JP2004231111A - 操舵装置 - Google Patents
操舵装置 Download PDFInfo
- Publication number
- JP2004231111A JP2004231111A JP2003024000A JP2003024000A JP2004231111A JP 2004231111 A JP2004231111 A JP 2004231111A JP 2003024000 A JP2003024000 A JP 2003024000A JP 2003024000 A JP2003024000 A JP 2003024000A JP 2004231111 A JP2004231111 A JP 2004231111A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- arm
- vehicle
- wheel
- steering device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
【課題】車両用操舵装置を提供することである。
【解決手段】本発明の車両用操舵装置は、左右2つの操舵輪を操作するための、車両用操舵装置であって、ハンドル操作に従って前記操舵輪間を変位されるようになった変位部材と、一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記各操舵輪に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上の角度となるように構成されたことを特徴とする。
【選択図】 図2
【解決手段】本発明の車両用操舵装置は、左右2つの操舵輪を操作するための、車両用操舵装置であって、ハンドル操作に従って前記操舵輪間を変位されるようになった変位部材と、一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記各操舵輪に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上の角度となるように構成されたことを特徴とする。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
本発明は、車両用操舵装置に関し、特に、フォークリフト用の操舵装置に関する。
【0002】
【従来の技術】
資材などの重量物を運搬する車両として所謂フォークリフトが知られている。フォークリフトは、主として、資材などが保管された倉庫内などで使用されるので、ときとして狭い通路を走行し、また、限られた通路幅内で旋回しなければならないことがある。
フォークリフトの旋回性能を向上させる目的のフォークリフトが特許文献1に開示されている。
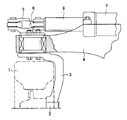
このフォークリフトの操舵機構では、操舵輪1のジャーナル2に回転アーム3の下端部が取り付けている。回転アーム3の上端部は、車体から操舵輪1の上方まで延びたメンバー4に、垂直軸線を中心に回転することができるように、取り付けられられている。回転アーム3の頂面部からは、第1アーム5がメンバー4を越えて上方、且つ、外方に突出している。第1アーム5の自由端部には第2アーム6の一方端部が回動自在に取り付けられ、第2アーム6の他方端部には、油圧シリンダ7から延びるピストンロッド8の先端部が回動自在に取り付けられている。
【特許文献1】
ドイツ特許 DE4025543 A1
【0003】
【発明が解決しようとする課題】
しかしながら、特許文献1に開示されたフォークリフトの操舵機構は、油圧シリンダ7、ピストンロッド8が操舵輪の上方に配置されるので、車軸上に広い空間を必要とし、このことは、フォークリフトの設計の自由度を狭める要因の1つになっていた。
従って、本発明は、上述した従来技術の問題点を解決するためになされたものであり、操舵輪の上方に広い空間を必要としない操舵装置を提供することを目的とする。
【0004】
【課題を解決するための手段】
上記目的を達成するため、本発明の操舵装置は、左右2つの操舵輪を操作するための、車両用操舵装置であって、ハンドル操作に従って前記操舵輪間を変位されるようになった変位部材と、一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記各操舵輪に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度の角度になるように構成されたことを特徴とする。
【0005】
上記構成の操舵装置によれば、操舵装置が操舵輪の間に配置されるので、従来技術のように操舵輪の上方に広い空間を必要としない。
また、本発明においては、前記第1アーム、第2アームの寸法形状、配置位置、前記第1ピン、第2ピン、静止ピンの配置位置が、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上の角度となるように、決定されるのが好ましい。
【0006】
更に、本発明においては、前記変位部材が、前記車両のハンドル操作に従って作動されるパワーシリンダ機構のピストンロッドによって構成され、前記パワーシリンダ機構は、前記車体に固定された1つの油圧シリンダと、両端部が前記油圧シリンダから突出するように前記油圧シリンダに摺動自在に取り付けられた1つの前記ピストンロッドとを有し、該ピストンロッドの各端部に前記第1アームの前記一方の端部が取り付けられるのが好ましい。
【0007】
更にまた、本発明においては、前記変位部材が、前記車両のハンドル操作に従って作動されるパワーシリンダ機構のピストンロッドによって構成され、前記パワーシリンダ機構は、2つの油圧シリンダと、一方の端部のみが前記各油圧シリンダから突出するように前記各油圧シリンダに摺動自在に取り付けられた前記ピストンロッドとを有し、該各ピストンロッドの前記一方の端部に前記第1アームの前記一方の端部が取り付けられ、前記各油圧シリンダの、前記ピストンロッドの前記一方の端部が突出する端部と反対側に位置する端部が、固定ピンによって前記車体に回動自在に取り付けられているのが好ましい。
【0008】
また、本発明においては、前記変位部材がピニオン/ラック機構のラック部材によって構成され、前記ピニオン/ラック機構は、前記車両のハンドル操作に従って作動されるモータと、該モータに連結されたピニオンと、該ピニオンと係合し、前記ピニオンの回転により変位する前記ラック部材とを有し、該ラック部材の各端部に前記第1アームの前記一方の端部が取り付けられているのが好ましい。
【0009】
上記目的を達成するため、本発明の操舵装置はまた、夫々が左右2つの操舵輪を有する前後の操舵輪を操作するための、車両用操舵装置であって、該車両用操舵装置が、前輪用操舵装置と、後輪用操舵装置とを有し、これらの操舵装置の各々が、ハンドル操作に従って前記左右の操舵輪間を変位されるようになった変位部材と、一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記左右の操舵輪の各々に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上の角度となるように構成されたことを特徴とする。
【0010】
上記構成の操舵装置によれば、操舵装置が操舵輪の間に配置されるので、従来技術のように操舵輪の上方に広い空間を必要としない。
この発明では、前記前輪用操舵装置と後輪用操舵装置とは、前記ハンドル操作に従って同期して作動するように、構成されるのが好ましい。
【0011】
【発明の実施の形態】
以下、添付図面を参照して本発明の実施形態について説明する。実施形態はすべて、本発明をフォークリフトの操舵装置に適用したものである。
図1及び図2を参照すると、第1実施形態の操舵装置が概略的に示されている。
【0012】
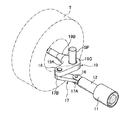
全体的に参照番号10で示される操舵装置は、後輪用のものであり、所謂パワーシリンダ機構を有する。このパワーシリンダ機構は、車体の一部(図示せず)に固定された油圧シリンダ11と、この油圧シリンダに摺動自在に取り付けられた、変位部材、すなわち、1つのピストンロッド12とを有する。ピストンロッド12にはシリンダ11内においてピストン13(図2)が取り付けられ、ピストン13はシリンダ11を2つの室14、15に区画する。ピストンロッド12の各端部はシリンダ11の各端部から外方に突出している。
