータ部621)の入/断を制御する。
以上のような非接触給電装置52は、受電回路5の出力部の電圧Vが第1電圧V1 以上である場合、即ちモータM1,M2,…が回生電力を発生させ、モータドライバD1,D2,…が直流電流を出力している場合、供給制御回路60が高周波インバータ62を入にする。このとき、高周波インバータ62がモータドライバD1,D2,…から出力された直流電流を高周波の交流電流に変換して、変換した交流電流を共振回路部61へ出力し、共振回路部61へ出力された交流電流が、供給コイル63を介して受電線70に誘導起電力を発生させる。このようにして、回生電力が、交流電力として受電線70に供給される。即ち、受電線70が回生電力を受電する。
また、受電回路5の出力部の電圧Vが第1電圧V1 未満である場合、即ちモータM1,M2,…が回生電力を発生させていない場合、供給制御回路60が高周波インバータ62を断にする。このとき、高周波インバータ62が、受電回路5の出力部から出力された直流電流を遮断する。このため、回生電力が、受電線70に供給されない。
受電線70は電源回生装置71に接続され、電源回生装置71が、商用電源9に接続されている。
受電線70は、誘起された交流電流を、電源回生装置71へ伝送する。電源回生装置71は、図示しない電流センサ又は電圧センサが電流又は電圧を検出することによって、交流電流が伝送されてきたことを検出し、伝送された交流電流を、商用電源9へ給電するよう構成してある。即ち、受電線70は、受電した回生電力を電源回生装置71へ伝送し、電源回生装置71は、伝送された回生電力を、商用電源9へ給電する。このため、商用電源9に回生電力を回収させることができ、商用電源9を介して、回生電力を有効利用することができる。
以上のようにして、本実施の形態の非接触給電システムは、非接触給電装置52から商用電源9へ供給される回生電力の分だけ、省電力の効果を得ることができる(例えば、外部から買い入れる電力のコストを低減することができる)。
なお、本実施の形態の非接触給電システムにおいては、モータM1,M2,…へ給電すべき電力は、モータM1,M2,…が回生電力を発生させていない場合であっても、商用電源9から必要なだけ供給されるため、非接触給電装置52から商用電源9へ供給される回生電力の供給量は、安定的である必要はない。
また、本実施の形態においては、高周波インバータ62が、モータM1,M2,…側から受電した直流電流を、給電線40を流れる交流定電流の周波数(10KHz)とは異なる周波数(20KHz)の交流電流に変換する場合を例示したが、前記直流電流を、給電用交流電流の周波数に等しい周波数(10KHz)の交流電流に変換しても良い。
更に、供給制御回路60は、第1電圧V1 を発生させる基準電圧発生回路、及び、該基準電圧発生回路が発生させた電圧と受電回路5の出力部の電圧Vとの大小を比較し、比較結果に応じて所定の信号を出力する比較回路等で構成された検出部60aを用いてアナログ回路として構成しても良い。又は、受電回路5の出力部の電圧Vを検出する電圧センサである検出部60a、第1電圧V1を記憶するメモリ、及び、電圧センサの検出結果とメモリに記憶された電圧とを比較し、比較結果に応じて所定の信号を出力するCPU等を用いてデジタル回路として構成しても良い。
(実施の形態 3.)
