JP2004000590A - 高次の勾配磁場を用いて動いている被検体のmrデータを空間エンコーディングする方法 - Google Patents
高次の勾配磁場を用いて動いている被検体のmrデータを空間エンコーディングする方法 Download PDFInfo
- Publication number
- JP2004000590A JP2004000590A JP2003126159A JP2003126159A JP2004000590A JP 2004000590 A JP2004000590 A JP 2004000590A JP 2003126159 A JP2003126159 A JP 2003126159A JP 2003126159 A JP2003126159 A JP 2003126159A JP 2004000590 A JP2004000590 A JP 2004000590A
- Authority
- JP
- Japan
- Prior art keywords
- gradient
- magnetic field
- data
- encoding
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/563—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution of moving material, e.g. flow contrast angiography
- G01R33/56375—Intentional motion of the sample during MR, e.g. moving table imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Vascular Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- High Energy & Nuclear Physics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
【解決手段】本手法は、動いている走査対象物(122)の存在中に非線形で高次の勾配磁場(126)を印加することを含む。対象物が非線形勾配磁場内を動いているときにMRデータが取得される。この結果得られる像は連続していて、k空間又は像空間の何れかにおいてデータを継ぎ合わせる必要はなく、その結果として、動いている対象物の縦方向にFOVを拡張した像が得られる。
【選択図】 図3
Description
【発明の属する技術分野】
本発明は一般的に云えば磁気共鳴イメージング(MRI)に関し、より具体的には、高次の勾配磁場を用いて、動いている対象物の空間エンコーディングを行う方法及び装置に関するものである。
【0002】
【発明の背景】
人体組織のような物質が一様な磁場(分極磁場B0)を受けると、該組織内のスピンの個別の磁気モーメントがこの分極磁場と整列しようとするが、その回りをそれぞれの固有のラーモア周波数で不規則に歳差運動する。そこで、物質(すなわち、組織)が、x−y平面内にあってラーモア周波数に近い周波数の磁場(励起磁場B1)を受けると、正味の整列したモーメント(すなわち、縦磁化)Mzがx−y平面へ向かって回転すなわち「傾斜」して、正味の横磁気モーメントMtを生じる。励起信号B1が終了した後、励起されたスピンによって信号が放出される。この信号は受信して処理することにより像(image)を構成することができる。
【0003】
これらの信号を利用して像を生成するとき、空間的に線形の磁場勾配(Gx、Gy及びGz)が使用される。典型的には、これらの勾配が特定の使用する局在化(localization)法にしたがって変えられる一連の測定サイクルによって、撮像しようとする領域を走査する。その結果得られる一組の受信NMR信号はディジタル化されて、多くの周知の再構成手法のうちの1つを使用して像を再構成するように処理される。
【0004】
典型的には、これらの線形磁場勾配はMRイメージング(撮像)の際に空間エンコーディングを行うために使用される。例えば、通常の線形Z勾配は位相エンコーディング勾配として使用することができ、その場合、対象物が静止状態に留まっている間に、全ての所要のk空間値にわたって位相エンコーディング勾配を歩進させる(ステップ状に変える)ことによって、空間エンコーディングが行われる。しかしながら、このようなシステムは磁石の撮像範囲(FOV;field ofview)に制限されており、或いは、移動可能なテーブルが用いられている場合には、動きの影響を相殺するためのステップを取る必要がある。オーバーサイズの磁石を必要とせずに患者の縦軸を撮像することが望ましい。このような大きなZ方向のFOVは、走査しながら患者を動かし、次いで像再構成の際に又はその後でデータを組み合わせることによって得ることが出来る。
【0005】
縦方向に拡張したFOVの像を取得するために使用される従来技術の方法は、典型的には、患者の動きの影響を相殺するように修正された通常の磁場勾配Gx、Gy及びGzを使用している。すなわち、線形勾配を用いたエンコーディングに依存しているこのような従来技術の方法は、生のデータをつなぎ合わせて像を再構成するか、或いは複数の再構成された「小像(sub−image)」をつなぎ合わせることが必要である。
【0006】
従って、k空間又は像空間においてデータを継ぎ合わせ(patch)することを必要とせずに、対象物が磁石内を通っている間に該対象物を走査することのできる方法及び装置を提供することは望ましいと考えられる。
【0007】
【発明の概要】
本発明は、上述の問題を克服するように、対象物が勾配磁場の中を通るときにデータを取得するために高次の勾配磁場を用いて空間エンコーディングされたMRデータを取得することのできる方法及び装置を提供する。本発明はまた、上記のことを達成するためにMR像(image)の取得に使用するためのパルス・シーケンスを含んでいる。
【0008】
本発明は、意図的な対象物の動きと高次の勾配磁場とを組み合わせて空間エンコーディングを達成するエンコーディング手法を含む。任意の所与のZ位置においてZ2勾配磁場のような二次(quadratic)勾配磁場を使用すると、局部的な勾配は近似的に線形(一次)勾配になり、従って、この勾配の値はZ位置の線形(一次)関数である。パルス・シーケンスを相次いで繰り返しているときに対象物をZ方向に動かすことによって、全範囲の有効なkZデータを収集することができる。kZに沿った二次位相補正とその後のフーリエ変換を行うことにより、k空間又は像空間の何れかにおいて継ぎ合わせを必要としない像を生成する。
【0009】
本発明は、空間エンコーディングされたMRデータを取得する方法を開示する。本方法は、目的方向に沿って次数が1よりも高い指数関係を持つ勾配磁場を印加する工程を含む。また本方法は、勾配磁場の中を通るように目的方向に走査対象物を動かす工程と、対象物が目的方向に連続して動いているときにMRデータを取得する工程とを含んでいる。
