JP2005218202A - Actuator and bonding apparatus - Google Patents
Actuator and bonding apparatus Download PDFInfo
- Publication number
- JP2005218202A JP2005218202A JP2004020434A JP2004020434A JP2005218202A JP 2005218202 A JP2005218202 A JP 2005218202A JP 2004020434 A JP2004020434 A JP 2004020434A JP 2004020434 A JP2004020434 A JP 2004020434A JP 2005218202 A JP2005218202 A JP 2005218202A
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- rectilinear
- bonding apparatus
- along
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies
- H01L24/78—Apparatus for connecting with wire connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/42—Wire connectors; Manufacturing methods related thereto
- H01L2224/44—Structure, shape, material or disposition of the wire connectors prior to the connecting process
- H01L2224/45—Structure, shape, material or disposition of the wire connectors prior to the connecting process of an individual wire connector
- H01L2224/45001—Core members of the connector
- H01L2224/45099—Material
- H01L2224/451—Material with a principal constituent of the material being a metal or a metalloid, e.g. boron (B), silicon (Si), germanium (Ge), arsenic (As), antimony (Sb), tellurium (Te) and polonium (Po), and alloys thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/78—Apparatus for connecting with wire connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/78—Apparatus for connecting with wire connectors
- H01L2224/786—Means for supplying the connector to be connected in the bonding apparatus
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/85—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected using a wire connector
- H01L2224/851—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected using a wire connector the connector being supplied to the parts to be connected in the bonding apparatus
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/0001—Technical content checked by a classifier
- H01L2924/00014—Technical content checked by a classifier the subject-matter covered by the group, the symbol of which is combined with the symbol of this group, being disclosed without further technical details
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01005—Boron [B]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01006—Carbon [C]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01033—Arsenic [As]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01051—Antimony [Sb]
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Wire Bonding (AREA)
- Die Bonding (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
Description
本発明はアクチュエータ及びボンディング装置に係り、特に対象物を任意の位置に移動させるアクチュエータ及びボンディング作業を行うボンディング部を任意の位置に移動させる移動機構を備えるボンディング装置に関する。 The present invention relates to an actuator and a bonding apparatus, and more particularly to an actuator that moves an object to an arbitrary position and a bonding apparatus that includes a moving mechanism that moves a bonding portion that performs a bonding operation to an arbitrary position.
ワイヤボンダーやダイボンダー等のボンディング装置は、ボンディングヘッド部先端に取り付けられたボンディングツールを平面内の任意の位置に移動させてボンディング作業を行う。これらのボンディング装置の多くは、特許文献1に示されるように、X方向にのみ移動可能なXテーブルと、Y方向にのみ移動可能なYテーブルとを積層したいわゆるXYテーブルと、さらにそれぞれを駆動する駆動源を備えている。ここでボンディングヘッド部をXYテーブル上に搭載し、駆動源によりXYテーブルを駆動することで、ボンディングツールをXY平面の任意の位置に移動させることができる。 A bonding apparatus such as a wire bonder or a die bonder performs a bonding operation by moving a bonding tool attached to the tip of a bonding head to an arbitrary position in a plane. Many of these bonding apparatuses drive an X table that can move only in the X direction and a so-called XY table in which a Y table that can move only in the Y direction is stacked, as shown in Patent Document 1. A drive source is provided. Here, the bonding head unit is mounted on the XY table, and the XY table is driven by a drive source, whereby the bonding tool can be moved to an arbitrary position on the XY plane.
また、特許文献2には、リニアモータでスライドを直進させ、スライドの上のロータリービーム(回転梁)を第2リニアモータで回転させ、ロータリービームに搭載されているキャピラリの位置決めを行う技術が開示されている。
ボンディング装置に対する高速化の要求はますます高まってきており、そのためにボンディングヘッド部を任意の位置に高速で位置決めすることが望まれる。 The demand for high-speed bonding devices is increasing, and for this purpose, it is desirable to position the bonding head at an arbitrary position at high speed.
従来技術においては、平面内の2自由度の移動について、各自由度ごとの駆動源を用いている。例えばXYテーブル方式の場合においては、Xテーブル用の駆動源とYテーブル用の駆動源とが備えられ、特許文献2のスライド+回転方式の場合でもスライド駆動用リニアモータと、回転駆動用の第2リニアモータとが備えられる。したがって、例えばX方向の直進運動をしているときは、Yテーブル駆動源あるいは回転駆動源はX方向の推力に何ら寄与していない。また、Yテーブル駆動源がXテーブルの上に搭載され、あるいは回転駆動源がスライド上に搭載されるような場合には、X方向の加速度を減ずる方向に作用することにもなる。
In the prior art, a drive source for each degree of freedom is used for movement with two degrees of freedom in a plane. For example, in the case of the XY table method, a drive source for the X table and a drive source for the Y table are provided. Even in the case of the slide + rotation method of
このように従来技術においては、駆動源を各自由度ごとに備えるために、任意の位置に高速に移動するという運動全体にとって各駆動源が必ずしも効率よく用いられていず、場合によっては一方の駆動源の存在によって他方駆動における加速度を減ずる方向に働くこともある。 Thus, in the prior art, each drive source is not always efficiently used for the entire movement of moving to an arbitrary position at high speed in order to provide the drive source for each degree of freedom. The presence of the source may work to reduce the acceleration in the other drive.
本発明の目的は、かかる従来技術の課題を解決し、より高速に任意の位置に移動することを可能にするアクチュエータ及びボンディング装置を提供することである。 An object of the present invention is to solve the problems of the prior art and provide an actuator and a bonding apparatus that can move to an arbitrary position at a higher speed.
上記目的を達成するため、本発明に係るアクチュエータは、所定の直進軸に沿って直進及び回転可能な回転体と、回転体の両側に配置され直進軸に沿ってそれぞれ移動可能な1組の左右直進部材と、1組の左右直進部材をそれぞれ駆動する駆動部と、左右直進部材と回転体とを連結し、左右直進部材の組合せ運動を回転体に伝達する伝達部と、を備えることを特徴とする。 In order to achieve the above object, an actuator according to the present invention includes a rotating body that can linearly move and rotate along a predetermined rectilinear axis, and a pair of left and right motors that are arranged on both sides of the rotating body and are movable along the rectilinear axis. A linear drive member, a drive unit that drives each of the set of left and right linear drive members, and a transmission unit that connects the left and right linear drive members and the rotating body, and transmits the combined motion of the left and right linear drive members to the rotary body. And
また、本発明に係るボンディング装置は、ボンディング対象に対しボンディングを行うボンディングヘッドを含み、所定の直進軸に沿って直進及び回転可能な回転体と、回転体の両側に配置され直進軸に沿ってそれぞれ移動可能な1組の左右直進部材と、1組の左右直進部材をそれぞれ駆動する駆動部と、左右直進部材と回転体とを連結し、左右直進部材の組合せ運動を回転体に伝達する伝達部と、を備えることを特徴とする。 In addition, the bonding apparatus according to the present invention includes a bonding head that performs bonding to a bonding target, and includes a rotating body that can linearly move and rotate along a predetermined rectilinear axis, and a rotating body that is disposed on both sides of the rotating body along the rectilinear axis. A pair of left and right rectilinear members that can move, a drive unit that drives each pair of left and right rectilinear members, a left and right rectilinear member and a rotating body are connected, and the combined motion of the left and right rectilinear members is transmitted to the rotating body. And a section.
また、伝達部は、左移動部材の直進軸に沿った前方部と回転体の左側面とを接続する左前方接続部材と、左移動部材の直進軸に沿った後方部と回転体の左側面とを接続する左後方接続部材と、右移動部材の直進軸に沿った前方部と回転体の右側面とを接続する右前方接続部材と、右移動部材の直進軸に沿った後方部と回転体の右側面とを接続する右後方接続部材と、を含むことが好ましい。 In addition, the transmission unit includes a left front connecting member that connects the front part along the straight axis of the left moving member and the left side surface of the rotating body, and a rear part along the straight axis of the left moving member and the left side surface of the rotating body. A left rear connecting member for connecting the right moving member, a right front connecting member for connecting the front portion along the straight axis of the right moving member and the right side surface of the rotating body, and a rear portion along the straight shaft of the right moving member for rotation. It is preferable to include a right rear connection member that connects the right side surface of the body.
また、伝達部は、回転体の側面に沿ってU字巻きされ、その中心部分が回転体に固定される1組の前方後方U字巻部材であって、各端部が左直進部材の直進軸に沿った前方部と右直進部材の直進軸に沿った前方部とにそれぞれ固定される前方U字巻部材と、各端部が左直進部材の直進軸に沿った後方部と右直進部材の直進軸に沿った後方部とにそれぞれ固定される後方U字巻部材とを含むことが好ましい。 The transmission unit is a set of front-rear U-shaped winding members that are U-shaped along the side surface of the rotating body, and whose central portion is fixed to the rotating body, and each end portion is a straight traveling of the left rectilinear member. A front U-shaped winding member fixed to a front part along the axis and a front part along the straight axis of the right rectilinear member, and a rear part and a right rectilinear member whose ends are along the straight axis of the left rectilinear member It is preferable that the rear U-shaped winding member fixed to the rear part along the straight axis of each is included.
また、伝達部は、回転体の側面に沿ってアルファ巻きされ、その中心部分が回転体に固定される1組の左右アルファ巻部材であって、各端部が左直進部材の直進軸に沿った前方部と後方部とにそれぞれ固定される左アルファ巻部材と、各端部が右直進部材の直進軸に沿った前方部と後方部とにそれぞれ固定される右アルファ巻部材とを含むことが好ましい。 Further, the transmission portion is a set of left and right alpha winding members that are alpha-wound along the side surface of the rotating body and whose central portion is fixed to the rotating body, and each end portion is along the rectilinear axis of the left rectilinear member. A left alpha winding member fixed to the front part and the rear part, respectively, and a right alpha winding member each end part fixed to the front part and the rear part along the rectilinear axis of the right rectilinear member. Is preferred.
また、伝達部は、複数のベルトで構成されることが好ましい。また、伝達部は、複数のワイヤで構成されることが好ましい。 Moreover, it is preferable that a transmission part is comprised with a some belt. Moreover, it is preferable that a transmission part is comprised with a some wire.
また、回転体は、左右直進部材の組合せ運動の伝達を受ける両側部分の間の距離が回転体の回転によって変化しないことが好ましい。また、回転体の両側部分の間の距離が回転により変化しない部分は、円形の一部であることが好ましい。また、回転体の両側部分の間の距離が回転により変化しない部分は、図形回転軸を共通にして向かい合う2つの扇形状の一部であることが好ましい。 In the rotating body, it is preferable that the distance between both side portions that receive the combined motion of the right and left rectilinear members does not change due to the rotation of the rotating body. Moreover, it is preferable that the part where the distance between the both side parts of a rotary body does not change with rotation is a part of a circle. Moreover, it is preferable that the part where the distance between the both side parts of a rotary body does not change with rotation is a part of two fan shape which faces a common figure rotation axis.
また、回転体は、左右直進部材により案内されることが好ましい。また、左右直進部材及び回転体の少なくとも一方は、流体圧支持機構により支持されることが好ましい。また、駆動部は、1組の左右リニアモータであることが好ましい。 Moreover, it is preferable that a rotary body is guided by the right-and-left rectilinear member. Moreover, it is preferable that at least one of the left-right rectilinear member and the rotating body is supported by a fluid pressure support mechanism. The drive unit is preferably a set of left and right linear motors.
上記構成の少なくとも1つにより、回転体の両側に直進軸に沿って移動可能な1組の左右直進部材を配置し、左右直進部材と回転体とを伝達部で連結し、駆動部により1組の左右直進部材をそれぞれ直進駆動する。このような構成において、伝達部は左右直進部材の組合せ運動を回転体に伝達する。例えば、左直進部材と右直進部材とが互いに反対方向に同じ移動量だけ直進移動するときは、回転体においては直進運動が相殺され、回転運動のみが行われる。また、左直進部材と右直進部材とが互いに同一方向に同じ移動量だけ直進移動するときは、回転体において回転運動が相殺され、直進運動のみが行われる。左直進部材の直進移動量と右直進部材の直進移動量とが異なるときは、回転体においては直進と回転との組み合わされた運動が行われることになる。 According to at least one of the above-described configurations, a pair of left and right rectilinear members movable along the rectilinear axis are disposed on both sides of the rotating body, the left and right rectilinear members and the rotating body are connected by a transmission unit, and one set is configured by a drive unit Each of the left and right rectilinear members is driven straight. In such a configuration, the transmission unit transmits the combined motion of the left and right rectilinear members to the rotating body. For example, when the left rectilinear member and the right rectilinear member move rectilinearly by the same amount of movement in opposite directions, the rectilinear motion is canceled in the rotating body, and only the rotational motion is performed. Further, when the left rectilinear member and the right rectilinear member linearly move in the same direction by the same amount of movement, the rotational motion is canceled in the rotating body, and only the linear motion is performed. When the amount of rectilinear movement of the left rectilinear member differs from the amount of rectilinear movement of the right rectilinear member, a combined motion of rectilinear movement and rotation is performed in the rotating body.
このようにして、左右直進部材の駆動を制御することで回転体を任意の位置に移動させることができる。したがって、左右直進部材をそれぞれ駆動する2つの駆動源は、双方あいまって回転体の運動に対する推力あるいはトルクを供給している。つまり、2つの駆動源の一方側が働いているときに他方側が遊んでいる、あるいは他方側の負荷となるということがなく、全体の運動に対し、より効率的な駆動源とすることができ、回転体あるいはそれに搭載されるボンディングヘッドをより高速に任意の位置に移動させることができる。 In this way, the rotating body can be moved to an arbitrary position by controlling the drive of the right and left rectilinear members. Therefore, the two drive sources for driving the right and left rectilinear members respectively supply thrust or torque for the motion of the rotating body together. In other words, when one side of the two drive sources is working, the other side is idle or does not become a load on the other side, and can be a more efficient drive source for the entire movement, The rotating body or the bonding head mounted thereon can be moved to an arbitrary position at a higher speed.
また、上記構成の少なくとも1つにより、伝達部は、回転体の側面に沿った巻部材を用いる。巻部材としては、回転体に巻き付けてアルファ巻としたものを2つ用いるもの、U字巻としたものを2つ用いるもの、4つに分けて回転体の側面と左右直進部材の前方、後方とを接続したものを用いることができる。巻部材としてはベルト、ワイヤを用いることができる。例えば、巻部材を張力のかかった状態で固定するなどにより、簡単な構造で左右直進部材の組合せ運動を回転体に確実に伝達することができる。 Further, according to at least one of the above configurations, the transmission unit uses a winding member along the side surface of the rotating body. As the winding member, use two that are wound around the rotating body and use alpha winding, two that use U-shaped winding, use four parts, the side of the rotating body and the front and rear of the left and right rectilinear members Can be used. A belt or a wire can be used as the winding member. For example, by fixing the winding member in a tensioned state, the combined motion of the left and right rectilinear members can be reliably transmitted to the rotating body with a simple structure.
また、上記構成の少なくとも1つにより、回転体は、その両側部分の間の距離が変化しない。具体的には、図形回転軸を共通として向かい合う2つの扇形を含んだ形状などが挙げられる。各扇形の半径が等しい場合は、それは円形の一部と等しい。また、その他にもどの方向から見ても幅が等しい、いわゆる等幅図形の一部を用いることができる。 Further, due to at least one of the above configurations, the distance between both side portions of the rotating body does not change. Specifically, a shape including two sectors facing each other with a common figure rotation axis can be used. If each sector has the same radius, it is equal to a portion of a circle. In addition, it is possible to use a part of a so-called uniform width graphic having the same width when viewed from any direction.
また、上記構成の少なくとも1つにより、回転体は左右直進部材によって案内される。したがって特別な案内機構を要せず、構成が簡単となる。また、上記構成の少なくとも1つにより、左右直進部材及び回転体の少なくとも一方は、流体圧支持機構により支持される。これにより、左右直進部材や回転体の移動の負荷を軽減でき、より高速な移動を行うことができる。また、上記構成の少なくとも1つにより、1組のリニアモータにより左右直進部材を駆動する。各リニアモータは同じものを用いることができ、構成部品の種類を減らすことができる。 Further, the rotating body is guided by the left-right rectilinear member by at least one of the above-described configurations. Therefore, a special guide mechanism is not required and the configuration is simple. Moreover, at least one of the left-right rectilinear member and the rotating body is supported by the fluid pressure support mechanism by at least one of the above-described configurations. Thereby, the load of movement of the right-and-left rectilinear member and the rotating body can be reduced, and higher-speed movement can be performed. In addition, the left / right rectilinear member is driven by one set of linear motors by at least one of the above-described configurations. Each linear motor can use the same thing, and can reduce the kind of component.
以上のように、本発明に係るアクチュエータ及びボンディング装置によれば、より高速に任意の位置に移動することが可能となる。 As described above, according to the actuator and the bonding apparatus according to the present invention, it is possible to move to an arbitrary position at a higher speed.
以下に図面を用いて本発明に係る実施の形態につき詳細に説明する。以下において、ボンディング装置はワイヤボンダーとして説明するが、ダイボンダー、フェイスダウンボンダー等のボンディング装置であってもよい。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. Hereinafter, the bonding apparatus will be described as a wire bonder, but may be a bonding apparatus such as a die bonder or a face down bonder.
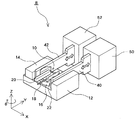
図1は、ワイヤボンダー8の部分図で、特にボンディングヘッド部10を任意の位置に移動させる移動機構の部分を示す図である。ワイヤボンダー8の移動機構の部分は、ボンディングヘッド部10と、ボンディングヘッド部10の移動を案内するステージ12及びサイド案内部14と、複数の金属ベルト22等を介してボンディングヘッド部10を駆動する1組の駆動軸40,42と、駆動軸40,42を直進駆動する1組のリニアモータ50,52とを含んで構成される。ここで、ボンディングヘッド部10の周辺以外の要素について先に説明し、次にボンディングヘッド部10の周辺の要素につき詳述する。
FIG. 1 is a partial view of the
1組の駆動軸40,42は、後述するボンディングヘッド部10の回転体16を両側から平行に挟むように配置される1組の同一形状の板で、いわば、回転体16を左右から挟む左右直進部材である。駆動軸40,42の先端側で回転体16に向かい合う面には、後述するように回転体16との間の伝達部としての金属ベルト22等が取り付けられる。駆動軸40,42の後端側は、それぞれ駆動源としてのリニアモータ50,52に接続される。
The pair of
1組の駆動軸40,42の回転体16に向かい合う面の裏側の面は、それぞれステージ12の立ち上がり壁面と、サイド案内部14の側面とに案内される。ステージ12の立ち上がり壁面とそれに向かい合うサイド案内部14の側面とは互いに平行に配置され、特にステージ12の立ち上がり壁面は、リニアモータ50,52の直進軸に平行に配置される。サイド案内部14は、図示されていない付勢手段によって適当な圧力で図1の+X軸方向に押し付けられ、これにより駆動軸42、回転体16、駆動軸40をステージ12の立ち上がり壁面に倣わせて移動するものとすることができる。付勢手段としては適当なバネ等を用いることができる。
The back surface of the pair of
また、ステージ12の立ち上がり面とこれに向かい合う駆動軸40の面との間、及びサイド案内部14の側面とこれに向かい合う駆動軸42の面との間に、それぞれエアベアリング等の流体圧支持機構を設けるものとしてもよい。流体圧支持機構としては、例えば、ステージ12の立ち上がり面又はサイド案内部14の側面と、駆動軸40,42の側面との間でエアー吹き出しと真空吸引が行うものとすることができる。
Further, a fluid pressure support mechanism such as an air bearing is provided between the rising surface of the
1組のリニアモータ50,52は、それぞれ駆動軸40,42を直進駆動する同一性能の駆動源で、全体としてボンディングヘッド部10の駆動部を構成する。かかるリニアモータ50,52としては、コイルと永久磁石とを用いる一般的なリニアモータを用いることができる。
One set of
次に、ボンディングヘッド部10の周辺につき説明する。ボンディングヘッド部10は、円筒状の部材の上側に幅広の溝を設けた回転体16と、その幅広溝の中に搭載されるボンディング作業のためのボンディングツール18や位置決めカメラ20等から構成される。ボンディングツール18等を搭載したボンディングヘッド部10全体の重心は、回転体16の円筒状の回転中心軸にできるだけ一致させることが好ましい。
Next, the periphery of the
回転体16の底面は平坦に加工され、ステージ12の平坦面との間にエアベアリング等の流体圧支持機構が設けられる。流体圧支持機構としては、例えば、ステージ12の上面と回転体16の底面との間でエアー吹き出しと真空吸引が行うものとすることができる。これにより、ボンディングヘッド部10はステージ12の平面上を流体圧により支持されながら、後述のように図1に示すY軸に沿って直進及び回転し、XY平面内の任意の位置に移動することができる。
The bottom surface of the
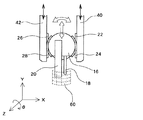
回転体16は、上部の幅広溝によりその側面の一部が切り欠かれ、上部が切り欠きのある部分円筒状、下部が全円筒状となっており、その側面と、各駆動軸40,42のそれぞれとの間は、3個ずつの金属ベルトにより連結される。駆動軸40と回転体16との間を連結する3個の金属ベルト22a,22b,24の様子を図2に示す。3個の金属ベルトの中で2個の金属ベルト22a,22bは、駆動軸40の回転体16に向かい合う面の前方部、すなわち図2に示す−Y方向の先端側に各一端が固定され、各他端は回転体16の側面に固定される。もう1つの金属ベルト24は、駆動軸40の回転体16に向かい合う面の後方部、すなわち前方部より+Y方向の後方部に一端が固定され、他端は回転体16の側面に固定される。なお、回転体16ともう1つの駆動軸42との間の金属ベルトによる連結も同様に行われる。
The rotating
これらの金属ベルト22a,22b,24は、2個の金属ベルト22a,22bともう1つの金属ベルト24とが図2のZ軸方向から見て交差するように回転体16の側面と、駆動軸40の回転体16に向かい合う面との間で連結される。交差するところは、回転体16と駆動軸40とを配置したときに相互に接するところである。すなわち、各金属ベルト22a,22b,24は、回転体16に固定される位置から回転体16の側面に沿って巻きつけられ、交差位置で回転体16の側面の接線方向にまっすぐ延びて駆動軸40に固定される。
These
各金属ベルト22a,22b,24と回転体16及び駆動軸40との間の固定は、例えばスポット溶接、あるいはピン止め等により行うことができる。この固定に対しては、各金属ベルト22a,22b,24が弛むことなく張力をもって張り付けられるように行うことが好ましい。金属ベルト22a,22b,24の材質は、回転体16の繰り返し正回転反回転に伴う繰り返し曲げに耐える金属が選ばれる。例えば、スエーデン鋼と呼ばれる屈曲曲げ特性の良い材料の薄板を用いることができる。
The fixing between the
2個の金属ベルト22a,22bは、これを1つの金属ベルトとしてもよい。また、回転体16と駆動軸40,42との間の連結を計6個あるいは計4個の短い金属ベルトで行うのに代えて、1組の金属ベルト、すなわち2個の金属ベルトを用いて行うこともできる。図3は、回転体16と駆動軸40,42との間の連結法について3つの方法を並べて示す平面図である。図3(a)は、図1、図2で説明した6個又は4個の金属ベルト22,24,26,28を用いるものである。ここで金属ベルト22,26を実線で示し、その回転体16及び図示されていない駆動軸40,42に固定するための固定ピンの様子も図示してある。また、金属ベルト24,28については、金属ベルト22,26と同様であるので、概略のみ破線で示すに留めてある。
The two
図3(b)は、いわゆるアルファ巻ベルト30,32を用いるものである。ここでアルファ巻きとは、回転体16の側面に沿って一周巻きつけ、その一周巻きしたところで交差させ、各端部を回転体16の側面の接線方向に互いに反対方向に延ばす巻き方で、平面図でこれを見るとαの形に見えるものをいう。図3(b)では一方のアルファ巻ベルト30を実線で示し、その回転体16及び図示されていない駆動軸40,42に固定するための固定ピンの様子も図示してある。また、もう一方のアルファ巻ベルト32も同様であるので、概略のみ破線で示すに留めてある。
FIG. 3B uses so-called
図3(c)は、いわばU字巻きとでもいえる金属ベルト34,36を用いるものである。この巻き方は、回転体16の側面に沿って半周巻きつけ、その半周巻きしたところで各端部を回転体16の側面の接線方向に互いに反対方向に延ばす巻き方で、平面図でこれを見るとUの形に見えるものである。図3(c)では一方のU字巻きされた金属ベルト30を実線で示し、その回転体16及び図示されていない駆動軸40,42に固定するための固定ピンの様子も図示してある。また、もう一方のU字巻きされた金属ベルト32も同様であるので、概略のみ破線で示すに留めてある。また、アルファ巻きと短い金属ベルトとの組合せ、U字巻きと短い金属ベルトとの組合せも当然可能である。
FIG. 3C uses
図4は、回転体16と、1組の直進部材である駆動軸40,42との間を適当な張力を有する金属ベルト22,24,26,28を用いて連結したときの駆動軸40,42の組合せ運動が回転体16に伝達される様子を説明する図である。1組の駆動軸42,40のY軸に沿った直進移動y1,y2の方向、その大きさにより、回転体16は、Y軸に沿った直進Yと、Z軸周りの回転θを組み合わせた移動を行う。図4には、駆動軸42,40の直進移動y1,y2について5つの例を示してある。
FIG. 4 shows the
第1の例は、y1=y2=+aのとき、すなわち駆動軸40と駆動軸42とが同じ方向に同じ変位量だけ直進移動する場合である。このとき、回転体16においては、回転が行われず、Y軸に沿って+aだけ直進移動が行われる。第2の例は、y1=y2=−aのとき、すなわち第1の例とは反対方向に駆動軸40と駆動軸42とが同じ変位量だけ直進移動する場合である。このときも回転体16においては回転が行われず、Y軸に沿って−aだけ直進移動が行われる。このように、駆動軸40と駆動軸42とを同じ方向に同じ変位量だけ直進移動させることで、回転体16を回転させずに、駆動軸40,42の移動と同じ方向に同じ変位量だけ前進後退させることができる。
The first example is when y 1 = y 2 = + a, that is, when the
第3の例は、y1=+b、y2=−bのとき、すなわち駆動軸40と駆動軸42とが互いに反対方向に絶対値としては同じ変位量だけ直進移動する場合である。このとき、回転体16においては、直進が行われず、Z軸周りに(+b/r)ラジアンだけ回転が行われる。rは回転体16の半径である。第4の例は、y1=−b、y2=+bのとき、すなわち第3の例に対し駆動軸40と駆動軸42の移動方向を取り替えた場合である。このときも回転体16においては直進が行われず、Z軸周りに(−b/r)ラジアンだけ回転が行われる。このように、駆動軸40と駆動軸42とを反対方向に同じ変位量だけ直進移動させることで、回転体16を直進させずに、駆動軸40,42の移動量に応じた角度だけ正転逆転させることができる。
The third example is a case where y 1 = + b and y 2 = −b, that is, the
第5の例は、y1=+a、y2=+bのとき、すなわち駆動軸40と駆動軸42とが同じ方向に異なる変位量でそれぞれ直進移動する場合である。この場合の回転体16の運動は、双方の移動量を平均したものに応じた直進と、双方の移動量の差を2で除したものに応じた回転とを行う。駆動軸40と駆動軸42とが反対方向に絶対値で異なる変位量でそれぞれ直進移動する場合も、回転体16は直進と回転とを組み合わせた運動を行う。
The fifth example is a case where y 1 = + a and y 2 = + b, that is, the
このように、1組の駆動軸40,42を直進駆動し、その組合せ運動を金属ベルト22,24,26,28により回転体16に伝達することで、回転体16に対し、Y軸に沿った直進Yと、Z軸周りの回転θを組み合わせた移動を行わせることができる。
As described above, the pair of
かかる構成のワイヤボンダー8におけるボンディングヘッド部10の移動機構の作用について説明する。ワイヤボンダー8においてワイヤボンディング作業を行うには、所定のボンディングプログラムを起動する。そしてプログラムの手順に従い、例えばチップがダイボンディングされている基板等を供給し、所定の位置に保持する。次に位置決めカメラ20等の手段を用い、ボンディングを行うチップのボンディングパッドの位置を検出し、その位置にボンディングツール18の先端を位置決めする。この位置決めのときに、ボンディングヘッド部10の移動機構が用いられる。具体的には、位置決めカメラ20により検出されたデータ等に基づき、ボンディングツール18を当初の位置からどの位置に移動すべきかの移動量(ΔX,ΔY)を求め、その移動量に対応する回転体16の直進量Yと回転量θを求める。そして、図4で説明した関係に基づき、直進量Yと回転量θの移動のために必要な駆動軸40の直進移動量y1、駆動軸42の直進移動量y2を算出する。これらの算出には適当な換算プログラムを用いることができる。
The operation of the moving mechanism of the
図5に、駆動軸40と駆動軸42にそれぞれ適当な直進移動をさせたときにおけるボンディングツール18の先端の軌跡60の様子を示す。図5において、駆動軸40と駆動軸42がそれぞれ細い矢印で示すように直進移動すると、金属ベルト22,24,26,28によってその組合せ運動が回転体16に伝達され、図4で説明した関係に従い、回転体16は、白抜き矢印で示す直進と回転運動を行う。その結果、ボンディングツール18の先端は、直線と円弧を組み合わせた軌跡60でXY平面内を移動する。この軌跡は、回転体16の半径rと、回転体16の回転中心に対するボンディングツール18の先端との位置関係等に基づき、駆動軸40の移動量y1と駆動軸42の移動量y2とに関係付けることができる。
FIG. 5 shows a state of the
このようにして、ボンディングツール18の移動量(ΔX,ΔY)と、駆動軸42,40の直進移動量(y1,y2)とを関係付け、これを適当なプログラムとすれば、(ΔX,ΔY)を与えて必要な(y1,y2)を得ることができる。得られた駆動軸42,40の直進移動量(y1,y2)に基づき、リニアモータ50,52の駆動電流等の駆動条件を定める。
In this way, if the movement amount (ΔX, ΔY) of the
こうして得られる駆動条件に従ってリニアモータ50,52を駆動すれば、それにより駆動軸42はy1移動し駆動軸40はy2移動する。そして金属ベルト22,24,26,28により回転体16は所定の直進Yと回転θを行う。このとき、ボンディングヘッド部10全体の重心を回転体16の回転中心とほぼ一致する構成とすれば、駆動軸40,42から伝達される駆動力をボンディングヘッド部10全体の重心に効率よく伝達することができる。こうして2つのリニアモータ50,52の駆動力を共に受けて、効率よく高速に、ボンディングツール18の先端は(ΔX,ΔY)だけ移動し、所望の位置に移動する。
If the
上記において、回転体16は、円筒形状、すなわち断面形状が円形として説明した。回転体16は、駆動軸40,42の組合せ運動の伝達を受ける両側部分の間の距離が回転体16の回転によって変化しなければよく、たとえばその部分のところが円形の一部であり、他の部分が任意の形状であってもよい。また、両側部分の間の距離がその回転によって変化しないものとしては、図形回転軸を共通として向かい合う2つの扇形を含んだ形状などが挙げられる。各扇形の半径が等しい場合は、それは円形の一部と等しい。また、その他にもどの方向から見ても幅が等しい、いわゆる等幅図形の一部を用いることができる。図6にそのような図形の例を示す。図6(a)は円形である。図6(c)は、図形回転軸を共通として向かい合う2つの扇形で、図6(b)は、扇形の図形回転軸を他の扇形の上に配置した略おむすび形の図形等である。
In the above description, the rotating
また、上記において、駆動軸40,42の組合せ運動を回転体16に伝達するものとして金属ベルトを説明したが、金属ワイヤであってもよい。
In the above description, the metal belt is described as transmitting the combined motion of the
また、上記において駆動源として、一般的なリニアモータ50,52を説明し、これらはワイヤボンダー8の図示されていない架台に取り付けられるものとして図1に表したが、いわゆる無反動化した駆動源を用いることもできる。無反動化した駆動源とは、駆動軸40,42がワイヤボンダー8の架台に対し移動するのみならず、その反力を逃がすためにリニアモータ50,52の本体部も架台に対し移動可能とするものである。これにより、不要な振動が架台に発生することを防止し、ボンディングヘッド部10の移動をさらに精度よく、さらに高速に行うことができる。
Further, in the above description, general
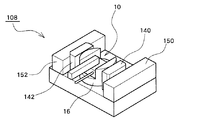
図1の実施の形態では、リニアモータ50,52から駆動軸40,42を延ばしたものを用いたが、ボンディングヘッド部10の両側に直接リニアモータを配置することもできる。図7は、そのような構成のワイヤボンダー108のボンディングヘッド部10の移動機構の部分を示す図である。ボンディングヘッド部10の構成は図1のものと同様であるので、詳細な説明を省略する。ボンディングヘッド部10の左右にマグネット部140,142が配置され、その両外側にそれぞれコイル部150,152が配置される。図ではマグネット部140,142に隠れて現れていないが、各マグネット部140,142と回転体16との間は、図1、図2等で説明した複数の金属ベルトあるいは金属ワイヤにより連結される。この構造によりマグネット部140,142とコイル部150,152とを近接させることができ、駆動効率を向上させることができる。また、ボンディングヘッド部10における左右方向の位置精度の向上も図ることができる。なお、コイルからの発熱を効率よく放熱させるため、コアを用いて磁力を導き、コイルを放熱が容易な位置に配置するものとしてもよい。
In the embodiment of FIG. 1, the
上記において、回転体を所定の直進軸に沿って直進及び回転可能に駆動するアクチュエータ部分をボンディング装置に用いるものとして説明したが、このアクチュエータ部分をボンディング装置以外の移動装置や位置決め装置に用いるものとしてもよい。 In the above description, the actuator portion that drives the rotating body so as to be linearly movable and rotatable along a predetermined straight axis is used in the bonding apparatus. However, the actuator portion is used in a moving device and a positioning device other than the bonding device. Also good.
8,108 ワイヤボンダー、10 ボンディングヘッド部、12 ステージ、14 サイド案内部、16 回転体、18 ボンディングツール、20 カメラ、22,22a,22b,24,26,28,30,32,34,36 金属ベルト、40,42 (直進)駆動軸、50,52 リニアモータ、60 ボンディングツール先端軌跡、140,142 マグネット部、150,152 コイル部。 8,108 Wire bonder, 10 Bonding head, 12 Stage, 14 Side guide, 16 Rotating body, 18 Bonding tool, 20 Camera, 22, 22a, 22b, 24, 26, 28, 30, 32, 34, 36 Metal Belt, 40, 42 (straight) drive shaft, 50, 52 linear motor, 60 bonding tool tip locus, 140, 142 magnet part, 150, 152 coil part.
Claims (13)
回転体の両側に配置され直進軸に沿ってそれぞれ移動可能な1組の左右直進部材と、
1組の左右直進部材をそれぞれ駆動する駆動部と、
左右直進部材と回転体とを連結し、左右直進部材の組合せ運動を回転体に伝達する伝達部と、
を備えることを特徴とするアクチュエータ。 A rotating body that can move straight and rotate along a predetermined straight axis;
A set of left and right rectilinear members arranged on both sides of the rotating body and movable respectively along a rectilinear axis;
A drive unit for driving each of the pair of right and left rectilinear members;
A transmission unit that connects the left and right rectilinear member and the rotating body, and transmits the combined motion of the left and right rectilinear member to the rotating body;
An actuator comprising:
回転体の両側に配置され直進軸に沿ってそれぞれ移動可能な1組の左右直進部材と、
1組の左右直進部材をそれぞれ駆動する駆動部と、
左右直進部材と回転体とを連結し、左右直進部材の組合せ運動を回転体に伝達する伝達部と、
を備えることを特徴とするボンディング装置。 A rotating body that includes a bonding head for bonding to a bonding target, and that can move linearly and rotate along a predetermined linear axis;
A set of left and right rectilinear members arranged on both sides of the rotating body and movable respectively along a rectilinear axis;
A drive unit for driving each of the pair of right and left rectilinear members;
A transmission unit that connects the left and right rectilinear member and the rotating body, and transmits the combined motion of the left and right rectilinear member to the rotating body;
A bonding apparatus comprising:
伝達部は、
左移動部材の直進軸に沿った前方部と回転体の左側面とを接続する左前方接続部材と、
左移動部材の直進軸に沿った後方部と回転体の左側面とを接続する左後方接続部材と、
右移動部材の直進軸に沿った前方部と回転体の右側面とを接続する右前方接続部材と、
右移動部材の直進軸に沿った後方部と回転体の右側面とを接続する右後方接続部材と、
を含むことを特徴とするボンディング装置。 The bonding apparatus according to claim 2,
The transmission part
A left front connecting member that connects the front portion along the straight axis of the left moving member and the left side surface of the rotating body;
A left rear connecting member that connects the rear part along the straight axis of the left moving member and the left side surface of the rotating body;
A right front connecting member that connects the front portion along the straight axis of the right moving member and the right side surface of the rotating body;
A right rear connecting member that connects the rear part along the straight axis of the right moving member and the right side surface of the rotating body;
A bonding apparatus comprising:
伝達部は、回転体の側面に沿ってU字巻きされ、その中心部分が回転体に固定される1組の前方後方U字巻部材であって、各端部が左直進部材の直進軸に沿った前方部と右直進部材の直進軸に沿った前方部とにそれぞれ固定される前方U字巻部材と、各端部が左直進部材の直進軸に沿った後方部と右直進部材の直進軸に沿った後方部とにそれぞれ固定される後方U字巻部材とを含むことを特徴とするボンディング装置。 The bonding apparatus according to claim 2,
The transmission unit is a set of front and rear U-shaped winding members that are U-shaped along the side surface of the rotating body and whose central portion is fixed to the rotating body, and each end portion is a straight axis of the left rectilinear member. Forward U-shaped winding member fixed to the front part along the straight axis of the right rectilinear member and the front U-shaped winding member respectively fixed to the front part of the right rectilinear member A bonding apparatus comprising a rear U-shaped winding member fixed to a rear portion along the axis.
伝達部は、回転体の側面に沿ってアルファ巻きされ、その中心部分が回転体に固定される1組の左右アルファ巻部材であって、各端部が左直進部材の直進軸に沿った前方部と後方部とにそれぞれ固定される左アルファ巻部材と、各端部が右直進部材の直進軸に沿った前方部と後方部とにそれぞれ固定される右アルファ巻部材とを含むことを特徴とするボンディング装置。 The bonding apparatus according to claim 2,
The transmission portion is a set of left and right alpha winding members that are alpha-wrapped along the side surface of the rotating body and whose central portion is fixed to the rotating body, and each end portion is a front side along the rectilinear axis of the left rectilinear member A left alpha winding member fixed to each of the front and rear portions, and a right alpha winding member fixed to each of the front and rear portions along the straight axis of the right rectilinear member. Bonding equipment.
伝達部は、複数のベルトで構成されることを特徴とするボンディング装置。 The bonding apparatus according to any one of claims 3 to 5,
The transmission device is constituted by a plurality of belts.
伝達部は、複数のワイヤで構成されることを特徴とするボンディング装置。 The bonding apparatus according to any one of claims 3 to 5,
The transmission device is constituted by a plurality of wires.
回転体は、左右直進部材の組合せ運動の伝達を受ける両側部分の間の距離が回転体の回転によって変化しないことを特徴とするボンディング装置。 The bonding apparatus according to claim 2,
The bonding apparatus according to claim 1, wherein the distance between the two side portions that receive the combined movement of the right and left rectilinear members is not changed by the rotation of the rotating body.
回転体の両側部分の間の距離が回転により変化しない部分は、円形の一部であることを特徴とするボンディング装置。 The bonding apparatus according to claim 8, wherein
The bonding apparatus characterized in that a portion where the distance between both side portions of the rotating body does not change due to rotation is a circular part.
回転体の両側部分の間の距離が回転により変化しない部分は、図形回転軸を共通にして向かい合う2つの扇形状の一部であることを特徴とするボンディング装置。 The bonding apparatus according to claim 8, wherein
The bonding apparatus characterized in that a portion where the distance between both side portions of the rotating body does not change by rotation is a part of two fan shapes facing each other with a common figure rotation axis.
回転体は、左右直進部材により案内されることを特徴とするボンディング装置。 The bonding apparatus according to any one of claims 3 to 5,
A rotating device is guided by a left and right rectilinear member.
左右直進部材及び回転体の少なくとも一方は、流体圧支持機構により支持されることを特徴とするボンディング装置。 The bonding apparatus according to claim 1,
At least one of the left-right rectilinear member and the rotating body is supported by a fluid pressure support mechanism.
駆動部は、1組の左右リニアモータであることを特徴とするボンディング装置。
The bonding apparatus according to claim 2,
The driving unit is a pair of left and right linear motors.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004020434A JP2005218202A (en) | 2004-01-28 | 2004-01-28 | Actuator and bonding apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004020434A JP2005218202A (en) | 2004-01-28 | 2004-01-28 | Actuator and bonding apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005218202A true JP2005218202A (en) | 2005-08-11 |
| JP2005218202A5 JP2005218202A5 (en) | 2006-04-06 |
Family
ID=34904354
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004020434A Pending JP2005218202A (en) | 2004-01-28 | 2004-01-28 | Actuator and bonding apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005218202A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006036669A1 (en) * | 2004-09-22 | 2006-04-06 | Kulicke And Soffa Industries, Inc. | Motion control device for wire bonder bondhead |
| WO2019151340A1 (en) * | 2018-01-30 | 2019-08-08 | 株式会社新川 | Actuator and wire bonding device |
-
2004
- 2004-01-28 JP JP2004020434A patent/JP2005218202A/en active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006036669A1 (en) * | 2004-09-22 | 2006-04-06 | Kulicke And Soffa Industries, Inc. | Motion control device for wire bonder bondhead |
| WO2019151340A1 (en) * | 2018-01-30 | 2019-08-08 | 株式会社新川 | Actuator and wire bonding device |
| CN111656502A (en) * | 2018-01-30 | 2020-09-11 | 株式会社新川 | Actuator and wire bonding device |
| JPWO2019151340A1 (en) * | 2018-01-30 | 2021-01-07 | 株式会社新川 | Actuators and wire bonding equipment |
| JP7002148B2 (en) | 2018-01-30 | 2022-01-20 | 株式会社新川 | Actuators and wire bonding equipment |
| CN111656502B (en) * | 2018-01-30 | 2023-05-26 | 株式会社新川 | Actuator and wire bonding apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7898204B2 (en) | High-speed substrate manipulator | |
| JP4902612B2 (en) | Planar stage moving device of machinery | |
| US7265461B2 (en) | Actuator and bonding apparatus | |
| JP2009090457A (en) | Tool change device with direct drive reciprocating and pivoting actuator | |
| JP2004263825A (en) | Reaction force attenuation drive unit | |
| JP2005218202A (en) | Actuator and bonding apparatus | |
| JP4018057B2 (en) | Bonding equipment | |
| JP2010159842A (en) | Magnetic bearing | |
| US8256658B2 (en) | Wire bonding apparatus comprising rotary positioning stage | |
| JP3993157B2 (en) | Bonding equipment | |
| US6279490B1 (en) | Epicyclic stage | |
| JP4826149B2 (en) | Long-stroke movable alignment stage | |
| US7389805B2 (en) | Bonding arm swinging type bonding apparatus | |
| JP2005353839A (en) | Bonding equipment | |
| WO2016199660A1 (en) | Working machine | |
| JPH10303241A (en) | Wire bonder | |
| JP5141652B2 (en) | Linear rotary actuator | |
| JP2014046339A (en) | Friction stir welding apparatus having inclination angle adjusting mechanism | |
| JP4811780B2 (en) | Linear motor, machine tool and measuring instrument | |
| JP4204816B2 (en) | Table drive device | |
| JP2014069205A (en) | Support unit and friction stir welding device using the same | |
| JP2007240213A (en) | Rotational/bidirectional moving device, alignment unit, and alignment stage | |
| JP4777855B2 (en) | Reciprocating device | |
| JP2946007B2 (en) | Bonding equipment | |
| JP2005219148A (en) | Robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090324 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090714 |