以下では、移動体システム(図1参照)に駆動用の電力を供給し、また、回生電力を回収して商用電源へ供給する非接触給電システム、及び該非接触給電システムを構成し、モータが発生させた回生電力を受電手段に供給する非接触給電装置53を例示する。また、本実施の形態では、非接触給電装置53から供給された回生電力を受電する受電手段として、給電線40を用いる場合を例示する。
以下では、移動体システム(図1参照)に駆動用の電力を供給し、また、回生電力を回収して商用電源へ供給する非接触給電システム、及び該非接触給電システムを構成し、モータが発生させた回生電力を受電手段に供給する非接触給電装置53を例示する。また、本実施の形態では、非接触給電装置53から供給された回生電力を受電する受電手段として、給電線40を用いる場合を例示する。
また、実施の形態1又は2に対応する部分には同一符号を付してそれらの説明を省略する。
図13は、本発明の実施の形態3に係る非接触給電システムを用いた移動体システムに備えられた移動体2の構成を示す側面図であり、図14は、非接触給電システムが備える給電線40及び供給コイル63を示す断面図である。
給電線40は、支持部材14,14,…の先端部に固定されることによって、レール1に沿って敷設されており、高周波電源装置4に接続されて(図15参照)、交流定電流が供給されている。
移動体2は、ピックアップコイル511、ピックアップコア513、供給コイル63、及び供給コア613を備える非接触給電装置53を搭載してあり、非接触給電装置53にモータM1,M2,…を接続して(図15参照)、非接触給電装置53を介し、給電線40から駆動用の電力を得るよう構成されている。また、移動体2は、非接触給電装置53を介して、モータM1,M2,…が発生させた回生電力を給電線40に供給するよう構成されている。
ピックアップコア513及び供給コア613は、ピックアップコイル511及び供給コイル63を巻装してあり、車体枠21のレール1側に、前後に並設して固定されている。
レール1に移動体2を載架する場合は、供給コア613(ピックアップコア513)が、給電線40と所定の間隔を隔てて対面し、給電線40が突起部613a,613b(突起部513a,513b)の間に位置するよう配置する。
図15は、非接触給電システムが備える非接触給電装置53の構成を示す電気回路図である。
図中9は商用電源であり、商用電源9の出力を高周波電源装置4が整流し、平滑化し、10KHzの周波数を有する定電流に変換して、変換した定電流を給電線40へ出力する。
各移動体2に搭載してある非接触給電装置53は、受電回路5と給電回路6とを備える。
供給コイル63は、給電線40に対し離隔配置されている。共振回路部61は、高周波インバータ62と供給コイル63とに接続されており、高周波インバータ62から共振回路部61へ交流電流が流入した場合、供給コイル63を介して、その交流電流の周波数(20KHz)に等しい周波数を有する交流の電力が給電線40に誘起されるよう構成してある。
以上のような非接触給電装置53は、受電回路5の出力部の電圧Vが第1電圧V1 以上である場合、即ちモータM1,M2,…が回生電力を発生させ、モータドライバD1,D2,…が直流電流を出力している場合、供給制御回路60が高周波インバータ62を入にする。このとき、高周波インバータ62がモータドライバD1,D2,…から出力された直流電流を高周波の交流電流に変換して、変換した交流電流を共振回路部61へ出力し、共振回路部61へ出力された交流電流が、供給コイル63を介して給電線40に誘導起電力を発生させる。このようにして、回生電力が、交流電力として給電線40に供給される。即ち、給電線40が回生電力を受電する。
給電線40には、高周波電源装置4から供給される10KHzの定電流が流れており、また、共振回路部61が給電線40に回生電力を供給した場合に、20KHzの交流電流(以下、回生交流電流と言う)が流れる。
電源回生装置72は、給電線40を流れる回生交流電流の周波数(20KHz)と共振状態になるよう構成されている共振回路部720を備え、更に、商用電源9に接続してある。また、電源回生装置72は、共振回路部720に誘起された電力を受けて、共振回路部720に定電流が発生した場合、即ち回生電力を給電線40から受電した場合、受電した回生電力を、商用電源9へ給電するよう構成してある。即ち、給電線40は、受電した回生電力を伝送し、電源回生装置72は、共振回路部720を介して回生電力を受電し、受電した回生電力を、商用電源9へ給電する。このため、商用電源9に回生電力を回収させることができ、商用電源9を介して、回生電力を有効利用することができる。
なお、高周波電源装置4から給電線40へ供給される定電流の周波数と、回生交流電流の周波数とが等しい場合、給電回路6と電源回生装置72とを同期させる必要があるため、各周波数は、夫々異なることが望ましい。
(実施の形態 4.)