【0013】
このパワーシリンダ機構それ自体は、在来の機構であり、ハンドル操作に従って、シリンダ11の2つの室14、15のうちの一方に作動油(油圧)が供給され、ピストン13が他方の室に向けて変位され、他方の室の作動油はタンク等に戻されるようになっている。
シリンダ11から外方に突出しているピストンロッド12の各自由端部には、第1ピン16を介して第1アーム17の第1端部17Aが回動自在に取り付けられている。
【0014】
この第1アーム17の第2端部17Bには、第2ピン18を介して第2アーム19の第1端部19Aが回動自在に取り付けられている。第2アーム19は、アングル部材又は角度付きアームであり、第2端部19Bと、第1端部19Aと第2端部19Bとの間に位置する中間部19Cとを有する。この実施形態では、第2アーム19を1つのアームで構成したけれども、2つのアームを互いに対して角度をなして固定することによって構成しても良い。
第2端部19Bは操舵輪Tに取り付けられ、中間部19Cは、静止ピン、この実施形態では、車体の一部(図示せず)に固定された第3ピンSPに回動自在に取り付けられている。
【0015】
上記構造の操舵装置10の作動を、フォークリフトの操作者がハンドルを左に切った場合を例にして説明する。
ハンドルが左に切られると、作動油(油圧)がシリンダ11の室15に供給され、これによりピストン13が室14に向けて変位され、室14の作動油はタンク等に戻される。一方、ピストン13が室14に向けて変位されることによって、ピストンロッド12は、図2で見たとき、左端部がシリンダ11から突出し、右端部がシリンダ11に引っ込む。
【0016】
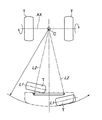
図2bで良く分かるように、ピストンロッド12の左端部がシリンダ11から突出すると、このピストンロッド12の左端部に取り付けられた第1ピン16はシリンダ11から遠ざかるように変位される。他方、第1アーム17は、第1端部17Aが(変位された)第1ピン16に(回動自在に)取り付けられているけれども、第2端部17Bが、静止ピンである第3ピンSPに取り付けられた第2アーム19の第1端部19Aに取り付けられているため、シリンダ11から遠ざかるように変位される量は僅かである。この第1アーム17を介してピストンロッド12から第2アーム19に伝えられた力は、第3ピンSPを中心に第2アーム19を図2で見たときに時計方向に回動させ、この結果、第2アーム19に取り付けられた操舵輪Tは、その前後方向中心軸線L1が図2aに示される直進時の前後方向中心軸線Lに対して90度以上の角度αを構成する位置まで、変位される、すなわち、操舵されることになる。換言すると、フォークリフトが、例えば左旋回しているときの左側操舵輪、すなわち、旋回内側操舵輪の直進時からの移動角度、すなわち、旋回内側操舵輪の切れ角(舵角)は90度以上である。
【0017】
同様に、ピストンロッド12の右端部がシリンダ11に引っ込められると、このピストンロッド12の右端部に取り付けられた第1ピン16はシリンダ11に向けて変位され、第2アーム19は第1アーム17を介して第3ピンSPを中心に図2で見たときに時計方向に回動され、第2アーム19に取り付けられた操舵右輪Tは、その前後方向中心軸線L1が図2aに示される直進時の前後方向中心軸線Lに対して90度以上の角度αを構成する位置まで、操舵されることになる。本実施形態では、この操舵右輪T、すなわち、旋回外側操舵輪は、切れ角の観点では、90度に達していない。
【0018】
第1アーム17、第2アーム19の寸法形状、配置位置、並びに、第1ピン16、第2ピン18、第3ピンSPの配置位置は、フォークリフトのハンドルを左右に限界まで操作したときに、各操舵輪Tの前後方向中心軸線L1が直進時の前後方向中心軸線Lに対して90度以上の角度αを構成するように、決定され、図3に示すように、フォークリフトのハンドルが左右に限界まで操作されたときの操舵輪Tの前後方向中心軸線L1に対して垂直な操舵輪Tの横方向中心軸線L2が、前輪の車軸AXの中心点Cを通って延びるように決定されるのが好ましい。
【0019】
上記構造の操舵装置10は、操舵輪T間に配置されるので、操舵輪T間に構成される空間を有効に利用することができ、操舵輪の上方に操舵機構用の広い空間を必要としない。
【0020】
次に、図4を参照して本発明の第2実施形態の操舵装置を説明する。
全体的に参照番号20で示される第2実施形態の操舵装置は、第1実施形態の操舵装置10のパワーシリンダ機構が両操舵輪に対して1つの油圧シリンダ11と、該油圧シリンダに摺動自在に取り付けられた1つのピストンロッド12とを採用していたのに対して、各操舵輪の夫々に対して、1つの油圧シリンダと、1つのピストンロッドとを採用している点で異なる。その他の構造は、第2実施形態の操舵装置と第1実施形態の操舵装置10とでほぼ共通であるので、共通する構造についての第2実施形態の操舵装置の説明はここでは省略し、また、第1実施形態の操舵装置10の要素と共通する第2実施形態の操舵装置の要素には、第1実施形態の操舵装置10の要素に使用したのと同じ参照番号を使用する。
【0021】
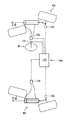
操舵装置20のパワーシリンダ機構は、各操舵輪Tに対して1つの油圧シリンダ21、すなわち、計2つの油圧シリンダ21、21’を備える。
各油圧シリンダ21、21’の内方端部21Aは、固定ピンPによって車体の一部(図示せず)に回動自在に取り付けられている。各油圧シリンダ21の外方端部21Bからは、第1実施形態の操舵装置10におけるピストンロッド12と同様に、変位部材を構成するピストンロッド22が外方に突出し、その先端部には第1ピン16を介して第1アーム17が回動自在に取り付けられる。すなわち、この実施形態では、各ピストンロッド22は、油圧シリンダ21の外方端部21Bからのみ突出し、内方端部21Aからは突出せず、各ピストンロッド22の内方端部にはピストンが取り付けられている。
【0022】
第1ピン16、第1アーム17から操舵輪Tまでの構造は、第1実施形態の操舵装置10の構造と同様である。
第1ピン16間にはタイロッドTRが延び、タイロッドTRの各端部は各第1ピン16に回動自在に取り付けられている。
【0023】
この操舵装置20の作動を、フォークリフトの操作者がハンドルを左に切った場合を例にして説明する。
ハンドルが左に切られると、操舵左輪用のシリンダ21の室15に作動油(油圧)が供給され、これによりピストン13が室14に向けて変位され(図4b参照)、室14の作動油はタンク等に戻される。ピストン13が室14に向けて変位されることによって、ピストンロッド22は、図4bに示すように、左端部がシリンダ21から突出し、第1ピン16をシリンダ21から遠ざけるように変位させる。第1ピン16を変位させる際にピストンロッド22がモーメントを受けると、シリンダ21は固定ピンPを中心に図4で見たとき反時計方向に回動するので、ピストンロッド22が実際に受けるモーメントを(第1実施形態のピストンロッド12が受けるモーメントと比較して)減ずることができる。従って、ピストンロッド22を細くすること、ひいては、パワーシリンダ機構を全体的にコンパクト化することが可能になる。また、各シリンダ21、21’は、その長手方向軸線がフォークリフトのハンドルを左右に限界まで操作したときに取る各操舵輪Tの前後方向中心軸線L1とほぼ平行になるように、配置されているので、シリンダ21、21’と操舵輪Tとの干渉を低減することができ、ひいては、操舵装置20の設計の自由度を向上させることができる。
【0024】
ハンドルが左に切られたときにはまた、操舵右輪用のシリンダ21’の室14’にも作動油が供給され、ピストンロッド22はシリンダ21内に引っ込められる。ピストンロッド22が引っ込む際には、シリンダ21は固定ピンPを中心に図4で見たとき反時計方向に回動し、これによりピストンロッド22が受けるモーメントを減ずることができるのは、前述した操舵左輪におけるのと同じである。
尚、各ピストンロッド22はタイロッドTRによって連結されているので、一方のピストンロッド22の突出量と、他方のピストンロッド22の引っ込み量と左右方向成分を同じにすることができる。
【0025】
続いて、図5を参照して本発明の第3実施形態の操舵装置を説明する。
全体的に参照番号30で示される第3実施形態の操舵装置は、第1実施形態の操舵装置10のパワーシリンダ機構に代えて、ピニオン/ラック機構を採用している点で、操舵装置10と異なる。その他の構造は、第3実施形態の操舵装置30と、第1実施形態の操舵装置10とでほぼ共通であるので、共通する構造についての第3実施形態の操舵装置30の説明はここでは省略し、また、第1実施形態の操舵装置10の要素と共通する第3実施形態の操舵装置30の要素には、第1実施形態の操舵装置10の要素に使用したのと同じ参照番号を使用する。
【0026】
操舵装置30のピニオン/ラック機構は、フォークリフトの操作者がハンドルを操作した(ハンドルを切った)方向、その操作量に応答して、所定方向に、所定量回転するようになったモータMと、減速機(図示せず)を介してモータMに連結されたピニオンPOと、このピニオンPOと係合し、ピニオンPOの回転により変位する変位部材、すなわち、ラック部材Rとを有する。
ラック部材Rの各端部には第1ピン16を介して第1アーム17が回動自在に取り付けられる。第1ピン16、第1アーム17から操舵輪Tまでの構造は、第1実施形態の操舵装置10の構造と同様である。
【0027】
この操舵装置30の作動を、フォークリフトの操作者がハンドルを左に切った場合を例にして説明する。
ハンドルが左に切られると、モータMが回転され、この回転が減速機を介してピニオンPを図5で見たときに反時計方向に回転させる。すると、ピニオンPOに係合されたラック部材Rは、図5bに示すように、図5で見たときに左に移動され、この結果、操舵左輪Tの第1ピン16は外方に移動され、操舵右輪Tの第1ピン16は内方に移動され、ついには、操舵輪Tは夫々、その前後方向中心軸線L1が図5aに示される直進時の前後方向中心軸線Lに対して90度以上の角度αを構成する位置まで操舵されることになる。すなわち、旋回内側操舵輪の切れ角は90度以上である。
【0028】
ところで、上記実施形態はいずれも、本発明の操舵装置を後輪に適用したものであったけれども、以下説明するように、本発明の操舵装置は前輪、後輪の両方に適用することもできる。これらの例を図6乃至図8に示す。
図6は、図1及び図2を参照して説明した操舵装置と同一の構造の操舵装置を前輪に備え、この前輪用操舵装置にリンク機構を介して後輪用操舵装置を同期させるようになったフォークリフトの実施形態を示す。
【0029】
従って、ここでは、前輪用操舵装置40の各要素には、図1及び図2に示した操舵装置の対応する要素に使用された参照番号を使用し、前輪用操舵装置40の構造、作動に関する説明は繰り返し行わない。尚、この前輪用操舵装置40においても、旋回内側操舵輪の切れ角が90度以上になるように構成されているが、図6で分かるように、後輪は、操舵時、図1及び図2に示した操舵装置における後輪と全く同じ向き、切れ角であるのに対して、前輪は、操舵時、図1及び図2に示した操舵装置における後輪とは向きに関しては逆となる。すなわち、フォークリフトにおける各側の前後操舵輪は、操舵時、逆相位となるように配置、構成されている。
【0030】
後輪用操舵装置50もまた前輪用操舵装置の構造とほぼ同様な構造を有する。従って、後輪用操舵装置50の各要素には、図1及び図2に示した操舵装置の対応する要素に使用された参照番号を使用し、対応する構造、作動に関する説明は繰り返し行わない。
後輪用操舵装置50は、油圧シリンダ11、ピストンロッド12を備えず、左右の第1アーム17の第1端部17A同士が第1ピン16を介してタイロッド51(左右の操舵輪間を変位されるようになった変位部材)によって互いに連結されている点で、前輪用操舵装置40や、図1及び図2に示した操舵装置10と相違する。
【0031】
この実施形態では、前輪用操舵装置40の左前輪の第1端部17Aと後輪用操舵装置50の左後輪の第1端部17Aとが、リンク機構60を介して連結されている。
リンク機構60は、一方の端部61Aが前輪用操舵装置40の左前輪の(上下いずれかの方向に延長された)第1ピン16に枢着された第1ロッド61を有する。
【0032】
リンク機構60はまた第1L字形部材62を有し、この第1L字形部材62は、自由端が第1ロッド61の他方の端部61Bに枢着された長第1アーム62Aと、この長第1アーム62Aに対して角度がつけられている短第2アーム62Bとを有し、アーム62A、62Bの接合部付近で、フォークリフトの一部に固定された静止ピン、すなわち、第1回動ピン63によって回動自在に支持されている。
リンク機構60は、後輪用操舵装置50に関連して、前輪用操舵装置40と同様に、一方の端部64Aが後輪用操舵装置50の左後輪の(上下いずれかの方向に延長された)第1ピン16に枢着された第2ロッド64を有する。
【0033】
リンク機構60は更に第2L字形部材65を有し、この第2L字形部材65は、自由端が第2ロッド64の他方の端部64Bに枢着された長第1アーム65Aと、長第1アーム65Aに対して角度がつけられている短第2アーム65Bとを有し、アーム65A、65Bの接合部付近で、フォークリフトの一部に固定された静止ピン、すなわち、第2回動ピン66によって回動自在に支持されている。
リンク機構60ははまたコネクティングロッド67を有し、コネクティングロッド67の前端は第1L字形部材62の短第2アーム62Bの自由端に、コネクティングロッド67の後端は第2L字形部材65の短第2アーム65Bの自由端に、夫々、枢着されている。
【0034】
従って、ハンドルWが左に切られると、図1及び図2に示した操舵装置10におけるのと同様の原理によって、前輪用操舵装置40のピストンロッド12が図6で見て左に突出し、前輪がフォークリフトを左旋回させるように切られるが、その際、前輪用操舵装置40の左前輪の(上下いずかの方向に延長された)第1ピン16に枢着された第1ロッド61もまた、ピストンロッド12に引っ張られることになる。すると、長第1アーム62Aが第1ロッド61に連結された第1L字形部材62は、第1回動ピン63を中心に、図6で見たとき反時計方向に回動される。
【0035】
かかる第1L字形部材62の回動により、これにコネクティングロッド67を介して連結された第2L字形部材65は、第2回動ピン66を中心に、図6で見たとき時計方向に回動される。その結果、第2回動ピン66の長第1アーム66Aに連結された第2ロッド64は、図1及び図2に示した操舵装置のピストンロッド12が左に向って突出したときと同様に、左後輪の第1アーム17を図6で見た時、左に移動させ、また、タイロッド51で左後輪の第1アーム17に連結された右後輪の第1アーム17を左に移動させる。これにより、図1及び図2に示した操舵装置10におけるのと同様の原理によって、後輪がフォークリフトを左旋回させるように切られる。
【0036】
かくして、前輪用操舵装置と後輪用操舵装置は、ハンドル操作に従って同期して作動する。
尚、車輪又はタイヤのスリップを理論上なくす乃至少なくする観点からは、フォークリフトの旋回時、前後左右の車輪の法線の交点がフォークリフトの中心乃至中心付近で交わるように、前輪用操舵装置、後輪用操舵装置を設計する(これら各装置の各要素の寸法等を選択、決定する)のが好ましい。
【0037】
図7に示す実施形態のフォークリフトは、図6に示す前輪用操舵装置40と同一構造の前輪用操舵装置40と、ハンドルWにより直接操舵されるのではないことを除き、図1及び図2に示した後輪用操舵装置10と同一構造の後輪用操舵装置10と、前輪用操舵装置40の作動に応じて後輪用操舵装置10を作動させるための電気油圧制御装置70とを有する。
【0038】
電気油圧制御装置70は、ハンドルWに取り付けられた、ハンドルWの操舵角を検出するための操舵角センサ71と、コントローラ72と、後輪用操舵装置10のパワーシリンダ機構を作動させるための油圧システム73とを有する。
コントローラ72は、ハンドルWが操作されて前輪用操舵装置40が作動する際には、操舵角センサ71からハンドルWの操舵角に関する信号を受信し、前輪の操舵角に対応して前輪と逆位相に後輪を操舵するように後輪用操舵装置10のパワーシリンダ機構を作動させるための信号を油圧システム73に送信するようになっている。
【0039】
後輪用操舵装置10はハンドルWによって直接機械的に操作されるようになっていないため、この実施形態では、電気油圧制御装置70は、コントローラ72に接続された、後輪の切れ角を検出するための舵角センサ74を有する。しかして、コントローラ72は、ハンドルWの操舵角、すなわち、前輪の舵角と後輪の舵角とが対応していないことが舵角センサ74からの信号によって判明したときには、前輪の舵角との相違をなくすように後輪を操舵するための補正信号を油圧システム73に送信するようになっている。
【0040】
最後に、図8に示す実施形態のフォークリフトは、図7に示す後輪用操舵装置10と同一構造の前輪用操舵装置80、後輪用操舵装置90と、ハンドルWの操作に応じて前輪用操舵装置80と、後輪用操舵装置90を作動させるための電気油圧制御装置100とを有する。
電気油圧制御装置100は、ハンドルWに取り付けられた、ハンドルWの操舵角を検出するための操舵角センサ101と、コントローラ102と、前輪用操舵装置80のパワーシリンダ機構を作動させるための油圧システム103と、後輪用操舵装置90のパワーシリンダ機構を作動させるための油圧システム104とを有する。
【0041】
コントローラ102は、ハンドルWが操作されると、操舵角センサ101からハンドルWの操舵角に関する信号を受信し、ハンドルWの操舵角に対応して前輪と後輪とを逆位相に操舵するように、前輪用操舵装置80のパワーシリンダ機構を作動させるための信号を油圧システム103に、また、後輪用操舵装置90のパワーシリンダ機構を作動させるための信号を油圧システム104に送信するようになっている。
【0042】
前輪用操舵装置80、後輪用操舵装置90共に、ハンドルWによって直接機械的に操作されるようになっていないため、この実施形態では、電気油圧制御装置100は、夫々、コントローラ102に接続された、前輪の切れ角を検出するための舵角センサ105と、後輪の切れ角を検出するための舵角センサ106とを有する。
【0043】
しかして、コントローラ102は、ハンドルWの操舵角と、前輪の舵角、及び/又は、後輪の舵角とが対応していないことが舵角センサ105、及び/又は、106からの信号によって判明したときには、ハンドルWの操舵角とのズレ(不対応)をなくすように、前輪、後輪を操舵するための補正信号を、夫々、油圧システム103、104に送信するようになっている。
【0044】
本発明は、上述した実施形態に限定されることなく、種々の変更が可能である。
例えば、後輪を操舵輪とする上記実施形態においては、前輪の夫々に可逆回転可能なモータを設けて、旋回時、旋回方向に応じて、前右輪と前左輪とを逆回転させることによって車両旋回半径を短くすることができるようにしても良い。かかるモータは、バッテリ式フォークリフトにおいては電動モータが、また、エンジン式フォークリフトにおいては油圧モータが好ましい。
【0045】
【発明の効果】
以上のとおり、本発明は、操舵輪の上方に広い空間を必要としない操舵装置を提供することができる。
【図面の簡単な説明】
【図1】本発明の一実施形態における操舵装置の部分拡大概略斜視図である。
【図2】図2aは、操舵輪が直進状態にある図1の操舵装置の概略図であり、図2bは、操舵輪が左旋回状態にある図1の操舵装置の概略図である。
【図3】図1の操舵装置を採用したフォークリフトの概略図である。
【図4】図4aは、操舵輪が直進状態にある第2実施形態の操舵装置の概略図であり、図4bは、操舵輪が左旋回状態にある第2実施形態の操舵装置の概略図である。
【図5】図5aは、操舵輪が直進状態にある第3実施形態の操舵装置の概略図であり、図5bは、操舵輪が左旋回状態にある第3実施形態の操舵装置の概略図である。
【図6】本発明の操舵装置を前後輪に採用したフォークリフトの概略図である。
【図7】本発明の操舵装置を前後輪に採用したフォークリフトの概略図である。
【図8】本発明の操舵装置を前後輪に採用したフォークリフトの概略図である。
【図9】従来の操舵装置の部分断面図である。
【符号の説明】
T 操舵輪
10 操舵装置
12 変位部材(ピストンロッド)
17 第1アーム
19 第2アーム
19C 中間部
【発明の属する技術分野】
本発明は、車両用操舵装置に関し、特に、フォークリフト用の操舵装置に関する。
【0002】
【従来の技術】
資材などの重量物を運搬する車両として所謂フォークリフトが知られている。フォークリフトは、主として、資材などが保管された倉庫内などで使用されるので、ときとして狭い通路を走行し、また、限られた通路幅内で旋回しなければならないことがある。
フォークリフトの旋回性能を向上させる目的のフォークリフトが特許文献1に開示されている。
このフォークリフトの操舵機構では、操舵輪1のジャーナル2に回転アーム3の下端部が取り付けている。回転アーム3の上端部は、車体から操舵輪1の上方まで延びたメンバー4に、垂直軸線を中心に回転することができるように、取り付けられられている。回転アーム3の頂面部からは、第1アーム5がメンバー4を越えて上方、且つ、外方に突出している。第1アーム5の自由端部には第2アーム6の一方端部が回動自在に取り付けられ、第2アーム6の他方端部には、油圧シリンダ7から延びるピストンロッド8の先端部が回動自在に取り付けられている。
【特許文献1】
ドイツ特許 DE4025543 A1
【0003】
【発明が解決しようとする課題】
しかしながら、特許文献1に開示されたフォークリフトの操舵機構は、油圧シリンダ7、ピストンロッド8が操舵輪の上方に配置されるので、車軸上に広い空間を必要とし、このことは、フォークリフトの設計の自由度を狭める要因の1つになっていた。
従って、本発明は、上述した従来技術の問題点を解決するためになされたものであり、操舵輪の上方に広い空間を必要としない操舵装置を提供することを目的とする。
【0004】
【課題を解決するための手段】
上記目的を達成するため、本発明の操舵装置は、左右2つの操舵輪を操作するための、車両用操舵装置であって、ハンドル操作に従って前記操舵輪間を変位されるようになった変位部材と、一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記各操舵輪に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度の角度になるように構成されたことを特徴とする。
【0005】
上記構成の操舵装置によれば、操舵装置が操舵輪の間に配置されるので、従来技術のように操舵輪の上方に広い空間を必要としない。
また、本発明においては、前記第1アーム、第2アームの寸法形状、配置位置、前記第1ピン、第2ピン、静止ピンの配置位置が、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上の角度となるように、決定されるのが好ましい。
【0006】
更に、本発明においては、前記変位部材が、前記車両のハンドル操作に従って作動されるパワーシリンダ機構のピストンロッドによって構成され、前記パワーシリンダ機構は、前記車体に固定された1つの油圧シリンダと、両端部が前記油圧シリンダから突出するように前記油圧シリンダに摺動自在に取り付けられた1つの前記ピストンロッドとを有し、該ピストンロッドの各端部に前記第1アームの前記一方の端部が取り付けられるのが好ましい。
【0007】
更にまた、本発明においては、前記変位部材が、前記車両のハンドル操作に従って作動されるパワーシリンダ機構のピストンロッドによって構成され、前記パワーシリンダ機構は、2つの油圧シリンダと、一方の端部のみが前記各油圧シリンダから突出するように前記各油圧シリンダに摺動自在に取り付けられた前記ピストンロッドとを有し、該各ピストンロッドの前記一方の端部に前記第1アームの前記一方の端部が取り付けられ、前記各油圧シリンダの、前記ピストンロッドの前記一方の端部が突出する端部と反対側に位置する端部が、固定ピンによって前記車体に回動自在に取り付けられているのが好ましい。
【0008】
また、本発明においては、前記変位部材がピニオン/ラック機構のラック部材によって構成され、前記ピニオン/ラック機構は、前記車両のハンドル操作に従って作動されるモータと、該モータに連結されたピニオンと、該ピニオンと係合し、前記ピニオンの回転により変位する前記ラック部材とを有し、該ラック部材の各端部に前記第1アームの前記一方の端部が取り付けられているのが好ましい。
【0009】
上記目的を達成するため、本発明の操舵装置はまた、夫々が左右2つの操舵輪を有する前後の操舵輪を操作するための、車両用操舵装置であって、該車両用操舵装置が、前輪用操舵装置と、後輪用操舵装置とを有し、これらの操舵装置の各々が、ハンドル操作に従って前記左右の操舵輪間を変位されるようになった変位部材と、一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記左右の操舵輪の各々に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、前記車両のハンドルを左右のいずれかに限界まで操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上の角度となるように構成されたことを特徴とする。
【0010】
上記構成の操舵装置によれば、操舵装置が操舵輪の間に配置されるので、従来技術のように操舵輪の上方に広い空間を必要としない。
この発明では、前記前輪用操舵装置と後輪用操舵装置とは、前記ハンドル操作に従って同期して作動するように、構成されるのが好ましい。
【0011】
【発明の実施の形態】
以下、添付図面を参照して本発明の実施形態について説明する。実施形態はすべて、本発明をフォークリフトの操舵装置に適用したものである。
図1及び図2を参照すると、第1実施形態の操舵装置が概略的に示されている。
【0012】
全体的に参照番号10で示される操舵装置は、後輪用のものであり、所謂パワーシリンダ機構を有する。このパワーシリンダ機構は、車体の一部(図示せず)に固定された油圧シリンダ11と、この油圧シリンダに摺動自在に取り付けられた、変位部材、すなわち、1つのピストンロッド12とを有する。ピストンロッド12にはシリンダ11内においてピストン13(図2)が取り付けられ、ピストン13はシリンダ11を2つの室14、15に区画する。ピストンロッド12の各端部はシリンダ11の各端部から外方に突出している。
【0013】
このパワーシリンダ機構それ自体は、在来の機構であり、ハンドル操作に従って、シリンダ11の2つの室14、15のうちの一方に作動油(油圧)が供給され、ピストン13が他方の室に向けて変位され、他方の室の作動油はタンク等に戻されるようになっている。
シリンダ11から外方に突出しているピストンロッド12の各自由端部には、第1ピン16を介して第1アーム17の第1端部17Aが回動自在に取り付けられている。
【0014】
この第1アーム17の第2端部17Bには、第2ピン18を介して第2アーム19の第1端部19Aが回動自在に取り付けられている。第2アーム19は、アングル部材又は角度付きアームであり、第2端部19Bと、第1端部19Aと第2端部19Bとの間に位置する中間部19Cとを有する。この実施形態では、第2アーム19を1つのアームで構成したけれども、2つのアームを互いに対して角度をなして固定することによって構成しても良い。
第2端部19Bは操舵輪Tに取り付けられ、中間部19Cは、静止ピン、この実施形態では、車体の一部(図示せず)に固定された第3ピンSPに回動自在に取り付けられている。
【0015】
上記構造の操舵装置10の作動を、フォークリフトの操作者がハンドルを左に切った場合を例にして説明する。
ハンドルが左に切られると、作動油(油圧)がシリンダ11の室15に供給され、これによりピストン13が室14に向けて変位され、室14の作動油はタンク等に戻される。一方、ピストン13が室14に向けて変位されることによって、ピストンロッド12は、図2で見たとき、左端部がシリンダ11から突出し、右端部がシリンダ11に引っ込む。
【0016】
図2bで良く分かるように、ピストンロッド12の左端部がシリンダ11から突出すると、このピストンロッド12の左端部に取り付けられた第1ピン16はシリンダ11から遠ざかるように変位される。他方、第1アーム17は、第1端部17Aが(変位された)第1ピン16に(回動自在に)取り付けられているけれども、第2端部17Bが、静止ピンである第3ピンSPに取り付けられた第2アーム19の第1端部19Aに取り付けられているため、シリンダ11から遠ざかるように変位される量は僅かである。この第1アーム17を介してピストンロッド12から第2アーム19に伝えられた力は、第3ピンSPを中心に第2アーム19を図2で見たときに時計方向に回動させ、この結果、第2アーム19に取り付けられた操舵輪Tは、その前後方向中心軸線L1が図2aに示される直進時の前後方向中心軸線Lに対して90度以上の角度αを構成する位置まで、変位される、すなわち、操舵されることになる。換言すると、フォークリフトが、例えば左旋回しているときの左側操舵輪、すなわち、旋回内側操舵輪の直進時からの移動角度、すなわち、旋回内側操舵輪の切れ角(舵角)は90度以上である。
【0017】
同様に、ピストンロッド12の右端部がシリンダ11に引っ込められると、このピストンロッド12の右端部に取り付けられた第1ピン16はシリンダ11に向けて変位され、第2アーム19は第1アーム17を介して第3ピンSPを中心に図2で見たときに時計方向に回動され、第2アーム19に取り付けられた操舵右輪Tは、その前後方向中心軸線L1が図2aに示される直進時の前後方向中心軸線Lに対して90度以上の角度αを構成する位置まで、操舵されることになる。本実施形態では、この操舵右輪T、すなわち、旋回外側操舵輪は、切れ角の観点では、90度に達していない。
【0018】
第1アーム17、第2アーム19の寸法形状、配置位置、並びに、第1ピン16、第2ピン18、第3ピンSPの配置位置は、フォークリフトのハンドルを左右に限界まで操作したときに、各操舵輪Tの前後方向中心軸線L1が直進時の前後方向中心軸線Lに対して90度以上の角度αを構成するように、決定され、図3に示すように、フォークリフトのハンドルが左右に限界まで操作されたときの操舵輪Tの前後方向中心軸線L1に対して垂直な操舵輪Tの横方向中心軸線L2が、前輪の車軸AXの中心点Cを通って延びるように決定されるのが好ましい。
【0019】
上記構造の操舵装置10は、操舵輪T間に配置されるので、操舵輪T間に構成される空間を有効に利用することができ、操舵輪の上方に操舵機構用の広い空間を必要としない。
【0020】
次に、図4を参照して本発明の第2実施形態の操舵装置を説明する。
全体的に参照番号20で示される第2実施形態の操舵装置は、第1実施形態の操舵装置10のパワーシリンダ機構が両操舵輪に対して1つの油圧シリンダ11と、該油圧シリンダに摺動自在に取り付けられた1つのピストンロッド12とを採用していたのに対して、各操舵輪の夫々に対して、1つの油圧シリンダと、1つのピストンロッドとを採用している点で異なる。その他の構造は、第2実施形態の操舵装置と第1実施形態の操舵装置10とでほぼ共通であるので、共通する構造についての第2実施形態の操舵装置の説明はここでは省略し、また、第1実施形態の操舵装置10の要素と共通する第2実施形態の操舵装置の要素には、第1実施形態の操舵装置10の要素に使用したのと同じ参照番号を使用する。
【0021】
操舵装置20のパワーシリンダ機構は、各操舵輪Tに対して1つの油圧シリンダ21、すなわち、計2つの油圧シリンダ21、21’を備える。
各油圧シリンダ21、21’の内方端部21Aは、固定ピンPによって車体の一部(図示せず)に回動自在に取り付けられている。各油圧シリンダ21の外方端部21Bからは、第1実施形態の操舵装置10におけるピストンロッド12と同様に、変位部材を構成するピストンロッド22が外方に突出し、その先端部には第1ピン16を介して第1アーム17が回動自在に取り付けられる。すなわち、この実施形態では、各ピストンロッド22は、油圧シリンダ21の外方端部21Bからのみ突出し、内方端部21Aからは突出せず、各ピストンロッド22の内方端部にはピストンが取り付けられている。
【0022】
第1ピン16、第1アーム17から操舵輪Tまでの構造は、第1実施形態の操舵装置10の構造と同様である。
第1ピン16間にはタイロッドTRが延び、タイロッドTRの各端部は各第1ピン16に回動自在に取り付けられている。
【0023】
この操舵装置20の作動を、フォークリフトの操作者がハンドルを左に切った場合を例にして説明する。
ハンドルが左に切られると、操舵左輪用のシリンダ21の室15に作動油(油圧)が供給され、これによりピストン13が室14に向けて変位され(図4b参照)、室14の作動油はタンク等に戻される。ピストン13が室14に向けて変位されることによって、ピストンロッド22は、図4bに示すように、左端部がシリンダ21から突出し、第1ピン16をシリンダ21から遠ざけるように変位させる。第1ピン16を変位させる際にピストンロッド22がモーメントを受けると、シリンダ21は固定ピンPを中心に図4で見たとき反時計方向に回動するので、ピストンロッド22が実際に受けるモーメントを(第1実施形態のピストンロッド12が受けるモーメントと比較して)減ずることができる。従って、ピストンロッド22を細くすること、ひいては、パワーシリンダ機構を全体的にコンパクト化することが可能になる。また、各シリンダ21、21’は、その長手方向軸線がフォークリフトのハンドルを左右に限界まで操作したときに取る各操舵輪Tの前後方向中心軸線L1とほぼ平行になるように、配置されているので、シリンダ21、21’と操舵輪Tとの干渉を低減することができ、ひいては、操舵装置20の設計の自由度を向上させることができる。
【0024】
ハンドルが左に切られたときにはまた、操舵右輪用のシリンダ21’の室14’にも作動油が供給され、ピストンロッド22はシリンダ21内に引っ込められる。ピストンロッド22が引っ込む際には、シリンダ21は固定ピンPを中心に図4で見たとき反時計方向に回動し、これによりピストンロッド22が受けるモーメントを減ずることができるのは、前述した操舵左輪におけるのと同じである。
尚、各ピストンロッド22はタイロッドTRによって連結されているので、一方のピストンロッド22の突出量と、他方のピストンロッド22の引っ込み量と左右方向成分を同じにすることができる。
【0025】
続いて、図5を参照して本発明の第3実施形態の操舵装置を説明する。
全体的に参照番号30で示される第3実施形態の操舵装置は、第1実施形態の操舵装置10のパワーシリンダ機構に代えて、ピニオン/ラック機構を採用している点で、操舵装置10と異なる。その他の構造は、第3実施形態の操舵装置30と、第1実施形態の操舵装置10とでほぼ共通であるので、共通する構造についての第3実施形態の操舵装置30の説明はここでは省略し、また、第1実施形態の操舵装置10の要素と共通する第3実施形態の操舵装置30の要素には、第1実施形態の操舵装置10の要素に使用したのと同じ参照番号を使用する。
【0026】
操舵装置30のピニオン/ラック機構は、フォークリフトの操作者がハンドルを操作した(ハンドルを切った)方向、その操作量に応答して、所定方向に、所定量回転するようになったモータMと、減速機(図示せず)を介してモータMに連結されたピニオンPOと、このピニオンPOと係合し、ピニオンPOの回転により変位する変位部材、すなわち、ラック部材Rとを有する。
ラック部材Rの各端部には第1ピン16を介して第1アーム17が回動自在に取り付けられる。第1ピン16、第1アーム17から操舵輪Tまでの構造は、第1実施形態の操舵装置10の構造と同様である。
【0027】
この操舵装置30の作動を、フォークリフトの操作者がハンドルを左に切った場合を例にして説明する。
ハンドルが左に切られると、モータMが回転され、この回転が減速機を介してピニオンPを図5で見たときに反時計方向に回転させる。すると、ピニオンPOに係合されたラック部材Rは、図5bに示すように、図5で見たときに左に移動され、この結果、操舵左輪Tの第1ピン16は外方に移動され、操舵右輪Tの第1ピン16は内方に移動され、ついには、操舵輪Tは夫々、その前後方向中心軸線L1が図5aに示される直進時の前後方向中心軸線Lに対して90度以上の角度αを構成する位置まで操舵されることになる。すなわち、旋回内側操舵輪の切れ角は90度以上である。
【0028】
ところで、上記実施形態はいずれも、本発明の操舵装置を後輪に適用したものであったけれども、以下説明するように、本発明の操舵装置は前輪、後輪の両方に適用することもできる。これらの例を図6乃至図8に示す。
図6は、図1及び図2を参照して説明した操舵装置と同一の構造の操舵装置を前輪に備え、この前輪用操舵装置にリンク機構を介して後輪用操舵装置を同期させるようになったフォークリフトの実施形態を示す。
【0029】
従って、ここでは、前輪用操舵装置40の各要素には、図1及び図2に示した操舵装置の対応する要素に使用された参照番号を使用し、前輪用操舵装置40の構造、作動に関する説明は繰り返し行わない。尚、この前輪用操舵装置40においても、旋回内側操舵輪の切れ角が90度以上になるように構成されているが、図6で分かるように、後輪は、操舵時、図1及び図2に示した操舵装置における後輪と全く同じ向き、切れ角であるのに対して、前輪は、操舵時、図1及び図2に示した操舵装置における後輪とは向きに関しては逆となる。すなわち、フォークリフトにおける各側の前後操舵輪は、操舵時、逆相位となるように配置、構成されている。
【0030】
後輪用操舵装置50もまた前輪用操舵装置の構造とほぼ同様な構造を有する。従って、後輪用操舵装置50の各要素には、図1及び図2に示した操舵装置の対応する要素に使用された参照番号を使用し、対応する構造、作動に関する説明は繰り返し行わない。
後輪用操舵装置50は、油圧シリンダ11、ピストンロッド12を備えず、左右の第1アーム17の第1端部17A同士が第1ピン16を介してタイロッド51(左右の操舵輪間を変位されるようになった変位部材)によって互いに連結されている点で、前輪用操舵装置40や、図1及び図2に示した操舵装置10と相違する。
【0031】
この実施形態では、前輪用操舵装置40の左前輪の第1端部17Aと後輪用操舵装置50の左後輪の第1端部17Aとが、リンク機構60を介して連結されている。
リンク機構60は、一方の端部61Aが前輪用操舵装置40の左前輪の(上下いずれかの方向に延長された)第1ピン16に枢着された第1ロッド61を有する。
【0032】
リンク機構60はまた第1L字形部材62を有し、この第1L字形部材62は、自由端が第1ロッド61の他方の端部61Bに枢着された長第1アーム62Aと、この長第1アーム62Aに対して角度がつけられている短第2アーム62Bとを有し、アーム62A、62Bの接合部付近で、フォークリフトの一部に固定された静止ピン、すなわち、第1回動ピン63によって回動自在に支持されている。
リンク機構60は、後輪用操舵装置50に関連して、前輪用操舵装置40と同様に、一方の端部64Aが後輪用操舵装置50の左後輪の(上下いずれかの方向に延長された)第1ピン16に枢着された第2ロッド64を有する。
【0033】
リンク機構60は更に第2L字形部材65を有し、この第2L字形部材65は、自由端が第2ロッド64の他方の端部64Bに枢着された長第1アーム65Aと、長第1アーム65Aに対して角度がつけられている短第2アーム65Bとを有し、アーム65A、65Bの接合部付近で、フォークリフトの一部に固定された静止ピン、すなわち、第2回動ピン66によって回動自在に支持されている。
リンク機構60ははまたコネクティングロッド67を有し、コネクティングロッド67の前端は第1L字形部材62の短第2アーム62Bの自由端に、コネクティングロッド67の後端は第2L字形部材65の短第2アーム65Bの自由端に、夫々、枢着されている。
【0034】
従って、ハンドルWが左に切られると、図1及び図2に示した操舵装置10におけるのと同様の原理によって、前輪用操舵装置40のピストンロッド12が図6で見て左に突出し、前輪がフォークリフトを左旋回させるように切られるが、その際、前輪用操舵装置40の左前輪の(上下いずかの方向に延長された)第1ピン16に枢着された第1ロッド61もまた、ピストンロッド12に引っ張られることになる。すると、長第1アーム62Aが第1ロッド61に連結された第1L字形部材62は、第1回動ピン63を中心に、図6で見たとき反時計方向に回動される。
【0035】
かかる第1L字形部材62の回動により、これにコネクティングロッド67を介して連結された第2L字形部材65は、第2回動ピン66を中心に、図6で見たとき時計方向に回動される。その結果、第2回動ピン66の長第1アーム66Aに連結された第2ロッド64は、図1及び図2に示した操舵装置のピストンロッド12が左に向って突出したときと同様に、左後輪の第1アーム17を図6で見た時、左に移動させ、また、タイロッド51で左後輪の第1アーム17に連結された右後輪の第1アーム17を左に移動させる。これにより、図1及び図2に示した操舵装置10におけるのと同様の原理によって、後輪がフォークリフトを左旋回させるように切られる。
【0036】
かくして、前輪用操舵装置と後輪用操舵装置は、ハンドル操作に従って同期して作動する。
尚、車輪又はタイヤのスリップを理論上なくす乃至少なくする観点からは、フォークリフトの旋回時、前後左右の車輪の法線の交点がフォークリフトの中心乃至中心付近で交わるように、前輪用操舵装置、後輪用操舵装置を設計する(これら各装置の各要素の寸法等を選択、決定する)のが好ましい。
【0037】
図7に示す実施形態のフォークリフトは、図6に示す前輪用操舵装置40と同一構造の前輪用操舵装置40と、ハンドルWにより直接操舵されるのではないことを除き、図1及び図2に示した後輪用操舵装置10と同一構造の後輪用操舵装置10と、前輪用操舵装置40の作動に応じて後輪用操舵装置10を作動させるための電気油圧制御装置70とを有する。
【0038】
電気油圧制御装置70は、ハンドルWに取り付けられた、ハンドルWの操舵角を検出するための操舵角センサ71と、コントローラ72と、後輪用操舵装置10のパワーシリンダ機構を作動させるための油圧システム73とを有する。
コントローラ72は、ハンドルWが操作されて前輪用操舵装置40が作動する際には、操舵角センサ71からハンドルWの操舵角に関する信号を受信し、前輪の操舵角に対応して前輪と逆位相に後輪を操舵するように後輪用操舵装置10のパワーシリンダ機構を作動させるための信号を油圧システム73に送信するようになっている。
【0039】
後輪用操舵装置10はハンドルWによって直接機械的に操作されるようになっていないため、この実施形態では、電気油圧制御装置70は、コントローラ72に接続された、後輪の切れ角を検出するための舵角センサ74を有する。しかして、コントローラ72は、ハンドルWの操舵角、すなわち、前輪の舵角と後輪の舵角とが対応していないことが舵角センサ74からの信号によって判明したときには、前輪の舵角との相違をなくすように後輪を操舵するための補正信号を油圧システム73に送信するようになっている。
【0040】
最後に、図8に示す実施形態のフォークリフトは、図7に示す後輪用操舵装置10と同一構造の前輪用操舵装置80、後輪用操舵装置90と、ハンドルWの操作に応じて前輪用操舵装置80と、後輪用操舵装置90を作動させるための電気油圧制御装置100とを有する。
電気油圧制御装置100は、ハンドルWに取り付けられた、ハンドルWの操舵角を検出するための操舵角センサ101と、コントローラ102と、前輪用操舵装置80のパワーシリンダ機構を作動させるための油圧システム103と、後輪用操舵装置90のパワーシリンダ機構を作動させるための油圧システム104とを有する。
【0041】
コントローラ102は、ハンドルWが操作されると、操舵角センサ101からハンドルWの操舵角に関する信号を受信し、ハンドルWの操舵角に対応して前輪と後輪とを逆位相に操舵するように、前輪用操舵装置80のパワーシリンダ機構を作動させるための信号を油圧システム103に、また、後輪用操舵装置90のパワーシリンダ機構を作動させるための信号を油圧システム104に送信するようになっている。
【0042】
前輪用操舵装置80、後輪用操舵装置90共に、ハンドルWによって直接機械的に操作されるようになっていないため、この実施形態では、電気油圧制御装置100は、夫々、コントローラ102に接続された、前輪の切れ角を検出するための舵角センサ105と、後輪の切れ角を検出するための舵角センサ106とを有する。
【0043】
しかして、コントローラ102は、ハンドルWの操舵角と、前輪の舵角、及び/又は、後輪の舵角とが対応していないことが舵角センサ105、及び/又は、106からの信号によって判明したときには、ハンドルWの操舵角とのズレ(不対応)をなくすように、前輪、後輪を操舵するための補正信号を、夫々、油圧システム103、104に送信するようになっている。
【0044】
本発明は、上述した実施形態に限定されることなく、種々の変更が可能である。
例えば、後輪を操舵輪とする上記実施形態においては、前輪の夫々に可逆回転可能なモータを設けて、旋回時、旋回方向に応じて、前右輪と前左輪とを逆回転させることによって車両旋回半径を短くすることができるようにしても良い。かかるモータは、バッテリ式フォークリフトにおいては電動モータが、また、エンジン式フォークリフトにおいては油圧モータが好ましい。
【0045】
【発明の効果】
以上のとおり、本発明は、操舵輪の上方に広い空間を必要としない操舵装置を提供することができる。
【図面の簡単な説明】
【図1】本発明の一実施形態における操舵装置の部分拡大概略斜視図である。
【図2】図2aは、操舵輪が直進状態にある図1の操舵装置の概略図であり、図2bは、操舵輪が左旋回状態にある図1の操舵装置の概略図である。
【図3】図1の操舵装置を採用したフォークリフトの概略図である。
【図4】図4aは、操舵輪が直進状態にある第2実施形態の操舵装置の概略図であり、図4bは、操舵輪が左旋回状態にある第2実施形態の操舵装置の概略図である。
【図5】図5aは、操舵輪が直進状態にある第3実施形態の操舵装置の概略図であり、図5bは、操舵輪が左旋回状態にある第3実施形態の操舵装置の概略図である。
【図6】本発明の操舵装置を前後輪に採用したフォークリフトの概略図である。
【図7】本発明の操舵装置を前後輪に採用したフォークリフトの概略図である。
【図8】本発明の操舵装置を前後輪に採用したフォークリフトの概略図である。
【図9】従来の操舵装置の部分断面図である。
【符号の説明】
T 操舵輪
10 操舵装置
12 変位部材(ピストンロッド)
17 第1アーム
19 第2アーム
19C 中間部
Claims (8)
- 左右2つの操舵輪を操作するための、車両用操舵装置であって、
ハンドル操作に従って前記操舵輪間を変位されるようになった変位部材と、
一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、
第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記各操舵輪に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、
前記車両のハンドルを操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上になることができるように構成された
ことを特徴とする、前記車両用操舵装置。 - 前記第1アーム、第2アームの寸法形状、配置位置、前記第1ピン、第2ピン、静止ピンの配置位置が、前記車両のハンドルを操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上になることができるように、決定されたことを特徴とする、請求項1記載の前記車両用操舵装置。
- 前記変位部材が、前記車両のハンドル操作に従って作動されるパワーシリンダ機構のピストンロッドによって構成され、前記パワーシリンダ機構は、前記車体に固定された1つの油圧シリンダと、両端部が前記油圧シリンダから突出するように前記油圧シリンダに摺動自在に取り付けられた1つの前記ピストンロッドとを有し、該ピストンロッドの各端部に前記第1アームの前記一方の端部が取り付けられたことを特徴とする、請求項1又は請求項2記載の前記車両用操舵装置。
- 前記変位部材が、前記車両のハンドル操作に従って作動されるパワーシリンダ機構のピストンロッドによって構成され、前記パワーシリンダ機構は、2つの油圧シリンダと、一方の端部のみが前記各油圧シリンダから突出するように前記各油圧シリンダに摺動自在に取り付けられた前記ピストンロッドとを有し、該各ピストンロッドの前記一方の端部に前記第1アームの前記一方の端部が取り付けられ、前記各油圧シリンダの、前記ピストンロッドの前記一方の端部が突出する端部と反対側に位置する端部が、固定ピンによって前記車体に回動自在に取り付けられていることを特徴とする、請求項1又は請求項2記載の前記車両用操舵装置。
- 前記変位部材がピニオン/ラック機構のラック部材によって構成され、前記ピニオン/ラック機構は、前記車両のハンドル操作に従って作動されるモータと、該モータに連結されたピニオンと、該ピニオンと係合し、前記ピニオンの回転により変位する前記ラック部材とを有し、該ラック部材の各端部に前記第1アームの前記一方の端部が取り付けられたことを特徴とする、請求項1又は請求項2記載の前記車両用操舵装置。
- 夫々が左右2つの操舵輪を有する前後の操舵輪を操作するための、車両用操舵装置であって、該車両用操舵装置が、前輪用操舵装置と、後輪用操舵装置とを有し、
これらの操舵装置の各々が、
ハンドル操作に従って前記左右の操舵輪間を変位されるようになった変位部材と、
一方の端部が前記変位部材の各端部に第1ピンを介して回動自在に取り付けられた第1アームと、
第2アームとを有し、該第2アームは、角度付きアームであり、前記各第1アームの他方の端部に第2ピンを介して回動自在に取り付けられた一方の端部と、前記左右の操舵輪の各々に取り付けられた他方の端部と、前記第2アームの前記一方の端部と前記他方の端部との間に延びる中間部とを有し、該中間部が、前記車両の車体の一部に固定された静止ピンに回動自在に取り付けられ、
前記車両のハンドルを操作したときに、前記操舵輪のうち旋回内側操舵輪の切れ角が90度以上になることができるように構成された
ことを特徴とする、前記車両用操舵装置。 - 前記前輪用操舵装置と後輪用操舵装置とは、前記ハンドル操作に従って同期して作動するように、構成されている、請求項6記載の車両用操舵装置。
- 請求項1乃至請求項7のいずれか一項に記載の車両用操舵装置を有するフォークリフト。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003024000A JP2004231111A (ja) | 2003-01-31 | 2003-01-31 | 操舵装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003024000A JP2004231111A (ja) | 2003-01-31 | 2003-01-31 | 操舵装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004231111A true JP2004231111A (ja) | 2004-08-19 |
Family
ID=32952652
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003024000A Withdrawn JP2004231111A (ja) | 2003-01-31 | 2003-01-31 | 操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004231111A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004053727A1 (de) * | 2004-11-06 | 2006-05-11 | Zf Friedrichshafen Ag | Fahrzeug mit wenigstens einer lenkbar ausgeführten Fahrzeugachse |
| WO2014075921A1 (de) * | 2012-11-15 | 2014-05-22 | Hubtex Maschinenbau Gmbh & Co. Kg | Lenksystem für ein flurförderzeug |
| CN112938831A (zh) * | 2021-04-12 | 2021-06-11 | 合肥搬易通科技发展有限公司 | 一种前轮同步转动液压系统及其叉车 |
| CN113905974A (zh) * | 2019-04-05 | 2022-01-07 | 奥斯克什公司 | 全电动剪刀式提升机 |
-
2003
- 2003-01-31 JP JP2003024000A patent/JP2004231111A/ja not_active Withdrawn
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004053727A1 (de) * | 2004-11-06 | 2006-05-11 | Zf Friedrichshafen Ag | Fahrzeug mit wenigstens einer lenkbar ausgeführten Fahrzeugachse |
| WO2014075921A1 (de) * | 2012-11-15 | 2014-05-22 | Hubtex Maschinenbau Gmbh & Co. Kg | Lenksystem für ein flurförderzeug |
| AU2013347045B2 (en) * | 2012-11-15 | 2017-02-02 | Hubtex Maschinenbau Gmbh & Co. Kg | Steering system for an industrial truck |
| US9751738B2 (en) | 2012-11-15 | 2017-09-05 | Hubtex Maschinenbau Gmbh & Co. Kg | Steering system for an industrial truck |
| EP2920105B1 (de) | 2012-11-15 | 2017-12-27 | Hubtex Maschinenbau GmbH & Co. KG | Lenksystem für ein flurförderzeug |
| CN113905974A (zh) * | 2019-04-05 | 2022-01-07 | 奥斯克什公司 | 全电动剪刀式提升机 |
| CN113905974B (zh) * | 2019-04-05 | 2024-05-14 | 奥斯克什公司 | 全电动剪刀式提升机 |
| CN112938831A (zh) * | 2021-04-12 | 2021-06-11 | 合肥搬易通科技发展有限公司 | 一种前轮同步转动液压系统及其叉车 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3904721B2 (ja) | 多軸車両用操舵システム | |
| JP4389993B2 (ja) | 車両のステアリング装置 | |
| JP6297306B2 (ja) | 車両 | |
| CN103124668A (zh) | 具有可变轮距的车辆 | |
| WO2014171389A1 (ja) | ステアリング装置、そのステアリング装置を用いた車両、及び、4輪転舵機構を備えた車両 | |
| JP2015066975A (ja) | ステアリング装置 | |
| JP2006264510A (ja) | 自動車 | |
| JP4591237B2 (ja) | 車両のステアリング装置 | |
| FI80857C (fi) | Ett foerfarande foer att styra en transportanordning och en transportanordning foer att utnyttja foerfarandet. | |
| JP2004231111A (ja) | 操舵装置 | |
| JP4624151B2 (ja) | 自動車の操舵装置 | |
| JP2015071363A (ja) | ステアリング装置 | |
| JP2016055804A (ja) | ステアリング装置及び車両の走行モードの切り替え方法 | |
| JP5086943B2 (ja) | 車両用操舵装置 | |
| KR101526376B1 (ko) | 스티어 바이 와이어 장치 | |
| JP2017007633A (ja) | ステアリング装置、及び車両の走行モードの切り替え方法 | |
| JP2014210484A (ja) | 4輪転舵機構を備えた車両 | |
| WO2016039312A1 (ja) | ステアリング装置、及び車両の走行モードの切り替え方法 | |
| JPH0222389Y2 (ja) | ||
| JP2004299537A (ja) | 産業車両のトーイン調整機構 | |
| JP4684932B2 (ja) | 操舵装置 | |
| JPH07329814A (ja) | U型フレーム車両の後車輪操舵装置 | |
| JP2528460B2 (ja) | 車両の4輪操舵装置 | |
| JPH0419069B2 (ja) | ||
| JPH08127357A (ja) | ステアリングシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060404 |