EP4282584A1 - Adhesive tape sticking system and eyeglasses lens processing system - Google Patents
Adhesive tape sticking system and eyeglasses lens processing system Download PDFInfo
- Publication number
- EP4282584A1 EP4282584A1 EP23174728.8A EP23174728A EP4282584A1 EP 4282584 A1 EP4282584 A1 EP 4282584A1 EP 23174728 A EP23174728 A EP 23174728A EP 4282584 A1 EP4282584 A1 EP 4282584A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cup
- adhesive tape
- lens
- holding
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000002390 adhesive tape Substances 0.000 title claims abstract description 232
- 238000012545 processing Methods 0.000 title claims description 75
- 239000000758 substrate Substances 0.000 claims abstract description 114
- 230000000903 blocking effect Effects 0.000 claims description 72
- 230000007246 mechanism Effects 0.000 claims description 25
- 230000002093 peripheral effect Effects 0.000 claims description 11
- 238000000034 method Methods 0.000 claims description 6
- 230000008569 process Effects 0.000 claims description 4
- 230000003287 optical effect Effects 0.000 description 31
- 238000009434 installation Methods 0.000 description 10
- 230000001012 protector Effects 0.000 description 9
- 230000032258 transport Effects 0.000 description 7
- 210000000707 wrist Anatomy 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000004907 flux Effects 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 5
- 238000000926 separation method Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000005286 illumination Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B13/00—Machines or devices designed for grinding or polishing optical surfaces on lenses or surfaces of similar shape on other work; Accessories therefor
- B24B13/005—Blocking means, chucks or the like; Alignment devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B13/00—Machines or devices designed for grinding or polishing optical surfaces on lenses or surfaces of similar shape on other work; Accessories therefor
- B24B13/005—Blocking means, chucks or the like; Alignment devices
- B24B13/0057—Deblocking of lenses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B41/00—Component parts such as frames, beds, carriages, headstocks
- B24B41/005—Feeding or manipulating devices specially adapted to grinding machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B51/00—Arrangements for automatic control of a series of individual steps in grinding a workpiece
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B9/00—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor
- B24B9/02—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground
- B24B9/06—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain
- B24B9/08—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain of glass
- B24B9/14—Machines or devices designed for grinding edges or bevels on work or for removing burrs; Accessories therefor characterised by a special design with respect to properties of materials specific to articles to be ground of non-metallic inorganic material, e.g. stone, ceramics, porcelain of glass of optical work, e.g. lenses, prisms
- B24B9/146—Accessories, e.g. lens mounting devices
Definitions
- the present disclosure relates to an adhesive tape sticking system that sticks an adhesive tape on a cup serving as a processing jig for an eyeglasses lens, and an eyeglasses lens processing system including the adhesive tape sticking system.
- JP2021-058947A discloses a technique in which a robot arm, a lens meter, a cup attachment device (blocker), and an eyeglasses lens processing device are provided, and the robot arm is controlled to move an eyeglasses lens between a plurality of eyeglasses manufacturing devices.
- a technical object of the present disclosure is to provide an adhesive tape sticking system which can automatically stick an adhesive tape to a cup, and an eyeglasses lens processing system including the adhesive tape sticking system.
- an adhesive tape for example, an adhesive tape sticking system 1
- an adhesive tape for example, an adhesive tape TA
- a cup for example, a cup CU
- the adhesive tape sticking system includes a substrate movement unit (for example, an adhesive tape supply device 300), a first movement unit (for example, a robot arm 100), a second movement unit (for example, a movement unit 230 of a cup attachment device 200), and a control device (for example, a control device 600).
- the adhesive tape sticking system includes a cup attachment device (for example, the cup attachment device 200) for attaching the cup to the eyeglasses lens.
- the cup attachment device has a blocking arm (for example, a blocking arm 232) for holding the cup.
- the cup attachment device attaches the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position.
- the cup attachment device includes movement means (for example, a movement unit 230) for changing a relatively positional relationship between the cup held by the blocking arm and the eyeglasses lens supported by a lens support mechanism.
- the cup attachment device may include lens information acquisition means (for example, the lens information acquisition unit 240) for obtaining information on the eyeglasses lens supported by the lens support mechanism (for example, optical characteristics such as an optical center position of the eyeglasses lens and a direction of an astigmatic axis, and position information on a marking point assigned to the eyeglasses lens).
- lens information acquisition means for example, the lens information acquisition unit 240
- information on the eyeglasses lens supported by the lens support mechanism for example, optical characteristics such as an optical center position of the eyeglasses lens and a direction of an astigmatic axis, and position information on a marking point assigned to the eyeglasses lens.
- the substrate movement unit moves a substrate (for example, a lower mount 30) on which the adhesive tape is adhered to disposed.
- the substrate movement unit includes a belt (for example, a belt 316) on which the substrate is placed, and a drive source (for example, a motor 318) for moving the belt in a feeding direction.
- the substrate movement unit may include substrate guide means (for example, a lower mount guide mechanism 320) for guiding movement of the substrate in a direction away from a plane on which the adhesive tape is disposed.
- the substrate guide means can easily detach the adhesive tape from the substrate by separating the substrate at least in a vertical direction from the plane on which the adhesive tape is disposed.
- the direction may have a component at least in the vertical direction with respect to the plane on which the adhesive tape is disposed.
- the direction may be an oblique direction having a vertical component in a separation direction.
- adhesiveness of the substrate adhering to the adhesive tape is weaker than adhesiveness of the adhesive tape to the cup, or the same (including substantially the same case) as each other.
- the adhesiveness of the substrate adhering to the adhesive tape is weaker than the adhesiveness of the adhesive tape adhering to the cup
- the adhesive tape is more smoothly separated from the substrate while the adhesive tape is bonded to the cup.
- a shearing force acts by giving a movement trigger in a direction in which the substrate is separated from the adhesive tape. The substrate can be gradually separated from the adhesive tape while the adhesive tape is bonded to the cup.
- the first movement unit moves a first holding unit (for example, a holding portion 137) which can hold the cup.
- the first movement unit includes a robot arm.
- the robot arm has an arm portion (for example, arm portion 130) having a plurality of joint portions (for example, joint portions J1 to J6), and a holding portion (for example, a holding portion 137) provided at the arm portion to hold and release an object. Then, for example, the robot arm rotates the arm portion via the joint portion to move the object held by the holding portion.
- the holding portion is used as a first holding unit.
- a second movement unit moves a second holding unit (for example, a blocking arm 232) which can hold the cup.
- the second holding unit is a separate body from the second holding unit, and the second movement unit is configured to be a separate body from the first movement unit.
- a blocking arm included in the cup attachment device is used in the second holding unit.
- the cup is more efficiently attached to the eyeglasses lens by using the blocking arm as the second holding unit.
- the second holding unit may also serve as the first holding unit, and the second movement unit may also serve as the first movement unit. In this case, for example, the cup is held by the holding portion of the robot arm, and the holding portion is moved by the robot arm. Since the highly versatile robot arm is used as the second movement unit, restrictions on installation of the second movement unit are reduced.
- control device controls the substrate movement unit to move the substrate in a predetermined feeding direction.
- control device controls the first movement unit to move the first holding unit.
- control device controls the first movement unit to cause the first holding unit to hold an object (for example, the cup).
- control device controls the second movement unit to move the second holding unit.
- control device controls the second movement unit to cause the second holding unit to hold an object (for example, the cup).
- the control device controls the substrate movement unit to move the substrate in the predetermined feeding direction, thereby moving the adhesive tape to a first position.
- the control device controls the first movement unit to cause the first holding unit to hold the cup, and after the adhesive tape is moved to the first position, the control device moves the first holding unit in a state of holding the cup, whereby the cup is applied onto the adhesive tape.
- the control device controls the second movement unit to cause the second holding unit to hold the cup adhering to the adhesive tape.
- the control device controls at least one of the substrate movement unit and the second movement unit, and moves at least one of the first holding unit and the second holding unit to change a positional relationship between the cup held by the second holding unit and the substrate, whereby the adhesive tape stuck on the cup is separated from the substrate.
- the adhesive tape can be automatically stuck on the cup.
- an economically inexpensive and compact system can be realized without complicating a configuration of the system.
- the control device may control the substrate movement unit to move the substrate in a direction away from the cup held by the second holding unit.
- the direction in which the substrate is separated from the cup may have a component at least in a vertical direction with respect to a plane on which the adhesive tape adhering to the cup is disposed.
- the direction may be an oblique direction having a vertical component in a separation direction.
- the control device may control the second movement unit to move the second holding unit and to move the cup in the direction away from the substrate, thereby separating the adhesive tape from the substrate.
- the direction in which the cup is separated from the substrate may have a component at least in the vertical direction with respect to the plane on which the adhesive tape is disposed of the substrate.
- the direction may be an oblique direction having the vertical component in the separation direction.
- the control device may control both the substrate movement unit and the second movement unit to move both the substrate and the second holding unit.
- the control device controls both the substrate movement unit and the second movement unit, and moves the cup held by the second holding unit and the substrate in a direction to be separated from each other to thereby change the positional relationship between the cup and the substrate. In this manner, the adhesive tape adhering to the cup can be more smoothly separated from the substrate.
- the control device controls the second movement unit to move the cup in a direction along the plane on which the adhesive tape is disposed, and controls the substrate movement unit so that the substrate is moved in synchronization with the movement of the cup in a direction away from the plane on which the adhesive tape is disposed.
- the direction away from the plane on which the adhesive tape is disposed may have the component at least in the vertical direction with respect to the plane on which the adhesive tape is disposed.
- the direction may be an oblique direction having a vertical component in a separation direction.
- the control device may control the second movement unit to move the cup so that the substrate is gradually wound from a front direction in the direction along the plane on which the adhesive tape is disposed.
- the movement of the cup and the movement of the substrate may be synchronized at the same timing and at the same movement speed.
- the control device may control the substrate movement unit after the cup is held by the second holding unit.
- the control device may cause the substrate guide means to move the adhesive tape in the direction away from the plane on which the adhesive tape is disposed, and may control the second movement unit in synchronization with the movement of the substrate to move the second holding unit in the direction along the plane.
- the movement of the substrate and the movement of the second holding unit may be synchronized so that the movement speeds of the cup and the substrate are the same at a timing at which the movement of the cup by the second holding unit and the feeding movement of the substrate are the same. In this manner, the adhesive tape adhering to the cup can be more smoothly separated from the substrate.
- the control device may control the robot arm so that the adhesive tape adhering to the cup is separated from the substrate. Thereafter, the control device may cause the robot arm to transport the cup held by the holding portions, and may mount the transported cup on a cup holding portion (for example, a mounting portion 231) of a blocking arm. In this manner, restrictions on a positional relationship between the cup attachment device and the adhesive tape supply device are reduced, and both of these are more freely installed.
- the control device may control an operation of each device or each unit in cooperation with control means (for example, control units 139, 260, 360, 410, and 510) included in each device or each unit, or each control means of each device or each unit may be included in the control device.
- control means for example, control units 139, 260, 360, 410, and 510 included in each device or each unit, or each control means of each device or each unit may be included in the control device.
- the control device may be configured to include a plurality of control means.
- an eyeglasses lens processing system (for example, the eyeglasses lens processing system 2) includes an eyeglasses lens processing device (for example, an eyeglasses lens processing device 400), the cup attachment device, and the robot arm in addition to the adhesive tape sticking system.
- an eyeglasses lens processing device for example, an eyeglasses lens processing device 400
- the cup attachment device for example, an eyeglasses lens processing device 400
- the robot arm in addition to the adhesive tape sticking system.
- the holding portion of the robot arm is used as the first holding unit, and the robot arm is used as the first movement unit.
- the blocking arm of the cup attachment device is used as the second holding unit, and the movement means is used as the second movement unit.
- the control device controls the robot arm to transport the eyeglasses lens placed at a predetermined position, and installs the eyeglasses lens at a predetermined lens placement position of the cup attachment device.
- the control device controls the robot arm to cause the holding portion to hold the cup placed at the predetermined position, and applies the cup onto the adhesive tape moved to the first position.
- the control device controls the movement means to move the blocking arm, whereby the cup is attached via the adhesive tape to a refractive surface of the eyeglasses lens placed at the predetermined position.
- the control device controls the robot arm to cause the holding portion to hold and take out the eyeglasses lens together with the cup held by the blocking arm, and attaches the eyeglasses lens to a lens holding shaft of the eyeglasses lens processing device.
- the control device controls the robot arm, causes the holding portion to hold and take out the eyeglasses lens held by the lens holding shaft, and moves the processed eyeglasses lens at a predetermined position. In this manner, the processing can be more properly performed with a compact eyeglasses lens processing system.
- FIG. 1 is a view illustrating the adhesive tape sticking system 1 and the eyeglasses lens processing system 2 according to the embodiment.
- the adhesive tape sticking system 1 includes the robot arm 100, the cup attachment device (blocker) 200, and the adhesive tape supply device 300.
- the eyeglasses lens processing system 2 includes the eyeglasses lens processing device 400 in addition to the above-described members.
- the eyeglasses lens processing system 2 may include a tray transport device 500 for transporting a tray TR.
- a pair of right and left unprocessed eyeglasses lenses (hereinafter, referred to as a lens LE) are installed at a predetermined position on the tray TR.
- the cup CU (refer to FIG. 2 ) serving as a lens processing jig is installed at the predetermined position on the tray TR. For example, the cup CU is placed at each predetermined position of the right and left lenses LE. Then, the processed lens LE is returned to the tray TR.
- FIG. 2 is a view illustrating the cup CU and the adhesive tape TA.
- the cup CU is used as a processing jig for the lens LE.
- the adhesive tape TA is used to fix the cup CU to the refractive surface of the lens LE.