以下では、移動体システム(図1参照)に駆動用の電力を供給し、また、回生電力を回収して高周波電源装置へ供給する非接触給電システム、及び該非接触給電システムを構成し、モータが発生させた回生電力を受電手段に供給する非接触給電装置52を例示する。また、本実施の形態では、非接触給電装置52から供給された回生電力を受電する受電手段として、受電線70を用いる場合を例示する。
以下では、移動体システム(図1参照)に駆動用の電力を供給し、また、回生電力を回収して高周波電源装置へ供給する非接触給電システム、及び該非接触給電システムを構成し、モータが発生させた回生電力を受電手段に供給する非接触給電装置52を例示する。また、本実施の形態では、非接触給電装置52から供給された回生電力を受電する受電手段として、受電線70を用いる場合を例示する。
また、実施の形態1又は2に対応する部分には同一符号を付してそれらの説明を省略する。
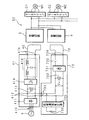
図16は、本発明の実施の形態4に係る非接触給電システムが備える高周波電源装置41及び電源回生装置73の構成を示す電気回路図である。
図中41は高周波電源装置であり、高周波電源装置41は、交流電力を受電する交流入力部410と、ダイオードブリッジを用いてなる整流回路411と、平滑コンデンサを用いてなる平滑回路413とを備える。また、整流回路411と平滑回路413との間に、直流電力を受電する直流入力部412を備える。
更に、高周波電源装置41は、トランジスタを用いてなるインバータ部414と、インダクタ及びキャパシタを適宜配置してなるイミタンス変換部415と、交流電流を給電する交流出力部416とを備える。高周波電源装置41は、交流入力部410に商用電源9が接続されており、直流入力部412に電源回生装置73が接続されており、交流出力部416に給電線40が接続されている。
電源回生装置73は、交流電力を受電する交流入力部734と、ダイオードブリッジを用いてなる整流回路731と、平滑コンデンサを用いてなる平滑回路732と、外部へ直流電力を給電する直流出力部733とを備える。更に、高周波電源装置41は、交流入力部734と整流回路731との間に、急激な電圧の変化を緩和するためのコンデンサ730を備える。電源回生装置73は、交流入力部734に受電線70が接続されており、直流出力部733に高周波電源装置41が接続されている。
以上のような非接触給電システムは、受電線70が、非接触給電装置52が供給した回生電力を交流電力として受電し、受電した回生電力を電源回生装置73の交流入力部734へ伝送する。
電源回生装置73は、交流入力部734へ入力された回生電力を、整流回路731で全波整流し、整流回路731が出力した全波整流波形を有する直流電流を平滑回路732で平滑し、直流出力部733から、高周波電源装置41の直流入力部412へ入力する。
高周波電源装置41は、商用電源9から交流入力部410へ入力された交流電力を整流回路411で全波整流し、整流回路411が出力した全波整流波形を有する直流電流、又は、該直流電流と、電源回生装置73から直流入力部412へ入力された直流電流とを平滑回路413で平滑し、平滑回路413の出力をインバータ部414で交流電流に変換し、インバータ部414が出力した交流電流をイミタンス変換部415で定電流に変換して、交流出力部416から給電線40へ給電する。即ち、電源回生装置73は、受電線70が受電した回生電力を、高周波電源装置41へ供給する。
以上のようにして、高周波電源装置41に回生電力を回収させることができ、システム内部で回生電力を有効利用することができる。
この場合、電源回生装置73は、平滑回路732の出力である直流電流を、直接、高周波電源装置41へ入力することができる。このため、その直流電流を、一旦交流電流に変換して商用電源9へ供給し、商用電源9から、交流電流として高周波電源装置41へ入力する必要がなく、電源回生装置73の回路を簡易に構成することができる。
更に、電源回生装置73は、直流出力部733と平滑回路732との間に、供給量制御回路735を介して、抵抗器736を備える。供給量制御回路735は、平滑回路732の電圧Vo 、即ち、直流出力部733から出力される直流の電圧Voを検出し、検出結果が所定の電圧以上である場合は、平滑回路732から出力される直流電流を抵抗器736へ流入させる。
前記所定の電圧は、高周波電源装置41(直流入力部412)の耐圧以下の電圧である。このため、供給量制御回路735は、電源回生装置73の出力電圧Vo が所定の電圧以上である場合に、回収した回生電力を、抵抗器736で熱として消費させることによって、電源回生装置73の出力電圧Voが高周波電源装置41に対して過電圧になることを防止している。
なお、高周波電源装置41に回生電力を回収させるだけでなく、実施の形態2のように、商用電源9にも回生電力を回収させるよう構成しても良い。この場合、システム内部へ電力を供給する必要がない場合(例えばシステム内部の全てのモータが回生電力を発生させている場合)、回生電力を商用電源9へ回収させて、商用電源9に接続されている他の非接触給電システム又は負荷等で有効利用することができる。
本実施の形態においては、高周波電源装置41へ過剰な電圧の回生電力を供給してしまうことを防止する抵抗器736及び供給量制御回路735を、電源回生装置73に備えており、非接触給電装置52には備えていないため、非接触給電装置52が抵抗器736及び供給量制御回路735を備える分だけ大型化することが防止され(非接触給電装置52の省スペース化)、また、非接触給電装置52での発熱が小さくなり、熱による悪影響が低減される。
また、高周波電源装置41は、一般に地上に設置されるため、抵抗器736及び供給量制御回路735を備えるスペースの制約が少なくなり、抵抗器736及び供給量制御回路735による制動能力を十分に大きく取ることができる。
なお、電源回生装置73から高周波電源装置41へ回生電力を供給する構成のみならず、電源回生装置73の抵抗器736にて全ての回生電力を熱として消費する構成も考えられる。
(実施の形態 5.)
