EP3764323A1 - Dispositif de traitement d'informations, procédé de traitement d'informations et programme - Google Patents
Dispositif de traitement d'informations, procédé de traitement d'informations et programme Download PDFInfo
- Publication number
- EP3764323A1 EP3764323A1 EP19763265.6A EP19763265A EP3764323A1 EP 3764323 A1 EP3764323 A1 EP 3764323A1 EP 19763265 A EP19763265 A EP 19763265A EP 3764323 A1 EP3764323 A1 EP 3764323A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- posture
- model
- points
- information processing
- scene
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 48
- 238000003672 processing method Methods 0.000 title claims abstract description 8
- 238000012545 processing Methods 0.000 claims description 34
- 230000009466 transformation Effects 0.000 claims description 33
- 238000010801 machine learning Methods 0.000 claims description 15
- 238000000844 transformation Methods 0.000 claims description 12
- 239000000284 extract Substances 0.000 claims description 6
- 238000005516 engineering process Methods 0.000 abstract description 25
- 238000013507 mapping Methods 0.000 abstract description 3
- 238000010586 diagram Methods 0.000 description 32
- 238000000034 method Methods 0.000 description 22
- 230000008569 process Effects 0.000 description 19
- 238000013500 data storage Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 4
- 238000007429 general method Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 241000985694 Polypodiopsida Species 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003909 pattern recognition Methods 0.000 description 2
- 238000007637 random forest analysis Methods 0.000 description 2
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/68—Analysis of geometric attributes of symmetry
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/75—Determining position or orientation of objects or cameras using feature-based methods involving models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
Definitions
- the present technology relates to an information processing apparatus, an information processing method, and a program, and more particularly to an information processing apparatus, an information processing method, and a program that are capable of easily predicting the posture of an object.
- Such a technology for posture prediction is used in a PM (Projection Mapping) system having a plurality of projectors interlinked to project an image onto an object, for example. Processing sequences for changing the content of the projected image and correcting the projected image are carried out on the basis of the predicted posture of the object.
- PM Processing Mapping
- the posture of an object is predicted by specifying a point on the object that is pre-registered which corresponds to a certain point on the object included in a captured image, and using the relationship between these corresponding points as a basis.
- the corresponding points used to predict the posture are specified by extracting the feature quantities of points on the object included in the image and performing matching between the extracted feature quantities and learned feature quantities.
- the present technology has been developed under the circumferences described above, and is aimed at easily predicting the posture of an object.
- An information processing apparatus includes a corresponding point acquiring section that specifies, on the basis of learned data used in specifying corresponding points, obtained by performing learning using data of a predetermined portion that has symmetry with respect to other portions of an entire model that represents an object as a recognition target, second points on the model included in an input scene that correspond to first points on the model, as the corresponding points, and a posture predicting section that predicts a posture of the model included in the scene on a basis of the corresponding points.
- An information processing apparatus includes a generator that generates, when a posture of a model included in an input scene is to be predicted by performing learning using data of a predetermined portion that has symmetry with respect to other portions of the entire model that represents an object as a recognition target, the learned data used in specifying second points on the model included in the scene that correspond to first points on the model, as corresponding points.
- the learned data used in specifying second points on the model included in the scene that correspond to first points on the model as corresponding points are generated.
- FIG. 1 is a diagram illustrating a configurational example of a projection system according to an embodiment of the present technology.
- the projection system illustrated in FIG. 1 includes projectors #0 and #1 connected to a control apparatus 1 through wired or wireless communication.
- the projectors #0 and #1 are installed above a projection space with their projecting directions toward an object 22.
- the projectors #0 and #1 may be installed in positions other than the positions above the projection space.
- the control apparatus 1 is constructed as an apparatus such as a personal computer, a smartphone, or a tablet terminal.
- the control apparatus 1 includes an apparatus for controlling the projection of images by projectors #0 and #1.
- the projectors #0 and #1 emits projection light representing predetermined images under the control of the control apparatus 1.
- images are projected onto the object 22 placed on a floor 21 using the projectors #0 and #1.
- the image by the projection light emitted from the projector #0 is mainly projected onto a position on the left side of the object 22, and the image by the projection light emitted from the projector #1 is mainly projected onto a position on the right side of the object 22.
- texture images rendered to represent the texture of the surface of the object 22, for example, texture of metal or texture of wood. Images may be projected not only to represent textures, but also to present various pieces of information and to produce three-dimensional effects.