- the refractive surface of the lens LE to which the cup CU is fixed is generally a lens front surface, but may be a lens rear surface.
- the cup CU in the present embodiment includes a base portion 10 and a collar portion 11.
- the base portion 10 and the collar portion 11 are integrally formed of a resin.
- the base portion 10 is inserted into a cup holder 430 (refer to FIG. 3 ) included in a lens holding shaft 402L of the eyeglasses lens processing device 400.
- a key groove 10b extending in a horizontal direction is formed in an upper portion of the base portion 10 illustrated in FIG. 2 .
- the key groove 10b is used to establish a predetermined positional relationship between an astigmatic axis angle of the lens LE and the horizontal direction of the lens LE when the cup CU is attached to the lens LE and when a peripheral edge of the lens LE is processed.
- the base portion 10 has a cutout 10c which is an example of an index for determining a vertical direction of the lens LE (hereinafter, referred to as the vertical direction when a user wears eyeglasses).
- the collar portion 11 is formed in an elliptical shape having a diameter larger than that of the base portion 10.
- a longitudinal direction of the elliptical shape is the same as an extending direction of the key groove 10b.
- An uneven portion 11a is formed around the base portion 10 on an upper surface of the collar portion 11. The uneven portion 11a is used to reduce a rotational deviation when being inserted into the cup holder 430.
- a tip of the cup holder 430 has an uneven portion (not illustrated) into which the uneven portion 11a formed in the collar portion 11 is to be fitted.
- two hooks 12 are formed on both sides in the longitudinal direction on the upper surface of the collar portion 11.
- the hook 12 is formed at a position separated from the uneven portion 11a, a position which does not interfere with the uneven portion 11a even in a case where the base portion 10 is inserted into the cup holder 430 and the mounting portion 231 (refer to FIG. 5 ) of the cup attachment device 200.
- the two hooks 12 are used as members held by operator's fingers in a case where the cup CU attached to the lens LE via the adhesive tape TA is detached.
- the two hooks 12 may be used in a case where the holding portion 137 (refer to FIG. 4 ) of the robot arm 100 holds the cup CU.
- the adhesive tape TA is formed in the same outer shape as that of the lower surface of the collar portion 11 (may be formed in substantially the same shape).
- a base material of the adhesive tape TA is rubber.
- a thickness of the adhesive tape TA is approximately 1 mm. Both surfaces (upper surface and lower surface) of the adhesive tape TA are configured to have adhesiveness. The upper surface of the adhesive tape TA is adhered to the fixing surface (that is, the lower surface of the collar portion 11) of the cup CU, and the lower surface of the adhesive tape TA is adhered to the refractive surface of the lens LE. In this manner, the cup CU is fixed to the refractive surface of the lens LE via the adhesive tape TA.
- the adhesive tape TA may be provided with a tab 21a which partially protrudes from an outer periphery of the collar portion 11.
- the tab 21a is formed integrally with the base material of the adhesive tape TA. The tab 21a is used when the adhesive tape TA is detached from the lens LE and the cup CU. The cup CU can be reused by detaching the adhesive tape TA from the cup CU.
- FIG. 3 is a view for describing a schematic configuration of the eyeglasses lens processing device 400.
- the eyeglasses lens processing device 400 includes a lens holding shaft 402 (lens holding shafts 402L and 402R) for holding the lens LE, a processing tool 460 for processing the peripheral edge of the lens LE, a movement unit 450 for changing a relatively positional relationship between the lens LE held by the lens holding shaft 402 and the processing tool 460, and a control unit 410 for controlling the movement unit 450.
- the processing tool 460 includes at least one of a finishing tool 462 and a roughing tool 463 which are attached to a rotary shaft 461 and having a V-groove for bevel forming.
- the lens LE is held by a pair of lens holding shafts 402L and 402R.
- the cup holder 430 is attached to one of the lens holding shafts 402L, and the base portion 10 of the cup CU fixed to the lens LE is inserted into the cup holder 430.
- the cup holder 430 includes an insertion hole 431a having a key 431b formed.
- the key groove 10b formed in the base portion 10 of the cup CU is fitted into the key 431b so that the astigmatic axis angle of the lens LE and a reference direction of the lens holding shaft 402L have a constant relationship.
- the eyeglasses lens processing device 400 includes a lens holding mechanism 440 that moves the lens holding shaft 402R to the lens holding shaft 402L side, and the lens holding mechanism 440 is controlled by the control unit 410.
- JP2013-158866A An example of a detailed configuration of the eyeglasses lens processing device 400 is disclosed in JP2013-158866A , for example.
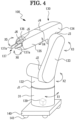
- FIG. 4 is a view illustrating an example of the robot arm 100.
- the robot arm 100 in the present embodiment includes the arm portion 130.
- the arm portion 130 has a plurality of joint portions, and can change a posture by rotating each portion via the joint portions.
- the arm portion 130 of the robot arm 100 in the present embodiment includes a base 131, a shoulder 132, a lower arm 133, a first upper arm 134, a second upper arm 135, a wrist 136, and a holding portion 137.
- FIG. 4 illustrates rotation axes X1 to X6 by illustrating directions around axes of the rotation axes X1 to X6, respectively.
- the base 131 supports the whole arm portion 130.
- the shoulder 132 is connected to an upper portion of the base 131 via a first joint portion J1.
- the shoulder 132 rotates with respect to the base 131 around the rotation axis X1 extending in a direction intersecting with a base 140 (vertical direction in the present embodiment).
- One end portion of the lower arm 133 is connected to a portion of the shoulder 132 via a second joint portion J2.
- the lower arm 133 rotates with respect to the shoulder 132 around the rotation axis X2 extending in the horizontal direction.
- the first upper arm 134 is connected via a third joint portion J3 to an end portion on a side opposite to the side connected to the shoulder 132 in the lower arm 133.
- the first upper arm 134 rotates with respect to the lower arm 133 around the rotation axis X3 extending in the horizontal direction.
- the second upper arm 135 is connected via a fourth joint portion J4 to a tip side (side provided with the holding portion 137) of the first upper arm 134.
- the second upper arm 135 rotates with respect to the first upper arm 134 around the rotation axis X4.
- the wrist 136 is connected to the tip side of the second upper arm 135 via a fifth joint portion J5.
- the wrist 136 rotates with respect to the second upper arm 135 around the rotation axis X5.
- the holding portion 137 is connected to the tip side of the wrist 136 via a sixth joint portion J6.
- the holding portion 137 rotates with respect to the wrist 136 around the rotation axis X6.
- the holding portion 137 has two fingers 137a.
- An object (cup CU, lens LE, or the like) is held by the two fingers 137a.
- a shape of the finger 137a is not particularly limited as long as a target object can be held.
- the arm portion 130 internally has a built-in motor for rotating each portion around each of the rotation axes X1 to X6.
- the wrist 136 internally has a built-in actuator for opening and closing the two fingers 137a.
- the arm portion 130 is fixed to the base 140.
- the base 140 is placed on a horizontal installation surface.
- the base 140 is provided with an arm movement portion 141 that moves the arm portion 130 in a direction parallel to the installation surface.
- the arm movement portion 141 is driven so that the whole arm portion 130 moves in parallel on the installation surface.
- a configuration of the arm movement portion 141 can be selected as appropriate.
- the arm movement portion 141 may include wheels and motors for rotating the wheels.
- a belt conveyor or the like may function as the arm movement portion.
- the base 140 (arm portion 130) may be fixed to the installation surface.
- the installation surface may be, for example, a wall surface extending in the vertical direction.
- the robot arm 100 in the present embodiment includes the control unit 139 that performs various controls (for example, control for a motor that rotates each portion and an actuator that drives the finger 137a).
- the robot arm 100 may include a detector (for example, an encoder) for detecting an angle of each portion of the arm portion 130 (for example, an angle of the shoulder 132 with respect to the base 131 and an angle of the lower arm 133 with respect to the shoulder 132). All angles of respective portions of the arm portion 130 are detected by the detector to determine a position of the holding portion 137 provided at the tip portion of the arm portion 130. Therefore, for example, even when an operator manually adjusts the angle of each portion of the arm portion 130 to move the holding portion 137 to a desired position, the control unit 139 of the robot arm 100 can detect a position of the moved holding portion 137 (for example, a position of the holding portion 137 with respect to the base 140). Examples of detailed configurations of the robot arms are disclosed in JP2021-58947A and JP2019-141970A , for example.
- FIG. 5 is a schematic configuration diagram of the cup attachment device 200.
- the cup attachment device 200 is used to attach the cup CU to the refractive surface (for example, a front surface) of the lens LE.
- the cup attachment device 200 relatively changes positions of the cup CU held by the blocking arm 232 and the lens LE supported by the lens support mechanism 210 to attach (fix) the cup CU to the refractive surface of the lens LE via the adhesive tape TA.
- the blocking arm 232 includes the mounting portion 231 for holding the cup CU.
- the mounting portion 231 is attached to the tip of the blocking arm 232.
- the mounting portion 231 has an insertion hole 231a into which the base portion 10 of the cup CU is inserted.
- the cup attachment device 200 includes the movement unit 230 that changes a relatively positional relationship between the cup CU held by the blocking arm 232 and the lens LE supported by the lens support mechanism 210.
- the movement unit 230 moves the blocking arm 232 toward the lens LE placed at a predetermined position (lens support unit 210 in the embodiment), whereby the movement unit 230 fixes the cup CU mounted on the mounting portion 231 to the refractive surface of the lens LE via the adhesive tape TA.
- the movement unit 230 includes an X-direction movement unit 235, a Y-direction movement unit 236 and a Z-direction movement unit 237.
- the blocking arm 232 is held by an arm holding base 233.
- the arm holding base 233 is moved in a Z-direction (front-back direction) in FIG. 5 by the Z-direction movement unit 237.
- the Z-direction movement unit 237 is moved in a Y-direction (vertical direction) in FIG. 5 by the Y-direction movement unit 236.
- the Y-direction movement unit 236 is moved in an X-direction (horizontal direction orthogonal to the Y-direction and Z-direction) by the X-direction movement unit 235.
- the blocking arm 232 is three-dimensionally moved with respect to the lens LE supported by the lens support unit 210.
- the movement unit 230 may include a rotation unit 238 that rotates the cup CU around a cup attachment axis K2.
- the rotation unit 238 includes a motor 234.
- the mounting portion 231 is disposed to be rotatable around the cup attachment axis K2. Then, the mounting portion 231 is rotated around the axis K2 by the rotation of the motor 234 via a rotation transmission mechanism (not illustrated). In this manner, when the lens LE has an astigmatic axis (cylinder axis), an angle of the cup CU in a reference horizontal direction is changed, and the cup CU is attached to the lens LE in a form where the astigmatic axis matches lens prescriptions.
- the cup attachment device 200 includes a lens information acquisition unit 240 for acquiring information on the lens LE.
- the lens information acquisition unit 240 may serve as an optical system for acquiring optical characteristics of the lens LE (optical center position, astigmatic axis direction, lens power, and the like) as well as information on the lens LE which is different from the optical characteristics of the lens LE (for example, an outer shape of the lens LE, a position of a marking point assigned to the lens LE, a hidden mark formed on the lens LE, and the like).
- the lens information acquisition unit 240 includes an illumination optical system 241, a light receiving optical system 245, and an imaging optical system 248.
- the illumination optical system 241 includes a light source 242, a half mirror 243, and a concave mirror 244, and illuminates the lens LE along an optical axis L1.
- a retroreflective member 252 is disposed below the lens LE, and the lens LE is illuminated from behind the lens LE by a light flux reflected on the retroreflective member 252. The light flux reflected on the retroreflective member 252 is guided to the imaging optical system 248.
- the light receiving optical system 245 includes a target plate 246, an image sensor 247, and the like.
- the target plate 246 has an index in which a large number of openings (light flux passage ports) are formed in a predetermined pattern, and is used to detect the optical center of the lens LE, the astigmatic axis direction, and the like.
- the image sensor 247 captures an image of a measurement light flux that is emitted by the light source 242 to pass through the lens LE and the target plate 246. Based on a position of an index image captured by the image sensor 247, the optical center position of the lens LE, the astigmatic axis angle and the like are detected.
- the imaging optical system 248 includes a concave mirror 244 shared with the illumination optical system 241, a diaphragm (reference numeral omitted) disposed at a focal position of the concave mirror 244, an imaging lens (reference numeral omitted), an image sensor 251, and the like.
- the image sensor 251 captures an image of a reflection light flux reflected on the retroreflective member 252.
- a position of the marking point is detected by analyzing a lens image captured by the image sensor 251.
- the optical center position of the lens LE to which the marking point is assigned and the astigmatic axis direction are detected.
- an outer shape of the lens LE is acquired by analyzing the lens image captured by the image sensor 251.
- the cup attachment device 200 includes a control unit 260.
- the movement unit 230, the motor 234, and the lens information acquisition unit 240 are connected to the control unit 260.
- the control unit 260 controls these electrical components.
- the control unit 260 controls the lens information acquisition unit 240 to obtain various measurement information.
- An attachment position of the cup CU may be set at the optical center position of the lens LE, or may be set at a geometric center position of a target lens shape. As a matter of course, the attachment position may be set to be attached at a position different from the above-described positions.
- FIG. 6 is a view illustrating a schematic configuration of the adhesive tape supply device 300.
- the adhesive tape supply device 300 includes a substrate movement unit 310 that functions as a first actuator.
- the substrate movement unit 310 is used to move the lower mount 30 which is an example of a substrate on which the adhesive tape TA is adhered to be disposed.
- a plurality of the adhesive tapes TA are adhered to be disposed and aligned at a constant interval on the lower mount 30.
- the adhesive tapes TA are aligned in one line on the lower mount 30.
- an upper mount 31 is provided on the adhesive tape TA disposed on the lower mount 30 to cover the adhesive tape TA. That is, the adhesive tape TA is disposed to be pinched between the lower mount 30 and the upper mount 31.
- the upper mount 31 is an example of a protector that protects an adhesive surface of the upper surface of the adhesive tape TA.
- An integrated tape 32 in which the lower mount 30 and the upper mount 31 are integrated across the adhesive tape TA is loaded into the adhesive tape supply device 300 in a wound state.
- the adhesiveness of the upper mount 31 with respect to the upper surface of the adhesive tape TA is weaker than the adhesiveness of the lower mount 30 with respect to the adhesive tape TA. In this manner, the upper mount 31 is first detached from the integrated tape 32 in a state where the adhesive tape TA remains on the lower mount 30.
- the adhesiveness of the upper mount 31 with respect to the upper surface of the adhesive tape TA may be the same (including substantially the same). Even in this case, the upper mount 31 can be gradually detached from the integrated tape 32 by giving a movement trigger in a direction in which the upper mount 31 is separated from the adhesive tape TA.
- the adhesiveness of the lower mount 30 with respect to the adhesive tape TA is weaker than the adhesiveness of the adhesive tape TA with respect to the cup CU.
- the lower mount 30 is moved in a direction away from the adhesive tape TA so that the lower mount 30 is allowed to be easily detached.
- the adhesiveness of the lower mount 30 with respect to the adhesive tape TA may be the same (including substantially the same). Even in this case, the movement trigger is given in a direction in which the lower mount 30 is separated from the adhesive tape TA. In this manner, the lower mount 30 can be gradually separated from the adhesive tape TA while the adhesive tape TA is bonded to the cup CU.
- the substrate movement unit 310 includes two timing pulleys 312 and 314, a belt (timing belt) 316 stretched over the two timing pulleys 312 and 314, and a motor 318 for rotating the timing pulley 312.
- the lower mount 30 is placed on the belt 316.
- the belt 316 is moved in a feeding direction by the motor 318.
- the adhesive tape supply device 300 may include a protector detachment unit 330 that functions as a second actuator.
- the protector detachment unit 330 is used to detach the upper mount 31 from the integrated tape 32 (that is, the upper surface of the adhesive tape TA).
- the protector detachment unit 330 is disposed on the substrate movement unit 310.
- the protector detachment unit 330 includes two timing pulleys 332 and 334, a belt (timing belt) 336 stretched over the two timing pulleys 312 and 314, and a motor 338 for rotating the timing pulley 332.
- the integrated tape 32 is disposed to be pinched between the belt 316 of the substrate movement unit 310 and the belt 336 of the protector detachment unit 330.
- the protector detachment unit 330 may include an upper mount guide mechanism 340.
- the upper mount guide mechanism 340 guides the movement of the upper mount 31 in a direction away from a plane on which the adhesive tape TA is disposed (upward direction in the embodiment in FIG. 6 ).
- the upper mount guide mechanism 340 includes a timing pulley 334 for moving the belt 336 in the upward direction, and a roller 342 disposed in the upper portion of the timing pulley 334.
- the roller 342 is disposed to press the belt 336 in a state where the upper mount 31 is pinched between the roller 342 and the belt 336. Then, the roller 342 is rotated in synchronization with the movement of the belt 336 so that the upper mount 31 detached from the adhesive tape TA is guided in the upward direction.
- the upper mount 31 is discarded in a collection container (not illustrated).
- the substrate movement unit 310 may include a lower mount guide mechanism 320.
- the lower mount guide mechanism 320 guides the movement of the lower mount 30 in a direction away from the plane on which the adhesive tape TA is disposed (downward direction in the embodiment in FIG. 6 ).
- the lower mount guide mechanism 320 includes a timing pulley 314 for moving the belt 316 in the downward direction and a roller 322 disposed in a lower portion of the timing pulley 314.
- the roller 322 is disposed to press the belt 316 in a state where the lower mount 30 is pinched between the roller 322 and the belt 316.
- the roller 322 is rotated in synchronization with the movement of the belt 316 so that the lower mount 30 is guided in a direction away from the adhesive tape TA (downward direction in the embodiment). Specifically, the lower mount 30 is moved in the downward direction together with the belt 316 along an arc of the timing pulley 314. The lower mount 30 guided in the downward direction is discarded in a collection container (not illustrated).
- the adhesive tape supply device 300 may include an object sensor 350 which is an example of object detection means for detecting the presence of an object.
- the object sensor 350 is disposed to detect the adhesive tape TA on the lower mount 30 moved by the belt 316 after the upper mount 31 is detached by the protector detachment unit 330.
- a disposition position thereof is not particularly limited.
- the adhesive tape supply device 300 has a control unit 360.
- a motor 318, a motor 338, and the object sensor 350 are connected to the control unit 360.
- the control unit 360 controls driving of the motors 318 and 338, based on a detection result of the object sensor 350.
- FIG. 8 is a view illustrating a control device of the whole eyeglasses lens processing system 2.
- the adhesive tape sticking system 1 includes a control device 600 for controlling the whole system.
- the control device 600 is connected to the control unit 139 of the robot arm 100, the control unit 260 of the cup attachment device 200, and the control unit 360 of the adhesive tape supply device 300.
- the control device 600 also serves as a control device for the whole eyeglasses lens processing system 2, and is also connected to the control unit 410 of the eyeglasses lens processing device 400 and the control unit 510 of the tray transport device 500.
- the connection to the control device 600 is not limited to wired connection, and may be communicably connected by wireless.
- the control device 600 cooperates with the control units (139, 260, 360, 410, and 510) of each device forming the adhesive tape sticking system 1 and the eyeglasses lens processing system 2 to control an operation of each device.
- the control unit of each device may be included in the control device 600.
- the control device 600 is connected to an operation unit 612 and a display unit 614.
- a host computer 650 is communicably connected to the control device 600.
- the host computer 650 is connected to a database, and manages lens processing information required for processing the peripheral edge of the lens LE.
- the control device 600 acquires the lens processing information on the lens LE placed in the tray TR via the host computer 650.
- the lens processing information includes at least one of a target lens shape for processing the peripheral edge of the lens LE, layout data (positional relationship data of the optical center of the lens LE with respect to the target lens shape), prescription data of the lens LE (astigmatic axis angle, prescription power of minus power or plus power, and the like).
- FIG. 9A is a view for showing an operation for attaching the cup CU to the adhesive tape TA.
- FIG. 9B is a view for showing an operation for separating the adhesive tape TA stuck on the cup CU from the lower mount 30.
- the control device 600 controls the adhesive tape supply device 300 to prepare for sticking the adhesive tape TA on the fixing surface of the cup CU.
- the control device 600 controls the substrate movement unit 310 to move the lower mount 30 in a predetermined feeding direction, thereby moving the adhesive tape TA to a first position P1 (position where the cup CU is placed).
- the substrate movement unit 310 and the protector detachment unit 330 are synchronously driven, and the belt 316 and the belt 336 are moved at the same speed in a feeding direction (in a direction indicated by an arrow A in FIG. 9A ). In this manner, the integrated tape 32 is moved in the feeding direction.
- the roller 342 is synchronously rotated in response to the movement of the belt 336
- the upper mount 31 located between the roller 342 and the belt 336 is guided in the upward direction by the upper mount guide mechanism 340.
- the belt 316 extends to be long in the feeding direction from the position of the belt 336, and the lower mount 30 placed on the belt 336 is guided and pulled in the downward direction by the lower mount guide mechanism 320.
- the upper mount 31 is first detached from the adhesive tape TA.
- a position of the adhesive tape TA from which the upper mount 31 is detached is detected by the object sensor 350, and is moved to the first position P1, based on detection information thereof.
- the movement of the lower mount 30 (movement of the belt 316) is stopped, and the adhesive tape TA is brought into a standby state.
- the control device 600 acquires the lens processing information (prescription data including target lens shape, layout data, and astigmatic axis angle) of the lens LE.
- a work sheet for a pair of right and left lenses LE is attached to the tray TR.
- a barcode is attached to the work sheet, and the barcode is read by a barcode reader (not illustrated).
- the read barcode is transmitted to host computer 650.
- the host computer 650 reads the lens processing information stored in association with the barcode from the database, and transmits the lens processing information to the control device 600. In this manner, the control device 600 acquires the lens processing information on the pair of right and left lenses LE.
- the control device 600 controls the robot arm 100 to install the lens LE at a predetermined position in the cup attachment device 200.
- the arm portion 130 and the holding portion 137 are driven by the control unit 139 receiving a control command from the control device 600, and the lens LE (one of the pair of right and left eyeglasses lenses) placed at the predetermined position in the tray TR is transported after being held by the holding portion 137.
- the lens LE is installed in the lens support mechanism 210 of the cup attachment device 200.
- the control device 600 controls the robot arm 100 to cause the holding portion 137 to hold the cup CU, and moves the holding portion 137 in a state where the holding portion 137 holds the cup CU, whereby the cup CU is applied onto the adhesive tape TA.
- the arm portion 130 and the holding portion 137 are driven by the control unit 139 receiving a control command from the control device 600, and the holding portion 137 holds the cup CU placed at a predetermined position on the tray TR.
- the cup CU is held by the holding portion 137 in such a manner that both side edges in the longitudinal direction of the collar portion 11 in the cup CU are pinched between the two fingers 137a.
- the hooks 12 on both sides in the cup CU may be held by the two fingers 137a.
- the holding portion 137 In a state where the cup CU is held by the holding portion 137, the holding portion 137 is moved by an operation of the arm portion 130. As illustrated in FIG. 9A , the cup CU is placed on the adhesive tape TA located at the first position P 1, whereby the cup CU is applied onto the adhesive tape TA. At this time, a rotation angle of the holding portion 137 around the rotation axis X6 is controlled so that the longitudinal direction of the collar portion 11 of the cup CU coincides with the longitudinal direction of the adhesive tape TA.
- the control device 600 controls the cup attachment device 200 to cause the blocking arm 232 to hold the cup CU adhering to the adhesive tape TA.
- the control unit 360 receiving a control command from the control device 600 controls the driving of the substrate movement unit 310, and the cup CU applied onto the lower mount 30 and the adhesive tape TA is moved to a second position P2 when being held by the blocking arm 232.
- the cup CU is moved from the first position P1 to the second position P2 so that the cup CU is easily held by the blocking arm 232.
- a mechanism for moving the blocking arm 232 does not need to increase in size.
- the cup CU may be held at the first position P1 by the blocking arm 232 without moving the lower mount 30 and the cup CU to the second position P2.
- the driving of the movement unit 230 is controlled by the control unit 260 receiving a control command from the control device 600, and the blocking arm 232 is lowered after the mounting portion 231 of the blocking arm 232 is moved onto the cup CU located at the second position P2.
- the base portion 10 of the cup CU is inserted into the insertion hole 231a of the mounting portion 231.
- the insertion hole 231a of the mounting portion 231 has a built-in plunger for applying a load for holding the cup CU.
- the cup CU is held by the blocking arm 232 via the mounting portion 231.
- the control device 600 controls both the movement unit 230 of the cup attachment device 200 and the substrate movement unit 310 of the adhesive tape supply device 300 to change a positional relationship between the cup CU held by the blocking arm 232 and the lower mount 30, whereby the adhesive tape TA adhering to the cup CU is separated from the lower mount 30.
- the substrate movement unit 310 and the movement unit 230 of the cup attachment device 200 are driven by the control unit 260 and the control unit 360 which receive the control command from the control device 600.
- the lower mount 30 that is, the belt 316
- the blocking arm 232 is also moved in the feeding direction in synchronization with this movement (that is, moved at the same speed).
- the lower mount guide mechanism 320 guides and gradually moves the lower mount 30 in a direction away from the plane on which the adhesive tape TA is disposed (vertical direction with respect to the plane on which the adhesive tape TA is disposed, the downward direction in the embodiment), whereby the lower mount 30 is detached from the adhesive tape TA adhering to the cup CU. More specifically, in synchronization with the movement of the cup CU held by the blocking arm 232 in the feeding direction, the lower mount 30 is moved in the downward direction together with the belt 316 along an arc of the timing pulley 314 (that is, guided by the lower mount guide mechanism 320), whereby the lower mount 30 is moved to be gradually wound from the front direction in the feeding direction of the lower mount 30.
- the lower mount guide mechanism 320 gradually moves the lower mount 30 in the direction away from the installation plane of the adhesive tape TA (may have a component at least in the vertical direction with respect to the installation plane of the adhesive tape TA), whereby the lower mount 30 is more smoothly separated (detached) from the adhesive tape TA.
- the control device 600 controls the movement unit 230 of the cup attachment device 200 to fix the cup CU to the refractive surface of the lens LE placed at a predetermined position via the adhesive tape TA.
- the control unit 260 receiving the control command from the control device 600 first controls the lens information acquisition unit 240 to obtain information on the optical characteristics of the lens LE, and the like. For example, in a case where the lens LE is a single focus lens, the optical characteristics of the optical center position and the astigmatic axis angle of the lens LE are obtained, based on a position of an index image captured by the image sensor 247 of the light receiving optical system 245.
- a position of the marking point may be detected by analyzing a lens image captured by the image sensor 251 of the imaging optical system 248, and the optical characteristics of the optical center position and the astigmatic axis angle of the lens LE may be obtained, based on a detection result thereof.
- control unit 260 receiving the control command from the control device 600 acquires the lens processing information on the lens LE (target lens shape, layout data, astigmatic axis angle of prescription data).
- the driving of the movement unit 230 is controlled based on the information, and the blocking arm 232 is moved toward the lens LE placed on the lens support unit 210 so that the cup CU is attached to the refractive surface of the lens LE.
