EP4091939B1 - Fluggerät - Google Patents
Fluggerät Download PDFInfo
- Publication number
- EP4091939B1 EP4091939B1 EP21175290.2A EP21175290A EP4091939B1 EP 4091939 B1 EP4091939 B1 EP 4091939B1 EP 21175290 A EP21175290 A EP 21175290A EP 4091939 B1 EP4091939 B1 EP 4091939B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- aircraft
- rotation
- propulsion devices
- thrust
- straight line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
- B64C29/0008—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded
- B64C29/0016—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers
- B64C29/0025—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers the propellers being fixed relative to the fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
- B64C29/0008—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded
- B64C29/0016—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers
- B64C29/0033—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers the propellers being tiltable relative to the fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/003—Aircraft not otherwise provided for with wings, paddle wheels, bladed wheels, moving or rotating in relation to the fuselage
- B64C39/005—Aircraft not otherwise provided for with wings, paddle wheels, bladed wheels, moving or rotating in relation to the fuselage about a horizontal transversal axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/20—Vertical take-off and landing [VTOL] aircraft
Definitions
- the invention relates to an aircraft and to methods for producing and controlling the aircraft.
- the invention relates to an aircraft that can achieve stable hovering flight with drive devices rotating in the same direction, in particular cyclogyro rotors.
- Cyclogyros like helicopters, are also so-called vertical take-off and landing (VTOL) vehicles, i.e. aircraft that are able to take off and land vertically without a runway.
- VTOL vertical take-off and landing
- a cyclogyro rotor is based on the principle of generating thrust with rotating wings, which are then called rotor blades.
- rotating wings which are then called rotor blades.
- the axis of rotation of the wings of a cyclogyro rotor is aligned parallel to the longitudinal axis of the wings / rotor blades.
- the thrust direction of the entire cyclogyro rotor is normal to the axis of rotation.
- all rotor blades of the cyclogyro rotor should ideally be aligned as best as possible to the flow direction at all times in order to make a maximum contribution to the total thrust with the minimum required drive power.
- the maximum inclination of the rotor blades relative to the flow direction directly influences the amount of thrust generated. Due to the rotation of the rotor, the inclination of each rotor blade must be continuously changed during one revolution. Each rotor blade of a cyclogyro rotor therefore undergoes a periodic change of the pitch angle. This periodic change in the pitch angle is called pitch movement.
- each rotor blade can be connected to an eccentric bearing axis via one or more connecting rods.
- the resulting pitch movement of a rotor blade repeats itself cyclically with each rotor revolution.
- the periodic adjustment of the rotor blades generates a thrust vector normal to the rotor's axis of rotation.
- the periodic rotor blade adjustment is changed using an offset device, and the thrust vector can thus be rotated in the entire plane that is normal to the rotor's axis of rotation (thrust vector control).
- the rotor In addition to the thrust vector, the rotor generates a torque around the axis of rotation in the opposite direction to the rotor's direction of rotation, resulting from the tangential components of the air forces acting on the rotor blades, namely the lift and drag forces.
- the direction of the transverse force depends on the direction of rotation of the body or in this case: the cyclogyro rotor.
- US 10,384,776 B2 describes a tiltrotor aircraft having a fuselage and a wing with upper and lower surfaces with a plurality of channels extending therebetween, each of which has a cycloidal rotor mounted therein. At least two pylon assemblies are pivotally connected to the wing to operate the tiltrotor aircraft selectively between helicopter and airplane flight modes.
- US 2019/071174 A1 relates to a vertical take-off and landing (VTOL) vehicle comprising a fuselage, a vertical stabilizer, four tiltable wings, an electric generator using liquid fuel, rechargeable electrical energy storage devices, sensors including airflow sensors, and an actuation and feedback control system.
- the four tiltable wings can rotate independently and in a controllable manner about two axes parallel to the pitch axis, one of these axes being forward of the vehicle's center of gravity and the other behind it.
- US 2020/086984 A1 describes various configurations of the propulsion mechanisms of an aircraft. For example, in response to a fault or failure of one propulsion mechanism, the remaining propulsion mechanisms can be modified to maintain control and safety of the aircraft.
- EP 3 354 566 A1 relates to a thrust generating unit for generating thrust in a predetermined direction, comprising at least two rotor assemblies and a casing, wherein each of the at least two rotor assemblies defines an associated rotor plane, wherein a first rotor assembly of the at least two Rotor assemblies for operation in a trouble-free operating mode of the thrust generating unit and a second rotor assembly of the at least two rotor assemblies is provided for operation at least in the event of a failure of the first rotor assembly, and wherein the casing accommodates at most one of the at least two rotor assemblies.
- the object of the present invention is therefore to provide an aircraft which is able to assume a stable flight position even at high speeds in forward flight.
- an aircraft which comprises the following components: an aircraft body which defines a longitudinal direction, a vertical direction and a transverse direction, wherein the longitudinal direction corresponds to the direction from the tail to the nose of the aircraft, the vertical direction corresponds to the direction of gravity when the aircraft is resting on the ground, and the transverse direction is perpendicular to the longitudinal direction and the vertical direction, and at least two drive devices which can be rotated about a respective associated axis of rotation in order to generate a respective associated thrust vector.
- a first number of drive devices are arranged along a first straight line which runs parallel to the transverse direction, and a second number of the drive devices are arranged along a second straight line which runs parallel to the transverse direction.
- the first straight line is spaced from the second straight line, and the center of mass of the aircraft is positioned between the first straight line and the second straight line with respect to the longitudinal direction.
- the aircraft is designed to perform a hover flight in which all forces acting on the aircraft acting forces and all torques acting on the aircraft with respect to the center of mass of the aircraft essentially disappear, due to the fact that, in hovering flight, each of the associated axes of rotation is aligned essentially in the transverse direction of the aircraft body, and each of the at least two drive devices rotates essentially in the same direction of rotation about the respectively associated axis of rotation.
- an axis of rotation is aligned substantially in the transverse direction of the aircraft body if the angle enclosed between the axis of rotation and an axis running in the transverse direction and intersecting the axis of rotation is less than 45°, preferably less than 30°, particularly preferably less than 15°.
- the drive devices rotate essentially in the same direction of rotation if the scalar product of the vector of the angular velocity of a specific drive device and a fixed, but arbitrary vector pointing in the transverse direction has the same sign for all drive devices.
- a vector in the transverse direction is first fixed. Then, for a first drive device, the scalar product of its angular velocity vector and the fixed vector is calculated; then for a second drive device, the scalar product of its angular velocity vector and the fixed vector; etc. Finally, only the signs (plus or minus) of the scalar products calculated in this way are compared. If all signs are the same, the drive devices under consideration or each of the drive devices under consideration rotates essentially in the same direction of rotation within the meaning of the invention.
- the aircraft is designed to hover with the propulsion devices rotating in essentially the same direction, the power consumption of the propulsion devices is reduced.
- the Magnus effect that occurs according to the invention replaces part of the thrust of the propulsion devices and thus reduces the power requirement in forward flight compared to hovering. Because more residual power is left for the propulsion devices in forward flight, the agility of the aircraft in forward flight is increased in particular.
- the Magnus effect states that a rotating round body in a flow experiences a transverse force normal to the direction of flow.
- this effect can generate an additional thrust vector or an additional thrust force in the vertical direction. This increases the overall lift force of the drive devices.
- the Magnus effect replaces part of the thrust force to be applied by the drive device and thus reduces the power requirement in forward flight compared to hovering. If the rotor is now in forward flight, it is actively supplied with air from the front.
- the additional transverse force of the Magnus effect acts essentially in the same direction as the thrust force of the drive devices when the flow remains constant and thus increases the overall thrust force or reduces the power requirement when the same lift force is required.
- the positive impact of the Magnus effect requires a lower power and/or rotation speed of the propulsion devices in order to keep the aircraft in a stable flight attitude.
- the aircraft is further designed such that, during hovering, the center of mass of the aircraft is positioned in such a way that all forces acting on the aircraft and all torques acting on the aircraft with respect to the center of mass of the aircraft are in the Essentially disappear when one or more of the propulsion devices generate a specific predetermined thrust vector associated with them.
- This instruction is linked to the restriction that the center of mass of the aircraft with respect to the longitudinal direction must lie within a range determined by the aircraft being able to hover when one or more of the propulsion devices are driven with maximum thrust or maximum thrust vector. In other words: If the center of mass is within the said range, the propulsion devices are able to generate corresponding thrust vectors so that the aircraft can hover.
- the approach speed is generally lower than in forward flight.
- the fact that the thrust vectors of the drive devices for hovering flight are specified for the aircraft according to the invention and the position of the center of mass for hovering flight is determined ensures that a stable flight attitude is also possible in forward flight.
- the positive effect according to the invention which is caused by the Magnus effect, is greater the greater the approach speed. Therefore, the configuration of the aircraft according to the invention in hovering flight ensures that the aircraft can assume a stable flight attitude, particularly in forward flight, because in forward flight the Magnus effect leads to a greater increase in the thrust vector than in the case of hovering flight.
- the thrust force or the thrust vector is used to generate the required lift force and/or to regulate the flight attitude of the aircraft.
- the aircraft expediently comprises a thrust vector control that regulates the required thrust force or required thrust vectors in hovering flight and/or in forward flight.
- Each of the drive devices according to the invention generates a torque against the direction of rotation.
- This torque around the axis of rotation against the direction of rotation of the drive device results from tangential air forces caused by air resistance, among other things.
- the drive device In order to maintain a constant rotational speed, the drive device must therefore generate a (drive) torque that corresponds to the tangential air forces.
- this latter torque is (ignoring dissipative effects) approximately the same magnitude as the torque generated by the tangential air forces, and also points in the same direction as the latter. Since the torque generated by the air forces counteracts the direction of rotation of the drive device, the torque applied by the aircraft body also counteracts the direction of rotation of the drive device. Assuming that the torque caused by the air forces and that of the drive device are essentially the same magnitude but in opposite directions, the torque applied by the aircraft body remains as the net torque due to the rotation of the drive device.
- the compensation of this torque or these torques is achieved in that the center of mass of the aircraft is positioned in such a way that, taking into account the thrust vectors assigned to the respective drive devices and predetermined, all forces acting on the aircraft and all torques acting on the aircraft with respect to the center of mass of the aircraft essentially disappear during hovering flight.
- the drive devices rotate essentially in the same direction
- the torques of all of these drive devices caused by the aircraft body, as described above also act essentially in the same direction. The torques therefore add up and do not cancel each other out.
- both the sum of all external forces (F) and the sum of all torques about the center of mass ( M s ) must each be zero.
- the forces acting on the aircraft in hovering flight are gravity and the thrust forces of the propulsion devices.
- the torques acting with respect to the center of mass of the aircraft are the torques generated by the thrust vectors of the propulsion devices, which are mounted at corresponding distances from the center of mass of the aircraft, as well as the (support) torques generated by the aircraft body, and all of which point essentially in the same direction.
- the force and torque balance can thus be achieved by selecting the thrust forces or thrust vectors of the propulsion devices and their distances from the center of mass of the aircraft accordingly.
- the first number of drive devices is arranged in a front region of the aircraft with respect to the longitudinal direction
- the second number of drive devices is arranged in a rear region of the aircraft with respect to the longitudinal direction
- the aircraft comprises three drive devices.
- the aircraft comprises four drive devices, wherein two of the drive devices are arranged in a front region of the aircraft with respect to the longitudinal direction, and two further drive devices are arranged in a rear region of the aircraft with respect to the Longitudinal direction in a rear area of the aircraft.
- the total length of the aircraft is measured longitudinally.
- the frontmost part of the aircraft is assigned the relative longitudinal coordinate 0 and the rearmost part of the aircraft is assigned the relative longitudinal coordinate 100%.
- the front area is defined by the fact that it corresponds to the (longitudinal) area from 0 to 40% of the total length of the aircraft
- the rear area is defined by the fact that it corresponds to the (longitudinal) area from 60% to 100% of the total length of the aircraft.
- the two drive devices arranged in the front area are on a common straight line that is aligned parallel to the transverse direction. It is also expedient if the two drive devices arranged in the rear area are on a common straight line that is aligned parallel to the transverse direction.
- the invention does not exclude the possibility that the aircraft, in addition to the at least two drive devices contributing to the effect according to the invention, comprises further drive devices which do not rotate substantially in the same direction of rotation.
- an aircraft which comprises an aircraft fuselage and at least three drive devices which are mounted around the aircraft fuselage and which can be rotated about a respective associated axis of rotation in order to generate a respective associated thrust vector.
- the aircraft is designed to perform a hover flight in which all forces acting on the aircraft and all torques acting on the aircraft with respect to the center of mass of the aircraft essentially disappear, in that in hover flight the associated axes of rotation of two of the at least three drive devices are aligned essentially in a first direction, and the associated axis of rotation of a further one of the at least three drive devices is aligned essentially in a second direction, wherein the first direction is not parallel to the second direction, and each of the two drive devices with axes of rotation aligned in the first direction in hover flight rotates essentially in the same direction of rotation about the respectively associated axis of rotation.
- the first direction is not parallel to the second direction if a (reference) axis pointing in the first direction is not parallel to a (reference) axis pointing in the second direction.
- the angle between the first and second directions is in the range of 30° to 110°, preferably in the range of 40° to 100°, particularly preferably in the range of 60° to 95°.
- the at least three drive devices are mounted around the aircraft fuselage essentially in one plane.
- the aircraft fuselage is expediently located in the plane, i.e. the plane intersects the aircraft fuselage. It is also advantageous if the first direction and the second direction are located in the plane.
- substantially supported in a plane means that the drive devices or their support points do not have to be contained in a plane in exactly the same way. It is also in accordance with the invention if one or more of the drive devices are pivoted out of the plane and/or the drive devices are vertically offset with respect to the plane.
- the vertical offset is expediently limited by the vertical extent of the aircraft fuselage, i.e., the drive devices are expediently supported in such a way that the axes of rotation of the drive devices are contained in the spatial area formed between two horizontal planes that touch the aircraft fuselage and are spaced apart from one another by the vertical extent of the aircraft fuselage.
- the vertical extent is related to the direction of gravity when the aircraft is resting on the (flat) ground.
- each of the axes of rotation of the two of the at least three drive devices is aligned such that it is substantially parallel to a straight line that runs through the two drive devices. It is expedient if the straight line is laid through the geometric centers (the term is explained further below) or bearing points of the drive devices.
- an axis of rotation is substantially parallel to a straight line if the angle enclosed between the axis of rotation and the straight line is less than 45°, preferably less than 30°, particularly preferably less than 15°.
- the aircraft according to the second aspect of the invention comprises at least four drive devices which are mounted around the aircraft fuselage and which are rotatable about a respective associated axis of rotation in order to generate a respective associated thrust vector.
- the aircraft is designed to perform the hovering flight in that, in the hovering flight, the associated axes of rotation of two of the at least four drive devices are essentially in the first direction are aligned, and the associated axes of rotation of two further ones of the at least four drive devices are aligned substantially in the second direction, wherein each of the two drive devices with axes of rotation aligned in the first direction when hovering rotates substantially in the same direction of rotation about the respectively associated axis of rotation, and/or each of the two drive devices with axes of rotation aligned in the second direction when hovering rotates substantially in the same direction about the respectively associated axis of rotation.
- the Magnus effect in forward flight has the greatest effect on those drive devices whose axes of rotation are aligned essentially perpendicular to the direction of flight.
- the aircraft is configured such that, in hovering flight, each of the two drive devices with axes of rotation aligned in the first direction in hovering flight rotates essentially in the same direction of rotation about the respective associated axis of rotation, or, in the case of at least four drive devices, each of the two drive devices with axes of rotation aligned in the second direction in hovering flight rotates essentially in the same direction of rotation about the respective associated axis of rotation.
- the aircraft if it comprises at least four drive devices, is configured such that, in hovering flight, each of the two drive devices with axes of rotation aligned in the first direction in hovering flight rotates in essentially the same direction around the respective associated axis of rotation, and each of the two drive devices with axes of rotation aligned in the second direction during hovering rotates in essentially the same direction around the respective associated axis of rotation.
- This ensures that the aircraft can exploit the positive effect of the Magnus effect during forward flight in both the first and second directions.
- the aircraft is therefore more flexible and stable when changing direction of flight.
- the aircraft is further designed such that, during hovering, the center of mass of the aircraft is positioned in such a way that all forces acting on the aircraft and all torques acting on the aircraft with respect to the center of mass of the aircraft essentially disappear when one or more of the drive devices generate a specific predetermined thrust vector assigned to them.
- This instruction is linked to the restriction that the center of mass of the aircraft must lie within a range which is determined by the fact that the aircraft can perform hovering when one or more of the drive devices are driven with maximum thrust force or maximum thrust vector. In other words: if the center of mass is within the said range, the drive devices are able to generate corresponding thrust vectors so that the aircraft can perform hovering.
- each of the rotation axes of the two of the at least four drive devices that are oriented essentially in the first direction is oriented such that it runs essentially parallel to a straight line that runs through the two drive devices. It is also preferred if each of the rotation axes of the two further drive devices that are oriented essentially in the second direction is oriented such that it runs essentially parallel to a straight line that runs through these two further drive devices. It is expedient if the straight lines are laid through the geometric centers or bearing points of the drive devices.
- the compensation of the force generated by the drive devices rotating essentially in the same direction is carried out Torque or torques according to the invention in that the center of mass of the aircraft is positioned in such a way that, taking into account the thrust vectors assigned to the drive devices and predetermined in each case, all forces acting on the aircraft and all torques acting on the aircraft with respect to the center of mass of the aircraft essentially disappear.
- the balance of all forces and torques acting on the aircraft must be achieved. The calculation is carried out using the momentum and angular momentum theorem, which were already given and described in connection with the first aspect of the invention. The statements there apply here accordingly, and this is explained in more detail below.
- three drive devices are arranged around the aircraft fuselage in such a way that they form the corners of a triangle, preferably an equilateral triangle.
- the aircraft fuselage is expediently located in the geometric center of the triangle.
- the first direction is defined by a straight line on which two of the three drive devices lie; the second direction is essentially perpendicular to the first direction.
- the axis of rotation of each of the two drive devices lying on the straight line pointing in the first direction encloses an angle with the said straight line that is in the range between 0° and 45°, expediently between 0° and 30°.
- the geometric center corresponds to the average of all points within the triangle (i.e. the average over the area of the triangle with constant density).
- the angle between the axis of rotation(s) and the straight line pointing in the first direction is selected to be 30°, the axis of rotation(s) of the drive devices point towards (or away from) the geometric center.
- the angle can also be chosen differently for each of the drive devices. It is useful if the straight line is placed through the geometric centers or bearing points of the drive devices.
- n drive devices are arranged around the aircraft fuselage in such a way that they form the corners of an n-gon, n> 3, expediently the corners of a regular n-gon, n> 3.
- the aircraft fuselage is expediently located in the geometric center of the n-gon.
- the first direction is defined by a first straight line on which two of the n drive devices lie; the second direction is defined by a second straight line is defined on which two further drive devices of the n are located.
- the axis of rotation of each of the two drive devices located on the first straight line pointing in the first direction forms an angle with the first straight line which is in the range between 0° and 45°, expediently between 0° and 30°, expediently in the range between 0° and 20°, particularly preferably in the range between 0° and 18°.
- the axes of rotation of different drive devices can form different angles with the first straight line.
- the axis of rotation of each of the two drive devices lying on the second straight line pointing in the second direction encloses an angle with the second straight line which is in the range between 0° and 45°, expediently between 0° and 30°, expediently in the range between 0° and 20°, particularly preferably in the range between 0° and 18°.
- the axes of rotation of different drive devices can enclose different angles with the second straight line.
- angles are chosen as mentioned above, it is possible that the axes of rotation of the drive devices point towards the geometric center of the n-gon (or away from it).
- the aircraft comprises 3, 4, 5, 6, 7, 8, ... drive devices which are arranged around the aircraft fuselage in such a way that they form the corners of an equilateral triangle, a square, a regular 5-, 6-, 7-gon, or regular 8-gon, etc.
- the aircraft fuselage is expediently positioned essentially in the center of the n-gon, whereby the geometric center, but not the center of mass, of the n-gon is the focus here; because according to the invention the center of mass of the aircraft does not necessarily have to coincide with the geometric center (geometric center of gravity).
- the geometric center of an n-gon is defined according to the geometric center of the triangle.
- n 2j, j > 1. It is then further expedient that the aircraft fuselage is located between two opposing drive devices of the regular 2j-gon.
- the axes of rotation assigned to two specific opposing drive devices each point essentially in the direction which is defined by a straight line on which the two specific opposing drive devices lie.
- the aircraft is designed to perform hovering in that two opposing drive devices rotate in substantially the same direction about their associated axis of rotation during hovering. In this case, directions according to the invention can then be defined.
- the angle between the first straight line and the second straight line is in the range between 60° and 100°, preferably between 60° and 90°, particularly preferably between 70° and 90°, particularly preferably between 72° and 90°.
- j > 1 it is particularly advantageous to choose the first straight line and the second straight line (or corresponding directions) such that the angle between the first straight line and the second straight line is 90°. (1 - 1/(2 j + 1)).
- a particularly preferred range for the angle between the first and second straight lines is given by: [90° ⁇ (1 - 1/(2 j + 1)); 90°].
- angles between the axes of rotation of the drive devices arranged along the first straight line and the first straight line are in the range [0°; 90°/(2 j + 1)]
- angles between the axes of rotation of the drive devices arranged along the second straight line and the second straight line are in the range [0°; 90°/(2 j + 1)]
- the propulsion devices are arranged in a (random) regular n-gon (n> 2) around the aircraft fuselage, so that the rotation axes of the propulsion devices are aligned towards the geometric center (or away from it). If n > 3 is to be considered, it is sufficient if the angle between the rotation axis of a propulsion device and the first or second straight line running through it is in the range [0°; 18°].
- the second direction is expediently substantially perpendicular, particularly preferably perpendicular, to the first direction, and two of the at least four drive devices are arranged along the first direction, and the two further of the at least four drive devices are arranged along the second direction which is substantially perpendicular to the first direction.
- the drive devices can be arranged around the aircraft fuselage at the corners of a square.
- each of the aircraft of the first or second aspect if it further comprises a displacement device with which the center of mass of the aircraft can be displaced.
- the aircraft expediently also comprises a fuel tank for supplying the drive devices with fuel and/or a battery for supplying the drive devices with electrical energy, wherein the displacement device is designed to displace fuel from the fuel tank or the battery within the aircraft in order to position the center of mass in such a way that the aircraft performs hovering flight when one or more of the drive devices generate the respective associated specific predetermined thrust vector.
- the center of mass of the aircraft can therefore be dynamically displaced.
- the advantage is that the center of mass of the aircraft can thus be adapted to various flight positions. can be optimally adjusted accordingly.
- the shift of the center of mass can be carried out by an aircraft control system.
- the aircraft according to the first or second aspect comprise a thrust vector control to individually control the thrust vectors of the propulsion devices.
- the aircraft comprises at least four drive devices
- the associated axes of rotation of two of the at least four drive devices are aligned substantially in the first direction
- the associated axes of rotation of two further ones of the at least four drive devices are aligned substantially in the second direction
- each of the two drive devices with axes of rotation aligned in the first direction during hovering rotates substantially in the same direction of rotation about the respectively associated axis of rotation
- each of the two drive devices with axes of rotation aligned in the second direction during hovering rotates substantially in the same direction of rotation about the respectively associated axis of rotation.
- all of the determined associated thrust vectors are selected to be approximately identical.
- each of the drive devices is structurally identical.
- the propulsion devices comprise cyclogyro rotors.
- Each cyclogyro rotor expediently comprises a plurality of rotor blades which can be rotated along a circular path around the respective associated axis of rotation of the drive device or cyclogyro rotor; a pitch mechanism with a coupling device and a bearing device, wherein each of the plurality of rotor blades is pivotally mounted by the bearing device about its rotor blade bearing axis parallel to the axis of rotation of the drive device or cyclogyro rotor.
- the cyclogyro rotor expediently comprises an offset device to which each rotor blade is coupled by the coupling device at a connection point assigned to it.
- the offset device defines an eccentric bearing axis which is mounted at an adjustable offset distance parallel to the axis of rotation of the drive device or cyclogyro rotor.
- Figure 1 shows a perspective view of an aircraft 100 according to the first aspect of the invention with an aircraft body 120 and several drive devices 1F, 1R.
- Each the drive devices 1F, 1R can be mounted on the aircraft body 120 using appropriate mounting or storage devices.
- the illustrated aircraft 100 can be, for example, an aircraft, a manned aircraft, a drone or so-called micro air vehicles (MAVs).
- MAVs micro air vehicles
- a coordinate system is introduced that defines a longitudinal direction 101 or longitudinal axis, a transverse direction 102 or transverse axis and a vertical direction 103 or vertical axis.
- the coordinate system should be firmly anchored to the aircraft 100.
- the reference directions 101, 102, 103 or axes are defined as follows:
- the longitudinal direction 101 corresponds to the direction from the tail 122 to the nose 121 of the aircraft 100.
- the longitudinal direction 101 is thus in a horizontal plane (parallel to the ground when the aircraft 100 is resting on the ground) and extends from the tail 122 (i.e. the rear part) of the aircraft 100 to the bow 121, or nose 121, (i.e.
- the vertical direction 103 or axis corresponds to the direction of gravity when the aircraft 100 is resting on the (flat) ground.
- the vertical direction 103 is perpendicular to the above-mentioned horizontal plane, which includes the longitudinal direction 101.
- the transverse direction 102 or axis is perpendicular to both the longitudinal direction 101 and the vertical direction 103.
- the transverse direction 102 is in the above-mentioned horizontal plane, which includes the longitudinal direction 101, and is perpendicular to the longitudinal direction 101.
- the aircraft 100 shown has four drive devices 1F, 1R.
- the drive devices 1F, 1R shown are cyclogyro rotors.
- the Fig. 1 The aircraft 100 shown can therefore also be referred to as a cyclogyro.
- the propulsion devices are used in connection with Figure 5 described in more detail.
- Each of these drive devices 1F, 1R is mounted so as to be rotatable about an associated axis of rotation 5.
- Each drive device 1F, 1R comprises several rotor blades 2 which are mounted so as to be pivotable about their longitudinal axis. This allows the angle of inclination of the rotor blades 2 to be varied during the rotation of the drive device 1F, 1R.
- rotation speed hereinafter also referred to as rotation speed
- Fig. 1 it can be seen that two of the four drive devices 1F are arranged in the front (nose) area of the aircraft 100, two further drive devices 1R in the rear (tail) area of the aircraft 100.
- the front and rear areas of the aircraft are defined as follows: The total length of the aircraft is measured in the longitudinal direction 101; the frontmost part of the aircraft (i.e. the nose 121 of the aircraft 100) is assigned the relative longitudinal coordinate 0, the rearmost part 122 of the aircraft 100 is assigned the relative longitudinal coordinate 100%.
- the front part or area is defined by the fact that it corresponds to the (longitudinal) area from 0 to 40% of the total length of the aircraft
- the rear part or area is defined by the fact that it corresponds to the (longitudinal) area from 60% to 100% of the total length of the aircraft.
- the two drive devices 1F in the front area lie on a common straight line that runs parallel to the transverse direction 102 or axis; the two drive devices 1R in the rear area also lie on a common straight line that runs parallel to the transverse direction 102 or axis.
- the straight lines mentioned do not necessarily have to be a common axis of rotation to which the drive devices are (rigidly) coupled.
- Each drive device 1F, 1R can rotate via its own axis of rotation 5 assigned to it, and it is also possible for each of the drive devices 1 to be controlled individually, in particular in order to control their rotational speed separately.
- the two drive devices 1R in the rear area of the aircraft are arranged higher than the two drive devices 1F in the front area. This has the advantage that the drive devices 1R in the rear area receive a better airflow and are less affected by the air eddies and turbulence caused by the drive devices 1F in the front area.
- the rotary axes 5 associated with the drive devices 1F, 1R are in the embodiment of Fig. 1 parallel to the transverse direction 102. According to the invention, however, it is not absolutely necessary that all axes of rotation 5 are parallel to each other It is already in accordance with the invention if each of the associated axes of rotation 5 is aligned essentially in the transverse direction 102 of the aircraft body 120. According to the invention, an axis of rotation 5 is aligned essentially in the transverse direction 102 of the aircraft body 120 if the angle enclosed between the axis of rotation 5 and an axis that runs in the transverse direction and intersects the axis of rotation 5 is less than 45°, preferably less than 30°, particularly preferably less than 15°.
- the designation "aligned essentially in the transverse direction” therefore does not exclude the possibility that the axes of rotation 5 are also exactly parallel to one another.
- the aircraft 100 according to the invention is designed in such a way that it can perform a hover flight by rotating each of the four drive devices 1F, 1R shown in the same direction of rotation about the respective associated axis of rotation 5.
- the structural limitations that result from this for the aircraft 100 are explained in connection with the other figures, in particular Figures 3a and 3b , explained.
- the invention requires that each of the drive devices 1 rotates essentially in the same direction of rotation about the respective axis of rotation 5 assigned to it. As already explained in detail in the introduction, this is fulfilled if the scalar product of the vector of the angular velocity of a specific drive device 1F, 1R and a fixed, but arbitrary vector pointing in the transverse direction 102 has the same sign for all drive devices 1R, 1F.
- Figure 2a illustrates the force 7 and the torque 8 acting on a drive device 1 rotating at a certain rotational speed about a rotation axis 5.
- Fig. 2a only the front view of the drive device 1 is shown, and this is schematic. In the case shown, it is assumed that no air flows through the drive device 1. In the case shown, the drive device 1 rotates clockwise. The vector of the angular velocity that corresponds to this rotation therefore points into the plane of the page (according to the right-hand rule).
- the thrust vector F , 7 acting on the drive device 1 is perpendicular to the axis of rotation 5 of the drive device 1. If cyclogyro rotors are used as drive devices 1, the thrust vector F , 7 is determined by the periodic adjustment of the rotor blades of the Cyclogyro rotors are produced. With the help of an offset device of the cyclogyro rotor, the periodic rotor blade adjustment can be changed and thus the thrust vector can be rotated in the entire plane that is normal to the axis of rotation 5 of the cyclogyro rotor and the amount of the thrust vector can be changed. A thrust vector control is expediently used for this purpose.
- the drive device 1 In addition to the thrust vector F , 7, the drive device 1 generates a torque M, 8 about the axis of rotation 5 against the direction of rotation 51.
- This torque M, 8 about the axis of rotation 5 results from the air forces (lift and drag forces), or their tangential components, of the drive device 1; in the case of a cyclogyro rotor, the air forces are primarily due to the rotating rotor blades.
- the drive device 1 In order to maintain a constant rotational speed, the drive device 1 must therefore generate a (drive) torque that counteracts the torque resulting from the air forces.
- this latter torque M, 8 is approximately equal in magnitude to the torque generated by the air forces (ignoring dissipative effects), and also points in the same direction as the latter. Since the torque generated by the air forces counteracts the direction of rotation 51 of the drive device 1, the torque M, 8 applied by the aircraft body also counteracts the direction of rotation 51 of the drive device 1. Assuming that the torque due to the air forces and that of the drive device are essentially equal in magnitude but in opposite directions, the torque M, 8 applied by the aircraft body remains as the net torque due to the rotation of the drive device 1.
- This torque M, 8 is therefore equivalent to the drive torque of the drive device 1.
- the torque M, 8 can therefore be directly related to the size of the thrust vector F , 7.
- the torques already mentioned in connection with Figure 1 mentioned and even further with regard to Figures 3a and 3b The design limitations of the aircraft according to the invention described above can therefore be overcome by using a mathematical-physical relation between the torque M, 8 and the thrust vector F , 7.
- P air the power required to displace the air.
- the plane of the drive device is a plane that runs through the axis of rotation of the drive device and is perpendicular to the direction of air flow, and thus to the thrust vector F .
- the efficiency ⁇ indicates how effectively the drive power P drive is converted into an air flow.
- Figure 2b shows schematically a drive device 1 in forward flight.
- the direction of movement of the aircraft, which comprises the drive device 1 shown, is indicated by the arrow 110.
- the torque M, 8, which corresponds to the drive torque of the drive device 1, has already been described in connection with Figure 2a described. It is shown that the drive device 1 is exposed to air flow 9 from the outside. The air flow 9 changes the aerodynamic properties of the drive device 1 and thus the properties of the generated thrust vector. If the aircraft and thus the drive device 1 is in forward flight, the drive device 1 is actively exposed to air flow from the front.
- the changed properties of the drive device 1 can be approximately explained by the Magnus effect, which states that a rotating round body in a flow experiences a transverse force normal to the flow direction.
- the direction of the transverse force depends on the direction of rotation 51 of the body, here, the drive device 1. Due to the Magnus effect, in addition to the direction of rotation 51 with respect to Figure 2a described thrust force, whose vertical component in Figure 2b designated with F rotor , 71, generates an additional thrust force or an additional contribution F magnus , 72 to the thrust vector in the vertical direction. This increases the total thrust force acting in the vertical direction, the so-called lift force, of the drive device 1. In general, however, the requirement for the lift force of an aircraft is largely constant and an increase is usually not necessary since the main purpose here is to counteract the earth's gravity.
- the contribution F magnus , 72 to the thrust vector that occurs noticeably in forward flight Due to the contribution F magnus , 72 to the thrust vector that occurs noticeably in forward flight, the contribution F rotor , 71 of the thrust vector generated by the drive device 1 can be reduced. This is associated with a reduced power consumption of the drive device 1.
- the Magnus effect replaces part of the thrust of the drive device 1 and thus reduces the power requirement in forward flight compared to hovering.
- the described positive effect of the Magnus effect is utilized in that all drive devices rotate in the same direction about the associated axes of rotation during hovering and forward flight of the aircraft.
- the drive devices rotate essentially in the same direction of rotation, as explained in more detail above.
- the drive devices 1 rotate in essentially the same direction of rotation about the respective associated axis of rotation, the contribution to the lift force by the transverse force F magnus , 72 becomes greater the faster the aircraft flies in forward flight. This means that it is sufficient to configure the aircraft in hovering flight, in which the The air flow velocity 9 is usually at its lowest in order to ensure a stable flight attitude of the aircraft during forward flight.
- FIG 3a an aircraft 100 according to the first aspect of the invention is shown in a highly schematic representation in plan view.
- the position or positioning of the center of mass S , 150 is of central importance for the compensation of the equally directed torques caused by the drive devices 1 rotating in essentially the same direction of rotation. This will be explained in more detail with regard to Figure 3b described.
- Figure 3b shows that in Figure 3a
- this side view only one of the two drive devices 1F arranged in the front area of the aircraft and one of the two drive devices 1R arranged in the rear area of the aircraft can be seen.
- the four drive devices 1F and 1R are arranged in a horizontal plane.
- the following explanations also apply in the case where not all drive devices are in a horizontal plane.
- the axes of rotation assigned to the drive devices 1F and 1R are parallel to each other and parallel to the transverse direction (which points into the plane of the sheet).
- all four drive devices 1F, 1R rotate in the same direction of rotation 51 with a specific associated rotation speed.
- all drive devices 1F and 1R rotate clockwise, which means that all four drive devices are in relation to the Fig. 3a specified transverse direction (y-axis) clockwise.
- the scalar product of each of the angular velocity vectors assigned to the drive devices 1F, 1R with the unit vector in the transverse direction is positive.
- the drive devices rotate in such a way that the surface of the drive devices that first encounters the air flow during forward flight rotates against the direction of gravity.
- the Magnus effect has a particularly positive effect. This applies to any number of drive devices.
- each drive device 1F, 1R generates a thrust vector.
- the thrust vector generated jointly by the two drive devices 1F arranged in the front area is designated by F 1 701
- the thrust vector generated jointly by the two drive devices 1R arranged in the rear area is designated by F 2 , 702.
- all drive devices 1F and 1R rotate in the same direction of rotation 51
- all resulting (drive) torques M 1 , 81 M 2 , 82 also act in the same direction, where M 1 , 81 designates the (drive) torque of both front drive devices 1F, and M 2 , 82 designates the (drive) torque of both rear drive devices 1R.
- the thrust vectors F 1 and F 2 can be adjusted in such a way as to satisfy the two equilibrium conditions.
- the thrust vectors are conveniently adjusted by the thrust vector control.
- l 1 , 131 and l 2 , 132 indicate, in relation to the longitudinal direction, the distance of the center of gravity S , 150 from the drive devices 1F in the front area and 1R in the rear area.
- F S , 160 denotes the weight of the entire aircraft.
- the in Fig. 3b The torques M 1 , 81 and M 2 , 82 shown correspond to the drive torques of the two drive devices 1F and the two drive devices 1R, respectively.
- This means that the amounts of the torques M 1 , 81 and M 2 , 82 are proportional to the generated amounts of the thrust vectors F 1 , 701 and F 2 , 702, respectively.
- the torques cannot therefore be freely controlled.
- the proportionality factor a of each drive device is essentially dependent on the efficiency of the drive device, its angular velocity and other characteristics of the drive device.
- Each drive device can have a different proportionality factor a .
- the values of a for different drive devices of the same type or size are typically of the same order of magnitude. For practical purposes, they are essentially identical.
- Equation (9) can serve as a configuration formula for the aircraft. Equation (9) initially contains three freely selectable variables (from the set of F 1 , F 2 , l 1 , l 2 ), but in a stable flight position equation (7) must also be taken into account, which is why only two of the four variables mentioned above can be freely selected.
- the drive devices 1F and 1R are particularly preferably designed to be structurally identical. This means that they are identical in construction and have, for example, the same size, the same span, the same number of rotor blades, the same diameter and/or generate similar or identical (maximum) thrust forces/thrust vectors.
- F 1 F 2 or F 1 ⁇ F 2 .
- the center of mass S , 150 of the aircraft is shifted in the longitudinal direction from the center l /2 between the front axes of rotation 5 of the front drive devices 1F and the rear axes of rotation 5 of the rear drive devices 1R in the direction of the rear axes of rotation 5 of the rear drive devices 1R, namely by ( a 1 + a 2 )/2.
- a 1 a 2 ⁇ a.
- the center of mass S, 150 can therefore be optimally positioned such that the torques M 1 , 81 or M 2 , 82 generated by the drive devices are balanced purely by the position of the center of mass S, 150.
- the said optimal position is determined by equations (10) and (11).
- a pair / of drive devices can generate a maximum permissible (usually predetermined) thrust force / a maximum permissible thrust vector of F i,max . It is assumed that F i,max is greater than or equal to the thrust forces F i,opt corresponding to the optimal configuration. This is because an aircraft requires at least the thrust forces F i,opt to remain in a stable hover; in the preferred case, each pair of propulsion devices still produces an excess of thrust, which can be used, among other things, to deviate the position of the center of gravity S , 150 from the optimal position.
- F i,max is the maximum thrust force of a propulsion device permitted by the thrust vector control, which must therefore always be greater than or equal to the thrust force for the optimal design F i,opt .
- R max F 1 , max F 2 , min .
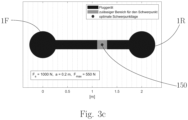
- Figure 3c serves to illustrate the above-described region in which the center of mass S , 150 of the aircraft can expediently be located for implementing the invention according to the first aspect.
- Fig. 3c shows schematically an aircraft with drive devices 1F, 1R, which are arranged along two straight lines, each of which runs parallel to the transverse direction of the aircraft.
- the aircraft expediently comprises four drive devices 1F, 1R, of which two 1F are arranged in the front area and two 1R in the rear area, as already mentioned in connection with Figures 3a and 3b
- FIG. 4 shows a further embodiment of an aircraft 100 according to the first aspect of the invention.
- This Fig. 4 serves primarily to generalize the information related to the Figures 3a, 3b and 3c derived results for any number K > 2 of drive devices 1.
- the longitudinal direction is in Fig. 4 as x-axis 101.
- the K drive devices of the aircraft are arranged along N> 1 straight lines g i .
- the said straight lines are not structural components of the aircraft 100, but merely serve to illustrate the geometric arrangement of the drive devices 1.
- the drive devices 1 are nevertheless on a straight line g i that runs parallel to the transverse direction 102 because their geometric center lies essentially on such a straight line g i ; it is also possible to meet the condition of the arrangement on a parallel straight line, such that the bearing points of the drive devices 1 lie essentially on such a straight line g i .
- the longitudinal positions x i of the straight lines g i are fixed but arbitrary.
- Equation (15) the coordinate X S of the center of mass S , 150 can be calculated if the thrust vectors F i are specified; however, equation (13) provides another condition that must be fulfilled for a stable flight attitude. Therefore not all N thrust vectors F i can be specified arbitrarily, but only N - 1. This means that the position X S of the center of mass S , 150 for a stable flight attitude, especially hovering, is determined when N - 1 thrust vectors are specified. The values of the specified thrust vectors can of course also be the same.
- a maximum permissible range for the (longitudinal, x-)coordinate X S of the center of mass S , 150 can be determined analogously to the considerations for Figure 3b can also be determined for the general case described above using equations (13), (14) and (15).
- FIG. 5 shows an embodiment of the drive devices that can be used in an aircraft according to the invention.
- Each of these drive devices 1 is mounted so as to be rotatable about a rotation axis.
- Each drive device 1 comprises several rotor blades 2 that are mounted so as to be pivotable about their longitudinal axis. This allows the angle of inclination of the rotor blades 2 to be varied during the rotation of the drive device 1.
- the angle of inclination of the rotor blades 2 allows the magnitude and direction of the generated thrust vector to be varied.
- FIG. 5 an inventive design of a drive device 1 is shown in perspective.
- the drive device 1 is cylindrical.
- the drive device 1 shown is a cyclogyro rotor.
- This drive device 1 comprises five rotor blades 2, each with an associated pitch mechanism 3, an offset device 4 and a disk 11.
- Drive devices with a different number of rotor blades are also possible.
- the rotor blades 2 are mounted so as to be rotatable about an axis of rotation of the drive device 1.
- the offset device 4 defines an eccentric bearing axis which is mounted eccentrically with respect to the axis of rotation of the drive device 1.
- the offset device is shown as an offset disk.
- the offset disk is mounted so as to be freely rotatable about the eccentric bearing axis.
- the eccentric bearing of the offset disk 4 implies an eccentric bearing of the pitch mechanism 3.
- the eccentric bearing of the pitch mechanism 3 causes a change in the position of the rotor blades 2 during one revolution about the axis of rotation of the drive device 1.
- Each of the pitch mechanisms 3 shown comprises a coupling device 31 and a bearing device 33.
- Each rotor blade 2 is pivotally mounted by the corresponding bearing device 33.
- the rotor blade 2 is mounted about an axis parallel to the axis of rotation of the drive device 1. This axis is the rotor blade bearing axis 33.
- the rotor blade 2 can be mounted, for example, using a bearing means such as one or more pins, so-called main pins.
- the bearing means is preferably part of the bearing device 33.
- the rotor blade bearing axis 33 can run through the center of mass of the rotor blade 2.
- the rotor blade 2 is mounted at a distance from the center of mass.
- the coupling device 31 of the pitch mechanism 3 couples the rotor blade 2 to the offset device 4 in such a way that the rotor blade 2 executes a pitch movement when it rotates about the axis of rotation of the drive device 1, and under the condition that the eccentric bearing axis does not coincide with the axis of rotation of the drive device 1.
- One end piece of the coupling device 31 is coupled to the offset device 4 at a connection point.
- the other end piece of the coupling device 31 is coupled to the rotor blade 2.
- the offset disk 4 is mounted so that it can rotate freely.
- the axis of rotation of the offset disk 4 preferably runs parallel to the axis of rotation of the drive device 1 at a certain offset distance. This results in the eccentric mounting of the offset disk 4 with respect to the axis of rotation of the drive device 1.
- This offset distance can be adjustable.
- An offset device 4 with adjustable eccentricity can be implemented, for example, using a planetary gear. A pitch movement of the rotor blades 2 occurs when the offset distance is not zero.
- the coupling device 31 is coupled to the rotor blade 2 at a coupling point 32.
- the coupling device 31 can comprise a coupling means.
- Fig. 5 In the drive device 1 shown, the coupling device 31 comprises a connecting rod (English “conrod") and a pin, so-called pitch link pin.
- the pin is a structural design of the coupling means according to the invention.
- the coupling device 31 is coupled to the rotor blade 2 at the coupling point 32 not by a direct connection to the rotor blade 2, but by using a connecting element 61.
- One end of the connecting element 61 is rigidly connected to the rotor blade 2. This connection preferably takes place at the rotor blade bearing point.
- the other end of the connecting element 61 is coupled to the coupling device/connecting rod 31.
- the pitch movement is introduced into the rotor blade 2 via the coupling means with the aid of the connecting rod 31 indirectly via the connecting element 61.
- the coupling device 31 of the pitch mechanism is mounted eccentrically with respect to the axis of rotation of the drive device 1, the coupling point 32 moves on a circular arc relative to the rotor blade bearing axis 33 when the rotor blade 2 rotates about the axis of rotation of the drive device 1. This causes the pitch movement of the rotor blade 2. This is therefore a pendulum movement of the rotor blade 2 about the rotor blade bearing axis 33.
- the diameter of the drive device 1 corresponds to twice the distance from the axis of rotation of the drive device 1 to the rotor blade bearing axis 33 or point. This diameter is relevant for the blade speed during rotation and therefore relevant for the thrust generated.
- the diameter is in the range between 150 mm and 2000 mm, preferably between 300 mm and 500 mm, particularly preferably it is 350 mm.
- the Fig. 5 shown drive device 1 has a disk 11.
- This disk 11 is designed such that it aerodynamically separates the rotor blades 2 from the remaining components of the drive device 1. Such a disk 11 is particularly advantageous in the event that the drive device 1 is operated at higher speeds.
- the length of the rotor blades 2 defines the span of the drive device 1.
- the span of the drive device 1 is the (longitudinal) distance between the two disks 11.
- the span of one of the cyclogyro rotors that can be used according to the invention is expediently a few centimeters to two meters, preferably between 350 and 420 mm. In the aircraft according to the invention, several cyclogyro rotors are advantageously used.
- Their spans preferably differ from one another by a maximum of 25%, expediently by a maximum of 10%.
- Their diameters preferably differ from one another by a maximum of 25%, expediently by a maximum of 10%.
- the in Fig. 5 The rotor blades 2 shown have a symmetrical profile; the invention is not limited to drive devices with rotor blades with a symmetrical profile.
- the drive device 1 generates thrust or a thrust vector due to two coupled rotary movements.
- the first rotary movement is the rotation of the rotor blades 2 around the axis of rotation of the drive device 1.
- This first rotary movement leads to a movement of the rotor blades 2 along a circular path around the axis of rotation of the drive device.
- the rotor blade bearing axes 33 or rotor blade bearing points move along the circular path.
- Each rotor blade bearing axis 33 is parallel to the longitudinal axis of the rotor blades 2.
- the longitudinal axis of the rotor blades 2 is parallel to the axis of rotation of the drive device 1.
- the thrust direction of the drive device 1 is normal to the axis of rotation of the drive device 1.
- all rotor blades 2 should be aligned as best as possible to the direction of flow at all times. This ensures that each rotor blade 2 makes a maximum contribution to the overall thrust.
- the drive device 1 rotates about its axis of rotation, the inclination of each rotor blade 2 is continuously changed due to the pitch mechanism described above.
- Each rotor blade 2 undergoes a periodic change in the angle of inclination or a pendulum movement. This is the pitch movement.
- the coupling point 32 moves on a circular arc around the rotor blade bearing axis 33. This is the second rotary movement.
- the amount and direction of the generated thrust force or the associated thrust vector depend on the inclination of the rotor blades 2. Therefore, the distance of the eccentric bearing of the offset device 4 or the pitch mechanism 3 from the axis of rotation of the drive device 1 influences the amount of the generated thrust force / the generated thrust vector.
- the direction of the generated thrust vector is changed.
- Pitch mechanisms 3 are only shown on one side of the drive device 1, it may be expedient for stability reasons to also attach corresponding pitch mechanisms on the opposite side of the drive device.
- the pitch mechanism can also be attached in the middle of the drive device, for example.
- Figure 6 shows a perspective view of an aircraft 200 according to the second aspect of the invention with an aircraft fuselage 220 and several drive devices 1A and 1B.
- Four drive devices 1A and 1B can be seen, which are arranged around the aircraft fuselage 220.
- Each drive device 1A and 1B is connected to the aircraft fuselage 220 via an arm 221 or 222.
- Each of the drive devices 1A and 1B can be mounted on the arms 221 or 222 with corresponding mounting or storage devices. The presence of arms 221 or 222 is not essential.
- the Propulsion devices 1A and 1B can also be coupled to the aircraft body 220 in other ways.
- the aircraft body 220 and the propulsion devices 1A and 1B are essentially located in one plane.
- the illustrated aircraft200 can be, for example, an aircraft, a manned aircraft, a drone or so-called Micro Air Vehicles (MAVs).
- MAVs Micro Air Vehicles
- a reference system is introduced that defines a first direction 201, a second direction 202 and a vertical direction 203 or vertical axis.
- the vertical direction 203 or axis corresponds to the direction of gravity when the aircraft 200 is resting on the ground.
- the vertical direction 203 is perpendicular to the above-mentioned plane in which the aircraft fuselage 220 and the drive devices 1A and 1B lie.
- the first direction 201 and the second direction 202 or the associated axes lie in the said plane and are thus each perpendicular to the vertical direction. It is essential for the aircraft 200 of the second aspect of the invention considered here that the first direction 201 and the second direction 202 are not parallel to one another. In the exemplary embodiment shown, the first direction 201 and the second direction 202 are perpendicular to one another.
- the aircraft 200 shown has four drive devices 1A and 1B.
- the drive devices 1A and 1B shown are cyclogyro rotors. A more detailed description of cyclogyro rotors has already been given in connection with Fig. 5 given.
- Each drive device 1A and 1B is mounted so as to be rotatable about an associated axis of rotation 5.
- Each drive device 1A and 1B comprises several rotor blades 2 which are mounted so as to be pivotable about their longitudinal axis. This allows the angle of inclination of the rotor blades 2 to be varied during the rotation of the drive device 1A or 1B.
- rotational speed hereinafter also referred to as rotational speed
- angle of inclination of the rotor blades 2 By controlling the rotational speed (hereinafter also referred to as rotational speed) of the drive devices 1A or 1B and controlling the angle of inclination of the rotor blades 2, the amount and direction of the thrust force generated or of the thrust vector describing it can be varied.
- the four drive devices 1A and 1B essentially form the corners of a rectangle or square.
- the body 220 is positioned in the geometric center of this rectangle or square.
- Each of the drive devices 1A and 1B is expediently equidistant from the center or body.
- the arms 221 and 222 can have the same length.
- the drive devices 1A and 1B are arranged at the corners of a square.
- the two drive devices 1A which correspond to opposite corners of said rectangle or square, lie on a common straight line; in the example shown, this straight line is essentially parallel to the first direction 201; likewise, the two drive devices 1B, which also correspond to opposite corners of said rectangle or square, lie on a common straight line that runs essentially parallel to the second direction 202.
- the straight lines mentioned do not necessarily have to be a common axis of rotation to which the drive devices are (rigidly) coupled.
- Each drive device 1A, 1B can rotate via its own axis of rotation 5A, 5B assigned to it, and it is also possible for each of the drive devices 1A, 1B to be controlled individually, in particular in order to control their rotational speed separately.
- the rotary axes 5A associated with the drive devices 1A are in the embodiment of Fig. 6 oriented substantially in the first direction 201.
- the rotation axes 5B associated with the drive devices 1B are in the embodiment of Fig. 6 essentially aligned in the first direction 202.
- the rotation axes 5A, 5B are not aligned exactly parallel to the first direction 201 or second direction 202. In fact, it is already in accordance with the invention if each of the associated rotation axes 5A, 5B is aligned essentially in the first direction 201 or second direction 202.
- a rotation axis 5A is aligned essentially in the first direction 201 if the angle included between the rotation axis 5A and an axis that runs in the first direction 201 and intersects the rotation axis 5A is less than 45°, preferably less than 30°, particularly preferably less than 15°.
- the designation "aligned essentially in the first direction” therefore does not exclude the possibility that the rotation axes 5A are also exactly parallel to the first direction 201.
- the aircraft 200 according to the invention is designed such that it can perform a hover flight in that each of the two drive devices 1A shown rotates essentially in the same direction of rotation about the respective associated axis of rotation 5A, and/or each of the two drive devices 1B shown rotates essentially in the same direction of rotation about the respective associated axis of rotation 5B.
- the structural limitations that result from this for the aircraft 200 are explained in connection with the other figures, in particular Figures 7a and 7b , explained.
- FIG 7a an aircraft 200 according to the second aspect of the invention is shown in a highly schematic representation in plan view.
- the aircraft 200 already described in connection with Figure 6 described aircraft fuselage 220, the drive devices 1A 1 , 1A 2 and 1B 3 , 1B 4 , the axes of rotation 5A and 5B respectively assigned to them, the first direction 201 and second direction 202; the first direction 201 is perpendicular to the second direction 202.
- the center of mass S , 250 of the aircraft 200 is shown.
- the position or positioning of the center of mass S , 250 is of central importance for the compensation of the same directed torques caused by the drive devices 1A 1 , 1A 2 and 1B 3 , 1B 4 rotating in essentially the same direction of rotation. This will be explained in more detail with regard to Figure 7b described.
- the center of mass S , 250 is positioned in such a way that the aircraft 200 can utilize the Magnus effect both in forward flight in the (positive) first direction 201 (here corresponding to the positive x-direction) and in forward flight in the (positive) second direction 202 (here corresponding to the positive y-direction).
- the drive devices 1B 3 , 1B 4 rotate in substantially the same direction of rotation about the associated rotation axes 5B, advantageously clockwise.
- the scalar product of each of the angular velocity vectors assigned to the drive devices 1B 3 , 1B 4 with the unit vector in the second direction is positive.
- the drive devices 1B 3 , 1B 4 rotate in such a way that the surface of the drive devices 1B 3 , 1B 4 that first encounters the air flow in the forward flight rotates against the direction of gravity. If the aircraft 200 moves in the forward flight in the second direction 202, the drive devices 1A 1 , 1A 2 rotate essentially in the same direction of rotation about the associated axes of rotation 5A, advantageously in an anti-clockwise direction. The definition given above applies accordingly. In the Fig. 7a In the coordinate system shown, this means that the scalar product of each of the angular velocity vectors assigned to the drive devices 1A 1 , 1A 2 with the unit vector in the first direction is negative. Regardless of the reference system used, the drive devices 1A 1 , 1A 2 rotate in such a way that the surface of the drive devices 1A 1 , 1A 2 that first encounters the air flow during forward flight rotates against the direction of gravity.
- thrust vectors F 1 , 2001; F 2 , 2002; F 3 , 2003; and F 4 , 2004 are shown, which are generated due to the rotation of the drive devices about the axes of rotation 5A and 5B, respectively.
- the thrust vectors F 1 , 2001; F 2 , 2002; F 3 , 2003; and F 4 , 2004 point out of the image plane, which means that lift is generated.
- Figures 7b and 7c show that in Figure 7a aircraft according to the second aspect of the invention shown in plan view in different side views and in strongly schematic representation.
- the two drive devices 1A 1 , 1A 2 and one of the two drive devices 1B 3 , 1B 4 can be seen.
- the two drive devices 1B 3 , 1B 4 and one of the two drive devices 1A 1 , 1A 2 can be seen.
- the drive devices 1B 3 , 1B 4 are intended to rotate in the same direction of rotation 251 with a certain associated rotational speed.
- the two drive devices 1B 3 , 1B 4 rotate clockwise, as defined above.
- the rotation of each drive device 1B 3 , 1B 4 generates a thrust vector.
- the drive devices 1A 1 , 1A 2 generate thrust vectors F 1 , 2001; or F 2 , 2002.
- the direction of rotation of the drive devices 1A 1 , 1A 2 is not important in the present consideration, which concerns a design of the aircraft that is favorable for forward flight in the first direction 201. For reasons of symmetry, however, it is preferable to design the aircraft in such a way that a stable flight position, in particular a stable forward flight, is possible even with the drive devices 1A 1 , 1A 2 rotating at the same speed. This will be described further below.
- the (magnitudes of) thrust vectors F 1 , F 2 and F 34 can be adjusted to satisfy the two equilibrium conditions.
- the thrust vectors are conveniently adjusted by the thrust vector control.
- the torque M 34 , 280 shown corresponds to the (drive) torque of both drive devices 1B 3 , 1B 4 .
- Each drive device can have a different proportionality factor a .
- the values of a from different drive devices of the same type or size typically assume the same order of magnitude. They are expediently essentially identical.
- F 1 , F 2 denote the magnitudes of the thrust vectors F 1 , 2001 ; F 2 , 2002 generated by the drive devices 1A 1 and 1A 2 respectively; l 1 , 231 denotes the distance, determined with respect to the first direction, of the thrust vector F 1 , 2001 from the center of mass S , 250 of the aircraft (whereby this distance l 1 can be identified with the distance, with respect to the first direction, between the center of mass S , 250 of the aircraft and the geometric center along the axis of rotation 5A of the drive device 1A 1 ; in other words: l 1 is the distance, with respect to the first direction, from the center of mass S , 250 of the aircraft to half the wingspan of the drive device 1A 1 ); l 2 , 232 the distance of the thrust vector F 2 , 2002 from the center of mass S , 250 of the aircraft, determined with respect to the first direction (whereby this distance l 2 can be identified with the distance with respect to the first direction between the center of mass S , 250 of the aircraft
- Equation (19) can serve as a configuration formula for the aircraft. Equation (19) initially contains four freely selectable variables (from the set of F 1 , F 2 , F 34 , l 1 , l 2 , l 34 ), but in a stable flight attitude equation (17) must also be taken into account, which is why only three of the four variables mentioned above can be freely selected.
- M 12 , 285 is the total torque generated by the drive devices 1A 1 , 1A 2 .
- F 3 , F 4 denote the magnitudes of the thrust vectors F 3 , 2003; F 4 , 2004 generated by the propulsion devices 1B 3 and 1B 4 respectively (cf. Fig. 7a ); l 3 , 236, the distance of the thrust vector F 3 from the center of mass S , 250 of the aircraft, determined in the second direction (whereby this distance l 3 can be identified with the distance in the second direction between the center of mass S , 250 of the aircraft and the geometric center of the drive device 1B 3 along the axis of rotation 5B; in other words: l 3 is the distance in the second direction from the center of mass S , 250 of the aircraft to half the span of the drive device 1B 3 ); l 4 , 237, the distance of the thrust vector F 4 from the center of mass S , 250 of the aircraft, determined in the second direction (whereby this distance l 4 can be identified with the distance in the second direction between the center of mass S , 250 of the aircraft and the geometric center of the drive device 1B 4 along the
- a further, useful boundary condition arises if it is required that the propulsion devices are preferably mounted centrally on the aircraft fuselage 220.
- the next step is to determine the number of freely definable thrust vectors using equations (17), (18), (20) and (21). Assuming that the positions of the drive devices are fixed, the equations in question have the following unknowns: F 1 , F 2 , F 3 , F 4 , l 12 and l 34 . It must also be noted that equations (17) and (20) specify the same restriction. This means that there are three equations for six unknowns. The center of mass is to be determined using l 12 and l 34 ; equations (17), (18), (20) and (21) therefore specify another thrust vector; three of the four thrust vectors F 1 , F 2 , F 3 can therefore be specified as desired. If further boundary conditions are taken into account, the number of freely definable thrust vectors is reduced accordingly.
- the drive device 1A 1 , 1B 3 arranged in the positive first direction or positive second direction must generate more thrust than the drive device 1A 2 , 1B 4 arranged in the negative first direction or negative first direction, i.e. F 1 > F 2 and/or F 3 > F 4 .
- the drive devices arranged in the positive direction must therefore be designed larger than the drive devices arranged in the negative direction.
- the drive devices arranged at the front in the forward flight direction must be designed larger than the drive devices arranged at the rear.
- the center of mass S , 250 will therefore tend to move in the positive first and/or second direction, which has the consequence that l 1 ⁇ l 2 and/or l 3 ⁇ l 4 , and the difference between the required thrust vectors F 1 and F 2 or F 3 and F 4 of the propulsion devices 1A 1 , 1A 2 or 1B 3 , 1B 4 increases further.
- the two drive devices 1A 1 , 1A 2 are particularly preferably designed to be structurally identical and/or the two drive devices 1B 3 , 1B 4 are designed to be structurally identical.
- the two drive devices 1B 3 , 1B 4 are designed to be structurally identical.
- they are structurally identical and have, for example, the same size, the same span, the same number of rotor blades and/or generate similar or identical (maximum) thrust forces/thrust vectors.
- the center of mass S , 250 can therefore be optimally positioned such that the torques generated by the drive devices are compensated purely by the position of the center of mass S , 250 .
- the said optimal position is determined by equations (27a) and/or (27b).
- the center of mass S , 250 of the aircraft can be displaced from the geometric center of the aircraft fuselage 220 in such a way that the conditions (17), (20), (25a), (25b) for stable hovering are met at certain predetermined, even different, thrust vectors/thrust forces of individual propulsion devices.
- one of the drive devices 1A 1 , 1A 2 , 1B 3 , 1B 4 can generate a maximum permissible (usually predetermined) thrust force / maximum permissible thrust vector of F i,max . It is assumed that F i,max is greater than or equal to the thrust forces F i,opt corresponding to the optimal configuration (as already described in more detail in connection with the first aspect of the invention).
- the permissible range (28) in the first direction can also be specified with respect to the axes of rotation of the drive devices 1B 3 , 1B 4 or the straight line that runs through the drive devices 1B 3 , 1B 4 .
- the range is then specified using the distance l 34 and corresponding limits l 34 ,min and l 34 ,max .
- the permissible range (29) in the second direction can also be specified with respect to the axes of rotation of the drive devices 1A 1 , 1A 2 or the straight line that runs through the drive devices 1A 1 , 1A 2 . Then the Specify the range using the distance l 12 and corresponding limits l 12, min and l 12 ,max .
- Figure 7d serves to illustrate the above-described region in which the center of mass S , 250 of the aircraft can expediently be located for implementing the invention according to the second aspect.
- a range is now defined in which the position of the center of mass S , 250 so that the torque compensation can be compensated by the thrust forces / thrust vectors of the drive devices 1A 1 , 1A 2 , 1B 3 , 1B 4 .
- l 1 max R min + 3 ⁇ l + R min + 1 ⁇ 2 ⁇ a
- R max + 1 ⁇ 4 1,05 m 1,05 m ⁇ l 1 ⁇ 1,15 m
- the center of mass in the first direction is conveniently located 1.05 to 1.15 m from the geometric center of the front of the two propulsion devices 1A 1 in the forward flight direction.
- this result can also be expressed as follows: the center of mass in the first direction is conveniently located 0.05 to 0.15 m from the axis of rotation of the propulsion devices 1B 3 , 1B 4 or the straight line that runs through the two propulsion devices 1B 3 , 1B 4 .
- the permissible range for l 3 is the same. If both conditions are taken into account, the centre of mass S , 250 is conveniently positioned with respect to the plane defined by the propulsion devices and the aircraft fuselage in a square area determined by the limits given. Positioning with respect to the vertical direction is not restricted.
- the second aspect of the invention is not limited to aircraft with four drive devices. It is also possible that, for example, more than two drive devices are arranged along one direction or that some drive devices are arranged on straight lines parallel to one another.
- r i , i ⁇ ⁇ 1, ..., n ⁇ be the position vectors for the i-th thrust vector of the corresponding drive devices 1C.
- s be the position vector for the center of mass S , 250 of the aircraft.
- the propulsion devices rotate with the angular velocity ⁇ i , i ⁇ ⁇ 1,..., n ⁇ , where these are vectors that lie in the xy plane.
- a suitable range with regard to the plane in which the drive devices 1C and the aircraft fuselage 220 lie can thus also be determined in the more general case considered here by varying the thrust vectors of one or more of the n drive devices 1C and requiring that the center of gravity S , 250 must be positioned in such a way (cf. equation (33)) that the torque compensation according to equation (32) can be compensated by the thrust forces / thrust vectors of the drive devices. For this purpose, it may be appropriate to drive one or more of the drive devices with the maximum permissible thrust.
- the centre of mass is thus preferably (i) displaced from the geometric center with respect to a direction perpendicular to the first direction and lying in the plane defined by the propulsion devices and the aircraft fuselage, and/or (ii) displaced from the geometric center with respect to a direction perpendicular to the second direction and lying in the plane defined by the propulsion devices and the aircraft fuselage.
- Figure 9a shows an embodiment according to the second aspect of the invention, in which three drive devices 1C 1 , 1C 2 , 1C 3 are arranged around the aircraft fuselage 220 of the aircraft in such a way that they form the corners of an equilateral triangle. It is shown that the drive devices 1C and 1C 2 are arranged on a straight line g 1 ; g 1 defines the first direction according to the invention.
- the drive device 1C 3 is arranged in the embodiment shown on a straight line g 2 that is perpendicular to the straight line g 1 and runs through the geometric center G of the aircraft, in this case through the geometric center G of the equilateral triangle.
- the straight line g 2 defines the second direction according to the invention.
- the axes of rotation 5C 1 , 5C 2 , 5C 3 of the drive devices 1C 1 , 1C 2 and 1C 3 point towards (or away from) the geometric center G.
- the axis of rotation 5C 3 is aligned exactly parallel to the second direction defined by g 2 .
- the axes of rotation 5C 1 , 5C 2 are not exactly parallel to the first direction defined by g 1 .
- angles fall under the inventive concept of axes of rotation aligned essentially in the first direction.
- the angles can also be chosen to be smaller. If the drive devices 1C 1 , 1C 2 rotate about these axes of rotation essentially in the same direction of rotation as defined above, the inventive result still occurs here when the aircraft moves in particular along the second direction defined by g 2 . If the drive devices 1C 1 , 1C 3 rotate about the associated axes of rotation 5C or 5C 3 essentially in the same direction of rotation, the advantage according to the invention has a positive effect, in particular during a movement along the angle bisector 1C 1 - G -1C 3 .
- Figure 9b shows an aircraft according to the second aspect of the invention, in which seven drive devices 1C 1 , ..., 1C 7 are arranged in a plane around the aircraft fuselage 220.
- the drive devices 1C 1 , ..., 1C 7 are arranged such that they form the corners of a regular heptagon.
- Each of the drive devices is mounted so as to be rotatable about an associated axis of rotation 5C 1 , ..., 5C 7.
- the axes of rotation 5C 1 , ..., 5C 7 point to the geometric center G of the aircraft or of the heptagon.
- the associated axes of rotation 5C 1 , ..., 5C 2j+1 should point towards (or away from) the geometric center G.
- Figure 9c shows an aircraft according to the second aspect of the invention, in which six drive devices 1C 1 , ..., 1C 6 are arranged in a plane around the aircraft fuselage 220.
- the drive devices 1C 1 , ..., 1C 6 are arranged such that they form the corners of a regular hexagon.
- Each of the drive devices is mounted so as to be rotatable about an associated axis of rotation 5C 1 , ..., 5C 6.
- the axes of rotation 5C 1 , ..., 5C 6 point to the geometric center G of the aircraft or the hexagon.
- the aircraft fuselage 220 is located between two opposite drive devices of the regular 2 j -gon.
- the associated axes of rotation 5C 1 , ..., 5C 2j should point towards (or away from) the geometric center G.
- the axes of rotation of the drive devices arranged on the straight lines g 1 and g 2 are aligned (mathematically exactly) parallel in the first and second directions, respectively.
- the first and second directions are substantially perpendicular, especially perpendicular, to each other; this is always possible when the drive devices form the corners of a 4j -gon.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Remote Sensing (AREA)
- Transmission Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Toys (AREA)
Description
- Die Erfindung betrifft ein Fluggerät sowie Verfahren zur Herstellung und Steuerung des Fluggeräts. Insbesondere betrifft die Erfindung ein Fluggerät, das einen stabilen Schwebeflug bei in gleicher Richtung rotierenden Antriebsvorrichtungen, insbesondere Cyclogyro-Rotoren, einnehmen kann.
- Fluggeräte, die Cyclogyro-Rotoren als Antriebsvorrichtungen verwenden, werden als Cyclogyros bezeichnet. Bei Cyclogyros handelt es sich darüber hinaus, genauso wie bei Helikoptern, um sog. Senkrechtstarter (auch VTOL-Fahrzeuge genannt, von englisch "Vertical Take-Off and Landing"), also um Fluggeräte, die in der Lage sind, senkrecht ohne Start- und Landebahn zu starten und zu landen.
- Ein Cyclogyro-Rotor basiert auf dem Prinzip der Schuberzeugung mit rotierenden Flügeln, die dann Rotorblätter genannt werden. Im Gegensatz zu klassischen rotierenden Flügeln, wie etwa jenen, die bei der Antriebsvorrichtung eines Helikopters zum Einsatz kommen, ist die Rotationsachse der Flügel eines Cyclogyro-Rotors parallel zur Längsachse der Flügel / Rotorblätter ausgerichtet. Die Schubrichtung des gesamten Cyclogyro-Rotors liegt normal zur Rotationsachse.
- Im stationären Betrieb, wie etwa dem Schwebeflug oder dem Vorwärtsflug mit konstanter Geschwindigkeit, sollen alle Rotorblätter des Cyclogyro-Rotors idealerweise zu jedem Zeitpunkt bestmöglich zur Strömungsrichtung ausgerichtet sein, um jeweils einen maximalen Beitrag zum gesamten Schub bei minimal erforderlicher Antriebsleistung zu leisten. Die maximale Neigung der Rotorblätter gegenüber der Strömungsrichtung beeinflusst direkt den Betrag des erzeugten Schubes. Durch die Drehung des Rotors muss die Neigung jedes Rotorblatts während einer Umdrehung laufend geändert werden. Jedes Rotorblatt eines Cyclogyro-Rotors vollzieht somit eine periodische Änderung des Neigungswinkels. Diese periodische Änderung des Neigungswinkels wird als Pitch-Bewegung bezeichnet.
- Zur Erzeugung der Pitch-Bewegung sind unterschiedliche Pitch-Mechanismen bekannt. Beispielweise kann jedes Rotorblatt über ein oder mehrere Pleuel mit einer exzentrischen Lagerungsachse verbunden werden. Die sich daraus ergebende Pitch-Bewegung eines Rotorblatts wiederholt sich dabei zyklisch mit jeder Rotorumdrehung.
- Diverse Ausgestaltungen von Antriebsvorrichtungen für Cyclogyros sind etwa in den europäischen Patentanmeldungen veröffentlicht unter Nr.
EP 3548378 A1 undEP 3715249 A1 beschrieben. - Durch die periodische Verstellung der Rotorblätter wird ein Schubvektor normal zur Drehachse des Rotors erzeugt. Mit Hilfe einer Offset-Vorrichtung wird die periodische Rotorblattverstellung verändert, und somit kann der Schubvektor in der gesamten Ebene, welche normal zur Drehachse des Rotors steht, gedreht werden (Schubvektorsteuerung). Zusätzlich zum Schubvektor erzeugt der Rotor ein Drehmoment um die Drehachse entgegen der Drehrichtung des Rotors resultierend aus den Tangentialkomponenten der an den Rotorblättern angreifenden Luftkräften, nämlich den Auftriebs- und Luftwiderstandskräften.
- Wird der Rotor von außen mit Luft angeströmt, ändern sich die aerodynamischen Eigenschaften und somit die Eigenschaften des erzeugten Schubvektors. Befindet sich der Rotor im Vorwärtsflug, wird er von vorne aktiv mit Luft angeströmt. Die veränderten Eigenschaften können näherungsweise mit dem Magnus-Effekt erklärt werden. Dieser besagt: "Ein rotierender runder Körper in einer Strömung erfährt eine Querkraft normal zur Strömungsrichtung."
- Die Richtung der Querkraft ist abhängig von der Drehrichtung des Körpers bzw. hier: des Cyclogyro-Rotors.
- Bei beispielsweise aus dem Artikel von I.S. Hwang et al.: "Development of a Four-Rotor Cyclocopter" aus Journal of Aircraft, Vol. 45, Nr. 6, November-Dezember 2008, Seiten 2151 ff. und dem Artikel von M. Benedict et al.: "Experimental Optimization of MAV-Scale Cycloidal Rotor Performance" aus Journal of the American Helicopter Society 56, 022005 (2011) bekannten Fluggeräten bzw. Cyclogyros drehen Rotoren jedoch in entgegengesetzter Richtung bei gleichbleibender Anströmung. In diesem Fall, d.h., wenn die Rotoren in entgegengesetzter Richtung drehen, wirken die durch den Magnus-Effekt hervorgerufenen Querkräfte der Rotoren nicht in dieselbe Richtung und können somit die gesamte Schubkraft verringern oder den Leistungsbedarf bei geforderter gleicher Auftriebskraft erhöhen. Bei höheren Vorwärtsgeschwindigkeiten und entgegengesetzter Drehrichtung ist es somit möglich, dass die negative Auswirkung des Magnus-Effekts vom Rotor nicht mehr kompensiert werden kann. Dadurch ist das Fluggerät nicht mehr flugfähig und der Rotor kann nicht als auftriebserzeugende Komponente eingesetzt werden.
-
US 10,384,776 B2 -
US 2019/071174 A1 betrifft ein vertikal startendes und landendes (VTOL) Fahrzeug, das einen Rumpf, ein Seitenleitwerk, vier kippbare Flügel, einen elektrischen Generator, der flüssigen Treibstoff verwendet, wiederaufladbare elektrische Energiespeichervorrichtungen, Sensoren, die Luftströmungssensoren umfassen, und ein Betätigungs- und Rückkopplungssteuersystem umfasst. Die vier Kippflügel können unabhängig voneinander und kontrolliert um zwei Achsen parallel zur Nickachse rotieren, wobei eine dieser Achsen vor dem Schwerpunkt des Fahrzeugs und die andere dahinter liegt. -
US 2020/086984 A1 beschreibt verschiedene Konfigurationen der Antriebsmechanismen eines Luftfahrzeugs. Als Reaktion auf einen Fehler oder Ausfall eines Antriebsmechanismus können beispielsweise die verbleibenden Antriebsmechanismen modifiziert werden, um die Kontrolle und Sicherheit des Luftfahrzeugs aufrechtzuerhalten. -
EP 3 354 566 A1 betrifft eine Schuberzeugungseinheit zur Erzeugung von Schub in einer vorgegebenen Richtung, umfassend mindestens zwei Rotorbaugruppen und eine Ummantelung, wobei jede der mindestens zwei Rotorbaugruppen eine zugehörige Rotorebene definiert, wobei eine erste Rotorbaugruppe der mindestens zwei Rotorbaugruppen für den Betrieb in einem störungsfreien Betriebsmodus der Schuberzeugungseinheit und eine zweite Rotorbaugruppe der mindestens zwei Rotorbaugruppen zum Betrieb zumindest bei einem Ausfall der ersten Rotorbaugruppe vorgesehen ist, und wobei die Ummantelung höchstens eine der mindestens zwei Rotorbaugruppen aufnimmt. - Aufgabe der vorliegenden Erfindung ist es daher, ein Fluggerät bereitzustellen, das auch bei hohen Geschwindigkeiten im Vorwärtsflug eine stabile Fluglage einzunehmen vermag.
a - Diese Aufgabe wird durch das Fluggerät mit den Merkmalen gemäß Anspruch 1, durch das Fluggerät mit den Merkmalen gemäß Anspruch sowie die Verfahren zur Steuerung eines Fluggeräts gemäß Ansprüchen 17 bzw. 18 gelöst. Vorteilhafte Ausgestaltungen der vorliegenden Erfindung sind in den Unteransprüchen 2 bis 4, 6 bis 16 und 19 bis 22 angegeben.
- Gemäß einem ersten Aspekt der Erfindung wird ein Fluggerät bereitgestellt, das folgende Komponenten umfasst: einen Fluggerätekörper, der eine Längsrichtung, eine Vertikalrichtung und eine Querrichtung definiert, wobei die Längsrichtung der Richtung vom Heck zur Nase des Fluggeräts entspricht, die Vertikalrichtung mit der Richtung der Erdanziehungskraft übereinstimmt, wenn das Fluggerät am Boden ruht, und die Querrichtung senkrecht auf der Längsrichtung und der Vertikalrichtung steht, und mindestens zwei Antriebsvorrichtungen, die um eine jeweils zugeordnete Drehachse drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen. Dabei ist eine erste Anzahl von Antriebsvorrichtungen entlang einer ersten Geraden, die parallel zur Querrichtung verläuft, angeordnet, und eine zweite Anzahl der Antriebsvorrichtungen ist entlang einer zweiten Geraden, die parallel zur Querrichtung verläuft, angeordnet. Die erste Gerade ist von der zweiten Geraden beabstandet, und der Massenschwerpunkt des Fluggeräts ist bezüglich der Längsrichtung zwischen der ersten Geraden und der zweiten Geraden positioniert. Das Fluggerät ist dabei dazu ausgelegt, einen Schwebeflug durchzuführen, bei dem sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, dadurch, dass im Schwebeflug jede der zugeordneten Drehachsen im Wesentlichen in Querrichtung des Fluggerätekörpers ausgerichtet ist, und jede der mindestens zwei Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht.
- Erfindungsgemäß ist eine Drehachse im Wesentlichen in Querrichtung des Fluggerätekörpers ausgerichtet, wenn der Winkel, der zwischen der Drehachse, und einer Achse, die in Querrichtung verläuft und die Drehachse schneidet, eingeschlossen ist, geringer als 45°, bevorzugt geringer als 30°, besonders bevorzugt geringer als 15°, ist.
- Im Sinne der Erfindung ist es somit nicht erforderlich, dass sämtliche Drehachsen im Schwebeflug mathematisch exakt parallel ausgerichtet sind. Es kann sogar zweckmäßig sein, wenn der Winkel zwischen einer Drehachse und einer Achse, die in Querrichtung verläuft und die Drehachse schneidet im Bereich zwischen 5° und 30°, besonders bevorzugt, zwischen 10° und 20° liegt.
- Des Weiteren drehen erfindungsgemäß die Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung, wenn das Skalarprodukt vom Vektor der Winkelgeschwindigkeit einer bestimmten Antriebsvorrichtung und einem fest vorgegebenen, aber beliebigen in Querrichtung zeigenden Vektor für alle Antriebsvorrichtungen dasselbe Vorzeichen besitzt. Das heißt also, um zu überprüfen, dass alle betrachteten Antriebsvorrichtungen bzw. jede der betrachteten Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung drehen, wird zunächst ein Vektor in Querrichtung fest vorgegeben. Anschließend wird für eine erste Antriebsvorrichtung das Skalarprodukt von deren Winkelgeschwindigkeitsvektor und dem fest vorgegebenen Vektor berechnet; danach für eine zweite Antriebsvorrichtung das Skalarprodukt von deren Winkelgeschwindigkeitsvektor und dem fest vorgegebenen Vektor; etc. Abschließend werden lediglich die Vorzeichen (Plus oder Minus) der so berechneten Skalarprodukte verglichen. Sind sämtliche Vorzeichen gleich, drehen die betrachteten Antriebsvorrichtungen bzw. dreht jede der betrachteten Antriebsvorrichtungen im Sinne der Erfindung im Wesentlichen in dieselbe Drehrichtung.
- Im Sinne der Erfindung ist daher weder erforderlich, dass im Schwebeflug sämtliche Drehachsen mathematisch exakt parallel ausgerichtet sind, noch, dass sämtliche Antriebsvorrichtungen mit derselben Dreh- bzw. (betragsmäßigen) Winkelgeschwindigkeit um die Drehachse rotieren.
- Dadurch, dass das Fluggerät derart ausgelegt ist, einen Schwebeflug bei im Wesentlichen in dieselbe Richtung drehenden Antriebsvorrichtungen durchzuführen, wird eine Reduzierung der Leistungsaufnahme der Antriebsvorrichtungen erreicht. Vereinfacht ausgedrückt ersetzt der erfindungsgemäß auftretende Magnus-Effekt einen Teil der Schubkraft der Antriebsvorrichtungen und reduziert damit den Leistungsbedarf im Vorwärtsflug gegenüber dem Schwebeflug. Weil somit mehr Restleistung für die Antriebsvorrichtungen im Vorwärtsflug übrig bleibt, erhöht sich insbesondere die Agilität des Fluggeräts im Vorwärtsflug.
- Der Magnus-Effekt besagt, dass ein rotierender runder Körper in einer Strömung eine Querkraft normal zur Strömungsrichtung erfährt. Im Falle der erfindungsgemäßen Antriebsvorrichtungen, die im Wesentlichen in dieselben Richtung drehen, kann durch diesen Effekt ein zusätzlicher Schubvektor bzw. eine zusätzliche Schubkraft in vertikaler Richtung erzeugt werden. Somit wird die gesamte Auftriebskraft der Antriebsvorrichtungen erhöht. Der Magnus-Effekt ersetzt einen Teil der von der Antriebsvorrichtung aufzubringenden Schubkraft und reduziert somit den Leistungsbedarf im Vorwärtsflug gegenüber dem Schwebeflug. Befindet sich nun der Rotor im Vorwärtsflug, wird er von vorne aktiv mit Luft angeströmt. In der erfindungsgemäßen Konfiguration, bei der die Antriebsvorrichtungen im Wesentlichen in dieselbe Richtung drehen, wirkt bei gleichbleibender Anströmung die zusätzliche Querkraft des Magnus-Effektes im Wesentlichen in dieselbe Richtung wie die Schubkraft der Antriebsvorrichtungen und erhöht somit die gesamte Schubkraft oder verringert den Leistungsbedarf bei geforderter gleicher Auftriebskraft. Im Vorwärtsflug, insbesondere bei höheren Vorwärtsgeschwindigkeiten und im Wesentlichen gleicher Drehrichtung ist es somit möglich, dass die positive Auswirkung des Magnus-Effekts eine geringere Leistung und/oder Drehgeschwindigkeit der Antriebsvorrichtungen erfordert, um das Fluggerät in einer stabilen Fluglage zu halten.
- Besonders bevorzugt ist das Fluggerät weiter dazu ausgelegt, dass im Schwebeflug der Massenschwerpunkt des Fluggeräts derart positioniert ist, dass dadurch bewirkt wird, dass sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn eine oder mehrere der Antriebsvorrichtungen einen ihnen jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen. Mit dieser Anweisung ist die Einschränkung verbunden, dass der Massenschwerpunkt des Fluggeräts bezüglich der Längsrichtung innerhalb eines Bereichs liegen muss, der dadurch bestimmt ist, dass das Fluggerät den Schwebeflug durchführen kann, wenn eine oder mehrere der Antriebsvorrichtungen mit maximaler Schubkraft bzw. maximalem Schubvektor angetrieben werden. Anders ausgedrückt: Befindet sich der Massenschwerpunkt innerhalb des besagten Bereichs, sind die Antriebsvorrichtungen in der Lage, entsprechende Schubvektoren zu erzeugen, damit das Fluggerät den Schwebeflug ausführen kann.
- Im Schwebeflug ist die Anströmgeschwindigkeit grundsätzlich geringer als im Vorwärtsflug. Dadurch, dass für das erfindungsgemäße Fluggerät die Schubvektoren der Antriebsvorrichtungen für den Schwebeflug vorgegeben werden, und die Position des Massenschwerpunktes für den Schwebeflug bestimmt wird, wird sichergestellt, dass auch im Vorwärtsflug eine stabile Fluglage möglich ist. Wie vorstehend ausgeführt, ist der erfindungsgemäße positive Effekt, der durch den Magnus-Effekt bewirkt wird, um so größer, je größer die Anströmgeschwindigkeit ist. Daher wird durch die erfindungsgemäße Konfiguration des Fluggeräts im Schwebeflug sichergestellt, dass das Fluggerät insbesondere im Vorwärtsflug eine stabile Fluglage einnehmen kann, weil im Vorwärtsflug der Magnus-Effekt zu einer stärkeren Erhöhung des Schubvektors führt als im Falle des Schwebeflugs.
- Bei der Auslegung und Konfiguration eines erfindungsgemäßen Fluggerätes mit Antriebsvorrichtungen müssen alle Kräfte und Drehmomente der Antriebsvorrichtungen berücksichtigt werden. Grundsätzlich wird die Schubkraft bzw. der Schubvektor dazu verwendet, die benötigte Auftriebskraft zu erzeugen und/oder die Fluglage des Fluggerätes zu regeln. Zweckmäßigerweise umfasst das Fluggerät dazu eine Schubvektorsteuerung, die die benötigte Schubkraft bzw. benötigten Schubvektoren im Schwebeflug und/oder im Vorwärtsflug regelt.
- Jede der erfindungsgemäßen Antriebsvorrichtungen erzeugt ein Drehmoment entgegen der Drehrichtung. Dieses Drehmoment um die Drehachse entgegen der Drehrichtung der Antriebsvorrichtung resultiert aus, u.a. durch den Luftwiderstand bewirkten, tangentialen Luftkräften. Um eine konstante Drehgeschwindigkeit aufrechtzuerhalten, muss die Antriebsvorrichtung somit ein (Antriebs-)Drehmoment erzeugen, das dem aufgrund der tangentialen Luftkräfte resultierenden Drehmoment entgegenwirkt. Damit die Antriebsvorrichtung allerdings ein solches (Antriebs-)Drehmoment auch während der Flugphase erzeugen kann, ist ein weiteres Drehmoment erforderlich, das der Fluggerätekörper (gemäß dem Prinzip von actio = reactio) aufbringen muss, um die Antriebsvorrichtung in der Luft "abzustützen". Dieses letztgenannte Drehmoment ist, um eine konstante Rotationsgeschwindigkeit gegen die Luftkräfte aufrechtzuerhalten, (bei Vernachlässigung dissipativer Effekte) betragsmäßig etwa gleich groß wie das durch die tangentialen Luftkräfte erzeugte Drehmoment, und zeigt auch in dieselbe Richtung wie letzteres. Da das durch die Luftkräfte erzeugte Drehmoment der Drehrichtung der Antriebsvorrichtung entgegenwirkt, wirkt auch das vom Fluggerätekörper aufgebrachte Drehmoment der Drehrichtung der Antriebsvorrichtung entgegen. Unter der Annahme, dass das Drehmoment durch die Luftkräfte und jenes der Antriebsvorrichtung im Wesentlichen betragsmäßig gleich, aber entgegengesetzt gerichtet sind, bleibt aufgrund der Rotation der Antriebsvorrichtung als Netto-Drehmoment das vom Fluggerätekörper aufgebrachte Drehmoment übrig.
- Die Kompensation dieses Drehmoments bzw. dieser Drehmomente erfolgt erfindungsgemäß dadurch, dass der Massenschwerpunkt des Fluggeräts dermaßen positioniert ist, dass unter Berücksichtigung der den Antriebsvorrichtungen jeweils zugeordneten und vorgegebenen Schubvektoren, im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden.
- Dadurch, dass erfindungsgemäß die Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung drehen, wirken die vorstehend beschriebenen durch den Fluggerätekörper bewirkten Drehmomente aller dieser Antriebsvorrichtungen auch im Wesentlichen in die gleiche Richtung. Die Drehmomente addieren sich also und heben sich nicht gegenseitig auf.
- Um eine stabile Fluglage im Schwebeflug sowie im Vorwärtsflug erreichen zu können, muss das Gleichgewicht aller Kräfte und Drehmomente, welche auf das Fluggerät wirken, erfüllt werden. Die Berechnung erfolgt mittels Impuls- und Drallsatz.
- Der Impulssatz lautet:
- Der Drallsatz sagt aus