- the projectors #0 and #1 project various images such as images for displaying characters at positions around the object 22 on the floor 21.
- the projection system illustrated in FIG. 1 thus includes a PM (Projection Mapping) system for projecting images onto the surface of the object 22 that has a three-dimensional shape. Images may be projected onto an object having a planar shape, rather than an object having a three-dimensional shape.
- PM Processing Mapping
- FIG. 2 is a block diagram illustrating the configurational example of the projection system.
- Each of the projectors #0 through #N includes an image capturing unit including a camera, in addition to a projection unit including a display device, a lens, a light source, and the like.
- the image capturing unit #0-1, of the projector #0 for example, captures an image of the state of the projection space including the object 22.
- the image captured by the image capturing unit #0-1 is supplied to the control apparatus 1.
- the projection unit #0-2 projects a projection image assigned to the projector #0 under the control of the control apparatus 1.
- Each of the image capturing units #1-1 through #N-1, of the projectors #1 through #N also captures an image of the state of the projection space.
- Each of the projection units #1-2 through #N-2, also projects a projection image assigned to its own projector.
- the number of the projection units and the number of the image capturing units are the same as each other. However, the numbers may be different from each other. Alternatively, the image capturing units may not be incorporated in the projectors, but may be installed in remote positions. The configuration of the control apparatus 1 may be included in the projectors.
- the control apparatus 1 includes a captured image processing section 31 and a projection image processing section 32.
- the captured image processing section 31 predicts the posture of the object 22 on the basis of the images captured by the image capturing units of the respective projectors. Information for recognizing the object 22 included in the captured images and predicting the posture has been made ready for the control apparatus 1.
- the captured image processing section 31 outputs information representing the result of the prediction of the posture of the object 22 to the projection image processing section 32.
- the projection image processing section 32 generates projection images to be projected from the respective projectors onto the object 22 as a projection target.
- the projection image processing section 32 appropriately performs a process of changing the contents of the images to projected and correcting the images to be projected on the basis of the posture of the object 22 that has been predicted by the captured image processing section 31.
- the control apparatus 1 thus includes an information processing apparatus having a function to recognize the pre-registered object 22 on the basis of the images captured by the cameras and to predict the posture of the object 22.
- the posture of the object may not be predicted on the basis of the images captured by the cameras, but may be predicted on the basis of various inputs such as of point group data representing distances measured by a ranging sensor.
- the posture predicting function of the control apparatus 1 will hereinafter be described below.
- model An object as a registered recognition target will hereinafter be referred to as "model” as required.
- Data of the model input as a registered recognition target, such as image data, point group data representing distances, etc. will be referred to as "scene.”
- a scene represents a model having a certain posture.
- the relationship between a model and the posture of the model included in the scene thereof may be represented by a two-dimensional or three-dimensional rigid transformation or a holographic transformation.
- FIG. 3 is a diagram illustrating the flow of a general method of recognizing a model included in a scene and predicting the posture of the model.
- feature quantities are extracted from the entire model.
- Data of the extracted feature quantities are stored as data representing a dictionary pointed by the tip of the arrow A2.
- SIFT, SURF, and ORB are used as feature quantities.
- SHOT, FPFH, and PPF are used as feature quantities.
- SIFT, SURF, and ORB are described respectively in the documents [1] through [3] illustrated below.
- SHOT, FPFH, and PPF are described respectively in the documents [4] through [6] illustrated below.
- feature quantities are extracted from the scene, as pointed by the tip of the arrow A11.
- matching between the feature quantities extracted from the scene and the feature quantities stored in the dictionary is performed, and corresponding points on the model and the model included in the scene are acquired. For example, a plurality of points on the model and a plurality of points, corresponding to those points, on the model included in the scene are acquired.
- posture hypotheses for the model included in the scene are calculated on the basis of the relationship between the corresponding points are calculated, and the posture hypothesis that best matches the conditions is output as the result of the prediction of the posture, as pointed by the tip of the arrow A15.
- FIG. 4 is a diagram illustrating the flow of another general method of predicting the posture of a model.
- the posture prediction illustrated in FIG. 4 refers to a process using machine learning.
- a corresponding point predictor that has learned the relationship between corresponding points is generated.
- a predictor that outputs corresponding points when a scene is input is generated as a corresponding point predictor.
- the corresponding point predictor is configured as a predictor of Random Forest, a predictor of Random Ferns, or a neural network.
- corresponding points on the model and the model included in the scene are acquired by using the scene as the input to the corresponding point predictor, as pointed by the tips of the arrows A22 and A23.
- posture hypotheses for the model included in the scene are calculated on the basis of the relationship between the corresponding points are calculated, and the posture hypothesis that best matches the conditions is output as the result of the prediction of the posture, as pointed by the tip of the arrow A25.
- FIG. 5 is a diagram illustrating an example of a model.
- the model is a planar object as illustrated in FIG. 5 and a star-shaped object with five vertexes disposed at equal spaced intervals.
- the posture of the model and the posture of the model included in the scene are not identical to each other.
- the posture of the model included in the scene is predicted on the basis of learned data generated beforehand by performing a learning process using the data of the model.
- the model illustrated in FIG. 5 has symmetry.
- posture prediction in a case where a model has symmetry is described in the following document [7] : [7] de Figueiredo, Rui Pimentel, Plinio Moreno, and Alexandre Bernardino. "Fast 3D object recognition of rotationally symmetric objects.” Iberian Conference on Pattern Recognition and Image Analysis. Springer, Berlin, Heidelberg, 2013 .
- the technology described in the document [7] performs three-dimensional object recognition of rotational bodies using PPF extracted from a point group (the document [6]). This technology is applicable only where the input is a point group and PPF is used as feature quantities. In addition, the technology is not applicable to the recognition of objects that has any symmetry, other than rotational bodies.
- the control apparatus 1 is able to predict the posture of objects that have any symmetry, other than rotational bodies.
- FIG. 7 is a block diagram illustrating a configurational example of the captured image processing section 31.
- the captured image processing section 31 includes a learning section 51 and a predicting section 52.
- the learning section 51 functions as a generator that performs learning based on the data of a model and generates a dictionary used in acquiring corresponding points.
- the learning section 51 includes a model data storage section 61, a feature quantity extracting region calculating section 62, a feature quantity extracting section 63, and a dictionary storage section 64.
- the model data storage section 61 stores the data of the model.
- the data of the model stored by the model data storage section 61 include data regarding the texture and shape (at least either one of the texture or the shape) of the model, and data regarding the symmetry of the model.
- the data regarding the symmetry of the model are supplied to the feature quantity extracting region calculating section 62 at the time of learning and also supplied to a model posture predicting section 73 of the predicting section 52 at the time of posture prediction.
- the symmetry of the model is represented as a set of coordinate transformations ⁇ T i ⁇ such that the model M that has been transformed coincides with the model M prior to being transformed.
- the transformed model M on which the coordinate transformations ⁇ T i ⁇ have been performed are identical to the model M prior to being transformed in terms of the texture and shape, the model M has symmetry.
- ⁇ T i ⁇ represents a set of four coordinate transformations including a coordinate transformation T 1 for transferring the vertex A to the vertex B, a coordinate transformation T 2 for transferring the vertex A to the vertex C, a coordinate transformation T 3 for transferring the vertex A to the vertex D, and a coordinate transformation T 4 for transferring the vertex A to the vertex E.
- ⁇ T i ⁇ may be a finite set or an infinite set.
- the data regarding the symmetry of the model may be input by the user of the control apparatus 1 or may be automatically predicted by the control apparatus 1 on the basis of the data regarding the texture and shape of the model.
- the feature quantity extracting region calculating section 62 calculates a partial region that represents the region of a portion, as a target where feature quantities are to be extracted, of the entire surface of the model.
- the partial region is calculated (established) by referring to the data regarding the symmetry of the model.
- the feature quantity extracting region calculating section 62 establishes a partial region So that satisfies a condition according to the equation (1) below and a condition according to the equation (2) below.
- the equation (1) represents a condition for requesting that no matter what coordinate transformations T i are performed on the partial region S 0 , the transformed partial region S 0 should not overlap the partial region S 0 prior to being transformed.
- the equation (2) represents a condition for requesting that the union of transformed regions after coordinate transformations T i have been performed on the partial region S 0 should cover the entire surface of the model M.
- S M represents the entire surface of the model M.
- FIG. 9 is a diagram illustrating an example of a calculation of the partial region S 0 .
- the data of the partial region S 0 thus calculated are supplied from the feature quantity extracting region calculating section 62 to the feature quantity extracting section 63.
- the feature quantity extracting section 63 extracts feature quantities of points in the partial region S 0 .
- the data of the extracted feature quantities in the partial region S 0 are supplied to the dictionary storage section 64, and stored as data of a dictionary therein.
- the region is established as the partial region S 0 . In this manner, it is possible to prevent data of similar feature quantities from being overlappingly stored in a dictionary.
- the predicting section 52 refers to the dictionary obtained from the learning performed by the learning section 51 and predicts the posture of the model included in the scene.
- the predicting section 52 includes a feature quantity extracting section 71, a corresponding point acquiring section 72, and the model posture predicting section 73.
- the feature quantity extracting section 71 extracts feature quantities of the entire scene, and outputs the extracted feature quantities to the corresponding point acquiring section 72.
- the corresponding point acquiring section 72 performs matching between the feature quantities of the partial region S 0 stored in the dictionary and the feature quantities of the entire scene, and acquires points on the model included in the scene that correspond to the points on the model, as corresponding points.
- FIG. 12 is a diagram illustrating an example of corresponding points.
- a vertex a, a vertex b, a vertex c, a vertex d, and a vertex e are acquired as corresponding points that correspond to the vertex A on the model, as illustrated in FIG. 12 . Since the feature quantities used for matching are few, it is possible to reduce the computational time required for matching, compared with the case in which matching is performed between the feature quantities of the entire model as described with reference to FIG. 6 .
- the model posture predicting section 73 establishes posture hypotheses as candidates for the posture of the model included in the scene on the basis of the corresponding points acquired by the corresponding point acquiring section 72. For example, posture hypotheses are established on the basis of the relationship between points on the model and points on the model included in the scene. There are established a plurality of posture hypotheses, for example.
- the model posture predicting section 73 selects one of the posture hypotheses as a final posture and outputs the selected posture as the result of the prediction.
- the model posture predicting section 73 selects the final posture by referring to the data regarding the symmetry of the model.
- the final posture is selected according to robust prediction such as RANSAC (Random Sampling Consensus) or posture clustering.
- RANSAC Random Sampling Consensus
- the robust prediction refers to a process for predicting a posture taking into account the possibility that an outlier may be included in given observation values.
- the general posture prediction described herein refers to predicting a posture without taking into account the symmetry of the model.
- RANSAC represents a method of repeating a process for defining reliability s(h) with respect to posture hypotheses h and selecting a posture hypothesis h whose value of reliability s(h) is large from a group of posture hypotheses.
- the reliability s(h) is represented by the equation (4) below, for example.
- p m indicates a point on the model and p s indicates a point on the scene (a point on the model included in the scene).
- p m and p s are acquired as corresponding points by the corresponding point acquiring section 72.
- d(p,q) represents a function for defining the distance between the point p and the point q.
- a Euclidean distance for example, is used as the distance between the point p and the point q.
- ⁇ represents a predetermined threshold value.
- 1( ⁇ ) represents a function that takes the value 1 in a case where the condition in the parentheses is fulfilled and that takes the value 0 otherwise.
- a value of 1 is established in a case where the minimum value of the distance between a point hp m on the scene at the time the posture hypothesis h is given to a point p m on the model and a point p s on the scene which corresponds to the point p m is smaller than the threshold value ⁇ . Furthermore, the sum of established values at the time such a value is established with respect to all points p s is determined as reliability s(h).
- FIG. 13 is a diagram illustrating an example of computation of an established value.
- the point p m on the model is represented as a point hp m on the scene.
- the minimum distance of the distances between the point hp m on the scene and a plurality of points p s as corresponding points is compared with the threshold value ⁇ , thereby providing an established value.
- outlined triangles indicated on the scene represent respective points p s as corresponding points.
- the posture clustering calculates the final posture of the model by grouping posture hypotheses whose degrees of similarity are high among a group of posture hypotheses.
- the degree of similarity l (h 1 , h 2 ) between two posture hypotheses h 1 and h 2 is represented by the equation (6) below.
- trans(h) represents the magnitude of the translational component of the posture hypotheses h and angle(h) represents the magnitude of the rotational component of the posture hypotheses h.
- ⁇ t and ⁇ r represent predetermined threshold values.
- the degree of similarity l (h 1 , h 2 ) takes a value of 1.
- the model posture predicting section 73 of the predicting section 52 performs such RANSAC and posture clustering while taking into account the symmetry of a model.
- the symmetry of the model is represented by ⁇ T i ⁇ .
- posture hypotheses that are essentially similar to each other are handled as equivalent posture hypotheses though their values are different.
- the symmetry ⁇ T i ⁇ of the model is used in computing the point hp m on the scene at the time the posture hypothesis h is given to the point p m on the model.
- a value of 1 is established in a case where the minimum value of the distance between the point T i hp m on the scene using the symmetry ⁇ T i ⁇ of the model and the point p s on the scene which corresponds to the point p m is smaller than the threshold value ⁇ .
- the sum of established values at the time such a value is established with respect to all points p s is determined as reliability s'(h).
- FIG. 14 is a diagram illustrating an example of computation of an established value.
- the point p m on the model is represented as a point T i hp m on the scene.
- the minimum distance of the distances between the point T i hp m on the scene and a plurality of points p s as corresponding points is compared with the threshold value ⁇ , thereby providing an established value.
- the symmetry ⁇ T i ⁇ of the model is used in establishing a posture hypothesis h 1 .
- the maximum value of the degrees of similarity between posture hypotheses Tihi using the symmetry ⁇ T i ⁇ of the model and a posture hypothesis h 2 is calculated as a degree of similarity l' (T i h 1 , h 2 ).
- FIG. 15 is a diagram illustrating an example of computation of the degree of similarity of a posture hypothesis.
- a posture hypothesis h 1 illustrated in a left side of FIG. 15 and a posture hypothesis h 2 illustrated in a right side of FIG. 15 are acquired.
- both posture hypotheses are considered to be essentially equivalent to each other.
- the degree of similarity l (h 1 , h 2 ) between the posture hypothesis h 1 and the posture hypothesis h 2 should desirably be determined as a value of 1.
- the degree of similarity l (h 1 , h 2 ) between the posture hypothesis h 1 and the posture hypothesis h 2 is determined as a value of 0. This is because the values of the rotational components of the posture hypothesis h 1 and the posture hypothesis h 2 are largely different from each other.
- the degree of similarity l' (h 1 , h 2 ) between the posture hypothesis h 1 and the posture hypothesis h 2 is determined as a value of 1. This is because in a case where the coordinate transformation T 1 (a coordinate transformation for shifting the vertex A to the vertex B) is performed on the posture hypothesis hi, the model of the posture hypothesis h 1 is converted to the posture illustrated in a left side of FIG. 16 , and the value of the converted posture hypothesis Tihi and the value of the posture hypothesis h 2 are close to each other. In a case where the posture hypothesis T 1 h 1 and the posture hypothesis h 2 are overlappingly illustrated, the two posture hypotheses are related to each other as illustrated in FIG. 17 .
- the model posture predicting section 73 selects one posture hypothesis as a final posture according to RANSAC taking into account the symmetry of the model or posture clustering, and outputs the selected posture hypothesis as the result of the prediction.
- control apparatus 1 Operation of the control apparatus 1 that has the configuration described above will be described herein below.
- the learning process illustrated in FIG. 18 is started when the data regarding the texture and shape of the model and the data regarding the symmetry of the model are input, for example.
- step S1 the feature quantity extracting region calculating section 62 refers to the data regarding the symmetry of the model and calculates a partial region So as a target where feature quantities are to be extracted.
- a partial region So that satisfies the condition of the equation (1) and the condition of the equation (2) is established, as described above.
- step S2 the feature quantity extracting section 63 extracts feature quantities in the partial region So.
- step S3 the dictionary storage section 64 stores the data of the feature quantities of the partial region So in a dictionary. Then, the processing is ended.
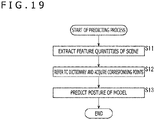
- the predicting process illustrated in FIG. 19 is started when the data of the scene are input.
- step S11 the feature quantity extracting section 71 extracts feature quantities of the entire scene.
- the corresponding point acquiring section 72 refers to the dictionary stored in the dictionary storage section 64 and performs matching between the feature quantities of the partial region So and the feature quantities of the entire scene, thereby acquiring points on the model included in the scene that correspond to points on the model as corresponding points.
- step S13 the model posture predicting section 73 performs RANSAC or posture clustering taking into account the symmetry of the model, thereby selecting one posture hypothesis as a final posture, and outputting the final posture as the result of the prediction.
- correction of the projection image etc. is carried out by the projection image processing section 32.
- the symmetry of the model as a target to be processed by the control apparatus 1 is optional, it is possible to predict the posture of not only rotational bodies, but also objects having any symmetry.
- FIG. 20 is a block diagram illustrating another configurational example of the captured image processing section 31.
- the captured image processing section 31 illustrated in FIG. 20 generates a posture predictor by performing machine learning. Furthermore, a posture is predicted using the posture predictor generated by machine learning. The learning of the posture predictor and the prediction of a posture using the posture predictor are carried out taking into account the symmetry of the model. Any description similar to the above description will be appropriately omitted below.
- the captured image processing section 31 includes a learning section 101 and a predicting section 102.
- the learning section 101 functions as a generator that performs machine learning based on the data of a model and generates a predictor used in acquiring corresponding points.
- the learning section 101 includes a model data storage section 111, a corresponding point predicting region calculating section 112, and a corresponding point predictor 113.
- the model data storage section 111 stores the data of the model.
- the data of the model stored by the model data storage section 111 include data regarding the texture and shape of the model and data regarding the symmetry of the model.
- the data regarding the symmetry of the model is supplied to the corresponding point predicting region calculating section 112 at the time of learning and also supplied to a model posture predicting section 122 of the predicting section 102 at the time of posture prediction.
- the corresponding point predicting region calculating section 112 calculates a partial region So that represents the region of a portion of the entire surface of the model, as with the feature quantity extracting region calculating section 62 illustrated in FIG. 7 .
- the partial region So serves as a region where corresponding points are predicted.
- the corresponding point predicting region calculating section 112 establishes the partial region So that satisfies the condition of the above equation (1) and the condition of the above equation (2).
- the corresponding point predicting region calculating section 112 performs machine learning using the data of the partial region So of the entire model, generating the corresponding point predictor 113. Information regarding corresponding points is also used appropriately in generating the corresponding point predictor 113.
- the corresponding point predictor 113 generated by machine learning using the data of the partial region So represents a predictor that outputs corresponding points when a scene is input.
- the corresponding point predictor 113 is configured as a predictor of Random Forest, a predictor of Random Ferns, or a neural network, for example.
- the predicting section 102 acquires corresponding points using the corresponding point predictor 113 obtained from the machine learning performed by the learning section 101 and predicts the posture of the model included in the scene.
- the predicting section 102 includes a corresponding point acquiring section 121 and the model posture predicting section 122.
- the corresponding point acquiring section 121 inputs the scene to the corresponding point predictor 113 and acquires corresponding points output from the corresponding point predictor 113.
- Information of the corresponding points acquired using the corresponding point predictor 113 is supplied to the model posture predicting section 122.
- the model posture predicting section 122 establishes posture hypotheses as candidates for the posture of the model included in the scene on the basis of the corresponding points acquired by the corresponding point acquiring section 121, as with the model posture predicting section 73 illustrated in FIG. 7 .
- the model posture predicting section 122 selects one of the posture hypotheses as a final posture according to RANSAC taking into account the symmetry of the model or posture clustering, and outputs the selected posture hypothesis as the result of the prediction.
- control apparatus 1 that has the configuration illustrated in FIG. 20 will be described herein below.
- step S51 the corresponding point predicting region calculating section 112 refers to the data regarding the symmetry of the model and calculates a partial region So.
- a partial region So that satisfies the condition of the equation (1) and the condition of the equation (2) is established, as described above.
- step S52 the corresponding point predicting region calculating section 112 performs machine learning using the data of the partial region So of the entire model, generating the corresponding point predictor 113.
- step S61 the corresponding point acquiring section 121 inputs the scene to the corresponding point predictor 113 and acquires corresponding points output from the corresponding point predictor 113.
- step S62 the model posture predicting section 122 selects one posture hypothesis as a final posture according to RANSAC taking into account the symmetry of the model or posture clustering, and outputs the selected posture hypothesis as the result of the prediction.
- correction of the projection image etc. is carried out by the projection image processing section 32.
- the learning section 51 for the learning of a dictionary and the predicting section 52 for predicting a posture using the dictionary are realized by one apparatus. However, they may be realized respectively by a different apparatus.
- the dictionary generated in the apparatus having the learning section 51 is supplied to the apparatus having the predicting section 52, and used in predicting a posture.
- the learning section 101 for the machine learning of a posture predictor and the predicting section 102 for predicting a posture using the posture predictor are realized by one apparatus. However, they may be realized respectively by a different apparatus. In this case, the posture predictor generated in the apparatus having the learning section 101 is supplied to the apparatus having the predicting section 102, and used in predicting a posture.
- the control apparatus 1 is prepared as an apparatus in a housing separate from a projector. However, the above function of the control apparatus 1 may be incorporated in either one of a plurality of projectors.
- Each of a plurality of projectors and the control apparatus 1 are connected through wired or wireless communication. However, they may be connected through the Internet.
- the prediction of the posture of an object having symmetry as described above is applicable to systems other than the projection system described with reference to FIG. 1 .
- the above technology of posture prediction may be used with augmented reality (AR) and virtual reality (VR) for displaying contents on the basis of a predicted posture, gripping an object with a robot, and the like.
- AR augmented reality
- VR virtual reality
- processing sequences described in the above description can be implemented by hardware or software.
- programs of the software are installed from a program recording medium into a computer assembled in dedicated hardware, a general-purpose personal computer, or the like.
- FIG. 23 is a block diagram illustrating a configurational example of the hardware of a computer that performs the above processing sequences according to programs.
- control apparatus 1 is realized by a computer having the configuration illustrated in FIG. 23 .
- a CPU Central Processing Unit
- ROM Read Only Memory
- RAM Random Access Memory
- an input/output interface 205 To the bus 204, there is further connected an input/output interface 205. To the input/output interface 205, there are connected an input unit 206 including a keyboard, a mouse, etc., and an output unit 207 including a display, a speaker, etc. To the input/output interface 205, there are also connected a storage unit 208 including a hard disk, a nonvolatile memory, etc., a communication unit 209 including a network interface etc., and a drive 210 for driving a removable medium 211.
- the CPU 201 loads programs stored in the storage unit 208, for example, through the input/output interface 205 and the bus 204 into the RAM 203 and executes the programs, thereby performing the above processing sequences.
- the programs executed by the CPU 201 are recorded in the removable medium 211, for example, or provided through a wired or wireless transmission medium such as a local area network, the Internet, or digital broadcasts, and are installed in the storage unit 208.
- the programs executed by the computer may be programs to be processed in a chronological order according to the sequences described in the present description or programs to be processed concurrently or at necessary timings such as when called up.
- a system means a set of a plurality of components (apparatuses, modules (parts), etc.), and it does not matter whether all the components are housed in one housing or not. Therefore, a plurality of apparatuses housed in separate housings and interconnected through a network, and a single apparatus having a plurality of modules housed in a single housing are all referred to as a system.
- the present technology may be configured as a cloud computing system in which one function is shared by and processed in collaboration with a plurality of apparatuses via a network.
- the processing sequences included in the single step can be executed by a single apparatus or a plurality of apparatuses operating in collaboration with each other.
- the present technology can have arrangements described below.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Computational Linguistics (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Image Analysis (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018039313 | 2018-03-06 | ||
| PCT/JP2019/006202 WO2019171944A1 (fr) | 2018-03-06 | 2019-02-20 | Dispositif de traitement d'informations, procédé de traitement d'informations et programme |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3764323A1 true EP3764323A1 (fr) | 2021-01-13 |
| EP3764323A4 EP3764323A4 (fr) | 2021-04-28 |
| EP3764323B1 EP3764323B1 (fr) | 2023-09-06 |
Family
ID=67846514
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19763265.6A Active EP3764323B1 (fr) | 2018-03-06 | 2019-02-20 | Dispositif de traitement d'informations, procédé de traitement d'informations et programme |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11393124B2 (fr) |
| EP (1) | EP3764323B1 (fr) |
| JP (1) | JP7207396B2 (fr) |
| CN (1) | CN111801710A (fr) |
| WO (1) | WO2019171944A1 (fr) |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4582309B2 (ja) * | 2005-01-06 | 2010-11-17 | 株式会社ニコン | パターンマッチング装置 |
| JP4093273B2 (ja) * | 2006-03-13 | 2008-06-04 | オムロン株式会社 | 特徴点検出装置、特徴点検出方法および特徴点検出プログラム |
| KR100855631B1 (ko) * | 2006-12-26 | 2008-09-01 | (주)엔토시스 | 특징벡터 검출장치 및 방법, 그리고, 이를 이용한얼굴인식장치 및 방법 |
| JP5863440B2 (ja) * | 2010-12-28 | 2016-02-16 | キヤノン株式会社 | 情報処理装置および方法 |
| JP5895703B2 (ja) * | 2012-05-22 | 2016-03-30 | ソニー株式会社 | 画像処理装置及び画像処理方法、並びにコンピューター・プログラム |
| JP2016071547A (ja) * | 2014-09-29 | 2016-05-09 | キヤノン株式会社 | 情報処理装置とその制御方法、プログラム、記憶媒体 |
| JP6554900B2 (ja) | 2015-04-28 | 2019-08-07 | オムロン株式会社 | テンプレート作成装置及びテンプレート作成方法 |
| JP6829456B2 (ja) * | 2016-08-17 | 2021-02-10 | エイチエスティ・ビジョン株式会社 | 画像処理装置及び画像処理用プログラム |
| US10373369B2 (en) * | 2017-03-16 | 2019-08-06 | Qualcomm Technologies, Inc. | Three-dimensional pose estimation of symmetrical objects |
-
2019
- 2019-02-20 JP JP2020504905A patent/JP7207396B2/ja active Active
- 2019-02-20 US US16/976,719 patent/US11393124B2/en active Active
- 2019-02-20 CN CN201980016074.5A patent/CN111801710A/zh active Pending
- 2019-02-20 WO PCT/JP2019/006202 patent/WO2019171944A1/fr unknown
- 2019-02-20 EP EP19763265.6A patent/EP3764323B1/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20200410714A1 (en) | 2020-12-31 |
| JPWO2019171944A1 (ja) | 2021-02-18 |
| WO2019171944A1 (fr) | 2019-09-12 |
| US11393124B2 (en) | 2022-07-19 |
| EP3764323B1 (fr) | 2023-09-06 |
| JP7207396B2 (ja) | 2023-01-18 |
| EP3764323A4 (fr) | 2021-04-28 |
| CN111801710A (zh) | 2020-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10769496B2 (en) | Logo detection | |
| JP5451302B2 (ja) | 画像処理装置及び方法、プログラム及び記憶媒体 | |
| US10366307B2 (en) | Coarse-to-fine search method, image processing device and recording medium | |
| US11157749B2 (en) | Crowd state recognition device, learning method, and learning program | |
| CN111050150B (zh) | 焦距调节方法、装置、投影设备及存储介质 | |
| CN108875505B (zh) | 基于神经网络的行人再识别方法和装置 | |
| CN113112518B (zh) | 基于拼接图像的特征提取器生成方法、装置和计算机设备 | |
| US11544926B2 (en) | Image processing apparatus, method of processing image, and storage medium | |
| JP6492746B2 (ja) | 画像処理プログラム、画像処理装置、及び画像処理方法 | |
| CN105868767B (zh) | 人脸特征点定位方法和装置 | |
| CN108875506B (zh) | 人脸形状点跟踪方法、装置和系统及存储介质 | |
| Martinel et al. | Robust painting recognition and registration for mobile augmented reality | |
| JP2007025902A (ja) | 画像処理装置、画像処理方法 | |
| KR101817440B1 (ko) | 다중 카메라를 통한 3차원 모델 기반 객체 인식 기법과 시스템 | |
| JP2017130049A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| CN114882465A (zh) | 视觉感知方法、装置、存储介质和电子设备 | |
| EP3764323B1 (fr) | Dispositif de traitement d'informations, procédé de traitement d'informations et programme | |
| JP6202938B2 (ja) | 画像認識装置および画像認識方法 | |
| JP2015187769A (ja) | 物体検出装置、物体検出方法及びプログラム | |
| Mueller et al. | Combination of wide baseline image matching and tracking for autonomous uav approaches to a window | |
| JP2002140706A (ja) | 画像識別装置および画像データ処理装置 | |
| WO2017042852A1 (fr) | Appareil de reconnaissance d'objet, procédé de reconnaissance d'objet et support d'informations | |
| CN114140812A (zh) | 一种图元识别方法、装置、设备及介质 | |
| CN114972495A (zh) | 针对纯平面结构的物体的抓取方法、装置及计算设备 | |
| CN115455227B (zh) | 图形界面的元素搜索方法及电子设备、存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200827 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20210330 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: G06T 7/70 20170101AFI20210324BHEP Ipc: G06T 7/00 20170101ALI20210324BHEP Ipc: G06T 7/68 20170101ALI20210324BHEP Ipc: G06T 7/73 20170101ALI20210324BHEP |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: SONY GROUP CORPORATION |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20230413 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602019036877 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20230906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231207 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231206 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231207 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1609544 Country of ref document: AT Kind code of ref document: T Effective date: 20230906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240106 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240106 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240108 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602019036877 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| 26N | No opposition filed |
Effective date: 20240607 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230906 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240220 |