- the cup CU is attached to a geometric center position of the target lens shape.
- the geometric center position of the target lens shape is obtained from the obtained optical center position of the lens LE and layout data.
- the attachment position of the cup CU may be set at the optical center position of the lens LE.
- the mounting portion 231 is rotated around the axis K2, based on the acquired astigmatic axis angle and prescription data, and the astigmatic axis angle of the lens LE and the reference direction of the cup CU have a constant relationship.
- the blocking arm 232 When the cup CU is completely attached to the lens LE, the blocking arm 232 is moved to a predetermined standby position after being raised. At this time, since the cup CU is in a state of being held by the blocking arm 232, the lens LE to which the cup CU is fixed is lifted and moved together with the cup CU.
- the control device 600 controls the robot arm 100 to take out the lens LE together with the cup CU held by the blocking arm 232, and transports and attaches the lens LE to the lens holding shaft 402 of the eyeglasses lens processing device 400.
- the control unit 139 receiving the control command from the control device 600 drives the arm portion 130 and the holding portion 137.
- the holding portion 137 holds the cup CU or the lens LE (in the embodiment, an edge of the collar portion 11 in the cup CU is gripped by the two fingers 137a of the holding portion 137), and the holding portion 137 is lowered.
- the base portion 10 of the cup CU is extracted from the mounting portion 231, and the lens LE including the cup CU is removed.
- the cup CU including the lens LE is attached to the lens holding shaft 402L of the eyeglasses lens processing device 400 by the movement of the arm portion 130.
- the control device 600 controls the eyeglasses lens processing device 400 so that the peripheral edge of the lens LE held by the lens holding shaft 402 is processed by the processing tool 460.
- the control unit 410 receiving the control command from the control device 600 controls the lens holding mechanism 440 to move the lens holding shaft 402R to the lens holding shaft 402L side, whereby the lens LE is held by the lens holding shaft 402.
- driving of the movement unit 450 is controlled based on processing data so that the peripheral edge of the lens LE is processed by the processing tool 460.
- the control device 600 controls the robot arm 100 to cause the holding portion 137 to hold the lens LE processed by the eyeglasses lens processing device 400, and take out the lens LE from the lens holding shaft 402L. Thereafter, the control device 600 controls the robot arm 100 to return the processed lens LE held by the holding portion 137 to the tray TR.
- the other unprocessed lens LE placed in the tray TR is also processed by performing the same operation, and the processed lens LE is returned to the tray TR.
- the control device 600 may control at least one of the substrate movement unit 310 and the movement unit 230 of the cup attachment device 200 to change a positional relationship between the cup CU held by the blocking arm 232 (second holding unit) and the lower mount 30 (substrate), whereby the adhesive tape TA adhering to the cup CU may be separated from the lower mount 30.
- control device 600 may control the movement unit 230 to move the cup CU in the direction away from the lower mount 30, whereby the adhesive tape TA may be separated from the lower mount 30.
- the direction away from the lower mount 30 can be the vertical direction with respect to the plane on which the adhesive tape TA is disposed in the lower mount 30.
- the movement unit 230 may be driven to move the cup CU held by the blocking arm 232 in the upward direction which is an example of the separation direction.
- the lower mount 30 Since the lower mount 30 is pressed against the belt 316 by the lower mount guide mechanism 320, the lower mount 30 does not follow the movement in the upward direction of the adhesive tape TA adhering to the cup CU, and the lower mount 30 is detached from the adhesive tape TA.
- the adhesiveness of the lower mount 30 with respect to the adhesive tape TA may be weaker than the adhesiveness of the adhesive tape TA with respect to the cup CU.
- control device 600 may control the substrate movement unit 310 to move the lower mount 30 in the direction away from the cup CU held by the blocking arm 232 (for example, a direction having at least vertical component with respect to the plane on which the adhesive tape TA adhering to the cup CU is disposed).
- the lower mount 30 may be moved to be gradually wound from the front direction in the feeding direction of the lower mount 30.
- the cup CU in the case where the cup CU is held by the blocking arm 232, the cup CU is moved to the second position P2.
- the cup CU may remain at the first position P1 when the cup CU is applied onto the adhesive tape TA by the robot arm 100.
- the blocking arm 232 is moved to cause the blocking arm 232 to hold the cup CU.
- the blocking arm 232 may be configured to be movable to the first position P1 with respect to an installation position of the cup attachment device 200.
- the blocking arm 232 which is an example of the second holding unit is used.
- the holding portion 137 of the robot arm 100 which is an example of the first holding unit may be used as the second holding unit.
- the robot arm 100 is shared to be also used as the second movement unit for moving the second holding unit that holds the cup CU.
- the adhesive tape TA adhering to the cup CU is efficiently separated from the lower mount 30 by moving the robot arm 100 instead of moving the blocking arm 232.
- the robot arm 100 may hold and transport the cup CU to which the adhesive tape TA is adhered, and the cup CU may be mounted on the mounting portion 231 included in the blocking arm 232 of the cup attachment device 200. In this manner, restrictions on the positional relationship between the cup attachment device 200 and the adhesive tape supplying device 300 are reduced, and both of these are more freely installed.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Ceramic Engineering (AREA)
- Inorganic Chemistry (AREA)
- Grinding And Polishing Of Tertiary Curved Surfaces And Surfaces With Complex Shapes (AREA)
- Manipulator (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
Abstract
Description
- The present disclosure relates to an adhesive tape sticking system that sticks an adhesive tape on a cup serving as a processing jig for an eyeglasses lens, and an eyeglasses lens processing system including the adhesive tape sticking system.
- Various techniques have been proposed for processing a peripheral edge of an eyeglasses lens. For example,
JP2021-058947A - Incidentally, in a case where a cup serving as a processing jig for an eyeglasses lens is attached to a refractive surface of the eyeglasses lens by a cup attachment device, it is necessary to perform a step of sticking an adhesive tape (leap tape) on a fixing surface of the cup. A system disclosed in
JP2021-058947A - A technical object of the present disclosure is to provide an adhesive tape sticking system which can automatically stick an adhesive tape to a cup, and an eyeglasses lens processing system including the adhesive tape sticking system.
- (1) An adhesive tape sticking system that sticks an adhesive tape, which is used for fixing a cup serving as a processing jig of an eyeglasses lens to a refractive surface of the eyeglasses lens, on a fixing surface of the cup, the adhesive tape sticking system including:
- a substrate movement unit that moves a substrate on which the adhesive tape is adhered to be disposed;
- a first movement unit that moves a first holding unit configured to hold the cup;
- a second movement unit that moves a second holding unit configured to hold the cup; and
- a control device configured to:
- control the substrate movement unit to move the adhesive tape to a first position by moving the substrate in a predetermined feeding direction;
- control the first movement unit to cause the first holding unit to hold the cup, and to apply the cup onto the adhesive tape by moving the first holding unit in a state where the cup is held by the first holding unit after the adhesive tape is moved to the first position;
- control the second movement unit, after the cup is applied onto the adhesive tape, to cause the second holding unit to hold the cup adhering to the adhesive tape; and
- control at least one of the substrate movement unit and the second movement unit, after the cup is held by the second holding unit, to separate the adhesive tape stuck on the cup from the substrate by changing a positional relationship between the cup held by the second holding unit and the substrate.
- (2) The adhesive tape sticking system according to the above-described (1),
in which the control device is configured to control both the substrate movement unit and the second movement unit when the adhesive tape is separated from the substrate. - (3) The adhesive tape sticking system according to the above-described (1) or (2),
in which the substrate movement unit includes a substrate guide means that guides a movement of the substrate in a direction away from a plane on which the adhesive tape is disposed. - (4) The adhesive tape sticking system according to the above-described (3),
in which the control device is configured to:- control the substrate movement unit, after the cup is held by the second holding unit, to move the substrate in the direction away from the plane by the substrate guide means; and
- control the second movement unit in synchronization with the movement of the substrate to separate the adhesive tape stuck on the cup from the substrate by moving the second holding unit in a direction along the plane.
- (5) The adhesive tape sticking system according to any one of the above-described (1) to (4), further including:
- a cup attachment device that has a blocking arm for holding the cup, and attaches the cup to the eyeglasses lens, the cup attachment device attaching the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position,
- in which the blocking arm is used as the second holding unit.
- (6) The adhesive tape sticking system according to any one of the above-described (1) to (4),
in which the second holding unit is shared to be used as the first holding unit, and the second movement unit is shared to be used as the first movement unit. - (7) The adhesive tape sticking system according to any one of the above-described (1) to (6),
- in which the first movement unit has a robot arm including an arm portion having a plurality of joint portions and a holding portion provided at the arm portion to hold and release an object, the robot arm moving the object held by the holding portion by rotating the arm portion via the joint portions, and
- the holding portion is used as the first holding unit.
- (8) The adhesive tape sticking system according to any one of the above-described (1) to (4), further including:
- a cup attachment device that has a blocking arm for holding the cup, and attaches the cup to the eyeglasses lens, the cup attachment device attaching the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position,
- in which the first movement unit is shared to be used as the second movement unit, and has a robot arm including an arm portion having a plurality of joint portions and a holding portion provided at the arm portion to hold and release an object, the robot arm moving the object held by the holding portion by rotating the arm portion via the joint portions,
- the holding portion is used as the first holding unit and the second holding unit, and
- the control device is configured to control the robot arm to mount the cup adhering to the adhesive tape on a cup holding portion of the blocking arm.
- (9) An eyeglasses lens processing system that includes the adhesive tape sticking system according to any one of the above-described (1) to (4) and processes a peripheral edge of an eyeglasses lens, the eyeglasses lens processing system including:
- an eyeglasses lens processing device that causes a processing tool to process the peripheral edge of the eyeglasses lens held by a lens holding shaft;
- a cup attachment device that has a blocking arm for holding the cup and a movement means for changing a relatively positional relationship between the cup held by the blocking arm and the eyeglasses lens supported by a lens support mechanism, the cup attachment device attaching the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position; and
- a robot arm that includes an arm portion having a plurality of joint portions and a holding portion provided at the arm portion to hold and release an object, the robot arm moving the object held by the holding portion by rotating the arm portion via the joint portions,
- in which the holding portion of the robot arm is used as the first holding unit, and the robot arm is used as the first movement unit,
- the blocking arm of the cup attachment device is used as the second holding unit, and the movement means is used as the second movement unit,
- the control device is configured to:
- control the robot arm to transport the eyeglasses lens placed at a predetermined position and to dispose the eyeglasses lens at a predetermined lens placement position of the cup attachment device;
- control the robot arm to cause the holding portion to hold the cup placed at a predetermined position, and to apply the cup onto the adhesive tape moved to the first position;
- control the movement means, after the adhesive tape stuck on the cup held by the blocking arm is separated from the substrate, to attach the cup to the refractive surface of the eyeglasses lens placed at a predetermined position via the adhesive tape by moving the blocking arm;
- control the robot arm, after the cup is attached to the refractive surface of the eyeglasses lens, to cause the holding portion to hold and take out the eyeglasses lens together with the cup held by the blocking arm, and to attach the eyeglasses lens to the lens holding shaft of the eyeglasses lens processing device; and
- control the robot arm, after the eyeglasses lens is completely processed by the eyeglasses lens processing device, to cause the holding portion to hold and take out the eyeglasses lens held by the lens holding shaft, and to move the processed eyeglasses lens to a predetermined position.
-
-
FIG. 1 is a view illustrating an adhesive tape sticking system and an eyeglasses lens processing system according to an embodiment. -
FIG. 2 is a view for describing a cup and an adhesive tape. -
FIG. 3 is a view for describing a schematic configuration of an eyeglasses lens processing device. -
FIG. 4 is a view for describing an example of a robot arm. -
FIG. 5 is a schematic configuration diagram of a cup attachment device. -
FIG. 6 is a view for describing a schematic configuration of an adhesive tape supply device. -
FIG. 7 is a view illustrating an example in which a plurality of adhesive tapes are adhered to be disposed on a lower mount. -
FIG. 8 is a view illustrating a control device of the whole eyeglasses lens processing system. -
FIG. 9A is a view for showing an operation for applying the cup onto the adhesive tape. -
FIG. 9B is a view for showing an operation for separating the adhesive tape stuck on the cup from the lower mount. - Hereinafter, one typical embodiment will be described with reference to the drawings. Items classified with < > below can be used independently or in conjunction with each other.
- For example, in an adhesive tape sticking system (for example, an adhesive tape sticking system 1), an adhesive tape (for example, an adhesive tape TA) used for fixing a cup (for example, a cup CU) serving as a processing jig for an eyeglasses lens to a refractive surface of the eyeglasses lens is stuck on a fixing surface of the cup. For example, the adhesive tape sticking system includes a substrate movement unit (for example, an adhesive tape supply device 300), a first movement unit (for example, a robot arm 100), a second movement unit (for example, a movement unit 230 of a cup attachment device 200), and a control device (for example, a control device 600). For example, the adhesive tape sticking system includes a cup attachment device (for example, the cup attachment device 200) for attaching the cup to the eyeglasses lens.
- For example, the cup attachment device has a blocking arm (for example, a blocking arm 232) for holding the cup. For example, the cup attachment device attaches the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position. For example, the cup attachment device includes movement means (for example, a movement unit 230) for changing a relatively positional relationship between the cup held by the blocking arm and the eyeglasses lens supported by a lens support mechanism. For example, the cup attachment device may include lens information acquisition means (for example, the lens information acquisition unit 240) for obtaining information on the eyeglasses lens supported by the lens support mechanism (for example, optical characteristics such as an optical center position of the eyeglasses lens and a direction of an astigmatic axis, and position information on a marking point assigned to the eyeglasses lens).