- Bei der Forderung nach einer stabilen Fluglage (Schwebeflug, gleichmäßige Geschwindigkeit im Vorwärtsflug, usw.) müssen der Beschleunigungsvektor r̈ s und die zeitliche Änderung des Drehimpulsvektors L̇ s null sein. Somit muss sowohl die Summe aller äußeren Kräfte (F) als auch die Summe aller Drehmomente um den Massenschwerpunkt ( M s ) jeweils entsprechend null ergeben. Die Kräfte, die auf das Fluggerät im Schwebeflug wirken, sind die Schwerkraft sowie die Schubkräfte der Antriebsvorrichtungen. Die Drehmomente, die bezüglich des Massenschwerpunkts des Fluggeräts wirken, sind die Drehmomente, die durch die Schubvektoren der Antriebsvorrichtungen, die in zugehörigen Abständen vom Massenschwerpunkt des Fluggeräts gelagert sind, erzeugt werden, sowie die (Stütz-)Drehmomente, die vom Fluggerätekörper erzeugt werden, und sämtlich im Wesentlichen in dieselbe Richtung zeigen.
- Das Kräfte- und Drehmomente-Gleichgewicht kann somit dadurch erfolgen, dass die Schubkräfte bzw. Schubvektoren der Antriebsvorrichtungen und deren Abstände zum Massenschwerpunkt des Fluggeräts entsprechend gewählt werden.
- Bevorzugt ist die erste Anzahl der Antriebsvorrichtungen bezüglich der Längsrichtung in einem vorderen Bereich des Flüggeräts angeordnet, und die zweite Anzahl der Antriebsvorrichtungen bezüglich der Längsrichtung in einem hinteren Bereich des Fluggeräts angeordnet. Bevorzugt umfasst das Fluggerät drei Antriebsvorrichtungen. Besonders bevorzugt umfasst das Fluggerät vier Antriebsvorrichtungen, wobei zwei der Antriebsvorrichtungen bezüglich der Längsrichtung in einem vorderen Bereich des Fluggeräts angeordnet sind, und zwei weitere Antriebsvorrichtungen bezüglich der Längsrichtung in einem hinteren Bereich des Fluggeräts angeordnet sind. Die Gesamtlänge des Fluggeräts wird in Längsrichtung gemessen. Zur einfacheren Beschreibung von Bereichen des Fluggeräts wird nachfolgend dem vordersten Teil des Fluggeräts die relative Längskoordinate 0 zugeordnet, dem hintersten Teil des Fluggeräts die relative Längskoordinate 100 %. In dieser Konvention ist der vordere Bereich dadurch bestimmt, dass er dem (Längs-)Bereich von 0 bis 40 % der Gesamtlänge des Fluggeräts entspricht, der hintere Bereich, dass er dem (Längs-)Bereich von 60 % bis 100 % der Gesamtlänge des Fluggeräts entspricht. Weiter ist es zweckmäßig, wenn die zwei im vorderen Bereich angeordneten Antriebsvorrichtungen auf einer gemeinsamen Geraden, die parallel zur Querrichtung ausgerichtet ist, liegen. Zweckmäßig ist es auch, wenn die zwei im hinteren Bereich angeordneten Antriebsvorrichtungen auf einer gemeinsamen Geraden, die parallel zur Querrichtung ausgerichtet ist, liegen.
- Vorteilhafterweise sind die Antriebsvorrichtungen im vorderen Bereich entlang der ersten Geraden, die parallel zur Querrichtung verläuft, angeordnet, und die Antriebsvorrichtungen im hinteren Bereich entlang der zweiten Geraden, die parallel zur Querrichtung verläuft, angeordnet. Dabei ist der Massenschwerpunkt des Fluggeräts, wenn es den Schwebeflug ausführt, in Längsrichtung in einem Abstand l 1 von der Geraden, entlang der die Antriebsvorrichtungen im vorderen Bereich angeordnet sind, positioniert, wobei


- Rmin ein minimal zulässiges Verhältnis zwischen den Schubvektoren der im vorderen Bereich angeordneten Antriebsvorrichtungen, einerseits, und den Schubvektoren der im hinteren Bereich angeordneten Antriebsvorrichtungen, andererseits,
- Rmax ein maximal zulässiges Verhältnis zwischen den Schubvektoren der im vorderen Bereich angeordneten Antriebsvorrichtungen, einerseits, und den Schubvektoren der im hinteren Bereich angeordneten Antriebsvorrichtungen, andererseits,
- l der Abstand zwischen erster Geraden und zweiter Geraden,
- a 1 eine Kennzahl für die im vorderen Bereich angeordneten Antriebsvorrichtungen, und
- a 2 eine Kennzahl für die im hinteren Bereich angeordneten Antriebsvorrichtungen sind. Zweckmäßigerweise ist das Fluggerät weiter dazu ausgelegt, dass im Schwebeflug die zugeordneten Drehachsen parallel ausgerichtet sind.
- Schließlich soll darauf hingewiesen werden, dass es erfindungsgemäß nicht ausgeschlossen ist, dass das Fluggerät zusätzlich zu den zum erfindungsgemäßen Effekt beitragenden mindestens zwei Antriebsvorrichtungen noch weitere Antriebsvorrichtungen umfasst, die nicht im Wesentlichen in dieselbe Drehrichtung drehen.
- Gemäß einem zweiten Aspekt der Erfindung wird ein Fluggerät bereitgestellt, das einen Fluggeräterumpf, und mindestens drei Antriebsvorrichtungen, die um den Fluggeräterumpf herum gelagert sind, und die um eine jeweils zugeordnete Drehachse drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen, umfasst. Das Fluggerät ist dabei dazu ausgelegt, einen Schwebeflug durchzuführen, bei dem sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, dadurch, dass im Schwebeflug die zugeordneten Drehachsen von zwei der mindestens drei Antriebsvorrichtungen im Wesentlichen in eine erste Richtung ausgerichtet sind, und die zugeordnete Drehachse von einer weiteren der mindestens drei Antriebsvorrichtungen im Wesentlichen in zweite Richtung ausgerichtet ist, wobei die erste Richtung nicht parallel zur zweiten Richtung ist, und jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht.
- Für das erfindungsgemäße Verständnis der Begriffe "im Wesentlichen in eine erste / zweite Richtung ausgerichtet" und "im Wesentlichen in dieselbe Richtung dreht" wird auf den ersten Aspekt der Erfindung verwiesen; die dort angegebenen Definitionen gelten für den zweiten Aspekt entsprechend.
- Die erste Richtung ist nicht parallel zur zweiten Richtung, wenn eine (Bezugs-)Achse, die in die erste Richtung zeigt, nicht parallel zu einer (Bezugs-)Achse ist, die in die zweite Richtung zeigt. Vorzugsweise liegt der Winkel zwischen der ersten und zweiten Richtung in dem Bereich von 30° bis 110°, bevorzugt in dem Bereich 40° bis 100°, besonders bevorzugt in dem Bereich 60° bis 95°.
- Bevorzugt sind die mindestens drei Antriebsvorrichtungen um den Fluggeräterumpf herum im Wesentlichen in einer Ebene gelagert. Zweckmäßig liegt der Fluggeräterumpf in der Ebene, d.h., die Ebene schneidet den Fluggeräterumpf. Weiter ist es vorteilhaft, wenn die erste Richtung und die zweite Richtung in der Ebene liegen.
- Hier bedeutet "im Wesentlichen in einer Ebene gelagert", dass die Antriebsvorrichtungen bzw. deren Lagerungspunkte nicht exakt in gleicher Weise in einer Ebene enthalten sein müssen. So ist es auch noch erfindungsgemäß, wenn eine oder mehrere der Antriebsvorrichtungen aus der Ebene heraus verschwenkt sind, und/oder die Antriebsvorrichtungen bezüglich der Ebene vertikal versetzt sind. Zweckmäßig ist der vertikale Versatz durch die vertikale Ausdehnung des Fluggeräterumpfs beschränkt, d.h., zweckmäßig sind die Antriebsvorrichtungen derart gelagert, dass die Drehachsen der Antriebsvorrichtungen in dem Raumbereich enthalten sind, der zwischen zwei horizontalen Ebenen gebildet wird, die den Fluggeräterumpf berühren und um die vertikale Ausdehnung des Fluggeräterumpfs voneinander beabstandet sind. Die vertikale Ausdehnung ist bezogen auf die Richtung der Schwerkraft, wenn das Fluggerät am (ebenen) Boden ruht.
- Bevorzugt ist jede der im Wesentlichen in die erste Richtung ausgerichteten Drehachsen der zwei der mindestens drei Antriebsvorrichtungen derart ausgerichtet, dass sie im Wesentlichen parallel zu einer Geraden ist, die durch die zwei Antriebsvorrichtungen verläuft. Es ist zweckmäßig, wenn die Gerade durch die geometrischen Zentren (der Begriff wird weiter unten erläutert) oder Lagerungspunkte der Antriebsvorrichtungen gelegt wird.
- Erfindungsgemäß ist eine Drehachse im Wesentlichen parallel zu einer Geraden, wenn der Winkel, der zwischen der Drehachse und der Geraden eingeschlossen ist, geringer als 45°, bevorzugt geringer als 30°, besonders bevorzugt geringer als 15°, ist.
- Besonders bevorzugt umfasst das Fluggerät gemäß dem zweiten Aspekt der Erfindung mindestens vier Antriebsvorrichtungen, die um den Fluggeräterumpf herum gelagert sind, und die um eine jeweils zugeordnete Drehachse drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen. Das Fluggerät ist dabei dazu ausgelegt, den Schwebeflug durchzuführen, dadurch, dass im Schwebeflug die zugeordneten Drehachsen von zwei der mindestens vier Antriebsvorrichtungen im Wesentlichen in die erste Richtung ausgerichtet sind, und die zugeordneten Drehachsen von zwei weiteren der mindestens vier Antriebsvorrichtungen im Wesentlichen in die zweite Richtung ausgerichtet sind, wobei jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht, und/oder jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die zweite Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Richtung um die jeweils zugeordnete Drehachse dreht.
- Die Vorteile, die das Fluggerät gemäß dem zweiten Aspekt der Erfindung gegenüber dem Stand der Technik mit sich bringt, entsprechen grundsätzlich jenen, die bereits im Zusammenhang mit dem Fluggerät des ersten Aspekts der Erfindung beschrieben wurden; um Wiederholungen zu vermeiden, wird daher zunächst auf die dortigen Ausführungen, insbesondere zur Ausnützung des positiven Beitrags des Magnus-Effekts bei in gleicher Richtung drehenden Antriebsvorrichtungen, verwiesen. Im Zusammenhang mit den letztgenannten Beiträgen des Magnus-Effekts ist bei der - im Folgenden auch als "sternförmig" bezeichneten - Anordnung der Antriebsvorrichtungen um den Fluggeräterumpf herum zu berücksichtigen, dass im Vorwärtsflug in der Regel nur ein Teil der Antriebsvorrichtungen von Luft in Flugrichtung angeströmt wird. Damit wirkt sich der Magnus-Effekt im Vorwärtsflug aufgrund der im Wesentlichen gleichen Rotationsdrehung am stärksten bei jenen Antriebsvorrichtungen aus, deren Drehachsen im Wesentlichen senkrecht zur Flugrichtung ausgerichtet sind. Das heißt, bei der Anordnung der Antriebsvorrichtungen gemäß dem zweiten Aspekt der Erfindung ist es ausreichend, wenn das Fluggerät derart konfiguriert ist, dass im Schwebeflug jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht, oder, im Falle von mindestens vier Antriebsvorrichtungen, jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die zweite Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht. In diesem Fall ist es möglich, dass die zwei Antriebsvorrichtungen, die nicht im Wesentlichen in dieselbe Richtung drehen, gegenläufig drehen. Rotieren diese beiden Antriebsvorrichtungen gegengleich, hebt sich das Drehmoment direkt auf. Allerdings ist es besonders vorteilhaft, dass das Fluggerät, wenn es mindestens vier Antriebsvorrichtungen umfasst, derart konfiguriert ist, dass im Schwebeflug jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht, und jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die zweite Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht. Damit kann sichergestellt werden, dass das Fluggerät die positive Wirkung des Magnus-Effekts beim Vorwärtsflug sowohl in der ersten Richtung und zweiten Richtung ausnützen kann. Das Fluggerät ist damit flexibler und stabiler bei Flugrichtungsänderungen.
- Besonders bevorzugt ist das Fluggerät weiter dazu ausgelegt, dass im Schwebeflug der Massenschwerpunkt des Fluggeräts derart positioniert ist, dass dadurch bewirkt wird, dass sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn eine oder mehrere der Antriebsvorrichtungen einen ihnen jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen. Mit dieser Anweisung ist die Einschränkung verbunden, dass der Massenschwerpunkt des Fluggeräts innerhalb eines Bereichs liegen muss, der dadurch bestimmt ist, dass das Fluggerät den Schwebeflug durchführen kann, wenn eine oder mehrere der Antriebsvorrichtungen mit maximaler Schubkraft bzw. maximalem Schubvektor angetrieben werden. Anders ausgedrückt: befindet sich der Massenschwerpunkt innerhalb des besagten Bereichs, sind die Antriebsvorrichtungen in der Lage, entsprechende Schubvektoren zu erzeugen, damit das Fluggerät den Schwebeflug ausführen kann.
- Es ist bevorzugt, wenn jede der im Wesentlichen in die erste Richtung ausgerichteten Drehachsen der zwei der mindestens vier Antriebsvorrichtungen derart ausgerichtet ist, dass sie im Wesentlichen parallel zu einer Geraden verläuft, die durch die zwei Antriebsvorrichtungen verläuft. Bevorzugt ist auch, wenn jede der im Wesentlichen in die zweite Richtung ausgerichteten Drehachsen der zwei weiteren der mindestens vier Antriebsvorrichtungen derart ausgerichtet, dass sie im Wesentlichen parallel zu einer Geraden verläuft, die durch diese zwei weiteren Antriebsvorrichtungen verläuft. Es ist zweckmäßig, wenn die Geraden durch die geometrischen Zentren oder Lagerungspunkte der Antriebsvorrichtungen gelegt werden.
- Wie schon beim ersten Aspekt der Erfindung erfolgt die Kompensation des bzw. der durch die im Wesentlichen in dieselbe Richtung drehenden Antriebsvorrichtungen erzeugten Drehmoments bzw. Drehmomente erfindungsgemäß dadurch, dass der Massenschwerpunkt des Fluggeräts dermaßen positioniert ist, dass unter Berücksichtigung der den Antriebsvorrichtungen jeweils zugeordneten und vorgegeben Schubvektoren im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden. Um eine stabile Fluglage im Schwebeflug sowie im Vorwärtsflug erreichen zu können, muss das Gleichgewicht aller Kräfte und Drehmomente, welche auf das Fluggerät wirken, erfüllt werden. Die Berechnung erfolgt mittels Impuls- und Drallsatz, die schon im Zusammenhang mit dem ersten Aspekt der Erfindung angegeben und beschrieben wurden. Die dortigen Ausführungen gelten hier entsprechend, und dies wird weiter unten noch weiter dargetan.
- Es ist vorteilhaft, wenn drei Antriebsvorrichtungen derart um den Fluggeräterumpf herum angeordnet sind, dass sie die Ecken eines Dreiecks, bevorzugt eines gleichseitigen Dreiecks, bilden. Zweckmäßigerweise befindet sich der Fluggeräterumpf im geometrischen Zentrum des Dreiecks. Die erste Richtung wird durch eine Gerade definiert, auf der zwei der drei Antriebsvorrichtungen liegen; die zweite Richtung steht im Wesentlichen senkrecht auf der ersten Richtung. Darüber hinaus schließt die Drehachse einer jeden der zwei auf der in die erste Richtung zeigenden Geraden liegenden Antriebsvorrichtungen mit der genannten Geraden einen Winkel ein, der im Bereich zwischen 0° und 45°, zweckmäßig zwischen 0° und 30° liegt. Das geometrische Zentrum entspricht der Mittelung aller Punkte innerhalb des Dreiecks (also der Mittelung über die Fläche des Dreiecks mit konstanter Dichte). Wird der Winkel zwischen Drehachse(n) und der in die erste Richtung zeigenden Geraden 30° gewählt, so zeigt/zeigen die Drehachse(n) der Antriebsvorrichtungen zum geometrischen Zentrum hin (bzw. von ihm weg). Der Winkel kann aber auch für jede der Antriebsvorrichtungen unterschiedlich gewählt werden. Es ist zweckmäßig, wenn die Gerade durch die geometrischen Zentren oder Lagerungspunkte der Antriebsvorrichtungen gelegt wird.
- Es ist vorteilhaft, wenn n Antriebsvorrichtungen derart um den Fluggeräterumpf herum angeordnet sind, dass sie die Ecken eines n-Ecks, n> 3, zweckmäßigerweise die Ecken eines regelmäßigen n-Ecks, n> 3, bilden. Zweckmäßig befindet sich der Fluggeräterumpf im geometrischen Zentrum des n-Ecks. Dabei wird die erste Richtung durch eine erste Gerade definiert, auf der zwei der n Antriebsvorrichtungen liegen; die zweite Richtung wird durch eine zweite Gerade definiert, auf der zwei weitere der n Antriebsvorrichtungen liegen. Die Drehachse einer jeden der zwei auf der in die erste Richtung zeigenden ersten Geraden liegenden Antriebsvorrichtungen schließt mit der ersten Geraden einen Winkel ein, der im Bereich zwischen 0° und 45°, zweckmäßig zwischen 0° und 30°, zweckmäßig im Bereich zwischen 0° und 20°, besonders bevorzugt im Bereich zwischen 0° und 18° liegt. Die Drehachsen von unterschiedlichen Antriebsvorrichtungen können dabei unterschiedliche Winkel mit der ersten Geraden einschließen.
- Zweckmäßig ist es auch, wenn die Drehachse einer jeden der zwei auf der in die zweite Richtung zeigenden zweiten Geraden liegenden Antriebsvorrichtungen mit der zweiten Geraden einen Winkel einschließt, der im Bereich zwischen 0° und 45°, zweckmäßig zwischen 0° und 30°, zweckmäßig im Bereich zwischen 0° und 20°, besonders bevorzugt im Bereich zwischen 0° und 18° liegt. Die Drehachsen von unterschiedlichen Antriebsvorrichtungen können dabei unterschiedliche Winkel mit der zweiten Geraden einschließen.
- Werden die Winkel wie vorstehend genannt gewählt, ist es möglich, dass die Drehachsen der Antriebsvorrichtungen in Richtung des geometrischen Zentrums des n-Ecks (bzw. davon weg) zeigen.
- Besonders bevorzugt heißt das, das Fluggerät umfasst 3, 4, 5, 6, 7, 8, ... Antriebsvorrichtungen, die um den Fluggeräterumpf herum derart angeordnet sind, dass sie die Ecken eines gleichseitigen Dreiecks, eines Quadrats, eines regelmäßigen 5-, 6-, 7-Ecks, bzw. regelmäßigen 8-Ecks, usw. bilden. Der Fluggeräterumpf ist zweckmäßig im Wesentlichen im Zentrum des n-Ecks positioniert, wobei hier auf das geometrische Zentrum, nicht jedoch auf das Massenzentrum, des n-Ecks abgestellt wird; denn erfindungsgemäß braucht der Massenschwerpunkt des Fluggeräts nicht notwendig mit dem geometrischen Zentrum (geometrischen Schwerpunkt) zusammenzufallen. Das geometrische Zentrum eines n-Ecks ist entsprechend dem geometrischen Zentrum des Dreiecks definiert.
- Zweckmäßig ist n = 2j, j > 1. Dann ist es weiter zweckmäßig, dass sich der Fluggeräterumpf zwischen jeweils zwei gegenüberliegenden Antriebsvorrichtungen des regelmäßigen 2j-Ecks befindet. In diesem Fall ist es von Vorteil, wenn die zwei bestimmten gegenüberliegenden Antriebsvorrichtungen zugeordneten Drehachsen jeweils im Wesentlichen in die Richtung zeigen, die durch eine Gerade definiert ist, auf der die zwei bestimmten gegenüberliegenden Antriebsvorrichtungen liegen. Weiter ist es vorteilhaft, wenn das Fluggerät dazu ausgelegt ist, den Schwebeflug durchzuführen, indem im Schwebeflug jeweils zwei gegenüberliegende Antriebsvorrichtungen im Wesentlichen in dieselbe Richtung um die ihnen zugeordnete Drehachse drehen. In diesem Fall können dann also jerfindungsgemäße Richtungen definiert werden.
- Vorteilhafterweise liegt der Winkel zwischen der ersten Geraden und der zweiten Geraden im Bereich zwischen 60° und 100°, bevorzugt zwischen 60° und 90°, besonders bevorzugt zwischen 70° und 90°, besonders bevorzugt zwischen 72° und 90°. Wie später noch gezeigt, ist es für ein regelmäßiges (2j + 1)-Eck, j > 1, besonders vorteilhaft, die erste Gerade und die zweite Gerade (bzw. entsprechende Richtungen) so zu wählen, dass der Winkel zwischen der ersten Geraden und zweiten Geraden 90°. (1 - 1/(2j + 1)), beträgt. Für ein (beliebiges) (2j + 1)-Eck ist somit ein besonders bevorzugter Bereich für den Winkel zwischen erster und zweiter Geraden gegeben durch: [90°· (1 - 1/(2j + 1)); 90°]. Liegen die Winkel zwischen den Drehachsen der entlang der ersten Geraden angeordneten Antriebsvorrichtungen und der ersten Geraden im Bereich [0°; 90°/(2j + 1)], und/oder die Winkel zwischen den Drehachsen der entlang der zweiten Geraden angeordneten Antriebsvorrichtungen und der zweiten Geraden im Bereich [0°; 90°/(2j + 1)], so sind Konfigurationen umsetzbar, bei denen die Drehachsen der Antriebsvorrichtungen in Richtung des geometrischen Zentrums des (2j + 1)-Ecks (oder davon weg) zeigen.
- Im Falle eines regelmäßigen 2j-Ecks, j > 1, ist es zweckmäßig, die erste Gerade und die zweite Gerade so zu wählen, dass sie einen Winkel einschließen, der 90° - 90°/(2j) . (2j mod 4) beträgt. Dann verlaufen die erste und die zweite Gerade jeweils durch das geometrische Zentrum des 2j-Ecks. Für ein (beliebiges) 2j-Eck ist somit ein besonders bevorzugter Bereich für den Winkel zwischen erster und zweiter Geraden gegeben durch: [90° - 90°/j; 90°].
- Werden die erste Gerade und zweite Gerade so bestimmt, dass der Winkel zwischen ihnen im Bereich [60°; 90°] beträgt, und liegen die Winkel zwischen den Drehachsen der entlang der ersten Geraden angeordneten Antriebsvorrichtungen und der ersten Geraden im Bereich [0°; 30°], und/oder die Winkel zwischen den Drehachsen der entlang der zweiten Geraden angeordneten Antriebsvorrichtungen und der zweiten Geraden im Bereich [0°; 30°], können die Antriebsvorrichtungen in einem (beliebigen) regelmäßigen n-Eck (n> 2) um den Fluggeräterumpf angeordnet werden, sodass die Drehachsen der Antriebsvorrichtungen in Richtung des geometrischen Zentrums (oder davon weg) ausgerichtet sind. Soll n > 3 betrachtet werden, ist es ausreichend, wenn der Winkel zwischen Drehachse einer Antriebsvorrichtung und der durch sie verlaufenden ersten oder zweiten Geraden im Bereich [0°; 18°] liegt.
- Zweckmäßig steht die zweite Richtung im Wesentlichen senkrecht, besonders bevorzugt: senkrecht, zur ersten Richtung, und es sind zwei der mindestens vier Antriebsvorrichtungen entlang der ersten Richtung angeordnet, und die zwei weiteren der mindestens vier Antriebsvorrichtungen sind entlang der im Wesentlichen senkrecht zur ersten Richtung stehenden zweiten Richtung angeordnet. Dies ist ein Beispiel, bei dem die Antriebsvorrichtungen um den Fluggerätrumpf an den Ecken eines Quadrats angeordnet sein können.
- Bevorzugt ist der Massenschwerpunkt des Fluggeräts, wenn es den Schwebeflug ausführt, in der ersten Richtung in einem Abstand l 34 von einer Geraden, entlang der die Antriebsvorrichtungen in der zweiten Richtung angeordnet sind, positioniert, wobei



- Rmin ein minimal zulässiges Verhältnis zwischen den Schubvektoren der entlang der ersten Richtung angeordneten Antriebsvorrichtungen,
- Rmax ein maximal zulässiges Verhältnis zwischen den Schubvektoren der entlang der ersten Richtung angeordneten Antriebsvorrichtungen,
- a 34 eine Kennzahl für die entlang der zweiten Richtung angeordneten Antriebsvorrichtungen, und
- l der Abstand der geometrischen Zentren der in der ersten Richtung angeordneten Antriebsvorrichtungen sind.
- Bevorzugt ist der Massenschwerpunkt des Fluggeräts, wenn es den Schwebeflug ausführt, in der zweiten Richtung in einem Abstand l 12 von einer Geraden, entlang der die Antriebsvorrichtungen in der ersten Richtung angeordnet sind, positioniert, wobei



-

-

- a 12 eine Kennzahl für die entlang der ersten Richtung angeordneten Antriebsvorrichtungen, und
- l' der Abstand der geometrischen Zentren der in der zweiten Richtung angeordneten Antriebsvorrichtungen sind.
- Sowohl für das Fluggerät gemäß dem ersten Aspekt als auch für jenes gemäß dem zweiten Aspekt kann es vorteilhaft sein, bei annähernd gleichen zugeordneten bestimmten vorgegebenen Schubvektoren den Schwebeflug auszuführen.
- Ebenso kann es in jedem der Fluggeräte des ersten oder zweiten Aspekts vorteilhaft sein, wenn es weiter eine Verlagerungsvorrichtung aufweist, mit der der Massenschwerpunkt des Fluggeräts verlagerbar ist. Zweckmäßig umfasst das Fluggerät dazu ferner einen Treibstofftank zur Versorgung der Antriebsvorrichtungen mit Treibstoff und/oder eine Batterie zur Versorgung der Antriebsvorrichtungen mit elektrischer Energie, wobei die Verlagerungsvorrichtung dazu ausgelegt ist, Treibstoff aus dem Treibstofftank oder die Batterie innerhalb des Fluggeräts zu verlagern, um damit den Massenschwerpunkt so zu positionieren, dass das Fluggerät den Schwebeflug durchführt, wenn eine oder mehrere der Antriebsvorrichtungen den jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen. Der Massenschwerpunkt des Fluggeräts ist daher dynamisch verlagerbar. Der Vorteil ist, dass damit der Massenschwerpunkt des Fluggeräts diversen Fluglagen entsprechend optimal angepasst werden kann. Die Verlagerung des Massenschwerpunkts kann durch eine Fluggerätesteuerung erfolgen.
- Bevorzugt umfassen die Fluggeräte nach dem ersten oder zweiten Aspekt eine Schubvektorsteuerung, um die Schubvektoren der Antriebsvorrichtungen individuell zu steuern.
- Gemäß einem dritten Aspekt der Erfindung wird ein Verfahren zur Herstellung eines Fluggeräts nach dem ersten Aspekt der Erfindung bereitgestellt, umfassend die folgenden Schritte:
- Positionieren des Massenschwerpunkts des Fluggeräts derart, dass eine oder mehrere der Antriebsvorrichtungen einen ihnen jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen, damit das Fluggerät einen Schwebeflug durchführt, bei dem sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn
- jede der zugeordneten Drehachsen im Wesentlichen in Querrichtung des Fluggerätekörpers ausgerichtet ist, und
- jede der mindestens zwei Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht.
- Gemäß einem vierten Aspekt der Erfindung wird ein Verfahren zur Herstellung eines Fluggeräts nach dem zweiten Aspekt der Erfindung bereitgestellt, umfassend die folgenden Schritte:
- Positionieren des Massenschwerpunkts des Fluggeräts derart, dass eine oder mehrere der Antriebsvorrichtungen einen ihnen jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen, damit das Fluggerät einen Schwebeflug durchführt, bei dem sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn
- die zugeordneten Drehachsen von zwei der mindestens drei Antriebsvorrichtungen im Wesentlichen in die erste Richtung ausgerichtet sind, und die zugeordnete Drehachse von einer weiteren der mindestens drei Antriebsvorrichtungen im Wesentlichen in die zweite Richtung ausgerichtet ist, und
- jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht.
- In dem bevorzugten Fall, dass das Fluggerät mindestens vier Antriebsvorrichtungen umfasst, sind die zugeordneten Drehachsen von zwei der mindestens vier Antriebsvorrichtungen im Wesentlichen in die erste Richtung ausgerichtet, und die zugeordneten Drehachsen von zwei weiteren der mindestens vier Antriebsvorrichtungen im Wesentlichen in die zweite Richtung ausgerichtet sind, und jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die erste Richtung ausgerichteten Drehachsen dreht im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse, und/oder jede der zwei Antriebsvorrichtungen mit im Schwebeflug in die zweite Richtung ausgerichteten Drehachsen dreht im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse.
- Gemäß einem fünften Aspekt der Erfindung wird ein Verfahren zur Steuerung eines Fluggeräts mit einem Fluggerätekörper bereitgestellt, der eine Längsrichtung, eine Vertikalrichtung und eine Querrichtung definiert, wobei die Längsrichtung der Richtung vom Heck zur Nase des Fluggeräts entspricht, die Vertikalrichtung mit der Richtung der Erdanziehungskraft übereinstimmt, wenn das Fluggerät am Boden ruht, und die Querrichtung senkrecht auf der Längsrichtung und der Vertikalrichtung steht, und mindestens zwei Antriebsvorrichtungen, die um eine jeweils zugeordnete Drehachse drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen, wobei eine erste Anzahl von Antriebsvorrichtungen entlang einer ersten Geraden, die parallel zur Querrichtung verläuft, angeordnet ist, und eine zweite Anzahl der Antriebsvorrichtungen entlang einer zweiten Geraden, die parallel zur Querrichtung verläuft, angeordnet ist, die erste Gerade von der zweiten Geraden beabstandet ist, und der Massenschwerpunkt des Fluggeräts bezüglich der Längsrichtung zwischen der ersten Geraden und der zweiten Geraden positioniert ist. Das Verfahren umfasst die folgenden Schritte:
- Bestimmen der zugehörigen Schubvektoren derart, dass das Fluggerät einen Schwebeflug durchführt, wenn jede der den mindestens zwei Antriebsvorrichtungen zugeordneten Drehachsen im Wesentlichen in Querrichtung des Fluggerätekörpers ausgerichtet ist, und jede der mindestens zwei Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht,
wobei im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, - Antreiben jeder der Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung derart, dass die jeweilige Antriebsvorrichtungen den bestimmten zugehörigen Schubvektor erzeugt.
- Gemäß einem sechsten Aspekt der Erfindung wird ein Verfahren zur Steuerung eines Fluggeräts mit einem Fluggeräterumpf, und mindestens drei Antriebsvorrichtungen, die um den Fluggeräterumpf herum gelagert sind, und die jeweils um eine zugeordnete Drehachse drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen, bereitgestellt, das die folgenden Schritte umfasst:
- Bestimmen der zugehörigen Schubvektoren derart, dass das Fluggerät einen Schwebeflug durchführt, wenn zwei der den mindestens drei Antriebsvorrichtungen zugeordneten Drehachsen im Wesentlichen in erste Richtung ausgerichtet sind und im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse drehen, und/oder eine weitere der den mindestens drei Antriebsvorrichtungen zugeordneten Drehachsen im Wesentlichen in eine zweite Richtung, die nicht parallel zur ersten Richtung ist, ausgerichtet ist,
wobei im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, - Ausrichten der zugeordneten Drehachsen von zwei der mindestens drei Antriebsvorrichtungen im Wesentlichen in die erste Richtung, und Ausrichten der zugeordneten Drehachse der weiteren der mindestens drei Antriebsvorrichtungen im Wesentlichen in die zweite Richtung,
- Antreiben jeder der Antriebsvorrichtungen derart, dass die jeweilige Antriebsvorrichtungen in eine zugeordnete Drehrichtung dreht und den bestimmten zugehörigen Schubvektor erzeugt,
wobei jede der Antriebsvorrichtungen mit im Wesentlichen in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht. - Bevorzugt ist das Verfahren zur Steuerung eines Fluggeräts mit mindestens vier Antriebsvorrichtungen vorgesehen und umfasst die folgenden Schritte:
- Bestimmen der zugehörigen Schubvektoren derart, dass das Fluggerät einen Schwebeflug durchführt, wenn zwei der den mindestens vier Antriebsvorrichtungen zugeordneten Drehachsen im Wesentlichen in eine erste Richtung ausgerichtet sind und im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse drehen, und/oder zwei weitere der den mindestens vier Antriebsvorrichtungen zugeordnete Drehachse im Wesentlichen in eine zweite Richtung, die nicht parallel zur ersten Richtung ist, ausgerichtet sind und im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse drehen,
wobei im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden,- Ausrichten der zugeordneten Drehachsen von zwei der mindestens vier Antriebsvorrichtungen im Wesentlichen in die erste Richtung, und Ausrichten der zugeordneten Drehachsen der zwei weiteren der mindestens vier Antriebsvorrichtungen im Wesentlichen in die zweite Richtung,
- Antreiben jeder der Antriebsvorrichtungen derart, dass die jeweilige Antriebsvorrichtungen in eine zugeordnete Drehrichtung dreht und den bestimmten zugehörigen Schubvektor erzeugt,
- Bevorzugt werden in den Verfahren zur Steuerung eines Fluggeräts gemäß dem fünften oder sechsten Aspekt sämtliche der bestimmten zugehörigen Schubvektoren annähernd identisch gewählt.
- Vorteilhafterweise umfassen die Verfahren zur Steuerung eines Fluggeräts gemäß dem fünften oder sechsten Aspekt weiter den folgenden Schritt:
- Positionieren des Massenschwerpunkts des Fluggeräts derart, dass dadurch bewirkt wird, dass sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn die Antriebsvorrichtungen die ihnen jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen.
- Die Vorteile der Verfahren gemäß dem dritten bis sechsten Aspekt der Erfindung sind dieselben, die bereits im Zusammenhang mit den erfindungsgemäßen Fluggeräten gemäß dem ersten und zweiten Aspekt beschrieben wurden. Die zweckmäßigen, vorteilhaften und bevorzugten Ausgestaltungen des ersten und zweiten Aspekts finden daher entsprechend Anwendung auf den dritten bis sechsten Aspekt der Erfindung.
- Bevorzugt ist im Fluggerät oder Verfahren gemäß jedem beliebigen der erfindungsgemäßen Aspekte jede der Antriebsvorrichtungen konstruktiv identisch ausgestaltet.
- Besonders bevorzugt umfassen für jedes Fluggerät oder Verfahren nach jedem beliebigen der erfindungsgemäßen Aspekte die Antriebsvorrichtungen Cyclogyro-Rotoren.
- Zweckmäßigerweise umfasst dabei jeder Cyclogyro-Rotor mehrere Rotorblätter, die entlang einer Kreisbahn um die jeweils zugeordnete Drehachse der Antriebsvorrichtung bzw. des Cyclogyro-Rotors drehbar sind; einen Pitch-Mechanismus mit einer Kopplungsvorrichtung und einer Lagerungsvorrichtung, wobei jedes der mehreren Rotorblätter durch die Lagerungsvorrichtung um seine Rotorblatt-Lagerungsachse parallel zur Drehachse der Antriebsvorrichtung bzw. des Cyclogyro-Rotors schwenkbar gelagert ist. Des Weiteren umfasst der Cyclogyro-Rotor zweckmäßigerweise eine Offset-Vorrichtung, an die jedes Rotorblatt durch die Kopplungsvorrichtung in einem ihm zugeordneten Anbindungspunkt angekoppelt ist. Dabei definiert die Offset-Vorrichtung eine exzentrische Lagerungsachse, die in einem einstellbaren Offset-Abstand parallel zur Drehachse der Antriebsvorrichtung bzw. des Cyclogyro-Rotors gelagert ist. Dadurch bewirkt die Rotation der Rotorblätter entlang der Kreisbahn um die Drehachse der Antriebsvorrichtung bzw. des Cyclogyro-Rotors eine Pitch-Bewegung der Rotorblätter, wenn der Offset-Abstand auf einen Wert ungleich Null eingestellt ist.
- Generell ist aber die Anforderung an die Auftriebskraft eines Fluggerätes weitestgehend konstant, und eine Erhöhung wird meist nicht benötigt, da hier im Wesentlichen der Schwerkraft entgegengewirkt werden muss. Mit Hilfe der Offset-Vorrichtung kann aber nun die Schubkraft auf Grund der Erhöhung wiederum reduziert werden, was in einer verringerten Leistungsaufnahme des Rotors resultiert.
- Im Folgenden werden bevorzugte Ausführungsbeispiele der vorliegenden Erfindung anhand der nachfolgenden Figuren beschrieben. Es zeigen:
-
Figur 1 : eine perspektivische Ansicht eines Fluggeräts gemäß dem ersten Aspekt der Erfindung; -
Figur 2a : eine schematische Darstellung einer Antriebsvorrichtung und die darauf wirkenden Kräfte und Drehmomente; -
Figur 2b : eine schematische Darstellung einer Antriebsvorrichtung im Vorwärtsflug des Fluggeräts und die darauf wirkenden Kräfte und Drehmomente unter Berücksichtigung einer Anströmung; -
Figur 3a : eine schematische Darstellung des Fluggeräts gemäß dem ersten Aspekt der Erfindung in Draufsicht; -
Figur 3b : eine schematische Darstellung des Fluggeräts gemäß dem ersten Aspekt der Erfindung und der darauf wirkenden Kräfte und Drehmomente in Seitenansicht; -
Figur 3c : eine Beispielskonfiguration eins Fluggeräts mit vier parallelen und gleich großen Antriebsvorrichtungen zur Veranschaulichung der bevorzugten Massenschwerpunktlage des Fluggeräts; -
Figur 4 : eine schematische Darstellung des Fluggeräts gemäß dem ersten Aspekt der Erfindung in Draufsicht zur Verallgemeinerung der Bedingungen für eine stabile Fluglage; -
Figur 5 : eine perspektivische Ansicht einer erfindungsgemäßen Antriebsvorrichtung; -
Figur 6 : eine perspektivische Ansicht eines Fluggeräts gemäß dem zweiten Aspekt der Erfindung; -
Figur 7a : eine schematische Darstellung des Fluggeräts gemäß dem zweiten Aspekt der Erfindung in Draufsicht und der darauf wirkenden Kräfte und Drehmomente; -
Figur 7b : eine schematische Darstellung des Fluggeräts in einer erfindungsgemäßen Konfiguration gemäß dem zweiten Aspekt der Erfindung und der darauf wirkenden Kräfte und Drehmomente in einer ersten Seitenansicht; -
Figur 7c : eine schematische Darstellung des Fluggeräts in einer erfindungsgemäßen Konfiguration gemäß dem zweiten Aspekt der Erfindung und der darauf wirkenden Kräfte und Drehmomente in einer zweiten Seitenansicht; -
Figur 7d : eine Beispielskonfiguration eins Fluggeräts gemäß dem zweiten Aspekt der Erfindung mit vier sternförmig angeordneten und gleich großen Antriebsvorrichtungen zur Veranschaulichung der bevorzugten Massenschwerpunktlage des Fluggeräts; -
Figur 8a : einen Ausschnitt eines Fluggeräts mit n Antriebsvorrichtungen gemäß dem zweiten Aspekt der Erfindung in Draufsicht zur Erläuterung der Bestimmung des Massenschwerpunkts; -
Figur 8b : einen Ausschnitt des Fluggeräts mit n Antriebsvorrichtungen in Seitenansicht; -
Figur 9a : eine schematische Darstellung eines Fluggeräts gemäß dem zweiten Aspekt der Erfindung mit drei Antriebsvorrichtungen; -
Figur 9b : eine schematische Darstellung eines Fluggeräts gemäß dem zweiten Aspekt der Erfindung mit sieben Antriebsvorrichtungen; -
Figur 9c : eine schematische Darstellung eines Fluggeräts gemäß dem zweiten Aspekt der Erfindung mit sechs Antriebsvorrichtungen. -
Figur 1 zeigt eine perspektivische Ansicht eines Fluggeräts 100 gemäß dem ersten Aspekt der Erfindung mit einem Fluggerätekörper 120 und mehreren Antriebsvorrichtungen 1F, 1 R. Jede der Antriebsvorrichtungen 1 F, 1R kann mit entsprechenden Halterungs- oder Lagerungseinrichtungen am Fluggerätekörper 120 montiert sein. - Bei dem dargestellten Fluggerät 100 kann es sich beispielsweise um ein Luftfahrzeug, ein bemanntes Fluggerät, eine Drohne oder um sog. Micro Air Vehicles (MAVs) handeln.
- Zur weiteren Beschreibung des Fluggeräts wird ein Koordinatensystem eingeführt, das eine Längsrichtung 101 bzw. Längsachse, eine Querrichtung 102 bzw. Querachse und eine Vertikalrichtung 103 bzw. Vertikalachse definiert. Das Koordinatensystem soll fest mit dem Fluggerät 100 verankert sein. Die Bezugsrichtungen 101, 102, 103 bzw. -achsen werden wie folgt definiert: Die Längsrichtung 101 entspricht der Richtung vom Heck 122 zur Nase 121 des Fluggeräts 100. In dem in
Fig. 1 gezeigten Ausführungsbeispiel liegt die Längsrichtung 101 somit in einer horizontalen Ebene (parallel zum Erdboden, wenn das Fluggerät 100 auf dem Erdboden ruht), und erstreckt sich von dem Heck 122 (also dem hinteren Teil) des Fluggeräts 100 bis zum Bug 121, oder auch Nase 121, (also dem vorderen Teil) des Fluggeräts 100. Die Vertikalrichtung 103 bzw. -achse entspricht der Richtung der Erdanziehungskraft, wenn das Fluggerät 100 am (ebenen) Boden ruht. Anders ausgedrückt: die Vertikalrichtung 103 steht senkrecht auf der vorstehend genannten horizontalen Ebene, die die Längsrichtung 101 umfasst. Die Querrichtung 102 bzw. -achse steht senkrecht sowohl auf der Längsrichtung 101 als auch auf der Vertikalrichtung 103. Anders ausgedrückt: die Querrichtung 102 liegt in der vorstehend genannten horizontalen Ebene, die die Längsrichtung 101 umfasst, und steht senkrecht auf der Längsrichtung 101. - Das gezeigte Fluggerät 100 weist vier Antriebsvorrichtungen 1F, 1R auf. Bei den gezeigten Antriebsvorrichtungen 1F, 1R handelt es sich um Cyclogyro-Rotoren. Das in
Fig. 1 gezeigte Fluggerät 100 kann daher auch als Cyclogyro bezeichnet werden. Die Antriebsvorrichtungen werden im Zusammenhang mitFigur 5 näher beschrieben. Jede dieser Antriebsvorrichtungen 1F, 1R ist um eine ihr zugeordnete Drehachse 5 drehbar gelagert. Jede Antriebsvorrichtung 1F, 1R umfasst mehrere Rotorblätter 2, die um ihre Längsachse schwenkbar gelagert sind. Damit kann der Neigungswinkel der Rotorblätter 2 während der Rotation der Antriebsvorrichtung 1F, 1R variiert werden. Durch die Steuerung der Rotationsgeschwindigkeit (im Folgenden auch Drehgeschwindigkeit genannt) der Antriebsvorrichtungen 1F, 1R sowie der Steuerung der Neigungswinkel der Rotorblätter 2 können der Betrag sowie die Richtung der erzeugten Schubkraft bzw. des diese beschreibenden Schubvektors variiert werden. - In
Fig. 1 ist zu sehen, dass die zwei der vier Antriebsvorrichtungen 1F im vorderen (Bug-)Bereich des Fluggeräts 100 angeordnet sind, zwei weitere Antriebsvorrichtungen 1R im hinteren (Heck-)Bereich des Fluggeräts 100. Der vordere und hintere Bereich des Fluggeräts sind wie folgt definiert: Die Gesamtlänge des Fluggeräts wird in Längsrichtung 101 gemessen; dem vordersten Teil des Fluggeräts (also der Nase 121 des Fluggeräts 100) wird die relative Längskoordinate 0 zugeordnet, dem hintersten Teil 122 des Fluggeräts 100 die relative Längskoordinate 100 %. In dieser Konvention ist der vordere Teil bzw. Bereich dadurch bestimmt, dass er dem (Längs-)Bereich von 0 bis 40 % der Gesamtlänge des Fluggeräts entspricht, der hintere Teil bzw. Bereich, dass er dem (Längs-)Bereich von 60 % bis 100 % der Gesamtlänge des Fluggeräts entspricht. - Die beiden Antriebsvorrichtungen 1F im vorderen Bereich liegen auf einer gemeinsamen Geraden, die parallel zur Querrichtung 102 bzw. -achse verläuft; ebenso liegen die beiden Antriebsvorrichtungen 1R im hinteren Bereich auf einer gemeinsamen Geraden, die parallel zur Querrichtung 102 bzw. -achse verläuft. Anzumerken ist, dass es sich bei den genannten Geraden nicht zwingend um eine gemeinsame Drehachse zu handeln braucht, an die die Antriebsvorrichtungen (starr) gekoppelt sind. Jede Antriebsvorrichtung 1F, 1R kann über eine eigene ihr zugeordnete Drehachse 5 rotieren, und es ist auch möglich, dass jede der Antriebsvorrichtungen 1 individuell angesteuert werden kann, insbesondere, um deren Drehgeschwindigkeit separat zu steuern. Des Weiteren ist es erfindungsgemäß nicht erforderlich, dass sämtliche Antriebsvorrichtungen 1F, 1R in derselben horizontalen Ebene liegen. Wie in
Fig. 1 gezeigt, kann es zweckmäßig sein, wenn die beiden Antriebsvorrichtungen 1R im hinteren Bereich des Fluggeräts bezüglich der beiden Antriebsvorrichtungen 1F im vorderen Bereich erhöht angeordnet sind. Dies hat den Vorteil, dass die Antriebsvorrichtungen 1R im hinteren Bereich eine bessere Anströmung erhalten und weniger von den von den Antriebsvorrichtungen 1F im vorderen Bereich verursachten Luftverwirbelungen und Turbulenzen beeinträchtigt werden. - Die den Antriebsvorrichtungen 1F, 1R zugeordneten Drehachsen 5 sind in dem Ausführungsbeispiel von
Fig. 1 parallel zur Querrichtung 102 ausgerichtet. Erfindungsgemäß ist es aber nicht zwingend erforderlich, dass sämtliche Drehachsen 5 parallel zueinander verlaufen. Erfindungsgemäß ist es bereits, wenn jede der zugeordneten Drehachsen 5 im Wesentlichen in Querrichtung 102 des Fluggerätekörpers 120 ausgerichtet ist. Erfindungsgemäß ist eine Drehachse 5 im Wesentlichen in Querrichtung 102 des Fluggerätekörpers 120 ausgerichtet, wenn der Winkel, der zwischen der Drehachse 5, und einer Achse, die in Querrichtung verläuft und die Drehachse 5 schneidet, eingeschlossen ist, geringer als 45°, bevorzugt geringer als 30°, besonders bevorzugt geringer als 15°, ist. Die Bezeichnung "im Wesentlichen in Querrichtung ausgerichtet" schließt es somit nicht aus, dass die Drehachsen 5 auch exakt parallel zueinander sind. - Das erfindungsgemäße Fluggerät 100 ist so ausgelegt, dass es einen Schwebeflug durchführen kann, indem jede der vier gezeigten Antriebsvorrichtungen 1F, 1R in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse 5 dreht. Die konstruktiven Einschränkungen, die sich daraus für das Fluggerät 100 ergeben, werden im Zusammenhang mit den weiteren Figuren, insbesondere
Figuren 3a und 3b , erläutert. - Im verallgemeinerten Fall, dass die Drehachsen 5 im Wesentlichen in Querrichtung 102 des Fluggerätekörpers 120 ausgerichtet sind, wird erfindungsgemäß gefordert, dass jede der Antriebsvorrichtungen 1 im Wesentlichen in dieselbe Drehrichtung um die jeweils ihr zugeordnete Drehachse 5 dreht. Wie einleitend bereits ausführlich dargetan, ist dies erfüllt, wenn das Skalarprodukt vom Vektor der Winkelgeschwindigkeit einer bestimmten Antriebsvorrichtung 1F, 1R und einem fest vorgegebenen, aber beliebigen in Querrichtung 102 zeigenden Vektor für alle Antriebsvorrichtungen 1R, 1F dasselbe Vorzeichen besitzt.
-
Figur 2a veranschaulicht die Kraft 7 und das Drehmoment 8, die auf eine mit einer bestimmten Rotationsgeschwindigkeit um eine Drehachse 5 sich drehende Antriebsvorrichtung 1 wirken. InFig. 2a ist nur die Frontansicht der Antriebsvorrichtung 1 dargestellt, und zwar schematisch. In dem gezeigten Fall wird angenommen, dass durch die Antriebsvorrichtung 1 keine Luft angeströmt wird. Die Antriebsvorrichtung 1 rotiert in dem gezeigten Fall im Uhrzeigersinn. Der Vektor der Winkelgeschwindigkeit, der dieser Rotation entspricht, zeigt somit in die Blattebene hinein (gemäß der Rechte-Hand-Regel). - Der Schubvektor F, 7, der auf die Antriebsvorrichtung 1 wirkt, steht senkrecht zur Drehachse 5 der Antriebsvorrichtung 1. Werden Cyclogyro-Rotoren als Antriebsvorrichtungen 1 verwendet, wird der Schubvektor F, 7 durch die periodische Verstellung der Rotorblätter der Cyclogyro-Rotoren erzeugt. Mit Hilfe einer Offset-Vorrichtung des Cyclogyro-Rotors kann die periodische Rotorblatt-Verstellung verändert und somit kann der Schubvektor in der gesamten Ebene, welche normal zur Drehachse 5 des Cyclogyro-Rotors steht, gedreht und der Betrag des Schubvektors verändert werden. Zweckmäßigerweise wird dazu eine Schubvektorsteuerung eingesetzt.
- Zusätzlich zum Schubvektor F, 7 erzeugt die Antriebsvorrichtung 1 ein Drehmoment M, 8 um die Drehachse 5 entgegen der Drehrichtung 51. Dieses Drehmoment M, 8 um die Drehachse 5 resultiert aus den Luftkräften (Auftriebs- und Widerstandskräfte), bzw. deren tangentialen Komponenten, der Antriebsvorrichtung 1; im Falle eines Cyclogyro-Rotors sind die Luftkräfte primär auf die rotierenden Rotorblätter zurückzuführen. Um eine konstante Drehgeschwindigkeit aufrechtzuerhalten, muss die Antriebsvorrichtung 1 somit ein (Antriebs-)Drehmoment erzeugen, das dem aufgrund der Luftkräfte resultierenden Drehmoment entgegenwirkt. Damit die Antriebsvorrichtung 1 allerdings ein solches (Antriebs-)Drehmoment auch während der Flugphase erzeugen kann, ist ein weiteres Drehmoment M, 8 erforderlich, das der Fluggerätekörper (gemäß dem Prinzip actio = reactio) aufbringen muss, um die Antriebsvorrichtung 1 in der Luft "abzustützen". Dieses letztgenannte Drehmoment M, 8 ist, um eine konstante Rotationsgeschwindigkeit gegen die Luftkräfte aufrechtzuerhalten, (bei Vernachlässigung dissipativer Effekte) betragsmäßig etwa gleich groß wie das durch die Luftkräfte erzeugte Drehmoment, und zeigt auch in dieselbe Richtung wie letzteres. Da das durch die Luftkräfte erzeugte Drehmoment der Drehrichtung 51 der Antriebsvorrichtung 1 entgegenwirkt, wirkt auch das vom Fluggerätekörper aufgebrachte Drehmoment M, 8 der Drehrichtung 51 der Antriebsvorrichtung 1 entgegen. Unter der Annahme, dass das Drehmoment durch die Luftkräfte und jenes der Antriebsvorrichtung im Wesentlichen betragsmäßig gleich, aber entgegengesetzt gerichtet sind, bleibt aufgrund der Rotation der Antriebsvorrichtung 1 als Netto-Drehmoment das vom Fluggerätekörper aufgebrachte Drehmoment M, 8 übrig.
- Dieses Drehmoment M, 8 ist damit gleichbedeutend mit dem Antriebsmoment der Antriebsvorrichtung 1. Das Drehmoment M, 8 kann daher direkt mit der Größe des Schubvektors F, 7 in Relation gebracht werden. Die bereits im Zusammenhang mit
Figur 1 genannten und noch weiter im Hinblick aufFiguren 3a und 3b beschriebenen konstruktiven Einschränkungen des erfindungsgemäßen Fluggeräts können daher unter Verwendung einer mathematisch-physikalischen Relation zwischen dem Drehmoment M, 8 und dem Schubvektors F, 7 angegeben werden. - Mathematisch (und physikalisch) kann der Zusammenhang zwischen der Schubkraft bzw. entsprechendem Schubvektor F, 7 und dem (Antriebs-)Drehmoment M, 8 in Anlehnung an allgemeine Gleichungen eines Propellers erklärt werden. Aufgrund der Lage der Rotorblätter zur Drehachse unterscheidet sich ein klassischer Propeller zwar von einem Cyclogyro Rotor, jedoch basiert die Schuberzeugung bei beiden Konzepten auf der gezielten Verdrängung von Luft in eine Richtung durch Rotorblätter. Die im Folgenden verwendeten Gleichungen werden im Anhang zu dieser Beschreibung der Vollständigkeit halber hergeleitet.
- Zunächst wird die Leistung betrachtet, die erforderlich ist, um die Luft zu verdrängen. Diese Leistung PLuft kann aus der sog. Strahltheorie (s. Anhang) hergeleitet werden, was zu folgendem Ausdruck führt:

- Diese Leistung wird über die Antriebsvorrichtung 1 zur Verfügung gestellt. Zunächst gilt für die Leistung PAntrieb der Antriebsvorrichtung allgemein:

- Der Zusammenhang zwischen den beiden Leistungen PLuft und PAntrieb kann über den Wirkungsgrad η wie folgt beschrieben werden:

- Der Wirkungsgrad η gibt an, wie effektiv die Antriebsleistung PAntrieb in eine Luftströmung umgesetzt wird. Das Verhältnis zwischen der Rotationsgeschwindigkeit ω und Radius r, 52 der Antriebsvorrichtung 1, einerseits, und der totalen Strömungsgeschwindigkeit Va, andererseits, ist eine dimensionslose Kenngröße der Antriebsvorrichtung 1 und wird hier mit H bezeichnet (bei Propellern wird dies üblicherweise "Fortschrittsgrad" genannt):

- Der Zusammenhang zwischen dem (Antriebs-)Drehmoment M, 8 und der Schubkraft bzw. dem Schubvektor F, 7 kann dann ausgehend von Gleichung (3) und Einsetzen der Formeln (1), (2) und (4) hergestellt werden.

- Dieser Zusammenhang ist nur noch von den Kennzahlen H, rund η der Antriebsvorrichtung 1 abhängig. Der Zusammenhang zwischen (den Beträgen von) (Antriebs-)Drehmoment M, 8 und Schubkraft bzw. Schubvektor F, 7 kann daher als eine lineare Funktion mit einem allgemeinen Proportionalitätsfaktor a beschreiben werden:

- Dieser Zusammenhang wird später noch weiter verwendet.
-
Figur 2b zeigt schematisch eine Antriebsvorrichtung 1 im Vorwärtsflug. Die Bewegungsrichtung des Fluggeräts, das die gezeigte Antriebsvorrichtung 1 umfasst, ist mit dem Pfeil 110 angedeutet. Das Drehmoment M, 8, das dem Antriebsmoment der Antriebsvorrichtung 1 entspricht, wurde bereits im Zusammenhang mitFigur 2a beschrieben. Es ist gezeigt, dass die Antriebsvorrichtung 1 von außen mit Luft angeströmt wird 9. Durch die Anströmung 9 der Luft ändern sich die aerodynamischen Eigenschaften an der Antriebsvorrichtung 1 und somit -die Eigenschaften des erzeugten Schubvektors. Befindet sich das Fluggerät und somit die Antriebsvorrichtung 1 im Vorwärtsflug, wird die Antriebsvorrichtung 1 von vorne aktiv mit Luft angeströmt. - Wie einleitend bereits ausgeführt, können die veränderten Eigenschaften an der Antriebsvorrichtung 1 näherungsweise mit dem Magnus-Effekt erklärt werden, der besagt, dass ein rotierender runder Körper in einer Strömung eine Querkraft normal zur Strömungsrichtung erfährt.
- Die Richtung der Querkraft ist abhängig von der Drehrichtung 51 des Körpers, hier, der Antriebsvorrichtung 1. Durch den Magnus-Effekt wird, zusätzlich zu der im Hinblick auf
Figur 2a beschriebenen Schubkraft, deren vertikale Komponente inFigur 2b mit F rotor, 71 bezeichnet ist, eine zusätzliche Schubkraft bzw. ein zusätzlicher Beitrag F magnus, 72 zum Schubvektor in vertikaler Richtung erzeugt. Dadurch wird die gesamte in vertikale Richtung wirkende Schubkraft, die sog. Auftriebskraft, der Antriebsvorrichtung 1 erhöht. Generell ist aber die Anforderung an die Auftriebskraft eines Fluggerätes weitestgehend konstant und eine Erhöhung wird meist nicht benötigt, da hier im Wesentlichen der Erdanziehungskraft entgegengewirkt werden muss. - Aufgrund des merklich im Vorwärtsflug auftretenden Beitrags F magnus, 72 zum Schubvektor kann der durch die Antriebsvorrichtung 1 erzeugte Beitrag F rotor, 71 des Schubvektors reduziert werden. Damit verbunden ist eine verringerte Leistungsaufnahme der Antriebsvorrichtung 1. Vereinfacht beschrieben, ersetzt der Magnus-Effekt einen Teil der Schubkraft der Antriebsvorrichtung 1 und reduziert somit den Leistungsbedarf im Vorwärtsflug gegenüber dem Schwebeflug.
- Würde die Antriebsvorrichtung 1 jedoch in entgegengesetzter Richtung bei gleichbleibender Anströmung 9 drehen, würde die zusätzliche Querkraft F magnus, 72 des Magnus-Effektes entgegen der Schubkraft F rotor, 71 wirken und somit die gesamte Schubkraft verringern oder den Leistungsbedarf bei geforderter gleicher Auftriebskraft erhöhen.
- Bei den erfindungsgemäßen Fluggeräten wird die beschriebene positive Wirkung des Magnus-Effekts ausgenützt, indem im Schwebeflug und im Vorwärtsflug des Fluggeräts sämtliche Antriebsvorrichtungen in dieselbe Drehrichtung um die zugeordneten Drehachsen drehen. Bei verallgemeinerter Anordnung mit im Wesentlichen in Querrichtung des Fluggerätekörpers ausgerichteten Drehachsen drehen die Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung, wie weiter oben näher ausgeführt.
- Drehen die Antriebsvorrichtungen 1 im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse, wird der Beitrag zur Auftriebskraft durch die Querkraft F magnus, 72 um so größer, je schneller das Fluggerät im Vorwärtsflug fliegt. Das heißt, es ist ausreichend, das Fluggerät im Schwebeflug zu konfigurieren, bei dem die Anströmgeschwindigkeit 9 der Luft in der Regel am geringsten ist, um auch eine stabile Fluglage im Vorwärtsflug des Fluggeräts zu realisieren.
- Die Bedingungen für eine stabile Fluglage im Schwebeflug sowie im Vorwärtsflug (Gleichgewicht aller Kräfte und Drehmomente, welche auf das Fluggerät wirken) wurden allgemein bereits einleitend angegeben; nachfolgend werden im Zusammenhang mit
Figuren 3a und 3b aus diesen Bedingungen konstruktive Einschränkungen für das Fluggerät gemäß dem ersten Aspekt der Erfindungen hergeleitet. - In
Figur 3a ist ein Fluggerät 100 gemäß dem ersten Aspekt der Erfindung in stark schematischer Darstellung in Draufsicht gezeigt. Zu sehen sind neben den bereits im Zusammenhang mitFigur 1 beschriebenen Fluggerätekörper 120, den Antriebsvorrichtungen 1F und 1R, den ihnen jeweils zugeordneten Drehachsen 5 und Längsrichtung 101 und Querrichtung 102 auch der Massenschwerpunkt S, 150 des Fluggeräts 100. Die Lage bzw. Positionierung des Massenschwerpunkts S, 150 ist für den Ausgleich der durch die in im Wesentlichen gleiche Drehrichtung rotierenden Antriebsvorrichtungen 1 verursachten gleich gerichteten Drehmomente von zentraler Bedeutung. Dies wird näher im Hinblick aufFigur 3b beschrieben. -
Figur 3b zeigt das inFigur 3a in Draufsicht dargestellte Fluggerät gemäß dem ersten Aspekt der Erfindung in Seitenansicht und in stark schematischer Darstellung. In dieser Seitenansicht sind nur eine der zwei im vorderen Bereich des Fluggeräts angeordneten Antriebsvorrichtungen 1F und eine der zwei im hinteren Bereich des Fluggeräts angeordneten Antriebsvorrichtungen 1R zu sehen. Des Weiteren sind inFig. 3b die vier Antriebsvorrichtungen 1F und 1R in einer horizontalen Ebene angeordnet. Die nachfolgenden Ausführungen gelten aber auch für den Fall, dass nicht alle Antriebsvorrichtungen in einer horizontalen Ebene liegen. Die den Antriebsvorrichtungen 1F und 1R zugeordneten Drehachsen sind parallel zueinander und parallel zur Querrichtung (welche in die Blattebene hineinzeigt). - Erfindungsgemäß drehen alle vier Antriebsvorrichtungen 1F, 1R in die gleiche Drehrichtung 51 mit einer bestimmten zugeordneten Rotationsgeschwindigkeit. In
Fig. 3b rotieren alle Antriebsvorrichtungen 1F und 1R im Uhrzeigersinn, das bedeutet, alle vier Antriebsvorrichtungen sind bezüglich der inFig. 3a angegebenen Querrichtung (y-Achse) rechtsdrehend. Anders ausgedrückt: Das Skalarprodukt eines jeden der den Antriebsvorrichtungen 1F, 1R zugeordneten Vektors der Winkelgeschwindigkeit mit dem Einheitsvektor in Querrichtung ist positiv. Losgelöst vom verwendeten Bezugssystem kann man auch sagen, dass die Antriebsvorrichtungen derart rotieren, dass die Fläche der Antriebsvorrichtungen, die im Vorwärtsflug zuerst auf die angeströmte Luft trifft, entgegen der Richtung der Erdanziehungskraft dreht. Bei Drehung der Antriebsvorrichtungen im Uhrzeigersinn wirkt sich der Magnus-Effekt besonders positiv aus. Dies gilt für eine beliebige Anzahl von Antriebsvorrichtungen. - Wie oben schon ausgeführt, wird durch die Rotation der jeder Antriebsvorrichtung 1F, 1R ein Schubvektor erzeugt. In der Notation gemäß
Fig. 3b wird der von den beiden im vorderen Bereich angeordneten Antriebsvorrichtungen 1F gemeinsam erzeugte Schubvektor mit F 1 701 bezeichnet, der von den beiden im hinteren Bereich angeordneten Antriebsvorrichtungen 1R gemeinsam erzeugte Schubvektor wird mit F 2, 702 bezeichnet. Dadurch, dass alle Antriebsvorrichtungen 1F und 1R in dieselbe Drehrichtung 51 rotieren, wirken alle entstehenden (Antriebs-)Drehmomente M 1, 81 M 2, 82 ebenfalls in die gleiche Richtung, wobei hier M 1, 81 das (Antriebs-)Drehmoment beider vorderen Antriebsvorrichtungen 1F bezeichnet, und M 2, 82 das (Antriebs-)Drehmoment beider hinteren Antriebsvorrichtungen 1R. - Nun werden Impuls- und Drallsatz um den Massenschwerpunkt S, 150 des Fluggeräts aufgestellt, wobei im dargestellten Fall nur der Impulssatz in Vertikalrichtung 103 (z-Achse) und der Drallsatz um die Querrichtung (y-Achse) relevant sind, da nur hier Kräfte bzw. Drehmomente wirken.
- Die Bedingungen für einen stabilen Schwebeflug lauten dann:


- Die Schubvektoren F 1 und F 2 können derart eingestellt werden, um die beiden Gleichgewichtsbedingungen zu erfüllen. Zweckmäßigerweise werden die Schubvektoren durch die Schubvektorsteuerung eingestellt. l 1, 131 und l 2, 132 geben, bezogen auf die Längsrichtung, den Abstand des Schwerpunkts S, 150 von den Antriebsvorrichtungen 1F im vorderen Bereich bzw. 1R im hinteren Bereich an. FS, 160 bezeichnet die Gewichtskraft des gesamten Fluggeräts.
- Es ist aber auch möglich, die beiden Gleichgewichtsbedingungen zu verwenden, um den Massenschwerpunkt des Fluggeräts derart zu bestimmen, dass die besagten Bedingungen für den Schwebeflug bei bestimmten vorgegebenen Schubvektoren F 1 und F 2 erfüllt werden.
- Die in
Fig. 3b gezeigten Drehmomente M 1, 81 und M 2, 82 entsprechen den Antriebsmomenten der zwei Antriebsvorrichtungen 1F bzw. der zwei Antriebsvorrichtungen 1R. Zwischen den Beträgen der Drehmomente M 1, 81 und M 2, 82 und den Beträgen der Schubvektoren F 1, 701 bzw. F 2, 702 der entsprechenden Antriebsvorrichtungen 1F bzw. 1R besteht ein mathematisch-physikalischer Zusammenhang. Dieser wird durch die oben angegebene Gleichung (6) bestimmt. Das heißt, die Beträge der Drehmomente M 1, 81 und M 2, 82 sind proportional zu den erzeugten Beträgen der Schubvektoren F 1, 701 bzw. F 2, 702. Die Drehmomente können somit nicht frei gesteuert werden. - Wie oben im Zusammenhang mit Gleichung (6) ausgeführt, ist der Proportionalitätsfaktor a einer jeden Antriebsvorrichtung im Wesentlichen abhängig von der Effizienz der Antriebsvorrichtung, deren Winkelgeschwindigkeit und weiteren Kennzahlen der Antriebsvorrichtung.
- Jede Antriebsvorrichtung kann einen anderen Proportionalitätsfaktor a aufweisen. Allerdings nehmen die Werte von a von verschiedenen Antriebsvorrichtungen gleicher Bauart bzw. Baugröße typischerweise die gleiche Größenordnung an. Zweckmäßig sind sie im Wesentlichen identisch.
- Gemäß Gleichung (6) können die Beträge M 1, M 2 der Drehmomente M 1, 81 bzw. M 2, 82 geschrieben werden als

- Daraus ergibt sich die Drehmomentengleichung (8) zu

- Diese Gleichung kann nun in ein Verhältnis der Beträge F 1 und F 2 der beiden Schubvektoren F 1, 701 bzw. F 2, 702 umgeformt werden:

- Gleichung (9) kann als Konfigurationsformel für das Fluggerät dienen. Die Gleichung (9) enthält zunächst drei frei wählbare Größen (aus der Menge von F 1, F 2, l 1, l 2), allerdings ist in einer stabilen Fluglage noch Gleichung (7) zu beachten, weshalb nur zwei der vorstehend genannten vier Größen frei gewählt werden können.
- Es gibt daher mehrere Möglichkeiten, die Gleichungen (7) und (9) zu erfüllen.
- (i) In einer ersten Fallgestaltung kann gefordert werden, dass das Fluggerät symmetrisch ausgelegt ist. Das heißt, die vorderen Drehachsen 5, also die Drehachsen der im vorderen Bereich des Fluggeräts angeordneten Antriebsvorrichtungen 1F, und die hinteren Drehachsen 5, also die Drehachsen der im hinteren Bereich des Fluggeräts angeordneten Antriebsvorrichtungen 1R, sind vom Massenschwerpunkt S, 150 gleich weit entfernt. Anders ausgedrückt, der Massenschwerpunkt S, 150 befindet sich bezüglich der Längsrichtung in der Mitte zwischen den vorderen und hinteren Drehachsen 5. In diesem Fall ist l 1 = l 2. Dann ergibt sich aus Gleichung (9) und wegen

- Bei dieser Fallgestaltung wird der Massenschwerpunkt S, 150 daher tendenziell nach vorne wandern, was zur Folge hat, dass l 1 < l 2 wird, und die erforderlichen Schubvektoren F 1 und F 2 der Antriebsvorrichtungen 1F bzw. 1R weiter ansteigen.
- (ii) In einer zweiten Fallgestaltung sind Besonders bevorzugt die Antriebsvorrichtungen 1F und 1R konstruktiv identisch ausgestaltet. Das heißt, sie sind baugleich und besitzen beispielsweise die gleiche Größe, die gleiche Spannweite, die gleiche Anzahl von Rotorblättern, den gleichen Durchmesser und/oder erzeugen ähnliche oder gleiche (maximale) Schubkräfte / Schubvektoren. In diesem Fall ist also F 1 = F 2 oder F 1 ≈ F 2. Mit F 1 = F 2 ≡ F folgt aus Gleichung (7) zunächst F= FS /2. Aus Gleichung (9) ergibt sich dann

- Wenn der Abstand in Längsrichtung zwischen der vorderen Antriebsvorrichtungen 1F und hinteren Antriebsvorrichtungen 1R l = l 1 + l 2 beträgt, dann ergibt sich aus der letzten Gleichung:


- Man erkannt, dass der Massenschwerpunkt S, 150 des Fluggeräts in Längsrichtung von der Mitte l/2 zwischen den vorderen Drehachsen 5 der vorderen Antriebsvorrichtungen 1F und den hinteren Drehachsen 5 der hinteren Antriebsvorrichtungen 1R in Richtung der hinteren Drehachsen 5 der hinteren Antriebsvorrichtungen 1R verschoben ist, und zwar um (a 1 + a 2)/2. Typischerweise gilt in diesem Fall a 1 = a 2 ≡ a.
- Wird nun ein Fluggerät mit konstruktiv identischen, gleich großen Antriebsvorrichtungen 1F und 1R und somit annähernd gleich großen Schubkräften / Schubvektoren F 1, 701 bzw. F 2, 702 pro Paar von Antriebsvorrichtungen 1F bzw. 1R konfiguriert, kann der Massenschwerpunkt S, 150 also optimalerweise so positioniert werden, dass die von den Antriebsvorrichtungen erzeugten Drehmomente M 1, 81 bzw. M 2, 82 rein durch die Lage des Massenschwerpunktes S, 150 ausgeglichen werden. Die besagte optimale Position ist durch Gleichungen (10) und (11) bestimmt.
- Hier und im Folgenden muss beachtet werden, dass für die Betrachtungen lediglich die Position der Antriebsvorrichtungen und des Massenschwerpunktes in Längsrichtung 101 eine Rolle spielt. Die Lagerung bzw. Positionierung von Antriebsvorrichtungen und Massenschwerpunkt bezüglich der Querrichtung und Vertikalrichtung 103 ist hier nicht relevant und liegt im Ermessen des Fachmanns. Eine möglichst symmetrische Lagerung bzw. Positionierung in den zwei letztgenannten Richtungen ist jedoch vorzugswürdig.
- (iii) Erfindungsgemäß ist es auch möglich, dass Aspekte der ersten Fallgestaltung (i) und der zweiten Fallgestaltung (ii) miteinander kombiniert werden. Das bedeutet, der Massenschwerpunkt S, 150 des Fluggeräts kann aus der Mitte zwischen den vorderen und hinteren Drehachsen der Antriebsvorrichtungen 1F bzw. 1R derart verschoben werden, dass die Bedingungen (7) und (8) für einen stabilen Schwebeflug bei bestimmten vorgegebenen, auch unterschiedlichen, Schubvektoren / Schubkräften von einzelnen der Antriebsvorrichtungen erfüllt sind.
- Für praktische Anwendungen ist es nicht immer möglich, die Massen in einem Fluggerät so zu platzieren, dass der Gesamtmassenschwerpunkt S, 150 exakt an der in den Fallgestaltungen (i), (ii) oder (iii) beschriebenen vorgegebenen optimalen Position positioniert werden kann; so ist etwa für die Fallgestaltung (i) l 1 = l 2; für die Fallgestaltung (ii) sind l 1 und l 2 gegeben durch Gleichungen (10) und (11). Daher wird nachfolgend ein Bereich definiert, in welchem der Massenschwerpunkt S, 150 liegen kann, sodass es noch möglich ist, den Drehmomentenausgleich mit den Schubkräften / Schubvektoren F 1, 701 bzw. F 2, 702 der Paare von Antriebsvorrichtungen 1F bzw. 1R zu unterstützen. Dazu wird angenommen, dass ein Paar /von Antriebsvorrichtungen eine maximal zulässige (i.d.R. vorgegebene) Schubkraft / einen maximal zulässigen Schubvektor von Fi,max erzeugen kann. Dabei wird angenommen, dass Fi,max größer oder gleich den der optimalen Konfiguration entsprechenden Schubkräften Fi,opt sind. Dies liegt daran, dass ein Fluggerät mindestens die Schubkräfte Fi,opt benötigt, um in einem stabilen Schwebeflug zu verharren; im bevorzugten Fall bringt jedes Paar von Antriebsvorrichtungen noch einen Schubüberschuss auf, der unter anderem für die Abweichung der Lage des Schwerpunkts S, 150 von der optimalen Lage genutzt werden kann. Fi,max ist die maximal von der Schubvektorsteuerung zulässige Schubkraft einer Antriebsvorrichtung, die somit, immer größer oder gleich der Schubkraft für die optimale Auslegung Fi,opt sein muss.
- Unter Berücksichtigung des Impulssatzes gemäß Gleichung (7) ergibt sich:

- Damit lässt sich ein maximal zulässiges Schubvektorverhältnis definieren:
- Und entsprechend:

- Diese Schubvektorverhältnisse F 1/F 2 werden auch durch Gleichung (9) beschrieben; unter Verwendung der letzteren lassen sich der maximal zulässige Abstand in Längsrichtung des Massenschwerpunkts S, 150 von den vorderen Drehachsen 5 zu


- Liegt der Massenschwerpunkt S, 150 außerhalb des Bereiches

-
Figur 3c dient der Veranschaulichung des vorstehend beschriebenen Bereichs, in dem sich der Massenschwerpunkt S, 150 des Fluggeräts zweckmäßigerweise zur Umsetzung der Erfindung gemäß dem ersten Aspekt befinden kann.Fig. 3c zeigt schematisch ein Fluggerät mit Antriebsvorrichtungen 1F, 1R, die entlang von zwei Geraden, die jeweils parallel zur Querrichtung des Fluggeräts verlaufen, angeordnet sind. Zweckmäßig umfasst das Fluggerät vier Antriebsvorrichtungen 1F, 1R, von denen zwei 1F im vorderen Bereich und zwei 1R im hinteren Bereich angeordnet sind, wie schon im Zusammenhang mitFiguren 3a und 3b beschrieben. Es wird weiter angenommen, dass die Antriebsvorrichtungen 1F, 1R konstruktiv identisch ausgestaltet sind (wie in Fallgestaltung (ii)), hier insbesondere: a 1 = a 2 ≡ a. - Zuerst wird weiter angenommen, dass der Drehmomentenausgleich rein über die Lage des Massenschwerpunktes S, 150 realisiert werden soll, wodurch



- der Abstand der Antriebsvorrichtungen in Längsrichtung wird als

- Auf Basis dieser Vorgaben ergibt sich aus Gleichungen (10) und (11) eine optimale Massenschwerpunktlage von

- Ist es nicht möglich, den Gesamtmassenschwerpunkt S, 150 des Fluggerätes auf die Position l 1,opt = 1,2 m zu legen, wird nun ein Bereich definiert, in welchem sich die Lage des Massenschwerpunktes S, 150 befinden kann, sodass der Drehmomentenausgleich von den Schubkräften / Schubvektoren der Antriebsvorrichtungen 1F, 1R kompensiert werden kann. Dazu wird die maximal zulässige Schubkraft, die von sämtlichen entlang einer Geraden angeordneten Antriebsvorrichtungen erzeugt werden kann, die zweckmäßig von der Schubvektorsteuerung gesteuert wird, als




-
Figur 4 zeigt eine weitere Ausgestaltung eines Fluggeräts 100 gemäß dem ersten Aspekt der Erfindung. DieseFig. 4 dient vornehmlich zur Verallgemeinerung der im Zusammenhang mit denFiguren 3a, 3b und3c hergeleiteten Ergebnisse für eine beliebige Anzahl K > 2 von Antriebsvorrichtungen 1. Es wurde oben schon darauf hingewiesen, dass es für die erfindungsgemäßen Betrachtungen primär auf die Positionierung der Antriebsvorrichtungen 1 in Längsrichtung ankommt. Die Antriebsvorrichtungen können so etwa in Vertikalrichtung auf unterschiedlichen Höhen positioniert sein. Die Längsrichtung ist inFig. 4 als x-Achse 101 ausgezeichnet. Es wird angenommen, dass die K Antriebsvorrichtungen des Fluggeräts entlang N> 1 Geraden gi angeordnet sind. Wie schon weiter oben ausgeführt, handelt es sich bei den besagten Geraden um keine konstruktiven Komponenten des Fluggeräts 100, sondern dienen lediglich dazu, die geometrische Anordnung der Antriebsvorrichtungen 1 zu verdeutlichen. Auf einer bestimmten Geraden gi (gekennzeichnet durch Index i, i = 1, ...,N) sollen ni , i = 1, ...,N, Antriebsvorrichtungen 1 angeordnet sein. Damit gilt
- Darüber hinaus wird angenommen, dass sämtliche ni auf einer Geraden gi mit Index i angeordneten Antriebsvorrichtungen 1 eine gesamte Schubkraft / einen gesamten Schubvektor mit Betrag


- Es wird darauf hingewiesen, dass, obwohl die Geraden gi , entlang denen die Antriebsvorrichtungen 1 angeordnet sind, parallel zur Querrichtung 102 ausgerichtet sind, ist es erfindungsgemäß nicht zwingend erforderlich, dass sämtliche Drehachsen 5 der Antriebsvorrichtungen 1 (mathematisch exakt) parallel zueinander oder zur Querrichtung 102 ausgerichtet sind. Es reicht aus, wenn die Drehachsen 5 der Antriebsvorrichtungen 1, speziell im Schwebeflug, im Wesentlichen in Querrichtung 102 ausgerichtet sind, und zwar in dem einleitend definierten Sinne. In
Fig. 4 ist gezeigt, dass die Drehachsen 5 einiger Antriebsvorrichtungen 1 nicht exakt parallel zur Querrichtung 102 ausgerichtet sind. Die Antriebsvorrichtungen 1 sind erfindungsgemäß dennoch auf einer Geraden gi , die parallel zur Querrichtung 102 verläuft, weil deren geometrisches Zentrum im Wesentlichen auf einer solchen Geraden gi , liegen; möglich ist auch, um die Bedingung der Anordnung auf einer parallelen Geraden zu erfüllen, dass die Lagerungspunkte der Antriebsvorrichtungen 1 im Wesentlichen auf einer solchen Geraden gi , liegen. - Jede der Geraden gi mit Index i befinde sich in Längsrichtung 101 (x-Achse) an einer Stelle mit Koordinate xi , i = 1, ... , N, wobei ohne Beschränkung der Allgemeinheit xi - x i - 1 > 0 angenommen wird. Die Längspositionen xi der Geraden gi seien fest aber beliebig.
- Der Massenschwerpunkt S, 150 des Fluggeräts 100 befinde sich bezüglich der Längsrichtung 101 bei der Koordinate XS . Es wird darauf hingewiesen, dass, während im Zusammenhang mit
Figuren 3a, 3b ,3c die Abstände l 1 und l 2 der Geraden vom Massenschwerpunkt betrachtet wurden, hier die Koordinaten bez. der Längsrichtung 101 der Geraden gi verwendet werden; dies erweist sich hier als zweckmäßiger. Gleichwohl kann der Zusammenhang zwischen Koordinaten der Geraden gi und deren Abständen li vom Massenschwerpunkt S, 150 einfach hergestellt werden:
- Mit den eingeführten Notationen lassen sich die Bedingungen für einen stabilen Schwebe- bzw. Vorwärtsflug aus Gleichungen (7) und (8) wie folgt verallgemeinern:


- Unter Einsetzung von Gleichung (13) folgt aus Gleichung (14):


- Ein Zwischenergebnis soll hier festgehalten werden: Aus Gleichung (15) lässt sich die Koordinate XS des Massenschwerpunkts S, 150 berechnen, wenn die Schubvektoren Fi vorgegeben werden; allerdings liefert Gleichung (13) noch eine weitere Bedingung, die für eine stabile Fluglage erfüllt sein muss. Deshalb können nicht alle N Schubvektoren Fi beliebig vorgegeben werden, sondern nur N - 1. Das heißt, die Position XS des Massenschwerpunkts S, 150 für eine stabile Fluglage, speziell den Schwebeflug, ist bestimmt, wenn N - 1 Schubvektoren vorgegebenen werden. Die Werte der vorgegebenen Schubvektoren können natürlich auch gleich sein.
- Der Abstand bezüglich der Längsrichtung des Massenschwerpunkts S, 150 von der vordersten Geraden g 1 bzw. der Antriebsvorrichtung, die bezogen auf die Längsrichtung dem Bug 121 bzw. der Nase 121 des Fluggeräts 100 am nächsten ist, ist:

- Wir betrachten nun zunächst den Fall, bei dem die auf einer Geraden gi angeordneten Antriebsvorrichtungen 1 für jede Gerade annähernd gleich große Schubkräften / Schubvektoren Fi erzeugen, also F 1 ≈ F 2 ≈ ··· ≈ F N-1 ≈ FN ≡ F. Der Massenschwerpunkt S, 150 wird also optimalerweise so positioniert werden, dass die von den Antriebsvorrichtungen 1 erzeugten Drehmomente Mi rein durch die Lage des Massenschwerpunktes S, 150 ausgeglichen werden. Die besagte optimale Position ist durch Gleichungen (13) und (15) bestimmt. Aus Gleichung (13) folgt

- Und damit aus Gleichung (15):

- In diesem Fall kann zweckmäßigerweise ai ≡ a, i = 1,...,N angenommen werden.
- Ein maximal zulässiger Bereich für die (Längs-, x-)Koordinate XS des Massenschwerpunkts S, 150 kann analog zu den Überlegungen zu
Figur 3b auch für den vorstehend beschriebenen allgemeinen Fall ermittelt werden, und zwar unter Verwendung der Gleichungen (13), (14) und (15). -
Figur 5 zeigt eine Ausgestaltung der Antriebsvorrichtungen, die in einem erfindungsgemäßen Fluggerät eingesetzt werden können. Jede dieser Antriebsvorrichtungen 1 ist um eine Drehachse drehbar gelagert. Jede Antriebsvorrichtung 1 umfasst mehrere Rotorblätter 2, die um ihre Längsachse schwenkbar gelagert sind. Damit kann der Neigungswinkel der Rotorblätter 2 während der Rotation der Antriebsvorrichtung 1 variiert werden. Durch die Steuerung der Rotationsgeschwindigkeit der Antriebsvorrichtungen 1 sowie der Steuerung der Neigungswinkel der Rotorblätter 2 können der Betrag sowie die Richtung des erzeugten Schubvektors variiert werden. - In
Figur 5 ist eine erfindungsgemäße Ausgestaltung einer Antriebsvorrichtung 1 perspektivisch dargestellt. Die Antriebsvorrichtung 1 ist zylinderförmig ausgestaltet. Bei der gezeigten Antriebsvorrichtung 1 handelt es sich um einen Cyclogyro-Rotor. Diese Antriebsvorrichtung 1 umfasst fünf Rotorblätter 2, jeweils einen zugehörigen Pitch-Mechanismus 3, eine Offset-Vorrichtung 4 und eine Scheibe 11. Antriebsvorrichtungen mit einer anderen Anzahl von Rotorblättern sind auch möglich. Die Rotorblätter 2 sind drehbar um eine Drehachse der Antriebsvorrichtung 1 gelagert. Die Offset-Vorrichtung 4 definiert eine exzentrische Lagerungsachse, die exzentrisch bezüglich der Drehachse der Antriebsvorrichtung 1 gelagert ist. InFig. 5 ist die Offset-Vorrichtung als Offset-Scheibe (englisch "offset disk") dargestellt. Die Offset-Scheibe ist frei drehbar um die exzentrische Lagerungsachse gelagert. Die exzentrische Lagerung der Offset-Scheibe 4 impliziert eine exzentrische Lagerung des Pitch-Mechanismus 3. Durch die exzentrische Lagerung des Pitch-Mechanismus 3 wird eine Veränderung der Stellung der Rotorblätter 2 während einer Umdrehung um die Drehachse der Antriebsvorrichtung 1 bewirkt. Jeder der dargestellten Pitch-Mechanismen 3 umfasst eine Kopplungsvorrichtung 31 und eine Lagerungsvorrichtung 33. Jedes Rotorblatt 2 ist durch die entsprechende Lagerungsvorrichtung 33 schwenkbar gelagert. Das Rotorblatt 2 ist um eine Achse parallel zur Drehachse der Antriebsvorrichtung 1 gelagert. Diese Achse ist die Rotorblatt-Lagerungsachse 33. Die Lagerung des Rotorblatts 2 kann beispielsweise mithilfe eines Lagerungsmittels, wie einem oder mehreren Stiften, sog. Hauptstift (englisch "main pin") erfolgen. Das Lagerungsmittel ist bevorzugt ein Teil der Lagerungsvorrichtung 33. Die Rotorblatt-Lagerungsachse 33 kann durch den Massenschwerpunkt des Rotorblatts 2 verlaufen. Bevorzugt erfolgt jedoch eine Lagerung des Rotorblatts 2 in einem Abstand vom Massenschwerpunkt. Die Kopplungsvorrichtung 31 des Pitch-Mechanismus 3 koppelt das Rotorblatt 2 derart an die Offset-Vorrichtung 4, dass das Rotorblatt 2 eine Pitch-Bewegung ausführt, wenn er sich um die Drehachse der Antriebsvorrichtung 1 dreht, und unter der Voraussetzung, dass die exzentrische Lagerungsachse nicht mit der Drehachse der Antriebsvorrichtung 1 übereinfällt. Ein Endstück der Kopplungsvorrichtung 31 ist in einem Anbindungspunkt an die Offset-Vorrichtung 4 gekoppelt. Das andere Endstück der Kopplungsvorrichtung 31 ist an das Rotorblatt 2 gekoppelt. - Die Offset-Scheibe 4 ist frei drehbar gelagert. Die Drehachse der Offset-Scheibe 4 verläuft vorzugsweise in einem bestimmten Offset-Abstand parallel zur Drehachse der Antriebsvorrichtung 1. Dadurch kommt die exzentrische Lagerung der Offset-Scheibe 4 bez. der Drehachse der Antriebsvorrichtung 1 zustande. Dieser Offset-Abstand kann einstellbar sein. Eine Offset-Vorrichtung 4 mit einstellbarer Exzentrizität kann beispielsweise durch ein Planentengetriebe realisiert werden. Eine Pitch-Bewegung der Rotorblätter 2 ergibt sich dann, wenn der Offset-Abstand nicht Null beträgt.
- Die Ankopplung der Kopplungsvorrichtung 31 an das Rotorblatt 2 erfolgt in einem Ankopplungspunkt 32. Dazu kann die Kopplungsvorrichtung 31 ein Kopplungsmittel umfassen. Bei der in
Fig. 5 gezeigten Antriebsvorrichtung 1 umfasst die Kopplungsvorrichtung 31 ein Pleuel (englisch "conrod") sowie einen Stift, sog. Pitch-link-Stift. Bei dem Stift handelt es sich um eine konstruktive Ausgestaltung des erfindungsgemäßen Kopplungsmittels. In dem inFig. 5 gezeigten Ausführungsbeispiel erfolgt die Ankopplung der Kopplungsvorrichtung 31 an das Rotorblatt 2 im Ankopplungspunkt 32 nicht durch direkte Verbindung mit dem Rotorblatt 2, sondern indem ein Verbindungselement 61 verwendet wird. Ein Ende des Verbindungselements 61 ist dabei starr mit dem Rotorblatt 2 verbunden. Diese Anbindung erfolgt bevorzugt im Rotorblatt-Lagerungspunkt. Das andere Ende des Verbindungselements 61 ist an die Kopplungsvorrichtung / Pleuel 31 gekoppelt. In diesem Fall wird die Pitch-Bewegung über das Kopplungsmittel mit Hilfe des Pleuels 31 indirekt über das Verbindungselement 61 in das Rotorblatt 2 eingeleitet. - Eine direkte Ankopplung der Kopplungsvorrichtung 31 an das Rotorblatt 2 ist erfindungsgemäß jedoch auch möglich.
- Dadurch, dass die Kopplungsvorrichtung 31 des Pitch-Mechanismus exzentrisch bezüglich der Drehachse der Antriebsvorrichtung 1 gelagert ist, bewegt sich der Ankopplungspunkt 32 relativ zur Rotorblatt-Lagerungsachse 33 auf einem Kreisbogen, wenn das Rotorblatt 2 um die Drehachse der Antriebsvorrichtung 1 rotiert. Dadurch kommt die Pitch-Bewegung des Rotorblatts 2 zustande. Dabei handelt es sich also um eine Pendelbewegung des Rotorblatts 2 um die Rotorblatt-Lagerungsachse 33.
- Der Durchmesser der Antriebsvorrichtung 1 entspricht dem doppelten Abstand von Drehachse der Antriebsvorrichtung 1 zu Rotorblatt-Lagerungsachse 33 bzw. -punkt. Dieser Durchmesser ist relevant für die Flügelgeschwindigkeit bei der Rotation und daher relevant für den erzeugten Schub. In beispielhaften erfindungsgemäßen Ausgestaltungen der Antriebsvorrichtung 1 liegt der Durchmesser im Bereich zwischen 150 mm und 2000 mm, bevorzugt zwischen 300 mm und 500 mm, besonders bevorzugt beträgt er 350 mm.
- Des Weiteren umfasst die in
Fig. 5 gezeigte Antriebsvorrichtung 1 eine Scheibe 11. Diese Scheibe 11 ist derart ausgestaltet, dass sie die Rotorblätter 2 aerodynamisch von den restlichen Komponenten der Antriebsvorrichtung 1 trennt. Eine solche Scheibe 11 ist besonders vorteilhaft für den Fall, dass die Antriebsvorrichtung 1 mit höheren Drehzahlen betrieben wird. - Durch die Länge der Rotorblätter 2 wird die Spannweite der Antriebsvorrichtung 1 definiert. Die Spannweite der Antriebsvorrichtung 1 ist der (longitudinale) Abstand zwischen den beiden Scheiben 11.
- Die Spannweite eines der Cyclogyro-Rotoren, die erfindungsgemäß eingesetzt werden können, beträgt zweckmäßig wenige Zentimeter bis zwei Meter, vorzugsweise liegt sie zwischen 350 bis 420 mm. In den erfindungsgemäßen Fluggeräten kommen vorteilhafterweise mehrere Cyclogyro-Rotoren zum Einsatz. Deren Spannweiten weichen bevorzugt um maximal 25%, zweckmäßigerweise um maximal 10% voneinander ab. Deren Durchmesser weichen bevorzugt um maximal 25%, zweckmäßigerweise um maximal 10% voneinander ab.
- Die in
Fig. 5 gezeigten Rotorblätter 2 weisen ein symmetrisches Profil auf; die Erfindung ist nicht auf Antriebsvorrichtungen mit Rotorblättern mit symmetrischem Profil beschränkt. - Die Antriebsvorrichtung 1 erzeugt Schub bzw. einen Schubvektor aufgrund zweier miteinander gekoppelter Drehbewegungen. Die erste Drehbewegung ist die Rotation der Rotorblätter 2 um die Drehachse der Antriebsvorrichtung 1. Diese erste Drehbewegung führt zu einer Bewegung der Rotorblätter 2 entlang einer Kreisbahn um die Drehachse der Antriebsvorrichtung. Speziell bewegen sich die Rotorblatt-Lagerungsachsen 33 bzw. Rotorblatt-Lagerungspunkte entlang der Kreisbahn. Jede Rotorblatt-Lagerungsachse 33 ist parallel zur Längsachse der Rotorblätter 2. Die Längsachse der Rotorblätter 2 ist parallel zur Drehachse der Antriebsvorrichtung 1. Damit ist die Längsachse der Rotorblätter 2 auch parallel zur Rotorblatt-Lagerungsachse 33. Die Schubrichtung der Antriebsvorrichtung 1 liegt normal zur Drehachse der Antriebsvorrichtung 1. Für eine optimale Schuberzeugung sollen alle Rotorblätter 2 zu jedem Zeitpunkt bestmöglich zur Strömungsrichtung ausgerichtet sein. Damit wird sichergestellt, dass jedes Rotorblatt 2 einen maximalen Beitrag zum gesamten Schub leistet. Während der Drehung der Antriebsvorrichtung 1 um ihre Drehachse wird aufgrund des vorstehend beschriebenen Pitch-Mechanismus die Neigung jedes Rotorblatts 2 laufend geändert. Jedes Rotorblatt 2 vollzieht eine periodische Änderung des Neigungswinkels bzw. eine Pendelbewegung. Dies ist die Pitch-Bewegung. Dabei bewegt sich der Ankopplungspunkt 32 auf einem Kreisbogen um die Rotorblatt-Lagerungsachse 33. Dies ist die zweite Drehbewegung.
- Der Betrag und die Richtung der erzeugten Schubkraft bzw. des zugehörigen Schubvektors hängen von der Neigung der Rotorblätter 2 ab. Daher beeinflusst der Abstand der exzentrischen Lagerung der Offset-Vorrichtung 4 bzw. des Pitch-Mechanismus 3 zur Drehachse der Antriebsvorrichtung 1 den Betrag der erzeugten Schubkraft / des erzeugten Schubvektors. Durch die Verschiebung der exzentrischen Lagerung der Offset-Vorrichtung 4 in Umfangsrichtung, also bei konstantem Abstand zur Drehachse der Antriebsvorrichtung 1, wird die Richtung des erzeugten Schubvektors geändert.
- Obwohl in
Fig. 5 Pitch-Mechanismen 3 nur auf einer Seite der Antriebsvorrichtung 1 gezeigt sind, kann es aus Stabilitätsgründen zweckmäßig sein, auch auf der gegenüberliegenden Seite der Antriebsvorrichtung entsprechende Pitch-Mechanismen anzubringen. Der Pitch-Mechanismus kann beispielsweise auch in der Mitte der Antriebsvorrichtung angebracht werden. -
Figur 6 zeigt eine perspektivische Ansicht eines Fluggeräts 200 gemäß dem zweiten Aspekt der Erfindung mit einem Fluggeräterumpf 220 und mehreren Antriebsvorrichtungen 1A und 1B. Zu sehen sind vier Antriebsvorrichtungen 1A und 1B, die um den Fluggeräterumpf 220 herum angeordnet sind. Jede Antriebsvorrichtung 1A und 1B ist über einen Arm 221 bzw. 222 mit dem Fluggeräterumpf 220 verbunden. Jede der Antriebsvorrichtungen 1A und 1B kann mit entsprechenden Halterungs- oder Lagerungseinrichtungen an den Armen 221 bzw. 222 montiert sein. Das Vorhandensein von Armen 221 bzw. 222 ist nicht wesentlich. Die Antriebsvorrichtungen 1A und 1B können auch anderweitig mit dem Fluggeräterumpf 220 gekoppelt sein. Der Fluggerätekörper 220 und die Antriebsvorrichtungen 1A und 1B liegen hier im Wesentlichen in einer Ebene. - Bei dem dargestellten Fluggerät200 kann es sich beispielsweise um ein Luftfahrzeug, ein bemanntes Fluggerät, eine Drohne oder um sog. Micro Air Vehicles (MAVs) handeln.
- Zur weiteren Beschreibung des gezeigten Fluggeräts 200 wird ein Bezugssystem eingeführt, das eine erste Richtung 201, eine zweite Richtung 202 und eine Vertikalrichtung 203 bzw. Vertikalachse definiert. Die Vertikalrichtung 203 bzw. -achse entspricht der Richtung der Erdanziehungskraft, wenn das Fluggerät 200 am Boden ruht. Die Vertikalrichtung 203 steht senkrecht auf der vorstehend genannten Ebene, in der der Fluggeräterumpf 220 und die Antriebsvorrichtungen 1A und 1B liegen. Die erste Richtung 201 und die zweite Richtung 202 bzw. die zugehörigen Achsen liegen in der besagten Ebene und stehen damit jeweils senkrecht zur Vertikalrichtung. Wesentlich für das hier betrachtete Fluggerät 200 des zweiten Aspekts der Erfindung ist, dass die erste Richtung 201 und die zweite Richtung 202 nicht parallel zueinander sind. In dem gezeigten Ausführungsbeispiel stehen die erste Richtung 201 und die zweite Richtung 202 senkrecht aufeinander.
- Die so definierten Richtungen sollen fest mit dem Fluggerät 200 verankert sein.
- Das gezeigte Fluggerät 200 weist vier Antriebsvorrichtungen 1A und 1B auf. Bei den gezeigten Antriebsvorrichtungen 1A bzw. 1B handelt es sich um Cyclogyro-Rotoren. Eine nähere Beschreibung von Cyclogyro-Rotoren wurde bereits im Zusammenhang mit
Fig. 5 gegeben. Jede Antriebsvorrichtung 1A und 1B ist um eine ihr zugeordnete Drehachse 5 drehbar gelagert. Jede Antriebsvorrichtung 1A und 1B umfasst mehrere Rotorblätter 2, die um ihre Längsachse schwenkbar gelagert sind. Damit kann der Neigungswinkel der Rotorblätter 2 während der Rotation der Antriebsvorrichtung 1A bzw. 1B variiert werden. Durch die Steuerung der Rotationsgeschwindigkeit (im Folgenden auch Drehgeschwindigkeit genannt) der Antriebsvorrichtungen 1A bzw. 1B sowie der Steuerung der Neigungswinkel der Rotorblätter 2 können der Betrag sowie die Richtung der erzeugten Schubkraft bzw. des diese beschreibenden Schubvektors variiert werden. - In
Fig. 6 ist zu sehen, dass die vier Antriebsvorrichtungen 1A und 1B im Wesentlichen die Ecken eines Rechtecks oder Quadrats bilden. Im geometrischen Zentrum dieses Rechtecks bzw. Quadrats ist der Rumpf 220 positioniert. Zweckmäßig ist jede der Antriebsvorrichtungen 1A und 1B vom Zentrum bzw. Rumpf gleich weit entfernt. Dazu können die Arme 221 und 222 dieselbe Länge haben. In diesem Fall sind die Antriebsvorrichtungen 1A und 1B an den Ecken eines Quadrats angeordnet. - Die beiden Antriebsvorrichtungen 1A, die gegenüberliegenden Ecken des besagten Rechtecks bzw. Quadrats entsprechen, liegen auf einer gemeinsamen Geraden; in dem gezeigten Beispiel ist diese Gerade im Wesentlichen parallel zur ersten Richtung 201; ebenso liegen die beiden Antriebsvorrichtungen 1B, die ebenfalls gegenüberliegenden Ecken des besagten Rechtecks bzw. Quadrats entsprechen, auf einer gemeinsamen Geraden, die im Wesentlichen parallel zur zweiten Richtung 202 verläuft. Anzumerken ist, dass es sich bei den genannten Geraden nicht zwingend um eine gemeinsame Drehachse zu handeln braucht, an die die Antriebsvorrichtungen (starr) gekoppelt sind. Jede Antriebsvorrichtung 1A, 1B kann über eine eigene ihr zugeordnete Drehachse 5A, 5B rotieren, und es ist auch möglich, dass jede der Antriebsvorrichtungen 1A, 1B individuell angesteuert werden kann, insbesondere, um deren Drehgeschwindigkeit separat zu steuern.
- Die den Antriebsvorrichtungen 1A zugeordneten Drehachsen 5A sind in dem Ausführungsbeispiel von
Fig. 6 im Wesentlichen in die erste Richtung 201 ausgerichtet. Die den Antriebsvorrichtungen 1B zugeordneten Drehachsen 5B sind in dem Ausführungsbeispiel vonFig. 6 im Wesentlichen in die erste Richtung 202 ausgerichtet. InFig. 6 ist zu erkennen, dass die Drehachsen 5A, 5B nicht exakt parallel zur ersten Richtung 201 bzw. zweiten Richtung 202 ausgerichtet sind. Tatsächlich ist es erfindungsgemäß bereits, wenn jede der zugeordneten Drehachsen 5A, 5B im Wesentlichen in die erste Richtung 201 bzw. zweite Richtung 202 ausgerichtet ist. Erfindungsgemäß ist eine Drehachse 5A im Wesentlichen in die erste Richtung 201 ausgerichtet, wenn der Winkel, der zwischen der Drehachse 5A, und einer Achse, die in die erste Richtung 201 verläuft und die Drehachse 5A schneidet, eingeschlossen ist, geringer als 45°, bevorzugt geringer als 30°, besonders bevorzugt geringer als 15°, ist. Die Bezeichnung "im Wesentlichen in die erste Richtung ausgerichtet" schließt es somit nicht aus, dass die Drehachsen 5A auch exakt parallel zur ersten Richtung 201 sind. Für die Drehachsen 5B der zweiten Antriebsvorrichtungen 1B und die zweite Richtung 202 gilt Entsprechendes. - Das erfindungsgemäße Fluggerät 200 ist so ausgelegt, dass es einen Schwebeflug durchführen kann, indem jede der zwei gezeigten Antriebsvorrichtungen 1A im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse 5A dreht, und/oder jede der zwei gezeigten Antriebsvorrichtungen 1B im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse 5B dreht. Die konstruktiven Einschränkungen, die sich daraus für das Fluggerät 200 ergeben, werden im Zusammenhang mit den weiteren Figuren, insbesondere
Figuren 7a und 7b , erläutert. - In
Figur 7a ist ein Fluggerät 200 gemäß dem zweiten Aspekt der Erfindung in stark schematischer Darstellung in Draufsicht gezeigt. Zu sehen sind zunächst der bereits im Zusammenhang mitFigur 6 beschriebene Fluggeräterumpf 220, die Antriebsvorrichtungen 1A1, 1A2 und 1B3, 1B4 die ihnen jeweils zugeordneten Drehachsen 5A bzw. 5B, die erste Richtung 201 und zweite Richtung 202; die erste Richtung 201 steht senkrecht auf der zweiten Richtung 202. - Zur Beschreibung der mathematisch-physikalischen Zusammenhänge ist es zweckmäßig, ein (kartesisches) orthogonales Koordinatensystem einzuführen. In
Figuren 7a und 7b wird ein kartesisches Koordinatensystem mit x-, y- und z-Achsen verwendet. Es soll beachtet werden, dass im Allgemeinen die erfindungsgemäße erste und zweite Richtung nicht den Achsen eines kartesischen Koordinatensystems zu entsprechen brauchen. Die erste und zweite (und ggf. weitere) Richtung dienen der Definition der Drehachsen der Antriebsvorrichtungen, während das (kartesische) orthogonale Koordinatensystem der zweckmäßigen mathematischen Beschreibung des Fluggeräts dienen soll. - Darüber hinaus ist der Massenschwerpunkt S, 250 des Fluggeräts 200 gezeigt. Die Lage bzw. Positionierung des Massenschwerpunkts S, 250 ist für den Ausgleich der durch die in im Wesentlichen gleiche Drehrichtung rotierenden Antriebsvorrichtungen 1A1, 1A2 bzw. 1B3, 1B4 verursachten gleich gerichteten Drehmomente von zentraler Bedeutung. Dies wird näher im Hinblick auf
Figur 7b beschrieben. In dem gezeigten Beispiel ist der Massenschwerpunkt S, 250 derart positioniert, dass das Fluggerät 200 den Magnus-Effekt sowohl im Vorwärtsflug in (positive) erste Richtung 201 (hier mit der positiven x-Richtung übereinstimmend) und im Vorwärtsflug in (positive) zweite Richtung 202 (hier mit der positiven y-Richtung übereinstimmend) ausnützen kann. Bewegt sich das Fluggerät 200 im Vorwärtsflug in die erste Richtung 201, rotieren die Antriebsvorrichtungen 1B3, 1B4 im Wesentlichen in dieselbe Drehrichtung um die zugehörigen Drehachsen 5B, und zwar vorteilhafterweise im Uhrzeigersinn. Wie oben im Zusammenhang mit dem ersten Aspekt definiert, bedeutet dies, dass die zwei Antriebsvorrichtungen 1B3, 1B4 bezüglich der inFig. 7a angegebenen zweiten Richtung (y-Achse) rechtsdrehend sind. Anders ausgedrückt: Das Skalarprodukt eines jeden der den Antriebsvorrichtungen 1B3, 1B4 zugeordneten Vektors der Winkelgeschwindigkeit mit dem Einheitsvektor in zweiter Richtung ist positiv. Losgelöst vom verwendeten Bezugssystem kann man auch sagen, dass die Antriebsvorrichtungen 1B3, 1B4 derart rotieren, dass die Fläche der Antriebsvorrichtungen 1B3, 1B4, die im Vorwärtsflug zuerst auf die angeströmte Luft trifft, entgegen der Richtung der Erdanziehungskraft dreht. Bewegt sich das Fluggerät 200 im Vorwärtsflug in die zweite Richtung 202, rotieren die Antriebsvorrichtungen 1A1, 1A2 im Wesentlichen in dieselbe Drehrichtung um die zugehörigen Drehachsen 5A, und zwar vorteilhafterweise im Gegenuhrzeigersinn. Die vorstehend gegebene Definition gilt entsprechend. In dem inFig. 7a gezeigten Koordinatensystem bedeutet dies, dass das Skalarprodukt eines jeden der den Antriebsvorrichtungen 1A1, 1A2 zugeordneten Vektors der Winkelgeschwindigkeit mit dem Einheitsvektor in erster Richtung ist negativ. Losgelöst vom verwendeten Bezugssystem gilt auch hier wieder, dass die Antriebsvorrichtungen 1A1, 1A2 derart rotieren, dass die Fläche der Antriebsvorrichtungen 1A1, 1A2, die im Vorwärtsflug zuerst auf die angeströmte Luft trifft, entgegen der Richtung der Erdanziehungskraft dreht. - Schließlich sind die Schubvektoren F 1, 2001; F 2, 2002; F 3 , 2003; und F 4, 2004 eingezeichnet, die aufgrund der Rotation der Antriebsvorrichtungen um die Drehachsen 5A bzw. 5B erzeugt werden. Die Schubvektoren F 1, 2001; F 2, 2002; F 3, 2003; und F 4, 2004 zeigen aus der Bildebene heraus, das heißt, es wird Auftrieb erzeugt.
- Im Vorwärtsflug in die erste Richtung (x-Achse) ist es auch möglich, dass - bei Rotation der Antriebsvorrichtungen 1B3, 1B4 in dieselbe Richtung - die Antriebsvorrichtungen 1A1, 1A2 gegenläufig rotieren, d.h. eine im Uhrzeigersinn, die andere im Gegenuhrzeigersinn. Entsprechendes gilt für den Vorwärtsflug in die zweite Richtung (y-Achse). Die Richtung der Schubvektoren F 1, 2001; F 2, 2002; F 3, 2003; und F 4, 2004 bleibt davon unberührt.
-
Figuren 7b und7c zeigen das inFigur 7a in Draufsicht dargestellte Fluggerät gemäß dem zweiten Aspekt der Erfindung in unterschiedlichen Seitenansichten und in stark schematischer Darstellung. In der Seitenansicht derFig. 7b sind die zwei Antriebsvorrichtungen 1A1, 1A2 und eine der zwei Antriebsvorrichtungen 1B3, 1B4 zu sehen. In der Seitenansicht derFig. 7c sind die zwei Antriebsvorrichtungen 1B3, 1B4 und eine der zwei Antriebsvorrichtungen 1A1, 1A2 zu sehen. Die den Antriebsvorrichtungen 1A1, 1A2 zugeordneten Drehachsen 5A sind parallel zur ersten Richtung 201 (hier: x-Richtung); die den Antriebsvorrichtungen 1B3, 1B4 zugeordneten Drehachsen 5B sind parallel zur zweiten Richtung (hier: y-Richtung) (welche in die Blattebene hineinzeigt). - In dem betrachteten erfindungsgemäßen Ausführungsbeispiel sollen die Antriebsvorrichtungen 1B3, 1B4 in die gleiche Drehrichtung 251 mit einer bestimmten zugeordneten Rotationsgeschwindigkeit drehen. In
Fig. 7b rotieren die beiden Antriebsvorrichtungen 1B3, 1B4 im Uhrzeigersinn, wie oben definiert. Wie schon ausgeführt, wird durch die Rotation jeder Antriebsvorrichtung 1B3, 1B4 ein Schubvektor erzeugt. In der Notation gemäßFig. 7b wird der von den beiden Antriebsvorrichtungen 1B3, 1B4 gemeinsam erzeugte Schubvektor mit F 34, 2034, wobei F 34 = F 3 + F 4 (vgl.Fig. 7a ), bezeichnet. Dadurch, dass die Antriebsvorrichtungen 1B3, 1B4 in dieselbe Drehrichtung 251 rotieren, wirken alle entstehenden (Antriebs-)Drehmomente M 34, 280 ebenfalls in die gleiche Richtung, wobei hier M 34, 280 das (Antriebs-)Drehmoment beider Antriebsvorrichtungen 1B3, 1B4 bezeichnet, also M 34 = M 3 + M 4. - Die Antriebsvorrichtungen 1A1, 1A2 erzeugen Schubvektoren F 1, 2001; bzw. F 2, 2002. Auf die Rotationsrichtung der Antriebsvorrichtungen 1A1, 1A2 kommt es bei der hiesigen Betrachtung, die eine für den Vorwärtsflug in erster Richtung 201 günstige Auslegung des Fluggeräts betrifft, nicht an. Aus Symmetriegründen ist es allerdings vorzuziehen, das Fluggerät so auszulegen, dass eine stabile Fluglage, insbesondere ein stabiler Vorwärtsflug, auch bei gleich rotierenden Antriebsvorrichtungen 1A1, 1A2 möglich ist. Dies wird weiter unten noch beschrieben.
- Im Hinblick auf
Fig. 7b werden Impuls- und Drallsatz um den Massenschwerpunkt S, 250 des Fluggeräts aufgestellt, wobei im dargestellten Fall nur der Impulssatz in Vertikalrichtung 203 (z-Achse) und der Drallsatz um die zweite Richtung 202 (y-Achse) relevant sind, da nur hier Kräfte bzw. Drehmomente wirken. - Die Bedingungen für einen stabilen Schwebeflug lauten dann:


- Die (Beträge der) Schubvektoren F 1, F 2 und F 34 können derart eingestellt werden, um die beiden Gleichgewichtsbedingungen zu erfüllen. Zweckmäßigerweise werden die Schubvektoren durch die Schubvektorsteuerung eingestellt.
- Es ist aber auch möglich, die beiden Gleichgewichtsbedingungen zu verwenden, um den Massenschwerpunkt des Fluggeräts derart zu bestimmen, dass die besagten Bedingungen für den Schwebeflug bei bestimmten vorgegebenen Schubvektoren F 1, F 2 und F 34 erfüllt werden.
- Das in
Fig. 7b gezeigte Drehmoment M 34, 280 entspricht dem (Antriebs-)Drehmoment beider Antriebsvorrichtungen 1B3, 1B4. Wie schon im Zusammenhang mit dem ersten Aspekt der Erfindung ausgeführt, besteht zwischen dem Betrag des Drehmoments M 34, 280 und dem Betrag des Schubvektoren F 34, ein mathematisch-physikalischer Zusammenhang. Dieser wird durch die oben angegebene Gleichung (6) bestimmt. Jede Antriebsvorrichtung kann einen anderen Proportionalitätsfaktor a aufweisen. Allerdings nehmen die Werte von a von verschiedenen Antriebsvorrichtungen gleicher Bauart bzw. Baugröße typischerweise die gleiche Größenordnung an. Zweckmäßig sind sie im Wesentlichen identisch. - Gemäß Gleichung (6) können die Beträge M 1, M 2, M 3, M 4 der Drehmomente geschrieben werden als

- Da in dem betrachteten Ausführungsbeispiel aufgrund der parallelen Ausrichtung der Drehachsen der Antriebsvorrichtungen 1B3, 1B4 bei gleicher Drehrichtung M 3 und M 4 parallel sind, gilt auch betragsmäßig:

- Es soll hier erwähnt werden, dass die vorstehende Gleichung auch als gute Näherung gilt für den allgemein betrachteten Fall von im Wesentlichen in die gleiche Richtung ausgerichteten Drehachsen.
- Daraus ergibt sich die Drehmomentengleichung (18) zu

- Hierin bezeichnen F 1, F 2 die Beträge der von den Antriebsvorrichtungen 1A1 bzw. 1A2 erzeugten Schubvektoren F 1, 2001; F 2, 2002; l 1, 231 den bez. der ersten Richtung bestimmten Abstand des Schubvektors F 1, 2001 vom Massenschwerpunkt S, 250 des Fluggeräts (wobei dieser Abstand l 1 mit dem Abstand bez. der ersten Richtung zwischen Massenschwerpunkt S, 250 des Fluggeräts und dem geometrischen Zentrum entlang der Drehachse 5A der Antriebsvorrichtung 1A1 identifiziert werden kann; anders ausgedrückt: l 1 ist der Abstand bez. der ersten Richtung vom Massenschwerpunkt S, 250 des Fluggeräts zur halben Spannweite der Antriebsvorrichtung 1A1); l 2, 232 den bez. der ersten Richtung bestimmten Abstand des Schubvektors F 2, 2002 vom Massenschwerpunkt S, 250 des Fluggeräts (wobei dieser Abstand l 2 mit dem Abstand bez. der ersten Richtung zwischen Massenschwerpunkt S, 250 des Fluggeräts und dem geometrischen Zentrum der Antriebsvorrichtung 1A2 entlang der Drehachse 5A identifiziert werden kann; anders ausgedrückt: l 2 ist der Abstand bez. der ersten Richtung vom Massenschwerpunkt S, 250 des Fluggeräts zur halben Spannweite der Antriebsvorrichtung 1A2); F 34 den Betrag der von beiden Antriebsvorrichtungen 1B3 und 1B4 erzeugten Schubvektor F 34 = F 3 + F 4, 2034; l 34, 234 den bez. der ersten Richtung bestimmten Abstand zwischen dem Massenschwerpunkt S, 250 des Fluggeräts, einerseits, und dem Schubvektor F 34, 2034 bzw. den Drehachsen der Antriebsvorrichtungen 1B3 und 1B4 bzw. der Geraden, die durch die Antriebsvorrichtungen 1B3 und 1B4verläuft, andererseits (wobei hier angenommen wird, dass die Antriebsvorrichtungen 1B3 und 1B4 auf einer geraden liegen, die - zumindest näherungsweise - parallel zur zweiten Richtung verläuft); a 34 der den Antriebsvorrichtungen 1B3 und 1B4zugeordnete Proportionalitätsfaktor.
- Diese Gleichung kann nun in ein Verhältnis der Beträge F 1 und F 2 der beiden Schubvektoren F 1, 2001 bzw. F 2, 2002 umgeformt werden:

- Gleichung (19) kann als Konfigurationsformel für das Fluggerät dienen. Die Gleichung (19) enthält zunächst vier frei wählbare Größen (aus der Menge von F 1, F 2, F 34, l 1, l2, l 34), allerdings ist in einer stabilen Fluglage noch Gleichung (17) zu beachten, weshalb nur drei der vorstehend genannten vier Größen frei gewählt werden können.
- Eine entsprechende Konfigurationsformel erhält man auch für den Fall, dass der Impulssatz in Vertikalrichtung 203 (z-Achse) und der Drallsatz um die erste Richtung 201 (x-Achse) aufgestellt werden. Dazu wird Bezug genommen auf
Fig. 7c . Eine solche Betrachtung ist erforderlich, wenn man den erfindungsgemäßen Effekt, d.h. insbesondere den positiven Beitrag des Magnus-Effekts, auch beim Vorwärtsflug in die zweite Richtung (y-Achse) nutzen möchte. - Die Bedingungen für einen stabilen Schwebeflug lauten dann:


- Die Bezeichnungen gelten wie im Falle der Gleichungen (17) und (18), allerdings mit den verschobenen Indizes: 1 → 3; 2 - 4; 3 → 1; 4 → 2. Auf eine erneute Wiedergabe der einzelnen Ausdrücke wird daher verzichtet. Insbesondere ist M 12, 285, das gesamte von den Antriebsvorrichtungen 1A1, 1A2 erzeugte Drehmoment.
- Unter Berücksichtigung der Ausführungen in Zusammenhang mit Gleichungen (17) und (18) im Hinblick auf Gleichung (6) kann die Drehmomentengleichung (21) geschrieben werden als:

- Hierin bezeichnen F 3, F 4 die Beträge der von den Antriebsvorrichtungen 1B3 bzw. 1 B4erzeugten Schubvektoren F 3, 2003; F 4, 2004 (vgl.
Fig. 7a ); l3, 236, den bez. der zweiten Richtung bestimmten Abstand des Schubvektors F 3 vom Massenschwerpunkt S, 250 des Fluggeräts (wobei dieser Abstand l 3 mit dem Abstand bez. der zweiten Richtung zwischen Massenschwerpunkt S, 250 des Fluggeräts und dem geometrischen Zentrum der Antriebsvorrichtung 1B3 entlang der Drehachse 5B identifiziert werden kann; anders ausgedrückt: l 3 ist der Abstand bez. der zweiten Richtung vom Massenschwerpunkt S, 250 des Fluggeräts zur halben Spannweite der Antriebsvorrichtung 1B3); l 4, 237, den bez. der zweiten Richtung bestimmten Abstand des Schubvektors F 4 vom Massenschwerpunkt S, 250 des Fluggeräts (wobei dieser Abstand l 4 mit dem Abstand bez. der zweiten Richtung zwischen Massenschwerpunkt S, 250 des Fluggeräts und dem geometrischen Zentrum der Antriebsvorrichtung 1B4 entlang der Drehachse 5B identifiziert werden kann; anders ausgedrückt: l 4 ist der Abstand bez. der zweiten Richtung vom Massenschwerpunkt S, 250 des Fluggeräts zur halben Spannweite der Antriebsvorrichtung 1B4); F 12 den Betrag der von beiden Antriebsvorrichtungen 1A1 und 1A2 erzeugten Schubvektor F 12 = F 1 + F 2, 2012; l 12, 239, den bez. der zweiten Richtung bestimmten Abstand zwischen dem Massenschwerpunkt S, 250 des Fluggeräts, einerseits, und dem Schubvektor F 12, 2012, bzw. den Drehachsen der Antriebsvorrichtungen 1A1 und 1A2 bzw. der Geraden, die durch die Antriebsvorrichtungen 1A1 und 1A2 verläuft, andererseits (wobei hier angenommen wird, dass die Antriebsvorrichtungen 1A1 und 1A2 auf einer Geraden liegen, die - zumindest näherungsweise - parallel zur ersten Richtung verläuft); a 12 der den Antriebsvorrichtungen 1A1 und 1A2 zugeordnete Proportionalitätsfaktor. - Diese Gleichung kann nun in ein Verhältnis der Beträge F 3 und F 4 der beiden Schubvektoren F 3 bzw. F 4 umgeformt werden:

- Aufgrund der Topologie der sternförmigen Anordnung der Antriebsvorrichtungen 1A1, 1A2, 1B3 und 1B4 ist es zweckmäßig, wenn jeweils ein Paar von Antriebsvorrichtungen 1A1, 1A2oder 1B3, 1B4 die Hälfte des erforderlichen Schubes erzeugt. Dadurch ergibt sich die Randbedingung

- Hier muss beachtet werden, dass dies nicht notwendig impliziert, dass sämtliche Schubvektoren F 1, F 2, F 3, und F 4 gleich sein müssen; es ist dafür ausreichend, wenn jeweils die Summe der Schubvektoren von zwei gegenüberliegenden Antriebsvorrichtungen gleich ist. Dafür können aber auch alle Schubvektoren F 1, F 2, F 3, und F 4 einzeln für sich betrachtet unterschiedlich sein.
- Eine weitere, zweckmäßige Randbedingung ergibt sich, wenn gefordert wird, dass die Antriebsvorrichtungen vorzugsweise zentral am Fluggeräterumpf 220 angebracht sind. Das heißt, es soll gelten


- Dies Randbedingungen (23) und (24a) führen zu folgender Konfigurationsformel:


- Zweckmäßigerweise kann man davon ausgehen, dass die Proportionalitätsfaktoren gleich sind, a 12 = a 34 ≡ a.
- Hier soll als Nächstes die Anzahl der frei vorgebbaren Schubvektoren anhand von Gleichungen (17), (18), (20) und (21) bestimmt werden. Geht man davon aus, dass die Positionen der Antriebsvorrichtungen fest sind, so hat man in den besagten Gleichungen die folgenden Unbekannten: F 1, F 2, F 3, F 4, l12 und l 34. Weiter muss beachtet werden, dass Gleichungen (17) und (20) die identische Einschränkung vorgeben. Man hat also drei Gleichungen für sechs Unbekannte. Der Massenschwerpunkt soll vermittels l12 und l 34 bestimmt werden; damit legen die Gleichungen (17), (18), (20) und (21) noch einen Schubvektor fest; drei der vier Schubvektoren F 1, F 2, F 3 können somit beliebig vorgegeben werden. Werden weitere Randbedingungen berücksichtigt, reduziert sich die Anzahl der frei vorgebbaren Schubvektoren entsprechend.
- Es gibt mehrere Möglichkeiten, die Gleichungen (17), (20), (25a), (25b) zu erfüllen.
- (i) In einer ersten Fallgestaltung kann gefordert werden, dass das Fluggerät symmetrisch ausgelegt ist. Das heißt, der Massenschwerpunkt S, 250 befindet sich exakt in der Mitte zwischen den (Massenschwerpunkten der) Antriebsvorrichtungen 1A1, 1A2 und/oder 1B3, 1B4. In diesem Fall ist l 1 = l 2 und/oder l 3 = l 4. Aus Gleichungen (25a), (25b) ergibt sich dann


- Wegen
- Bei dieser Fallgestaltung wird der Massenschwerpunkt S, 250 daher tendenziell in die positive erste und/oder zweite Richtung wandern, was zur Folge hat, dass l 1 < l 2 und/oder l 3 < l 4 wird, und die Differenz der erforderlichen Schubvektoren F 1 und F 2 bzw. F 3 und F 4 der Antriebsvorrichtungen 1A1, 1A2bzw. 1B3, 1B4weiter ansteigt.
- (ii) In einer zweiten Fallgestaltung sind besonders bevorzugt die zwei Antriebsvorrichtungen 1A1, 1A2konstruktiv identisch ausgestaltet und/oder die zwei Antriebsvorrichtungen 1B3, 1B4konstruktiv identisch ausgestaltet. Das heißt, sie sind baugleich und besitzen beispielsweise die gleiche Größe, die gleiche Spannweite, die gleiche Anzahl von Rotorblättern und/oder erzeugen ähnliche oder gleiche (maximale) Schubkräfte / Schubvektoren. In diesem Fall ist also F 1 = F 2 (oder F 1 ≈ F2 ) und/oder F 3 = F 4 (oder F 3 ≈ F 4).
- Aus Gleichungen (25a) und (25b) folgen sich dann


- Man erkannt, dass der Massenschwerpunkt S, 250 des Fluggeräts entlang der ersten Richtung 201 und/oder zweiten Richtung von der (geometrischen) Mitte l/2 zwischen jeweils gegenüberliegenden Antriebsvorrichtungen 1A1, 1A2bzw. 1B3, 1B4in Richtung der bezüglich der Vorwärtsflugrichtung hinteren Antriebsvorrichtungen 1A2, 1B4verschoben sind, und zwar gemäß Gleichungen (24a) bzw. (24b) um


- Wird nun ein Fluggerät mit konstruktiv identischen, gleich großen Antriebsvorrichtungen 1A1, 1A2und/oder 1B3, 1B4und somit annähernd gleich großen Schubkräften / Schubvektoren pro Paar von Antriebsvorrichtungen 1A1, 1A2bzw. 1B3, 1B4konfiguriert, kann der Massenschwerpunkt S, 250 also optimalerweise so positioniert werden, dass die von den Antriebsvorrichtungen erzeugten Drehmomente rein durch die Lage des Massenschwerpunktes S, 250 ausgeglichen wird. Die besagte optimale Position ist durch Gleichungen (27a) und/oder (27b) bestimmt.
- Hier und im Folgenden muss beachtet werden, dass für die Betrachtungen betreffend die gleich drehenden Antriebsvorrichtungen 1B3, 1B4lediglich die Position des Massenschwerpunktes in die erste Richtung 201 eine Rolle spielt. Die Lagerung bzw. Positionierung des Massenschwerpunkts bezüglich der zweiten Richtung und Vertikalrichtung 203 ist hier nicht relevant und liegt im Ermessen des Fachmanns. Entsprechend gilt, dass für die Betrachtungen betreffend die gleich drehenden Antriebsvorrichtungen 1A1, 1A2lediglich die Position des Massenschwerpunktes in die zweite Richtung eine Rolle spielt. Die Lagerung bzw. Positionierung des Massenschwerpunkts bezüglich der ersten Richtung 201 und Vertikalrichtung 203 ist in diesem Fall nicht relevant. Soll das Fluggerät allerdings die positive Wirkung des Magnus-Effekts sowohl bei Vorwärtsbewegung in die erste Richtung als auch bei Vorwärtsbewegung in die zweite Richtung ausnützen, ist die optimale Lage des Massenschwerpunkts durch beide Gleichungen (27a) und (27b) festgelegt, sodass lediglich seine Positionierung bez. der Vertikalrichtung 203 frei wählbar bleibt.
- (iii) Erfindungsgemäß ist es auch möglich, dass Aspekte der ersten Fallgestaltung (i) und der zweiten Fallgestaltung (ii) miteinander kombiniert werden. Das bedeutet, der Massenschwerpunkt S, 250 des Fluggeräts kann aus dem geometrischen Zentrum des Fluggeräterumpfs 220 derart verschoben werden, dass die Bedingungen (17), (20), (25a), (25b) für einen stabilen Schwebeflug bei bestimmten vorgegebenen, auch unterschiedlichen, Schubvektoren / Schubkräften von einzelnen der Antriebsvorrichtungen erfüllt sind.
- Für praktische Anwendungen ist es nicht immer möglich, die Massen in einem Fluggerät so zu platzieren, dass der Gesamtmassenschwerpunkt S, 250 exakt an der in (i), (ii) oder (iii) beschriebenen vorgegebenen optimalen Position positioniert werden kann (für die Fallgestaltung (i) ist l 1 = l 2 und/oder l 3 = l 4; für die Fallgestaltung (ii) vgl. Gleichungen (26a), (26b), (27a), (27b)). Daher wird nachfolgend ein Bereich definiert, in welchem der Massenschwerpunkt S, 250 liegen kann, sodass es noch möglich ist, den Drehmomentenausgleich mit den Schubkräften / Schubvektoren F 1, 2001, F 2, 2002 der Paare von Antriebsvorrichtungen 1A1, 1A2bzw. den Drehmomentenausgleich mit den Schubkräften / Schubvektoren F 3, 2003, F 4, 2004 der Paare von Antriebsvorrichtungen 1B3, 1B4zu unterstützen.
- Dazu wird zunächst angenommen, dass eine der Antriebsvorrichtungen 1A1, 1A2, 1B3, 1B4 eine maximal zulässige (i.d.R. vorgegebene) Schubkraft / maximal zulässigen Schubvektor von Fi,max erzeugen kann. Dabei wird angenommen, dass Fi,max größer oder gleich den der optimalen Konfiguration entsprechenden Schubkräften Fi,opt sind (wie auch schon im Zusammenhang mit dem ersten Aspekt der Erfindung näher beschrieben).
- Unter Berücksichtigung des Impulssatzes gemäß Gleichung (17) ergibt sich zunächst


- Für den Fall


- Unter Verwendung der Randbedingung der Gleichung (23), F 12 = F 34, in Gleichungen (17) und (20) erhält man

- Diese Schubvektorverhältnisse F 1/F 2 werden auch durch Gleichung (25a) beschrieben; unter Verwendung der letzteren lassen sich der maximal zulässige Abstand in die erste Richtung 201 des Massenschwerpunkts S, 250 vom geometrischen Zentrum der im Vorwärtsflug vorderen Antriebsvorrichtung 1A1, zu


- Liegt der Massenschwerpunkt S, 250 bezüglich der ersten Richtung 201 außerhalb des Bereiches

- Vermittels der Gleichung (24a) kann der zulässige Bereich (28) in der ersten Richtung auch bezüglich der Drehachsen der Antriebsvorrichtungen 1B3, 1B4 bzw. der Geraden, die durch die Antriebsvorrichtungen 1B3, 1B4verläuft, angegeben werden. Dann erfolgt die Angabe des Bereichs mithilfe des Abstands l 34 und entsprechenden Grenzen l 34,min und l 34,max .
- Analog erhält man für den zulässigen Bereich des Massenschwerpunkts S, 250 bezüglich der zweiten Richtung (hier: y-Richtung)





- Vermittels der Gleichung (24b) kann der zulässige Bereich (29) in der zweiten Richtung auch bezüglich der Drehachsen der Antriebsvorrichtungen 1A1, 1A2bzw. der Geraden, die durch die Antriebsvorrichtungen 1A1, 1A2verläuft, angegeben werden. Dann erfolgt die Angabe des Bereichs mithilfe des Abstands l 12 und entsprechenden Grenzen l 12,min und l 12,max .
-
Figur 7d dient der Veranschaulichung des vorstehend beschriebenen Bereichs, in dem sich der Massenschwerpunkt S, 250 des Fluggeräts zweckmäßigerweise zur Umsetzung der Erfindung gemäß dem zweiten Aspekt befinden kann.Fig. 7d zeigt schematisch ein Fluggerät mit Antriebsvorrichtungen 1A1, 1A2und 1B3, 1B4, das dem im Zusammenhang mitFiguren 7a und 7b beschriebenen entspricht. Es wird weiter angenommen, dass die Antriebsvorrichtungen 1A1, 1A2 1B3, 1B4konstruktiv identisch ausgestaltet sind (s. Fallgestaltung (ii) oben), hier insbesondere: a 1 = a 2 = a 3 = a 4 = a 12 = a 34 ≡ a. - Zuerst wird weiter angenommen, dass der Drehmomentenausgleich rein über die Lage des Massenschwerpunktes S, 250 realisiert werden soll, wodurch



Figuren 7a, 7b : x-Richtung) wird als
- Auf Basis dieser Vorgaben ergibt sich aus Gleichungen (25a) und (26a) eine optimale Massenschwerpunktlage von

- Ist es nicht möglich, den Gesamtmassenschwerpunkt S, 250 des Fluggerätes auf die Position l 1,opt = 1,1 m zu legen, wird nun ein Bereich definiert, in welchem sich die Lage des Massenschwerpunktes S, 250 befinden kann, sodass der Drehmomentenausgleich von den Schubkräften / Schubvektoren der Antriebsvorrichtungen 1A1, 1A2, 1B3, 1B4 kompensiert werden kann. Dazu wird die maximal zulässige Schubkraft, die von jeder der in erster Richtung angeordneten Antriebsvorrichtung 1A1, 1A2 erzeugt werden kann, die zweckmäßig durch von der Schubvektorsteuerung gesteuert wird, als

- Durch diese Vorgabe und unter Benutzung der Randbedingung gemäß Gleichung (23),






- Geht man davon aus, dass das Fluggerät symmetrisch ausgestaltet ist, erhält man für den für l 3 zulässigen Bereich dieselben Werte. Werden beide Bedingungen berücksichtigt, ist der Massenschwerpunkt S, 250 zweckmäßig bezüglich der durch die Antriebsvorrichtungen und den Fluggeräterumpf definierten Ebene in einem quadratischen Bereich positioniert, der durch die angegebenen Grenzen bestimmt ist. Die Positionierung bezüglich der Vertikalrichtung ist nicht eingeschränkt.
- Abschließend wird noch ausgeführt, dass der zweite erfindungsgemäße Aspekt nicht auf Fluggeräte mit vier Antriebsvorrichtungen beschränkt ist. Es ist auch möglich, dass beispielsweise entlang einer Richtung mehr als zwei Antriebsvorrichtungen angeordnet sind oder auch, dass einige Antriebsvorrichtungen auf zueinander parallelen Geraden angeordnet sind.
- Die Gleichungen (17), (18), (20), (21) werden nun für ein erfindungsgemäßes Fluggerät mit n, n > 2, Antriebsvorrichtungen 1C verallgemeinert.
Figur 8a zeigt einen Ausschnitt eines solchen Fluggeräts in Draufsicht;Figur 8b einen Ausschnitt des Fluggeräts in Seitenansicht. Wir nehmen an, dass die mathematisch-physikalische Beschreibung des Fluggeräts in einem kartesischen Koordinatensystem mit x-, y- und z-Achse erfolgt. Die n Antriebsvorrichtungen 1C und der Fluggeräterumpf 220 befinden sich in der xy-Ebene, also in der Ebene mit z = 0. Die Antriebsvorrichtungen 1C sind um den Fluggeräterumpf 220 herum (sternförmig) in der Ebene z = 0 angeordnet. Der Ursprung O des Koordinatensystems liege im geometrischen Zentrum des Fluggeräts. Dann sei ri, i ∈ {1, ...,n} die Ortsvektoren zum i-ten Schubvektor der entsprechenden Antriebsvorrichtungen 1C. s sei der Ortsvektor zum Massenschwerpunkt S, 250 des Fluggeräts. Der Vektor der Gewichtskraft des Fluggeräts ist F S = (0,0,Fs ). In dem hier interessierenden Fall des stabilen Schwebeflugs sind die Schubvektoren F i, i ∈ {1, ..., n}, die von den Antriebsvorrichtungen erzeugt werden:
- Schließlich rotieren im Schwebeflug die Antriebsvorrichtungen mit der Winkelgeschwindigkeit ω i, i ∈ {1,...,n}, wobei es sich hier um Vektoren handelt, die in der xy-Ebene liegen. Das bereits einleitend ausführlich beschriebene Drehmoment, das vom Fluggerät aufgebracht werden muss, ist dann unter Beachtung der Beziehung Mi = ai * Fi :

- Die Gleichgewichtsbedingungen der Gleichungen (17), (18), (20), (21) lauten dann:


- Aus dem Drallsatz lässt sich der Ortsvektor s des Schwerpunktes S, 250 wie folg ermitteln: Mit








- Gleichung (32) liefert zwei Bedingungen, nämlich eine für die x-Komponenten der Drehmomente, und eine weitere für deren y-Komponenten. Die Gleichungen (31) und (32) (unter Beachtung des Zusammenhangs der Gleichung (30)) liefern somit drei Bedingungen für die Beträge Fi der n Schubvektoren sowie der zwei Koordinaten des Schwerpunkts. Es verbleiben somit n + 2 - 3 = n - 1 der n Schubvektoren, die vorgegeben werden können. Ein zweckmäßiger Bereich bezüglich der Ebene, in der die Antriebsvorrichtungen 1C und der Fluggeräterumpf 220 liegen, lässt sich somit auch in dem hier betrachteten allgemeineren Fall bestimmen, indem die Schubvektoren von einer oder mehrerer der n Antriebsvorrichtungen 1C variiert werden, und gefordert wird, dass der Massenschwerpunkt S, 250 derart positioniert sein muss (vgl. Gleichung (33)), dass der Drehmomentenausgleich gemäß Gleichung (32) von den Schubkräften / Schubvektoren der Antriebsvorrichtungen kompensiert werden kann. Dazu kann es zweckmäßig sein, eine oder mehrere der Antriebsvorrichtungen mit maximal zulässiger Schubkraft anzutreiben.
- Dadurch, dass die optimale Position des Massenschwerpunkts in der betrachteten Konfiguration durch den Schnittpunkt zweier Geraden bestimmt ist, ist es zweckmäßig, die erste Richtung und/oder die zweite Richtung, entlang denen die Antriebsvorrichtungen im Wesentlichen in dieselbe Richtung drehen, als die Richtungen zu betrachten, die senkrecht zu zwei vorgegebenen Vorwärtsflugrichtungen stehen. In diesem Fall ist der Massenschwerpunkt somit bevorzugt (i) bezüglich einer auf der ersten Richtung senkrecht stehenden und in der durch die Antriebsvorrichtungen und den Fluggeräterumpf definierten Ebene liegenden Richtung aus dem geometrischen Zentrum heraus verschoben, und/oder (ii) bezüglich einer auf der zweiten Richtung senkrecht stehenden und in der durch die Antriebsvorrichtungen und den Fluggeräterumpf definierten Ebene liegenden Richtung aus dem geometrischen Zentrum heraus verschoben.
-
Figur 9a zeigt ein Ausführungsbeispiel gemäß dem zweiten Aspekt der Erfindung, bei dem drei Antriebsvorrichtungen 1C1, 1C2, 1C3 derart um den Fluggeräterumpf 220 des Fluggeräts angeordnet sind, dass sie die Ecken eines gleichseitigen Dreiecks bilden. Es ist gezeigt, dass die Antriebsvorrichtungen 1C, und 1C2 auf einer geraden g 1 angeordnet sind; g 1 definiert dabei die erste erfindungsgemäße Richtung. Die Antriebsvorrichtung 1C3 ist in dem gezeigten Ausführungsbeispiel auf einer Geraden g 2 angeordnet, die senkrecht auf der Geraden g 1 steht und durch das geometrische Zentrum G des Fluggeräts, hier also durch das geometrische Zentrum G des gleichseitigen Dreiecks, verläuft. Die Gerade g 2 definiert die erfindungsgemäße zweite Richtung. Die Drehachsen 5C1, 5C2, 5C3 der Antriebsvorrichtungen 1C1, 1C2 bzw. 1C3 zeigen hier zum geometrischen Zentrum G hin (bzw. davon weg). In dem gezeigten Ausführungsbeispiel ist nur die Drehachse 5C3 exakt parallel zur durch g 2 definierten zweiten Richtung ausgerichtet. Die Drehachsen 5C1, 5C2 sind nicht exakt parallel zu der durch g 1 definierten ersten Richtung. Wie man mithilfe einfacher geometrischer Überlegungen feststellen kann, schließt die Drehachse 5C, mit der Geraden g 1 (ersten Richtung) einen Winkel α1 = 30° ein; ebenso schließt die Drehachse 5C2 mit der Geraden g 1 (ersten Richtung) einen Winkel α2 = 30° ein. Solche Winkel fallen unter den erfindungsgemäßen Begriff von im Wesentlichen in die erste Richtung ausgerichteten Drehachsen. Bevorzugt können die Winkel aber auch kleiner gewählt werden. Drehen die Antriebsvorrichtungen 1C1, 1C2 um diese Drehachsen im Wesentlichen in dieselbe Drehrichtung, wie oben definiert, tritt der erfindungsgemäße Erfolgt auch hier noch auf, wenn sich das Fluggerät insbesondere entlang der durch g 2 definierten zweiten Richtung bewegt. Drehen die Antriebsvorrichtungen 1C1, 1C3 um die zugehörigen Drehachsen 5C, bzw. 5C3 im Wesentlichen in dieselbe Drehrichtung, wirkt sich der erfindungsgemäße Vorteil insbesondere bei einer Bewegung entlang der Winkelhalbierenden 1C1-G-1C3 positiv aus. -
Figur 9b zeigt ein Fluggerät gemäß dem zweiten Aspekt der Erfindung, bei dem sieben Antriebsvorrichtungen 1C1, ..., 1C7 in einer Ebene um den Fluggeräterumpf 220 herum angeordnet sind. Die Antriebsvorrichtungen 1C1, ..., 1C7 sind derart angeordnet, dass sie die Ecken eines regelmäßigen Siebenecks bilden. Jede der Antriebsvorrichtungen ist um eine zugehörige Drehachse 5C1, ..., 5C7 drehbar gelagert. In dem gezeigten Ausführungsbeispiel zeigen die Drehachsen 5C1, ..., 5C7 zum geometrischen Zentrum G des Fluggeräts bzw. des Siebenecks. Dieses Ausführungsbeispiel soll zur Beschreibung des allgemeinen Falls dienen, bei dem (eine ungerade Anzahl) n = 2j + 1, j > 1, Antriebsvorrichtungen 1C1, ..., 1C2j+1 um den Fluggeräterumpf 220 derart angeordnet sind, dass sie die Ecken eines regelmäßigen (2j+ 1)-Ecks bilden. Die zugehörigen Drehachsen 5C1, ..., 5C2j+1 sollen zum geometrischen Zentrum G hin zeigen (oder davon weg). In diesem Fall ist es zweckmäßig, eine erste Gerade g 1 derart zu betrachten, die durch zwei Antriebsvorrichtungen 1C, und 1C(n+ 1)/2 verläuft; diese Gerade g 1 definiert die erfindungsgemäße erste Richtung. Weiter ist es zweckmäßig, eine zweite Gerade g 2 zu betrachten, die durch zwei Antriebsvorrichtungen 1C k und 1C k+(n-1)/2 verläuft,
- Mithilfe einfacher geometrischer Überlegungen erhält man, dass jede der Drehachsen 5C1 und 5C(n+1)/2 mit der Geraden g 1 (also der ersten Richtung) einen Winkel α1 = α (n+1)/2 = 90°/n einschließt; entsprechendes gilt für die Winkel zwischen den Drehachsen 5C k und 5C k+(n -1)/2 und der Geraden g 2: αR = α k+(n-1)/2 = 90°/n. Im Falle des gezeigten Siebenecks sind somit α 1 = a 3 = a 4 = α 6 = 90°/7 ≈ 12.86°. Für ein regelmäßiges (2j + 1)-Ecks ist es daher vorteilhaft, wenn die Drehachsen der Antriebsvorrichtungen, die auf den die erste bzw. zweite Richtung definierenden Geraden g 1 und g 2 liegen, mit den zugehörigen Geraden g 1 bzw. g 2 einen Winkel zwischen 0° und 90°/n einschließen.
- Der Winkel ε zwischen g 1 und g 2 ist gegeben durch
-
Figur 9c zeigt ein Fluggerät gemäß dem zweiten Aspekt der Erfindung, bei dem sechs Antriebsvorrichtungen 1C1, ..., 1C6 in einer Ebene um den Fluggeräterumpf 220 herum angeordnet sind. Die Antriebsvorrichtungen 1C1, ..., 1C6 sind derart angeordnet, dass sie die Ecken eines regelmäßigen Sechsecks bilden. Jede der Antriebsvorrichtungen ist um eine zugehörige Drehachse 5C1, ..., 5C6 drehbar gelagert. In dem gezeigten Ausführungsbeispiel zeigen die Drehachsen 5C1, ..., 5C6 zum geometrischen Zentrum G des Fluggeräts bzw. des Sechsecks. Dieses Ausführungsbeispiel soll zur Beschreibung des allgemeinen Falls dienen, bei dem (eine gerade Anzahl) n = 2j, j > 1, Antriebsvorrichtungen 1C1, ..., 1C2j um den Fluggeräterumpf 220 derart angeordnet sind, dass sie die Ecken eines regelmäßigen 2j-Ecks bilden. Der Fluggeräterumpf 220 befindet sich zwischen jeweils zwei gegenüberliegenden Antriebsvorrichtungen des regelmäßigen 2j-Ecks. Die zugehörigen Drehachsen 5C1, ..., 5C2j sollen zum geometrischen Zentrum G hin zeigen (oder davon weg). In diesem Fall ist es zweckmäßig, eine erste Gerade g 1 derart zu betrachten, die durch zwei Antriebsvorrichtungen 1C, und 1C n/2+1 verläuft; diese Gerade g 1 definiert die erfindungsgemäße erste Richtung. Weiter ist es zweckmäßig, eine zweite Gerade g 2 zu betrachten, die durch zwei Antriebsvorrichtungen 1C k und 1C k+n/2 verläuft, k = 1 + [n/4]; diese Gerade g 2 definiert die erfindungsgemäße zweite Richtung. - In dem gezeigten Ausführungsbeispiel sind Drehachsen der auf den Geraden g 1 und g 2 angeordneten Antriebsvorrichtungen (mathematisch exakt) parallel in die erste bzw. zweite Richtung ausgerichtet.
- Besonders bevorzugt stehen die erste und zweite Richtung im Wesentlichen senkrecht, speziell: senkrecht, aufeinander; dies ist immer dann möglich, wenn, die Antriebsvorrichtungen die Ecken eines 4j-Ecks bilden.
- Der Winkel ε zwischen g 1 und g 2 (also erster und zweiter Richtung) ist für die oben beschriebenen 2j-Ecke gegeben durch

- Aus den vorstehenden Ausführungsbeispielen erkennt man, dass für die Anordnung einer beliebigen (geraden oder ungeraden) Anzahl von Antriebsvorrichtungen an den Ecken eines regelmäßigen n-Ecks es ausreicht, wenn die Drehachsen der Antriebsvorrichtungen, die auf den die erste bzw. zweite Richtung definierenden Geraden g 1 und g 2 liegen, mit den zugehörigen Geraden g 1 bzw. g 2 einen Winkel zwischen 0° und 30° (für n > 2), besonders bevorzugt zwischen 0° und 18° (für n > 3) einschließen; des Weiteren ist es zweckmäßig, wenn die Geraden g 1 und g 2 (und somit die erste und zweite Richtung) derart gewählt werden, dass der Winkel zwischen ihnen größer oder gleich 60° beträgt, speziell im Bereich zwischen 60° und 90° liegt.
- Die Herleitung der Schubkraft und Leistung basiert auf der Strahltheorie, wodurch eine Antriebsvorrichtung / ein Rotor als Aktuatorscheibe ohne Information über Anzahl und Form der Rotorblätter betrachtet wird. Die Strömung wird dabei vereinfachend als eindimensional, quasistationär, inkompressibel und reibungsfrei definiert, wodurch sich die entsprechenden Erhaltungssätze für Masse, Impuls und Energie ergeben. Dabei werden nachfolgend alle Größen in der Aktuatorscheibenebene mit dem zusätzlichen Index a, alle Größen weit oberhalb der Aktuatorscheibenebene (Einströmebene) mit dem zusätzlichen Index 0 und alle Größen weit unterhalb der Aktuatorscheibenebene (Ausströmebene) mit dem zusätzlichen Index ∞ gekennzeichnet.
- Aufgrund der Annahmen bezüglich der Strömung folgt aus dem Massenerhaltungssatz der Massenstrom:

- ṁ ... Massenstrom
- ρ ... Dichte
- A ... Fläche
- v 0 ... Einströmgeschwindigkeit
- vi ... induzierte Geschwindigkeit
- Aufgrund der Annahmen bezüglich der Strömung folgt aus dem Impulserhaltungssatz die Schubkraft:

- F ... Schub
- ṗ ... Impulsänderung
- Da der Rotor die Einströmebene nicht beeinflusst, gilt v i0 = 0, woraus


- Aufgrund der Annahmen bezüglich der Strömung und v i0 = 0 folgt aus dem Energieerhaltungssatz die Leistung bzw. verrichtete Arbeit pro Zeiteinheit für die Aktuatorscheibenebene:

- Durch Einsetzen des Massenstroms in der Aktuatorscheibenebene folgt:

- Unter Verwendung der Schubkraft ergibt sich die Leistung zu:

- Aus diesen Gleichungen ergibt sich direkt der Zusammenhang


ausgedrückt werden kann. -
- 100
- Fluggerät gemäß dem ersten Aspekt der Erfindung
- 120
- Fluggerätekörper
- 1F
- im vorderen Bereich angeordnete Antriebsvorrichtungen
- 1R
- im hinteren Bereich angeordnete Antriebsvorrichtungen
- 101
- Längsrichtung des Fluggeräts 100
- 102
- Querrichtung des Fluggeräts 100
- 103
- Vertikalrichtung des Fluggeräts 100
- 121
- Bug / Nase des Fluggeräts 100
- 122
- Heck des Fluggeräts 100
- 1
- Antriebsvorrichtung
- 2
- Rotorblätter einer Antriebsvorrichtung
- 3
- Pitch-Mechanismus
- 31
- Kopplungsvorrichtung
- 32
- Ankopplungspunkt
- 33
- Lagerungsvorrichtung
- 4
- Offset-Vorrichtung
- 11
- Scheibe der Antriebsvorrichtung 1
- 5
- Drehachse einer Antriebsvorrichtung
- 51
- Drehrichtung einer Antriebsvorrichtung
- 52
- Radius der Antriebsvorrichtung
- 61
- Verbindungselement
- 7, 71
- Kraft auf eine Antriebsvorrichtung / Schubvektor
- 72
- Beitrag des Magnus-Effekts zum Schubvektor
- 8
- Drehmoment auf eine Antriebsvorrichtung
- 9
- Luftanströmung
- 110
- Pfeil zur Angabe der Bewegungsrichtung des Fluggeräts
- 150
- Massenschwerpunkt des Fluggeräts 100
- 701
- gesamter von den Antriebsvorrichtungen 1F erzeugter Schubvektor
- 702
- gesamter von den Antriebsvorrichtungen 1R erzeugter Schubvektor
- 81
- gesamtes von den Antriebsvorrichtungen 1F erzeugtes Drehmoment
- 82
- gesamtes von den Antriebsvorrichtungen 1R erzeugtes Drehmoment
- 131
- Abstand bez. der Längsrichtung zwischen Massenschwerpunkt 150 und Antriebsvorrichtungen 1F
- 132
- Abstand bez. der Längsrichtung zwischen Massenschwerpunkt 150 und Antriebsvorrichtungen 1R
- 160
- Gewichtskraft des Fluggeräts
- gi
- i-te Gerade, entlang der Antriebsvorrichtungen angeordnet sind
- ni
- Anzahl der Antriebsvorrichtungen, die entlang der Geraden gi angeordnet sind
- N
- Gesamtzahl der Geraden
- K
- Gesamtzahl der Antriebsvorrichtungen
- Fij
- der von der j-ten auf der Geraden gi angeordneten Antriebsvorrichtung erzeugte Schubvektor
- Fi
- Schubvektor, der von sämtlichen auf einer Geraden gi angeordneten Antriebsvorrichtungen erzeugt wird
- Mi
- Drehmoment, das von sämtlichen auf einer Geraden gi angeordneten Antriebsvorrichtungen erzeugt wird
- xi
- Längskoordinate der Geraden gi
- XS
- Längskoordinate des Massenschwerpunkts 150
- 200
- Fluggerät gemäß dem zweiten Aspekt der Erfindung
- 220
- Fluggeräterumpf
- 1A, 1B, 1C, 1A1, 1A2, 1B3, 1B4, 1Ci
- Antriebsvorrichtungen des Fluggeräts 200
- 221, 222
- Arme zur Kopplung der Antriebsvorrichtungen 1A, 1B an den Fluggeräterumpf 220
- 201
- erste Richtung
- 202
- zweite Richtung
- 203
- Vertikalrichtung
- 5A
- Drehachsen der Antriebsvorrichtungen 1A
- 5B
- Drehachsen der Antriebsvorrichtungen 1B
- 5Ci
- Drehachse der Antriebsvorrichtung 1Ci
- αi
- Winkel zwischen Drehachse 5Ci und erster oder zweiter Richtung
- ε
- Winkel zwischen erster und zweiter Richtung
- 250
- Massenschwerpunkt des Fluggeräts 200
- G
- geometrisches Zentrum
- O
- Ursprung des Koordinatensystems
- 2001, 2002
- Schubvektoren, die durch die Antriebsvorrichtungen 1A1 bzw. 1A2erzeugt werden
- 2003, 2004
- Schubvektoren, die durch die Antriebsvorrichtungen 1B3 bzw. 1B4erzeugt werden
- 2012
- gesamter Schubvektor, der von den Antriebsvorrichtungen 1A1, 1A2 erzeugt wird2034 gesamter Schubvektor, der von den Antriebsvorrichtungen 1B3, 1B4erzeugt wird
- 230
- Abstand der Schubvektoren / geometrischen Zentren der Antriebsvorrichtungen 1A1, 1A2
- 231
- Abstand des Schubvektors 2001 vom Massenschwerpunkt 250 des Fluggeräts
- 232
- Abstand des Schubvektors 2002 vom Massenschwerpunkt 250 des Fluggeräts
- 234
- Abstand zwischen dem Massenschwerpunkt 250 und dem Schubvektor F 34, 2034 / den Drehachsen der Antriebsvorrichtungen 1B3, 1B4 / der Geraden, die durch die Antriebsvorrichtungen 1B3, 1B4 verläuft
- 235
- Abstand der Schubvektoren / geometrischen Zentren der Antriebsvorrichtungen 1B3, 1B4
- 236
- Abstand des Schubvektors 2003 vom Massenschwerpunkt 250 des Fluggeräts
- 237
- Abstand des Schubvektors 2004 vom Massenschwerpunkt 250 des Fluggeräts
- 239
- Abstand zwischen dem Massenschwerpunkt 250 und dem Schubvektor F 12, 2012 / den Drehachsen der Antriebsvorrichtungen 1A1, 1A2 / der Geraden, die durch die Antriebsvorrichtungen 1A1, 1A2 verläuft
- 251
- Drehrichtung der Antriebsvorrichtungen 1B3, 1B4
- 280
- gesamtes von den Antriebsvorrichtungen 1B3, 1B4 erzeugtes Drehmoment
- 285
- gesamtes von den Antriebsvorrichtungen 1A1, 1A2 erzeugtes Drehmoment
Claims (22)
- Fluggerät (100) umfassend- einen Fluggerätekörper (120), der eine Längsrichtung (101), eine Vertikalrichtung (103) und eine Querrichtung (102) definiert, wobei die Längsrichtung der Richtung vom Heck (122) zur Nase (121) des Fluggeräts (100) entspricht, die Vertikalrichtung mit der Richtung der Erdanziehungskraft übereinstimmt, wenn das Fluggerät (100) am Boden ruht, und die Querrichtung senkrecht auf der Längsrichtung und der Vertikalrichtung steht, und- mindestens zwei Antriebsvorrichtungen (1, 1F, 1R), die um jeweils eine zugeordnete Drehachse (5) drehbar sind, um einen jeweils zugehörigen Schubvektor (701, 702) zu erzeugen; wobeiwobei das Fluggerät (100) dazu ausgelegt ist, einen Schwebeflug durchzuführen, bei dem sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts (150) des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, dadurch, dass im Schwebeflugeine erste Anzahl der Antriebsvorrichtungen (1F) entlang einer ersten Geraden, die parallel zur Querrichtung (102) verläuft, angeordnet ist, und eine zweite Anzahl der Antriebsvorrichtungen (1R) entlang einer zweiten Geraden, die parallel zur Querrichtung (102) verläuft, angeordnet ist,die erste Gerade von der zweiten Geraden beabstandet ist, undder Massenschwerpunkt des Fluggeräts (100) bezüglich der Längsrichtung (101) zwischen der ersten Geraden und der zweiten Geraden positioniert ist;- jede der zugeordneten Drehachsen (5) im Wesentlichen in Querrichtung (102) des Fluggerätekörpers ausgerichtet ist, und- jede der mindestens zwei Antriebsvorrichtungen (1, 1F, 1R) im Wesentlichen in dieselbe Drehrichtung (51) um die jeweils zugeordnete Drehachse (5) dreht.
- Fluggerät (100) nach Anspruch 1, wobei die erste Anzahl der Antriebsvorrichtungen (1F) bezüglich der Längsrichtung (101) in einem vorderen Bereich des Flüggeräts angeordnet ist, und die zweite Anzahl der Antriebsvorrichtungen (1R) bezüglich der Längsrichtung (101) in einem hinteren Bereich des Fluggeräts angeordnet ist.
- Fluggerät (100) nach Anspruch 2, wobei
der Massenschwerpunkt (150) des Fluggeräts, wenn es den Schwebeflug ausführt, in Längsrichtung in einem Abstand /1 von der Geraden, entlang der die Antriebsvorrichtungen (1F) im vorderen Bereich angeordnet sind, positioniert ist, wobei
 Rmin ein minimales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (701) entsprechenden Schubkräften der im vorderen Bereich angeordneten Antriebsvorrichtungen (1F), einerseits, und den zulässigen Werten der den Schubvektoren (702) entsprechenden Schubkräften der im hinteren Bereich angeordneten Antriebsvorrichtungen (1R), andererseits,Rmax ein maximales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (701) entsprechenden Schubkräften der im vorderen Bereich angeordneten Antriebsvorrichtungen (1F), einerseits, und den zulässigen Werten der den Schubvektoren (702) entsprechenden Schubkräften der im hinteren Bereich angeordneten Antriebsvorrichtungen (1R), andererseits,l der Abstand zwischen erster Geraden und zweiter Geraden,a 1 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die im vorderen Bereich angeordneten Antriebsvorrichtungen (1F), unda 2 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die im hinteren Bereich angeordneten Antriebsvorrichtungen (1R) sind.
Rmin ein minimales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (701) entsprechenden Schubkräften der im vorderen Bereich angeordneten Antriebsvorrichtungen (1F), einerseits, und den zulässigen Werten der den Schubvektoren (702) entsprechenden Schubkräften der im hinteren Bereich angeordneten Antriebsvorrichtungen (1R), andererseits,Rmax ein maximales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (701) entsprechenden Schubkräften der im vorderen Bereich angeordneten Antriebsvorrichtungen (1F), einerseits, und den zulässigen Werten der den Schubvektoren (702) entsprechenden Schubkräften der im hinteren Bereich angeordneten Antriebsvorrichtungen (1R), andererseits,l der Abstand zwischen erster Geraden und zweiter Geraden,a 1 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die im vorderen Bereich angeordneten Antriebsvorrichtungen (1F), unda 2 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die im hinteren Bereich angeordneten Antriebsvorrichtungen (1R) sind. - Fluggerät (100) nach einem der vorhergehenden Ansprüche, dazu ausgelegt, dass im Schwebeflug die zugeordneten Drehachsen parallel ausgerichtet sind.
- Fluggerät (200) umfassend- einen Fluggeräterumpf (220), und- mindestens drei Antriebsvorrichtungen (1A, 1B), die um den Fluggeräterumpf herum im Wesentlichen in einer Ebene gelagert sind, und die um eine jeweils zugeordnete Drehachse (5A, 5B) drehbar sind, um einen jeweils zugehörigen Schubvektor (2001, 2002, 2003, 2004) zu erzeugen;
wobei das Fluggerät (200) dazu ausgelegt ist, einen Schwebeflug durchzuführen, bei dem sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts (250) des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, dadurch, dass im Schwebeflug- die zugeordneten Drehachsen (5A) von zwei der mindestens drei Antriebsvorrichtungen (1A) im Wesentlichen in eine erste Richtung (201) ausgerichtet sind, und die zugeordnete Drehachse (5B) von einer weiteren der mindestens drei Antriebsvorrichtungen (1B) im Wesentlichen in eine zweite Richtung (202) ausgerichtet ist, wobei- die erste Richtung (201) nicht parallel zur zweiten Richtung (202) ist,- die erste Richtung (201) und die zweite Richtung (202) in der Ebene liegen,und- jede der zwei Antriebsvorrichtungen (1A) mit im Schwebeflug in die erste Richtung (201) ausgerichteten Drehachsen (5A) im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse (5A) dreht. - Fluggerät (200) nach Anspruch 5, umfassend- mindestens vier Antriebsvorrichtungen (1A, 1B), die um den Fluggeräterumpf herum gelagert sind, und die um eine jeweils zugeordnete Drehachse (5A, 5B) drehbar sind, um einen jeweils zugehörigen Schubvektor (2001, 2002, 2003, 2004) zu erzeugen;
wobei das Fluggerät (200) dazu ausgelegt ist, den Schwebeflug durchzuführen, dadurch, dass im Schwebeflug- die zugeordneten Drehachsen (5A) von zwei der mindestens vier Antriebsvorrichtungen (1A) im Wesentlichen in die erste Richtung (201) ausgerichtet sind, und die zugeordneten Drehachsen (5B) von zwei weiteren der mindestens vier Antriebsvorrichtungen (1B) im Wesentlichen in die zweite Richtung (202) ausgerichtet sind, wobei- jede der zwei Antriebsvorrichtungen (1A) mit im Schwebeflug in die erste Richtung (201) ausgerichteten Drehachsen (5A) im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse (5A) dreht, und/oder jede der zwei Antriebsvorrichtungen (5B) mit im Schwebeflug in die zweite Richtung (202) ausgerichteten Drehachsen (5B) im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse (5B) dreht. - Fluggerät (200) nach Anspruch 5, wobei drei Antriebsvorrichtungen derart um den Fluggeräterumpf herum angeordnet sind, dass sie die Ecken eines gleichseitigen Dreiecks bilden, wobei- sich der Fluggeräterumpf (220) im geometrischen Zentrum des Dreiecks befindet,- die erste Richtung durch eine Gerade definiert wird, auf der zwei der drei Antriebsvorrichtungen liegen,- die zweite Richtung im Wesentlichen senkrecht auf der ersten Richtung steht, und- die Drehachse einer jeden der zwei auf der in die erste Richtung zeigenden Geraden liegenden Antriebsvorrichtungen mit der Geraden einen Winkel einschließt, der im Bereich zwischen 0° und 30° liegt.
- Fluggerät (200) nach Anspruch 6, wobei n Antriebsvorrichtungen derart um den Fluggeräterumpf herum angeordnet sind, dass sie die Ecken eines regelmäßigen n-Ecks, n > 3, bilden, wobei- sich der Fluggeräterumpf (220) im geometrischen Zentrum des n-Ecks befindet,- die erste Richtung durch eine erste Gerade definiert wird, auf der zwei der n Antriebsvorrichtungen liegen,- die zweite Richtung durch eine zweite Gerade definiert wird, auf der zwei weitere der n Antriebsvorrichtungen liegen,- die Drehachse einer jeden der zwei auf der in die erste Richtung zeigenden ersten Geraden liegenden Antriebsvorrichtungen mit der ersten Geraden einen Winkel einschließt, der im Bereich zwischen 0° und 18° liegt.
- Fluggerät (200) nach Anspruch 8, wobei der Winkel zwischen der ersten Geraden und der zweiten Geraden im Bereich zwischen 72° und 90° liegt.
- Fluggerät (200) nach einem der Ansprüche 6 bis 9, wobei- die zweite Richtung (202) im Wesentlichen senkrecht zur ersten Richtung (201) steht, und- zwei der mindestens vier Antriebsvorrichtungen (1A) entlang der ersten Richtung (201) angeordnet sind, und die zwei weiteren der mindestens vier Antriebsvorrichtungen (1B) entlang der im Wesentlichen senkrecht zur ersten Richtung stehenden zweiten Richtung (202) angeordnet sind.
- Fluggerät (200) nach Anspruch 10, wobeider Massenschwerpunkt (250) des Fluggeräts, wenn es den Schwebeflug ausführt, in der ersten Richtung (201) in einem Abstand l34 von einer Geraden, entlang der die Antriebsvorrichtungen (1B) in der zweiten Richtung (202) angeordnet sind, positioniert ist, wobei


 worinRmin ein minimales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (2001, 2002) entsprechenden Schubkräften der entlang der ersten Richtung angeordneten Antriebsvorrichtungen (1A),Rmax ein maximales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (2001, 2002) entsprechenden Schubkräften der entlang der ersten Richtung angeordneten Antriebsvorrichtungen (1A),a 34 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die entlang der zweiten Richtung (202) angeordneten Antriebsvorrichtungen (1B), undl der Abstand der geometrischen Zentren der in der ersten Richtung angeordneten Antriebsvorrichtungen (1A) sind;und/oderder Massenschwerpunkt (250) des Fluggeräts, wenn es den Schwebeflug ausführt, in der zweiten Richtung (202) in einem Abstand l12 von einer Geraden, entlang der die Antriebsvorrichtungen (1A) in der ersten Richtung (201) angeordnet sind, positioniert ist, wobei
worinRmin ein minimales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (2001, 2002) entsprechenden Schubkräften der entlang der ersten Richtung angeordneten Antriebsvorrichtungen (1A),Rmax ein maximales Verhältnis zwischen den zulässigen Werten der den Schubvektoren (2001, 2002) entsprechenden Schubkräften der entlang der ersten Richtung angeordneten Antriebsvorrichtungen (1A),a 34 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die entlang der zweiten Richtung (202) angeordneten Antriebsvorrichtungen (1B), undl der Abstand der geometrischen Zentren der in der ersten Richtung angeordneten Antriebsvorrichtungen (1A) sind;und/oderder Massenschwerpunkt (250) des Fluggeräts, wenn es den Schwebeflug ausführt, in der zweiten Richtung (202) in einem Abstand l12 von einer Geraden, entlang der die Antriebsvorrichtungen (1A) in der ersten Richtung (201) angeordnet sind, positioniert ist, wobei mit
mit
 worin
worin
 a 12 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die entlang der ersten Richtung (201) angeordneten Antriebsvorrichtungen (1A), undl' der Abstand der geometrischen Zentren der in der zweiten Richtung angeordneten Antriebsvorrichtungen (1B) sind.
a 12 eine die Drehmomente und Schubvektoren verknüpfende Kennzahl für die entlang der ersten Richtung (201) angeordneten Antriebsvorrichtungen (1A), undl' der Abstand der geometrischen Zentren der in der zweiten Richtung angeordneten Antriebsvorrichtungen (1B) sind. - Fluggerät (100, 200) nach einem der vorhergehenden Ansprüche, weiter dazu ausgelegt, dass im Schwebeflug der Massenschwerpunkt (150, 250) des Fluggeräts derart positioniert ist, dass dadurch bewirkt wird, dass sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn eine oder mehrere der Antriebsvorrichtungen einen jeweils ihnen zugeordneten bestimmten vorgegebenen Schubvektor erzeugen.
- Fluggerät (100, 200) nach einem der vorhergehenden Ansprüche, wobei das Fluggerät weiter dazu ausgelegt ist, bei annähernd gleichen zugeordneten bestimmten vorgegebenen Schubvektoren den Schwebeflug auszuführen.
- Fluggerät (100, 200) nach einem der vorhergehenden Ansprüche, das weiter eine Verlagerungsvorrichtung aufweist, mit der der Massenschwerpunkt (150, 250) des Fluggeräts verlagerbar ist.
- Fluggerät (100, 200) nach Anspruch 14, ferner umfassend einen Treibstofftank zur Versorgung der Antriebsvorrichtungen mit Treibstoff und/oder eine Batterie zur Versorgung der Antriebsvorrichtungen mit elektrischer Energie,
wobei die Verlagerungsvorrichtung dazu ausgelegt ist, Treibstoff aus dem Treibstofftank oder die Batterie innerhalb des Fluggeräts zu verlagern, um damit den Massenschwerpunkt (150, 250) so zu positionieren, dass das Fluggerät den Schwebeflug durchführt, wenn eine oder mehrere der Antriebsvorrichtungen den jeweils zugeordneten bestimmten vorgegebenen Schubvektor erzeugen. - Fluggerät (100, 200) nach einem der vorhergehenden Ansprüche, umfassend eine Schubvektorsteuerung, um die Schubvektoren der Antriebsvorrichtungen individuell zu steuern.
- Verfahren zur Steuerung eines Fluggeräts (100) mit- einem Fluggerätekörper (120), der eine Längsrichtung, eine Vertikalrichtung und eine Querrichtung definiert, wobei die Längsrichtung der Richtung vom Heck (122) zur Nase (121) des Fluggeräts entspricht, die Vertikalrichtung mit der Richtung der Erdanziehungskraft übereinstimmt, wenn das Fluggerät (100) am Boden ruht, und die Querrichtung senkrecht auf der Längsrichtung und der Vertikalrichtung steht, und- mindestens zwei Antriebsvorrichtungen (1, 1F, 1R), die um eine jeweils zugeordnete Drehachse (5) drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen, wobei
eine erste Anzahl der Antriebsvorrichtungen (1F) entlang einer ersten Geraden, die parallel zur Querrichtung (102) verläuft, angeordnet ist, und eine zweite Anzahl der Antriebsvorrichtungen (1R) entlang einer zweiten Geraden, die parallel zur Querrichtung (102) verläuft, angeordnet ist,die erste Gerade von der zweiten Geraden beabstandet ist, undder Massenschwerpunkt des Fluggeräts (100) bezüglich der Längsrichtung (101) zwischen der ersten Geraden und der zweiten Geraden positioniert ist;
umfassend die folgenden Schritte:- Bestimmen der zugehörigen Schubvektoren derart, dass das Fluggerät einen Schwebeflug durchführt, wenn jede der den mindestens zwei Antriebsvorrichtungen zugeordneten Drehachsen im Wesentlichen in Querrichtung des Fluggerätekörpers ausgerichtet ist, und jede der mindestens zwei Antriebsvorrichtungen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse dreht,
wobei im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts (150) des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden,- Antreiben jeder der Antriebsvorrichtungen (1F, 1R) im Wesentlichen in dieselbe Drehrichtung derart, dass die jeweilige Antriebsvorrichtungen den bestimmten zugehörigen Schubvektor erzeugt. - Verfahren zur Steuerung eines Fluggeräts (200) mit- einem Fluggeräterumpf (220), und- mindestens drei Antriebsvorrichtungen (1A, 1B), die um den Fluggeräterumpf herum im Wesentlichen in einer Ebene gelagert sind, und die um eine jeweils zugeordnete Drehachse (5A, 5B) drehbar sind, um einen jeweils zugehörigen Schubvektor zu erzeugen,
umfassend die folgenden Schritte:- Bestimmen der zugehörigen Schubvektoren derart, dass das Fluggerät einen Schwebeflug durchführt, wenn zwei der den mindestens drei Antriebsvorrichtungen (1A) zugeordneten Drehachsen (5A) im Wesentlichen in eine erste Richtung (201) ausgerichtet sind und im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse (5A) drehen, und/oder eine weitere der den mindestens drei Antriebsvorrichtungen (1B) zugeordneten Drehachsen (5B) im Wesentlichen in eine zweite Richtung (202), die nicht parallel zur ersten Richtung ist, ausgerichtet ist, wobei die erste Richtung (201) und die zweite Richtung (202) in der Ebene liegen,
wobei im Schwebeflug sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts (250) des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden,- Ausrichten der zugeordneten Drehachsen (5A) von zwei der mindestens drei Antriebsvorrichtungen (1A) im Wesentlichen in die erste Richtung (201), und Ausrichten der zugeordneten Drehachse (5B) der einen weiteren der mindestens drei Antriebsvorrichtungen (1B) im Wesentlichen in die zweite Richtung (202),- Antreiben jeder der Antriebsvorrichtungen (1A, 1B) derart, dass die jeweilige Antriebsvorrichtungen in eine zugeordnete Drehrichtung dreht und den bestimmten zugehörigen Schubvektor erzeugt,
wobei jede der zwei Antriebsvorrichtungen (1A) mit im Wesentlichen in die erste Richtung ausgerichteten Drehachsen im Wesentlichen in dieselbe Drehrichtung um die jeweils zugeordnete Drehachse (5A) dreht. - Verfahren zur Steuerung eines Fluggeräts (100, 200) gemäß Anspruch 17 oder 18, wobei sämtliche der bestimmten zugehörigen Schubvektoren annähernd identisch gewählt werden.
- Verfahren zur Steuerung eines Fluggeräts (100, 200) gemäß einem der Ansprüche 17 bis 19, weiter den folgenden Schritt umfassend:- Positionieren des Massenschwerpunkts (150, 250) des Fluggeräts derart, dass dadurch bewirkt wird, dass sämtliche auf das Fluggerät wirkenden Kräfte und sämtliche bezüglich des Massenschwerpunkts des Fluggeräts am Fluggerät angreifenden Drehmomente im Wesentlichen verschwinden, wenn die Antriebsvorrichtungen die jeweils ihnen zugeordneten bestimmten vorgegebenen Schubvektor erzeugen.
- Fluggerät (100, 200) oder Verfahren nach einem der vorhergehenden Ansprüche, wobei jede der Antriebsvorrichtungen (1, 1F, 1R, 1A, 1B) konstruktiv identisch ausgestaltet ist.
- Fluggerät (100, 200) oder Verfahren nach einem der vorhergehenden Ansprüche, wobei die Antriebsvorrichtungen (1, 1F, 1R, 1A, 1B) Cyclogyro-Rotoren umfassen.
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21175290.2A EP4091939B1 (de) | 2021-05-21 | 2021-05-21 | Fluggerät |
| US18/514,505 US20250121937A1 (en) | 2021-05-21 | 2022-05-23 | Aircraft |
| KR1020237043174A KR20240007680A (ko) | 2021-05-21 | 2022-05-23 | 항공기 |
| PH1/2023/553125A PH12023553125A1 (en) | 2021-05-21 | 2022-05-23 | Aircraft |
| CA3220601A CA3220601A1 (en) | 2021-05-21 | 2022-05-23 | Aircraft |
| BR112023023953A BR112023023953A2 (pt) | 2021-05-21 | 2022-05-23 | Aeronave, método de fabricação de uma aeronave, e, método para controle de uma aeronave |
| PCT/EP2022/063841 WO2022243559A1 (de) | 2021-05-21 | 2022-05-23 | Fluggerät |
| CN202280035810.3A CN117355463A (zh) | 2021-05-21 | 2022-05-23 | 飞行器 |
| MX2023013569A MX2023013569A (es) | 2021-05-21 | 2022-05-23 | Aeronave. |
| JP2023570206A JP2024517960A (ja) | 2021-05-21 | 2022-05-23 | 航空機 |
| JP2025124343A JP2025160330A (ja) | 2021-05-21 | 2025-07-24 | 航空機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21175290.2A EP4091939B1 (de) | 2021-05-21 | 2021-05-21 | Fluggerät |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP4091939A1 EP4091939A1 (de) | 2022-11-23 |
| EP4091939B1 true EP4091939B1 (de) | 2025-01-22 |
| EP4091939C0 EP4091939C0 (de) | 2025-01-22 |
Family
ID=76059751
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21175290.2A Active EP4091939B1 (de) | 2021-05-21 | 2021-05-21 | Fluggerät |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US20250121937A1 (de) |
| EP (1) | EP4091939B1 (de) |
| JP (2) | JP2024517960A (de) |
| KR (1) | KR20240007680A (de) |
| CN (1) | CN117355463A (de) |
| BR (1) | BR112023023953A2 (de) |
| CA (1) | CA3220601A1 (de) |
| MX (1) | MX2023013569A (de) |
| PH (1) | PH12023553125A1 (de) |
| WO (1) | WO2022243559A1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3162198A1 (fr) | 2024-05-17 | 2025-11-21 | Franck Guigan | Dispositif de propulsion à géométrie variable |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1754977A (en) * | 1925-07-13 | 1930-04-15 | Axel G Bergman | Vertical-rising airplane |
| US7654486B2 (en) * | 2002-09-11 | 2010-02-02 | Milde Jr Karl F | VTOL personal aircraft |
| KR100810725B1 (ko) * | 2006-12-11 | 2008-03-07 | 재단법인서울대학교산학협력재단 | 수직 이착륙 비행체 |
| US9346535B1 (en) * | 2012-04-05 | 2016-05-24 | The United States Of America As Represented By The Secretary Of The Air Force | Ring cam and ring cam assembly for dynamically controlling pitch of cycloidal rotor blades |
| AT518116B1 (de) * | 2015-12-30 | 2019-05-15 | Cyclotech Gmbh | Fluggerät |
| ITUA20161595A1 (it) * | 2016-03-15 | 2017-09-15 | Navis S R L | Velivolo a decollo verticale con ali girevoli e motori elettrici |
| US10377480B2 (en) * | 2016-08-10 | 2019-08-13 | Bell Helicopter Textron Inc. | Apparatus and method for directing thrust from tilting cross-flow fan wings on an aircraft |
| US10293931B2 (en) * | 2016-08-31 | 2019-05-21 | Bell Helicopter Textron Inc. | Aircraft generating a triaxial dynamic thrust matrix |
| US11591084B2 (en) * | 2017-01-03 | 2023-02-28 | The Texas A&M University System | Cycloidal rotor micro-air vehicle |
| CN106828886A (zh) * | 2017-01-16 | 2017-06-13 | 北京猎鹰无人机科技有限公司 | 一种飞行器重心动态配平装置 |
| EP3354566B1 (de) * | 2017-01-26 | 2019-07-03 | AIRBUS HELICOPTERS DEUTSCHLAND GmbH | Schubantriebeinheit mit zwei rotoren und eine verkleidung |
| US10384776B2 (en) * | 2017-02-22 | 2019-08-20 | Bell Helicopter Textron Inc. | Tiltrotor aircraft having vertical lift and hover augmentation |
| US10814967B2 (en) * | 2017-08-28 | 2020-10-27 | Textron Innovations Inc. | Cargo transportation system having perimeter propulsion |
| DE102017011890B4 (de) | 2017-12-14 | 2023-02-09 | Cyclotech Gmbh | Antriebsvorrichtung für ein Fluggerät |
| EP3594113B1 (de) * | 2018-07-10 | 2021-06-09 | AIRBUS HELICOPTERS DEUTSCHLAND GmbH | Vorrichtung zum einstellen des schwerpunkts eines vertikal startenden und landenden flugzeugs |
| JP6461451B1 (ja) * | 2018-08-03 | 2019-01-30 | 楽天株式会社 | 飛行体の保護部材 |
| US11136119B2 (en) * | 2018-09-17 | 2021-10-05 | Amazon Technologies, Inc. | Six degree of freedom aerial vehicle having reconfigurable motors |
| US11104432B2 (en) * | 2018-10-09 | 2021-08-31 | Stefano Rivellini | Bent tube ducted fan drone |
| EP3990345B1 (de) * | 2019-06-25 | 2023-11-22 | Universidade Da Beira Interior | Flugtriebwerk mit rotierenden und stationären vorrichtungen |
| CN211642580U (zh) * | 2020-01-13 | 2020-10-09 | 成都航空职业技术学院 | 四轴扇翼无人机 |
| US11535366B2 (en) * | 2020-03-25 | 2022-12-27 | Aurora Flight Sciences Corporation, a subsidiary of The Boeing Company | Shifting a center of gravity of an aircraft |
-
2021
- 2021-05-21 EP EP21175290.2A patent/EP4091939B1/de active Active
-
2022
- 2022-05-23 CN CN202280035810.3A patent/CN117355463A/zh active Pending
- 2022-05-23 KR KR1020237043174A patent/KR20240007680A/ko active Pending
- 2022-05-23 JP JP2023570206A patent/JP2024517960A/ja active Pending
- 2022-05-23 PH PH1/2023/553125A patent/PH12023553125A1/en unknown
- 2022-05-23 US US18/514,505 patent/US20250121937A1/en active Pending
- 2022-05-23 BR BR112023023953A patent/BR112023023953A2/pt unknown
- 2022-05-23 WO PCT/EP2022/063841 patent/WO2022243559A1/de not_active Ceased
- 2022-05-23 CA CA3220601A patent/CA3220601A1/en active Pending
- 2022-05-23 MX MX2023013569A patent/MX2023013569A/es unknown
-
2025
- 2025-07-24 JP JP2025124343A patent/JP2025160330A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| MX2023013569A (es) | 2023-11-29 |
| KR20240007680A (ko) | 2024-01-16 |
| CN117355463A (zh) | 2024-01-05 |
| BR112023023953A2 (pt) | 2024-01-30 |
| JP2025160330A (ja) | 2025-10-22 |
| US20250121937A1 (en) | 2025-04-17 |
| EP4091939C0 (de) | 2025-01-22 |
| WO2022243559A1 (de) | 2022-11-24 |
| EP4091939A1 (de) | 2022-11-23 |
| JP2024517960A (ja) | 2024-04-23 |
| CA3220601A1 (en) | 2022-11-24 |
| PH12023553125A1 (en) | 2024-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2817219B1 (de) | Fluggerät | |
| DE102012202698B4 (de) | Fluggerät | |
| AT518116B1 (de) | Fluggerät | |
| DE102012104783B4 (de) | Fluggerät, bevorzugt UAV, Drohne und/oder UAS | |
| EP3715249B1 (de) | Antriebsvorrichtung für ein fluggerät | |
| DE102005046155B4 (de) | Hubschrauber mit koaxialen Hauptrotoren | |
| EP3176084A1 (de) | Verfahren zur verbesserung der flugeigenschaften eines multikopters in ausfallsituationen und multikopter mit verbesserten flugeigenschaften in ausfallsituationen | |
| DE2922059A1 (de) | Verbundflugzeug | |
| EP2883792A1 (de) | Flugzeugkonfiguration | |
| EP0553490A1 (de) | Fluggerät | |
| WO2017021391A1 (de) | Vtol-luftfahrzeug mit bewegbarer masse zur steuerung | |
| EP4091939B1 (de) | Fluggerät | |
| DE102012002310A1 (de) | Flugzeug mit mindestens zwei Flugzeugrümpfen und einer ersten Tragflügelanordnung mit mindestens zwei nicht verbundenen Tragflügelabschnitten | |
| DE102016001771A1 (de) | Kippflügel-Wandelflugzeug | |
| DE112020004732T5 (de) | Elektroflugzeug und Lageregelungsverfahren dafür | |
| DE102012023821A1 (de) | Flugzeug mit mindestens zwei Flugzeugrümpfen und zwei Hauptflügeln | |
| DE102022114599B4 (de) | Fluggerät | |
| DE102017128164B4 (de) | Flugzeug | |
| EP4408740A1 (de) | Elektrisch angetriebenes fluggerät | |
| DE102020007836A1 (de) | Fluggerät mit Flügeln und Betriebsverfahren | |
| DE102024100372A1 (de) | Flugzeug mit einem Höhenleitwerk an den Enden der Flügel | |
| WO2021004677A1 (de) | Vertikal start- und landfähiges flugobjekt | |
| DE102022132702B4 (de) | Flugzeug mit einem Drehflügel und mit einem um eine Querachse verkippbaren Propeller | |
| DE102018133096A1 (de) | Fluggerät | |
| DE60026394T2 (de) | Kipprotorflugzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20220615 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20230419 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240910 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502021006462 Country of ref document: DE |
|
| U01 | Request for unitary effect filed |
Effective date: 20250212 |
|
| U07 | Unitary effect registered |
Designated state(s): AT BE BG DE DK EE FI FR IT LT LU LV MT NL PT RO SE SI Effective date: 20250218 |
|
| U20 | Renewal fee for the european patent with unitary effect paid |
Year of fee payment: 5 Effective date: 20250318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250422 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250122 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250522 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250422 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250522 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250423 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250122 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |