EP3839256A1 - Verfahren zum betreiben einer drehzahlvariablen verstellpumpe - Google Patents
Verfahren zum betreiben einer drehzahlvariablen verstellpumpe Download PDFInfo
- Publication number
- EP3839256A1 EP3839256A1 EP20213692.5A EP20213692A EP3839256A1 EP 3839256 A1 EP3839256 A1 EP 3839256A1 EP 20213692 A EP20213692 A EP 20213692A EP 3839256 A1 EP3839256 A1 EP 3839256A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- speed
- setpoint
- soll
- variable
- volume per
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 23
- 238000006073 displacement reaction Methods 0.000 claims abstract description 75
- 230000008859 change Effects 0.000 claims abstract description 15
- 230000007246 mechanism Effects 0.000 claims abstract description 13
- 230000001105 regulatory effect Effects 0.000 claims abstract description 13
- 230000006978 adaptation Effects 0.000 claims description 8
- 238000004590 computer program Methods 0.000 claims description 5
- 238000005457 optimization Methods 0.000 claims description 3
- 230000033228 biological regulation Effects 0.000 claims description 2
- 230000006399 behavior Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 4
- 239000000654 additive Substances 0.000 description 3
- 230000000996 additive effect Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000015654 memory Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/26—Control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/26—Control
- F04B1/30—Control of machines or pumps with rotary cylinder blocks
- F04B1/32—Control of machines or pumps with rotary cylinder blocks by varying the relative positions of a swash plate and a cylinder block
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B1/00—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders
- F04B1/12—Multi-cylinder machines or pumps characterised by number or arrangement of cylinders having cylinder axes coaxial with, or parallel or inclined to, main shaft axis
- F04B1/26—Control
- F04B1/30—Control of machines or pumps with rotary cylinder blocks
- F04B1/32—Control of machines or pumps with rotary cylinder blocks by varying the relative positions of a swash plate and a cylinder block
- F04B1/324—Control of machines or pumps with rotary cylinder blocks by varying the relative positions of a swash plate and a cylinder block by changing the inclination of the swash plate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/20—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00 by changing the driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/04—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed
- F15B11/042—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed by means in the feed line, i.e. "meter in"
- F15B11/0423—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed by means in the feed line, i.e. "meter in" by controlling pump output or bypass, other than to maintain constant speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0209—Rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20515—Electric motor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20561—Type of pump reversible
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/27—Directional control by means of the pressure source
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6309—Electronic controllers using input signals representing a pressure the pressure being a pressure source supply pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/633—Electronic controllers using input signals representing a state of the prime mover, e.g. torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6333—Electronic controllers using input signals representing a state of the pressure source, e.g. swash plate angle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6651—Control of the prime mover, e.g. control of the output torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6652—Control of the pressure source, e.g. control of the swash plate angle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6653—Pressure control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6654—Flow rate control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6656—Closed loop control, i.e. control using feedback
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/765—Control of position or angle of the output member
- F15B2211/7656—Control of position or angle of the output member with continuous position control
Definitions
- the present invention relates to a method for operating a variable-speed variable displacement pump, in which a conveyor mechanism which is adjustable in a displacement volume per work cycle is driven by means of a variable-speed drive, as well as an electrohydraulic system.
- the pumps on which the invention is based have a conveyor mechanism with a variable displacement volume per work cycle (so-called hydraulic displacement machine, e.g. axial piston machine), which is driven by means of a drive with variable speed.
- hydraulic displacement machine e.g. axial piston machine
- the volume flow and / or the delivery pressure are usually regulated by adjusting the displacement volume of the conveyor and the speed accordingly, i.e. such pumps have two degrees of freedom in regulation.
- variable-speed variable displacement pump such as, in particular, an axial piston pump with e.g. two-point adjustment or proportional adjustment
- a conveying mechanism that can be adjusted in a displacement volume per work cycle is driven by means of a variable-speed drive such as an electric motor.
- a so-called swivel disk for example, can be provided in such a variable displacement pump to adjust the conveyor system.
- At least one variable such as a pressure
- a desired value the at least one variable
- the at least one variable is usually converted to a desired value (the at least one variable) by specifying a speed setpoint for a speed of the drive and a setpoint for a parameter that determines the displacement volume per work cycle ) regulated.
- the at least one variable is preferably selected from a pressure and / or a volume flow of a medium such as oil, with which the variable displacement pump is operated (or which is used as the operating medium), a force that is generated directly or indirectly by the medium, and a position of an element that is moved directly or indirectly through the medium.
- force and position can relate not only to the system with the variable displacement pump and drive, but also to a higher-level system in which the variable displacement pump is used with the drive, e.g. an electro-hydraulic axis or an electro-hydraulic system in general.
- the parameter determining the displacement volume per work cycle can be a swivel angle - e.g. in the case of the aforementioned axial piston pump with swivel plate.
- an adjustment of the swivel angle causes a change in the stroke of the individual pistons in the conveying mechanism of the pump and thus in the displacement volume per work cycle by changing the angle of attack of the swivel plate.
- variable displacement pump with a specific, in particular small, displacement volume per work cycle is appropriate and, in particular, energy-efficient. This is based on the fact that - at least at constant pressure - the required torque decreases. If, during operation, the need for a change or adaptation of the displacement volume per work cycle is recognized and initiated - via the corresponding parameter such as the swivel angle - then readjustment of the Speed necessary to - as often desired - to keep the (higher-level) at least one variable to be controlled, such as the pressure (as much as possible) constant.
- the speed setpoint (and preferably also a torque setpoint) when the setpoint for the parameter determining the displacement volume per work cycle is changed by means of a precontrol depending on a dynamic or speed of an adjustment of the conveyor, in particular depending on the operating point.
- This precontrol of the speed setpoint which takes place in particular parallel to the change or adaptation of the displacement volume per work cycle, can prevent readjustment of the speed and thus also a possible drop in pressure.
- the (higher-level) controller does not have to intervene at all, rather the relevant at least one variable remains constant. This is particularly effective when a change or adaptation of the speed of the drive takes place or can take place faster than a change or adaptation of the displacement volume per work cycle.
- the specification of the speed setpoint and / or the adaptation of the speed setpoint and / or the specification of the setpoint for the parameter determining the displacement volume per work cycle is preferably carried out using a model in which the speed of the adjustment of the conveyor system is taken into account, and particularly preferably using a model predictive control (with such a model).
- a model predictive control (MPC) enables a particularly simple and precise and thus also efficient control, in particular because the non-linear behavior of the electrohydraulic system present here with variable displacement pump and drive can be mapped particularly well.
- the model predictive control is a control concept that is already used in industry. A very high control quality is achieved by predicting the future system behavior in each sampling step, i.e. a specific time interval. In contrast to classic control concepts, input, output and status restrictions can be explicitly taken into account. The effect of changing the controller parameters on the system behavior is mostly very intuitive. To implement the computationally expensive control concept for fast mechatronic systems, approaches such as move blocking to reduce the optimization parameters on the prediction horizon, or other approaches such as explicit model predictive control can be used.
- the speed of the adjustment of the conveyor is preferably taken into account using at least one of the following parameters: a maximum possible displacement volume per work cycle, a minimum possible displacement volume per work cycle, a pressure of a medium with which the variable displacement pump is operated, an actual value of the Speed of the drive, a viscosity of the medium, and mechanical and / or electrical parameters of an adjustment system of the variable displacement pump.
- the maximum and the minimum possible displacement volume per work cycle can also be taken into account as a quotient.
- the speed of the adjustment of the conveyor mechanism is preferably taken into account as a modeled actual value for the parameter determining the displacement volume per work cycle.
- a speed correction value can be derived from this modeled actual value (e.g. an additive speed value) can be determined to adapt the speed setpoint.
- the speed setpoint is further adapted as a function of at least one optimization criterion, which is selected in particular from: a noise generated by the variable displacement pump, an efficiency of the variable displacement pump, and a utilization of the drive. This allows operation to be further optimized, especially when the pump is operated under partial load.
- variable displacement pump or the swivel plate
- system parameters, other component parameters and / or current states of the (electrohydraulic) are expediently dependent on the swivel direction (i.e. in the direction of a higher or lower displacement volume)
- System determines a target trajectory for the speed and the necessary change torque.
- the changing hydraulic torque e.g. depending on the current pressure and a model of the change in the delivery volume of the pump, is directly pre-controlled.
- a torque setpoint for the drive when the setpoint for the parameter determining the displacement volume per work cycle changes, by way of precontrol as a function of the dynamics or speed of an adjustment of the conveyor, in particular also as a function of the operating point is adjusted.
- a product of the modeled actual value for the parameter determining the displacement volume per work cycle and the actual pressure can flow in, i.e. in particular a modeled value for a hydraulic torque is pre-controlled.
- the points shown above then also apply to the torque precontrol.
- the precontrol of a torque value is particularly advantageous if a torque controller is subordinate to the speed controller when an electric drive is operated.
- a computing unit for example a control and / or regulating unit for a variable-speed variable displacement pump with a variable-speed drive, is set up, in particular in terms of programming, to carry out a method according to the invention.
- the invention also relates to an electrohydraulic drive system, such as an electrohydraulic axle, comprising a variable-speed variable displacement pump with a variable-speed drive and a computing unit according to the invention.
- Suitable data carriers for providing the computer program are, in particular, magnetic, optical and electrical memories, such as hard drives, flash memories, EEPROMs, DVDs, etc.
- a program can also be downloaded via computer networks (Internet, intranet, etc.).
- an electrohydraulic system 100 as the invention may be based, is shown schematically.
- the electrohydraulic system 100 has an actuator designed as a hydraulic cylinder 110 with a piston 111 movable along an x-axis, which actuator is actuated by a variable-speed variable displacement pump 120.
- a hydraulic circuit 130 with, for example, oil as the medium or operating medium is arranged between the variable-speed variable displacement pump 120 and the hydraulic cylinder 110.
- the variable-speed variable displacement pump 120 has a variable-speed drive in the form of an electric motor 121 and a conveyor mechanism 122 and is in particular in the form of an axial piston pump with a swash plate design.
- a variable-speed drive in the form of an electric motor 121 and a conveyor mechanism 122 and is in particular in the form of an axial piston pump with a swash plate design.
- a control and / or regulating unit 140 is programmed to carry out a preferred embodiment of a method according to the invention and specifies a speed setpoint n soll and a swivel angle setpoint ⁇ soll as a setpoint for the parameter determining the displacement volume per work cycle.
- n ist and ⁇ ist are provided in each case. This can be done using conventional sensors, for example.
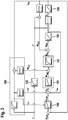
- a control loop according to a preferred embodiment of the invention or a method according to the invention is shown, as it can be implemented in a program in a control and / or regulating unit.
- a pressure p in a hydraulic circuit 130 such as that described in Figure 1 is shown, regulated to a target value p set.
- a speed setpoint to or 'to n (the difference between these target values are discussed later) to ⁇ 121 and a target value for a speed of the drive for a swivel angle than the the parameter determining the displacement volume per work cycle is determined or specified.
- These setpoint values for speed and swivel angle are then implemented accordingly in drive 121 or in conveyor mechanism 122.
- Drive 121 and swivel angle adjustment of the conveyor system 122 usually react to the setpoint specifications in accordance with a PT1 behavior with corresponding time constants T1 or T2.
- the controller 150 when the swivel angle or generally the displacement volume per cycle of the conveying mechanism, for example, is to be changed for reasons of efficiency, it is at the same time or in parallel, the first established by the controller 150 and predetermined speed reference value n 'to a function of a current speed 165 of an adjustment of the conveyor system and adjusted by means of a feedforward control so that the (adjusted) speed setpoint n setpoint is obtained, which is then used further.
- This takes place in particular within the framework of a model predictive control 160 with a corresponding model (often also referred to as “DigitalTwin”) for the variable displacement pump.
- a ratio or quotient of the maximum possible to the minimum possible swivel angle can be included in the determination of the adjusted speed setpoint, which in turn can depend on a current swivel angle, which here - through the model - is taken into account as an estimated value or calculated value ⁇ * is.
- an electronic swivel angle adjustment can be provided in which a magnetic force is generated by means of electricity, which counteracts a (mechanical) spring force in an adjusting cylinder.
- the rotational speed is adjusted at the same time as the swivel angle and there is no change in the pressure in the hydraulic circuit 130, so that no intervention by the (higher-level) controller 150 is necessary.
- the position x of the element or piston 111 according to, for example, is also the (superordinate) variable to be regulated Figure 1 can be used.
- FIG 3 a control loop according to a further preferred embodiment of the invention or a method according to the invention is shown, as it can be implemented in terms of programming in a control and / or regulating unit.
- a pressure p act is again exemplified in a hydraulic circuit 130, as it is, for example, in FIG Figure 1 is shown, regulated to a target value p set.
- a speed setpoint to n as a manipulated variable of a here likewise designed as a PI controller 150 controller.
- n from the speed command value is determined in consideration of a correction or pilot Terms .DELTA.n * (this will be discussed in), a speed error e n n by subtracting the actual speed is calculated and a speed controller 151 (implemented here as well as a PI controller) supplied to the outputs a setpoint torque M soll and acts on drive 121, which is again modeled with a PT1 behavior. This then results in an electrical drive torque M A of the pump 120.
- a swivel angle ⁇ is also specified as the parameter determining the displacement volume per work cycle for the conveyor mechanism 122, the swivel angle adjustment of which is again modeled with a PT1 behavior, from which the swivel angle (or a corresponding volume variable) ⁇ * results.
- an effective torque M eff of the pump 120 results, which acts on the speed.
- the hydraulic torque M hyd results, as above, as the product of the volume variable ⁇ * and the actual pressure, which can be weighted or increased if necessary via a P element.
- N is the product of the speed and the volume size ⁇ * results in a volume flow rate Q, which can be optionally weighted by a P-element or amplified, and then in the hydraulic circuit 130, taking into account compression factor and volume of the medium that is compressed , the corresponding actual pressure pist.
- the first established by the controller 150 and predetermined speed reference value is n parallel adjusted by way of a precontrol with the correction or precontrol term ⁇ n *.
- the pre-control term ⁇ n * is determined in particular in the context of a model predictive control 160 with a corresponding model (often also referred to as "DigitalTwin") for the variable displacement pump (whose swivel angle reaction to the swivel angle specification ⁇ is modeled with a PT1 behavior within block 160).
- the resultant modeled actual pivoting angle via a P-member is guided to the weighting or gain and is intended as an additive * n speed value .DELTA.n on the speed reference value, is applied.
- the modeled is actual swivel angle (or volume) multiplied performed with the actual pressure over a P-element and as an additive torque value M * hyd on the torque command value M should be switched on.
Abstract
Description
- Die vorliegende Erfindung betrifft ein Verfahren zum Betreiben einer drehzahlvariablen Verstellpumpe, bei der ein in einem Verdrängervolumen je Arbeitsspiel verstellbares Förderwerk mittels eines drehzahlvariablen Antriebs angetrieben wird, sowie ein elektrohydraulisches System.
- Der Erfindung zugrunde liegende Pumpen weisen ein Förderwerk mit variablem Verdrängervolumen pro Arbeitsspiel (sog. hydraulische Verdrängermaschine, z.B. Axialkolbenmaschine) auf, welches mittels eines Antriebs mit variabler Drehzahl angetrieben wird. Beim Betrieb solcher Pumpen werden üblicherweise der Volumenstrom und/oder der Förderdruck (d.h. Druckdifferenz zwischen Zulauf und Ablauf) durch entsprechende Anpassung des Verdrängervolumens des Förderwerks und der Drehzahl geregelt, d.h. solche Pumpen besitzen zwei Freiheitsgrade bei der Regelung.
- Aus der
EP 2 192 309 B1 ist beispielsweise ein Verfahren bekannt, bei dem eine solche Pumpe betrieben wird, indem ein Druck bzw. eine Druckmittelmenge durch Ansteuern der Volumeneinstellung der Pumpe geregelt wird. Dabei wird eine Drehzahlabweichung des Antriebs berücksichtigt. - Erfindungsgemäß werden ein Verfahren und ein elektrohydraulisches System mit den Merkmalen der unabhängigen Patentansprüche vorgeschlagen. Vorteilhafte Ausgestaltungen sind Gegenstand der Unteransprüche sowie der nachfolgenden Beschreibung.
- Die Erfindung beschäftigt sich mit dem Betreiben einer drehzahlvariablen Verstellpumpe wie insbesondere einer Axialkolbenpumpe mit z.B. Zweipunktverstellung oder Proportionalverstellung, bei der ein in einem Verdrängervolumen je Arbeitsspiel verstellbares Förderwerk mittels eines drehzahlvariablen Antriebs wie z.B. eines Elektromotors angetrieben wird. Zur Verstellung des Förderwerks kann bei einer solchen Verstellpumpe z.B. eine sog. Schwenkscheibe vorgesehen sein.
- Beim Betrieb einer solchen Verstellpumpe wird in aller Regel im Rahmen einer Regelung wenigstens eine Größe, wie z.B. ein Druck, durch Vorgabe eines Drehzahlsollwerts für eine Drehzahl des Antriebs und eines Sollwerts für eine das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße auf einen Sollwert (der wenigstens einen Größe) geregelt.
- Bevorzugt ist die wenigstens eine Größe ausgewählt aus einem Druck und/oder einem Volumenstrom eines Mediums wie z.B. Öl, mit dem die Verstellpumpe betrieben wird (bzw. das als Betriebsmedium verwendet wird), einer Kraft, die direkt oder indirekt durch das Medium erzeugt wird, und einer Position eines Elements, das direkt oder indirekt durch das Medium bewegt wird. Insbesondere Kraft und Position können sich nicht nur auf das System mit Verstellpumpe und Antrieb, sondern auch auf ein übergeordnetes System beziehen, in dem die Verstellpumpe mit dem Antrieb verwendet wird, z.B. eine elektrohydraulische Achse oder allgemein ein elektrohydraulisches System.
- Bei der das Verdrängervolumen je Arbeitsspiel bestimmenden Kenngröße kann es sich - z.B. im Falle der erwähnten Axialkolbenpumpe mit Schwenkscheibe - um einen Schwenkwinkel handeln. Eine Verstellung des Schwenkwinkels bewirkt in diesem Beispiel durch eine Veränderung des Anstellwinkels der Schwenkscheibe eine Änderung des Hubs der einzelnen Kolben im Förderwerk der Pumpe und damit des Verdrängervolumens je Arbeitsspiel.
- Es hat sich gezeigt, dass je nach Situation der Betrieb der Verstellpumpe mit einem bestimmten, insbesondere geringen, Verdrängervolumen je Arbeitsspiel zweckmäßig und insbesondere energieeffizient ist. Dies basiert darauf, dass - zumindest bei konstantem Druckdas nötige Drehmoment sinkt. Wird nun während des Betriebs der Bedarf nach einer Veränderung bzw. Anpassung des Verdrängervolumen je Arbeitsspiel - über die entsprechende Kenngröße wie den Schwenkwinkel - erkannt und veranlasst, so ist eine Nachregelung der Drehzahl nötig, um - wie oftmals erwünscht - die (übergeordnet) zu regelnde wenigstens eine Größe wie den Druck (möglichst) konstant zu halten.
- Es hat sich nun jedoch herausgestellt, dass eine solche Veränderung bzw. Anpassung des Verdrängervolumens je Arbeitsspiel Rückwirkungen auf die (übergeordnete) zu regelnde Größe bzw. deren Istwert hat, sodass hier eine Nachregelung dieser wenigstens eine Größe nötig wird bzw. der entsprechende Regler eingreifen muss. Dies liegt, wie erkannt wurde, darin begründet, dass die Drehzahldynamik des Antriebs meist nicht gut genug ist, um die Verstellung des Verdrängervolumens je Arbeitsspiel entsprechend schnell auszugleichen, was z.B. zu einem Druckeinbruch führen kann.
- Im Rahmen der Erfindung wird nun vorgeschlagen, dass der Drehzahlsollwert (und vorzugsweise auch ein Momentensollwert) bei einer Änderung des Sollwerts für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße im Wege einer Vorsteuerung in Abhängigkeit von einer Dynamik bzw. Geschwindigkeit einer Verstellung des Förderwerk, insbesondere auch arbeitspunktabhängig, angepasst wird. Durch diese insbesondere parallel zur Veränderung bzw. Anpassung des Verdrängervolumens je Arbeitsspiel erfolgende Vorsteuerung des Drehzahlsollwerts kann eine Nachregelung der Drehzahl und somit auch eine etwaiger Druckeinbruch verhindert werden. Der (übergeordnete) Regler muss also gar nicht eingreifen, vielmehr bleibt die betreffende wenigstens eine Größe konstant. Dies ist besonders effektiv, wenn eine Veränderung bzw. Anpassung der Drehzahl des Antriebs schneller erfolgt bzw. erfolgen kann als eine Veränderung bzw. Anpassung des Verdrängervolumens je Arbeitsspiel.
- Die Vorgabe des Drehzahlsollwerts und/oder die Anpassung des Drehzahlsollwerts und/oder die Vorgabe des Sollwerts für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße erfolgt vorzugsweise unter Verwendung eines Modells, in dem die Geschwindigkeit der Verstellung des Förderwerks berücksichtigt wird, und besonders bevorzugt unter Verwendung einer modellprädiktiven Regelung (mit einem solchen Modell). Eine modellprädiktive Regelung (engl. "Model Predictive Control", MPC) ermöglicht eine besonders einfache und genaue und damit auch effiziente Regelung, insbesondere deshalb, da das nichtlineare Verhalten des hier vorliegenden elektrohydraulischen Systems mit Verstellpumpe und Antrieb besonders gut abgebildet werden kann.
- Die modellprädiktive Regelung ist ein Regelungskonzept, welches bereits Anwendung in der Industrie findet. Durch die Prädiktion des zukünftigen Systemverhaltens in jedem Abtastschritt, d.h. einem bestimmten Zeitintervall, wird eine sehr hohe Regelungsgüte erzielt. Im Gegensatz zu klassischen Regelungskonzepten können Eingangs-, Ausgangs- und Zustandsbeschränkungen explizit berücksichtigt werden. Die Auswirkung einer Veränderung der Reglerparameter auf das Systemverhalten ist zumeist sehr intuitiv. Zur Realisierung des rechenaufwendigen Regelungskonzeptes für schnelle mechatronische Systeme können Ansätze wie das Move-Blocking zur Reduktion der Optimierungsparameter auf dem Prädiktionshorizont, oder weitere Ansätze wie die explizite modellprädiktive Regelung verwendet werden.
- In dem erwähnten Modell wird die Geschwindigkeit der Verstellung des Förderwerks bevorzugt unter Verwendung wenigstens einer der folgenden Parameter berücksichtigt: einem maximal möglichen Verdrängervolumen je Arbeitsspiel, einem minimal möglichen Verdrängervolumen je Arbeitsspiel, einem Druck eines Mediums, mit dem die Verstellpumpe betrieben wird, einem Istwert der Drehzahl des Antriebs, einer Viskosität des Mediums, und mechanische und/oder elektrische Parameter eines Verstellsystems der Verstellpumpe. Das maximal und das minimal mögliche Verdrängervolumen je Arbeitsspiel können auch als ein Quotient berücksichtigt werden.
- Diese Parameter beeinflussen, typischerweise in verschiedenem Maße, die Geschwindigkeit der Verstellung des Förderwerks, d.h. wie schnell oder langsam die Verstellung nach Ansteuerung erfolgen wird. Je nach aktueller Geschwindigkeit der Verstellung des Förderwerks - im Falle einer Axialkolbenpumpe mit Schwenkscheibe auch als Schwenkwinkelgeschwindigkeit bezeichnet - wird eine Umsetzung einer Veränderung des Verdrängervolumens je Arbeitsspiel schneller oder langsamer erfolgen, was auch Einfluss auf die Angleichung der Drehzahl des Antriebs hat. Bei langsamer Verstellung des Verdrängervolumens je Arbeitsspiel - also geringer Dynamik bzw. Geschwindigkeit - ist beispielsweise eine geringere oder geringer ansteigende Vorsteuerung der Drehzahl nötig als bei hoher Geschwindigkeit.
- In dem erwähnten Modell wird die Geschwindigkeit der Verstellung des Förderwerks bevorzugt als modellierter Istwert für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße berücksichtigt. Aus diesem modellierten Istwert kann insbesondere ein Drehzahlkorrekturwert (z.B. ein additiver Drehzahlwert) zur Anpassung des Drehzahlsollwerts bestimmt werden.
- Vorzugsweise wird der Drehzahlsollwert bei einer Änderung des Sollwerts für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße weiterhin in Abhängigkeit von wenigstens einem Optimierungskriterium angepasst, das insbesondere ausgewählt ist aus: einem von der Verstellpumpe erzeugten Geräusch, einer Effizienz der Verstellpumpe, und einer Auslastung des Antriebs. Hiermit lässt sich der Betrieb weiter optimieren, insbesondere wenn die Pumpe in Teillast betrieben wird.
- Je nachdem ob nun z.B. ein Aus- oder Einschwenkvorgang der Verstellpumpe (bzw. der Schwenkscheibe) eingeleitet werden soll, wird zweckmäßigerweise abhängig von der Schwenkrichtung (d.h. in Richtung höheres oder geringeres Verdrängervolumen), Systemparametern, sonstigen Komponentenparametern und/oder aktuellen Zuständen des (elektrohydraulischen) Systems eine Soll-Trajektorie für die Drehzahl und das notwendige Veränderungsdrehmoment ermittelt. Gleichzeitig wird dann insbesondere das sich verändernde hydraulische Moment z.B. abhängig vom aktuellen Druck und einem Modell der Änderung des Fördervolumens der Pumpe, direkt vorgesteuert.
- Zusätzlich zum Vorsteuern der Drehzahl ist vorzugsweise vorgesehen, dass auch ein Momentensollwert für den Antrieb bei einer Änderung des Sollwerts für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße im Wege einer Vorsteuerung in Abhängigkeit von einer Dynamik bzw. Geschwindigkeit einer Verstellung des Förderwerks, insbesondere auch arbeitspunktabhängig, angepasst wird. Insbesondere kann hier ein Produkt aus dem modellierten Istwert für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße und dem Istdruck einfließen, d.h. insbesondere ein modellierter Wert für ein hydraulisches Moment wird vorgesteuert. Die oben dargestellten Punkte gelten dann ebenso für die Momentenvorsteuerung. Das Vorsteuern eines Momentenwerts ist insbesondere vorteilhaft, wenn beim Betrieb eines elektrischen Antriebs dem Drehzahlregler ein Drehmomentregler unterlagert ist.
- Eine erfindungsgemäße Recheneinheit, z.B. eine Steuer- und/oder Regeleinheit für eine drehzahlvariable Verstellpumpe mit drehzahlvariablem Antrieb, ist, insbesondere programmtechnisch, dazu eingerichtet, ein erfindungsgemäßes Verfahren durchzuführen.
- Gegenstand der Erfindung ist weiterhin ein elektrohydraulisches Antriebssystem wie z.B. eine elektrohydraulische Achse umfassend eine drehzahlvariablen Verstellpumpe mit einem drehzahlvariablen Antrieb sowie eine erfindungsgemäße Recheneinheit.
- Auch die Implementierung eines erfindungsgemäßen Verfahrens in Form eines Computerprogramms oder Computerprogrammprodukts mit Programmcode zur Durchführung aller Verfahrensschritte ist vorteilhaft, da dies besonders geringe Kosten verursacht, insbesondere wenn ein ausführendes Steuergerät noch für weitere Aufgaben genutzt wird und daher ohnehin vorhanden ist. Geeignete Datenträger zur Bereitstellung des Computerprogramms sind insbesondere magnetische, optische und elektrische Speicher, wie z.B. Festplatten, Flash-Speicher, EEPROMs, DVDs u.a.m. Auch ein Download eines Programms über Computernetze (Internet, Intranet usw.) ist möglich.
- Weitere Vorteile und Ausgestaltungen der Erfindung ergeben sich aus der Beschreibung und der beiliegenden Zeichnung.
- Es versteht sich, dass die vorstehend genannten und die nachfolgend noch zu erläuternden Merkmale nicht nur in der jeweils angegebenen Kombination, sondern auch in anderen Kombinationen oder in Alleinstellung verwendbar sind, ohne den Rahmen der vorliegenden Erfindung zu verlassen.
- Die Erfindung ist anhand eines Ausführungsbeispiels in der Zeichnung schematisch dargestellt und wird im Folgenden unter Bezugnahme auf die Zeichnung ausführlich beschrieben.
-
- Figur 1
- zeigt schematisch ein elektrohydraulisches System, das erfindungsgemäß betrieben werden kann.
- Figur 2
- zeigt schematisch einen Ablauf eines erfindungsgemäßen Verfahrens einer bevorzugten Ausführungsform als Regelkreis.
- Figur 3
- zeigt schematisch einen Ablauf eines erfindungsgemäßen Verfahrens einer weiteren bevorzugten Ausführungsform als Regelkreis.
- In
Figur 1 ist ein elektrohydraulisches System 100, wie es der Erfindung zugrunde liegen kann, schematisch dargestellt. Das elektrohydraulische System 100 weist einen als Hydraulikzylinder 110 mit einem entlang einer x-Achse beweglichen Kolben 111 ausgebildeten Aktor auf, der von einer drehzahlvariablen Verstellpumpe 120 betätigt wird. Zwischen der drehzahlvariablen Verstellpumpe 120 und dem Hydraulikzylinder 110 ist ein Hydraulikkreislauf 130 mit z.B. Öl als Medium bzw. Betriebsmedium angeordnet. - Die drehzahlvariable Verstellpumpe 120 weist einen als Elektromotor 121 ausgebildeten drehzahlvariablen Antrieb und ein Förderwerk 122 auf und ist insbesondere als Axialkolbenpumpe in Schwenkscheibenbauweise ausgebildet. Durch Verstellung des Winkels der Schwenkscheibe, also des sog. Schwenkwinkels, kann das Verdrängervolumen des Förderwerks je Arbeitsspiel verändert werden.
- Eine Steuer- und/oder Regeleinheit 140 ist programmtechnisch zur Durchführung einer bevorzugten Ausführungsform eines erfindungsgemäßen Verfahrens eingerichtet und gibt einen Drehzahlsollwert nsoll sowie einen Schwenkwinkelsollwert αsoll als einen Sollwert für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße vor. Zur Regelung der Stellgrößen ist jeweils eine Rückführung der Istwerte nist sowie αlst vorgesehen. Dies kann z.B. unter Einsatz herkömmlicher Sensoren bewerkstelligt werden.
- In
Figur 2 ist ein Regelkreis gemäß einer bevorzugten Ausführungsform der Erfindung bzw. eines erfindungsgemäßen Verfahrens dargestellt, wie er programmtechnisch in einer Steuer- und/oder Regeleinheit implementiert sein kann. Dabei wird beispielhaft in einem (überlagerten) Regelkreis ein Druck pist in einem Hydraulikkreislauf 130, wie er z.B. inFigur 1 gezeigt ist, auf einen Sollwert psoll geregelt. - Hierzu werden als Stellgrößen von einem hier als PI-Regler 150 ausgebildeten Regler ein Drehzahlsollwert n'soll bzw. nsoll (auf den Unterschied zwischen diesen Sollwerten wird später eingegangen) für eine Drehzahl des Antriebs 121 und ein Sollwert αsoll für einen Schwenkwinkel als die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße ermittelt bzw. vorgegeben. Diese Sollwerte für Drehzahl und Schwenkwinkel werden dann entsprechend im Antrieb 121 bzw. im Förderwerk 122 umgesetzt. Antrieb 121 und Schwenkwinkelverstellung des Förderwerks 122 reagieren auf die Sollvorgaben üblicherweise gemäß einem PT1-Verhalten mit entsprechenden Zeitkonstanten T1 bzw. T2. Dabei erhaltene Istwerte, ein Drehzahlistwert nist und ein Schwenkwinkelistwert αist, ergeben dann einen Volumenstrom Q und dann im Hydraulikkreislauf 130 unter Berücksichtigung von Kompressionsfaktor und Volumen des Mediums, das komprimiert wird, den entsprechenden Istwert pist für den Druck des Mediums im Hydraulikkreislauf 130. Dies hat, über ein zu überwindendes hydraulisches Moment Mhyd, entsprechend auch Einfluss auf die Drehzahl des Antriebs.
- Wenn nun der Schwenkwinkel bzw. allgemein das Verdrängervolumen je Arbeitsspiel des Förderwerks z.B. aus Effizienzgründen verändert werden soll, so wird zugleich bzw. parallel hierzu der zunächst von dem Regler 150 ermittelte bzw. vorgegebene Drehzahlsollwert n'soll in Abhängigkeit von einer aktuellen Geschwindigkeit 165 einer Verstellung des Förderwerks und im Wege einer Vorsteuerung angepasst, sodass der (angepasste) Drehzahlsollwert nsoll erhalten wird, der dann weiter verwendet wird. Dies erfolgt insbesondere im Rahmen einer modellprädiktiven Regelung 160 mit einem entsprechenden Modell (oftmals auch als "DigitalTwin" bezeichnet) für die Verstellpumpe.
- Dabei werden insbesondere auch verschiedene Parameter berücksichtigt. Bei der Geschwindigkeit 165 kann z.B. ein Verhältnis bzw. Quotient von maximal möglichem zu minimal möglichem Schwenkwinkel (oder eines entsprechenden Quotienten der Verdrängervolumina) in die Ermittlung des angepassten Drehzahlsollwerts eingehen, das wiederum von einem aktuellen Schwenkwinkel abhängen kann, was hier - durch das Modell - als Schätzwert oder berechneter Wert α*ist berücksichtigt ist.
- Ebenso kann die Art der Verstellung bzw. des Verstellsystems für den Schwenkwinkel einen Einfluss auf die Geschwindigkeit haben. So kann beispielsweise eine elektronische Schwenkwinkelverstellung vorgesehen sein, bei der mittels Strom eine Magnetkraft erzeugt wird, die einer (mechanischen) Federkraft in einem Verstellzylinder entgegenwirkt.
- Auf diese Weise wird die Drehzahl zugleich mit dem Schwenkwinkel angepasst und es erfolgt keine Veränderung des Drucks im Hydraulikkreislauf 130, sodass kein Eingriff des (übergeordneten) Reglers 150 nötig ist. An dieser Stelle sei angemerkt, dass als die (übergeordnet) zu regelnde Größe anstatt des Drucks z.B. auch die Position x des Elements bzw. Kolbens 111 gemäß
Figur 1 verwendet werden kann. - In
Figur 3 ist ein Regelkreis gemäß einer weiteren bevorzugten Ausführungsform der Erfindung bzw. eines erfindungsgemäßen Verfahrens dargestellt, wie er programmtechnisch in einer Steuer- und/oder Regeleinheit implementiert sein kann. Dabei wird erneut beispielhaft ein Druck pist in einem Hydraulikkreislauf 130, wie er z.B. inFigur 1 gezeigt ist, auf einen Sollwert psoll geregelt. - Hierzu wird als Stellgröße von einem hier ebenfalls als PI-Regler 150 ausgebildeten Regler ein Drehzahlsollwert nsoll für eine Drehzahl des Antriebs 121 ermittelt bzw. vorgegeben. Aus dem Drehzahlsollwert nsoll wird unter Berücksichtigung eines Korrektur- bzw. Vorsteuerterms Δn* (auf diesen wird später eingegangen) durch Abzug des Drehzahlistwerts nist ein Drehzahlfehler en berechnet und einem Drehzahlregler 151 (hier ebenfalls als PI-Regler ausgeführt) zugeführt, der ein Sollmoment Msoll ausgibt und auf den Antrieb 121, der wieder mit einem PT1-Verhalten modelliert ist, einwirkt. Hieraus ergibt sich dann ein elektrisches Antriebsmoment MA der Pumpe 120.
- Ebenso wird ein Schwenkwinkel α als die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße dem Förderwerk 122, dessen Schwenkwinkelverstellung wieder mit einem PT1-Verhalten modelliert ist, vorgegeben, woraus sich der Schwenkwinkel (bzw. eine entsprechende Volumengröße) α* ergibt.
- Aus dem Antriebsmoment MA ergibt sich unter Berücksichtigung eines zu überwindenden hydraulischen Moments Mhyd ein effektives Moment Meff der Pumpe 120, welches auf die Drehzahl wirkt. Dabei ergibt sich das hydraulische Moment Mhyd wie oben als Produkt aus Volumengröße α* und Istdruck, welches ggf. über ein P-Glied gewichtet bzw. verstärkt werden kann.
- Aus dem Produkt der Drehzahl nist und der Volumengröße α* ergibt sich ein Volumenstrom Q, welcher ggf. über ein P-Glied gewichtet bzw. verstärkt werden kann, und dann im Hydraulikkreislauf 130 unter Berücksichtigung von Kompressionsfaktor und Volumen des Mediums, das komprimiert wird, der entsprechende Istdruck pist.
- Wenn nun der Schwenkwinkel α bzw. allgemein das Verdrängervolumen je Arbeitsspiel des Förderwerks z.B. aus Effizienzgründen verändert werden soll, so wird zugleich bzw. parallel hierzu der zunächst von dem Regler 150 ermittelte bzw. vorgegebene Drehzahlsollwert nsoll im Wege einer Vorsteuerung mit dem Korrektur- bzw. Vorsteuerterm Δn* angepasst. Der Vorsteuerterm Δn* wird insbesondere im Rahmen einer modellprädiktiven Regelung 160 mit einem entsprechenden Modell (oftmals auch als "DigitalTwin" bezeichnet) für die Verstellpumpe (deren Schwenkwinkelreaktion auf die Schwenkwinkelvorgabe α innerhalb des Blocks 160 mit einem PT1-Verhalten modelliert ist), ermittelt. Im vorliegenden Beispiel wird der sich hieraus ergebende modellierte Ist-Schwenkwinkel über ein P-Glied zur Gewichtung bzw. Verstärkung geführt und als additiver Drehzahlwert Δn*auf den Drehzahlsollwert nsoll aufgeschaltet. Gleichzeitig wird der modellierte Ist-Schwenkwinkel (bzw. das Volumen) multipliziert mit dem Istdruck über ein P-Glied geführt und als additiver Momentenwert M*hyd auf den Momentensollwert Msoll aufgeschaltet.
- Durch das beschriebene Schema können im Falle der Anpassung bzw. Variation einer Übersetzung (also des Schwenkwinkels) im Hydraulikkreislauf bestimmte Einflüsse berücksichtigt werden. Einer Änderung der Verstärkung des offenen Regelkreises kann durch eine Anpassung der Verstärkung kp im Druckregler 150 begegnet werden, einer Änderung des Volumenstroms Q des Mediums durch eine Anpassung der Drehzahl der Pumpe (über Δn*), und einer Änderung des hydraulischen Moments durch eine Anpassung des Sollmoments (über M*hyd) für den Antrieb. Dies kann entsprechend im erwähnten Modell bzw. in der modellprädiktiven Regelung berücksichtigt werden. Im Vergleich zum Beispiel aus
Figur 2 wird hier also insbesondere zusätzlich das hydraulische Moment vorgesteuert.
Claims (12)
- Verfahren zum Betreiben einer drehzahlvariablen Verstellpumpe (120), bei der ein in einem Verdrängervolumen je Arbeitsspiel verstellbares Förderwerk (122) mittels eines drehzahlvariablen Antriebs (121) angetrieben wird, wobei im Rahmen einer Regelung wenigstens eine Größe durch Vorgabe eines Drehzahlsollwerts (nsoll) für eine Drehzahl des Antriebs und eines Sollwerts (αsoll) für eine das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße auf einen Sollwert (psoll) geregelt werden,
wobei der Drehzahlsollwert (nsoll) bei einer Änderung des Sollwerts (αsoll) für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße im Wege einer Vorsteuerung in Abhängigkeit von einer Geschwindigkeit (165) einer Verstellung des Förderwerks (121) angepasst wird. - Verfahren nach Anspruch 1, wobei die Vorgabe des Drehzahlsollwerts (nsoll) und/oder die Anpassung des Drehzahlsollwerts (nsoll) und/oder die Vorgabe des Sollwerts (αsoll) für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße unter Verwendung eines Modells erfolgt, in dem die Geschwindigkeit der Verstellung des Förderwerks (121) berücksichtigt wird.
- Verfahren nach Anspruch 2, wobei die Vorgabe des Drehzahlsollwerts (nsoll) und/oder die Anpassung des Drehzahlsollwerts (nsoll) und/oder die Vorgabe des Sollwerts (αsoll) für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße unter Verwendung einer modellprädiktiven Regelung (160) erfolgt.
- Verfahren nach Anspruch 2 oder 3, wobei in dem Modell die Geschwindigkeit (165) der Verstellung des Förderwerks (121) unter Verwendung wenigstens einer der folgenden Parameter berücksichtigt wird: einem maximal möglichen Verdrängervolumen je Arbeitsspiel, einem minimal möglichen Verdrängervolumen je Arbeitsspiel, einem Druck eines Mediums, mit dem die Verstellpumpe betrieben wird, einem Istwert der Drehzahl (nist) des Antriebs, einer Viskosität des Mediums, und mechanische und/oder elektrische Parameter eines Verstellsystems der Verstellpumpe (120).
- Verfahren nach einem der vorstehenden Ansprüche, wobei die im Rahmen der Regelung wenigstens eine auf den Sollwert (psoll) geregelte Größe ausgewählt ist aus: einem Druck und/oder einem Volumenstrom eines Mediums, mit dem die Verstellpumpe betrieben wird, einer Kraft, die direkt oder indirekt durch das Medium erzeugt wird, und einer Position (x) eines Elements (111), das direkt oder indirekt durch das Medium bewegt wird.
- Verfahren nach einem der vorstehenden Ansprüche, wobei der Drehzahlsollwert (nsoll) bei einer Änderung des Sollwerts (αsoll) für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße weiterhin in Abhängigkeit von wenigstens einem Optimierungskriterium angepasst wird, das insbesondere ausgewählt ist aus: einem von der Verstellpumpe (120) erzeugten Geräusch, einer Effizienz der Verstellpumpe (120), und einer Auslastung des Antriebs (121).
- Verfahren nach einem der vorstehenden Ansprüche, wobei ein Momentensollwert (Msoll) für den Antrieb (121) bei einer Änderung des Sollwerts (αsoll) für die das Verdrängervolumen je Arbeitsspiel bestimmende Kenngröße im Wege einer Vorsteuerung in Abhängigkeit von einer Geschwindigkeit (165) einer Verstellung des Förderwerks (121) angepasst wird.
- Verfahren nach einem der vorstehenden Ansprüche, bei dem eine Axialkolbenpumpe als Verstellpumpe (120) verwendet wird, insbesondere mit einer Zweipunktverstellung oder einer Proportionalverstellung.
- Recheneinheit (140), die dazu eingerichtet ist, ein Verfahren nach einem der vorstehenden Ansprüche durchzuführen.
- Elektrohydraulisches System (100) umfassend eine drehzahlvariablen Verstellpumpe (120) mit einem drehzahlvariablen Antrieb (121) und eine Recheneinheit (140) nach Anspruch 9.
- Computerprogramm, das eine Recheneinheit (140) veranlasst, ein Verfahren nach einem der Ansprüche 1 bis 8 durchzuführen, wenn es auf der Recheneinheit (140) ausgeführt wird.
- Maschinenlesbares Speichermedium mit einem darauf gespeicherten Computerprogramm nach Anspruch 11.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102019220322.1A DE102019220322A1 (de) | 2019-12-20 | 2019-12-20 | Verfahren zum Betreiben einer drehzahlvariablen Verstellpumpe |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3839256A1 true EP3839256A1 (de) | 2021-06-23 |
| EP3839256B1 EP3839256B1 (de) | 2022-08-24 |
Family
ID=74141258
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20213692.5A Active EP3839256B1 (de) | 2019-12-20 | 2020-12-14 | Verfahren zum betreiben einer drehzahlvariablen verstellpumpe |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3839256B1 (de) |
| CN (1) | CN113007055A (de) |
| DE (1) | DE102019220322A1 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022203051B3 (de) | 2022-03-29 | 2023-10-12 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betreiben einer drehzahlvariablen Pumpe |
| DE102022205233B4 (de) | 2022-05-25 | 2023-12-07 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betreiben eines Elektrohydraulikaggregats |
| DE102022206540B3 (de) | 2022-06-28 | 2023-10-12 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Regelung von drehzahlvariablen Fluidpumpen |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011119299A1 (de) * | 2011-11-24 | 2013-05-29 | Robert Bosch Gmbh | Verfahren zum Betreiben einerdrehzahlvariablen Verstellpumpe |
| DE102013006137A1 (de) * | 2013-04-10 | 2014-10-16 | Robert Bosch Gmbh | Regelung drehzahlvariabler Verstellpumpen mittels modellbasierter Optimierung |
| DE102014001981A1 (de) * | 2014-02-17 | 2015-08-20 | Robert Bosch Gmbh | Dynamischer Sollwertausgleich bei drehzahlvariablen Verstellpumpen |
| EP2192309B1 (de) | 2008-11-29 | 2017-04-05 | Robert Bosch GmbH | Verfahren und Regelschaltung zur Regelung einer Druckmittelzufuhr für einen hydraulischen Aktor |
-
2019
- 2019-12-20 DE DE102019220322.1A patent/DE102019220322A1/de active Pending
-
2020
- 2020-12-14 EP EP20213692.5A patent/EP3839256B1/de active Active
- 2020-12-18 CN CN202011508905.1A patent/CN113007055A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2192309B1 (de) | 2008-11-29 | 2017-04-05 | Robert Bosch GmbH | Verfahren und Regelschaltung zur Regelung einer Druckmittelzufuhr für einen hydraulischen Aktor |
| DE102011119299A1 (de) * | 2011-11-24 | 2013-05-29 | Robert Bosch Gmbh | Verfahren zum Betreiben einerdrehzahlvariablen Verstellpumpe |
| DE102013006137A1 (de) * | 2013-04-10 | 2014-10-16 | Robert Bosch Gmbh | Regelung drehzahlvariabler Verstellpumpen mittels modellbasierter Optimierung |
| DE102014001981A1 (de) * | 2014-02-17 | 2015-08-20 | Robert Bosch Gmbh | Dynamischer Sollwertausgleich bei drehzahlvariablen Verstellpumpen |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3839256B1 (de) | 2022-08-24 |
| CN113007055A (zh) | 2021-06-22 |
| DE102019220322A1 (de) | 2021-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3839256B1 (de) | Verfahren zum betreiben einer drehzahlvariablen verstellpumpe | |
| EP2121280B1 (de) | Elektrohydraulische steueranordnung | |
| EP2357363B1 (de) | Betriebssteuerungsvorrichtung für eine Verdrängerpumpe, Pumpensystem und Verfahren zum Betreiben eines solchen | |
| DE102013006137A1 (de) | Regelung drehzahlvariabler Verstellpumpen mittels modellbasierter Optimierung | |
| DE102016222139A1 (de) | Verfahren zum Betreiben einer Axialkolbenmaschine in Schrägscheibenbauweise | |
| DE102011119299A1 (de) | Verfahren zum Betreiben einerdrehzahlvariablen Verstellpumpe | |
| DE102005025590A1 (de) | Regelvorrichtung sowie Verfahren zum Betrieb einer Regelvorrichtung | |
| AT515590B1 (de) | Dynamischer Sollwertausgleich bei drehzahlvariablen Verstellpumpen | |
| DE10110398A1 (de) | Verfahren zur Regelung der Druckmittelzufuhr zu einem hydraulisch betätigten Aktor | |
| DE102019212845A1 (de) | Hydraulische Druckmittelversorgungsanordnung und Verfahren | |
| WO2010121712A1 (de) | Verfahren und regelvorrichtung zur regelung einer druckmittelzufuhr für einen hydraulischen aktor | |
| DE102015221684A1 (de) | Verfahren zum durcksensorlosen Stellen des Drucks eines mittels einer drehzahlgeregelten Pumpe geförderten Fluids | |
| DE102021201895A1 (de) | Verfahren zum Betreiben einer drehzahlvariablen, elektrohydraulischen Pumpe, Recheneinheit und drehzahlvariable elektro-hydraulische Pumpe | |
| EP3953771A1 (de) | Hydrostatisches arbeitsgerät und verfahren zu dessen steuerung | |
| EP3988801A1 (de) | Verfahren zum betreiben eines hydraulischen antriebs | |
| DE102020213293A1 (de) | Verfahren zum Betreiben eines hydraulischen Antriebs | |
| DE102022203051B3 (de) | Verfahren zum Betreiben einer drehzahlvariablen Pumpe | |
| DE102022205233B4 (de) | Verfahren zum Betreiben eines Elektrohydraulikaggregats | |
| DE102021210117A1 (de) | Verfahren für einen hydraulischen Antrieb, Steuereinheit, Computerprogramm, und maschinenlesbares Speichermedium | |
| DE102022208574A1 (de) | Verfahren zum Betreiben eines hydraulischen Antriebs einer Maschine und hydraulischer Antrieb | |
| EP2165062A1 (de) | Verfahren und vorrichtung zur drehzahlregler-funktionsüberwachung | |
| DE102021200693A1 (de) | Verfahren zur Modellparameteranpassung einer Axialkolbenpumpe | |
| EP2984527B1 (de) | Hydraulikanordnung mit entkoppeltem betrieb zweier ventileinrichtungen | |
| WO2023156279A1 (de) | Verfahren zum betreiben einer hydraulikanordnung einer arbeitsmaschine und entsprechende arbeitsmaschine | |
| DE102021211967A1 (de) | Hydromaschine zur druckgeführten Druckmittelversorgung eines Verbrauchers, hydrostatischer Antrieb mit der Hydromaschine und Verfahren mit einem hydrostatischen Antrieb |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20211223 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: F15B 11/042 20060101ALI20220330BHEP Ipc: F03C 1/26 20060101ALI20220330BHEP Ipc: F03C 1/06 20060101ALI20220330BHEP Ipc: F04B 49/06 20060101ALI20220330BHEP Ipc: F04B 49/20 20060101ALI20220330BHEP Ipc: F04B 1/26 20060101ALI20220330BHEP Ipc: F04B 1/324 20200101ALI20220330BHEP Ipc: F04B 1/32 20200101AFI20220330BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20220520 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1513810 Country of ref document: AT Kind code of ref document: T Effective date: 20220915 Ref country code: DE Ref legal event code: R096 Ref document number: 502020001579 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20220824 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221226 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221124 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221224 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20221125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502020001579 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20221231 Year of fee payment: 3 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230509 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20230525 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220824 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240227 Year of fee payment: 4 |