- For example, the substrate movement unit moves a substrate (for example, a lower mount 30) on which the adhesive tape is adhered to disposed. For example, the substrate movement unit includes a belt (for example, a belt 316) on which the substrate is placed, and a drive source (for example, a motor 318) for moving the belt in a feeding direction. For example, the substrate movement unit may include substrate guide means (for example, a lower mount guide mechanism 320) for guiding movement of the substrate in a direction away from a plane on which the adhesive tape is disposed. The substrate guide means can easily detach the adhesive tape from the substrate by separating the substrate at least in a vertical direction from the plane on which the adhesive tape is disposed. For example, the direction may have a component at least in the vertical direction with respect to the plane on which the adhesive tape is disposed. For example, the direction may be an oblique direction having a vertical component in a separation direction.
- For example, adhesiveness of the substrate adhering to the adhesive tape is weaker than adhesiveness of the adhesive tape to the cup, or the same (including substantially the same case) as each other. In a case where the adhesiveness of the substrate adhering to the adhesive tape is weaker than the adhesiveness of the adhesive tape adhering to the cup, in a case where the adhesive tape is stuck on the cup, the adhesive tape is more smoothly separated from the substrate while the adhesive tape is bonded to the cup. Even in a case where the adhesiveness of the substrate adhering to the adhesive tape and the adhesiveness of the cup adhering to the adhesive tape are the same (including substantially the same case) as each other, a shearing force acts by giving a movement trigger in a direction in which the substrate is separated from the adhesive tape. The substrate can be gradually separated from the adhesive tape while the adhesive tape is bonded to the cup.
- For example, the first movement unit moves a first holding unit (for example, a holding portion 137) which can hold the cup. For example, the first movement unit includes a robot arm. For example, the robot arm has an arm portion (for example, arm portion 130) having a plurality of joint portions (for example, joint portions J1 to J6), and a holding portion (for example, a holding portion 137) provided at the arm portion to hold and release an object. Then, for example, the robot arm rotates the arm portion via the joint portion to move the object held by the holding portion. In this case, the holding portion is used as a first holding unit.
- For example, a second movement unit moves a second holding unit (for example, a blocking arm 232) which can hold the cup. For example, the second holding unit is a separate body from the second holding unit, and the second movement unit is configured to be a separate body from the first movement unit. For example, in the second holding unit, a blocking arm included in the cup attachment device is used. The cup is more efficiently attached to the eyeglasses lens by using the blocking arm as the second holding unit. The second holding unit may also serve as the first holding unit, and the second movement unit may also serve as the first movement unit. In this case, for example, the cup is held by the holding portion of the robot arm, and the holding portion is moved by the robot arm. Since the highly versatile robot arm is used as the second movement unit, restrictions on installation of the second movement unit are reduced.
- For example, the control device controls the substrate movement unit to move the substrate in a predetermined feeding direction. For example, the control device controls the first movement unit to move the first holding unit. For example, the control device controls the first movement unit to cause the first holding unit to hold an object (for example, the cup). For example, the control device controls the second movement unit to move the second holding unit. For example, the control device controls the second movement unit to cause the second holding unit to hold an object (for example, the cup).
- For example, the control device controls the substrate movement unit to move the substrate in the predetermined feeding direction, thereby moving the adhesive tape to a first position. For example, the control device controls the first movement unit to cause the first holding unit to hold the cup, and after the adhesive tape is moved to the first position, the control device moves the first holding unit in a state of holding the cup, whereby the cup is applied onto the adhesive tape. For example, after the cup is applied onto the adhesive tape, the control device controls the second movement unit to cause the second holding unit to hold the cup adhering to the adhesive tape.
- Then, for example, after the cup is held by the second holding unit, the control device controls at least one of the substrate movement unit and the second movement unit, and moves at least one of the first holding unit and the second holding unit to change a positional relationship between the cup held by the second holding unit and the substrate, whereby the adhesive tape stuck on the cup is separated from the substrate. In this manner, the adhesive tape can be automatically stuck on the cup. In addition, an economically inexpensive and compact system can be realized without complicating a configuration of the system.
- With regard to the control for changing the positional relationship between the cup and the substrate, for example, the control device may control the substrate movement unit to move the substrate in a direction away from the cup held by the second holding unit. For example, the direction in which the substrate is separated from the cup may have a component at least in a vertical direction with respect to a plane on which the adhesive tape adhering to the cup is disposed. For example, the direction may be an oblique direction having a vertical component in a separation direction. Alternatively, with regard to the control for changing the positional relationship between the cup and the substrate, for example, the control device may control the second movement unit to move the second holding unit and to move the cup in the direction away from the substrate, thereby separating the adhesive tape from the substrate. For example, the direction in which the cup is separated from the substrate may have a component at least in the vertical direction with respect to the plane on which the adhesive tape is disposed of the substrate. In this case, the direction may be an oblique direction having the vertical component in the separation direction.
- In addition, for example, when the adhesive tape is separated from the substrate, the control device may control both the substrate movement unit and the second movement unit to move both the substrate and the second holding unit. For example, the control device controls both the substrate movement unit and the second movement unit, and moves the cup held by the second holding unit and the substrate in a direction to be separated from each other to thereby change the positional relationship between the cup and the substrate. In this manner, the adhesive tape adhering to the cup can be more smoothly separated from the substrate. Specifically, for example, the control device controls the second movement unit to move the cup in a direction along the plane on which the adhesive tape is disposed, and controls the substrate movement unit so that the substrate is moved in synchronization with the movement of the cup in a direction away from the plane on which the adhesive tape is disposed. For example, the direction away from the plane on which the adhesive tape is disposed may have the component at least in the vertical direction with respect to the plane on which the adhesive tape is disposed. For example, the direction may be an oblique direction having a vertical component in a separation direction. In this case, for example, the control device may control the second movement unit to move the cup so that the substrate is gradually wound from a front direction in the direction along the plane on which the adhesive tape is disposed. In this case, for example, the movement of the cup and the movement of the substrate may be synchronized at the same timing and at the same movement speed.
- In addition, for example, in a case where the substrate movement unit includes substrate guide means, the control device may control the substrate movement unit after the cup is held by the second holding unit. The control device may cause the substrate guide means to move the adhesive tape in the direction away from the plane on which the adhesive tape is disposed, and may control the second movement unit in synchronization with the movement of the substrate to move the second holding unit in the direction along the plane. In this case, for example, the movement of the substrate and the movement of the second holding unit may be synchronized so that the movement speeds of the cup and the substrate are the same at a timing at which the movement of the cup by the second holding unit and the feeding movement of the substrate are the same. In this manner, the adhesive tape adhering to the cup can be more smoothly separated from the substrate.
- For example, in a case where the adhesive tape sticking system includes a cup attachment device, the first movement unit includes a robot arm, and holding portions of the robot arm are used as the first holding unit and the second holding unit, the control device may control the robot arm so that the adhesive tape adhering to the cup is separated from the substrate. Thereafter, the control device may cause the robot arm to transport the cup held by the holding portions, and may mount the transported cup on a cup holding portion (for example, a mounting portion 231) of a blocking arm. In this manner, restrictions on a positional relationship between the cup attachment device and the adhesive tape supply device are reduced, and both of these are more freely installed.
- The control device may control an operation of each device or each unit in cooperation with control means (for example,
control units - For example, an eyeglasses lens processing system (for example, the eyeglasses lens processing system 2) includes an eyeglasses lens processing device (for example, an eyeglasses lens processing device 400), the cup attachment device, and the robot arm in addition to the adhesive tape sticking system.
- For example, the holding portion of the robot arm is used as the first holding unit, and the robot arm is used as the first movement unit. In addition, for example, the blocking arm of the cup attachment device is used as the second holding unit, and the movement means is used as the second movement unit.
- Then, for example, the control device controls the robot arm to transport the eyeglasses lens placed at a predetermined position, and installs the eyeglasses lens at a predetermined lens placement position of the cup attachment device. In addition, for example, the control device controls the robot arm to cause the holding portion to hold the cup placed at the predetermined position, and applies the cup onto the adhesive tape moved to the first position. For example, after the adhesive tape adhering to the cup is separated from the substrate, the control device controls the movement means to move the blocking arm, whereby the cup is attached via the adhesive tape to a refractive surface of the eyeglasses lens placed at the predetermined position. After the cup is attached to the refractive surface of the eyeglasses lens, the control device controls the robot arm to cause the holding portion to hold and take out the eyeglasses lens together with the cup held by the blocking arm, and attaches the eyeglasses lens to a lens holding shaft of the eyeglasses lens processing device. After the eyeglasses lens is completely processed by the eyeglasses lens processing device, the control device controls the robot arm, causes the holding portion to hold and take out the eyeglasses lens held by the lens holding shaft, and moves the processed eyeglasses lens at a predetermined position. In this manner, the processing can be more properly performed with a compact eyeglasses lens processing system.
- One typical embodiment in the present disclosure will be described with reference to the drawings.
FIG. 1 is a view illustrating the adhesive tape sticking system 1 and the eyeglasseslens processing system 2 according to the embodiment. - In
FIG. 1 , the adhesive tape sticking system 1 includes therobot arm 100, the cup attachment device (blocker) 200, and the adhesivetape supply device 300. The eyeglasseslens processing system 2 includes the eyeglasseslens processing device 400 in addition to the above-described members. In addition, the eyeglasseslens processing system 2 may include atray transport device 500 for transporting a tray TR. A pair of right and left unprocessed eyeglasses lenses (hereinafter, referred to as a lens LE) are installed at a predetermined position on the tray TR. In addition, the cup CU (refer toFIG. 2 ) serving as a lens processing jig is installed at the predetermined position on the tray TR. For example, the cup CU is placed at each predetermined position of the right and left lenses LE. Then, the processed lens LE is returned to the tray TR. -
FIG. 2 is a view illustrating the cup CU and the adhesive tape TA. The cup CU is used as a processing jig for the lens LE. The adhesive tape TA is used to fix the cup CU to the refractive surface of the lens LE. The refractive surface of the lens LE to which the cup CU is fixed is generally a lens front surface, but may be a lens rear surface. - In
FIG. 2 , the cup CU in the present embodiment includes abase portion 10 and acollar portion 11. For example, thebase portion 10 and thecollar portion 11 are integrally formed of a resin. Thebase portion 10 is inserted into a cup holder 430 (refer toFIG. 3 ) included in alens holding shaft 402L of the eyeglasseslens processing device 400. Akey groove 10b extending in a horizontal direction is formed in an upper portion of thebase portion 10 illustrated inFIG. 2 . Thekey groove 10b is used to establish a predetermined positional relationship between an astigmatic axis angle of the lens LE and the horizontal direction of the lens LE when the cup CU is attached to the lens LE and when a peripheral edge of the lens LE is processed. In addition, thebase portion 10 has acutout 10c which is an example of an index for determining a vertical direction of the lens LE (hereinafter, referred to as the vertical direction when a user wears eyeglasses). - The
collar portion 11 is formed in an elliptical shape having a diameter larger than that of thebase portion 10. A longitudinal direction of the elliptical shape is the same as an extending direction of thekey groove 10b. Anuneven portion 11a is formed around thebase portion 10 on an upper surface of thecollar portion 11. Theuneven portion 11a is used to reduce a rotational deviation when being inserted into the cup holder 430. A tip of the cup holder 430 has an uneven portion (not illustrated) into which theuneven portion 11a formed in thecollar portion 11 is to be fitted. - In addition, two
hooks 12 are formed on both sides in the longitudinal direction on the upper surface of thecollar portion 11. Thehook 12 is formed at a position separated from theuneven portion 11a, a position which does not interfere with theuneven portion 11a even in a case where thebase portion 10 is inserted into the cup holder 430 and the mounting portion 231 (refer toFIG. 5 ) of thecup attachment device 200. For example, the twohooks 12 are used as members held by operator's fingers in a case where the cup CU attached to the lens LE via the adhesive tape TA is detached. In addition, the twohooks 12 may be used in a case where the holding portion 137 (refer toFIG. 4 ) of therobot arm 100 holds the cup CU. - In
FIG. 2 , the adhesive tape TA is formed in the same outer shape as that of the lower surface of the collar portion 11 (may be formed in substantially the same shape). For example, a base material of the adhesive tape TA is rubber. In addition, for example, a thickness of the adhesive tape TA is approximately 1 mm. Both surfaces (upper surface and lower surface) of the adhesive tape TA are configured to have adhesiveness. The upper surface of the adhesive tape TA is adhered to the fixing surface (that is, the lower surface of the collar portion 11) of the cup CU, and the lower surface of the adhesive tape TA is adhered to the refractive surface of the lens LE. In this manner, the cup CU is fixed to the refractive surface of the lens LE via the adhesive tape TA. - The adhesive tape TA may be provided with a