図17は、本発明の実施の形態5に係る非接触給電システムが備える非接触給電装置55の構成を示す電気回路図である。以下では、実施の形態1に対応する部分には同一符号を付してそれらの説明を省略する。
図17は、本発明の実施の形態5に係る非接触給電システムが備える非接触給電装置55の構成を示す電気回路図である。以下では、実施の形態1に対応する部分には同一符号を付してそれらの説明を省略する。
非接触給電装置55は、実施の形態1の非接触給電装置51に対応し、非接触給電装置51が備える蓄電部8の代わりに、蓄電部89を備える。
蓄電部89は、充放電制御回路84と、スーパーコンデンサを用いてなる蓄電回路86と、インダクタ85と、トランジスタ871及びダイオード872を有する充電回路87と、トランジスタ881及びダイオード882を有する放電回路88を備え、蓄電回路86は、インダクタ85と、充電回路87及び放電回路88の夫々とを介して、DCバスDBに接続されている。また、充放電制御回路84も、DCバスDBに接続されている。
充放電制御回路84(第1制御回路)は、受電回路5の出力部の電圧Vを検出する検出部84aと、蓄電回路86の電圧Vc を検出する検出部84bと、蓄電回路86に対し流入出する電流Icを検出する電流センサ(CT)841とを備える。
蓄電回路86の定格電圧は、例えば54Vであり、受電回路5の最大電圧及び回生電力の最大電圧(例えば360V)より小さい。また、蓄電回路86を充電する場合、蓄電回路86の定格電圧より適宜の値だけ小さい電圧(例えば50V)を有する直流の定電流を蓄電回路86に流入させる必要がある。蓄電部89は充電回路87及び放電回路88等で構成された昇圧降圧回路であり、蓄電回路86に対して降圧して充電し、蓄電回路86から放電された電力を昇圧してモータM1,M2,…側へ出力する。
以上のような非接触給電装置55は、実施の形態1の非接触給電装置51と同様に、蓄電回路86に対して回生電力を充放電することによって、回生電力を回収し、移動体2内で有効に利用することができる。
なお、充放電制御回路84は、実施の形態1の充放電制御回路80と同様にしてアナログ回路として構成しても良く、デジタル回路として構成しても良い。
4,41高周波電源装置
40 給電線(給電線,受電手段)
5 受電回路
51,52,53,55 非接触給電装置
6 給電回路(供給手段)
60 充放電制御回路(第1制御回路)
62 高周波インバータ
621 インバータ部(第3スイッチ回路)
63 供給コイル(供給部)
70 受電線(受電手段)
71,72,73 電源回生装置
80,84 充放電制御回路(第2制御回路)
81,87 充電回路(第1スイッチ回路)
82,88 放電回路(第2スイッチ回路)
83,86 蓄電回路
9 商用電源
M1,M2 モータ
40 給電線(給電線,受電手段)
5 受電回路
51,52,53,55 非接触給電装置
6 給電回路(供給手段)
60 充放電制御回路(第1制御回路)
62 高周波インバータ
621 インバータ部(第3スイッチ回路)
63 供給コイル(供給部)
70 受電線(受電手段)
71,72,73 電源回生装置
80,84 充放電制御回路(第2制御回路)
81,87 充電回路(第1スイッチ回路)
82,88 放電回路(第2スイッチ回路)
83,86 蓄電回路
9 商用電源
M1,M2 モータ
Claims (10)
- 交流電流が流れる給電線から非接触で受電してモータへ給電する受電回路を備える非接触給電装置において、
モータの回生電力を蓄電する蓄電回路を備えることを特徴とする非接触給電装置。 - 前記蓄電回路への回生電力の供給を入断する第1スイッチ回路と、
前記受電回路の電圧を検出する手段、検出した電圧と所定の第1電圧とを比較する手段、及び、比較結果の高/低に応じて、前記第1スイッチ回路の入/断を制御する手段を有する第1制御回路とを備えることを特徴とする請求項1に記載の非接触給電装置。 - 前記蓄電回路からの放電を入断する第2スイッチ回路を備え、
前記第1制御回路は、検出した電圧と前記第1電圧より低い第2電圧とを比較する手段、検出した電圧が前記第2電圧以下である場合、前記第2スイッチ回路を入にする手段、及び、検出した電圧が前記第1電圧以上である場合、前記第2スイッチ回路を断にする手段を更に有することを特徴とする請求項2に記載の非接触給電装置。 - 前記第1制御回路は、検出した電圧と前記第1電圧より低く前記第2電圧より高い第3電圧とを比較する手段、及び、前記第2スイッチ回路が入にされている場合に、検出した電圧が前記第3電圧以下であるとき、前記第2スイッチ回路を断にする手段を更に有することを特徴とする請求項3に記載の非接触給電装置。
- 交流電流が流れる給電線から非接触で受電してモータへ給電する非接触給電装置において、
モータの回生電力を外部の受電手段へ供給する供給手段を備えることを特徴とする非接触給電装置。 - 前記受電手段は電線であり、
前記供給手段は、
前記受電手段に誘導結合すべき供給部と、
該供給部への回生電力の供給を入断する第3スイッチ回路と
を備えることを特徴とする請求項5に記載の非接触給電装置。 - 交流電流が流れる給電線から非接触で受電してモータへ給電するための受電回路を備え、
前記供給手段は、
前記受電回路の電圧を検出する手段、及び、該手段が検出した電圧の高/低に応じて、前記第3スイッチ回路の入/断を制御する手段を有する第2制御回路を備えることを特徴とする請求項6に記載の非接触給電装置。 - 交流電流が流れる給電線と請求項1乃至4の何れか一項に記載の非接触給電装置とを備えることを特徴とする非接触給電システム。
- 商用電源から受電して交流電流を出力する電源装置と、該電源装置から出力された交流電流が流れる給電線と、該給電線から非接触で受電してモータへ給電する非接触給電装置とを備える非接触給電システムにおいて、
前記非接触給電装置は請求項5乃至7の何れか一項に記載の非接触給電装置であり、
該非接触給電装置が供給する回生電力を受電する受電手段と、
該受電手段が受電した回生電力を、前記商用電源又は前記電源装置へ供給する手段と
を備えることを特徴とする非接触給電システム。 - 商用電源から受電して交流電流を出力する電源装置と、該電源装置から出力された交流電流が流れる給電線と、該給電線から非接触で受電してモータへ給電する非接触給電装置とを備える非接触給電システムにおいて、
前記非接触給電装置は請求項5乃至7の何れか一項に記載の非接触給電装置であり、
該非接触給電装置が供給する回生電力を受電する受電手段は前記給電線であり、
該給電線が受電した回生電力を、前記商用電源又は前記電源装置へ供給する手段を備えることを特徴とする非接触給電システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106833A JP2005295680A (ja) | 2004-03-31 | 2004-03-31 | 非接触給電装置及び非接触給電システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106833A JP2005295680A (ja) | 2004-03-31 | 2004-03-31 | 非接触給電装置及び非接触給電システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005295680A true JP2005295680A (ja) | 2005-10-20 |
Family
ID=35328008
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004106833A Pending JP2005295680A (ja) | 2004-03-31 | 2004-03-31 | 非接触給電装置及び非接触給電システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005295680A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101056166B1 (ko) | 2009-12-23 | 2011-08-11 | 한국과학기술원 | 비접촉 자기 유도 충전 방식을 갖는 전기자동차의 전력 공급 제어 시스템 |
| JP2012257395A (ja) * | 2011-06-09 | 2012-12-27 | Toyota Motor Corp | 非接触受電装置およびそれを備える車両、非接触送電装置、ならびに非接触電力伝送システム |
| JP2013232996A (ja) * | 2012-04-27 | 2013-11-14 | Toshiba Schneider Inverter Corp | インバータ装置及びインバータ受電装置 |
| JP2014039423A (ja) * | 2012-08-20 | 2014-02-27 | Toshiba Schneider Inverter Corp | インバータ装置、インバータオプション装置及び外部電源装置 |
| WO2014038017A1 (ja) * | 2012-09-05 | 2014-03-13 | 富士機械製造株式会社 | 非接触給電装置 |
| JP2018183012A (ja) * | 2017-04-21 | 2018-11-15 | 東洋電機製造株式会社 | 電力変換装置 |
-
2004
- 2004-03-31 JP JP2004106833A patent/JP2005295680A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101056166B1 (ko) | 2009-12-23 | 2011-08-11 | 한국과학기술원 | 비접촉 자기 유도 충전 방식을 갖는 전기자동차의 전력 공급 제어 시스템 |
| JP2012257395A (ja) * | 2011-06-09 | 2012-12-27 | Toyota Motor Corp | 非接触受電装置およびそれを備える車両、非接触送電装置、ならびに非接触電力伝送システム |
| JP2013232996A (ja) * | 2012-04-27 | 2013-11-14 | Toshiba Schneider Inverter Corp | インバータ装置及びインバータ受電装置 |
| JP2014039423A (ja) * | 2012-08-20 | 2014-02-27 | Toshiba Schneider Inverter Corp | インバータ装置、インバータオプション装置及び外部電源装置 |
| WO2014038017A1 (ja) * | 2012-09-05 | 2014-03-13 | 富士機械製造株式会社 | 非接触給電装置 |
| CN104604089A (zh) * | 2012-09-05 | 2015-05-06 | 富士机械制造株式会社 | 非接触供电装置 |
| JPWO2014038017A1 (ja) * | 2012-09-05 | 2016-08-08 | 富士機械製造株式会社 | 非接触給電装置 |
| CN104604089B (zh) * | 2012-09-05 | 2017-07-21 | 富士机械制造株式会社 | 非接触供电装置 |
| JP2018183012A (ja) * | 2017-04-21 | 2018-11-15 | 東洋電機製造株式会社 | 電力変換装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3900822B2 (ja) | 非接触で給電される移動体の電源回路 | |
| JP4574643B2 (ja) | バッテリ駆動の鉄道列車 | |
| KR101214295B1 (ko) | 전력 공급 장치 및 이를 구비한 고무 타이어 갠트리 크레인 | |
| KR101569189B1 (ko) | 도심운행을 위한 트램차량용 무선 전력 전송 시스템 | |
| TWI625257B (zh) | 電車控制裝置 | |
| JP2009242088A (ja) | クレーン装置 | |
| CN106663528A (zh) | 适合于电动车辆的感应式电力系统 | |
| KR20110058669A (ko) | 주행차 시스템과 주행차로의 비접촉 급전 방법 | |
| CN108059042A (zh) | 电气自主的电梯系统 | |
| KR101715272B1 (ko) | 전기 차량의 온라인 무선 전력 전송용 하이브리드 시스템 제어 방법 | |
| US9083194B2 (en) | Battery charging system and train | |
| JP2010187471A (ja) | 非接触受電装置および無人搬送車 | |
| JP2018107907A (ja) | 搬送台車 | |
| JP4576465B2 (ja) | 架線レス交通車両の充電方法及び充電システム | |
| JP4415874B2 (ja) | 交通システムの充放電方法 | |
| JP2012175803A (ja) | 電力蓄積手段を備える鉄道システム | |
| CN114867628B (zh) | 用于运行电动车辆的方法和电动车辆 | |
| KR20180092203A (ko) | 철도차량용 무선 급전전력 안정화를 위한 에너지 저장장치 | |
| JP2005295680A (ja) | 非接触給電装置及び非接触給電システム | |
| JP3768982B2 (ja) | 間歇給電式電気車両システムおよび電気車両 | |
| KR20160082945A (ko) | 무선충전식 모노레일 시스템 | |
| JP2010089855A (ja) | クレーン装置およびクレーン装置の制御方法 | |
| JP2003220859A (ja) | 直流機電用電力蓄積装置及び鉄道機電システム | |
| JP7786421B2 (ja) | 電動車両の充電システムおよびコンピュータプログラム | |
| KR100797115B1 (ko) | 전동차의 유도 급전 설비 시스템 |