JP2004200215A - 薄厚ウエハ搬送用ロボットハンド - Google Patents
薄厚ウエハ搬送用ロボットハンド Download PDFInfo
- Publication number
- JP2004200215A JP2004200215A JP2002363513A JP2002363513A JP2004200215A JP 2004200215 A JP2004200215 A JP 2004200215A JP 2002363513 A JP2002363513 A JP 2002363513A JP 2002363513 A JP2002363513 A JP 2002363513A JP 2004200215 A JP2004200215 A JP 2004200215A
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- robot hand
- thin wafer
- air
- parts
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
【課題】薄厚ウエハの搬送時の垂れによる接触を防止する薄厚ウエハ搬送用ロボットハンドを提供することを課題とするものである。
【解決手段】ロボットハンドの本体1に制御装置によって制御される円盤5が正逆転すると、Yリンク4,4を介して摺動溝3,3に案内されてY軸方向に同時に内方又は外方に移動する摺動部2,2を設け、各摺動部2,2にはそれぞれウエハAを挟持する挟持部6,6,7,7を設ける。挟持部7,7は制御装置によって制御される円盤9が回動すると、Xリンク8を介して摺動部2,2上をX軸方向に移動するように構成する。ロボットハンドの本体1にコンプレッサー(図示せず)に接続されたエアー管11を介してエアーを噴出させる噴出孔10を設け、噴出するエアーで挟持されたウエハAを略水平になるように押上げて、ウエハAの垂れによる本体1との接触を防止する。
【選択図】 図1
【解決手段】ロボットハンドの本体1に制御装置によって制御される円盤5が正逆転すると、Yリンク4,4を介して摺動溝3,3に案内されてY軸方向に同時に内方又は外方に移動する摺動部2,2を設け、各摺動部2,2にはそれぞれウエハAを挟持する挟持部6,6,7,7を設ける。挟持部7,7は制御装置によって制御される円盤9が回動すると、Xリンク8を介して摺動部2,2上をX軸方向に移動するように構成する。ロボットハンドの本体1にコンプレッサー(図示せず)に接続されたエアー管11を介してエアーを噴出させる噴出孔10を設け、噴出するエアーで挟持されたウエハAを略水平になるように押上げて、ウエハAの垂れによる本体1との接触を防止する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、薄厚ウエハを搬送する搬送用ロボットのロボットハンドに関するものである。
【0002】
【従来の技術】
従来、厚みが600μm以上のウエハを搬送用ロボットハンドを使用して搬送していたが、近年厚みが100〜300μmの薄厚ウエハが使用されるようになり、ウエハの搬送時にウエハに垂れが生じ、ウエハの底部が搬送用のロボットハンドに接触してパーティクルやウエハ上のバンプの破損等の問題が発生していた。
【0003】
【特許文献1】
特開2000−195936号公報
【0004】
【発明が解決しようとする課題】
そこで、本発明は、薄厚ウエハの搬送時の垂れによる接触を防止する薄厚ウエハ搬送用ロボットハンドを提供することを課題とするものである。
【0005】
【課題を解決するための手段】
本発明は、上記の課題を解決するためになされたもので、ロボットハンドの本体にウエハの周縁を挟持する複数の移動自在な挟持部を設け、且つウエハの下部にエアーを噴出するエアー放出装置を設けた薄厚ウエハ用搬送用ロボットハンドである。
【0006】
【発明の実施の形態】
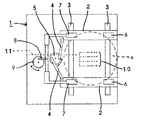
図1は本発明の一実施例の平面図、図2はその一部截断側面図を示し、1はロボットハンドの本体、2,2は制御装置によって制御される円盤5が正逆転するとYリンク4,4を介して、摺動溝3,3に案内され、Y軸方向に同時に内方又は外方に移動する摺動部で、それぞれウエハAを挟持する挟持部6,6、7,7が設けられている。そして、前記挟持部7,7は制御装置によって制御される円盤9が回動すると、Xリンク8を介して摺動部2,2上をX軸方向に移動するように構成されている。
【0007】
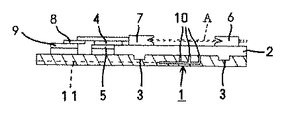
10はエアー噴出孔、11はエアー管で、コンプレッサー(図示せず)に接続されており、コンプレッサーから送られたエアーはエアー管11を通じて噴出孔10から噴出し、挟持されたウエハAを略水平になるように押上げてウエハの垂れによる本体1との接触を防止する。尚本体1上面にはテフロン(登録商標)テープ等を貼付して、ウエハAと本体1が万一接触した時、パーティクルやバンブの破損を防ぐようにしてある。
【0008】
【発明の効果】
以上本発明によれば、薄厚ウエハの下部に噴出孔からエアーを噴出させ、それによりウエハAとロボットハンドとの接触を防止するようにしたので、ウエハAの破損を防止することができる。
【図面の簡単な説明】
【図1】本発明の一実施例の平面図。
【図2】本発明の一実施例の一部截断側面図。
【符号の説明】
1 本体
2 摺動部
3 摺動溝
4 Yリンク
5,9 円盤
6,7 把持部
8 Xリンク
10 エアー噴出孔
11 エアー管
A ウエハ
【発明の属する技術分野】
本発明は、薄厚ウエハを搬送する搬送用ロボットのロボットハンドに関するものである。
【0002】
【従来の技術】
従来、厚みが600μm以上のウエハを搬送用ロボットハンドを使用して搬送していたが、近年厚みが100〜300μmの薄厚ウエハが使用されるようになり、ウエハの搬送時にウエハに垂れが生じ、ウエハの底部が搬送用のロボットハンドに接触してパーティクルやウエハ上のバンプの破損等の問題が発生していた。
【0003】
【特許文献1】
特開2000−195936号公報
【0004】
【発明が解決しようとする課題】
そこで、本発明は、薄厚ウエハの搬送時の垂れによる接触を防止する薄厚ウエハ搬送用ロボットハンドを提供することを課題とするものである。
【0005】
【課題を解決するための手段】
本発明は、上記の課題を解決するためになされたもので、ロボットハンドの本体にウエハの周縁を挟持する複数の移動自在な挟持部を設け、且つウエハの下部にエアーを噴出するエアー放出装置を設けた薄厚ウエハ用搬送用ロボットハンドである。
【0006】
【発明の実施の形態】
図1は本発明の一実施例の平面図、図2はその一部截断側面図を示し、1はロボットハンドの本体、2,2は制御装置によって制御される円盤5が正逆転するとYリンク4,4を介して、摺動溝3,3に案内され、Y軸方向に同時に内方又は外方に移動する摺動部で、それぞれウエハAを挟持する挟持部6,6、7,7が設けられている。そして、前記挟持部7,7は制御装置によって制御される円盤9が回動すると、Xリンク8を介して摺動部2,2上をX軸方向に移動するように構成されている。
【0007】
10はエアー噴出孔、11はエアー管で、コンプレッサー(図示せず)に接続されており、コンプレッサーから送られたエアーはエアー管11を通じて噴出孔10から噴出し、挟持されたウエハAを略水平になるように押上げてウエハの垂れによる本体1との接触を防止する。尚本体1上面にはテフロン(登録商標)テープ等を貼付して、ウエハAと本体1が万一接触した時、パーティクルやバンブの破損を防ぐようにしてある。
【0008】
【発明の効果】
以上本発明によれば、薄厚ウエハの下部に噴出孔からエアーを噴出させ、それによりウエハAとロボットハンドとの接触を防止するようにしたので、ウエハAの破損を防止することができる。
【図面の簡単な説明】
【図1】本発明の一実施例の平面図。
【図2】本発明の一実施例の一部截断側面図。
【符号の説明】
1 本体
2 摺動部
3 摺動溝
4 Yリンク
5,9 円盤
6,7 把持部
8 Xリンク
10 エアー噴出孔
11 エアー管
A ウエハ
Claims (1)
- ロボットハンド本体にウエハの周縁を挟持する複数の移動自在な挟持部を設け、且つウエハの下部にエアーを噴出するエアー放出装置を設けたことを特徴とする薄厚ウエハ搬送用ロボットハンド。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002363513A JP2004200215A (ja) | 2002-12-16 | 2002-12-16 | 薄厚ウエハ搬送用ロボットハンド |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002363513A JP2004200215A (ja) | 2002-12-16 | 2002-12-16 | 薄厚ウエハ搬送用ロボットハンド |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004200215A true JP2004200215A (ja) | 2004-07-15 |
Family
ID=32761646
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002363513A Pending JP2004200215A (ja) | 2002-12-16 | 2002-12-16 | 薄厚ウエハ搬送用ロボットハンド |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004200215A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100798483B1 (ko) * | 2006-08-31 | 2008-01-28 | 로체 시스템즈(주) | 사이드 에지형 웨이퍼 클램핑 핸드 |
| CN108527447A (zh) * | 2018-04-26 | 2018-09-14 | 阜阳盛东智能制造技术研发有限公司 | 一种用于机械手的支撑件 |
| CN111546264A (zh) * | 2020-05-18 | 2020-08-18 | 湖南文理学院 | 一种机电一体化均压夹紧装置 |
-
2002
- 2002-12-16 JP JP2002363513A patent/JP2004200215A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100798483B1 (ko) * | 2006-08-31 | 2008-01-28 | 로체 시스템즈(주) | 사이드 에지형 웨이퍼 클램핑 핸드 |
| CN108527447A (zh) * | 2018-04-26 | 2018-09-14 | 阜阳盛东智能制造技术研发有限公司 | 一种用于机械手的支撑件 |
| CN108527447B (zh) * | 2018-04-26 | 2020-10-20 | 枣庄龙海自动化设备有限公司 | 一种用于机械手的支撑件 |
| CN111546264A (zh) * | 2020-05-18 | 2020-08-18 | 湖南文理学院 | 一种机电一体化均压夹紧装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101652849B (zh) | 用于分离硅晶片的方法和设备 | |
| US6109677A (en) | Apparatus for handling and transporting plate like substrates | |
| JP2004193195A (ja) | 搬送装置 | |
| JP2016167531A (ja) | 基板搬送用ハンド | |
| KR102315301B1 (ko) | 반송 패드 및 웨이퍼의 반송 방법 | |
| JP5159528B2 (ja) | 板状部材の支持装置および支持方法 | |
| JPH10181879A (ja) | 搬送装置 | |
| JP6392510B2 (ja) | ウェーハ搬送システム | |
| TW417150B (en) | Substrate moving device and the operating method thereof | |
| JP2004200215A (ja) | 薄厚ウエハ搬送用ロボットハンド | |
| JP2000100896A (ja) | ウェハ搬送装置およびウェハ搬送方法 | |
| JP5157460B2 (ja) | エンドエフェクタ及びそれを備えた搬送装置 | |
| JP2009070996A (ja) | 真空吸着ステージおよびそれを用いた半導体製造方法。 | |
| JP2017112255A (ja) | 搬送装置 | |
| JP3292639B2 (ja) | 回転保持装置及び方法 | |
| JP5384305B2 (ja) | ワーク搬送装置 | |
| JP2004231331A (ja) | 基板の搬送方法及び基板の搬送装置 | |
| JP2005050855A (ja) | 吸着搬送装置 | |
| JP2006157008A (ja) | 基板支持用チャック | |
| KR100805278B1 (ko) | 웨이퍼 이송 로봇 및 이를 구비한 클러스터 툴 | |
| JP5551878B2 (ja) | 半導体ウエハの搬送装置 | |
| JP2004153157A (ja) | 真空ピンセット及び半導体ウェハ搬送方法 | |
| JPH02305740A (ja) | 基板搬送装置 | |
| JP4235266B2 (ja) | 半導体ウェーハの吸着装置 | |
| JP5053576B2 (ja) | クリーニング装置及び方法 |