tab 21a which partially protrudes from an outer periphery of thecollar portion 11. For example, thetab 21a is formed integrally with the base material of the adhesive tape TA. Thetab 21a is used when the adhesive tape TA is detached from the lens LE and the cup CU. The cup CU can be reused by detaching the adhesive tape TA from the cup CU. -
FIG. 3 is a view for describing a schematic configuration of the eyeglasseslens processing device 400. The eyeglasseslens processing device 400 includes a lens holding shaft 402 (lens holding shafts processing tool 460 for processing the peripheral edge of the lens LE, amovement unit 450 for changing a relatively positional relationship between the lens LE held by the lens holding shaft 402 and theprocessing tool 460, and acontrol unit 410 for controlling themovement unit 450. For example, theprocessing tool 460 includes at least one of afinishing tool 462 and aroughing tool 463 which are attached to arotary shaft 461 and having a V-groove for bevel forming. - The lens LE is held by a pair of
lens holding shafts lens holding shafts 402L, and thebase portion 10 of the cup CU fixed to the lens LE is inserted into the cup holder 430. The cup holder 430 includes an insertion hole 431a having a key 431b formed. Thekey groove 10b formed in thebase portion 10 of the cup CU is fitted into the key 431b so that the astigmatic axis angle of the lens LE and a reference direction of thelens holding shaft 402L have a constant relationship. After the cup CU is mounted on the cup holder 430, thelens holding shaft 402R is moved to the lens LE side, and the lens LE is pressed by alens presser 435 attached to thelens holding shaft 402R. In this manner, the lens LE is held by the lens holding shaft 402. The eyeglasseslens processing device 400 includes alens holding mechanism 440 that moves thelens holding shaft 402R to thelens holding shaft 402L side, and thelens holding mechanism 440 is controlled by thecontrol unit 410. - An example of a detailed configuration of the eyeglasses
lens processing device 400 is disclosed inJP2013-158866A -
FIG. 4 is a view illustrating an example of therobot arm 100. Therobot arm 100 in the present embodiment includes thearm portion 130. Thearm portion 130 has a plurality of joint portions, and can change a posture by rotating each portion via the joint portions. Specifically, thearm portion 130 of therobot arm 100 in the present embodiment includes a base 131, ashoulder 132, alower arm 133, a firstupper arm 134, a secondupper arm 135, awrist 136, and a holdingportion 137.FIG. 4 illustrates rotation axes X1 to X6 by illustrating directions around axes of the rotation axes X1 to X6, respectively. - The base 131 supports the
whole arm portion 130. Theshoulder 132 is connected to an upper portion of the base 131 via a first joint portion J1. Theshoulder 132 rotates with respect to the base 131 around the rotation axis X1 extending in a direction intersecting with a base 140 (vertical direction in the present embodiment). One end portion of thelower arm 133 is connected to a portion of theshoulder 132 via a second joint portion J2. Thelower arm 133 rotates with respect to theshoulder 132 around the rotation axis X2 extending in the horizontal direction. The firstupper arm 134 is connected via a third joint portion J3 to an end portion on a side opposite to the side connected to theshoulder 132 in thelower arm 133. The firstupper arm 134 rotates with respect to thelower arm 133 around the rotation axis X3 extending in the horizontal direction. The secondupper arm 135 is connected via a fourth joint portion J4 to a tip side (side provided with the holding portion 137) of the firstupper arm 134. The secondupper arm 135 rotates with respect to the firstupper arm 134 around the rotation axis X4. Thewrist 136 is connected to the tip side of the secondupper arm 135 via a fifth joint portion J5. Thewrist 136 rotates with respect to the secondupper arm 135 around the rotation axis X5. The holdingportion 137 is connected to the tip side of thewrist 136 via a sixth joint portion J6. The holdingportion 137 rotates with respect to thewrist 136 around the rotation axis X6. - For example, the holding
portion 137 has twofingers 137a. An object (cup CU, lens LE, or the like) is held by the twofingers 137a. A shape of thefinger 137a is not particularly limited as long as a target object can be held. - The
arm portion 130 internally has a built-in motor for rotating each portion around each of the rotation axes X1 to X6. In addition, thewrist 136 internally has a built-in actuator for opening and closing the twofingers 137a. - The
arm portion 130 is fixed to thebase 140. In the present embodiment, thebase 140 is placed on a horizontal installation surface. Thebase 140 is provided with an arm movement portion 141 that moves thearm portion 130 in a direction parallel to the installation surface. The arm movement portion 141 is driven so that thewhole arm portion 130 moves in parallel on the installation surface. A configuration of the arm movement portion 141 can be selected as appropriate. For example, the arm movement portion 141 may include wheels and motors for rotating the wheels. In addition, a belt conveyor or the like may function as the arm movement portion. In addition, the base 140 (arm portion 130) may be fixed to the installation surface. In this case, the installation surface may be, for example, a wall surface extending in the vertical direction. - The
robot arm 100 in the present embodiment includes thecontrol unit 139 that performs various controls (for example, control for a motor that rotates each portion and an actuator that drives thefinger 137a). - Furthermore, the
robot arm 100 may include a detector (for example, an encoder) for detecting an angle of each portion of the arm portion 130 (for example, an angle of theshoulder 132 with respect to the base 131 and an angle of thelower arm 133 with respect to the shoulder 132). All angles of respective portions of thearm portion 130 are detected by the detector to determine a position of the holdingportion 137 provided at the tip portion of thearm portion 130. Therefore, for example, even when an operator manually adjusts the angle of each portion of thearm portion 130 to move the holdingportion 137 to a desired position, thecontrol unit 139 of therobot arm 100 can detect a position of the moved holding portion 137 (for example, a position of the holdingportion 137 with respect to the base 140). Examples of detailed configurations of the robot arms are disclosed inJP2021-58947A JP2019-141970A -
FIG. 5 is a schematic configuration diagram of thecup attachment device 200. Thecup attachment device 200 is used to attach the cup CU to the refractive surface (for example, a front surface) of the lens LE. - The
cup attachment device 200 relatively changes positions of the cup CU held by the blockingarm 232 and the lens LE supported by thelens support mechanism 210 to attach (fix) the cup CU to the refractive surface of the lens LE via the adhesive tape TA. - The blocking
arm 232 includes the mountingportion 231 for holding the cup CU. The mountingportion 231 is attached to the tip of the blockingarm 232. The mountingportion 231 has aninsertion hole 231a into which thebase portion 10 of the cup CU is inserted. - The
cup attachment device 200 includes the movement unit 230 that changes a relatively positional relationship between the cup CU held by the blockingarm 232 and the lens LE supported by thelens support mechanism 210. In the embodiment, the movement unit 230 moves the blockingarm 232 toward the lens LE placed at a predetermined position (lens support unit 210 in the embodiment), whereby the movement unit 230 fixes the cup CU mounted on the mountingportion 231 to the refractive surface of the lens LE via the adhesive tape TA. The movement unit 230 includes anX-direction movement unit 235, a Y-direction movement unit 236 and a Z-direction movement unit 237. The blockingarm 232 is held by anarm holding base 233. Thearm holding base 233 is moved in a Z-direction (front-back direction) inFIG. 5 by the Z-direction movement unit 237. The Z-direction movement unit 237 is moved in a Y-direction (vertical direction) inFIG. 5 by the Y-direction movement unit 236. The Y-direction movement unit 236 is moved in an X-direction (horizontal direction orthogonal to the Y-direction and Z-direction) by theX-direction movement unit 235. In this manner, the blockingarm 232 is three-dimensionally moved with respect to the lens LE supported by thelens support unit 210. - In addition, the movement unit 230 may include a
rotation unit 238 that rotates the cup CU around a cup attachment axis K2. Therotation unit 238 includes amotor 234. The mountingportion 231 is disposed to be rotatable around the cup attachment axis K2. Then, the mountingportion 231 is rotated around the axis K2 by the rotation of themotor 234 via a rotation transmission mechanism (not illustrated). In this manner, when the lens LE has an astigmatic axis (cylinder axis), an angle of the cup CU in a reference horizontal direction is changed, and the cup CU is attached to the lens LE in a form where the astigmatic axis matches lens prescriptions. - The
cup attachment device 200 includes a lensinformation acquisition unit 240 for acquiring information on the lens LE. The lensinformation acquisition unit 240 may serve as an optical system for acquiring optical characteristics of the lens LE (optical center position, astigmatic axis direction, lens power, and the like) as well as information on the lens LE which is different from the optical characteristics of the lens LE (for example, an outer shape of the lens LE, a position of a marking point assigned to the lens LE, a hidden mark formed on the lens LE, and the like). - For example, the lens
information acquisition unit 240 includes an illuminationoptical system 241, a light receivingoptical system 245, and an imaging optical system 248. The illuminationoptical system 241 includes alight source 242, ahalf mirror 243, and aconcave mirror 244, and illuminates the lens LE along an optical axis L1. In addition, aretroreflective member 252 is disposed below the lens LE, and the lens LE is illuminated from behind the lens LE by a light flux reflected on theretroreflective member 252. The light flux reflected on theretroreflective member 252 is guided to the imaging optical system 248. - The light receiving
optical system 245 includes atarget plate 246, animage sensor 247, and the like. For example, thetarget plate 246 has an index in which a large number of openings (light flux passage ports) are formed in a predetermined pattern, and is used to detect the optical center of the lens LE, the astigmatic axis direction, and the like. Theimage sensor 247 captures an image of a measurement light flux that is emitted by thelight source 242 to pass through the lens LE and thetarget plate 246. Based on a position of an index image captured by theimage sensor 247, the optical center position of the lens LE, the astigmatic axis angle and the like are detected. - The imaging optical system 248 includes a
concave mirror 244 shared with the illuminationoptical system 241, a diaphragm (reference numeral omitted) disposed at a focal position of theconcave mirror 244, an imaging lens (reference numeral omitted), animage sensor 251, and the like. Theimage sensor 251 captures an image of a reflection light flux reflected on theretroreflective member 252. In a case where a marking point is assigned to the front surface of the lens LE, a position of the marking point is detected by analyzing a lens image captured by theimage sensor 251. In this manner, the optical center position of the lens LE to which the marking point is assigned and the astigmatic axis direction are detected. In addition, an outer shape of the lens LE is acquired by analyzing the lens image captured by theimage sensor 251. - The
cup attachment device 200 includes acontrol unit 260. The movement unit 230, themotor 234, and the lensinformation acquisition unit 240 are connected to thecontrol unit 260. Thecontrol unit 260 controls these electrical components. In addition, thecontrol unit 260 controls the lensinformation acquisition unit 240 to obtain various measurement information. An attachment position of the cup CU may be set at the optical center position of the lens LE, or may be set at a geometric center position of a target lens shape. As a matter of course, the attachment position may be set to be attached at a position different from the above-described positions. - An example of a detailed configuration of the
cup attachment device 200 is disclosed inJP2008-299140A -
FIG. 6 is a view illustrating a schematic configuration of the adhesivetape supply device 300. The adhesivetape supply device 300 includes asubstrate movement unit 310 that functions as a first actuator. Thesubstrate movement unit 310 is used to move thelower mount 30 which is an example of a substrate on which the adhesive tape TA is adhered to be disposed. - For example, as illustrated in
FIG. 7 , a plurality of the adhesive tapes TA are adhered to be disposed and aligned at a constant interval on thelower mount 30. In an example inFIG. 7 , the adhesive tapes TA are aligned in one line on thelower mount 30. In addition, anupper mount 31 is provided on the adhesive tape TA disposed on thelower mount 30 to cover the adhesive tape TA. That is, the adhesive tape TA is disposed to be pinched between thelower mount 30 and theupper mount 31. Theupper mount 31 is an example of a protector that protects an adhesive surface of the upper surface of the adhesive tape TA. Anintegrated tape 32 in which thelower mount 30 and theupper mount 31 are integrated across the adhesive tape TA is loaded into the adhesivetape supply device 300 in a wound state. - The adhesiveness of the
upper mount 31 with respect to the upper surface of the adhesive tape TA is weaker than the adhesiveness of thelower mount 30 with respect to the adhesive tape TA. In this manner, theupper mount 31 is first detached from theintegrated tape 32 in a state where the adhesive tape TA remains on thelower mount 30. The adhesiveness of theupper mount 31 with respect to the upper surface of the adhesive tape TA may be the same (including substantially the same). Even in this case, theupper mount 31 can be gradually detached from theintegrated tape 32 by giving a movement trigger in a direction in which theupper mount 31 is separated from the adhesive tape TA. - In addition, the adhesiveness of the
lower mount 30 with respect to the adhesive tape TA is weaker than the adhesiveness of the adhesive tape TA with respect to the cup CU. In this manner, in a case where the adhesive tape TA is adhered to the fixing surface of the cup CU, thelower mount 30 is moved in a direction away from the adhesive tape TA so that thelower mount 30 is allowed to be easily detached. The adhesiveness of thelower mount 30 with respect to the adhesive tape TA may be the same (including substantially the same). Even in this case, the movement trigger is given in a direction in which thelower mount 30 is separated from the adhesive tape TA. In this manner, thelower mount 30 can be gradually separated from the adhesive tape TA while the adhesive tape TA is bonded to the cup CU. - In
FIG. 6 , thesubstrate movement unit 310 includes two timingpulleys pulleys motor 318 for rotating the timingpulley 312. Thelower mount 30 is placed on thebelt 316. Thebelt 316 is moved in a feeding direction by themotor 318. - In addition, the adhesive
tape supply device 300 may include aprotector detachment unit 330 that functions as a second actuator. Theprotector detachment unit 330 is used to detach theupper mount 31 from the integrated tape 32 (that is, the upper surface of the adhesive tape TA). InFIG. 6 , theprotector detachment unit 330 is disposed on thesubstrate movement unit 310. Theprotector detachment unit 330 includes two timingpulleys pulleys motor 338 for rotating the timingpulley 332. Theintegrated tape 32 is disposed to be pinched between thebelt 316 of thesubstrate movement unit 310 and thebelt 336 of theprotector detachment unit 330. - The
protector detachment unit 330 may include an uppermount guide mechanism 340. The uppermount guide mechanism 340 guides the movement of theupper mount 31 in a direction away from a plane on which the adhesive tape TA is disposed (upward direction in the embodiment inFIG. 6 ). For example, the uppermount guide mechanism 340 includes a timingpulley 334 for moving thebelt 336 in the upward direction, and aroller 342 disposed in the upper portion of the timingpulley 334. Theroller 342 is disposed to press thebelt 336 in a state where theupper mount 31 is pinched between theroller 342 and thebelt 336. Then, theroller 342 is rotated in synchronization with the movement of thebelt 336 so that theupper mount 31 detached from the adhesive tape TA is guided in the upward direction. Theupper mount 31 is discarded in a collection container (not illustrated). - The