【0010】
本発明で開示するパルス・シーケンスは一連のRFパルスを含んでおり、各々のRFパルスは所定の繰返し期間内に生じる。本パルス・シーケンスはまた、非線形位相エンコーディング勾配を含んでいる。該勾配は、パルス・シーケンスの各繰返しにおいて印加される一貫した値を持つ高次の勾配で構成される。
【0011】
本発明の別の一面によれば、拡張したFOVにわたって動いている対象物を連続して撮像するMRI装置を開示する。本MRI装置は、分極磁場を印加するために磁石のボア(中孔)の周りに配置された複数の勾配コイルを含んでいる磁気共鳴イメージング・システムを有する。RF送受信器システム及びRFスイッチが、MR像を取得するためにRFコイル組立体へRF信号を送信し且つRFコイル組立体からRF信号を受信するようにパルス・モジュールによって制御される。複数の勾配コイルのうちの少なくとも1つは、高次の勾配磁場を生成するように構成される。本MRI装置はまた、縦軸に沿って磁石のボア内へ出し入れするように移動可能なテーブルも含んでいる。少なくとも1つの高次の勾配コイルは、移動可能なテーブルの縦軸の方向に沿って非線形勾配磁場を生成するように構成されている。MRI装置はまた、一連のRFパルスを送出し、且つ一連のRFパルスの各々のパルスの合間に高次の勾配磁場を印加するようにプログラミングされたコンピュータも含んでいる。コンピュータはまた、テーブルを動かし、且つ空間エンコーディング用の高次の勾配磁場の存在中にデータを取得するようにプログラミングされている。
【0012】
本発明の更に別の一面によれば、動いている対象物の縦方向にFOVを拡張してMR像を取得する方法を開示する。本方法は、縦軸が運動方向に沿って位置決めされるように走査対象物の運動方向を規定し、縦軸が運動方向に沿って位置決めされるように対象物を配置する工程を含む。本方法はまた、運動方向に非線形勾配磁場を印加し、印加した非線形勾配の中を通るように対象物を動かし、運動方向の空間エンコーディングによりk空間データを取得する工程も含んでいる。
【0013】
本発明はまた、コンピュータによって実行されたときにコンピュータに以下の動作を行わせる命令を持つコンピュータ・プログラムを含み、該命令による動作は、撮像対象物へ向けてRF信号の送出を開始し、高次の勾配コイルを付勢し、撮像対象物を連続して動かして又は撮像対象物をステップ状に動かしてMRデータを取得することを含む。上記の動作は、運動方向と一致する撮像対象物の所望の長さに沿って充分なMRデータが取得されるまで繰り返される。次いで、所望の長さの対象物についての連続した像を構成することができる。
【0014】
本発明の様々な他の特徴、目的及び利点は、以下の説明及び図面から明らかになろう。
【0015】
図面は、本発明を実施するために現在考えられる好ましい実施形態を例示している。
【0016】
【発明の好適な実施の形態】
図1は、本発明を取り入れる好ましい磁気共鳴イメージング(MRI)システム10の主要構成要素を示す。このシステムの動作は、キーボードのような入力装置13と制御パネル14と表示装置16とを含むオペレータ・コンソール12から制御される。コンソール12はリンク18を介して別個のコンピュータ・システム20と連絡しており、該コンピュータ・システム20はオペレータが表示装置16上の像の生成及び表示を制御することを可能にする。コンピュータ・システム20は、バックプレーン20aを介して互いに連絡する複数のモジュールを含む。これらのモジュールには、イメージ・プロセッサ・モジュール22、CPUモジュール24、及び像データ・アレイを記憶するフレーム・バッファとして当該分野で知られているメモリ・モジュール26が含まれる。コンピュータ・システム20は、像データ及びプログラムの記憶のためにディスク記憶装置28及びテープ駆動装置30を含み、且つ高速直列リンク34を介して別個のシステム制御装置32と連絡する。入力装置13としては、マウス、ジョイスティック、キーボード、トラック・ボール、接触作動画面、ライト・ペン型スキャナ、音声制御装置、或いは任意の同様な又は等価な入力装置が挙げられ、この入力装置は対話型のジオメトリイの規定のために用いてもよい。
【0017】
システム制御装置32はバックプレーン32aによって相互に接続された一組のモジュールを含む。これらのモジュールには、CPUモジュール36及びパルス発生器モジュール38が含まれ、パルス発生器モジュール38は直列リンク40を介してオペレータ・コンソール12に接続される。このリンク40を介して、システム制御装置32は、実行すべき走査シーケンスを指示するオペレータからの指令(コマンド)を受け取る。パルス発生器モジュール38は、所望の走査シーケンスを実行するためにシステムの構成要素を動作させ、且つ生成すべきRFパルスのタイミング、大きさ及び形状を指示するデータ、並びにデータ取得窓のタイミング及び長さを指示するデータを生成する。パルス発生器モジュール38は、一組の勾配増幅器42に接続されて、走査中に生成すべき勾配パルスのタイミング及び形状を指示する。パルス発生器モジュール38はまた生理学的データ取得制御装置44から患者データも受け取ることができる。生理学的データ取得制御装置44は、患者に接続された複数の異なるセンサからの信号、例えば、患者に取り付けられた電極からのECG信号を受け取る。パルス発生器モジュール38は、患者及び磁石システムの状態に関連した様々なセンサからの信号を受け取る走査室インターフェース回路46に接続されている。また、患者位置決めシステム48が走査室インターフェース回路46から、走査のためにテーブル49上の患者を所望の位置へ動かす指令(コマンド)を受け取る。患者テーブル49は好ましくは、患者の長さと一致した縦軸に沿ってスキャナ内に出し入れするように自動的に動かすことができる。テーブル49は連続的に又はステップ状に動かしてよい。
【0018】
パルス発生器モジュール38によって発生された勾配波形が、Gx、Gy、Gz及びGz2増幅器を持つ勾配増幅器システム42に印加される。各々の勾配増幅器は、全体を50で示した勾配コイル組立体内の対応する物理的な勾配コイルを励磁して、取得される信号を空間エンコーディングするために使用される磁場勾配を生成させる。この勾配コイル組立体50は磁石組立体52の一部を構成し、この磁石組立体52は分極用磁石54及び全身用RFコイル56を含んでいる。システム制御装置32内の送受信器モジュール58がパルスを発生し、これらのパルスはRF増幅器60によって増幅されて、送受信切換え(T/R)スイッチ62によりRFコイル56に結合される。その結果として患者内の励起された核によって放出される信号は同じRFコイル56によって検知されて、送受信切換えスイッチ62を介して前置増幅器64に結合することができる。増幅されたMR信号が送受信器58の受信器部で復調され、フィルタ処理され、ディジタル化される。送受信切換えスイッチ62はパルス発生器モジュール38からの信号によって制御されて、送信モード中はRF増幅器60をコイル56に電気接続し、且つ受信モード中は前置増幅器64をコイル56に接続する。送受信切換えスイッチ62はまた、別個のRFコイル(例えば、表面コイル)を送信又は受信モードのいずれかで使用できるようにすることができる。
【0019】
RFコイル56によって検知されたMR信号は送受信器モジュール58によってディジタル化されて、システム制御装置32内のメモリ・モジュール66へ転送される。生のk空間データ・アレイがメモリ・モジュール66に収集されたとき、走査が完了する。この生のk空間データ・アレイは再構成すべき各々の像について別々のk空間データ・アレイに配列し直され、これらのアレイの各々はアレイ・プロセッサ68に入力され、アレイ・プロセッサ68はデータをフーリエ変換して像データ・アレイを作成するように動作する。この像データは直列リンク34を介してコンピュータ・システム20へ送られ、そこでディスク記憶装置28のようなメモリに記憶される。オペレータ・コンソール12から受け取った指令に応答して、この像データはテープ駆動装置30のような長期間記憶装置に保管してもよいし、或いはイメージ・プロセッサ22によって更に処理して、オペレータ・コンソール12へ送って表示装置16上に表示してもよい。
【0020】
本発明によれば、上記の装置は、高次の勾配磁場Gz2を生成するように構成されている少なくとも1つの勾配コイルを含んでいる。この高次の勾配コイルは移動可能なテーブル49の縦軸の方向に沿って非線形勾配磁場を生成するように設計されている。本発明は、上述のNMRシステム、或いはMR像を得るための任意の同様な又は等価なシステムに使用するのに適した方法、装置、システム及び手法を含んでいる。動きを無視してエンコーディングを行うか又は動きを補償しなければならない従来の方法と異なり、本発明の手法は動きを利用する。本手法では、生のデータを連続して、すなわち継ぎ目なく取得し、従って、連続した、すなわち継ぎ目のない複数の像を再構成する能力が提供される。
【0021】
ここで図2を参照すると、Z軸について位相エンコーディングを行う際に使用するための典型的な通常のパルス・シーケンスが示されている。RF信号100の送信後に、第1の線形Z位相エンコーディング勾配102が印加されて、第1の繰返し期間TR1中にデータを取得することができる(104)。オプションとして、好ましくは、Zエンコーディング勾配102の振幅と等しい振幅を持つリワインダ(rewinder)勾配106が、次のRFパルス106より前に印加される。このような従来技術の位相エンコーディング手法では、線形Z勾配はビュー(view)毎に又は各TR毎に増分される。図2に示されているように、線形位相エンコーディング勾配108が前のZ位相エンコーディング勾配102よりも増分され、それに続いて別のデータ取得110が行われる。増分させたリワインダ勾配112の印加の後、シーケンスは別のRFパルス114と更に増分させた別の線形Z位相エンコーディング勾配116を用いて繰り返され、続いてデータ取得118が行われ、次いでリワインダ勾配120が同様に印加される。このような通常の線形Z勾配位相エンコーディングは、対象物が静止状態に留まっている間に、全ての所要のk空間値にわたって位相エンコーディング勾配を歩進させる(ステップ状に変える)ことによって達成される。この従来技術の手法では、線形Z勾配パルスが各TR毎に異なる値で印加される。従って、Z軸において空間エンコーディング行うために何らの動きも必要とされない。結果として、テーブル移動型MRIにおけるように動きが存在する場合、従来技術の手法では、動きを考慮するために線形エンコーディングを修正し、生のデータ又は再構成像をつなぎ合わせて一つの連続した像を取得しなければならない。
【0022】
説明を簡単にするために、対象物の動きの方向(運動方向)がZ方向であると仮定すると、本発明は、Z2勾配磁場のような高次の勾配を具現化することによって、Z方向の空間エンコーディングを行う従来技術の手法を修正する。高次の勾配は、動いている対象物の空間エンコーディングを達成するために運動方向に印加される。本書で用いる「高次」とは、次数が1よりも高い指数関係を持つ任意の勾配磁場、例えばZ勾配磁場について表す。k空間エンコーディングにおける必要な変化は、対象物がZ方向に、すなわち、高次の勾配磁場が印加される方向に沿って動かされているときに達成される。言い換えると、対象物の相次ぐ各々の励起時に、対象物は、非線形磁場の中を対象物が動く結果として、異なる大きさのZ方向勾配磁場を受ける。
【0023】
例えば、図3に示されているように、動いている対象物122は、第1の所与の位置Znで、非線形勾配磁場126上のそのZ位置に比例する勾配強度を持つほぼ線形の実効勾配磁場124を受ける。従って、実効線形勾配は空間位置の関数として変化する。対象物の一部分が最大+Z位置から最大−Z位置へと進むとき、対象物は+Gz〜−Gzの全範囲の勾配強度に遭遇する。高次の勾配の強度を一定に保つと共に、Z方向における対象物の位置を変えることによって、必要なZ方向k空間データを対象物に与えて、Z方向における空間局在化を達成する。
【0024】
ここで図4を参照すると、対象物122は距離m動いてZ位置Zn+mにある。位置Zn+mにおける実効、すなわち見かけの線形勾配128は、非線形勾配126に沿って未だほぼ線形であるが、異なる値すなわち勾配強度を持っている。従って、この場合、勾配磁場はZ2に比例する空間依存性を持ち、「見かけの」線形勾配は空間位置の関数として変化する。当業者には容易に認められるように、図3及び4に示された2つの位置は相次ぐTRを表していないが、対象物が2つの位置を隔てる距離にわたって動かされるとき多数のTRによって隔てられている。従って、本手法は、Z方向読出し勾配か又はステップ式Z方向位相エンコーディングのいずれかを使用して行われる伝統的なZ方向k空間エンコーディング方式と置き換えられる。本手法は単一のZ2勾配パルスを含み、このパルスにより、2D−FT、螺旋(spiral)、又はその他の投影法のような通常の手段によって平面内(X及びY)空間エンコーディングを達成できるようにしながら、全kZカバー範囲が得られる。
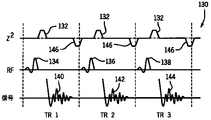
【0025】
図5を参照すると、この運動誘導型空間エンコーディング手法を取り入れたパルス・シーケンス130が示されており、このシーケンスは、RFパルス134,136,138等に続いて、各TR毎に同じ値で印加される高次のエンコーディング・パルス132を含んでいる。同じ値の二次エンコーディング勾配132が各TR中に印加され、データが140,142,144等で取得される。オプションとして、同様な強度のリワインダ勾配146を印加して、次のTR中の次のRFパルスより前にスピンを位相戻し(rephase)する。対象物の動きの正確な値を算出して、非線形磁場の二次関係に基づいてkZエンコーディング方式での正しい増分を与える。対象物は連続的に又はステップ状に動かしてよいことに留意されたい。
【0026】
他の空間エンコーディング・パルス・シーケンスも可能であり、本発明の範囲内にあると見なされる。このような他のパルス・シーケンスによっては、X及び/又はY方向にも空間エンコーディングを取り入れることができる。図6は、このような1つのパルス・シーケンス150を示しており、該シーケンスにおいて、平面貫通方向(through−plane)エンコーディング158のためにZ2勾配を用いながら、動いている対象物の平面内(X及びY)エンコーディング152,154,156のために螺旋型取得を用いている。TR1中に、対象物は位置Z1にあり、平面内エンコーディング152は第1の螺旋励起154,156と共に印加される。TR2では、対象物は量ΔZだけ動いており、螺旋励起の位相は進められる。螺旋励起を間挿する数は、1つの実効Kzエンコーディング距離を表す動きの増分ΔZの数に等しいか又はそれより少なくする。これは、対象物の位置、実効勾配Z内での変化、及び高次の勾配Z2内での動きに基づくものである。前に示したように、高次の勾配は、対象物がその中を通っているとき一貫して等しい強度で印加される。Z2勾配の形状のため、対象物がZ方向に動かされるとき、追加のB0位相シフトが観察されることがある。この位相シフトは、像再構成の際に対応するビュー依存性位相シフトで補償し得る。Z2勾配の全範囲にわたって対象物を動かすことにより、完全な3Dデータ・セットが得られ、このデータ・セットは再構成して完全な3D像を生成することができる。
【0027】
本方法では、複数の小像から像を遡及的に継ぎ合わせることなく、またk空間データをつなぎ合わせることなく、MRシステムの固定した撮像範囲に関係なく任意の長さの対象物の連続的な撮像が可能になる。更に、本方法は完全な3D像の時間効率のよい取得を行い、また修正FIESTA(SSFP)シーケンスのような高速勾配呼び戻し法を使用した高速高分解能の全身用走査を可能にする。代替例として、本手法は周知の線又はスライス選択法を使用した1D又は2D像の取得を含む。
【0028】
従って、本発明は、空間エンコーディングされたMRデータを取得する方法を提供する。本方法は、目的方向に沿って次数が1よりも高い指数関係を持つ勾配磁場を印加する工程、及び該勾配磁場を通って目的方向に走査対象物を動かす工程を含んでいる。本方法はまた、対象物が目的方向に連続して動いているときにMRデータを取得する工程も含んでいる。
【0029】
好ましくは、上記の勾配磁場はZ方向に印加され、またエンコーディング勾配は、任意の所与の位置で勾配磁場の値が所与のZ位置の線形関数になるように、一定の値を持つ。対象物は、好ましくは、全範囲のkZを取得するために相次ぐTR時にZ方向に動かされる。取得したMRデータを目的方向に沿って位相補正し、この位相補正したMRデータをフーリエ変換した後、目的方向の空間エンコーディングを用いて像を再構成することができ、これらの像は拡張したFOVにわたって連続した像である。前に述べたように、本発明は、各々が繰返し期間TRを規定する少なくとも一連のRFパルスと、各TR中に一貫した値で印加される高次の勾配よりなる位相エンコーディング勾配とを含むMRパルス・シーケンスを提供する。
【0030】
好ましくは、上記のパルス・シーケンスは各TRの終端部に配置されたリワインダ勾配を含んでおり、このリワインダ勾配は相次ぐ各TRにおいて一貫した値を持っていて、次に来るRFパルスより前にスピンを位相戻し(rephase)する。このパルス・シーケンスは、運動誘導型空間エンコーディングを用いてデータを取得するためにパルス・シーケンスのTRに基づいて値が増分される移動可能なテーブルを持つMR装置に適用し得る。
【0031】
本発明はまた、拡張したFOVにわたって動いている対象物の連続撮像を行うMRI装置を提供する。本装置は、前に述べたように、少なくとも1つの勾配コイルが高次の勾配コイルであるMRIシステムを含んでいる。好ましくは、高次の勾配コイルは通常の線形X、Y及びZ勾配コイルに追加して設けられるが、通常のこれらのコイルの内の1つと置換してもよい。移動可能なテーブルが、磁石のボア(中孔)内へ出し入れするように撮像対象物を縦軸に沿って運ぶために設けられる。コンピュータが、一連のRFパルスを送信させ、該一連のRFパルスの中の各RFパルスの間に高次の勾配磁場を印加させるようにプログラミングされている。コンピュータはまた、テーブルを動かして、本発明に従ってデータを取得するようにプログラミングされている。
【0032】
模範的なシールド無しのZ2勾配コイルを設計し、その設計に、単層の円筒形巻型上の離散的なワイヤ位置を決定するためにシミュレーション・パッケージに書き込まれたビオサバール・シミュレーション・コードを使用した。ビオサバール・シミュレーション・コードを組み込むことのできるこのようなシミュレーション・パッケージの一例は、米国マサチューセッツ州ナティック所在のマスワークス社(MathWorks, Inc.)から入手できるMATLAB(商標)である。コイルは、長さ36インチ、直径14インチのPVC製円筒形巻型上に機械加工した溝の中に#4エナメル線を巻線し、ポッティングし、その上にガラス繊維とエポキシを巻き付けることによって製作した。その結果得られるZ2磁場マップは、コイルに異なるレベルのDC電流を印加することにより、ファントムの位相マップを用いて測定した。Z2勾配コイルの内側に嵌合するように移動可能なプラットフォームを製作し、可変速度DC電動機を使用して該プラットフォームを動かすようにした。ボディ・コイル送信/受信構成を持つ、米国ウィスコンシン州ミルウォーキ所在のGEメディカル・システムズ事業部製造の1.5T GE Lx臨床用スキャナを使用して撮像実験を行った。全てのkZビューについて一定の位相エンコーディングを保つ修正勾配エコー・パルス・シーケンスを用いて、Z軸位相エンコーディングによりコロナル(coronal)平面内で10cmの球状ファントムの満足のいく像が取得された。位相エンコーディング方向に二次位相補正を加えた後、2Dフーリエ変換を行って、像を再構成した。代替例では、オンライン・スキャナ・ソフトウエアを使用して像を再構成することが可能である。このためには、位相エンコーディング・ステップ数の自乗に比例する位相変調を適用するようにパルス・シーケンスを修正することが必要である。その結果得られる像は二次位相を持つことがあり、これはその大きさを取ることによって除くことができる。
【0033】
この非線形の実験コイルは10kHzにおいてインダクタンスが133μH、抵抗が0.057オームであった。インダクタンスが低いので、コイルは、勾配増幅器の要件に適合させるために1mHの誘導性負荷と直列に接続した。
【0034】
本発明は対象物の縦方向にFOVを拡張してMR像を取得する方法を提供し、本方法は、走査対象物の運動方向を規定し、縦軸が運動方向に沿って位置決めされるように対象物を配置する工程を含む。このプロセスは、運動方向に非線形勾配磁場を印加し、印加した非線形勾配の中を通るように対象物を動かす工程を含んでいる。従って、運動方向の空間エンコーディングによりk空間データを取得することができる。
【0035】
本発明はまた、コンピュータによって実行されたときにコンピュータに以下の動作を行わせる一組の命令を持つコンピュータ・プログラムを提供し、該命令による動作は、撮像対象物へ向けてのRF信号の送信を開始させ、高次の勾配コイルを付勢し、MRデータを取得し、撮像対象物を動かすことを含む。上記の動作は、運動方向と一致する撮像対象物の所望の長さに沿って充分なMRデータが取得されるまで繰り返される。次いで、所望の長さの対象物についての連続した像が再構成される。
【0036】
好ましくは、高次の勾配コイルはZ2勾配磁場を供給し、撮像対象物は最大+Z位置から最大−Z位置まで連続的に動かされて、連続したZ方向カバー範囲を達成する。高次の勾配コイルは付勢されて、撮像空間全体にわたって一貫した値を持つ磁場を供給する。コンピュータは更に、撮像対象物の動く方向において取得したMRデータを位相補正し、該位相補正されたMRデータをフーリエ変換し、撮像対象物の所望の長さにわたって取得されたMRデータにより単一の連続した像を再構成するようにプログラミングされている。
【0037】
従って、本発明はまた、拡張したFOVによりMR像を取得する方法を提供し、本方法は、MRスキャナの特性に基づいてデフォルトFOVを規定し、デフォルトFOVよりも大きい所望のFOVを規定することを含む。本方法は、MRスキャナに通すように対象物を動かすための運動軸を規定し、非線形勾配磁場を印加することを含んでいる。本方法はまた、運動軸に沿って非線形勾配磁場の中を通るように対象物を動かし、所望のFOVにわたってk空間データを取得して、所望のFOVにわたって連続した像を再構成することを含んでいる。
【0038】
好ましくは、非線形勾配磁場は運動軸に沿った位置に関して二次依存性を有する。二次依存性は、該二次依存性のものと等しい傾斜を持つ局部勾配磁場を提供する。
【0039】
本発明を好ましい実施形態について説明したが、明記したものの他に、等価物、代替物及び変更物が可能であり、それらが特許請求の範囲内にあることが認められよう。
【図面の簡単な説明】
【図1】本発明を用いるためのMRイメージング・システムの概略ブロック図である。
【図2】従来技術によるパルス・シーケンスのタイミング・ブロック図である。
【図3】本発明による非線形勾配磁場内の動いている対象物を表すグラフである。
【図4】本発明による非線形勾配磁場内の動いている対象物を表すグラフである。
【図5】本発明による図3及び4に示したような効果を達成するための従来技術によるパルス・シーケンスのタイミング図である。
【図6】本発明によるパルス・シーケンスの別の実施形態のタイミング図である。
【符号の説明】
10 磁気共鳴イメージング(MRI)システム
12 オペレータ・コンソール
13 入力装置
14 制御パネル
16 表示装置
18 リンク
20 コンピュータ・システム
20a バックプレーン
28 ディスク記憶装置
30 テープ駆動装置
49 テーブル
50 勾配コイル組立体
52 磁石組立体
54 分極用磁石
56 全身用RFコイル
122 動いている対象物
124 実効勾配磁場
126 非線形勾配磁場
128 実効線形勾配
130 パルス・シーケンス
132 高次のエンコーディング・パルス
134,136,138 RFパルス
136 リワインダ勾配
150 パルス・シーケンス
152,154,156 平面内(X及びY)エンコーディング
158 平面貫通方向エンコーディング
Claims (28)
- 空間エンコーディングされたMRデータを取得する方法であって、
目的方向に沿って次数が1よりも高い指数関係を持つ勾配磁場を印加する工程と、
前記勾配磁場の中を通るように前記目的方向に走査対象物を動かす工程と、
前記対象物が前記目的方向に連続して動いているときにMRデータを取得する工程と、
を含んでいる当該方法。 - 前記勾配磁場はZ方向に印加され、また前記勾配磁場は、任意の所与のZ位置で前記勾配磁場の値が該所与のZ位置の線形関数になるように一定の値を持つパルス式位相エンコーディング勾配である、請求項1記載の方法。
- 前記対象物は全範囲のkZデータを取得するために相次ぐTRでZ方向に動かされる、請求項2記載の方法。
- 前記勾配磁場はパルス式Z2勾配磁場である、請求項1記載の方法。
- 更に、取得したMRデータを前記目的方向に沿って位相補正する工程と、
前記位相補正したMRデータをフーリエ変換する工程と、
前記目的方向の空間エンコーディングにより像を再構成する工程と、
を含んでいる請求項1記載の方法。 - 各々が所定の繰返し期間TR内に生じる一連のRFパルスと、
各々のTR中に印加されるときに一貫した値を持つ高次の勾配よりなる位相エンコーディング勾配と、
を有するMRパルス・シーケンス。 - 更に、各TRの終端部に配置され且つ相次ぐ各TRにおいて一貫した値を持っていて、後続のRFパルスより前にスピンを位相戻しするリワインダ勾配を含んでいる請求項6記載のMRパルス・シーケンス。
- 運動誘導型空間エンコーディングを用いてデータを取得するために当該パルス・シーケンスのTRに基づいて値が増分される移動可能なテーブルを持つMR装置に適用される請求項6記載のMRパルス・シーケンス。
- 更に、3Dイメージングにおいて螺旋エンコーディングを行うためにTR中に生じる第1の螺旋励起と共に印加される平面内エンコーディングを含んでいる請求項6記載のMRパルス・シーケンス。
- 前記位相エンコーディング勾配は二次Z2勾配であり、また撮像対象物が前記Z2勾配に沿ってZ方向に動かされているとき、実効Z勾配磁場が前記Z2勾配に対して接線方向にある、請求項6記載のMRパルス・シーケンス。
- 拡張したFOVにわたって動いている対象物の連続撮像を行うMR装置であって、
分極磁場を印加するために磁石のボアの周りに配置された複数の勾配コイルを含んでいると共に、MR像を取得するためにRFコイル組立体へRF信号を送信するようにパルス・モジュールによって制御されるRF送受信器システム及びRFスイッチを含んでいて、前記複数の勾配コイルのうちの少なくとも1つが高次の勾配磁場を生成するように構成されている、磁気共鳴イメージング(MRI)システムと、
縦軸に沿って前記磁石のボア内へ出し入れするように移動可能なテーブルと、一連のRFパルスを送出し、該一連のRFパルスの各々のパルスの合間に高次の勾配磁場を印加し、前記テーブルを動かしてデータを取得するようにプログラミングされているコンピュータと、
を有しているMR装置。 - 前記コンピュータは更に、各々の周期的なテーブルの動きの後に収集されたデータか連続した像を再構成するようにプログラミングされている、請求項11記載のMR装置。
- 前記コンピュータは更に、所望のkZエンコーディング分解能に基づいて所与の増分で前記テーブルをステップ状に動かすようにプログラミングされている、請求項11記載のMR装置。
- 前記コンピュータは更に、各TRにおいて一貫した値を持つ高次の勾配を印加するようにプログラミングされている、請求項11記載のMR装置。
- 前記コンピュータは更に、生のデータ又は複数のアウト・イメージをつなぎ合わせることなくMRIシステムについてのデフォルトFOVよりも長さが長い継ぎ目のない像を再構成するようにプログラミングされている、請求項11記載のMR装置。
- 対象物の縦方向にFOVを拡張してMR像を取得する方法であって、
走査対象物の運動方向を規定する工程と、
縦軸が前記運動方向に沿って位置決めされるように前記対象物を配置する工程と、
前記運動方向に非線形勾配磁場を印加する工程と、
前記印加した非線形勾配磁場の中を通るように前記対象物を動かす工程と、
前記運動方向の空間エンコーディングによりk空間データを取得する工程と、を有している方法。 - 前記高次の勾配が空間Z2勾配であり、前記対象物を動かす工程が更に、前記対象物を所与の距離ΔZ動かすものとして規定されている、請求項16記載の方法。
- 更に、充分なkZエンコーディングを行うために前記高次の空間勾配磁場の基づいてΔZを算出する工程を含んでいる、請求項17記載の方法。
- 前記高次の空間勾配は一次の空間勾配以外の勾配である、請求項16記載の方法。
- 更に、各TR期間について同じ値の高次の空間勾配を印加する工程を含んでいる、請求項16記載の方法。
- 更に、各TR期間中にスピンを位相戻しするためにリワインダ勾配を印加する工程を含み、該リワインダ勾配は各期間について同じ値で印加される、請求項16記載の方法。
- コンピュータによって実行されたときに、コンピュータに以下の動作を行わせる命令、すなわち、
A)撮像対象物へ向けてRF信号の送信を開始させ、
B)高次の勾配コイルを付勢させ、
C)MRデータを取得させ、
D)前記撮像対象物を動かし、
E)前記工程A〜Dを、運動方向と一致する前記撮像対象物の所望の長さに沿って充分なMRデータが取得されるまで繰り返させ、
F)前記所望の長さの前記対象物の連続した像を再構成させる
命令を有しているコンピュータ・プログラム。 - 前記高次の勾配コイルによりZ2勾配磁場を供給させ、また連続したZ方向カバー範囲を達成するために前記撮像対象物を最大+Z位置から最大−Z位置まで連続的に動かす、請求項22記載のコンピュータ・プログラム。
- 前記高次の勾配コイルを付勢して、撮像空間全体にわたって一貫した値を持つ磁場を供給する、請求項22記載のコンピュータ・プログラム。
- 前記コンピュータは更に、撮像対象物の動く方向において取得したMRデータを位相補正し、該位相補正したMRデータをフーリエ変換し、撮像対象物の所望の長さにわたって取得されたMRデータにより単一の連続した像を再構成するようにプログラミングされている、請求項22記載のコンピュータ・プログラム。
- 拡張したFOVによりMR像を取得する方法であって、
MRスキャナの特性に基づいてデフォルトFOVを規定する工程と、
前記デフォルトFOVよりも大きい所望のFOVを規定する工程と、
前記MRスキャナに通すように対象物を動かすための運動軸を規定する工程と、
非線形勾配磁場を印加する工程と、
前記運動軸に沿って前記非線形勾配磁場の中を通るように前記対象物を動かす工程と、
前記所望のFOVにわたってk空間データを取得して、前記所望のFOVにわたって連続した像を再構成する工程と、
を有している方法。 - 前記非線形勾配磁場は前記運動軸に沿った位置に関して二次依存性を有する、請求項26記載の方法。
- 前記二次依存性は、該二次依存性のものと等しい傾斜を持つ局部勾配磁場を提供する、請求項27記載の方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/063,507 US6983181B2 (en) | 2002-05-01 | 2002-05-01 | Spatial encoding MR data of a moving subject using a higher-order gradient field |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004000590A true JP2004000590A (ja) | 2004-01-08 |
| JP2004000590A5 JP2004000590A5 (ja) | 2006-06-15 |
Family
ID=29214368
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003126159A Pending JP2004000590A (ja) | 2002-05-01 | 2003-05-01 | 高次の勾配磁場を用いて動いている被検体のmrデータを空間エンコーディングする方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US6983181B2 (ja) |
| EP (1) | EP1359430B1 (ja) |
| JP (1) | JP2004000590A (ja) |
| DE (1) | DE60331021D1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008017925A (ja) * | 2006-07-11 | 2008-01-31 | Hitachi Medical Corp | 核磁気共鳴撮像装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7558612B2 (en) * | 2002-04-16 | 2009-07-07 | The Board Of Trustees Of The Leland Stanford Junior University | Motion compensated spiral FISP MRI |
| US6983181B2 (en) * | 2002-05-01 | 2006-01-03 | General Electric Company | Spatial encoding MR data of a moving subject using a higher-order gradient field |
| DE102011007501B3 (de) * | 2011-04-15 | 2012-05-31 | Universitätsklinikum Freiburg | Verfahren der bildgebenden Magnetresonanz zur Selektion und Aufnahme von gekrümmten Schichten |
| DE102011083898B4 (de) * | 2011-09-30 | 2013-04-11 | Friedrich-Alexander-Universität Erlangen-Nürnberg | Erfassen von Magnetresonanzdaten am Rande des Gesichtsfelds einer Magnetresonanzanlage |
| JP7050753B6 (ja) * | 2016-08-15 | 2022-06-01 | コーニンクレッカ フィリップス エヌ ヴェ | 磁気共鳴検査システム用の能動シールド勾配コイルアセンブリ |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6080747A (ja) * | 1983-10-11 | 1985-05-08 | Utsunomiyadaigakuchiyou | 非線形磁場勾配を用いた核磁気共鳴映像化方法 |
| JPH08173396A (ja) * | 1994-12-21 | 1996-07-09 | Ge Yokogawa Medical Syst Ltd | Mrイメージング方法およびmri装置 |
| JP2000229073A (ja) * | 1998-12-24 | 2000-08-22 | Marconi Electronic Syst Ltd | 磁気共鳴画像装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4665365A (en) * | 1985-01-07 | 1987-05-12 | General Electric Company | Method for reversing residual transverse magnetization due to phase-encoding magnetic field gradients |
| US4770182A (en) * | 1986-11-26 | 1988-09-13 | Fonar Corporation | NMR screening method |
| US4881032A (en) * | 1988-10-21 | 1989-11-14 | General Electric Company | Method of, and apparatus for, NMR spectroscopic metabolite imaging and quantification |
| US5122748A (en) * | 1990-08-13 | 1992-06-16 | The Trustees Of Columbia University In The City Of New York | Method and apparatus for spatial localization of magnetic resonance signals |
| US6011392A (en) * | 1997-04-10 | 2000-01-04 | General Electric Company | Method for reducing Maxwell term artifacts in fast spin echo MR images |
| US6794869B2 (en) * | 2001-03-30 | 2004-09-21 | General Electric Company | Moving table MRI with frequency-encoding in the z-direction |
| DE10117342C1 (de) * | 2001-04-06 | 2002-11-21 | Siemens Ag | Kernspintomographievorrichtung und Verfahren zur Ortscodierung mit einem nichtlinearen Gradientenfeld |
| US6912415B2 (en) * | 2001-04-09 | 2005-06-28 | Mayo Foundation For Medical Education And Research | Method for acquiring MRI data from a large field of view using continuous table motion |
| US6983181B2 (en) * | 2002-05-01 | 2006-01-03 | General Electric Company | Spatial encoding MR data of a moving subject using a higher-order gradient field |
| US6707300B2 (en) * | 2002-05-17 | 2004-03-16 | Ge Medical Systems Global Technology Co., Llc | Gradient non-linearity compensation in moving table MRI |
-
2002
- 2002-05-01 US US10/063,507 patent/US6983181B2/en not_active Expired - Fee Related
-
2003
- 2003-04-25 EP EP03252643A patent/EP1359430B1/en not_active Expired - Fee Related
- 2003-04-25 DE DE60331021T patent/DE60331021D1/de not_active Expired - Lifetime
- 2003-05-01 JP JP2003126159A patent/JP2004000590A/ja active Pending
-
2005
- 2005-10-03 US US11/163,024 patent/US7558613B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6080747A (ja) * | 1983-10-11 | 1985-05-08 | Utsunomiyadaigakuchiyou | 非線形磁場勾配を用いた核磁気共鳴映像化方法 |
| JPH08173396A (ja) * | 1994-12-21 | 1996-07-09 | Ge Yokogawa Medical Syst Ltd | Mrイメージング方法およびmri装置 |
| JP2000229073A (ja) * | 1998-12-24 | 2000-08-22 | Marconi Electronic Syst Ltd | 磁気共鳴画像装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008017925A (ja) * | 2006-07-11 | 2008-01-31 | Hitachi Medical Corp | 核磁気共鳴撮像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1359430A3 (en) | 2005-04-06 |
| US20030206012A1 (en) | 2003-11-06 |
| EP1359430A2 (en) | 2003-11-05 |
| US6983181B2 (en) | 2006-01-03 |
| US7558613B2 (en) | 2009-07-07 |
| DE60331021D1 (de) | 2010-03-11 |
| US20060036161A1 (en) | 2006-02-16 |
| EP1359430B1 (en) | 2010-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6794869B2 (en) | Moving table MRI with frequency-encoding in the z-direction | |
| US6912415B2 (en) | Method for acquiring MRI data from a large field of view using continuous table motion | |
| US7573269B2 (en) | Method and apparatus for acquiring magnetic resonance imaging data | |
| US8274286B2 (en) | System and method for multi-spectral MR imaging near metal | |
| US7466131B1 (en) | System and method for designing multi-channel RF pulses for MR imaging | |
| US9664762B2 (en) | System and method for reduced field of view magnetic resonance imaging | |
| US7821264B2 (en) | System and method for MR imaging in inhomogeneous magnetic fields | |
| EP1615044A1 (en) | Continuous table motion MRI involving variable fields of view during the scan | |
| US8326399B2 (en) | Systems and methods for phase encode placement | |
| CN103083020B (zh) | 磁共振成像设备及其控制方法 | |
| EP3191862B1 (en) | Zero echo time mr imaging | |
| US7227356B1 (en) | Method and apparatus of multi-echo MR data acquisition with non-discrete flip angle train | |
| US7558613B2 (en) | Spatial encoding MR data of a moving subject using a higher-order gradient field | |
| EP1693680A1 (en) | Continuous table motion MRI involving phase correction | |
| US7239137B2 (en) | Method and apparatus for fast spin echo (FSE) prescan phase correction | |
| JP2004000593A (ja) | 画像再構成するための方法及び装置 | |
| NL2002536C2 (en) | METHOD AND APPARATUS FOR ACQUIRING MRI DATA FOR PULSE SEQUENCES WITH MULTIPLE PHASE ENCODE DIRECTIONS AND PERIODIC SIGNAL MODULATION. | |
| JP4343317B2 (ja) | 磁気共鳴イメージング装置 | |
| US7782058B2 (en) | System and method for accelerated MR imaging | |
| JP4763142B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2000316830A (ja) | 磁気共鳴イメージング方法及びそれを用いた磁気共鳴イメージング装置 | |
| US11906607B2 (en) | Efficient self-refocusing zero echo time MR imaging | |
| EP1527733A1 (en) | Method for aquiring MRI data from a large field of view using continuous table motion | |
| JPH01160541A (ja) | 磁気共鳴イメージング方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060426 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090324 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090624 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090629 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090924 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20090924 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20090924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091014 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100317 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100914 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110114 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110222 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20110318 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110614 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110617 |