substrate movement unit 310 may include a lowermount guide mechanism 320. The lowermount guide mechanism 320 guides the movement of thelower mount 30 in a direction away from the plane on which the adhesive tape TA is disposed (downward direction in the embodiment inFIG. 6 ). For example, the lowermount guide mechanism 320 includes a timingpulley 314 for moving thebelt 316 in the downward direction and aroller 322 disposed in a lower portion of the timingpulley 314. Theroller 322 is disposed to press thebelt 316 in a state where thelower mount 30 is pinched between theroller 322 and thebelt 316. Theroller 322 is rotated in synchronization with the movement of thebelt 316 so that thelower mount 30 is guided in a direction away from the adhesive tape TA (downward direction in the embodiment). Specifically, thelower mount 30 is moved in the downward direction together with thebelt 316 along an arc of the timingpulley 314. Thelower mount 30 guided in the downward direction is discarded in a collection container (not illustrated). - In addition, the adhesive
tape supply device 300 may include anobject sensor 350 which is an example of object detection means for detecting the presence of an object. For example, theobject sensor 350 is disposed to detect the adhesive tape TA on thelower mount 30 moved by thebelt 316 after theupper mount 31 is detached by theprotector detachment unit 330. As long as theobject sensor 350 can detect a position of the adhesive tape TA, a disposition position thereof is not particularly limited. - The adhesive
tape supply device 300 has acontrol unit 360. Amotor 318, amotor 338, and theobject sensor 350 are connected to thecontrol unit 360. Thecontrol unit 360 controls driving of themotors object sensor 350. -
FIG. 8 is a view illustrating a control device of the whole eyeglasseslens processing system 2. The adhesive tape sticking system 1 includes acontrol device 600 for controlling the whole system. Thecontrol device 600 is connected to thecontrol unit 139 of therobot arm 100, thecontrol unit 260 of thecup attachment device 200, and thecontrol unit 360 of the adhesivetape supply device 300. In addition, in the present embodiment, thecontrol device 600 also serves as a control device for the whole eyeglasseslens processing system 2, and is also connected to thecontrol unit 410 of the eyeglasseslens processing device 400 and thecontrol unit 510 of thetray transport device 500. The connection to thecontrol device 600 is not limited to wired connection, and may be communicably connected by wireless. - The
control device 600 cooperates with the control units (139, 260, 360, 410, and 510) of each device forming the adhesive tape sticking system 1 and the eyeglasseslens processing system 2 to control an operation of each device. The control unit of each device may be included in thecontrol device 600. Thecontrol device 600 is connected to anoperation unit 612 and a display unit 614. In addition, ahost computer 650 is communicably connected to thecontrol device 600. For example, thehost computer 650 is connected to a database, and manages lens processing information required for processing the peripheral edge of the lens LE. Thecontrol device 600 acquires the lens processing information on the lens LE placed in the tray TR via thehost computer 650. For example, the lens processing information includes at least one of a target lens shape for processing the peripheral edge of the lens LE, layout data (positional relationship data of the optical center of the lens LE with respect to the target lens shape), prescription data of the lens LE (astigmatic axis angle, prescription power of minus power or plus power, and the like). - An operation of the eyeglasses
lens processing system 2 having the configuration as described above will be described with reference toFIGs. 9A and 9B. FIG. 9A is a view for showing an operation for attaching the cup CU to the adhesive tape TA.FIG. 9B is a view for showing an operation for separating the adhesive tape TA stuck on the cup CU from thelower mount 30. - First, the
control device 600 controls the adhesivetape supply device 300 to prepare for sticking the adhesive tape TA on the fixing surface of the cup CU. Thecontrol device 600 controls thesubstrate movement unit 310 to move thelower mount 30 in a predetermined feeding direction, thereby moving the adhesive tape TA to a first position P1 (position where the cup CU is placed). Specifically, under the control of thecontrol unit 360 receiving a control command from thecontrol device 600, thesubstrate movement unit 310 and theprotector detachment unit 330 are synchronously driven, and thebelt 316 and thebelt 336 are moved at the same speed in a feeding direction (in a direction indicated by an arrow A inFIG. 9A ). In this manner, theintegrated tape 32 is moved in the feeding direction. Then, as theroller 342 is synchronously rotated in response to the movement of thebelt 336, theupper mount 31 located between theroller 342 and thebelt 336 is guided in the upward direction by the uppermount guide mechanism 340. On the other hand, thebelt 316 extends to be long in the feeding direction from the position of thebelt 336, and thelower mount 30 placed on thebelt 336 is guided and pulled in the downward direction by the lowermount guide mechanism 320. In this manner, theupper mount 31 is first detached from the adhesive tape TA. A position of the adhesive tape TA from which theupper mount 31 is detached is detected by theobject sensor 350, and is moved to the first position P1, based on detection information thereof. Thereafter, the movement of the lower mount 30 (movement of the belt 316) is stopped, and the adhesive tape TA is brought into a standby state. - In addition, the
control device 600 acquires the lens processing information (prescription data including target lens shape, layout data, and astigmatic axis angle) of the lens LE. For example, a work sheet for a pair of right and left lenses LE is attached to the tray TR. A barcode is attached to the work sheet, and the barcode is read by a barcode reader (not illustrated). The read barcode is transmitted tohost computer 650. Thehost computer 650 reads the lens processing information stored in association with the barcode from the database, and transmits the lens processing information to thecontrol device 600. In this manner, thecontrol device 600 acquires the lens processing information on the pair of right and left lenses LE. - Next, the
control device 600 controls therobot arm 100 to install the lens LE at a predetermined position in thecup attachment device 200. Specifically, thearm portion 130 and the holdingportion 137 are driven by thecontrol unit 139 receiving a control command from thecontrol device 600, and the lens LE (one of the pair of right and left eyeglasses lenses) placed at the predetermined position in the tray TR is transported after being held by the holdingportion 137. The lens LE is installed in thelens support mechanism 210 of thecup attachment device 200. - Next, the
control device 600 controls therobot arm 100 to cause the holdingportion 137 to hold the cup CU, and moves the holdingportion 137 in a state where the holdingportion 137 holds the cup CU, whereby the cup CU is applied onto the adhesive tape TA. Specifically, thearm portion 130 and the holdingportion 137 are driven by thecontrol unit 139 receiving a control command from thecontrol device 600, and the holdingportion 137 holds the cup CU placed at a predetermined position on the tray TR. In the present embodiment, the cup CU is held by the holdingportion 137 in such a manner that both side edges in the longitudinal direction of thecollar portion 11 in the cup CU are pinched between the twofingers 137a. Thehooks 12 on both sides in the cup CU may be held by the twofingers 137a. In a state where the cup CU is held by the holdingportion 137, the holdingportion 137 is moved by an operation of thearm portion 130. As illustrated inFIG. 9A , the cup CU is placed on the adhesive tape TA located at the first position P 1, whereby the cup CU is applied onto the adhesive tape TA. At this time, a rotation angle of the holdingportion 137 around the rotation axis X6 is controlled so that the longitudinal direction of thecollar portion 11 of the cup CU coincides with the longitudinal direction of the adhesive tape TA. - Next, after the cup CU is applied onto the adhesive tape TA, the
control device 600 controls thecup attachment device 200 to cause theblocking arm 232 to hold the cup CU adhering to the adhesive tape TA. Specifically, first, thecontrol unit 360 receiving a control command from thecontrol device 600 controls the driving of thesubstrate movement unit 310, and the cup CU applied onto thelower mount 30 and the adhesive tape TA is moved to a second position P2 when being held by the blockingarm 232. The cup CU is moved from the first position P1 to the second position P2 so that the cup CU is easily held by the blockingarm 232. In addition, a mechanism for moving the blockingarm 232 does not need to increase in size. The cup CU may be held at the first position P1 by the blockingarm 232 without moving thelower mount 30 and the cup CU to the second position P2. - Subsequently, the driving of the movement unit 230 is controlled by the
control unit 260 receiving a control command from thecontrol device 600, and the blockingarm 232 is lowered after the mountingportion 231 of the blockingarm 232 is moved onto the cup CU located at the second position P2. In this manner, thebase portion 10 of the cup CU is inserted into theinsertion hole 231a of the mountingportion 231. Theinsertion hole 231a of the mountingportion 231 has a built-in plunger for applying a load for holding the cup CU. In this manner, the cup CU is held by the blockingarm 232 via the mountingportion 231. - Next, the
control device 600 controls both the movement unit 230 of thecup attachment device 200 and thesubstrate movement unit 310 of the adhesivetape supply device 300 to change a positional relationship between the cup CU held by the blockingarm 232 and thelower mount 30, whereby the adhesive tape TA adhering to the cup CU is separated from thelower mount 30. Specifically, thesubstrate movement unit 310 and the movement unit 230 of thecup attachment device 200 are driven by thecontrol unit 260 and thecontrol unit 360 which receive the control command from thecontrol device 600. As illustrated inFIG. 9B , the lower mount 30 (that is, the belt 316) is moved in the feeding direction, the blockingarm 232 is also moved in the feeding direction in synchronization with this movement (that is, moved at the same speed). Then, on the way of this movement, the lowermount guide mechanism 320 guides and gradually moves thelower mount 30 in a direction away from the plane on which the adhesive tape TA is disposed (vertical direction with respect to the plane on which the adhesive tape TA is disposed, the downward direction in the embodiment), whereby thelower mount 30 is detached from the adhesive tape TA adhering to the cup CU. More specifically, in synchronization with the movement of the cup CU held by the blockingarm 232 in the feeding direction, thelower mount 30 is moved in the downward direction together with thebelt 316 along an arc of the timing pulley 314 (that is, guided by the lower mount guide mechanism 320), whereby thelower mount 30 is moved to be gradually wound from the front direction in the feeding direction of thelower mount 30. - In this way, in synchronization with the movement of the cup CU in the feeding direction, the lower
mount guide mechanism 320 gradually moves thelower mount 30 in the direction away from the installation plane of the adhesive tape TA (may have a component at least in the vertical direction with respect to the installation plane of the adhesive tape TA), whereby thelower mount 30 is more smoothly separated (detached) from the adhesive tape TA. - Next, the
control device 600 controls the movement unit 230 of thecup attachment device 200 to fix the cup CU to the refractive surface of the lens LE placed at a predetermined position via the adhesive tape TA. Specifically, thecontrol unit 260 receiving the control command from thecontrol device 600 first controls the lensinformation acquisition unit 240 to obtain information on the optical characteristics of the lens LE, and the like. For example, in a case where the lens LE is a single focus lens, the optical characteristics of the optical center position and the astigmatic axis angle of the lens LE are obtained, based on a position of an index image captured by theimage sensor 247 of the light receivingoptical system 245. In a case where a marking point is assigned to the lens LE by a lens meter, a position of the marking point may be detected by analyzing a lens image captured by theimage sensor 251 of the imaging optical system 248, and the optical characteristics of the optical center position and the astigmatic axis angle of the lens LE may be obtained, based on a detection result thereof. - In addition, the
control unit 260 receiving the control command from thecontrol device 600 acquires the lens processing information on the lens LE (target lens shape, layout data, astigmatic axis angle of prescription data). - When the optical characteristics of the lens LE (optical center position and astigmatic axis angle) and lens processing information are obtained, the driving of the movement unit 230 is controlled based on the information, and the blocking
arm 232 is moved toward the lens LE placed on thelens support unit 210 so that the cup CU is attached to the refractive surface of the lens LE. For example, the cup CU is attached to a geometric center position of the target lens shape. The geometric center position of the target lens shape is obtained from the obtained optical center position of the lens LE and layout data. The attachment position of the cup CU may be set at the optical center position of the lens LE. In addition, when the lens LE has an astigmatic axis, the mountingportion 231 is rotated around the axis K2, based on the acquired astigmatic axis angle and prescription data, and the astigmatic axis angle of the lens LE and the reference direction of the cup CU have a constant relationship. - When the cup CU is completely attached to the lens LE, the blocking
arm 232 is moved to a predetermined standby position after being raised. At this time, since the cup CU is in a state of being held by the blockingarm 232, the lens LE to which the cup CU is fixed is lifted and moved together with the cup CU. - Next, the
control device 600 controls therobot arm 100 to take out the lens LE together with the cup CU held by the blockingarm 232, and transports and attaches the lens LE to the lens holding shaft 402 of the eyeglasseslens processing device 400. Specifically, thecontrol unit 139 receiving the control command from thecontrol device 600 drives thearm portion 130 and the holdingportion 137. The holdingportion 137 holds the cup CU or the lens LE (in the embodiment, an edge of thecollar portion 11 in the cup CU is gripped by the twofingers 137a of the holding portion 137), and the holdingportion 137 is lowered. In this manner, thebase portion 10 of the cup CU is extracted from the mountingportion 231, and the lens LE including the cup CU is removed. Thereafter, the cup CU including the lens LE is attached to thelens holding shaft 402L of the eyeglasseslens processing device 400 by the movement of thearm portion 130. - Next, the
control device 600 controls the eyeglasseslens processing device 400 so that the peripheral edge of the lens LE held by the lens holding shaft 402 is processed by theprocessing tool 460. Specifically, thecontrol unit 410 receiving the control command from thecontrol device 600 controls thelens holding mechanism 440 to move thelens holding shaft 402R to thelens holding shaft 402L side, whereby the lens LE is held by the lens holding shaft 402. Thereafter, driving of themovement unit 450 is controlled based on processing data so that the peripheral edge of the lens LE is processed by theprocessing tool 460. - After the lens LE is completely processed, the
control device 600 controls therobot arm 100 to cause the holdingportion 137 to hold the lens LE processed by the eyeglasseslens processing device 400, and take out the lens LE from thelens holding shaft 402L. Thereafter, thecontrol device 600 controls therobot arm 100 to return the processed lens LE held by the holdingportion 137 to the tray TR. - The other unprocessed lens LE placed in the tray TR is also processed by performing the same operation, and the processed lens LE is returned to the tray TR.
- Hitherto, a typical example in the present disclosure has been described. However, the present disclosure is not limited to the above-described embodiment, and various modifications can be made.
- For example, in the above-described embodiment, an example has been described in which both the
substrate movement unit 310 and the movement unit 230 of thecup attachment device 200 are controlled when the adhesive tape TA adhering to the cup CU is separated from thelower mount 30; however, the present disclosure is not limited thereto. Thecontrol device 600 may control at least one of thesubstrate movement unit 310 and the movement unit 230 of thecup attachment device 200 to change a positional relationship between the cup CU held by the blocking arm 232 (second holding unit) and the lower mount 30 (substrate), whereby the adhesive tape TA adhering to the cup CU may be separated from thelower mount 30. - For example, the
control device 600 may control the movement unit 230 to move the cup CU in the direction away from thelower mount 30, whereby the adhesive tape TA may be separated from thelower mount 30. For example, the direction away from thelower mount 30 can be the vertical direction with respect to the plane on which the adhesive tape TA is disposed in thelower mount 30. Specifically, after theblocking arm 232 holds the cup CU, the movement unit 230 may be driven to move the cup CU held by the blockingarm 232 in the upward direction which is an example of the separation direction. Since thelower mount 30 is pressed against thebelt 316 by the lowermount guide mechanism 320, thelower mount 30 does not follow the movement in the upward direction of the adhesive tape TA adhering to the cup CU, and thelower mount 30 is detached from the adhesive tape TA. In this case, the adhesiveness of thelower mount 30 with respect to the adhesive tape TA may be weaker than the adhesiveness of the adhesive tape TA with respect to the cup CU. - Alternatively, the
control device 600 may control thesubstrate movement unit 310 to move thelower mount 30 in the direction away from the cup CU held by the blocking arm 232 (for example, a direction having at least vertical component with respect to the plane on which the adhesive tape TA adhering to the cup CU is disposed). In this case, thelower mount 30 may be moved to be gradually wound from the front direction in the feeding direction of thelower mount 30. - In addition, in the above-described embodiment, in the case where the cup CU is held by the blocking
arm 232, the cup CU is moved to the second position P2. However, the cup CU may remain at the first position P1 when the cup CU is applied onto the adhesive tape TA by therobot arm 100. In this case, after the holdingportion 137 of therobot arm 100 is retracted, the blockingarm 232 is moved to cause theblocking arm 232 to hold the cup CU. In addition, in this case, the blockingarm 232 may be configured to be movable to the first position P1 with respect to an installation position of thecup attachment device 200. - In addition, in the above-described embodiment, in the case where the cup CU applied onto the adhesive tape TA is held, the blocking
arm 232 which is an example of the second holding unit is used. However, instead of the blockingarm 232, the holdingportion 137 of therobot arm 100 which is an example of the first holding unit may be used as the second holding unit. In this case, therobot arm 100 is shared to be also used as the second movement unit for moving the second holding unit that holds the cup CU. In addition, in this case, subsequently to the step of sticking the adhesive tape TA to the cup CU, even in the step of separating the adhesive tape TA adhering to the cup CU from thelower mount 30, while the cup CU is held by the holdingportion 137, the adhesive tape TA adhering to the cup CU is efficiently separated from thelower mount 30 by moving therobot arm 100 instead of moving the blockingarm 232. - Then, the
robot arm 100 may hold and transport the cup CU to which the adhesive tape TA is adhered, and the cup CU may be mounted on the mountingportion 231 included in the blockingarm 232 of thecup attachment device 200. In this manner, restrictions on the positional relationship between thecup attachment device 200 and the adhesivetape supplying device 300 are reduced, and both of these are more freely installed.
Claims (9)
- An adhesive tape sticking system that sticks an adhesive tape, which is used for fixing a cup serving as a processing jig of an eyeglasses lens to a refractive surface of the eyeglasses lens, on a fixing surface of the cup, the adhesive tape sticking system comprising:a substrate movement unit that moves a substrate on which the adhesive tape is adhered to be disposed;a first movement unit that moves a first holding unit configured to hold the cup;a second movement unit that moves a second holding unit configured to hold the cup; anda control device configured to:control the substrate movement unit to move the adhesive tape to a first position by moving the substrate in a predetermined feeding direction;control the first movement unit to cause the first holding unit to hold the cup, and to apply the cup onto the adhesive tape by moving the first holding unit in a state where the cup is held by the first holding unit after the adhesive tape is moved to the first position;control the second movement unit, after the cup is applied onto the adhesive tape, to cause the second holding unit to hold the cup adhering to the adhesive tape; andcontrol at least one of the substrate movement unit and the second movement unit, after the cup is held by the second holding unit, to separate the adhesive tape stuck on the cup from the substrate by changing a positional relationship between the cup held by the second holding unit and the substrate.
- The adhesive tape sticking system according to claim 1,
wherein the control device is configured to control both the substrate movement unit and the second movement unit when the adhesive tape is separated from the substrate. - The adhesive tape sticking system according to claim 1 or 2,
wherein the substrate movement unit includes a substrate guide means that guides a movement of the substrate in a direction away from a plane on which the adhesive tape is disposed. - The adhesive tape sticking system according to claim 3,
wherein the control device is configured to:control the substrate movement unit, after the cup is held by the second holding unit, to move the substrate in the direction away from the plane by the substrate guide means; andcontrol the second movement unit in synchronization with the movement of the substrate to separate the adhesive tape stuck on the cup from the substrate by moving the second holding unit in a direction along the plane. - The adhesive tape sticking system according to any one of claims 1 to 4, further comprising:a cup attachment device that has a blocking arm for holding the cup, and attaches the cup to the eyeglasses lens, the cup attachment device attaching the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position,wherein the blocking arm is used as the second holding unit.
- The adhesive tape sticking system according to any one of claims 1 to 4,
wherein the second holding unit is shared to be used as the first holding unit, and the second movement unit is shared to be used as the first movement unit. - The adhesive tape sticking system according to any one of claims 1 to 6,wherein the first movement unit has a robot arm including an arm portion having a plurality of joint portions and a holding portion provided at the arm portion to hold and release an object, the robot arm moving the object held by the holding portion by rotating the arm portion via the joint portions, andthe holding portion is used as the first holding unit.
- The adhesive tape sticking system according to any one of claims 1 to 4, further comprising:a cup attachment device that has a blocking arm for holding the cup, and attaches the cup to the eyeglasses lens, the cup attachment device attaching the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position,wherein the first movement unit is shared to be used as the second movement unit, and has a robot arm including an arm portion having a plurality of joint portions and a holding portion provided at the arm portion to hold and release an object, the robot arm moving the object held by the holding portion by rotating the arm portion via the joint portions,the holding portion is used as the first holding unit and the second holding unit, andthe control device is configured to control the robot arm to mount the cup adhering to the adhesive tape on a cup holding portion of the blocking arm.
- An eyeglasses lens processing system that includes the adhesive tape sticking system according to any one of claims 1 to 4 and processes a peripheral edge of an eyeglasses lens, the eyeglasses lens processing system comprising:an eyeglasses lens processing device that causes a processing tool to process the peripheral edge of the eyeglasses lens held by a lens holding shaft;a cup attachment device that has a blocking arm for holding the cup and a movement means for changing a relatively positional relationship between the cup held by the blocking arm and the eyeglasses lens supported by a lens support mechanism, the cup attachment device attaching the cup to the refractive surface of the eyeglasses lens via the adhesive tape by moving the blocking arm toward the eyeglasses lens placed at a predetermined position; anda robot arm that includes an arm portion having a plurality of joint portions and a holding portion provided at the arm portion to hold and release an object, the robot arm moving the object held by the holding portion by rotating the arm portion via the joint portions,wherein the holding portion of the robot arm is used as the first holding unit, and the robot arm is used as the first movement unit,the blocking arm of the cup attachment device is used as the second holding unit, and the movement means is used as the second movement unit,the control device is configured to:control the robot arm to transport the eyeglasses lens placed at a predetermined position and to dispose the eyeglasses lens at a predetermined lens placement position of the cup attachment device;control the robot arm to cause the holding portion to hold the cup placed at a predetermined position, and to apply the cup onto the adhesive tape moved to the first position;control the movement means, after the adhesive tape stuck on the cup held by the blocking arm is separated from the substrate, to attach the cup to the refractive surface of the eyeglasses lens placed at a predetermined position via the adhesive tape by moving the blocking arm;control the robot arm, after the cup is attached to the refractive surface of the eyeglasses lens, to cause the holding portion to hold and take out the eyeglasses lens together with the cup held by the blocking arm, and to attach the eyeglasses lens to the lens holding shaft of the eyeglasses lens processing device; andcontrol the robot arm, after the eyeglasses lens is completely processed by the eyeglasses lens processing device, to cause the holding portion to hold and take out the eyeglasses lens held by the lens holding shaft, and to move the processed eyeglasses lens to a predetermined position.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022085047A JP2023173057A (en) | 2022-05-25 | 2022-05-25 | Adhesive tape bonding system and spectacle lens processing system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4282584A1 true EP4282584A1 (en) | 2023-11-29 |
Family
ID=86497575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23174728.8A Pending EP4282584A1 (en) | 2022-05-25 | 2023-05-23 | Adhesive tape sticking system and eyeglasses lens processing system |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4282584A1 (en) |
| JP (1) | JP2023173057A (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008299140A (en) | 2007-05-31 | 2008-12-11 | Nidek Co Ltd | Cup attaching apparatus |
| JP4335881B2 (en) * | 2000-02-22 | 2009-09-30 | Hoya株式会社 | Lens layout block device and method for manufacturing spectacle lens |
| JP2013158866A (en) | 2012-02-03 | 2013-08-19 | Nidek Co Ltd | Eyeglass lens processing apparatus |
| JP2019141970A (en) | 2018-02-22 | 2019-08-29 | 株式会社デンソーウェーブ | Arm rotary shaft speed detector of robot |
| EP3800007A1 (en) * | 2019-10-03 | 2021-04-07 | Nidek Co., Ltd. | Eyeglass lens peripheral edge processing system and eyeglass lens peripheral edge processing program |
| JP2021058947A (en) | 2019-10-03 | 2021-04-15 | 株式会社ニデック | Spectacle lens peripheral machining system |
-
2022
- 2022-05-25 JP JP2022085047A patent/JP2023173057A/en active Pending
-
2023
- 2023-05-23 EP EP23174728.8A patent/EP4282584A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4335881B2 (en) * | 2000-02-22 | 2009-09-30 | Hoya株式会社 | Lens layout block device and method for manufacturing spectacle lens |
| JP2008299140A (en) | 2007-05-31 | 2008-12-11 | Nidek Co Ltd | Cup attaching apparatus |
| JP2013158866A (en) | 2012-02-03 | 2013-08-19 | Nidek Co Ltd | Eyeglass lens processing apparatus |
| JP2019141970A (en) | 2018-02-22 | 2019-08-29 | 株式会社デンソーウェーブ | Arm rotary shaft speed detector of robot |
| EP3800007A1 (en) * | 2019-10-03 | 2021-04-07 | Nidek Co., Ltd. | Eyeglass lens peripheral edge processing system and eyeglass lens peripheral edge processing program |
| JP2021058947A (en) | 2019-10-03 | 2021-04-15 | 株式会社ニデック | Spectacle lens peripheral machining system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023173057A (en) | 2023-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4138569B2 (en) | Lens processing system | |
| EP0990484B1 (en) | Eyeglass lens processing system | |
| US5015090A (en) | Centering apparatus for a gemstone | |
| JP3872691B2 (en) | Lens layout block device and raw lens blocking method | |
| US7371151B2 (en) | Lens stocking apparatus and lens processing system having the same | |
| CN109663836A (en) | The automatic shaping structure of sensor pin | |
| EP4282584A1 (en) | Adhesive tape sticking system and eyeglasses lens processing system | |
| JP2014233788A (en) | Spectacle lens processing device and spectacle lens vertical direction detection program | |
| CN211109742U (en) | Blood type card label lamp is examined and is held in palm all-in-one with dress | |
| CN109849352B (en) | Spring assembly device for double-card mobile phone card holder | |
| WO2016031053A1 (en) | Working head unit, mounting device, and method for controlling working head unit | |
| CN109065469A (en) | A kind of IC chip optics sampling observation machine of band laser cutting function | |
| JP2007268706A (en) | Layout block device for lens | |
| CN110963272A (en) | Blood type card label lamp is examined and is held in palm all-in-one with dress | |
| JP4335881B2 (en) | Lens layout block device and method for manufacturing spectacle lens | |
| JP4382763B2 (en) | Lens layout block device and method for manufacturing spectacle lens | |
| JP4377385B2 (en) | Attaching the elastic seal to the lens holder | |
| JP6661231B2 (en) | Work head unit, mounting apparatus, and control method of work head unit | |
| CN219750323U (en) | Automatic shoe tongue label attaching device based on parallel robot visual recognition | |
| WO2024004552A1 (en) | Eyeglass lens processing system | |
| JP6781282B2 (en) | Control method of work head unit, mounting device and work head unit | |
| JP5603580B2 (en) | Electronic circuit component mounting machine | |
| US12109736B2 (en) | Molded article manufacturing method | |
| JP7087264B2 (en) | Auxiliary method and auxiliary device | |
| JP4414403B2 (en) | Lens layout block device and method for manufacturing spectacle lens |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240517 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |